Measuring the Wave Height Based on Binocular Cameras


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Work
3. The Proposed Stereo Match Algorithm
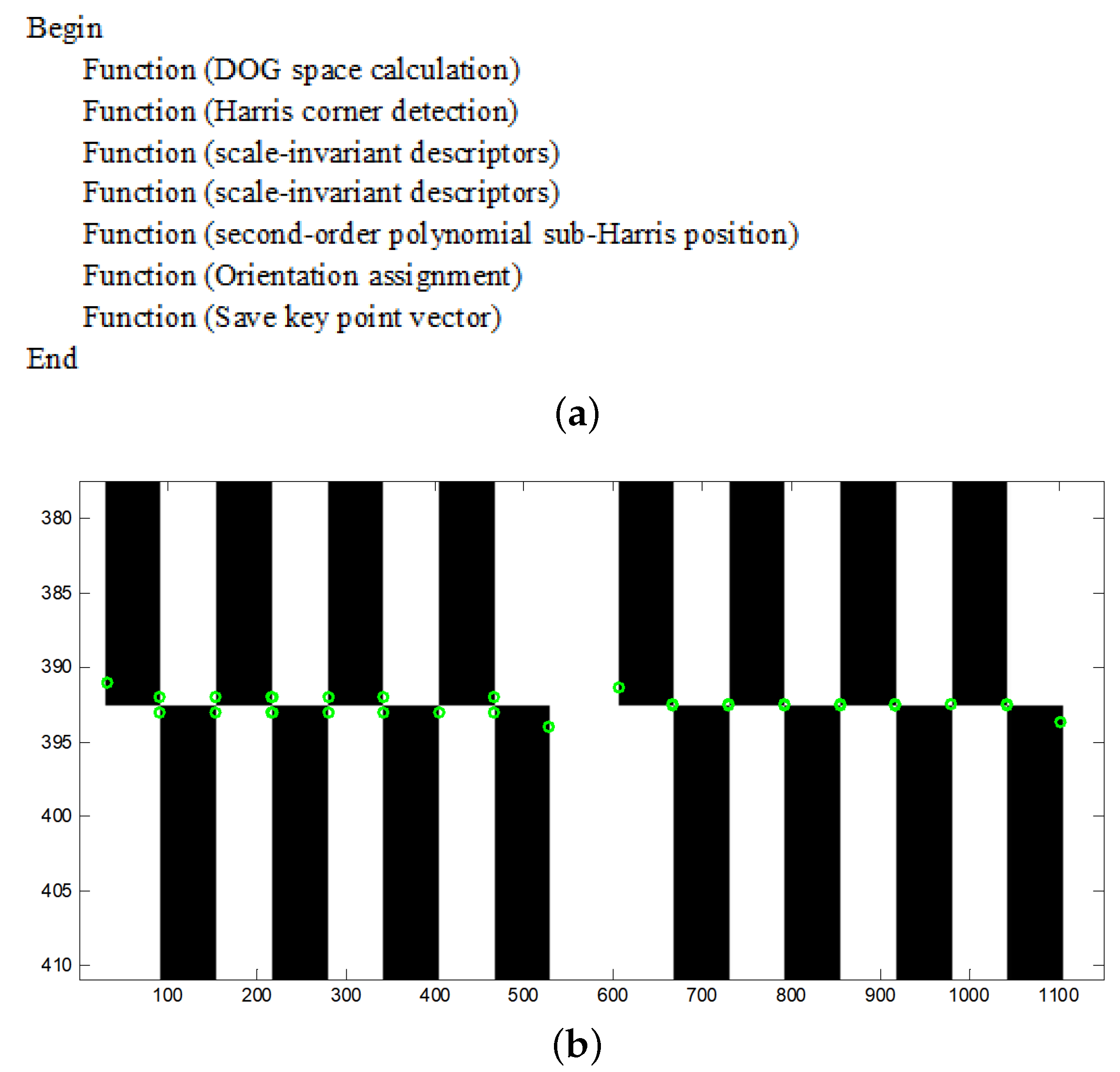
3.1. Corner Detection
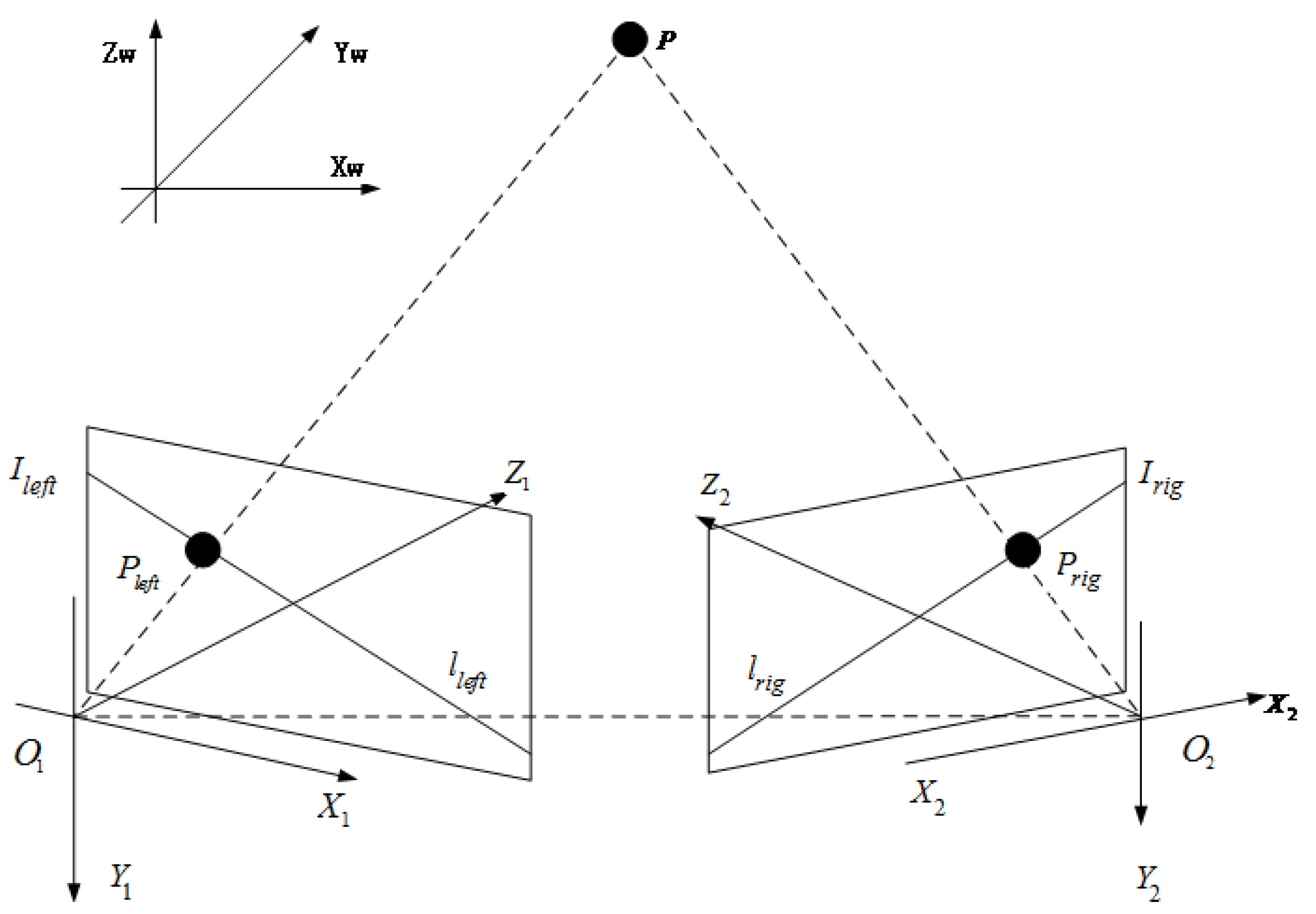
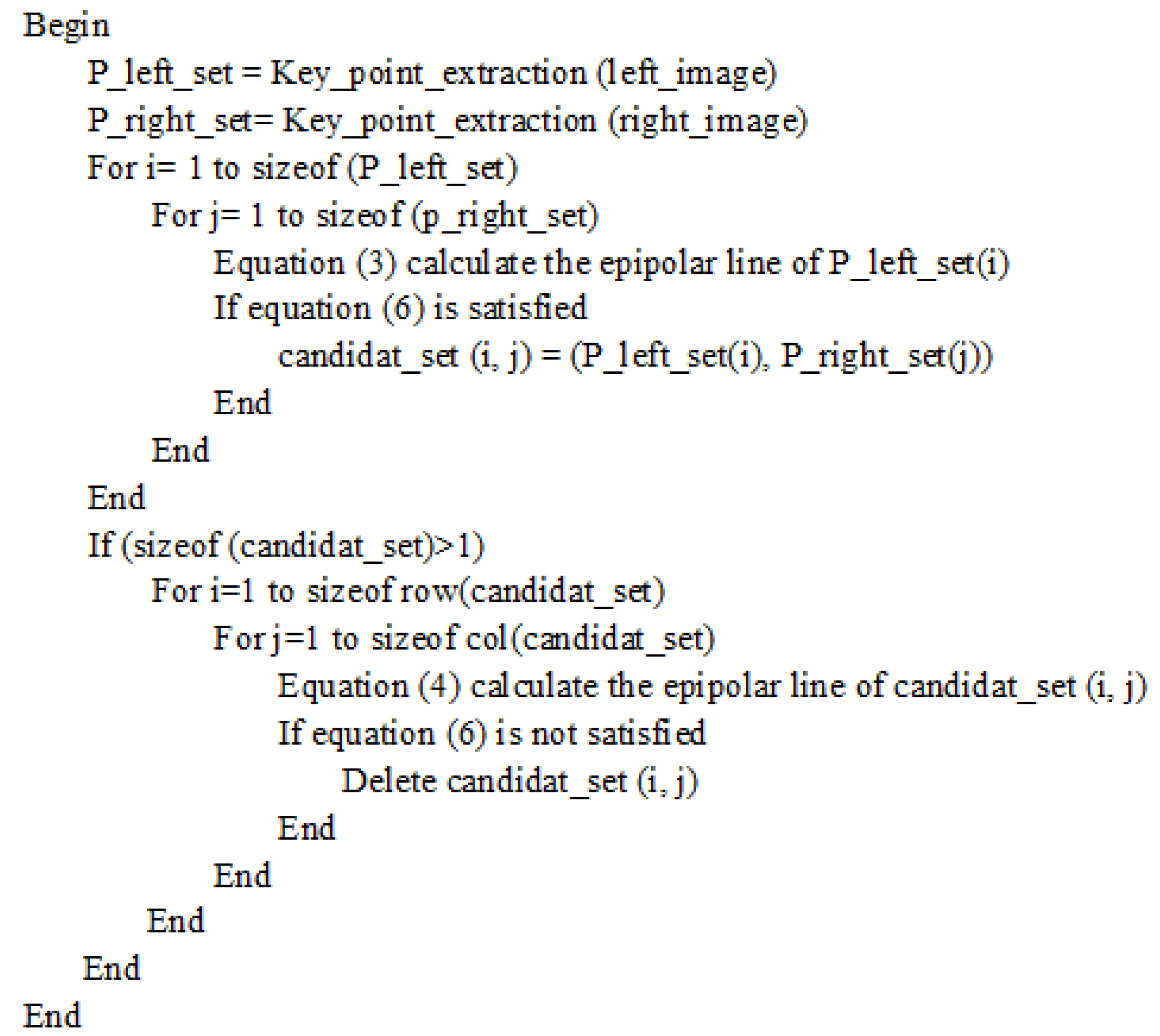
3.2. Stereo Matching Algorithm
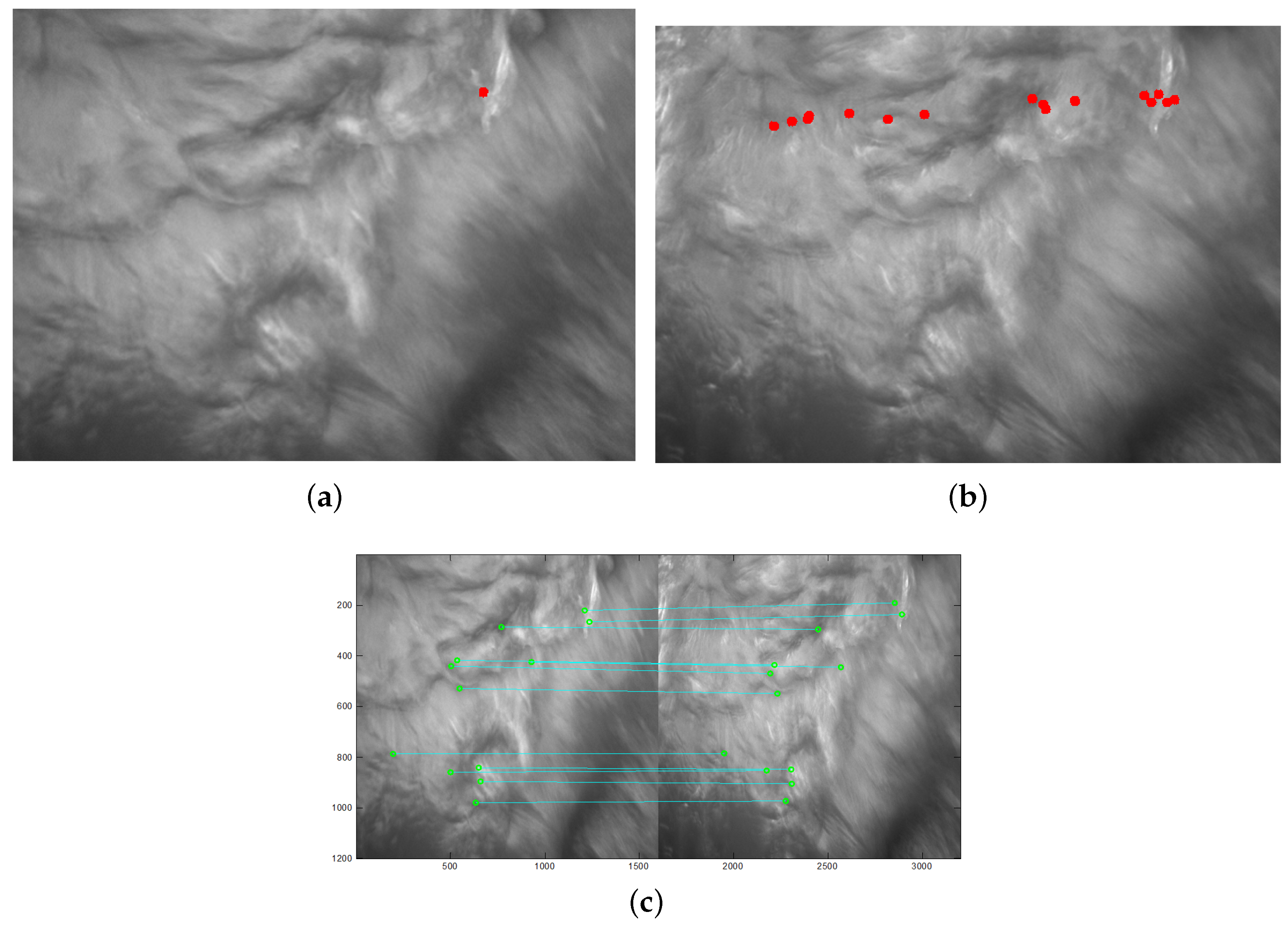
4. Experimental Results
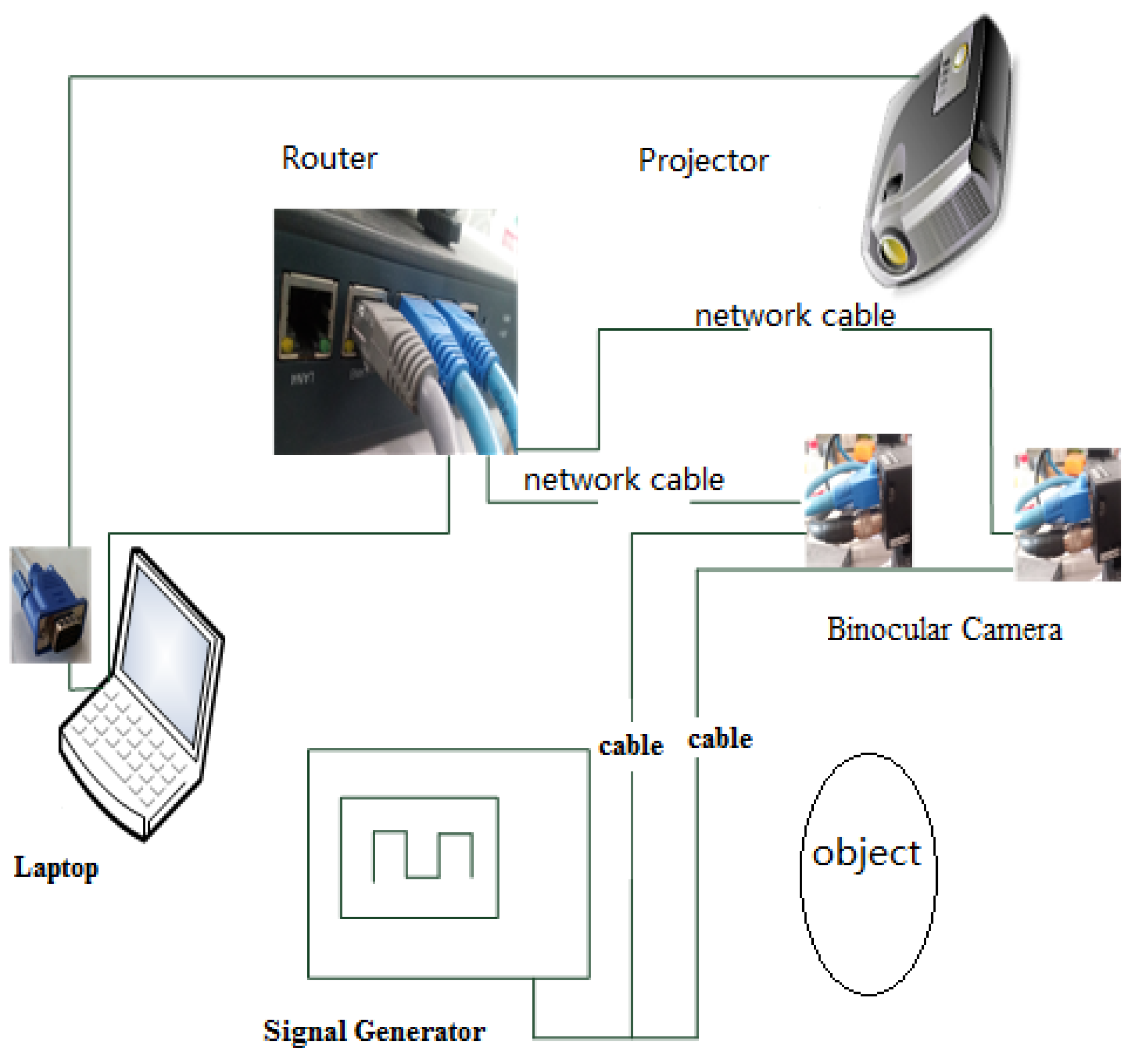
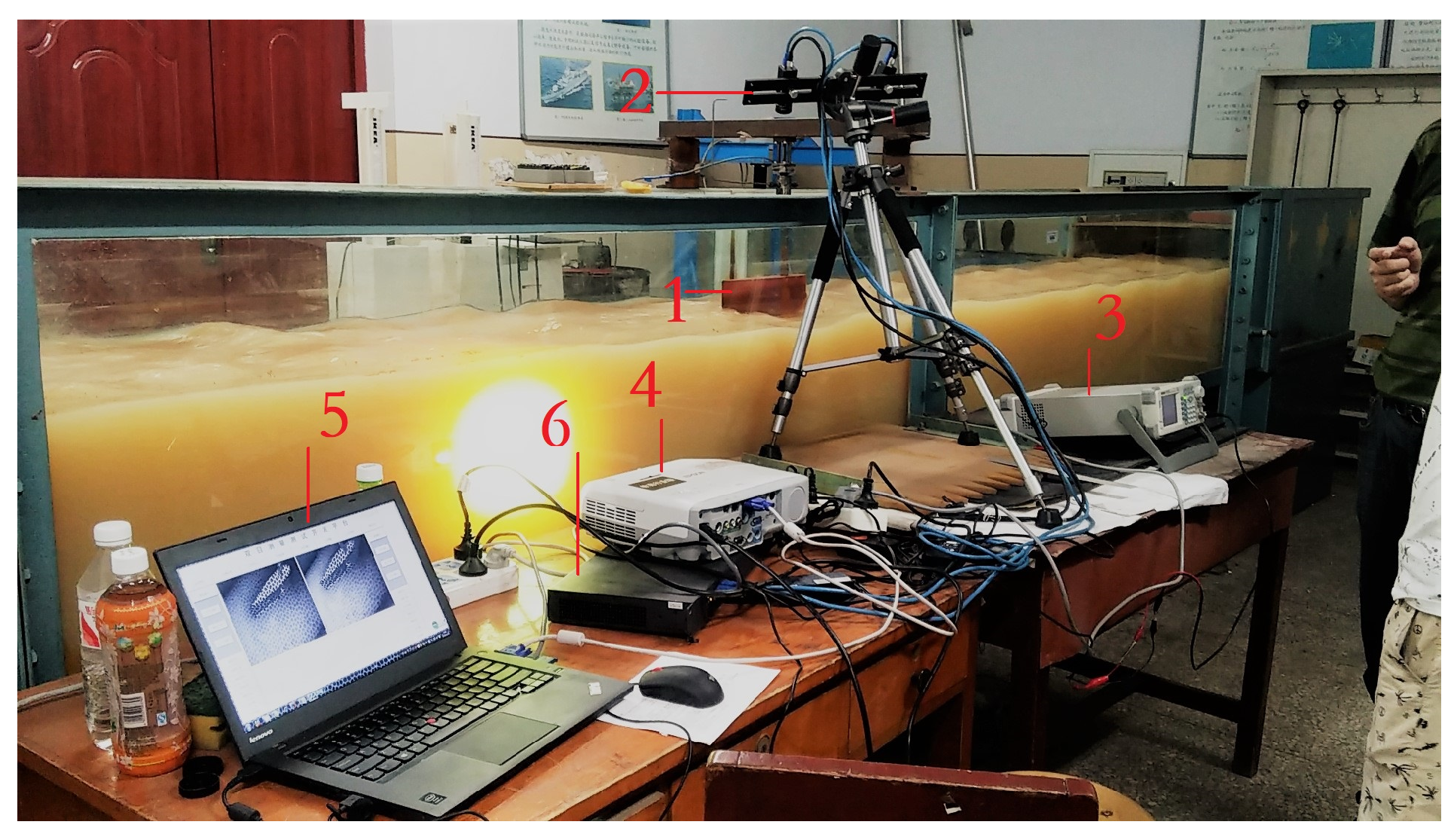
4.1. Experimental Equipment
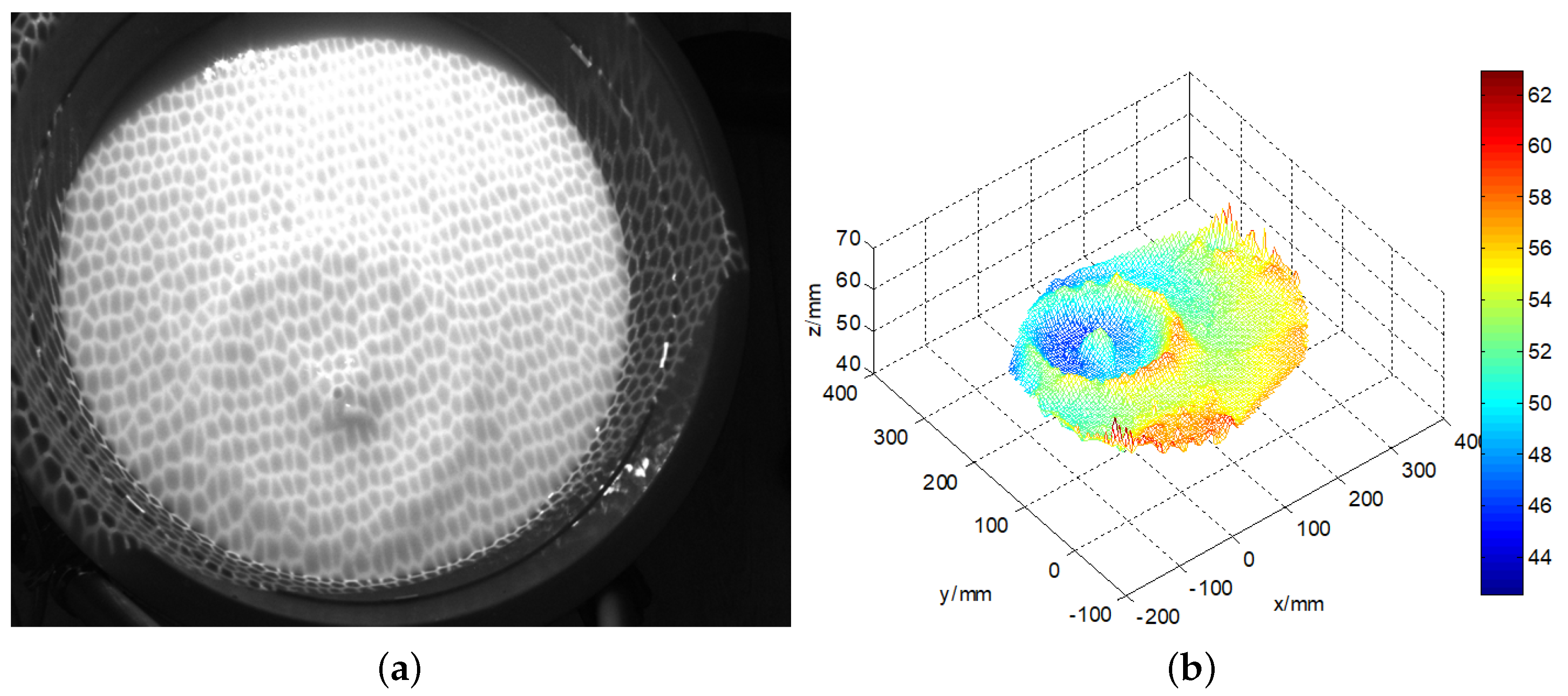
4.2. Experiment in a Circular Storage Tank
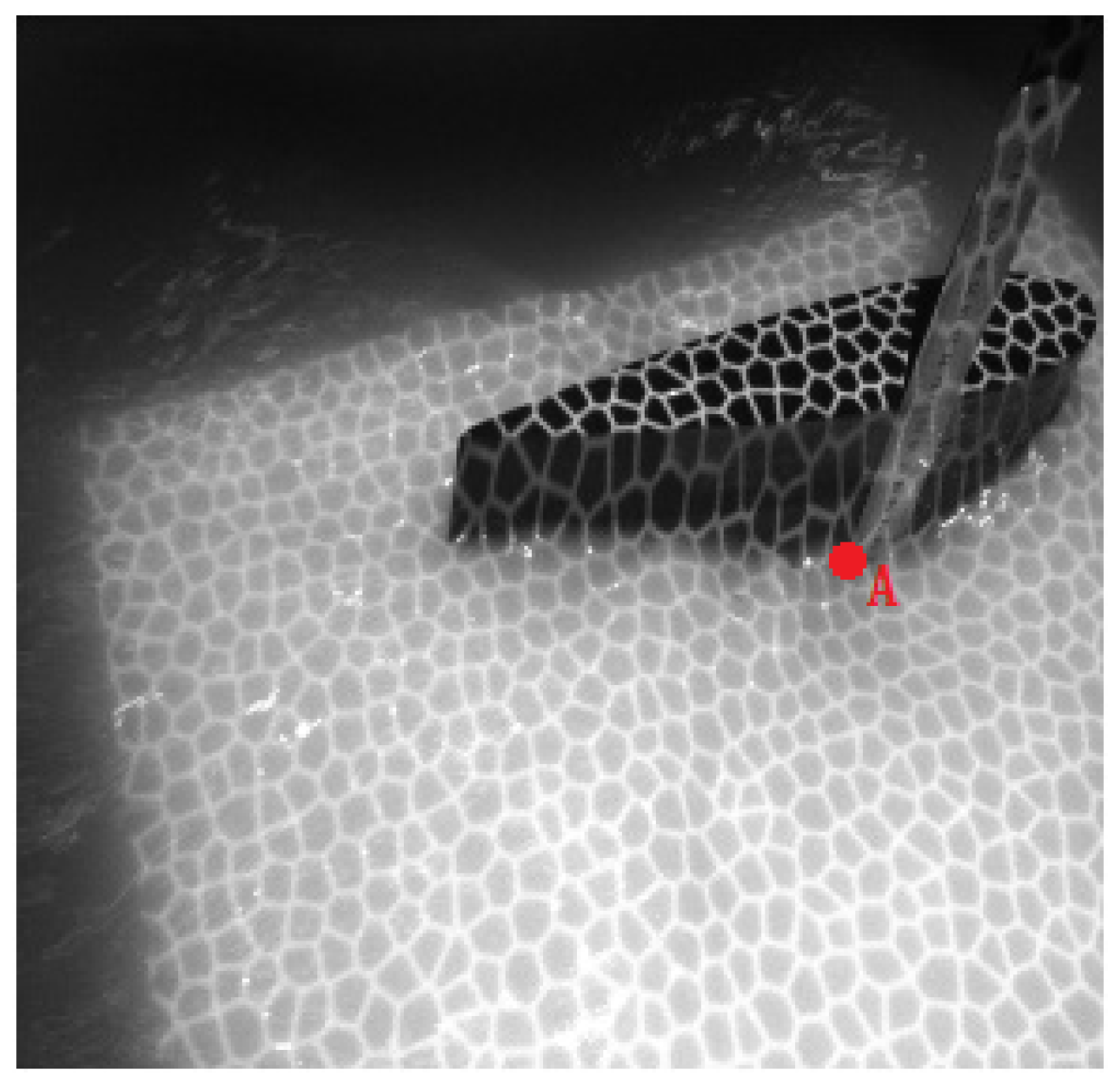
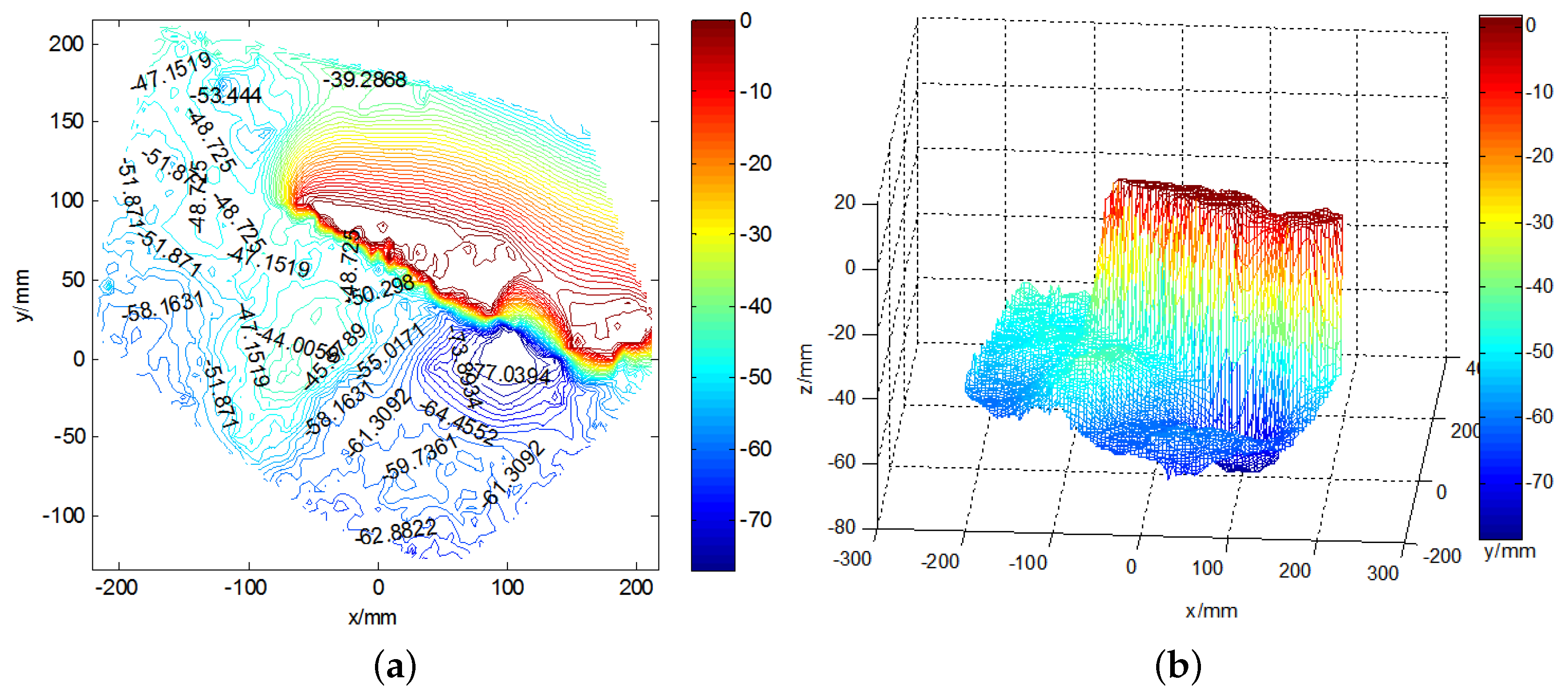
4.3. Experiment in a Tank
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhou, L.; Hu, Y.; Zong, Z.; Yu, Z.; Pei, Y. Generation and propagation of internal wave and its interaction with ocean structures. Sci. Found. China 2017, 3, 72–80. [Google Scholar]
- Cuypers, Y.; Vaillant, X.L.; Bouruet-Aubertot, P.; Vialard, J.; Mcphaden, M.J. Tropical storm-induced near-inertial internal waves during the Cirene experiment: Energy fluxes and impact on vertical mixing. J. Geophys. Res. Oceans 2013, 118, 358–380. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Mao, X.; Zhang, J.; Ji, Y. Detection of Vessel Targets in Sea Clutter Using In Situ Sea State Measurements With HFSWR. IEEE Geosci. Remote Sens. Lett. 2018, 15, 302–306. [Google Scholar] [CrossRef]
- Amstutz, E.D. Stereophotogrammetric Reconnaissance of Ocean Wave/Sea Ice Interaction [Microform]. Dissertation Abstracts Int. 1977, 38, 120. [Google Scholar]
- Chen, Z.; He, Y.; Zhang, B. An Automatic Algorithm to Retrieve Wave Height from X-Band Marine Radar Image Sequence. IEEE Trans. Geosci. Remote Sens. 2017, 55, 5084–5092. [Google Scholar] [CrossRef]
- Broeders, J.; Pascal, R.W.; Cresens, C.; Waugh, E.W.; Cardwell, C.L.; Yelland, M.J. Smart electronics for high accuracy wave height measurements in the open ocean. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–5. [Google Scholar]
- Salin, B.M.; Salin, M.B. Combined Method for Measuring 3D Wave Spectra. I. Algorithms to Transform the Optical-Brightness Field into the Wave-Height Distribution. Radiophys. Quantum Electron. 2015, 58, 114–123. [Google Scholar] [CrossRef] [Green Version]
- Lataitis, R.J.; Crawford, G.B.; Clifford, S.F. A new acoustic technique for remote measurement of the temporal ocean wave spectrum. IEEE Oceans 1988, 2, 315–317. [Google Scholar]
- Kim, W.J.; Van, S.H.; Kim, D.H. Measurement of flows around modern commercial ship models. Exp. Fluids 2001, 31, 567–578. [Google Scholar] [CrossRef]
- Moisy, F.; Rabaud, M.; Salsac, K. A synthetic Schlieren method for the measurement of the topography of a liquid interface. Exp. Fluids 2009, 46, 1021–1036. [Google Scholar] [CrossRef]
- Lowe, D.G.; Lowe, D.G. Distinctive Image Features from Scale-Invariant Key-points. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Tsubaki, R.; Fujita, I. Stereoscopic measurement of a fluctuating free surface with discontinuities. Meas. Sci. Technol. 2005, 16, 1894–1902. [Google Scholar] [CrossRef]
- Douxchamps, D.; Devriendt, D.; Capart, H.; Craeye, C.; Macq, B.; Zech, Y. Stereoscopic and velocimetric reconstructions of the free surface topography of antidune flows. Exp. Fluids 2005, 39, 535–553. [Google Scholar] [CrossRef] [Green Version]
- Felice, F.D.; Pereira, F. Developments and Applications of PIVin Naval Hydrodynamics. In Particle Image Velocimetry; Springer: Berlin/Heidelberg, Germany, 2008; pp. 475–503. [Google Scholar]
- Turney, D.E. Improved Understanding of air–water Transfer of Volatile Chemicals. Master’s Thesis, University of California, Berkeley, CA, USA, 2009. [Google Scholar]
- Fedele, F.; Benetazzo, A.; Gallego, G.; Shih, P.C.; Yezzi, A.; Barbariol, F.; Ardhuin, F. Space-time measurements of oceanic sea states. Ocean Model. 2013, 70, 103–115. [Google Scholar] [CrossRef]
- Viriyakijja, K.; Chinnarasri, C. Wave Flume Measurement Using Image Analysis. Aquat. Procedia 2015, 4, 522–531. [Google Scholar] [CrossRef]
- Chatellier, L.; Jarny, S.; Gibouin, F.; David, L. A parametric PIV/DIC method for the measurement of free surface flows. Exp. Fluids 2013, 54, 1488. [Google Scholar] [CrossRef]
- Gomit, G.; Chatellier, L.; Calluaud, D.; David, L. Free surface measurement by stereo-refraction. Exp. Fluids 2013, 54, 1540. [Google Scholar] [CrossRef]
- Gomit, G.; Chatellier, L.; Calluaud, D.; David, L.; Fréchou, D.; Boucheron, R.; Hubert, C. Large-scale free surface measurement for the analysis of ship waves in a towing tank. Exp. Fluids 2015, 56, 1–13. [Google Scholar] [CrossRef]
- Suzuki, T.; Sumino, K. A Technique to Measure Wave Height Using Projected Light Distribution on the Screen Near the Water Surface. J. Kansai Soc. Naval Archit. Jpn. 1993, 13 (Suppl. 1), 241–244. [Google Scholar]
- Sanada, Y.; Hamachi, S.; Toda, Y. 2006A-G3-9 Development of a New Technique to MeasureWave Height Distribution Using Reflected Light Image. In Proceedings of the The Japan Society of Naval Architects and Ocean Engineers. Available online: https://ci.nii.ac.jp/naid/110007185859/en (accessed on 17 March 2019).
- Sanada, Y.; Toda, Y.; Hamachi, S. The development of the new technique which measures the unsteady density field: The examination on density field reconstruction method. J. Jpn. Soc. Naval Archit. Ocean Eng. 2005, 2, 57–63. [Google Scholar] [CrossRef]
- Ng, I.; Kumar, V.; Sheard, G.J.; Hourigan, K.; Fouras, A. Experimental study of simultaneous measurement of velocity and surface topography: In the wake of a circular cylinder at low Reynolds number. Exp. Fluids 2011, 50, 587–595. [Google Scholar] [CrossRef]
- Zhang, Z. A Flexible New Technique for Camera Calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- Wu, F. Research on Digital Method of Measuring the Height of Ocean Wave. Ph.D. Thesis, Tianjin University, Tianjin, China, June 2010. [Google Scholar]















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cang, Y.; He, H.; Qiao, Y. Measuring the Wave Height Based on Binocular Cameras. Sensors 2019, 19, 1338. https://doi.org/10.3390/s19061338
Cang Y, He H, Qiao Y. Measuring the Wave Height Based on Binocular Cameras. Sensors. 2019; 19(6):1338. https://doi.org/10.3390/s19061338
Chicago/Turabian StyleCang, Yan, Hengxiang He, and Yulong Qiao. 2019. "Measuring the Wave Height Based on Binocular Cameras" Sensors 19, no. 6: 1338. https://doi.org/10.3390/s19061338
APA StyleCang, Y., He, H., & Qiao, Y. (2019). Measuring the Wave Height Based on Binocular Cameras. Sensors, 19(6), 1338. https://doi.org/10.3390/s19061338