
GPS-Free Wireless Precise Positioning System for Automatic Flying and Landing Application of Shipborne Unmanned Aerial Vehicle

Abstract
:1. Introduction
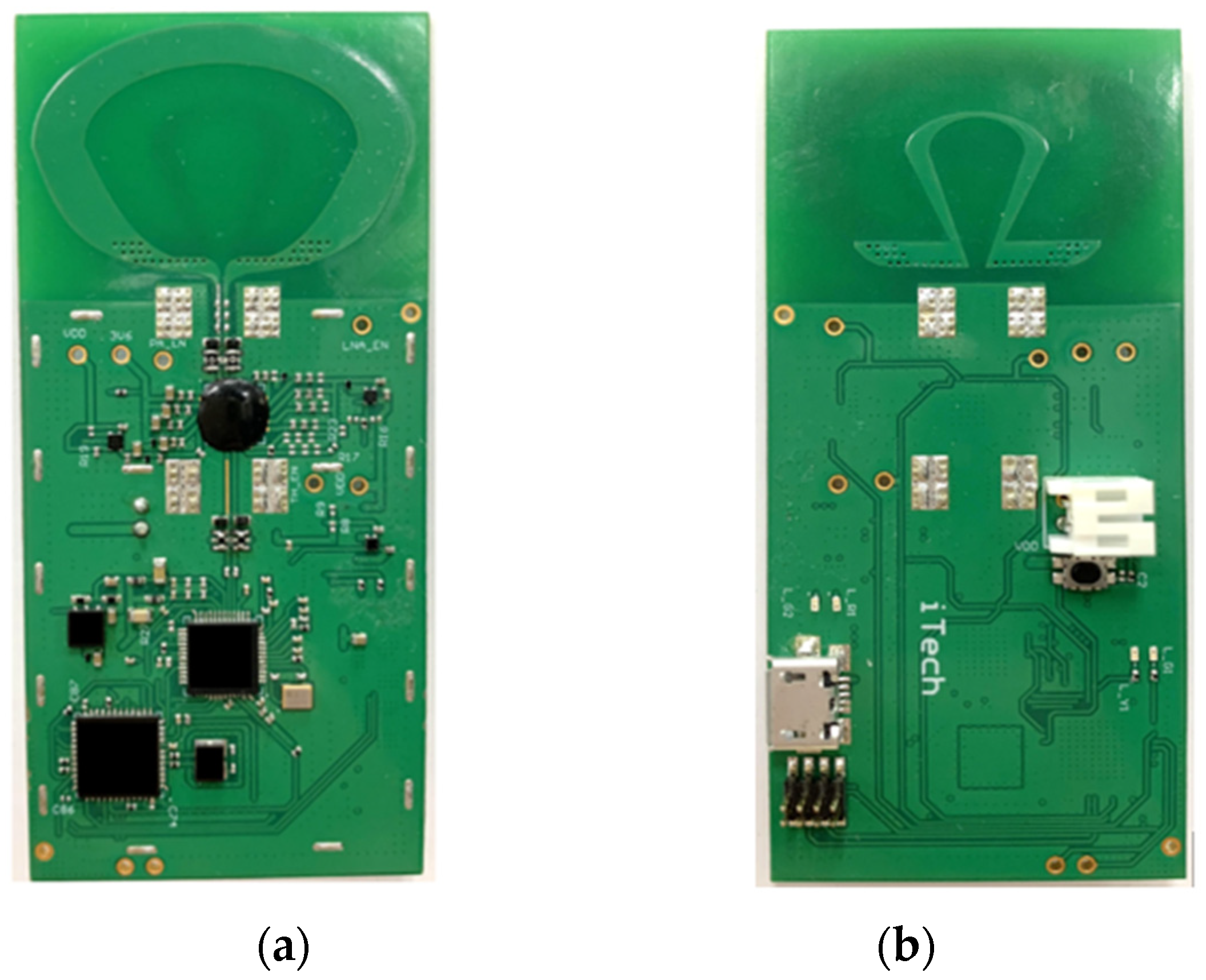
- Hardware: The UWB antenna and the corresponding module with ICs are designed, fabricated, and measured. A good agreement between simulation and measurement is obtained.
- Software: A positioning algorithm with optimal gradient descent method is developed and embedded into 32-bit MCU to localize the drone’s 3D coordinates.
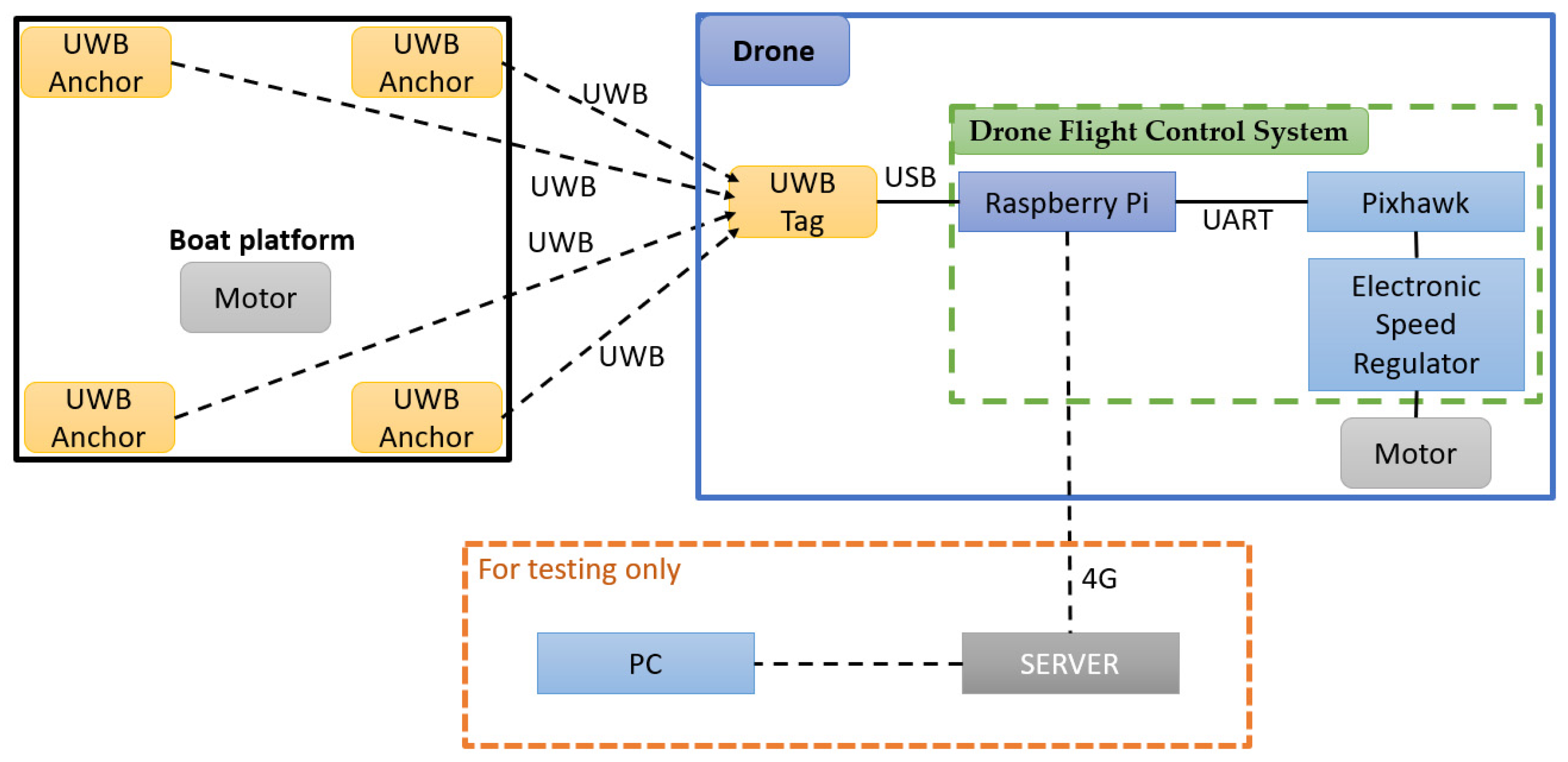
- System integration: The application scenario of drone landing is established and the shipborne UAV automatic landing system is realized. Hence, the usefulness of our proposed technology in adapting to various complex environments is verified.
2. GPS-Free Wireless Precise Positioning System Design
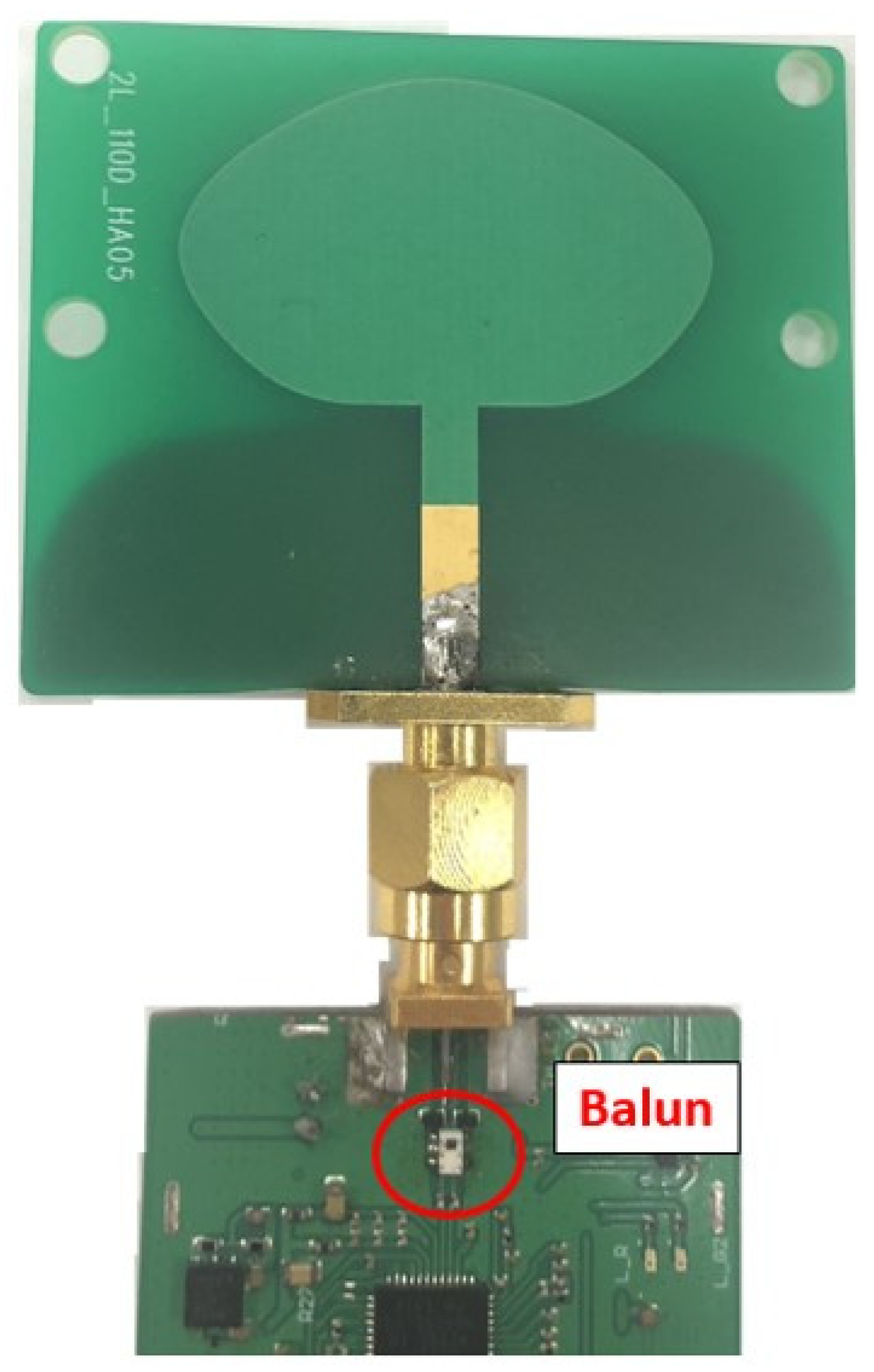
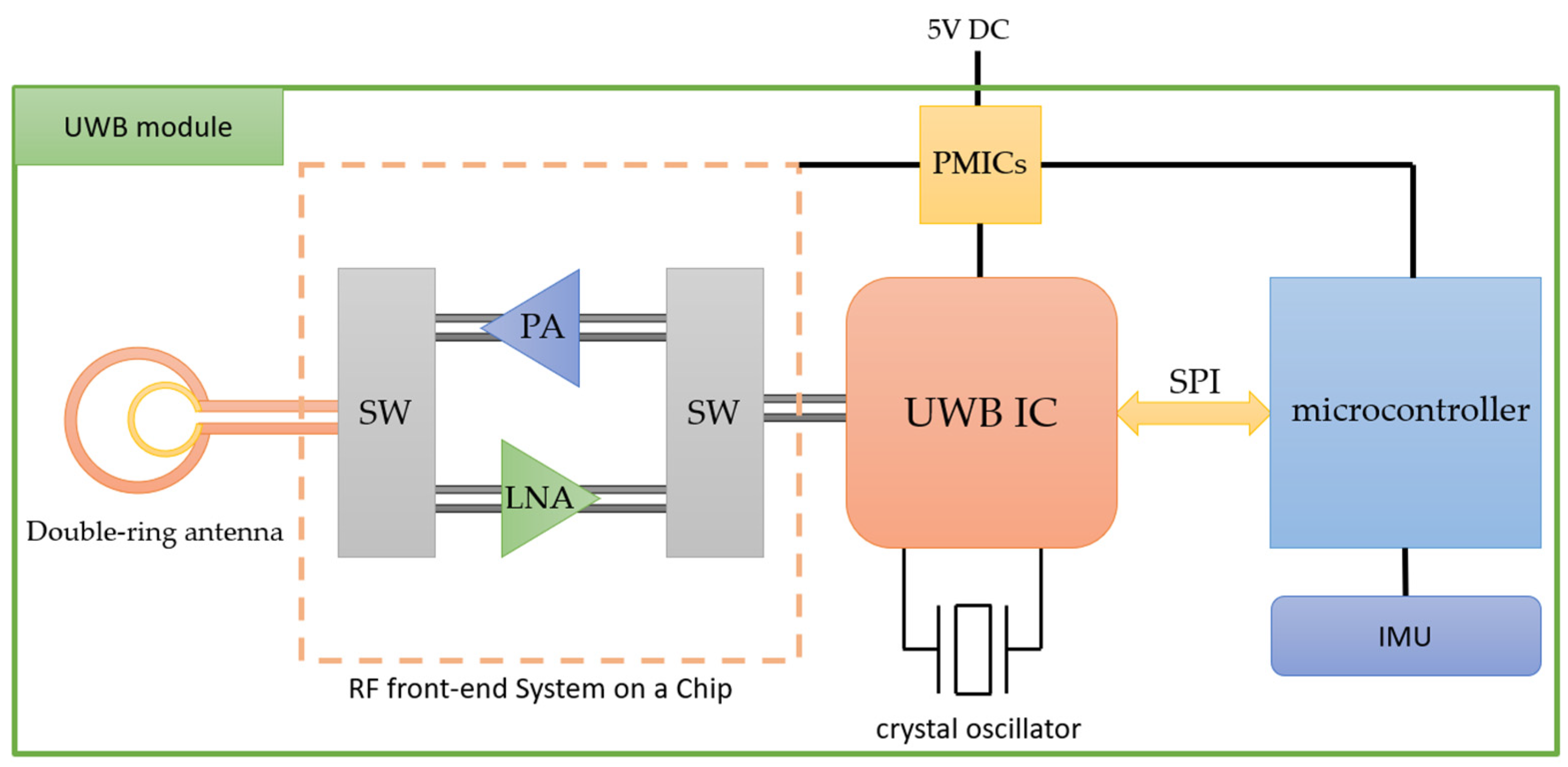
2.1. UWB Module Design
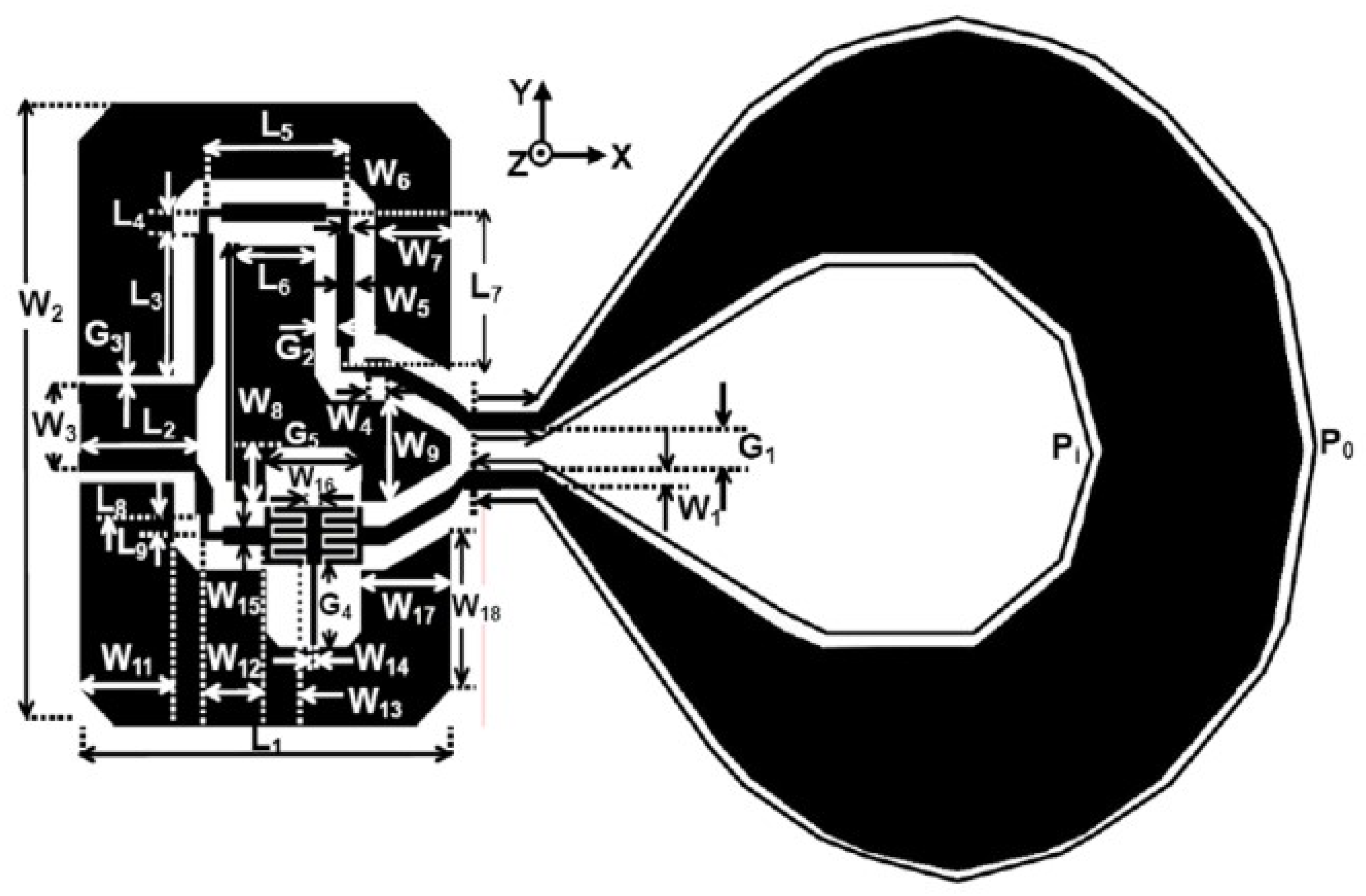
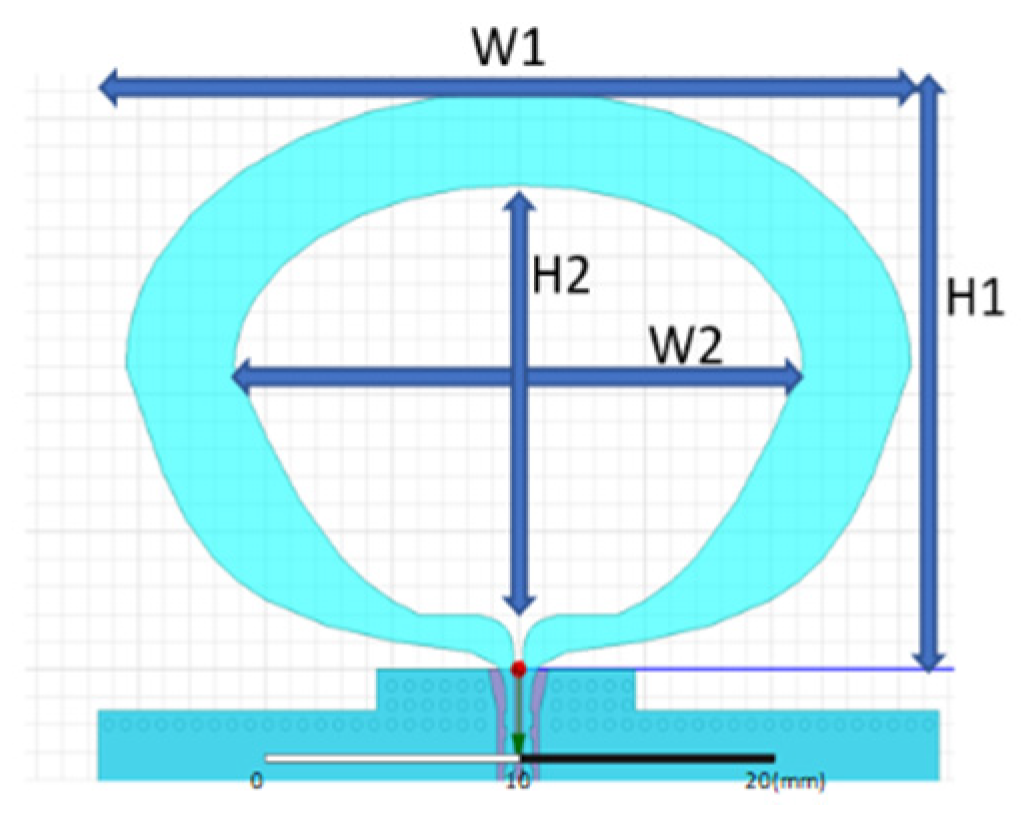
2.1.1. Antenna Design
2.1.2. Wireless Precision Positioning Integration Board
2.2. Algorithm for Drone Positioning Technology
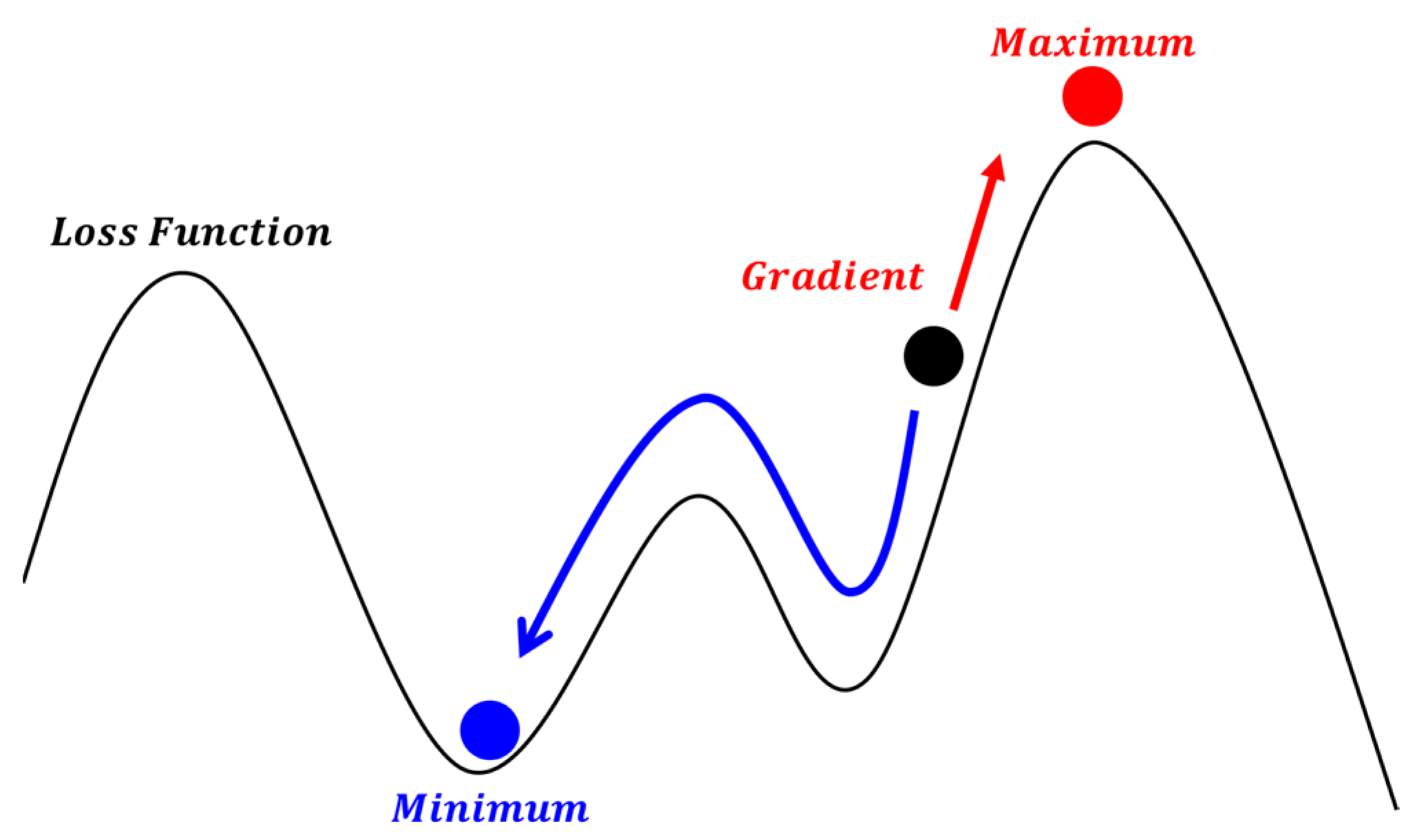
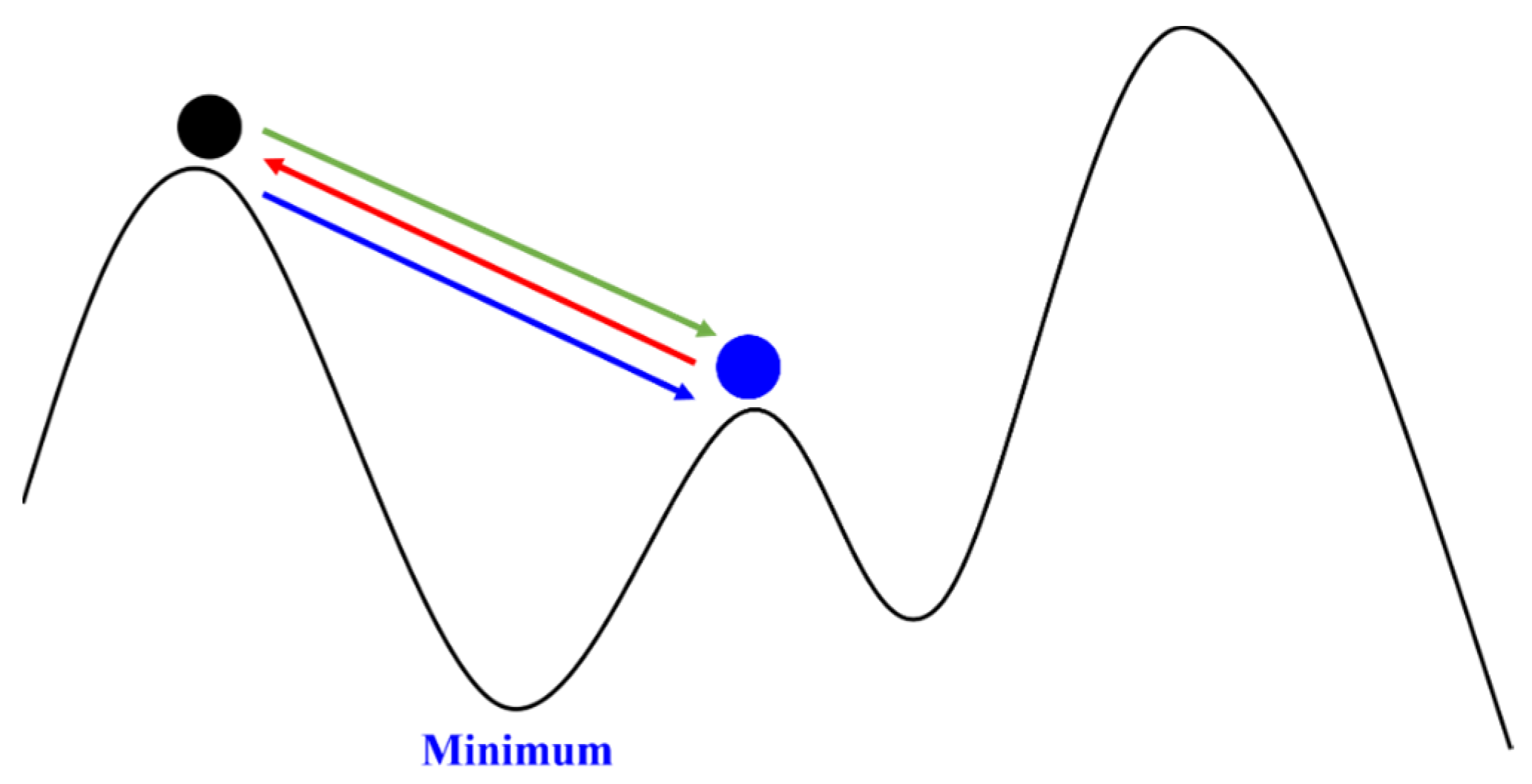
2.2.1. Gradient Descent Method
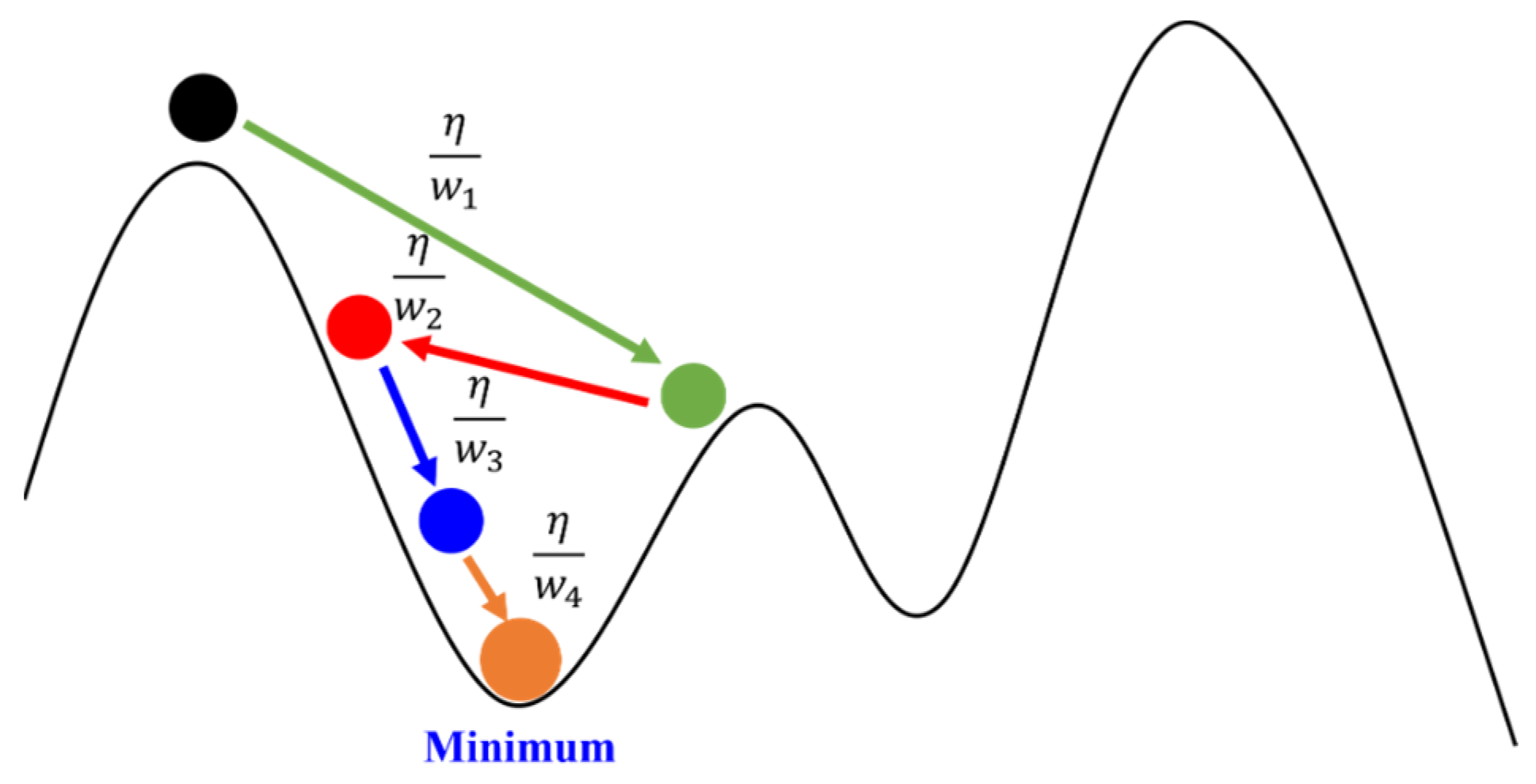
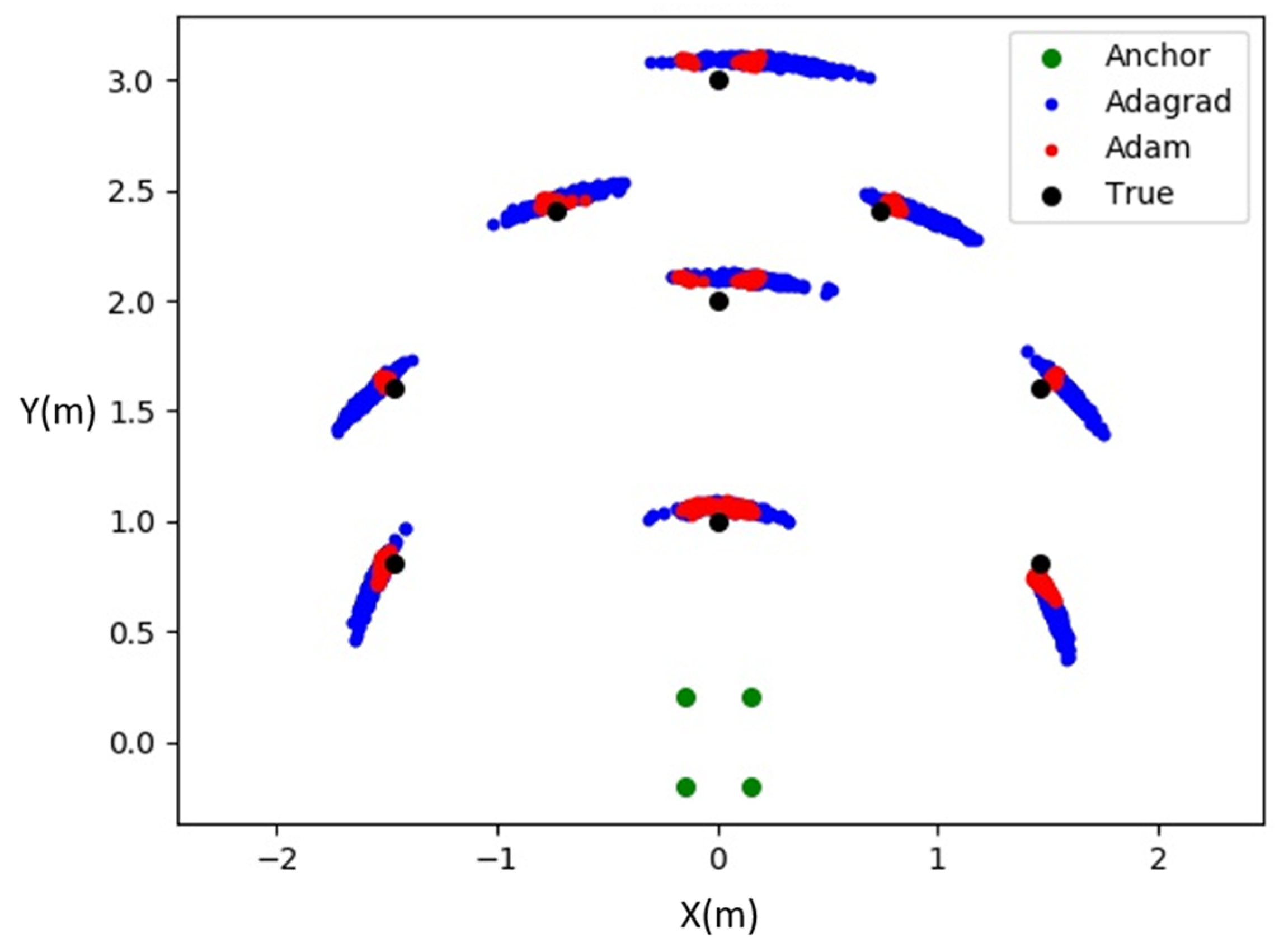
2.2.2. Adaptive Gradient Method (AdaGrad)
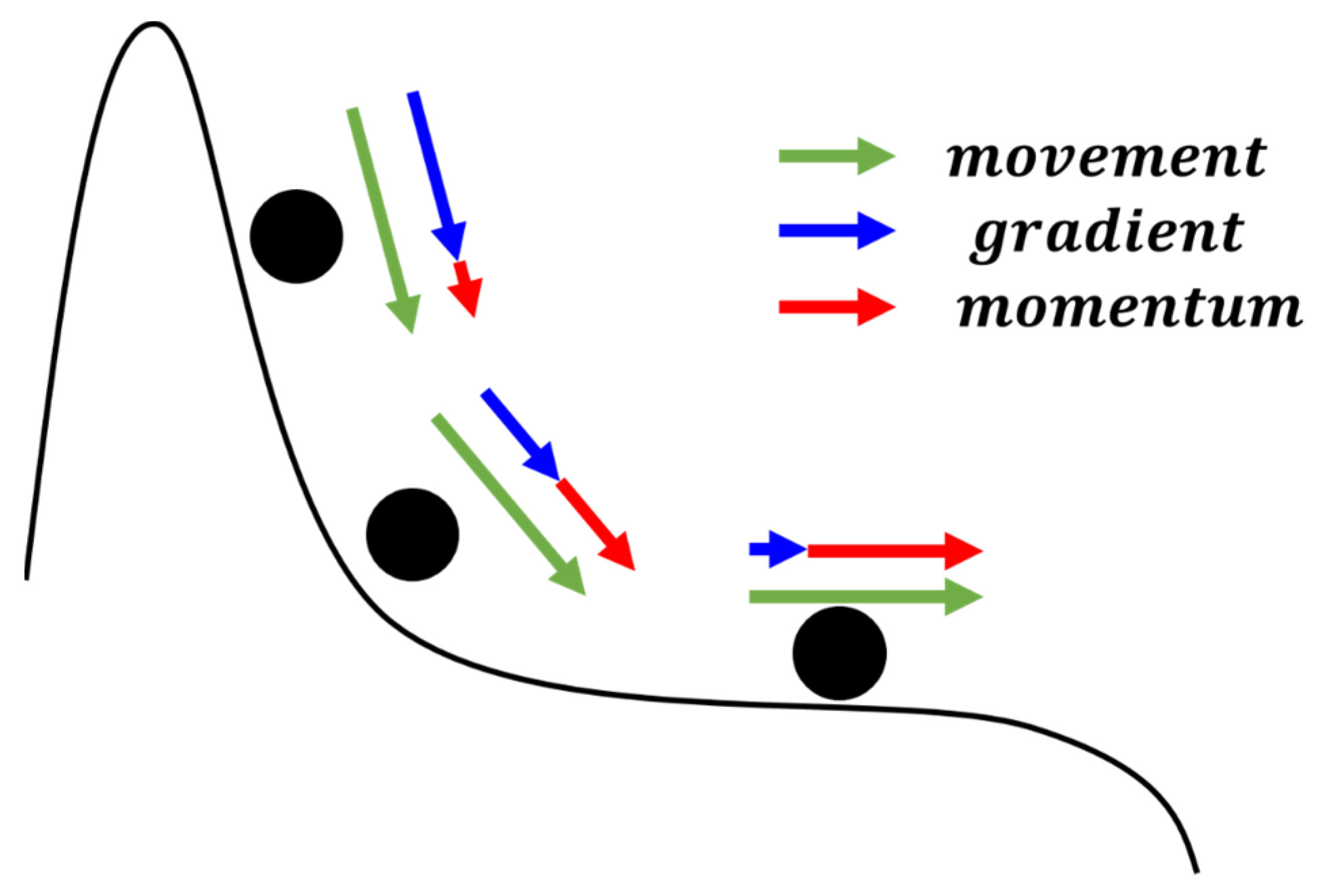
2.2.3. Improved Version of Adagrad (Adam)
2.2.4. Kalman Filter Implementation
2.3. Flight Control System Design
3. Results
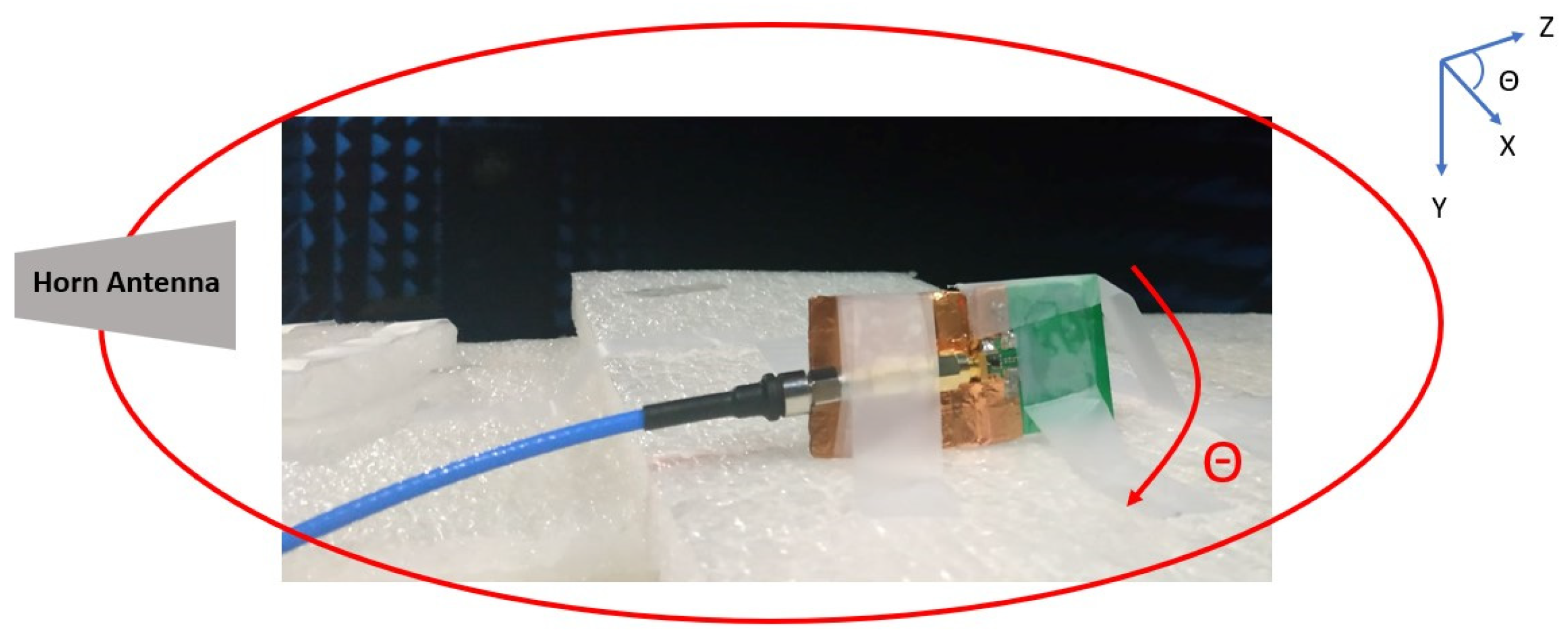
3.1. Antenna Measurement
3.1.1. Gain and Radiation Pattern
3.1.2. Group Delay
3.2. UWB Module
3.3. Positioning Technology Measurement
3.4. Drone Control System and Vessel Structure Design
3.5. Tilt Compensation
4. Integration and Verification of the Positioning System and Ship-Borne Platform
4.1. Static Testing
4.2. Dynamic Testing
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, L. Developing Drone Tactics to Support National Defense Autonomy. Youth Daily News, 11 February 2021. Available online: https://www.ydn.com.tw/news/newsInsidePage?chapterID=1332841&type=forum (accessed on 9 January 2024).
- Chen, C. Defending Against Russia’s GPS System Disruption: US and UK Searching for Alternatives. Liberty Times, 24 May 2022. Available online: https://news.ltn.com.tw/news/world/breakingnews/3937580 (accessed on 9 January 2024).
- Zhang, Y.; Hsiung-Cheng, L.; Zhao, J.; Zewen, M.; Ye, Z.; Sun, H. A Multi-DoF Ultrasonic Receiving Device for Indoor Positioning of AGV System. In Proceedings of the 2018 International symposium on computer, consumer and control (IS3C), Taichung, Taiwan, 6–8 December 2018. [Google Scholar]
- Yao, W.; Ma, L. Research and Application of Indoor Positioning Method Based on Fixed Infrared Beacon. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018. [Google Scholar]
- Zhuang, Y.; Li, Y.; Qi, L.; Lan, H.; Yang, J.; El-Sheimy, N. A Two-Filter Integration of MEMS Sensors and WiFi Fingerprinting for Indoor Positioning. IEEE Sens. J. 2016, 16, 5125–5126. [Google Scholar] [CrossRef]
- Luo, H.; Li, Y.; Wang, J.; Weng, D.; Ye, J.; Hsu, L.-T.; Chen, W. Integration of GNSS and BLE Technology with Inertial Sensors for Real-Time Positioning in Urban Environments. IEEE Access 2021, 9, 2169–3536. [Google Scholar] [CrossRef]
- Yue, J.; Wen, W.; Han, J.; Hsu, L.-T. 3D Point Clouds Data Super Resolution-Aided LiDAR Odometry for Vehicular Positioning in Urban Canyons. IEEE Trans. Veh. Technol. 2021, 70, 4098–4112. [Google Scholar] [CrossRef]
- Cheng, H.; Xiao, C.; Ji, Y.; Ni, J.; Wang, T. A Single LED Visible Light Positioning System Based on Geometric Features and CMOS Camera. IEEE Photonics Technol. Lett. 2020, 32, 1097–1100. [Google Scholar] [CrossRef]
- Zhu, X.; Yi, J.; Cheng, J.; He, L. Adapted Error Map Based Mobile Robot UWB Indoor Positioning. IEEE Trans. Instrum. Meas. 2020, 69, 6336–6350. [Google Scholar] [CrossRef]
- Yin, Z.; Jiang, X.; Yang, Z.; Zhao, N.; Chen, Y. WUB-IP: A High-Precision UWB Positioning Scheme for Indoor Multiuser Applications. IEEE Syst. J. 2017, 13, 279–288. [Google Scholar] [CrossRef]
- Sipal, V.; Allen, B.; Edwards, D.; Honary, B. Twenty years of ultrawideband: Opportunities and challenges. IET Commun. 2012, 6, 1147–1162. [Google Scholar] [CrossRef]
- Guo, X.; Elikplim, N.R.; Ansari, N.; Li, L.; Wang, L. Robust WiFi Localization by Fusing Derivative Fingerprints of RSS and Multiple Classifiers. IEEE Trans. Ind. Inform. 2019, 16, 3177–3186. [Google Scholar] [CrossRef]
- Gao, Z.; Gao, Y.; Wang, S.; Li, D.; Xu, Y. CRISLoc: Reconstructable CSI Fingerprinting for Indoor Smartphone Localization. IEEE Internet Things J. 2020, 8, 3422–3437. [Google Scholar] [CrossRef]
- Huang, S.-P.; Chen, C.-B.; Wei, T.-Z.; Tsai, W.-T.; Liou, C.-Y.; Mao, Y.-M.; Sheng, W.-H.; Mao, S.-G. Range-Extension Algorithms and Strategies for TDOA Ultra-Wideband Positioning System. Sensors 2023, 23, 3088. [Google Scholar] [CrossRef] [PubMed]
- Miranda, V.R.F.; Rezende, A.M.C.; Rocha, T.L.; Azpúrua, H.; Pimenta, L.C.A.; Freitas, G.M. Autonomous navigation system for a delivery drone. J. Control. Autom. Electr. Syst. 2022, 33, 141–155. [Google Scholar] [CrossRef]
- Xia, K.; Shin, M.; Chung, W.; Kim, M.; Lee, S.; Son, H. Landing a quadrotor UAV on a moving platform with sway motion using robust control. Control. Eng. Pract. 2022, 128, 105288. [Google Scholar] [CrossRef]
- Sipal, V.; John, M.; Neirynck, D.; McLaughlin, M.; Ammann, M. Advent of practical UWB localization: (R)Evolution in UWB antenna research. In Proceedings of the 8th European Conference on Antennas and Propagation (EuCAP 2014), Hague, The Netherlands, 6–11 April 2014; pp. 1561–1565. [Google Scholar]
- TDK Balun HHM1595A1, TDK. Available online: https://product.tdk.com/en/search/rf/rf/balun/info?part_no=HHM1595A1 (accessed on 9 January 2024).
- Schantz, H.G. The Art and Science of Ultrawideband Antennas; Artech House: Boston, MA, USA; London, UK, 2015. [Google Scholar]
- Tuovinen, T.; Yazdandoost, K.Y.; Iinatti, J. Ultra wideband loop antenna for on-body communication in wireless body area network. In Proceedings of the 2012 6th European Conference on Antennas and Propagation (EUCAP), Prague, Czech Republic, 26–30 March 2012; pp. 1349–1352. [Google Scholar]
- Mao, S.; Chen, S. Frequency- and time-domain characterizations of ultrawideband tapered loop antennas. IEEE Trans. Antennas Propag. 2007, 55, 3698–3701. [Google Scholar] [CrossRef]
- Shannon, C.E. Communication in the presence of noise. Proc. IEEE 1998, 86, 447–457. [Google Scholar] [CrossRef]
- Implementation of Two-Way Ranging with the DW1000 (Application Note APS013). Available online: https://www.qorvo.com/products/d/da008448 (accessed on 30 November 2022).
- Barral, V.; Escudero, C.J.; García-Naya, J.A.; Maneiro-Catoira, R. NLOS Identification and Mitigation Using Low-Cost UWB Devices. Sensors 2019, 19, 3464. [Google Scholar] [CrossRef] [PubMed]
- Liu, A.; Lin, S.; Wang, J.; Kong, X. A Succinct Method for Non-Line-of-Sight Mitigation for Ultra-Wideband Indoor Positioning System. Sensors 2022, 22, 8247. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.-Y.; Huang, S.-P.; Wu, T.-W.; Tsai, W.-T.; Liou, C.-Y.; Mao, S.-G. UWB System for Indoor Positioning and Tracking with Arbitrary Target Orientation, Optimal Anchor Location, and Adaptive NLOS Mitigation. IEEE Trans. Veh. Technol. 2020, 69, 9304–9314. [Google Scholar] [CrossRef]
- Li, A.; Luan, F. An Improved Localization Algorithm Based on CHAN with High Positioning Accuracy in NLOS-WGN Environment. In Proceedings of the 2018 10th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), Hangzhou, China, 25–26 August 2018; Volume 1, pp. 332–335. [Google Scholar]
- Ilboudo, W.E.L.; Kobayashi, T.; Sugimoto, K. Robust Stochastic Gradient Descent with Student-t Distribution Based First-Order Momentum. IEEE Trans. Neural Netw. Learn. Syst. 2022, 33, 1324–1337. [Google Scholar] [CrossRef] [PubMed]
- Arasaratnam, I.; Haykin, S.S. Cubature Kalman Filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Positioning Technology | Advantages | Disadvantages |
|---|---|---|
| Ultrasound |
|
|
| Infrared |
|
|
| WiFi |
|
|
| Bluetooth |
|
|
| Laser |
|
|
| Cameras |
|
|
| UWB |
|
|
| Parameter | Size (mm) | Parameter | Size (mm) |
|---|---|---|---|
| Ha | 21 | H2 | 17.6 |
| Wa | 31 | W2 | 22.4 |
| Hm | 50 | H3 | 13.2 |
| Wm | 33.6 | W3 | 11.6 |
| H1 | 21 | H4 | 12.7 |
| W1 | 31 | W4 | 7.8 |
| MSE(m) | Adagrad | Adam |
|---|---|---|
| Pos1 | 0.237 | 0.073 |
| Pos2 | 0.155 | 0.077 |
| Pos3 | 0.255 | 0.089 |
| Pos4 | 0.282 | 0.186 |
| Pos5 | 0.220 | 0.187 |
| Pos6 | 0.141 | 0.114 |
| Pos7 | 0.131 | 0.053 |
| Pos8 | 0.143 | 0.059 |
| Pos9 | 0.175 | 0.059 |
| Distance (m) | Root Mean Square Error of Simulated Positioning (m) |
|---|---|
| 10 | 0.11 |
| 50 | 0.53 |
| 100 | 0.99 |
| 200 | 2.18 |
| 300 | 4.16 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lo, T.-Y.; Chang, J.-Y.; Wei, T.-Z.; Chen, P.-Y.; Huang, S.-P.; Tsai, W.-T.; Liou, C.-Y.; Lin, C.-C.; Mao, S.-G. GPS-Free Wireless Precise Positioning System for Automatic Flying and Landing Application of Shipborne Unmanned Aerial Vehicle. Sensors 2024, 24, 550. https://doi.org/10.3390/s24020550
Lo T-Y, Chang J-Y, Wei T-Z, Chen P-Y, Huang S-P, Tsai W-T, Liou C-Y, Lin C-C, Mao S-G. GPS-Free Wireless Precise Positioning System for Automatic Flying and Landing Application of Shipborne Unmanned Aerial Vehicle. Sensors. 2024; 24(2):550. https://doi.org/10.3390/s24020550
Chicago/Turabian StyleLo, Tsu-Yu, Je-Yao Chang, Tan-Zhi Wei, Pin-Yen Chen, Shih-Ping Huang, Wei-Ting Tsai, Chong-Yi Liou, Chun-Cheng Lin, and Shau-Gang Mao. 2024. "GPS-Free Wireless Precise Positioning System for Automatic Flying and Landing Application of Shipborne Unmanned Aerial Vehicle" Sensors 24, no. 2: 550. https://doi.org/10.3390/s24020550