Low-Cost Piezoelectric Sensors for Time Domain Load Monitoring of Metallic Structures During Operational and Maintenance Processes

 , , , , and
, , , , and
Abstract
:1. Introduction
Electro-Mechanical Impedance Technique
2. Smart Sensors and Structures
2.1. Piezoelectric Sensors and Structural Materials
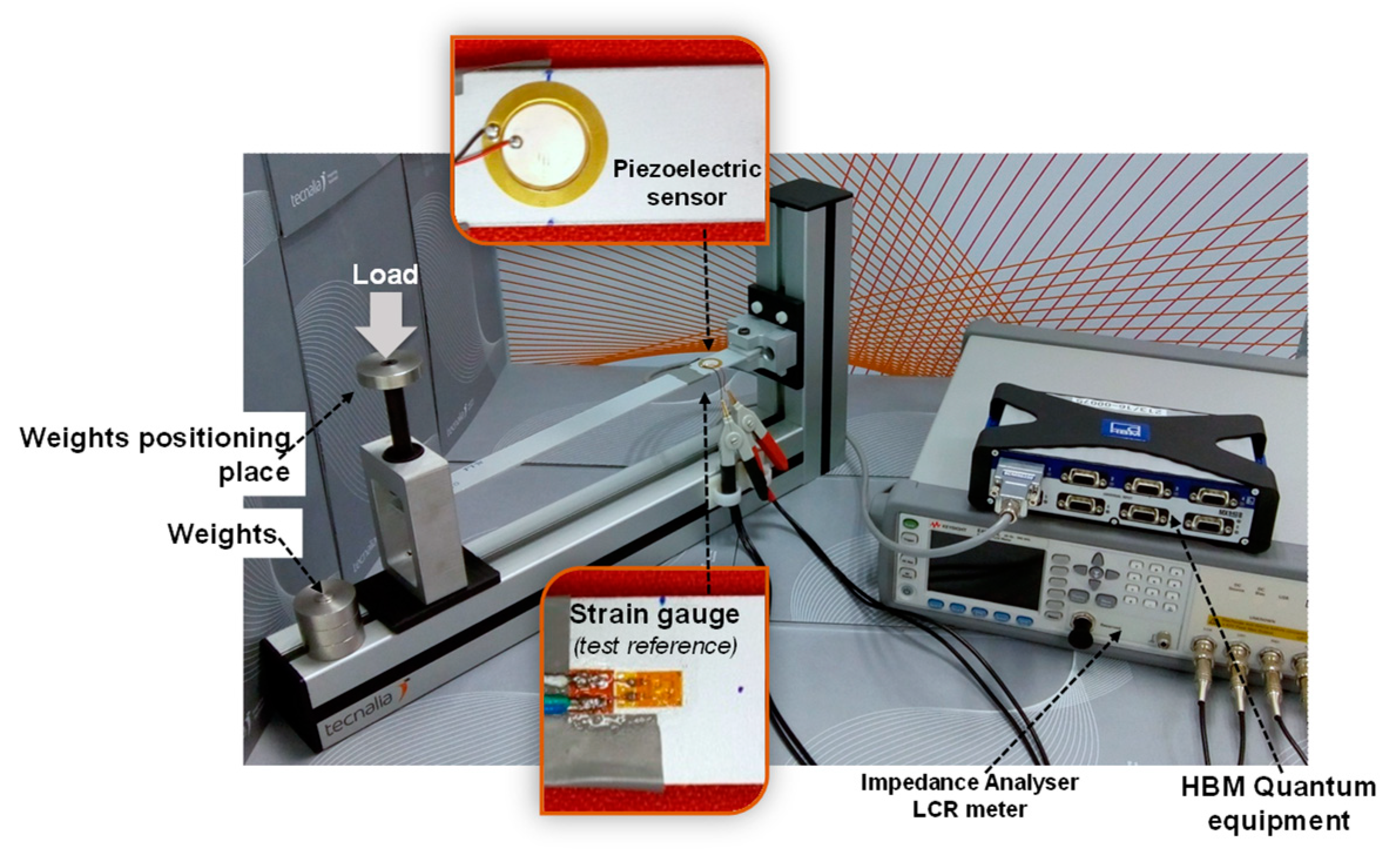
2.2. Monitoring and Measurement Procedure
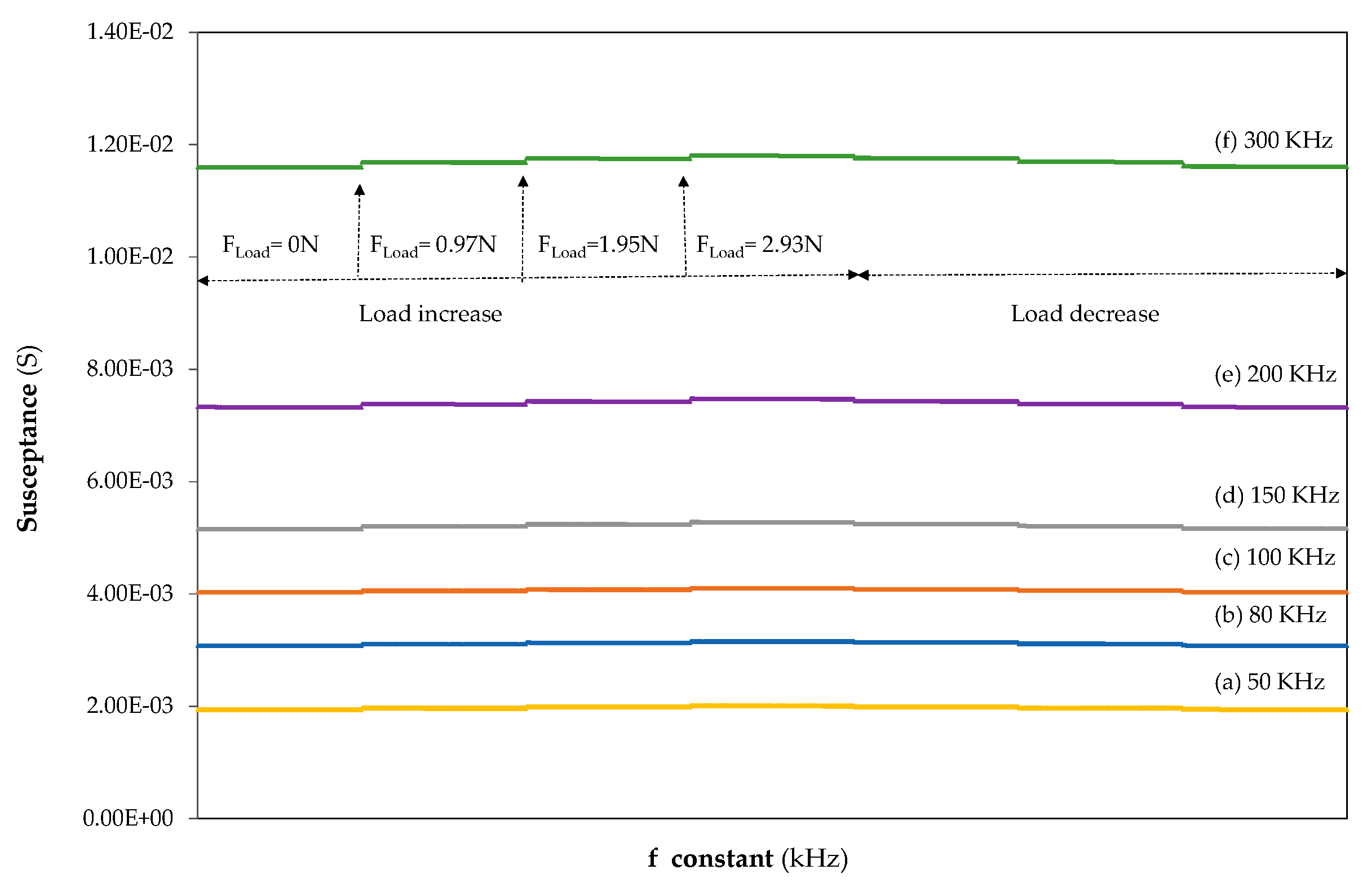
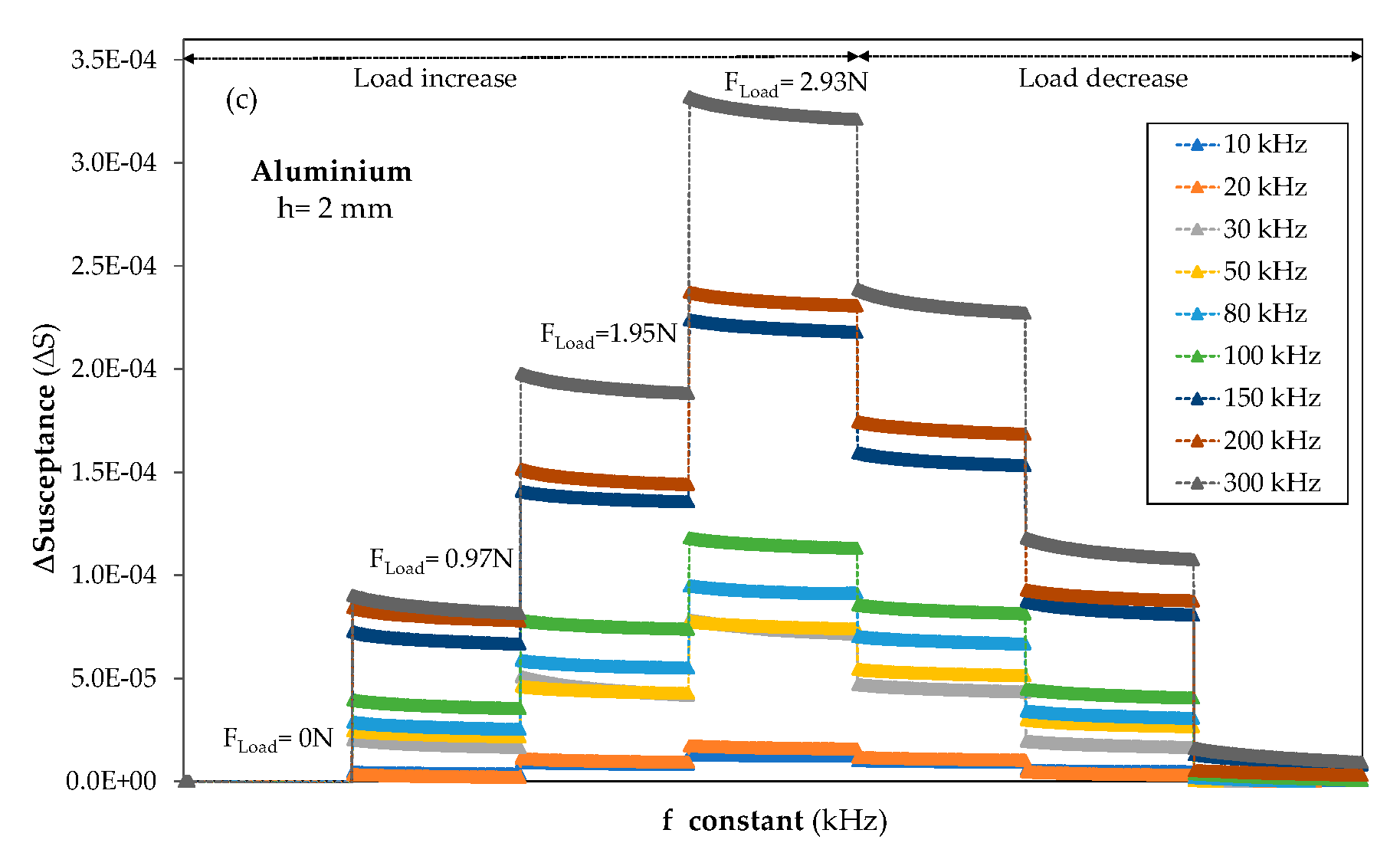
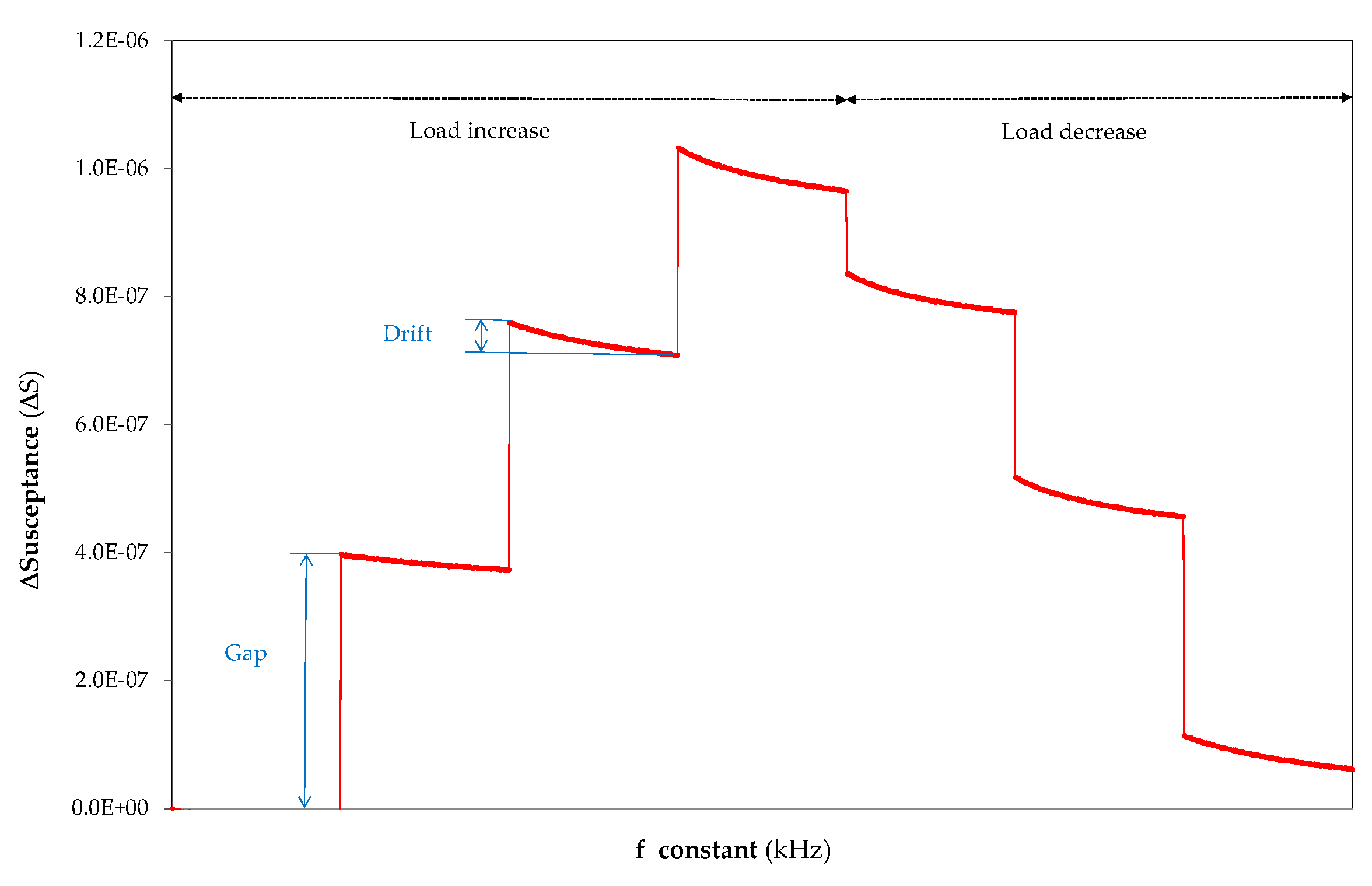
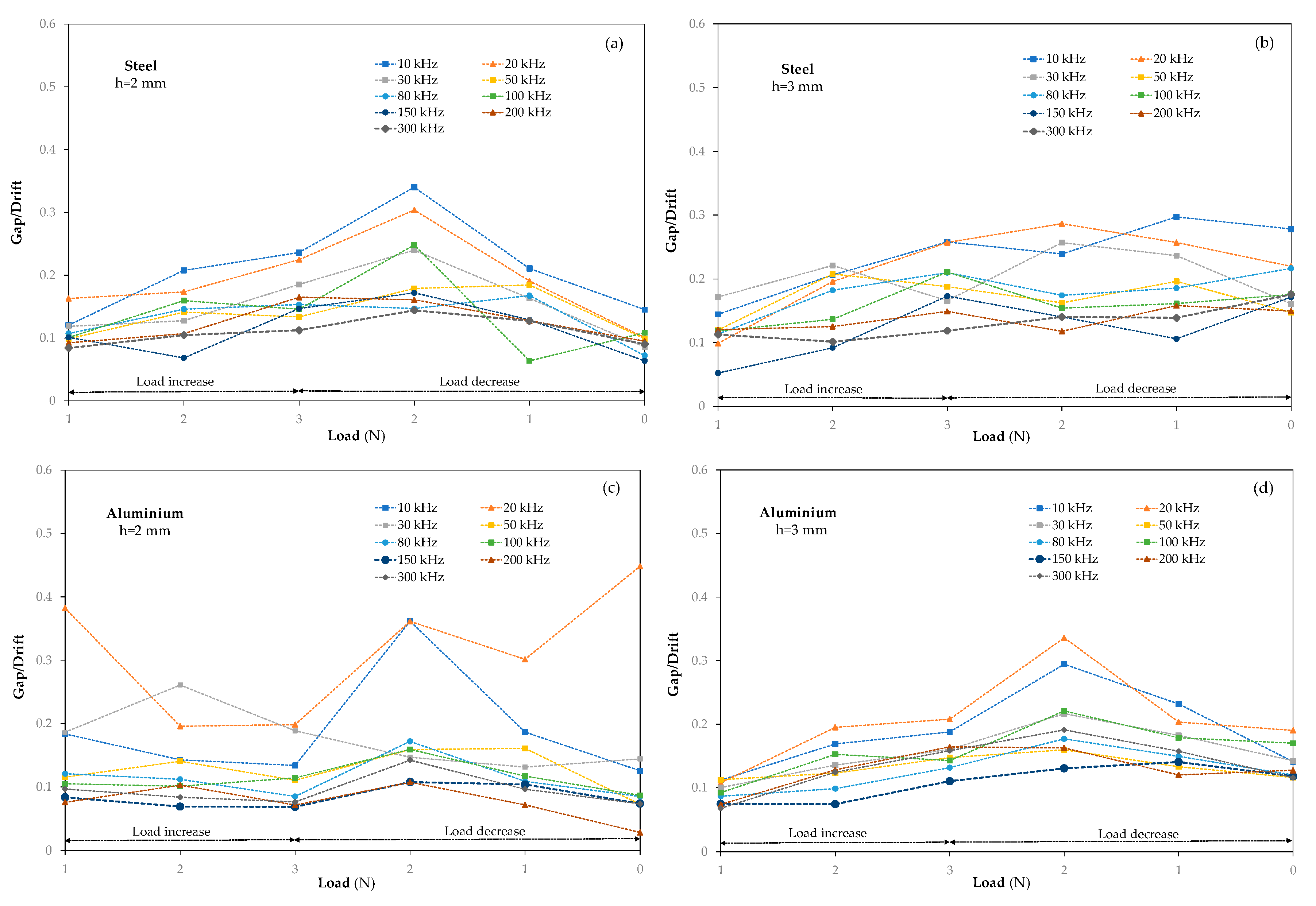
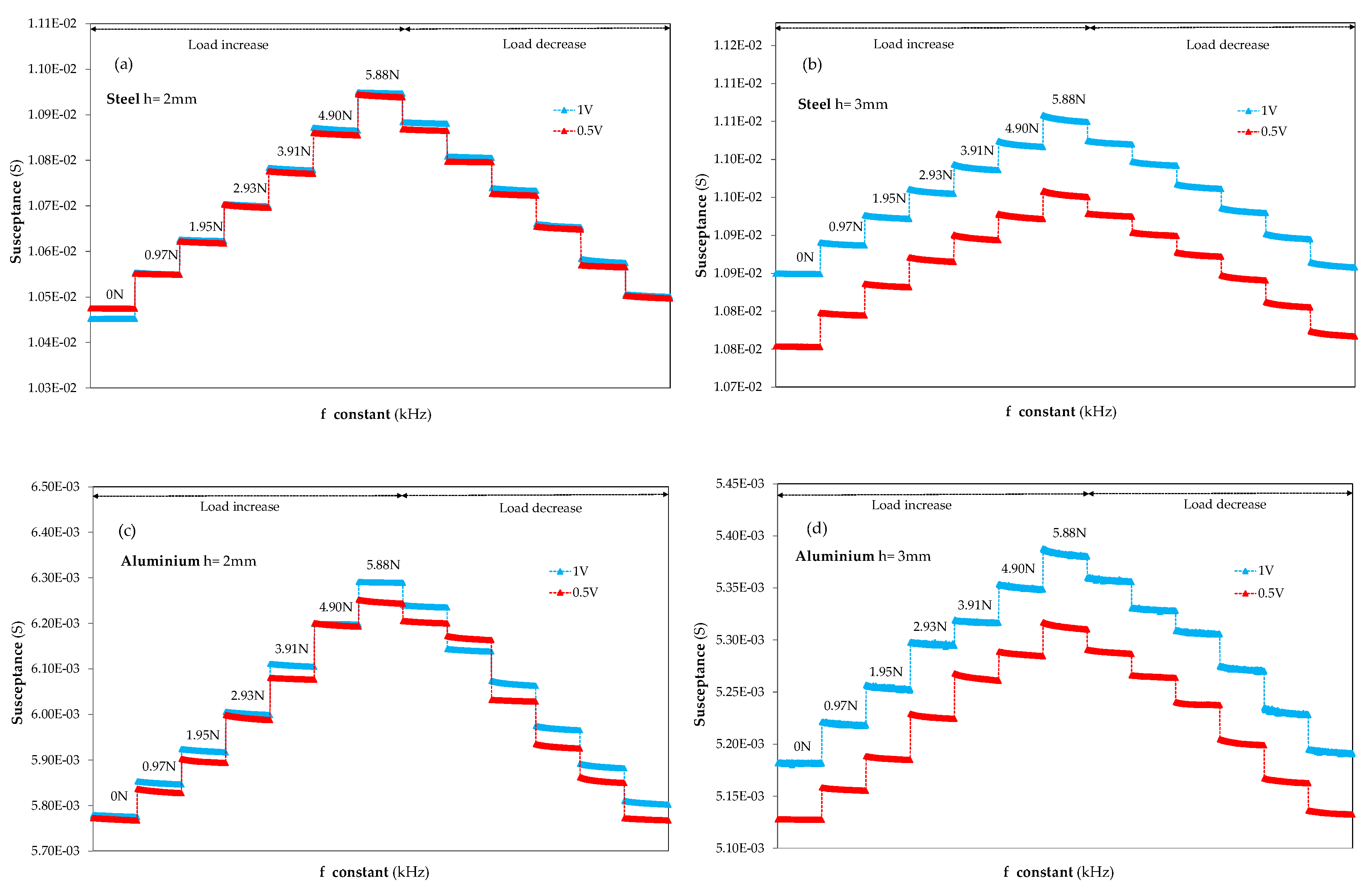
3. Results. Behaviour of Smart Planar Structures with Frequency in the Time Domain
4. Discussion
4.1. Frequency Selection
4.2. Voltage Selection
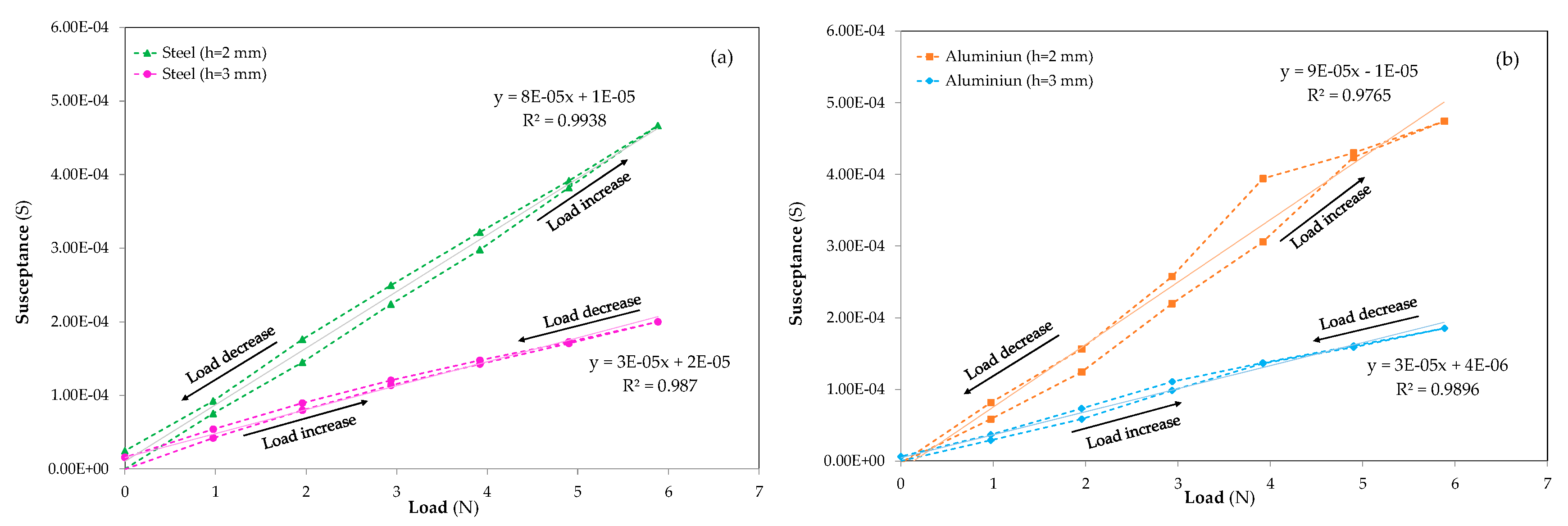
4.3. Load Calibration of the Piezoelectric Sensors
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Frank, A.G.; Dalenogare, L.S.; Ayala, N.F. Industry 4.0 technologies: Implementation patterns in manufacturing companied. Int. J. Prod. Econ. 2019, 210, 15–26. [Google Scholar]
- Zheng, P.; Wang, H.; Sang, Z.; Zhong, R.Y.; Liu, Y.; Liu, C.; Mubarok, K.; Yu, S.; Xu, X. Smart manufacturing systems for Industry 4.0: Conceptual framework, scenarios, and future perspectives. Front. Mech. Eng. 2018, 13, 137–150. [Google Scholar]
- Zhong, R.Y.; Xu, X.; Klotz, E.; Newman, S.T. Intelligent Manufacturing in the Context of Industry 4.0: A Review. Engineering 2017, 3, 616–630. [Google Scholar] [CrossRef]
- Wang, S.; Wan, J.; Zhang, D.; Li, D.; Zhang, C. Towards smart factory for industry 4.0: A self-organized multi-agent system with big data based feedback and coordination. Comput. Netw. 2016, 101, 158–168. [Google Scholar]
- Schuh, G.; Anderl, R.; Gausemeier, J.; ten Hompel, M.; Wahlster, W. Industrie 4.0 Maturity Index. Managing the Digital Transformation of Companies (acatech STUDY); Herbert Utz Verlag: Munich, Germany, 2017. [Google Scholar]
- Ondemir, O.; Gupta, S. Quality management in product recovery using the Internet of Things: An optimization approach. Comput. Ind. 2014, 65, 491–504. [Google Scholar] [CrossRef]
- Ovchinnikov, A.; Blass, V.; Raz, G. Economic and Environmental Assessment of Remanufacturing Strategies for Product + Service Firms. Prod. Oper. Manag. 2014, 23, 744–761. [Google Scholar] [CrossRef]
- Aghili, S.F.; Mala, H.; Peris-Lopez, P. Securing Heterogeneous Wireless Sensor Networks: Breaking and Fixing a Three-Factor Authentication Protocol. Sensors 2018, 18, 3663. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Hu, Y.; Lu, Y. Sensitivity of PZT Impedance Sensors for Damage Detection of Concrete Structures. Sensors 2008, 8, 327–346. [Google Scholar] [CrossRef] [Green Version]
- Leo, D.J. Introduction to Smart Material Systems. In Engineering Analysis of Smart Material Systems; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Chen, Y.; Xue, X. Advances in the Structural Health Monitoring of Bridges Using Piezoelectric Transducers. Sensors 2018, 18, 4312. [Google Scholar] [CrossRef] [Green Version]
- Sohn, H.; Farrar, C.; Inman, D. Overview of Piezoelectric Impedance-Based Health Monitoring and Path Forward. The Shock Vibr. Dig. 2003, 35, 451–463. [Google Scholar]
- Yan, S.; Ma, H.; Li, P.; Song, G.; Wu, J. Development and Application of a Structural Health Monitoring System Based on Wireless Smart Aggregates. Sensors 2017, 17, 1641. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Perera, R.; Pérez, A.; García-Diéguez, M.; Zapico-Valle, J.L. Active Wireless System for Structural Health Monitoring Applications. Sensors 2017, 17, 2880. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Raghavan, A.; Cesnik, C.E.S. Finite-dimensional piezoelectric transducer modeling for guided wave based structural health monitoring. Smart Mater. Struct. 2005, 14, 1448–1461. [Google Scholar] [CrossRef]
- Giurgiutiu, V.; Zagrai, A.; Bao, J. Damage Identification in Aging Aircraft Structures with Piezoelectric Wafer Active Sensors. J. Int. Mater. Syst. Struct. 2004, 15, 673–687. [Google Scholar] [CrossRef]
- Giurgiutiu, V.; Redmond, J.M.; Roach, D.P.; Rackow, K. Active sensors for health monitoring of aging aerospace structures. Smart Struct. Integr. Syst. 2000, 3985, 294–305. [Google Scholar]
- Mascarenas, D.L.; Todd, M.D.; Park, G.; Farrar, C.R. Development of an impedance-based wireless sensor node for structural health monitoring. Smart Mater. Struct. 2007, 16, 2137–2145. [Google Scholar] [CrossRef] [Green Version]
- Aranguren, G.; Ortiz, J.; Etxaniz, J.; Murillo, N.; Maudes, J.; Donado, A.; Rueda, E.; Perez-Marquez, A. Impact Detection System for Structures during their Storage and Transport. In Proceedings of the 8th European Workshop on Structural Health Monitoring (EWSHM 2016), Bilbao, Spain, 5−8 July 2016; pp. 1812–1820. [Google Scholar]
- Ihn, J.B.; Chang, F.K. Pitch-catch Active Sensing Methods in Structural Health Monitoring for Aircraft Structures. Struct. Health Monit. 2008, 7, 5–19. [Google Scholar] [CrossRef]
- Bhuiyan, M.Y.; Lin, B.; Giurgiutiu, V. Characterization of Piezoelectric Wafer Active Sensor for Acoustic Emission Sensing. Ultrason. 2018, 92, 35–49. [Google Scholar] [CrossRef]
- Giurgiutiu, V.; Zagrai, A.; Bao, J.J. Piezoelectric Wafer Embedded Active Sensors for Aging Aircraft Structural Health Monitoring. Struct. Health Monit. 2002, 1, 41–61. [Google Scholar] [CrossRef]
- Ghareeb, N.; Farhat, M. Smart Materials and Structures: State of the Art and Applications. Nano Res. Appl. 2018, 4, 1–5. [Google Scholar]
- Bhalla, S.; Soh, C.K. Chapter 2 Electro-Mechanical Impedance Technique. In Smart Materials in Structural Health Monitoring, Control and Biomechanics; Springer: Berlin Heidelberg, Germany, 2012. [Google Scholar]
- Park, S.; Yun, C.-B.; Inman, D.J. Structural health monitoring using electro-mechanical impedance sensors. Fatigue Fract. Eng. Mater. Struct. 2008, 31, 714–724. [Google Scholar] [CrossRef]
- Yang, Y.; Divsholi, B.S. Sub-Frequency Interval Approach in Electromechanical Impedance Technique for Concrete Structure Health Monitoring. Sensors 2010, 10, 11644–11661. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Annamdas, V.G.M.; Yang, Y.; Soh, C.K. Influence of loading on the electromechanical admittance of piezoceramic transducers. Smart Mater. Struct. 2007, 16, 1888–1897. [Google Scholar] [CrossRef]
- Park, G.; Farrar, C.R.; di Scalea, F.L.; Coccia, S. Performance assessment and validation of piezoelectric active-sensors in structural health monitoring. Smart Mater. Struct. 2006, 15, 1673–1683. [Google Scholar] [CrossRef]
- Annamdas, V.G.M.; Soh, C.K. Load monitoring using a calibrated piezo diaphragm based impedance strain sensor and wireless sensor network in real time. Smart Mater. Struct. 2017, 26, 045036. [Google Scholar] [CrossRef]
- Liang, C.; Sun, F.P.; Rogers, C.A. Coupled Electro-Mechanical Analysis of Adaptive Material Systems Determination of the Actuator Power Consumption and System Energy Transfer. J. Int. Mater. Syst. Struct. 1994, 5, 12–20. [Google Scholar] [CrossRef]
- Rébillat, M.; Guskov, M.; Balmes, E.; Mechbal, N. Simultaneous Influence of Static Load and Temperature on the Electromechanical Signature of Piezoelectric Elements Bonded to Composite Aeronautic Structures. J. Vib. Acoust. 2016, 138, 064504. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Divsholi, B.S.; Soh, C.K. A Reusable PZT Transducer for Monitoring Initial Hydration and Structural Health of Concrete. Sensors 2010, 10, 5193–5208. [Google Scholar] [CrossRef]
- Filho, J.V.; Baptista, F.G.; Inman, D.J. Time-domain analysis of piezoelectric impedance-based structural health monitoring using multilevel wavelet decomposition. Mech. Syst. Signal Process. 2011, 25, 550–1558. [Google Scholar]
- Na, W.S.; Baek, J. A Review of the Piezoelectric Electromechanical Impedance Based Structural Health Monitoring Technique for Engineering Structures. Sensors 2018, 18, 1307. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Unload | Load | |||||
|---|---|---|---|---|---|---|
| Specimens | m (10−6) | n (10−4) | R2 | m (10−6) | n (10−4) | R2 |
| Steel (2 mm) | 1 | −1.07 | 0.9995 | 1 | −1.12 | 0.9994 |
| Steel (3 mm) | 0.97 | −1.05 | 0.9922 | 0.97 | −1.14 | 0.9945 |
| Aluminium (2 mm) | 2 | −1.39 | 0.9985 | 2 | −1.37 | 0.9992 |
| Aluminium (3 mm) | 3 | −1.40 | 0.9950 | 3 | −1.40 | 0.9932 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Perez-Alfaro, I.; Gil-Hernandez, D.; Muñoz-Navascues, O.; Casbas-Gimenez, J.; Sanchez-Catalan, J.C.; Murillo, N. Low-Cost Piezoelectric Sensors for Time Domain Load Monitoring of Metallic Structures During Operational and Maintenance Processes. Sensors 2020, 20, 1471. https://doi.org/10.3390/s20051471
Perez-Alfaro I, Gil-Hernandez D, Muñoz-Navascues O, Casbas-Gimenez J, Sanchez-Catalan JC, Murillo N. Low-Cost Piezoelectric Sensors for Time Domain Load Monitoring of Metallic Structures During Operational and Maintenance Processes. Sensors. 2020; 20(5):1471. https://doi.org/10.3390/s20051471
Chicago/Turabian StylePerez-Alfaro, Irene, Daniel Gil-Hernandez, Oscar Muñoz-Navascues, Jesus Casbas-Gimenez, Juan Carlos Sanchez-Catalan, and Nieves Murillo. 2020. "Low-Cost Piezoelectric Sensors for Time Domain Load Monitoring of Metallic Structures During Operational and Maintenance Processes" Sensors 20, no. 5: 1471. https://doi.org/10.3390/s20051471