
Assessing the Role of Yarn Placement in Plated Knit Strain Sensors: A Detailed Study of Their Electromechanical Properties and Applicability in Bending Cycle Monitoring
 , , , , ,
, , , , ,
Abstract
:1. Introduction
2. Experimental
2.1. Materials and Methods
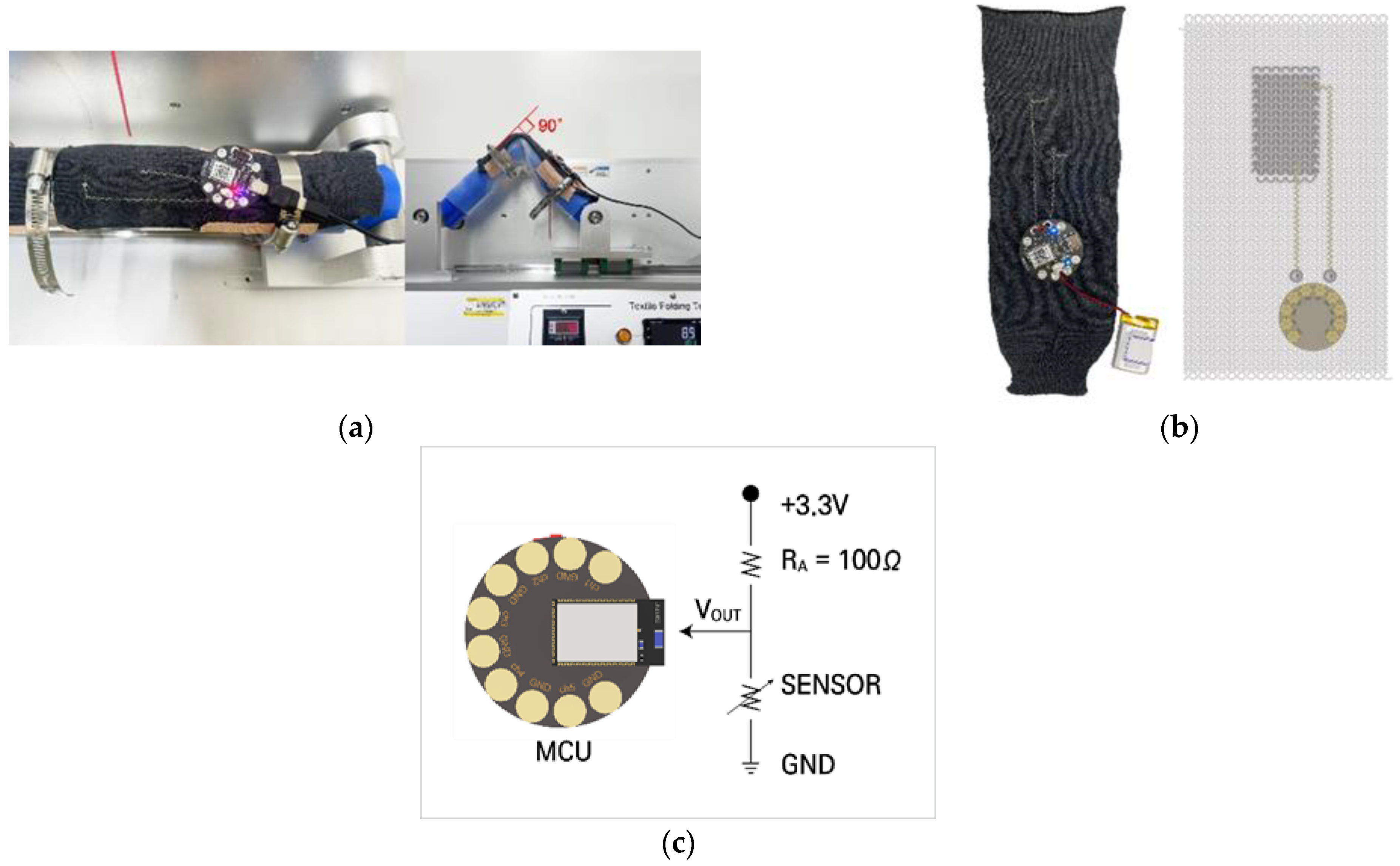
2.2. Electromechanical Test Setup
2.2.1. Measurement of Electromechanical Properties
2.2.2. Durability Test: Cyclic Flexing
Test Equipment Description
Design of a Durable Wireless Electronic System for Testing
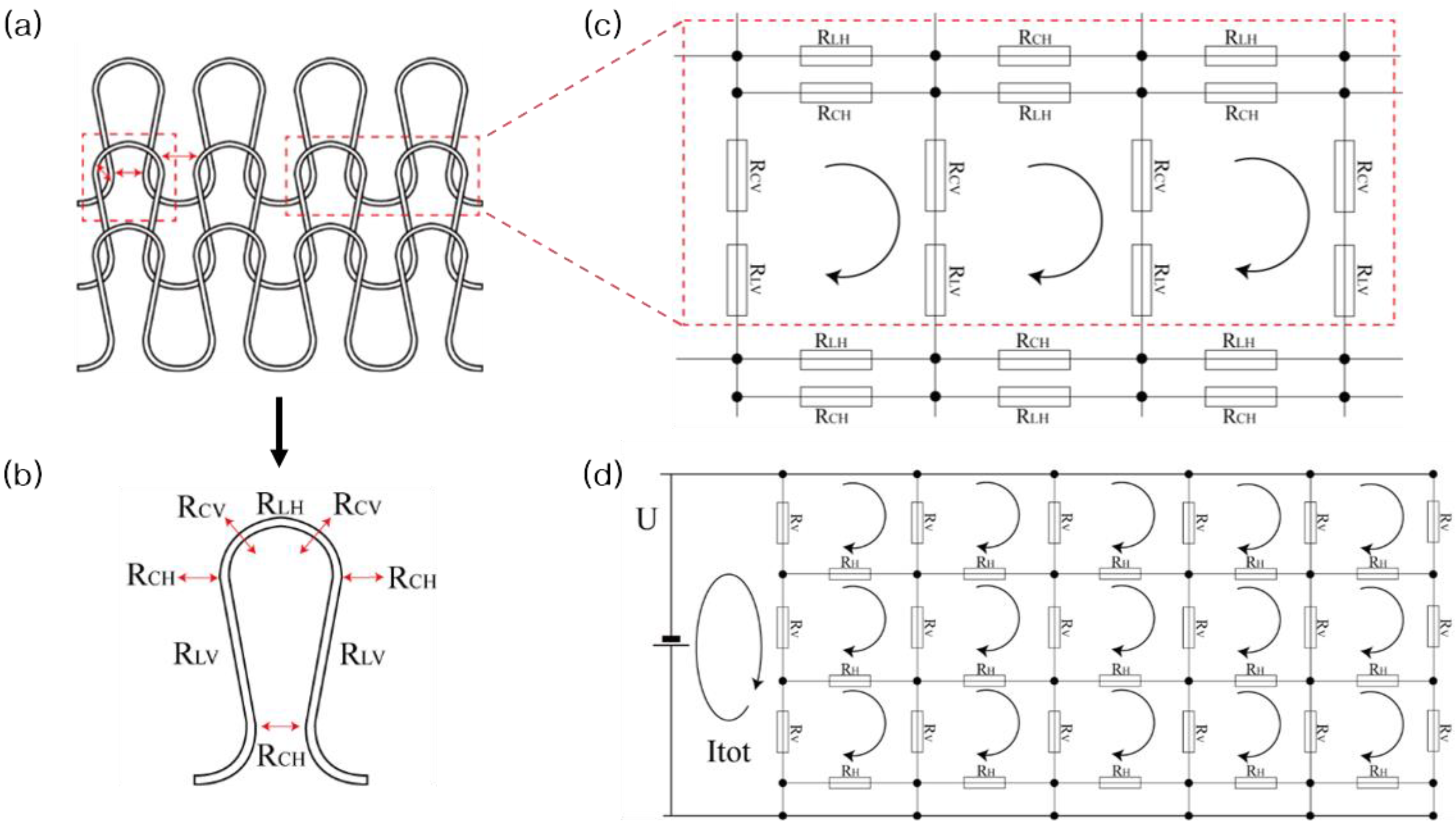
2.3. Modeling of the Plated Knitted Strain Sensor
3. Results and Discussion
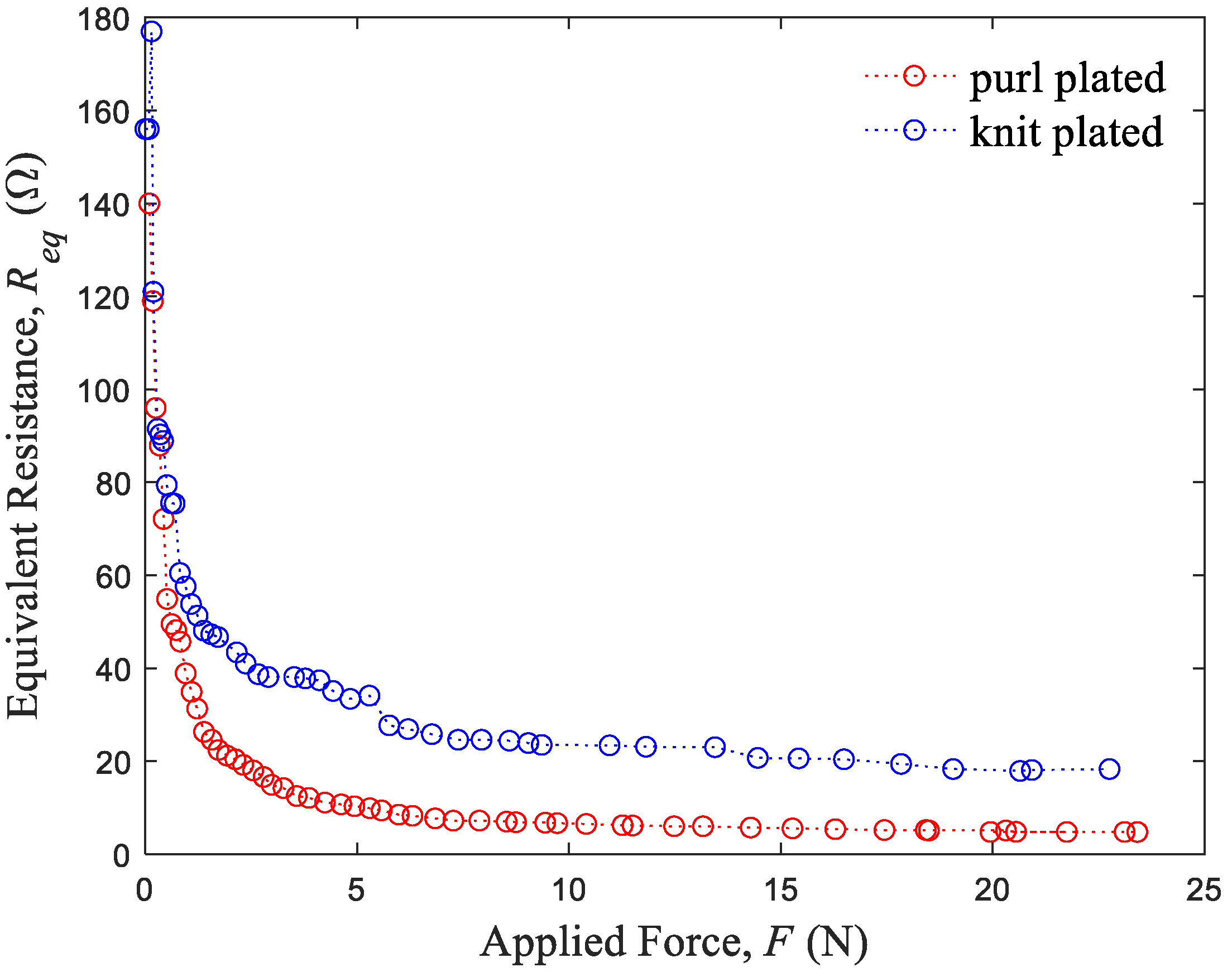
3.1. Stretching Test
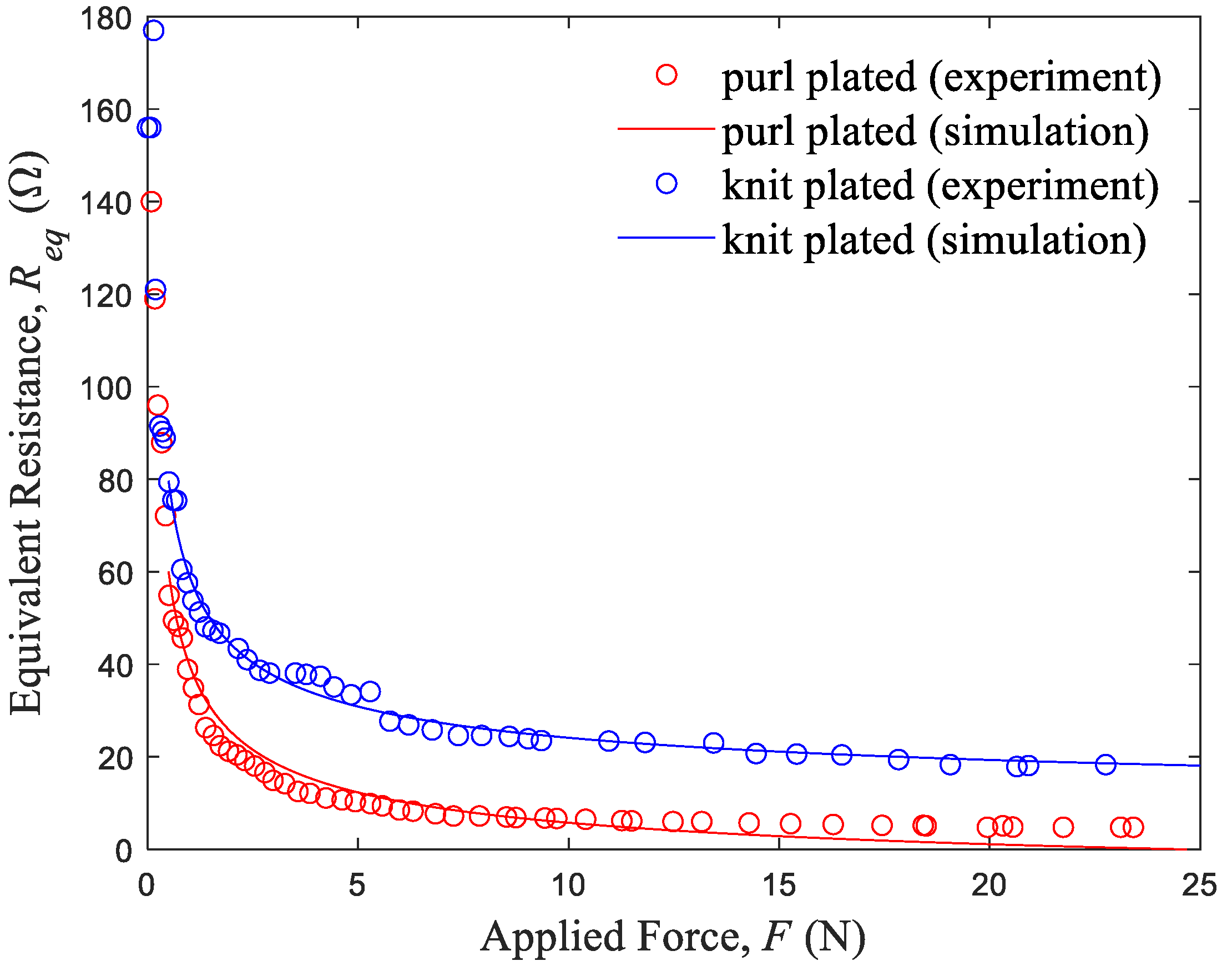
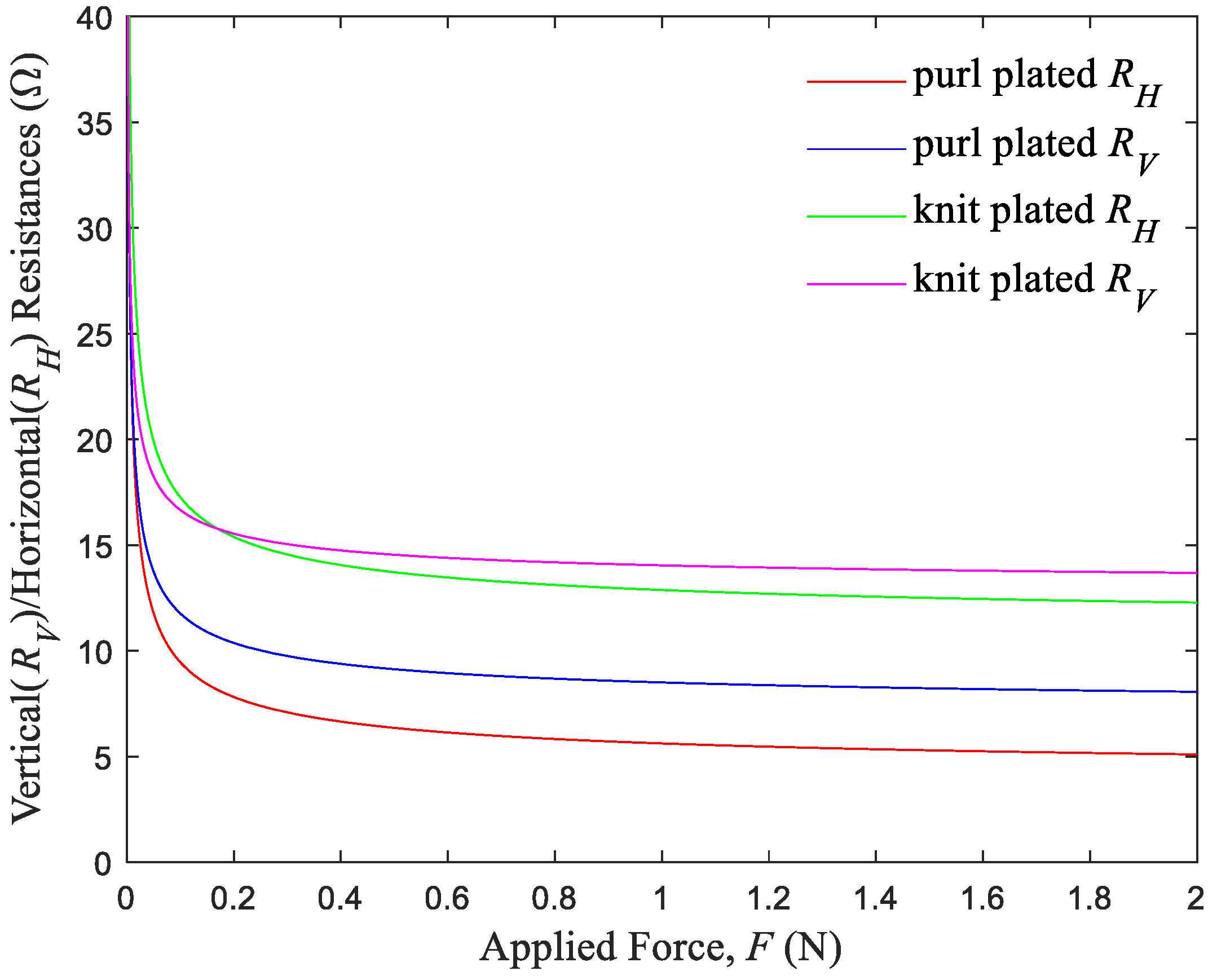
3.2. Simulated Results of Fabric Equivalent Resistance–Applied Force
3.3. Dynamic Bending Test of Textile Sensors
4. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhou, Z.; Chen, K.; Li, X.; Zhang, S.; Wu, Y.; Zhou, Y.; Meng, K.; Sun, C.; He, Q.; Fan, W.; et al. Sign-to-speech translation using machine-learning-assisted stretchable sensor arrays. Nat. Electron. 2020, 3, 571–578. [Google Scholar] [CrossRef]
- He, J.; Sun, Z.; Shi, Q.; Zhu, M.; Anaya, D.V.; Xu, M.; Chen, T.; Yuce, M.R.; Thean, A.V.Y.; Lee, C. Self-powered glove-based intuitive interface for diversified control applications in real/cyber space. Nano Energy 2019, 58, 641–651. [Google Scholar] [CrossRef]
- Wen, F.; Zhang, Z.; He, T.; Lee, C. AI enabled sign language recognition and VR space bidirectional communication using tribolectric smart glove. Nat. Commun. 2021, 12, 5378. [Google Scholar] [CrossRef]
- Zhu, M.; Sun, Z.; Zhang, Z.; Shi, Q.; He, T.; Liu, H.; Chen, T.; Lee, C. Haptic-feedback smart glove as a creative, human-machine interface (HMI) for virtual/augmented reality applications. Sci. Adv. 2020, 6, 19. [Google Scholar] [CrossRef]
- Lee, S.; Choi, Y.; Sung, M.; Bae, J.; Choi, Y. A Knitted Sensing Glove for Human Hand Postures Pattern Recognition. Sensors 2021, 21, 1364. [Google Scholar] [CrossRef]
- Si, S.; Sun, C.; Qiu, J.; Liu, J.; Yang, J. Knitting integral conformal all-textile strain sensor with commercial apparel characteristics for smart textiles. Appl. Mater. Today 2022, 27, 101508. [Google Scholar] [CrossRef]
- Wang, J.; Lu, C.; Zhang, K. Textile-Based Strain Sensor for Human Motion Detection. Energy Environ. Mater. 2020, 3, 80–100. [Google Scholar] [CrossRef]
- Zhou, X.; Hu, C.; Lin, X.; Han, X.; Zhao, X.; Hong, J. Polyaniline-Coated Cotton Knitted Fabric for Body Motion Monitoring. Sens. Actuators A Phys. 2021, 321, 112591. [Google Scholar] [CrossRef]
- Bozali, B.; Ghodrat, S.; Jansen, K.M.B. Design of Wearable Finger Sensors for Rehabilitation Applications. Micromachines 2023, 14, 710. [Google Scholar] [CrossRef]
- Esfahani, M.; Nussbaum, M. A “Smart” Undershirt for Tracking Upper Body Motions: Task Classification and Angle Estimation. IEEE Sens. J. 2018, 18, 7650–7658. [Google Scholar] [CrossRef]
- Vu, C.C.; Kim, J. Human Motion Recognition by Textile Sensors Based on Machine Learning Algorithms. Sensors 2018, 18, 3109. [Google Scholar] [CrossRef]
- Song, Y.; Lee, S.; Choi, Y.; Han, S.; Won, H.; Sung, T.H.; Choi, Y.; Bae, J. Design framework for a seamless smart glove using a digital knitting system. Fash. Text. 2021, 8, 6. [Google Scholar] [CrossRef]
- He, T.; Shi, Q.; Wang, H.; Wen, F.; Chen, T.; Chen, T.; Ouyang, J.; Lee, C. Beyond energy harvesting—Multi-functional triboelectric nanosensors on a textile. Nano Energy 2019, 57, 338–352. [Google Scholar] [CrossRef]
- Gentner, R.; Classen, J. Development and evaluation of a low-cost sensor glove for assessment of human finger movements in neurophysiological settings. J. Neurosci. Methods 2009, 178, 138–147. [Google Scholar] [CrossRef]
- Sun, F.; Dong, Z.; Din, Y.; Cong, H.; Ma, P. Seamless Weft Knit Vest with Integrated Needle Sensing Zone for Monitoring Shoulder Movement: A First Methodological Study. Materials 2023, 16, 5563. [Google Scholar] [CrossRef]
- Bozali, B.; Ghodrat, S.; Jansen, K.M.B. Development of a Knitted Strain Sensor for Health Monitoring Applications. Eng. Proc. 2023, 30, 10. [Google Scholar] [CrossRef]
- Zhou, M.; Wang, Y.; Chen, W.; Wang, J. Structural Design and Performance Research of a Knitted Flexible Sensor. ACS Omega 2022, 7, 21701–21713. [Google Scholar] [CrossRef]
- Raji, R.K.; Miao, X.; Zhang, S.; Li, Y.; Wan, A.; Boakye, A. Knitted piezoresistive strain sensor performance, impact of conductive area and profile design. J. Ind. Text. 2020, 50, 616–634. [Google Scholar] [CrossRef]
- Li, Y.; Miao, X.; Chen, J.Y.; Jiang, G.; Liu, Q. Sensing performance of knitted strain sensor on two-dimensional and three-dimensional surfaces. Mater. Des. 2021, 197, 109273. [Google Scholar] [CrossRef]
- Bozali, B.; van Dam, J.J.F.; Plaude, L.; Jansen, K.M.B. Development of hysteresis-free and linear knitted strain sensors for smart textile applications. In Proceedings of the IEEE Sensors, Sydney, Australia, 31 October–3 November 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Dong, K.; Wang, Y.C.; Deng, J.; Dai, Y.; Zhang, S.L.; Zou, H.; Gu, B.; Sun, B.; Wang, Z.L. A Highly Stretchable and Washable All-Yarn-Based Self-Charging Knitting Power Textile Composed of Fiber Triboelectric Nanogenerators and Supercapacitors. ACS Nano 2017, 11, 9490–9499. [Google Scholar] [CrossRef]
- Isaia, C.; McMaster, S.; McNally, D. The effect of washing on the electrical performance of knitted textile strain sensors for quantifying joint motion. J. Ind. Text. 2022, 51, 8528S–8548S. [Google Scholar] [CrossRef]
- Atalay, O.; Kennon, W.R.; Husain, M.D. Textile-Based Weft Knitted Strain Sensors: Effect of Fabric Parameters on Sensor Properties. Sensors 2013, 13, 11114–11127. [Google Scholar] [CrossRef]
- Xie, J.; Long, H.; Miao, M. High sensitivity knitted fabric strain sensors. Smart Mater. Struct. 2016, 25, 105008. [Google Scholar] [CrossRef]
- Raji, R.K.; Miao, X.; Zhang, S.; Li, Y. A comparative study of knitted strain sensors fabricated with conductive composite and coated yarns. Int. J. Cloth. Sci. Technol. 2019, 31, 181–194. [Google Scholar] [CrossRef]
- Liu, S.; Liu, Y.; Li, L. The impact of different proportions of knitting elements on the resistive properties of conductive fabrics. Text. Res. J. 2019, 89, 881–890. [Google Scholar] [CrossRef]
- Liu, S.; Yang, C.; Zhao, Y.; Tao, X.M.; Tong, J.; Li, L. The impact of float stitches on the resistance of conductive knitted structures. Text. Res. J. 2016, 86, 1455–1473. [Google Scholar] [CrossRef]
- Warncke, M.N.; Böhmer, C.H.; Sachse, C.; Fischer, S.; Häntzsche, E.; Nocke, A.; Mersch, J.; Cherif, C. Advancing Smart Textiles: Structural Evolution of Knitted Piezoresistive Strain Sensors for Enabling Precise Motion Capture. Polymers 2023, 15, 3936. [Google Scholar] [CrossRef]
- Liang, X.; Cong, H.; Dong, Z.; Jiang, G. Size Prediction and Electrical Performance of Knitted Strain Sensors. Polymers 2022, 14, 2354. [Google Scholar] [CrossRef]
- Bozali, B.; Ghodrat, S.; Plaude, L.; van Dam, J.J.F.; Jansen, K.M.B. Development of Low Hysteresis, Linear Weft-Knitted Strain Sensors for Smart Textile Applications. Sensors 2022, 22, 7688. [Google Scholar] [CrossRef]
- Chia, P.Z.; Gupta, U.; Tan, Y.Y.; Lau, J.L.; Ahmed, A.; Soh, G.S.; Low, H.Y. Effect of Stitch Pattern on the Electrical Properties of Wale-wise Knitted Strain Sensors and Interconnects. In Proceedings of the IEEE Sensors, Sydney, Australia, 31 October–3 November 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Jansen, K.M.B. Performance Evaluation of Knitted and Stitched Textile Strain Sensors. Sensors 2020, 20, 7236. [Google Scholar] [CrossRef]
- Atalay, O.; Tuncay, A.; Husain, M.D.; Kennon, W.R. Comparative study of the weft-knitted strain sensors. J. Ind. Text. 2017, 46, 1212–1240. [Google Scholar] [CrossRef]
- Zhang, Y.; Long, H. Resistive network model of the weft-knitted strain sensor with the plating stitch-Part 1: Resistive network model under static relaxation. J. Eng. Fibers Fabr. 2020, 15, 1–16. [Google Scholar] [CrossRef]
- Zhang, H.; Tao, X.; Wang, S.; Yu, T. Electro-Mechanical Properties of Knitted Fabric Made from Conductive Multi-Filament Yarn under Unidirectional Extension. Text. Res. J. 2005, 75, 598–606. [Google Scholar] [CrossRef]
- Holm, R.; Holm, E. Electric Contact Theory and Application; Springer: Berlin/Heidelberg, Germany, 1967. [Google Scholar]
- Keum, K.; Cho, S.S.; Jo, J.W.; Park, S.K.; Kim, Y.H. Mechanically robust textile-based strain and pressure multimodal sensors using metal nanowire/polymer conducting fibers. iScience 2022, 25, 104032. [Google Scholar] [CrossRef] [PubMed]
- Hong, J.; Pan, Z.; Yao, M.; Chen, J.; Zhang, Y. A large-strain weft-knitted sensor fabricated by conductive UHMWPE/PANI composite yarns. Sens. Actuators A Phys. 2016, 238, 307–316. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Parameters | Output Parameters |
|---|---|
| NW = 100 | RV |
| Wale Number: 14 | |
| Course Number: 27 | RH |
| Loop geometrical factors: | |
| L1 = 1.5 mm, L2 = 1.0 mm, L3 = 2.0 mm | Req |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, Y.-H.; Jun, J.; Oh, Y.-K.; Choi, H.-J.; Lee, M.-J.; Min, K.-S.; Kim, S.-H.; Lee, H.; Nam, H.-S.; Singh, S.; et al. Assessing the Role of Yarn Placement in Plated Knit Strain Sensors: A Detailed Study of Their Electromechanical Properties and Applicability in Bending Cycle Monitoring. Sensors 2024, 24, 1690. https://doi.org/10.3390/s24051690
Kim Y-H, Jun J, Oh Y-K, Choi H-J, Lee M-J, Min K-S, Kim S-H, Lee H, Nam H-S, Singh S, et al. Assessing the Role of Yarn Placement in Plated Knit Strain Sensors: A Detailed Study of Their Electromechanical Properties and Applicability in Bending Cycle Monitoring. Sensors. 2024; 24(5):1690. https://doi.org/10.3390/s24051690
Chicago/Turabian StyleKim, Youn-Hee, Juwon Jun, You-Kyung Oh, Hee-Ji Choi, Mi-Jung Lee, Kyeong-Sik Min, Sung-Hyon Kim, Hyunseung Lee, Ho-Seok Nam, Son Singh, and et al. 2024. "Assessing the Role of Yarn Placement in Plated Knit Strain Sensors: A Detailed Study of Their Electromechanical Properties and Applicability in Bending Cycle Monitoring" Sensors 24, no. 5: 1690. https://doi.org/10.3390/s24051690