1. Introduction
The silvopastoral ecosystem characteristic of the Iberian Peninsula, known as the Montado in Portugal and the Dehesa in Spain, is a mixed system that integrates, in the same place, agronomic crops (e.g., cereals, forage, or pastures), a tree stratum (e.g., Oak trees) and livestock [
1] and has been proposed to optimise economic and environmental benefits, including income from animal production, the condition of farm woodlands, and carbon sequestration [
2]. Such ecosystems play a crucial role in sustaining local communities and their economies in regions with marginal soils, by providing them with an additional income through livestock farming [
3]. Traditional practices carried out in these areas are often regarded as environmentally friendly and landscape-preserving, and the fields are also considered to be of high natural value [
3,
4]. This ecosystem covers an estimated area of 850,000 square kilometres in the Mediterranean basin, mostly occupying areas characterised by unfavourable soil and climatic conditions [
3]. Sustaining an important economic activity for local populations, while maintaining the pastures’ productivity and avoiding land degradation is a challenge that will determine the socio-economic viability and environmental conservation of these semi-arid areas in the face of climate change [
3].
The economic and environmental sustainability of extensive livestock production systems requires the optimisation of soil management, pasture production and animal grazing [
5], which justifies the actual research interest in animal/soil interactions [
1] or in tree/soil interactions [
6]. Livestock production is, however, associated with some negative environmental impacts on pasture quality or on soil attributes, becoming a precursor to degradation processes [
7]. About 20% of the world’s pasture areas are degraded as a consequence of overgrazing and its associated erosion and compaction [
8], where the main impact mentioned is the soil compaction by animal trampling [
2]. According to Jordon [
9] and Drewry et al. [
10], a cow exerts a greater static pressure (160–190 kPa) on soil than a sheep (approximately 80 kPa), because of their low ratio of body weight to soil contact area [
8]. In the specific case of the bovine breeds involved in this study (Mertolenga and Alentejana; with the mean weight of adult cows close to 400 kg and 600 kg, respectively), considering an approximate ground contact area of about 0.01 m
2 per hoof [
8,
11], the static pressure exerted by the animals at each point of contact in grazing is approximately 100 to 150 kPa. These dynamic stresses can be significantly enhanced during the movement of the cow, when not all hooves are in contact with the soil surface [
8,
12]. Grazing animals can exert downward pressures on the soil surface similar or greater than those of heavy mechanical equipment [
1,
8,
12,
13]; therefore, this concern is understandable [
1]. Soil compaction is considered, in general, a determinant factor of crop productivity [
14], known and accepted as the factor that most negatively alters soil structure [
7,
15]. The hoof impact of livestock tends to cause the collapse of the larger soil pores, thus forming more small pores, increasing soil bulk density and soil penetration resistance, favouring soil compaction and, consequently, hindering the regrowth and renewal of the pasture and reducing productivity [
7]. For these reasons, soil compaction is associated with serious soil degradation processes which culminate in a decrease in the soil aeration and water infiltration rate, and cause waterlogging, leading to runoff [
1,
14,
15,
16]. This process has a negative impact on the soil’s productive potential [
17]. Soil type, soil moisture content and grazing management (e.g., stocking rate, stocking density or timing) are some of the factors that can accentuate the compaction resulting from animal trampling [
2,
7]. It is known that this risk is highest when the soil moisture content tends to increase [
12,
13]. Consequently, the autumn–winter and spring seasons, when practically all precipitation is concentrated, are the periods of greatest soil compaction vulnerability.
The degree of compaction of the sub superficial layers of the soil can be measured through soil penetration resistance, or the resistance of the soil against mechanical penetration (Cone Index, CI, in kPa), which consists of quantifying the resistance observed against the penetration of a body of a certain shape, usually a cone [
18,
19]. The field penetrometer is a rapid and easy-to-use tool when compared to the more conventional soil determinations, such as soil bulk density [
19]. The CI, utilised to quantify the mechanical impedance of the soil, is considered one of the key indicators for the diagnosis of the most restrictive soil layers for root growth at depth [
19]. Such evaluations offer essential information about the ease or difficulty of the growth of crop root systems [
18]. According to Donkor et al. [
13], Krajco [
16] and Debiasi et al. [
20], if the CI is higher than 2 MPa, this may lead to restrictions on root penetration and growth. However, measurements of the CI values are highly influenced by diverse soil factors: intrinsic (e.g., soil moisture, bulk density, texture and structure) and extrinsic (e.g., management system) [
19]. Moreover, the results of field penetrometers depend on user operating speed (penetration rate), which is often challenging to standardise; a change in operating speed alters the force the users apply to insert the equipment rod, which, in turn, changes the result [
15,
18]. On the other hand, the characterisation of this and other soil properties is a difficult process due to the high soil spatial variability [
14] and the interaction and combination of the factors involved, particularly in silvopastoral systems [
1]. The soil’s superficial micro-variability is mainly controlled by soil and crop management practices, plant roots, wet/dry cycles and, in non-tillage systems, by surface-sealing processes [
19].
In this context of high soil spatial variability, it is essential for management to take advantage of the technological developments associated with Precision Agriculture (PA) [
21,
22]). The objectives of PA are to optimise production by increasing yield or reducing costs, minimise the use of natural resources, reduce the environmental impact and improve soil quality [
14]. To achieve these goals, many new technologies have been developed and used for sensing and mapping crops and soils [
14]. Thus, the use of new technologies for the correct management of farms is important to prevent the degradation of new areas, since the use of pastures is a practical alternative for feeding ruminants and, concomitantly, for producing meat and/or milk [
7]. One of the most widely used parameters for the management of soil spatial variability is the mapping of apparent soil electrical conductivity (EC
a), which allows the farmer to identify differentiated management zones (e.g., for differential fertiliser application, soil amendment or irrigation) [
22,
23]. The EC
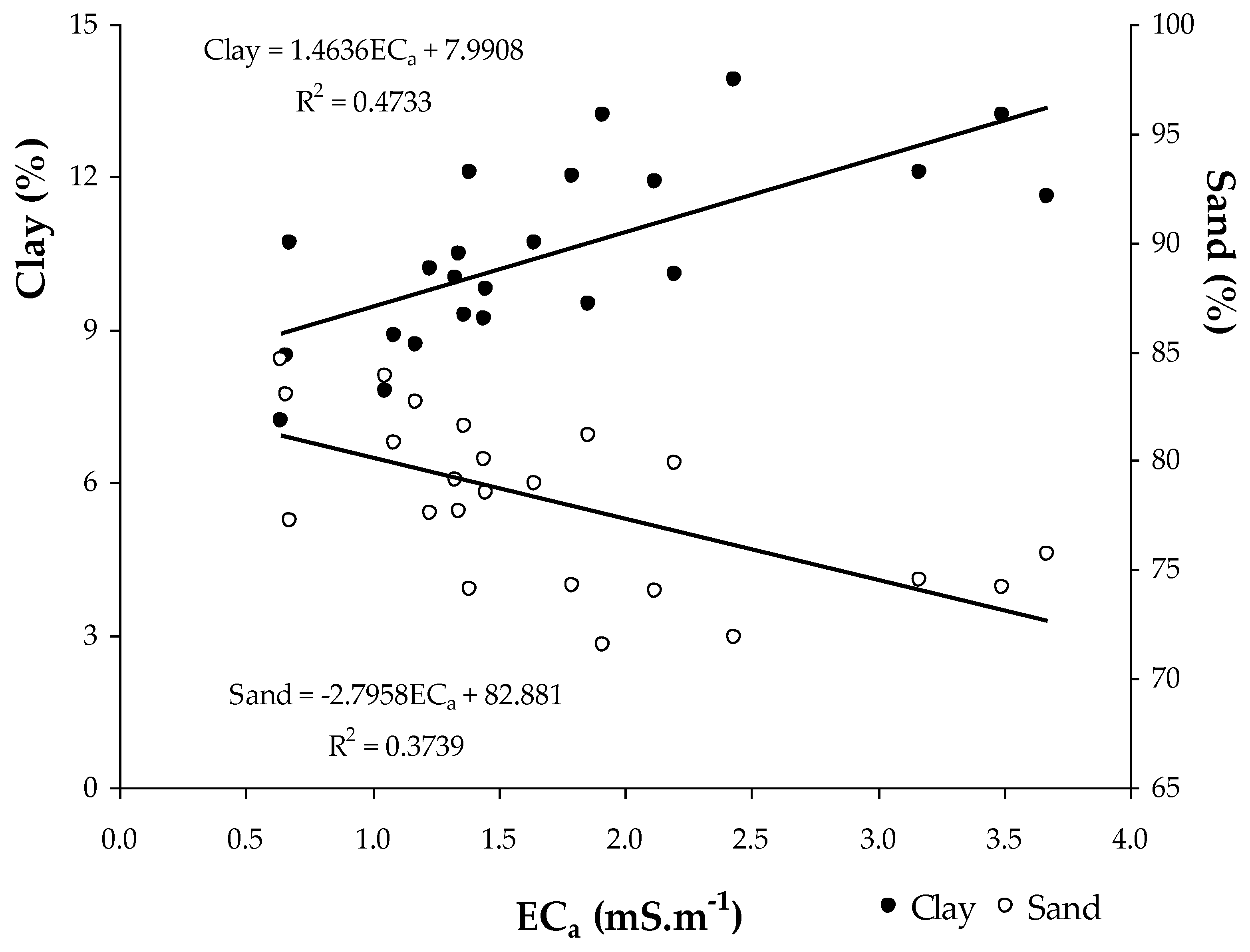
a is defined as the soil’s capacity to conduct electric currents, which is influenced by many physical-chemical features of the soil, including the clay content [
14,
24,
25]. The temporal stability of this parameter has allowed the recognition of the geospatial measurements of EC
a as a valuable mapping tool that indicates the soil’s potential productivity [
14,
26]). Simultaneously, the measurement of the EC
a can be considered a relatively inexpensive, easy and fast technique with the potential to contribute to the identification and prediction of spatial variability of soil compaction [
14,
16]. However, in the recent literature, there is a lack of scientific papers regarding the relationship between these two parameters [
14].
Other technologies that can be very useful for monitoring animal trampling are Global Positioning Systems (GPS collars). These collars have several applications in PA; for example, they can be used to monitor preferred grazing areas [
27]. The geolocation of animals by remote sensing (RS) from satellites, at regular time intervals, allows the identification of grazing patterns and areas of higher grazing intensity throughout the vegetative cycle of the pasture [
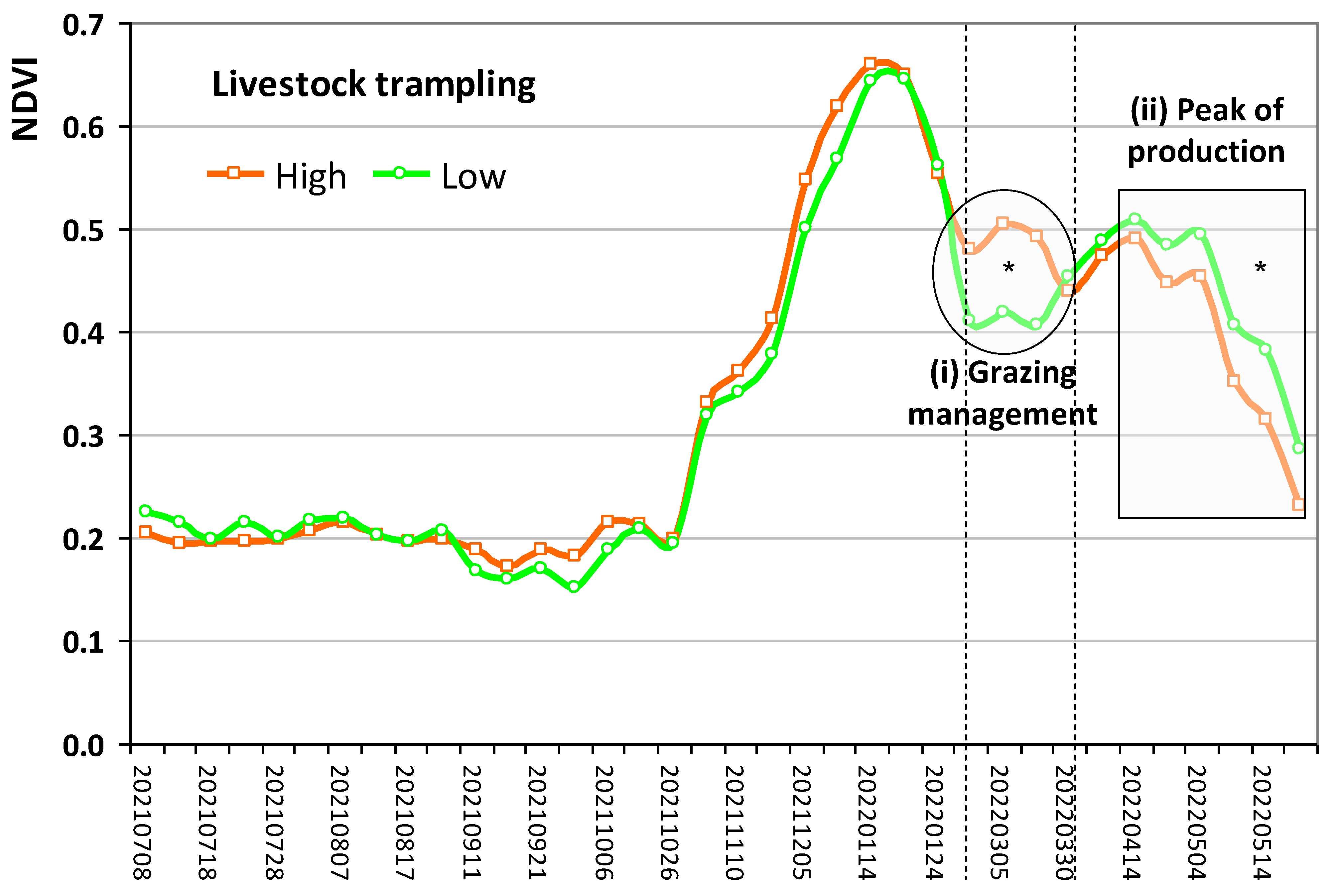
27]. These preferential grazing areas are potentially at greater risk of compaction by animal trampling, especially in periods of higher precipitation, such as winter or spring in regions with a Mediterranean climate. The use of RS imagery based on the Sentinel-2 satellite to obtain vegetation indices, namely the Normalised Difference Vegetation Index (NDVI), also proved a promising tool to express the response pattern of pastures’ vegetative vigour [
7,
28,
29,
30]. Therefore, with the vegetation indices that can be obtained from digital images and are sensitive to changes in the vegetation cover of pastures, before and after grazing, it is possible to monitor and to identify degraded areas with overgrazing, as well as areas that are arid or without vegetation, for example, in large or small fields and at different time scales [
7].
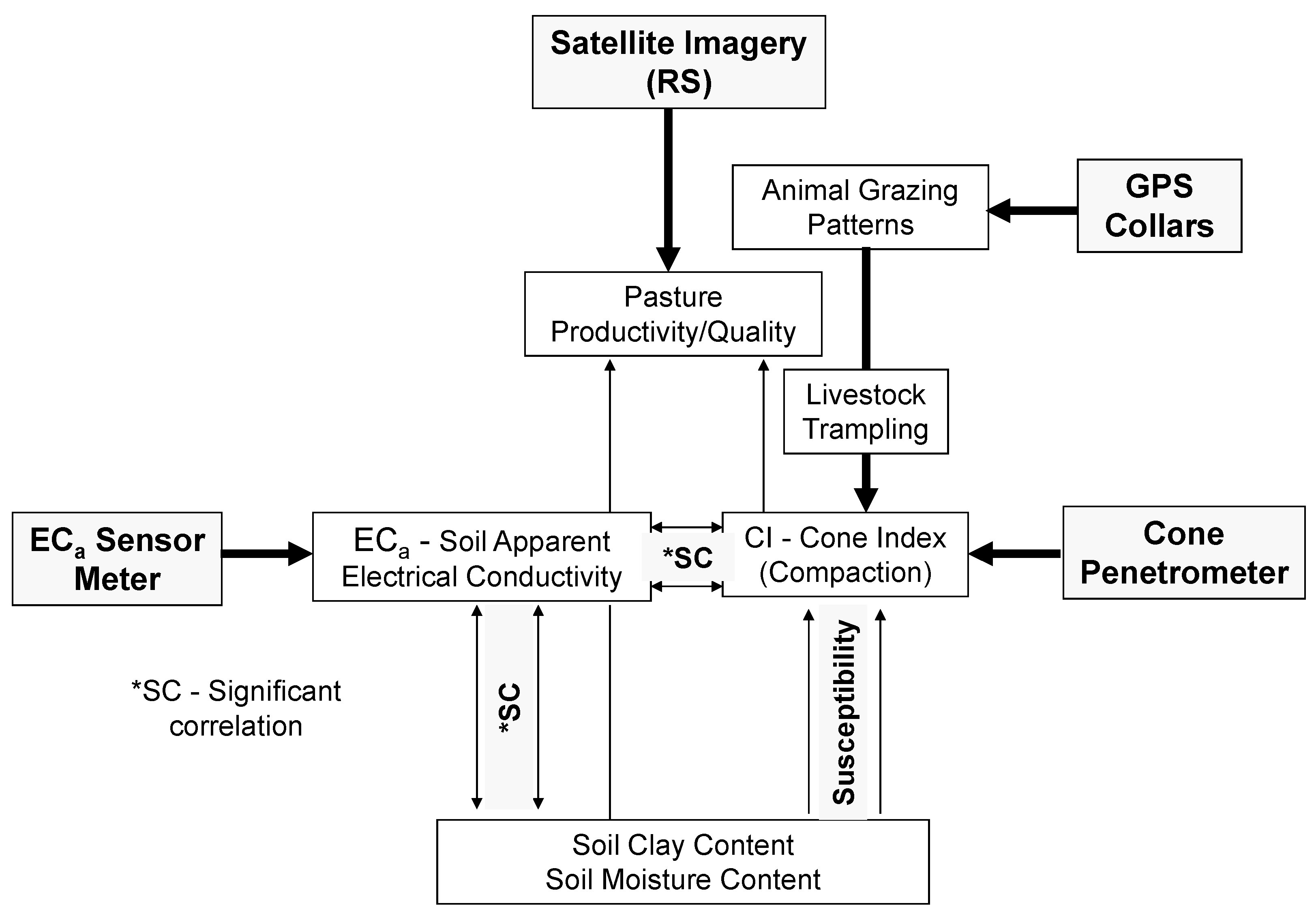
This study aims: (i) to assess the spatial variation in the compaction profile of the 0–0.30 m soil layer over several years; (ii) to evaluate the effect of animal trampling on soil compaction; and (iii) to demonstrate the interest of combining various technological tools for sensing and mapping indicators of soil characteristics (CI and ECa), of pastures’ vegetative vigour (NDVI) and of cows’ grazing zones (GPS collars).
2. Materials and Methods
2.1. Site Description, Field Management and Sampling Scheme
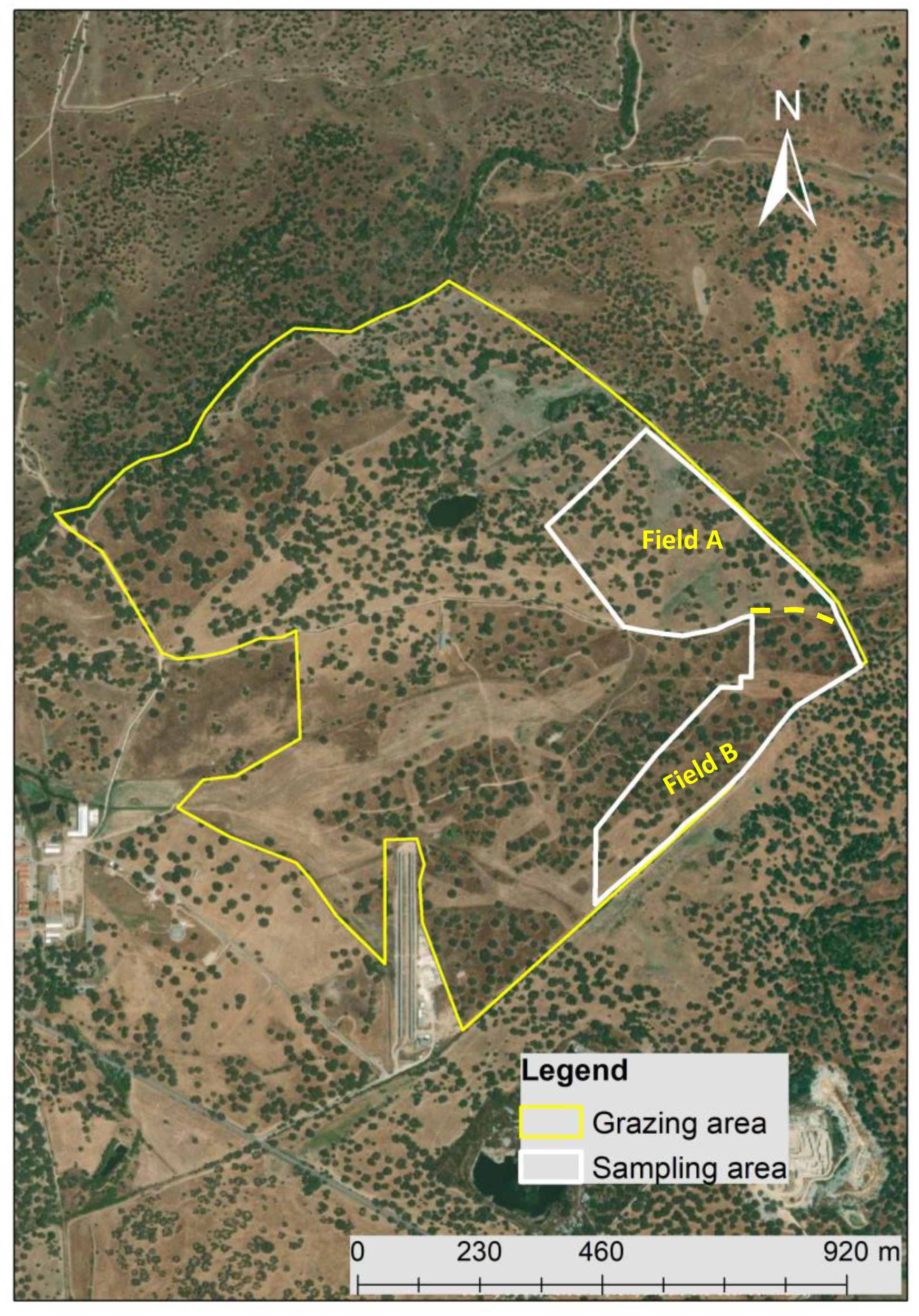
The field of the study (
Figure 1) is located at the Mitra experimental farm of the University of Évora in the southern region of Portugal (coordinates 38°32′10″N; 7°59′80″W). This field of
Quercus ilex ssp.
rotundifolia Lam. and bio-diverse pastures has been used for extensive and rotational grazing of 60 adult cows of two native breeds (“Alentejana”—25 animals; and “Mertolenga”—35 animals) [
5]. Of the total grazing area (about 100 ha), 20 ha were monitored (11 ha in “Field A” and 9 ha in “Field B”). Grazing was conducted to have a mean stocking rate of about of 0.6 head.ha
−1 in both fields (A and B) between October and December. In January and February and between April and June, no animals graze in “Field B”, while in March, no animals graze in “Field A”. More details of this grazing management system can be consulted in Serrano et al. [
5].
The dominant soil type of this field is acidic and a not very fertile Cambisol [
31], mainly used for mixed agrosilvopastoral systems.
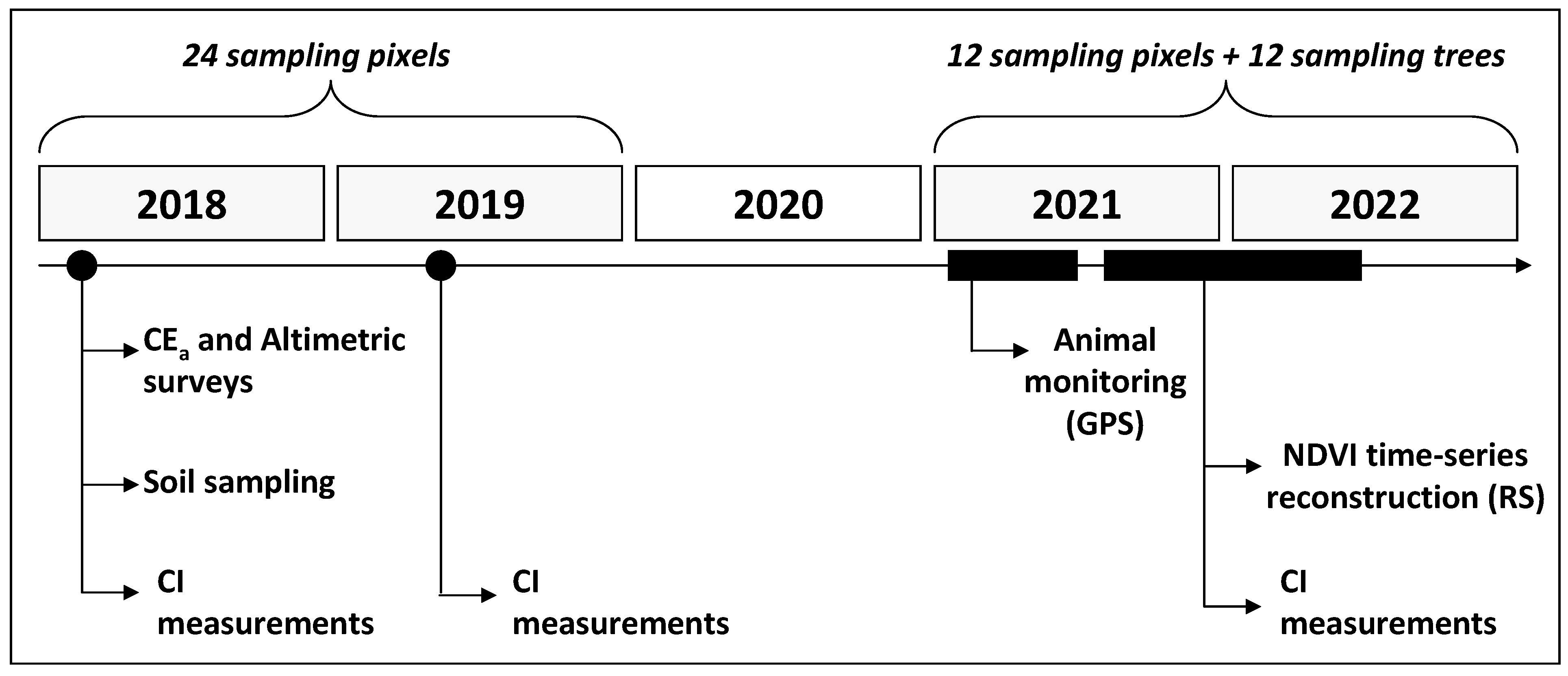
The chronology of the measurements carried out in the experimental field is presented in
Figure 2. In April 2018, the EC
a and altimetric surveys, as well as soil sampling and CI measurements, were carried out. The CI measurements were carried out again in March 2019, September, November and December 2021 and March 2022. Animal monitoring was carried out between January and May 2021. Vegetation Index (NDVI) time series reconstruction was performed throughout the 2021/2022 pasture vegetative cycle (between September 2021 and June 2022).
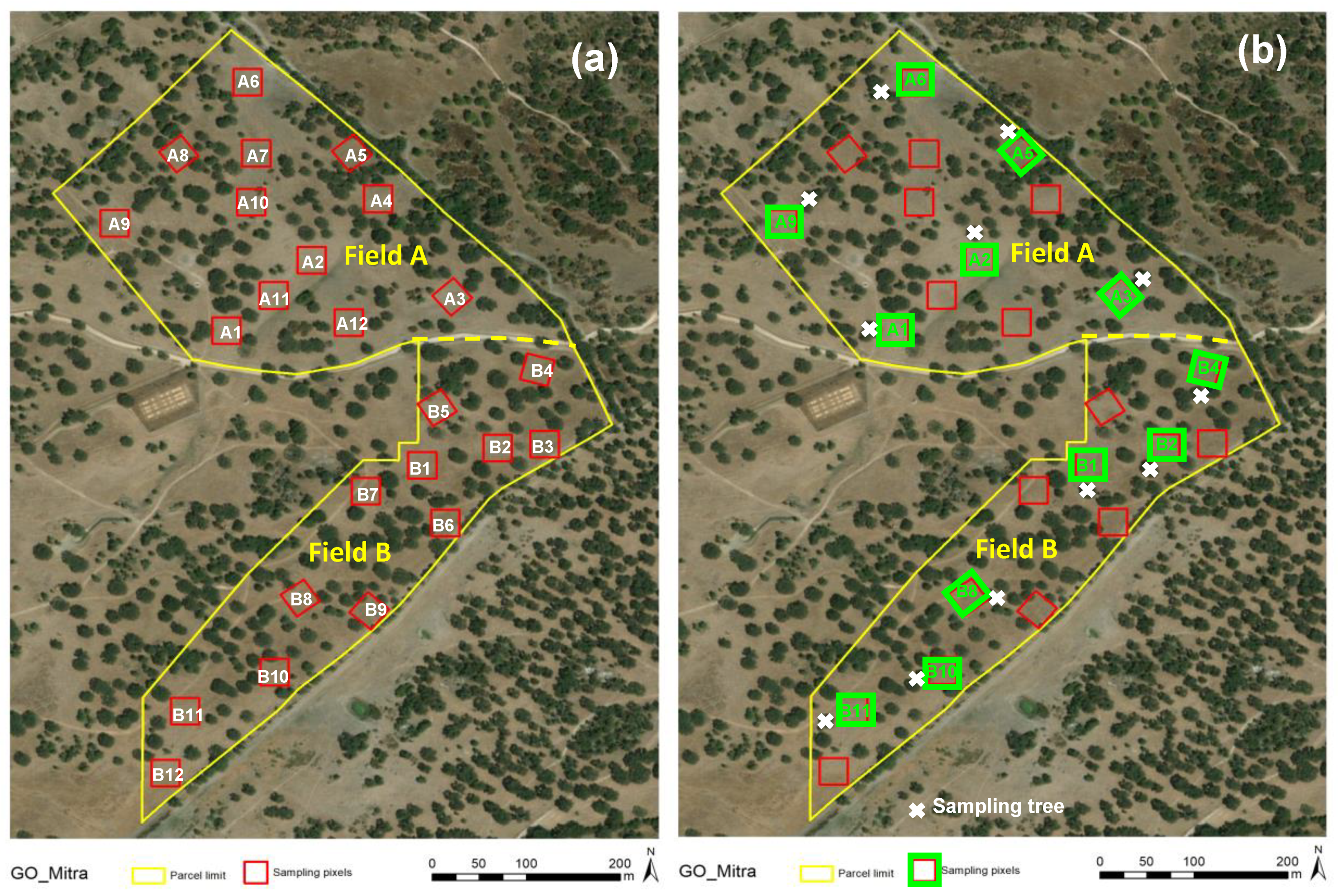
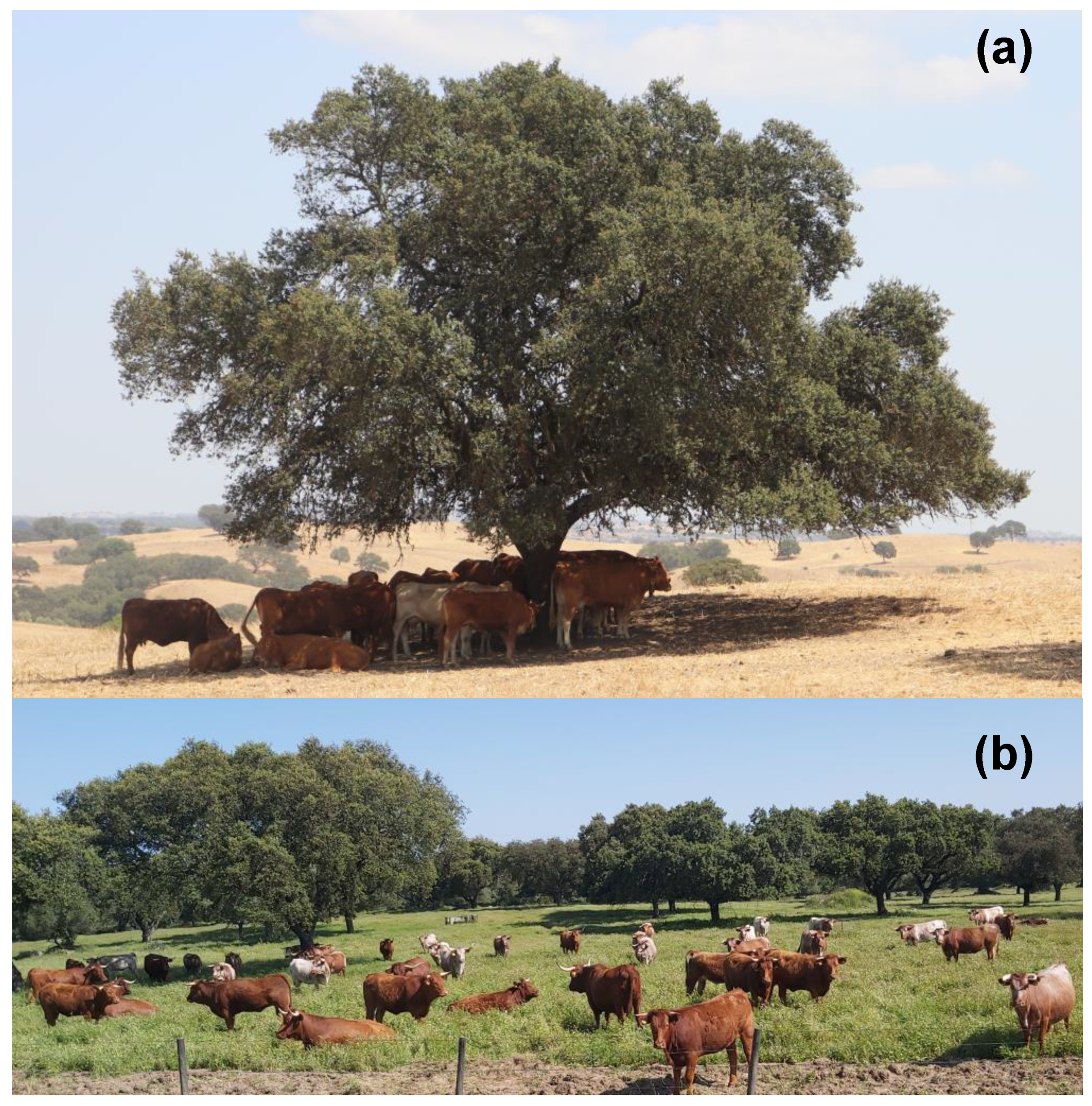
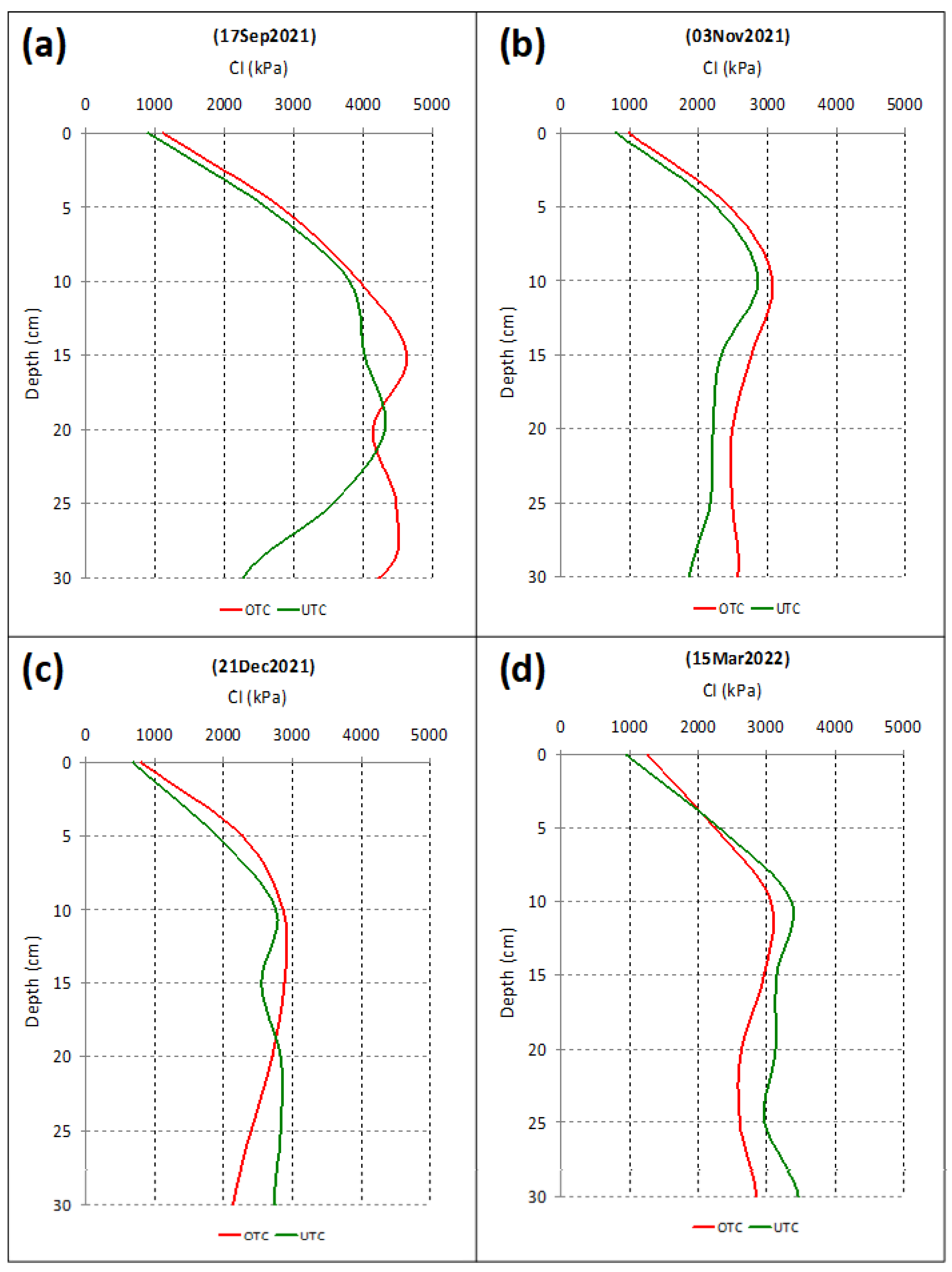
The monitoring area (“Field A” + “Field B”) was sampled in two phases: the first in 2018–2019 and the second in 2021–2022. In the first phase, 24 Sentinel-2 pixels “10 m × 10 m” were georeferenced for sampling in areas without trees (outside the tree canopy, OTC;
Figure 3a), with 12 in each field (A and B). In the second phase, half of these areas was sampled (12 sampling pixels, 6 in each field, A and B), as well as the area under the tree canopy (UTC) closest to each of these pixels (12 sampling trees;
Figure 3b).
2.2. Characterisation of the Climate
The climate of this Mediterranean region is classified as Csa (Köppen–Geiger classification) [
32]. It is characterised by high inter-annual irregularity and low rainfall (<600 mm) that is more frequent in the autumn–winter period and practically nil in the summer [
33].
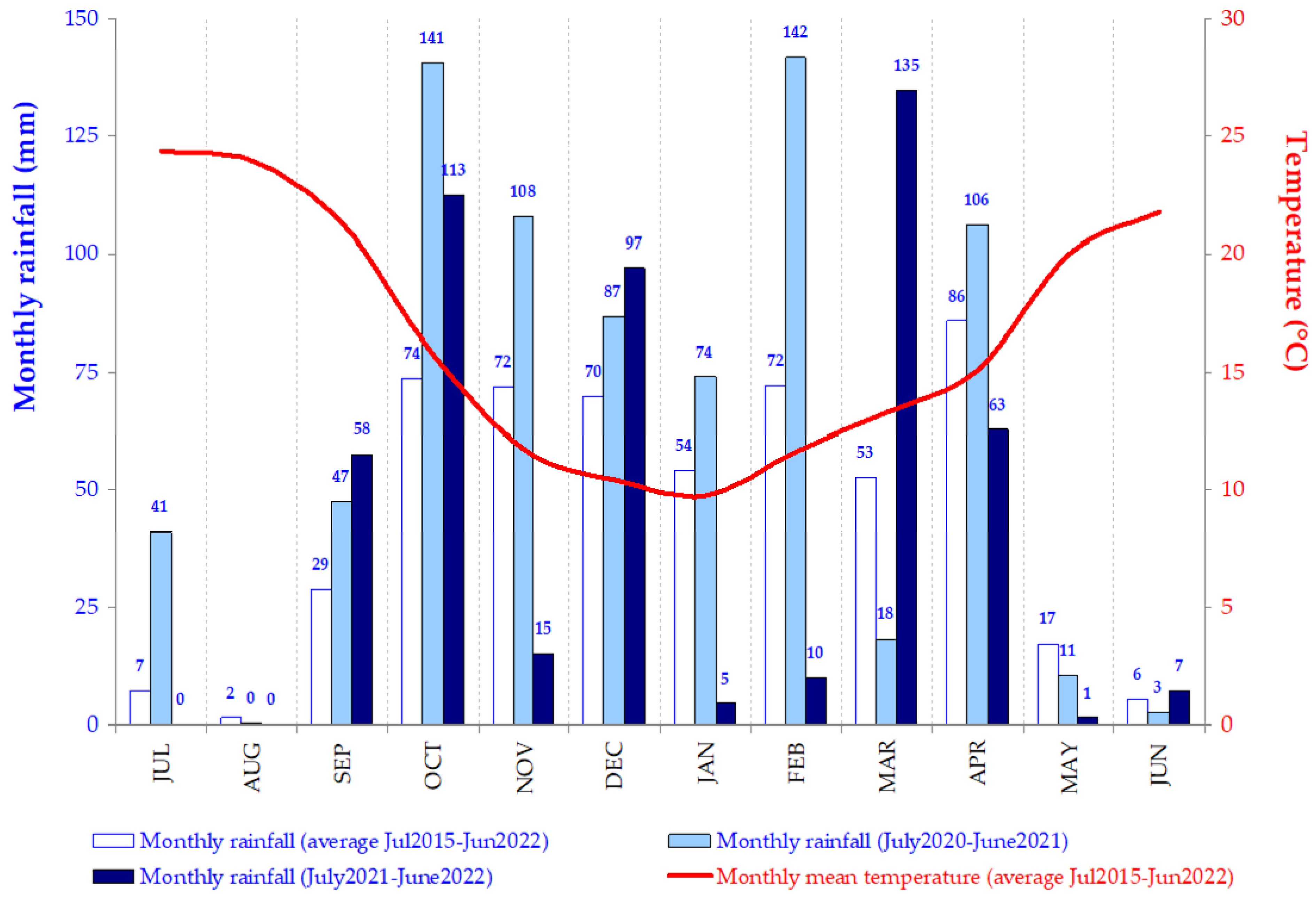
The thermopluviometric diagram of the Évora meteorological station between July 2015 and June 2022 is presented in
Figure 4. This also shows the monthly rainfall between July 2020 and June 2021 and between July 2021 and June 2022. The great irregularity of the rainfall distribution is evident: for example, 2020/2021 shows high accumulated rainfall in February (142 mm), October (141 mm), November (108 mm) and April (106 mm) and very low rainfall in March (18 mm), while 2021/2022 shows high accumulated rainfall in March (135 mm), October (113 mm) and December (97 mm) and very low rainfall in January (5 mm), February (10 mm) and November (15 mm). This irregularity and, especially, the occurrence of events with a high concentration of rainfall, associated with poorly drained soils, can lead to situations of flooding and, consequently, potentiate soil compaction by animal trampling.
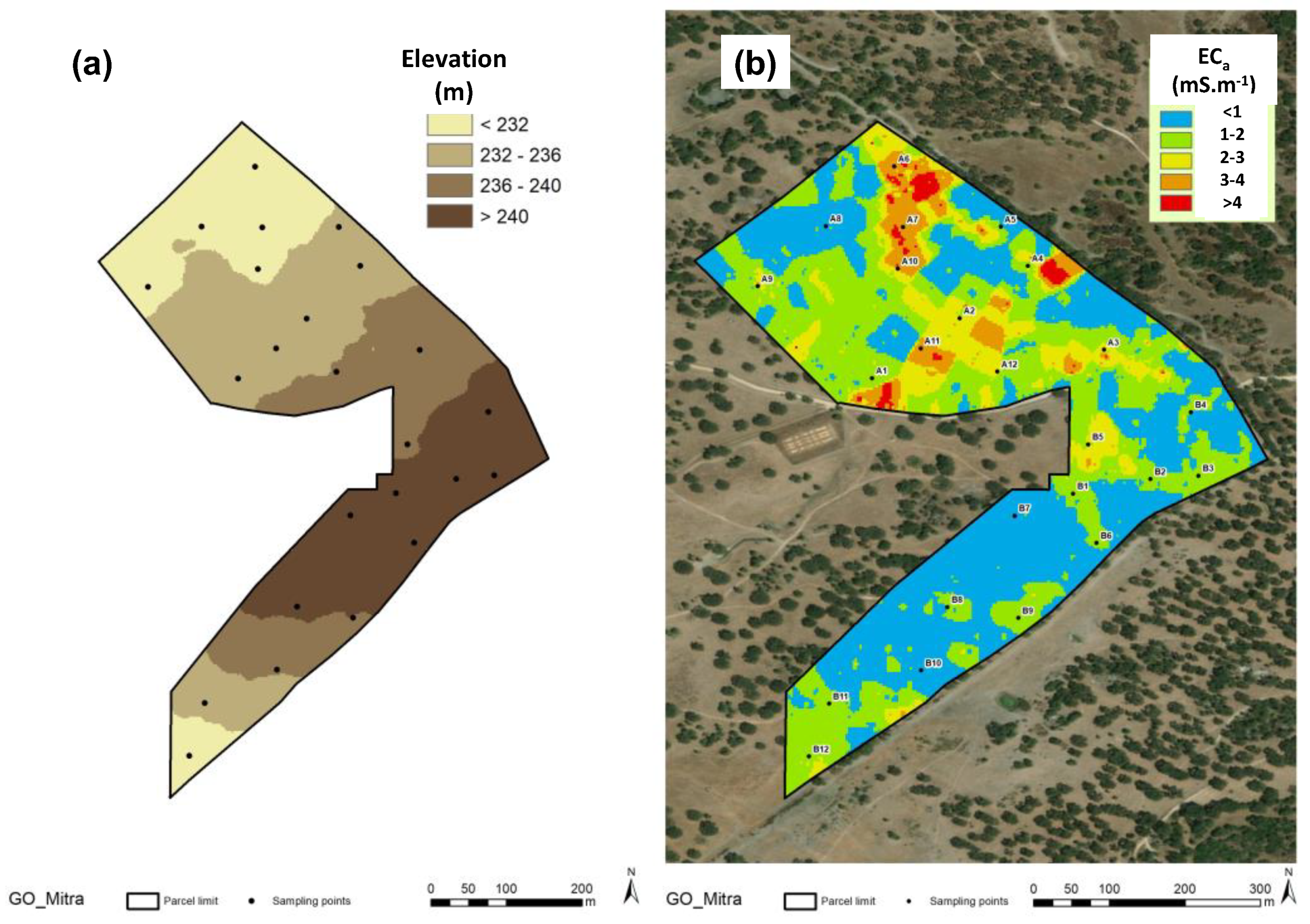
2.3. Soil Apparent Electrical Conductivity (ECa) and Altimetric Surveys
With the aim of measuring ECa, a contact-type sensor (Veris Technologies, Salina, KS, USA) was utilised. Measurements at a depth of 0–0.30 m were performed in April 2018. An all-terrain vehicle was used to pull the sensor. The average speed of the vehicle was 2.0 m s−1; consecutive passages, spaced 10 m, were made across the field. The spatial resolution of the ECa measurements was a 2 by 10 m grid, since a measurement was taken every second. A global navigation satellite system (GNSS) antenna was installed near the sensor. The obtained data were used to produce the ECa map with the ArcMap module of ArcGIS 9.3 software (v10.5, ESRI, Inc., Redlands, CA, USA), after conducting a geostatistical analysis with the extension Geostatistical Analyst.
The data of the GNSS antenna were used to create the digital surface elevation model (elevation map) using the linear interpolation TIN tool from ArcGIS 9.3 and converted to a grid surface with a 1 m grid resolution.
2.4. Soil Sampling and Laboratory Reference Analysis
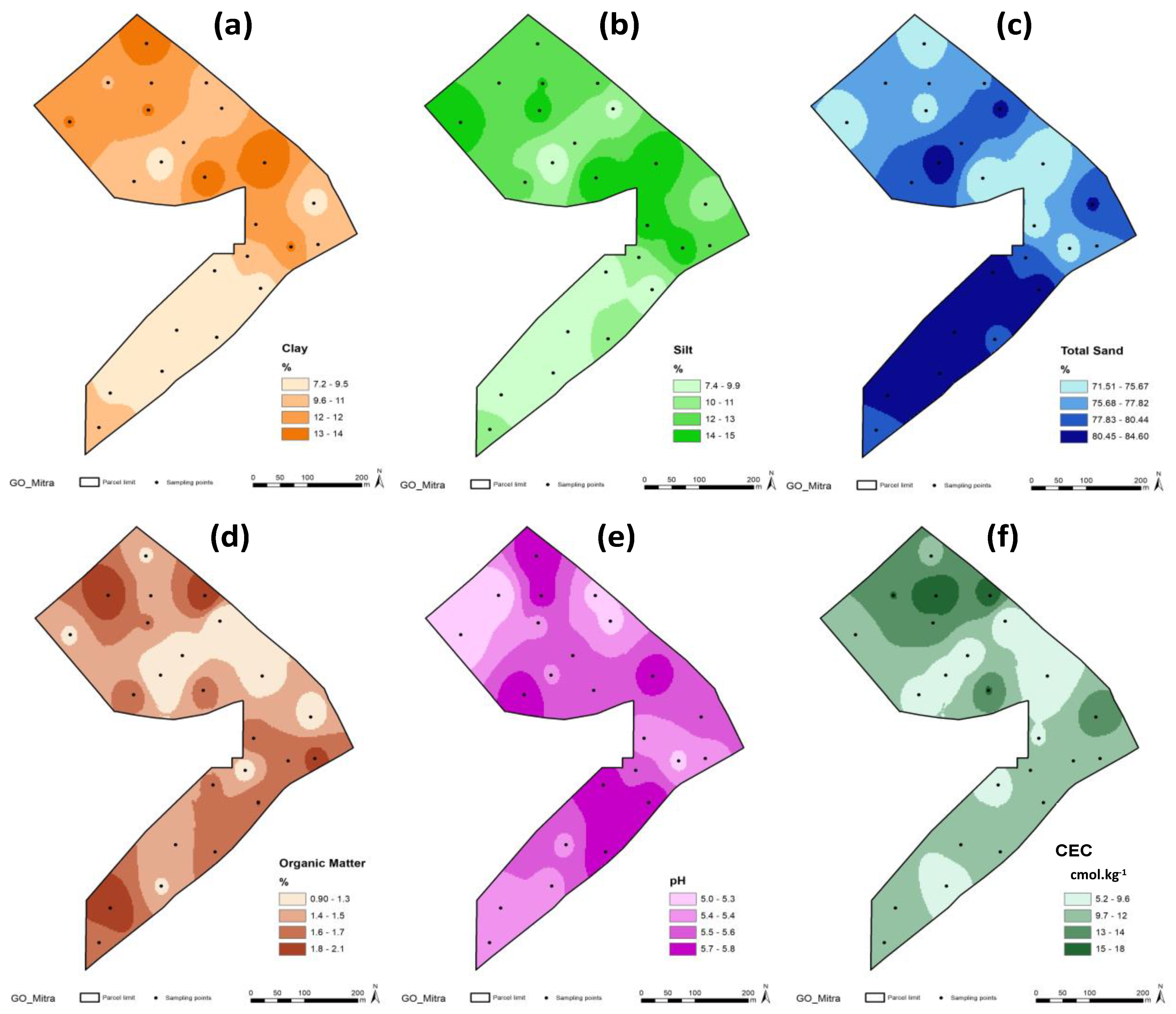
In the 24 sampling areas (Sentinel-2 pixels;
Figure 3a), after measuring EC
a, composite soil samples (comprised of five subsamples) were collected at a depth of 0–0.30 m. These soil samples were analysed for moisture content (SMC), particle size distribution (texture: sand, silt and clay content), pH, organic matter (OM) and cationic exchange capacity (CEC). The standard processes used in the laboratory were described in detail by Serrano et al. [
5,
6]. All maps of the soil parameters were produced after conducting a geostatistical analysis with ArcGIS using a 1 m grid resolution. Was used the inverse distance weighting (IDW) interpolation of the georeferenced data.
2.5. Cone Index Measurements
An electronic cone penetrometer “FieldScout SC 900” (Spectrum Technologies, Aurora, IL, USA) was used to measure the soil resistance to penetration (Cone Index, CI, in kPa) [
15]. The main rules for the determination of CI values are standardised by the American Society of Agricultural and Biological Engineers (ASABE; EP542 and S313.3) [
15].
In each sampling point, five CI measurements were carried out between 0-0.45 m (maximum depth allowed by the device), one in the central point of the sampling area, and one in each of its four quadrants. As suggested in other works [
15], to minimise possible errors resulting from the uncertainty of maintaining a constant penetration rate during the determination, measurements were always carried out by the same experienced operator. When the insertion speed changes, the equipment registers an error, and the measurement is repeated. CI measurements were carried out in the 24 pixels in April 2018 and March 2019 (
Figure 3a), and in the 12 OTC pixels and the 12 UTC areas, in September, November and December 2021 and March 2022 (
Figure 3b).
After the field measurements, data processing was carried out. A preliminary analysis was conducted to remove outliers from the data set. This procedure is fundamental, since the CI is measured using portable penetrometers, with manual operation, and the roughness of the soil surface and the variation in the speed of the rod going into the soil profile can influence the results [
19]. The inconsistent and unreliable readings that may occur near the soil surface due the unevenness of the soil surface, led us not to consider the readings obtained in each point at 0 m depth, an aspect also suggested by Mayerfeld et al. [
2]. The mean CI value of the set of five measurements was calculated for each sampling area and each depth of determination.
Taking into account, on the one hand, the recommendations of Mayerfeld et al. [
2] that soil compaction investigations in silvopastures should extend to at least a depth of 0.30 m and, on the other hand, of Pentos et al. [
14] that soil compaction measured in deeper soil layers is of no practical relevance because of limitations in rooting depth, in this study, the mean CI of 0–0.10 m, 0.10–0.20 m, 0.20–0.30 m and 0–0.30 m was calculated. In shallow soils, as is the case for soils typical of the Montado ecosystem [
33,
34], measurements below 0.30–0.35 m may be in contact with the bedrock, as reported by Mayerfeld et al. [
2].
2.6. Animal Tracking with GPS Collars and Data Analysis
To monitor the grazing patterns, five randomly selected cows were fitted with GNSS (Global Navigation Satellite System) position loggers (“Digitanimal”, Madrid, Spain). The tracking system consisted of a GNSS unit, a lithium battery pack, a PVC enclosure resistant to water and dust and a communication module (GPS collars) [
35]. A total of four loggers were programmed to collect geolocation data every thirty minutes between 1 January and 17 March 2021, and the fifth receiver was programmed to collect geolocation data every five minutes between 6 and 19 May 2021. Data were transmitted over the “Sigfox”, a global network dedicated to the internet of things featuring low power, a long range, and small data. The devices, weighing 265 g, were adjusted to the neck of the animals using a stripe with a buckle, without affecting the animals’ movements.
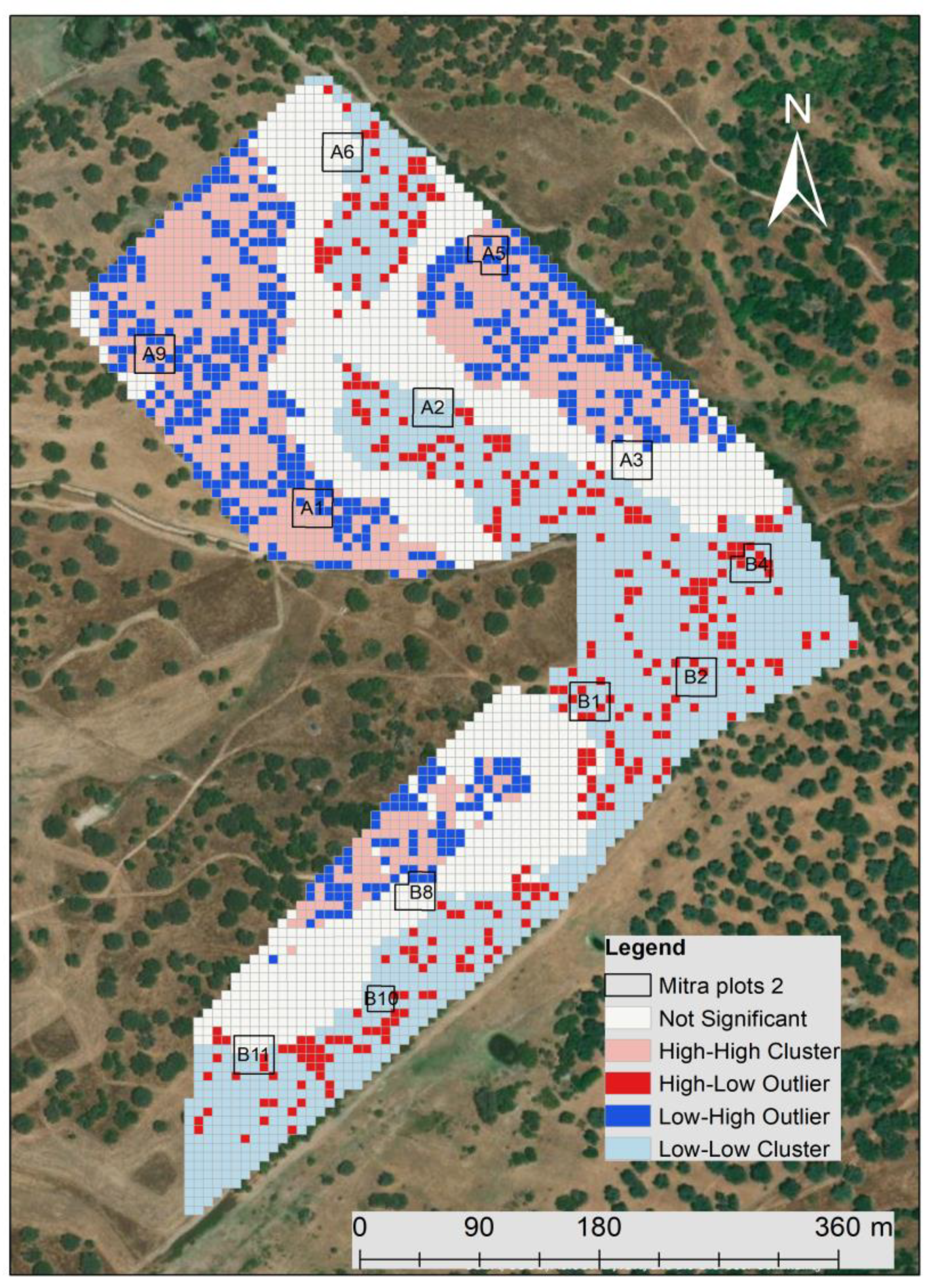
Figure 5 shows two patterns of animal behaviour throughout the year in the Montado ecosystem: UTC at peak summer sunshine hours (a) and in preferential grazing areas in other seasons (b).
The geostatistical analyses of the GPS collars were carried out with the ArcGIS Desktop software (v10.5, ESRI, Inc., Redlands, CA, USA). The “Optimised Outlier Analysis (Spatial Statistics)” algorithm, based on incident points, obtained by the GPS collars, creates a map of statistically significant hot spots, cold spots and spatial outliers using the “Anselin Local Moran’s I statistic”. This map, with s 5 m spatial resolution, includes 5 classes (“Not significant”, “High-High cluster”, “High-Low outlier”, “Low-High outlier”, and “Low-Low cluster”) and serves to characterise the grazing density pattern. With this tool, statistically significant spatial clusters of high values (hot spots), low values (cold spots) and outliers were identified within the dataset. The characteristics of the input feature class of the data to establish settings that produce optimal clusters were evaluated, and, automatically, (i) incident data were aggregated, (ii) multiple test and spatial dependence were corrected and (iii) a proper scale of analysis was determined. When a high positive z-score for a given feature is obtained, the features of nearby areas have similar values. The “Output Feature Class” is “High-High” or, conversely, “Low-Low”, respectively, for a statistically significant cluster of high or low values. On the other hand, the “Output Feature Class” is “High-Low” or “Low-High”, respectively, when the feature has a high value and nearby areas have low values or, conversely, when the feature has a low value and nearby areas have high values.
2.7. Vegetation Multispectral Measurement and NDVI Time Series Reconstruction
For this study, a multi-temporal Sentinel-2 imagery data set, free of clouds and atmospherically corrected, was downloaded from the Copernicus data hub. Band 8 (B8; NIR; 842 nm) and band 4 (B4; RED; 665 nm), both with a 10 m spatial resolution, were used to calculate the satellite vegetation index (NDVI; Equation (1)) and for the reconstruction of the mean NDVI trends (NDVI time series records). Values are the mean of the set of pixel sampling areas corresponding to “high livestock trampling” and of the set of pixel sampling areas corresponding to “low livestock trampling”.
2.8. Statistical Analysis
Descriptive statistical analysis was performed for all the evaluated soil parameters.
Regression analysis with a 95% significance level (p < 0.05) and the analysis of variance (ANOVA) of the data were carried out using IBM SPSS Statistics package for Windows (version 28.0, IBM Corp., Armonk, NY, USA). The multiple comparisons (Tukey’s HSD test) were applied for mean separation whenever the variables presented significant differences in the ANOVA. The specific analysis of the GPS collars and the determination of the NDVI from satellite image data were described above.


 ,
, 



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}