1. Introduction
Stiffness is an important evaluation index for mechanical structures, which describes the extent to which an object resists deformation in response to an applied force. For a rotating machinery system, the output dynamic stiffness reflects the resistant ability of the structure of a system against dynamic torsional disturbance. A working knowledge of dynamic stiffness for the machinery engineer is as useful and indispensable as Ohm’s Law is for the electrical engineer. The dynamic torsional stiffness test for rotating structures has been extensively studied [
1,
2,
3,
4], in which a dynamic exciter plays a key role by providing dynamic torque in a short-range reciprocating motion [
5]. With the growing demand of high-frequency actuation in applications such as motor vehicles and aerospace equipment [
4], the design of the dynamic exciter has been confronted with the contradiction between high torque and high frequency, since the acceleration motion consumes a lot of output torque.
Electrodynamic exciters can directly provide high-dynamic precision short-stroke reciprocating movements, combined with low power losses without any motion conversion mechanisms [
6], and it has a faster dynamic response than other kinds of dynamic exciters, such as hydraulic ones. With the improvement of modern permanent magnet synchronous motor (PMSM) torque output capabilities, electrodynamic exciters have received great attention recently, and they are widely used in dynamic torsional stiffness tests [
4,
5]. Compared with moving iron and moving coil motors, the moving-magnet PMSM is characterized by a smaller air gap and a higher torque density, and consequently, it has become the most suitable and common choice for electrodynamic exciters [
7,
8,
9,
10,
11].
From the viewpoint of motor design, the gap radius (GR) and the axial length of the PMSM are the critical parameters that affect acceleration capability (torque per inertia). The torque is proportional to GR
2, and the rotor inertia is proportional to GR
3; therefore, the acceleration capability is proportional to 1/GR. Meanwhile, the axial length of the motor is proportional to the torque, and it does not affect the torque per inertia. Thus, to achieve satisfactory dynamic performance by the electrodynamic exciters, the most effective way is to improve torque per inertia by appropriately reducing the gap radius, and increasing the axial length. Compared with conventional PMSMs, disk-type permanent magnet (PM) motors can be designed in a multistage configuration with extreme axial compactness [
7]; thus, they are more suitable for high-acceleration applications such as electrodynamic exciters [
8,
9,
10].
In conventional disk motors, rotor magnet arrays usually introduce axial North-South alternate magnetization arrays with an inevitably thick back-iron to eliminate saturation and to create flux paths, which becomes a bottleneck for improving motor dynamic performance [
7,
8,
9,
10,
11]. With the help of a Halbach array, which has a high PM working point and self-shielding magnetization, the thickness of the back-iron can be reduced or even removed, reducing the rotor inertia significantly [
11]. As a result, multipole Halbach magnetized movers/rotors have been developed for various applications [
12], and researchers are focused on changing the magnet shape in the Halbach array, such as a T-shape, triangle, trapezoidal shape, or a compound dual-layer structure, to increase self-shielding effects, improve the thrust/torque output, and to decrease the thrust/torque variation of the PMSMs [
11,
12,
13,
14,
15]. However, the fabrication of complex magnet shapes is too difficult, especially for disk motors, which vary in structure size with radius. In general, research on the Halbach array for disk motors used in electrodynamic exciters for the dynamic stiffness test is insufficient.
This paper proposes a novel multi-module moving-magnet disk voice coil motor-based electrodynamic exciter (DVCM-EDE) for the high-bandwidth dynamic torsional stiffness test. A simple structure of the Halbach array that has a variable pole-arc ratio in radial direction was introduced for enhancing the magnetic field in the working range, and the back-iron could be removed completely to reduce the rotor inertia significantly without affecting the torque-generating ability too much.
Section 2 gives the principles and structures of the proposed variable pole-arc ratio disk Halbach array (VPAR-DHA) and DVCM-EDE. Based on the VPAR-DHA structure, quasi-3-D models of the magnetic field and the torque were derived by using the harmonic function method in
Section 3.1, and then the correction function of the quasi-3-D model with end-effects was considered in
Section 3.2.
Section 3.3 gives the electromagnetic structure optimization results based on the quasi-3-D model with 3-D finite-element method (FEM) validation.
Section 4 provides the prototype design and experimental results on the static electromagnetic performance and dynamic response. Finally, a conclusion is made in
Section 5.
2. Principle and Structure
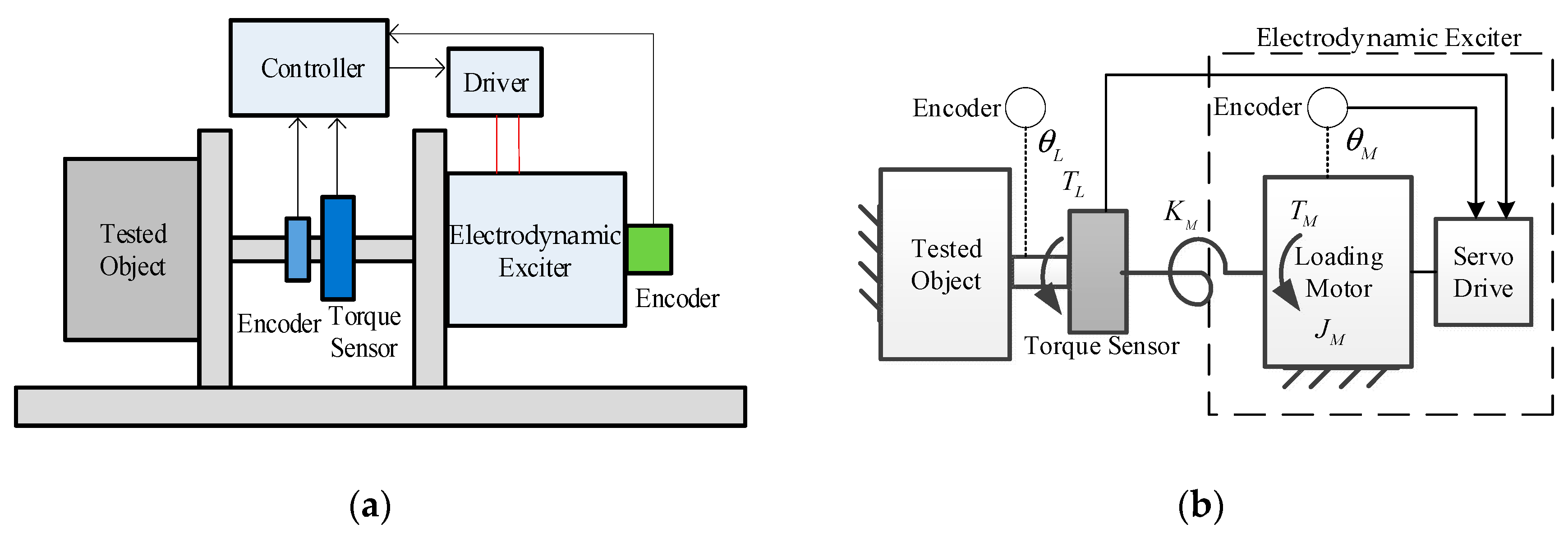
2.1. Principle of the Dynamic Torsional Stiffness Test
The principle of the dynamic torsional stiffness test with an electrodynamic exciter and its simplified diagram is shown in
Figure 1.
The testing system mainly consists of the electrodynamic exciter, exciter driver and controller, encoders for feedback reference and for testing, torque sensor, transmission link, tested object, and mounting bases.
During testing, the tested object is locked into a specific working position. The exciter output sweeping torque signals within the loading bandwidth at the output terminal of the tested object. The Encoder and the torque sensor are arranged at the terminal to acquire real-time torque and angular signals. According to the definition, the output dynamic torsional stiffness of the tested object is given by:
where
is the position of the test end;
is the load torque, which is the output of loading motor within the electrodynamic exciters. Both can be directly sampled with sensors.
The system test ability is determined by the loading capacity of the exciter. Considering the moment of inertia of the exciter, and the stiffness of the transmission link, the transfer function from the electromagnetic torque and the position of the test end to the load torque can be obtained as:
where
and
are the rotor inertia and electromagnetic torque of the loading motor, respectively;
is the equivalent transmission stiffness.
The tested object in the dynamic torsional stiffness test often contains complex transmission mechanisms, such as a reduction gearbox or worm gear. In order to obtain real measurement results, the electrodynamic exciter often operates with up to degree magnitudes, and it has to implement direct driving to maintain at a high enough value. As a result, the only effective way to improve the dynamic performance of the electrodynamic exciter is to promote without the geometric multiplier growth of , which is the main obstacle of the loading motor design.
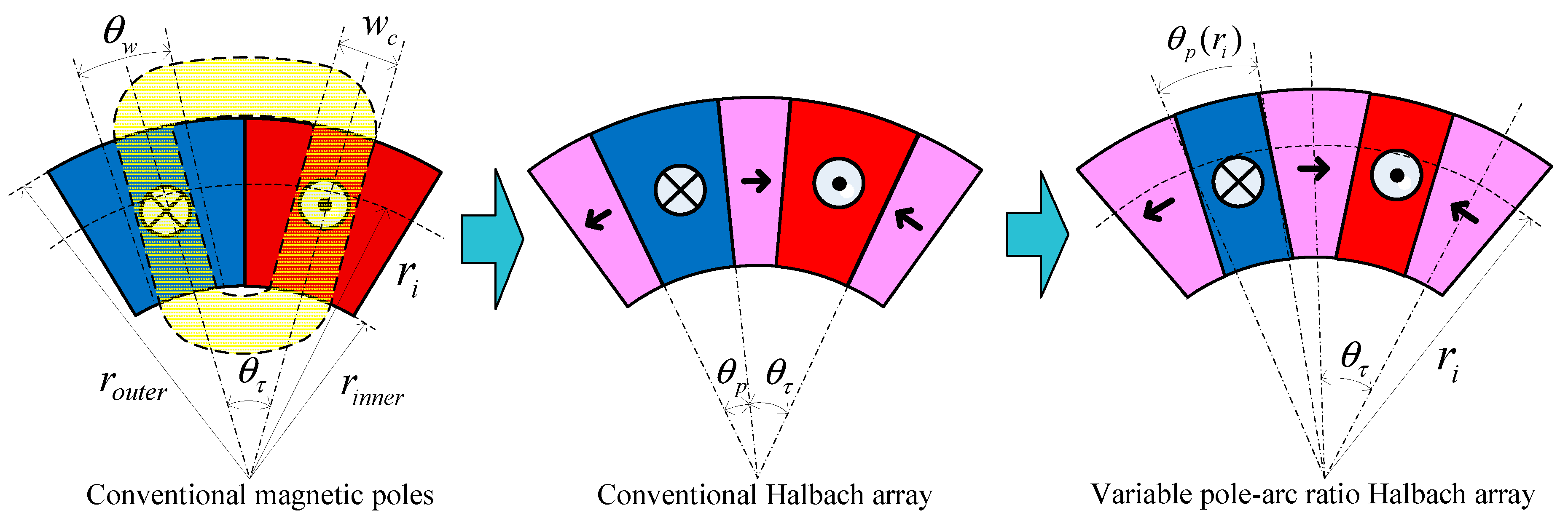
2.2. The Variable Pole-Arc Ratio Disk Halbach Array
To improve the output performance of the loading motor in the electrodynamic exciter, a variable pole-arc ratio disk Halbach array was introduced for DVCM rotor design, as shown in
Figure 2, where
and
are the outer and inner radii of the magnet array, respectively;
is the radii between
and
;
and
are the mechanical angles of the axial magnetization PM and the magnetic pole, respectively;
is the mechanical angle corresponding to the motion range of the coil;
is the coil width.
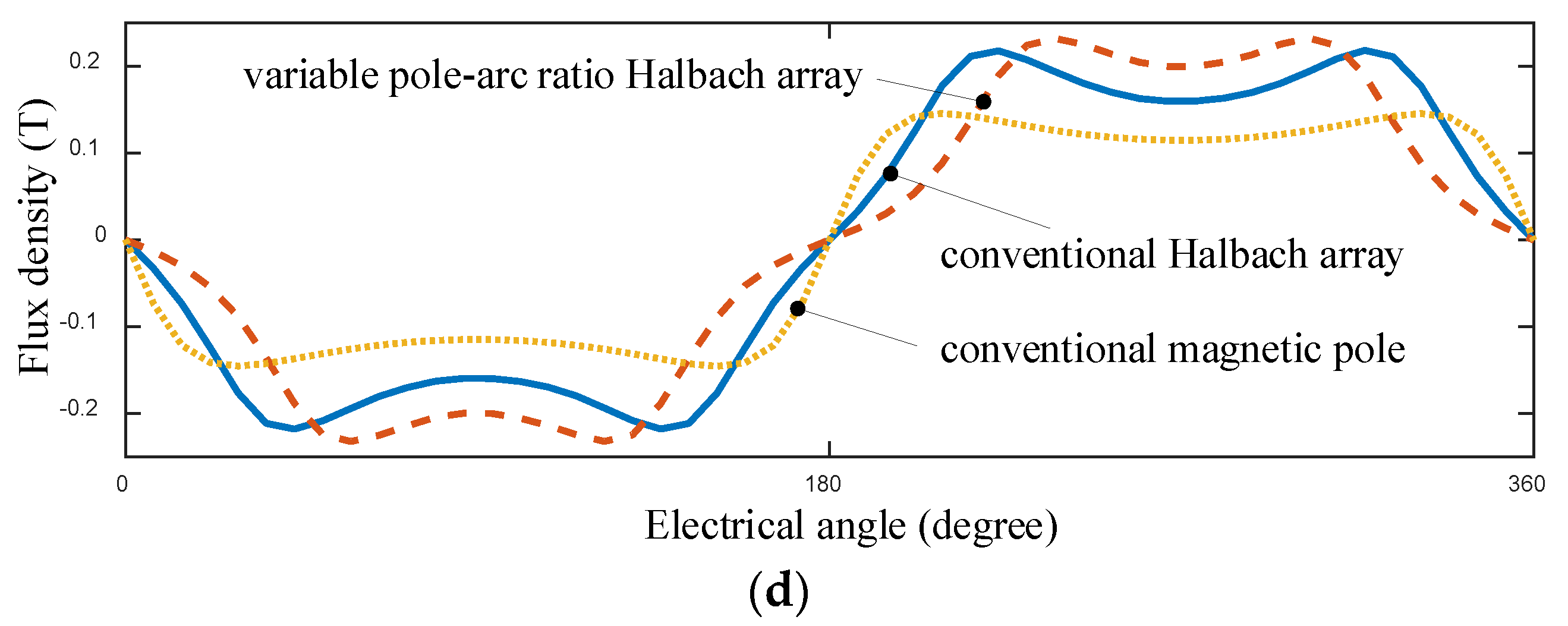
In conventional magnetic poles and conventional Halbach arrays,
and
do not vary with
, so that the pole-arc ratios given by
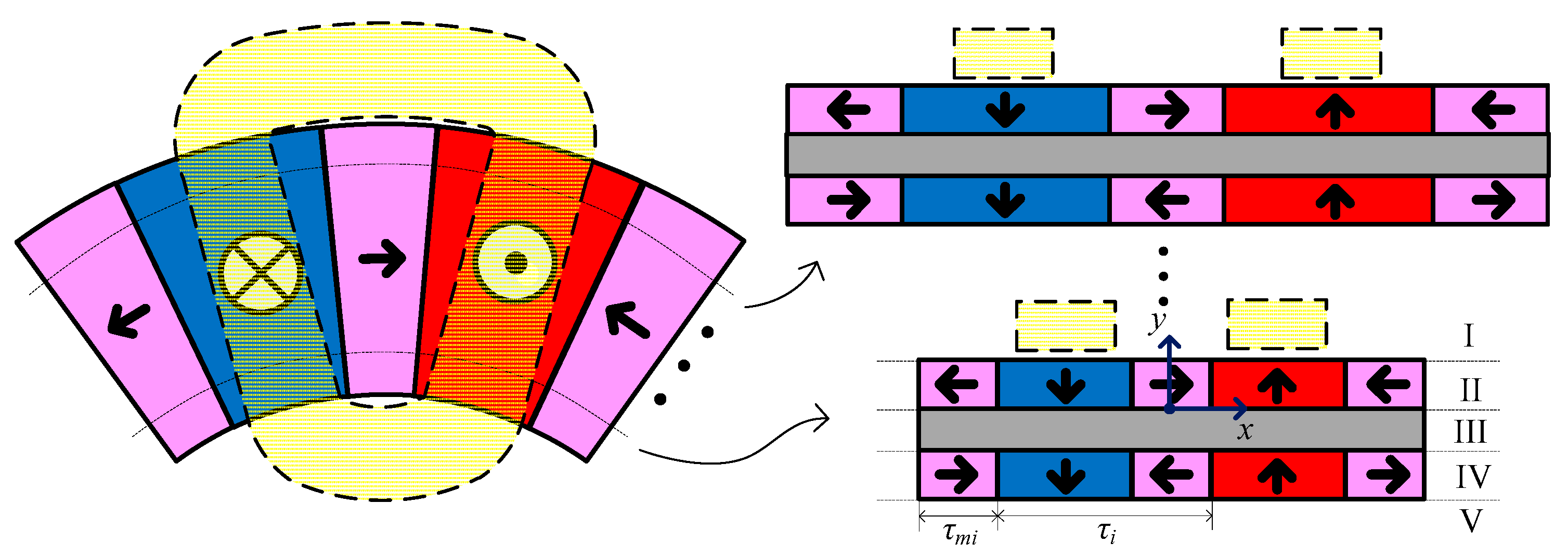
are constants. To enhance the magnetic field in a range of motion, the VPAR-DHA structure was proposed based on the following facts: (1) the flux-focusing effect of the Halbach array increases with the decrease of the pole-arc ratio, while the working range of magnetic field decreases; (2)
decreases as
increases, since
is a constant; (3) the outside of a coil contributes more to torque generation than the inner side, if the flux density is the same. The variable pole-arc ratio is given by:
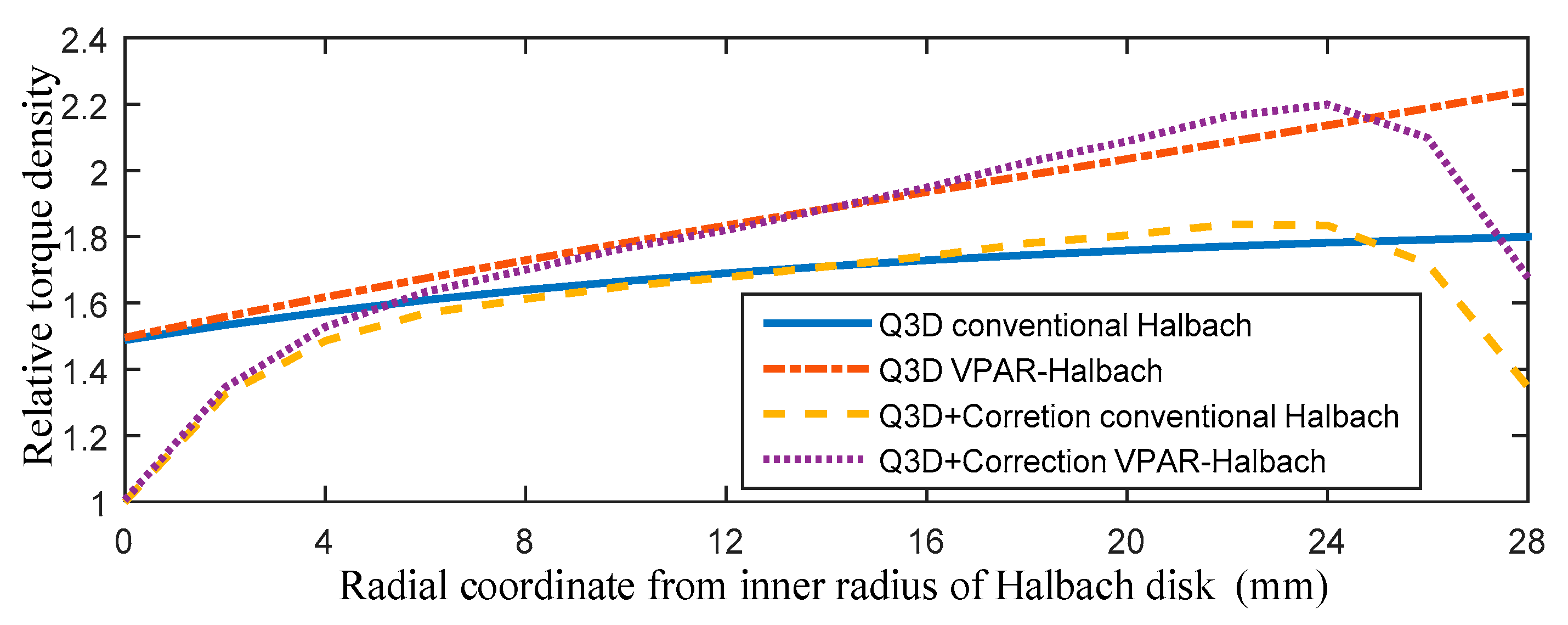
Corresponding to , decreases with the increase of . This structure not only ensures that the coil stays in the working range of the magnetic field, but it also enhances the average flux density in the working range, with the increase of radius. As the electromagnetic torque at a certain radius , the torque output capacity can be promoted significantly with the VPAR-DHA structure.
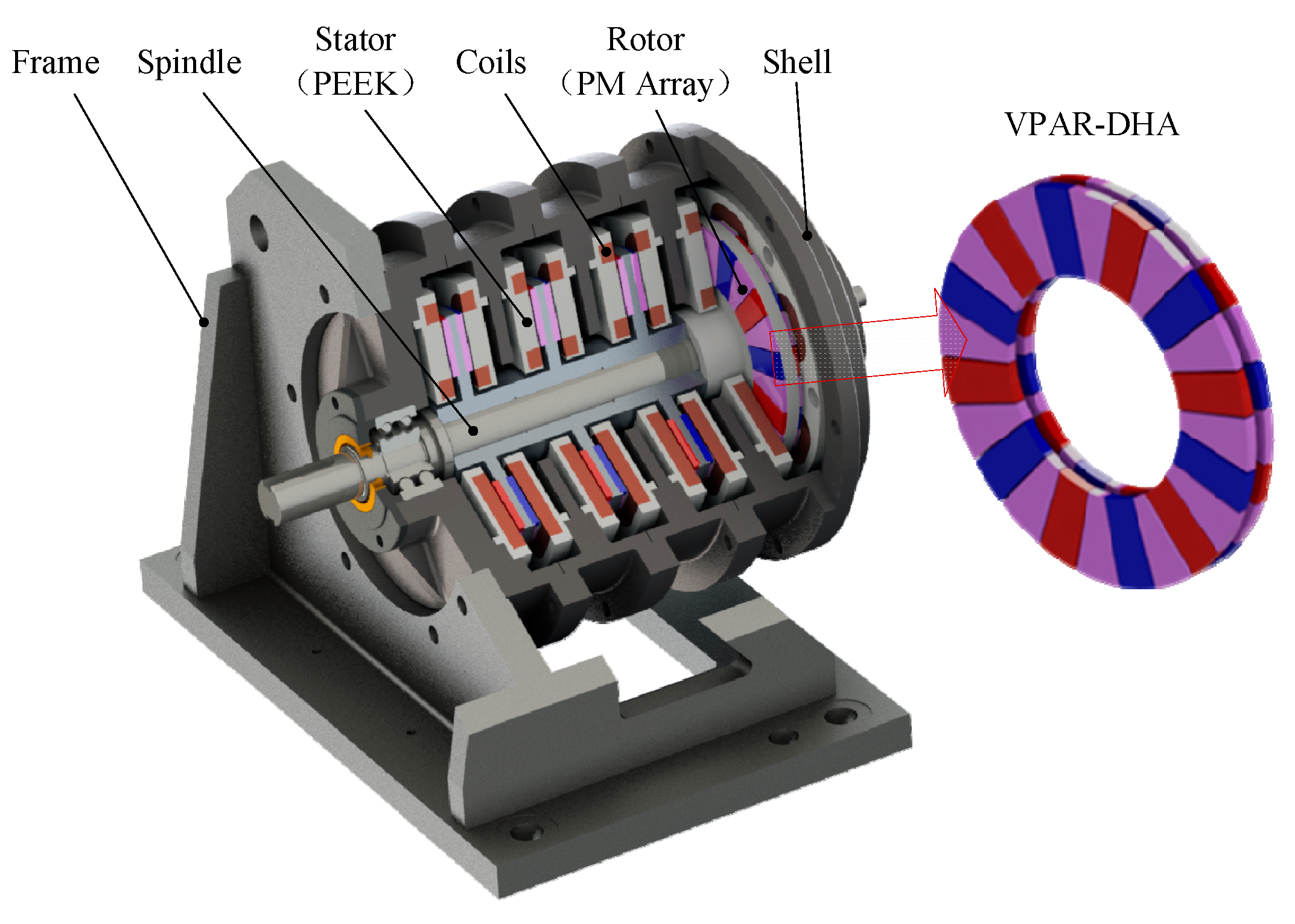
2.3. Multi-Module Structure of the Electrodynamic Exiter
The torque output capability of a single DVCM is limited. To meet the various demands of the dynamic torsional stiffness test, a multi-module DVCM-EDE with VPAR-DHA structure was proposed. It is a multi-structure that contains a number of modularly designed moving-magnet-type DVCMs that provide distributed power to achieve high loads of torque-output capability, as shown in
Figure 3.
As a short-range reciprocating actuator, each DVCM was designed to be a single-phase DC-PMSM, in which the numbers of the magnetic pole and the coil are the same. Coils were assembled in polyether ether ketone (PEEK) stators, and in the stable reversing magnetic field area of the magnetic poles. The stator is ironless, and it is completely exempt from the cogging torque’s influence. As the twin stators work in reversing fields, the directions of current for each pair of stators are in the opposite directions, to generate a resultant torque. A Dual-layer VPAR-DHA pasted onto an aluminum alloy yoke works as rotor, whose inertia is remarkably reduced, with the back-iron removed. The rotors were fixed on a single spindle made of 40CrMo, to ensure the system’s stiffness. The whole structure can be characterized by direct drive, high speed, high acceleration, high positioning precision, fast dynamics, and low torque pulsation, which makes it easy to maintain.
The output capability of the exciter can be expanded by increasing the module numbers in the axial direction without reducing the torque density. As the DVCMs are modularly designed, the optimization of a single joint design will significantly improve the whole performance of the exciter. The detailed calculations and analyses are described in the following sections.
4. Prototyping and Experiments
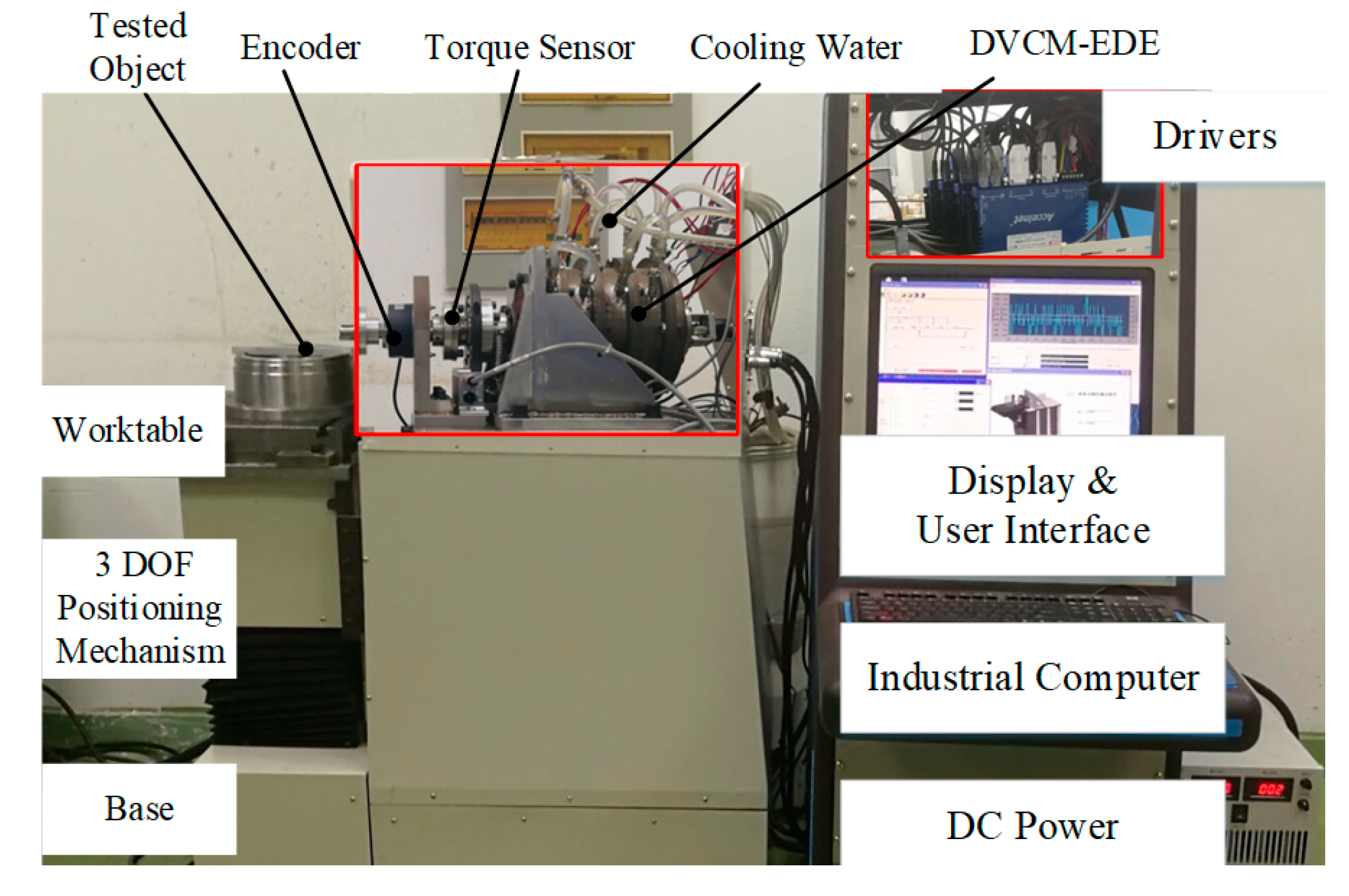
According to the analysis and the optimization in the previous section, a quad-module DVCM-EDE prototype and its test platform were accomplished, as shown in
Figure 13.
The internal components of the prototype, including the drivers and the loading system, are illustrated in the detailed subfigures for better understanding. The test platform also consists of an industrial computer, driving circuits, feedback sensors, testing sensors, base, 3-DOF positioning system, DC power supply, cooling system, etc.
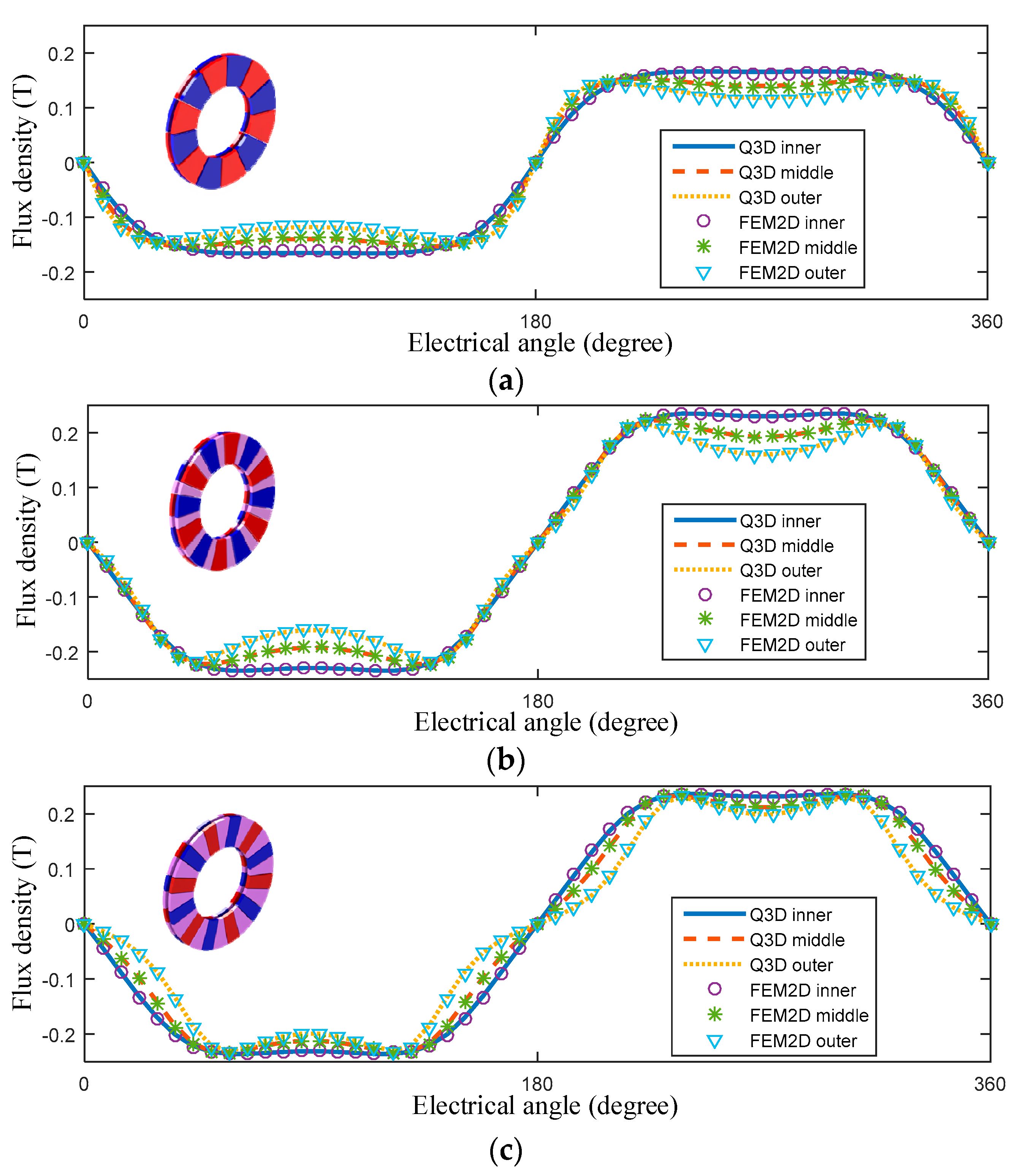
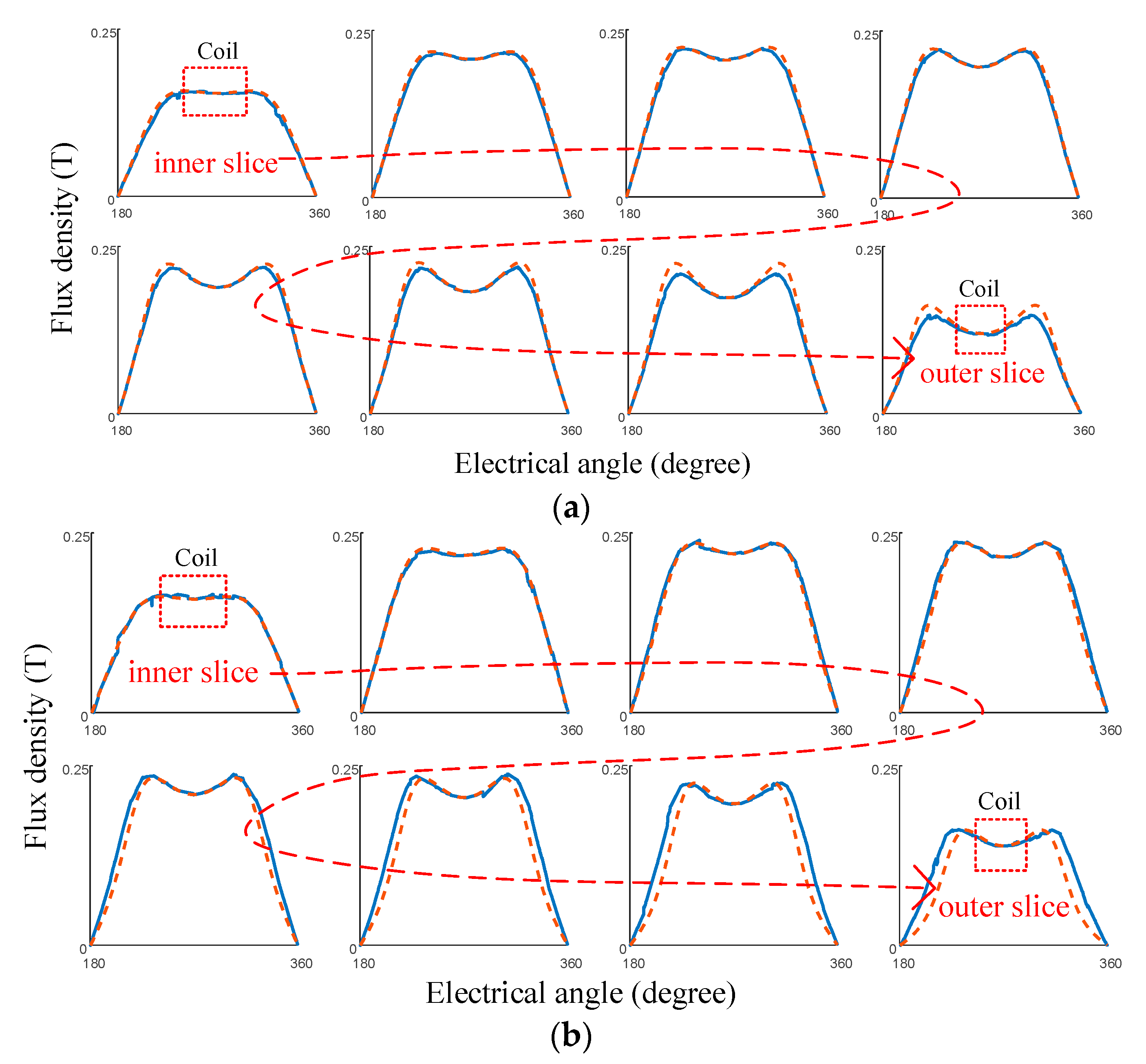
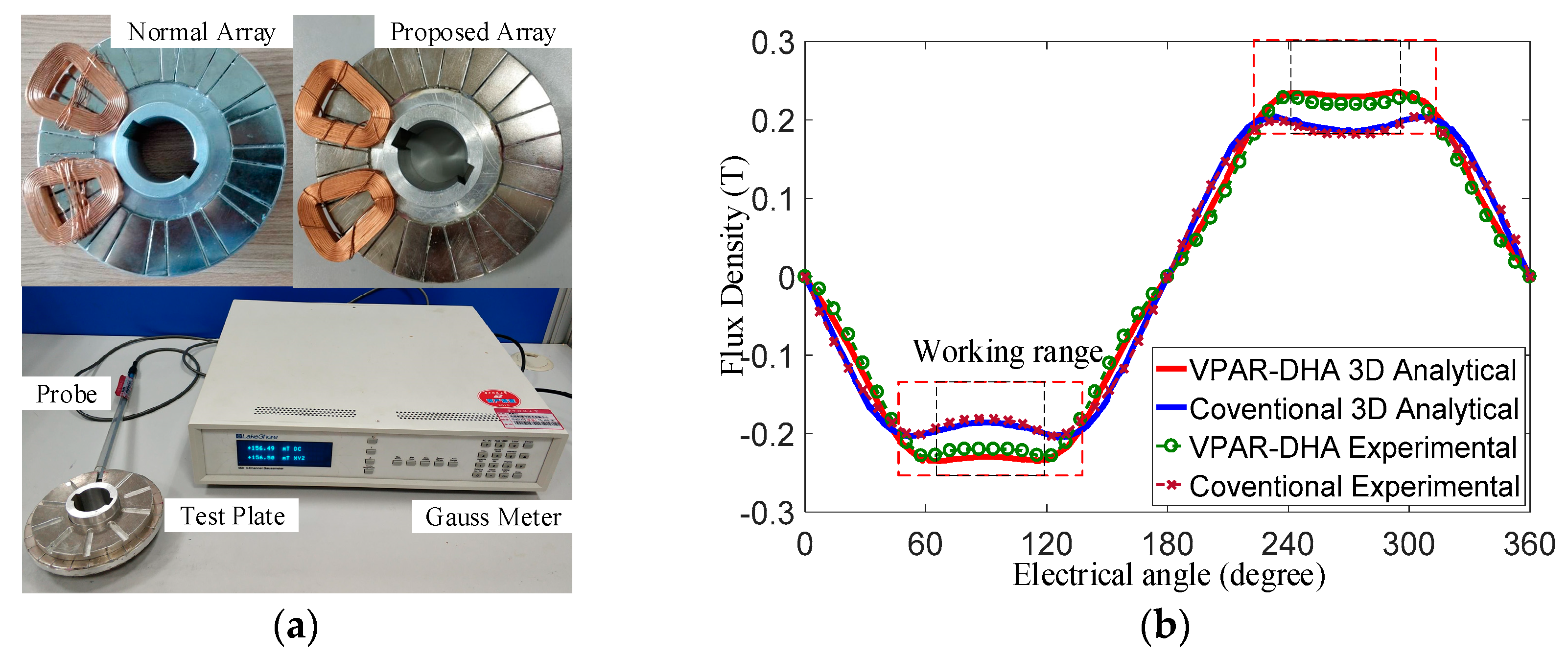
The proposed VPAR-DHAs used in the prototype were built according to the optimized structural parameters, and the magnetic flux density distribution in the middle slice at a gap length of 4 mm was measured with the Gauss meter Lakeshore 410, as shown in
Figure 14a. A conventional Halbach array was also built for comparison. The analytical results and experimental results matched well, with a minor measurement error of less than 5%, as shown in
Figure 14b, which proved the validity of the proposed novel magnet array and quasi-3-D modeling method. The flux density within the working range of the proposed array was 10% higher, and more stable than that of the conventional design, which was the same as the FEM analysis results. Minor error was caused by the edge effects of two magnets, assembly error, and measurement error. This would not influence the validity of this design concept.
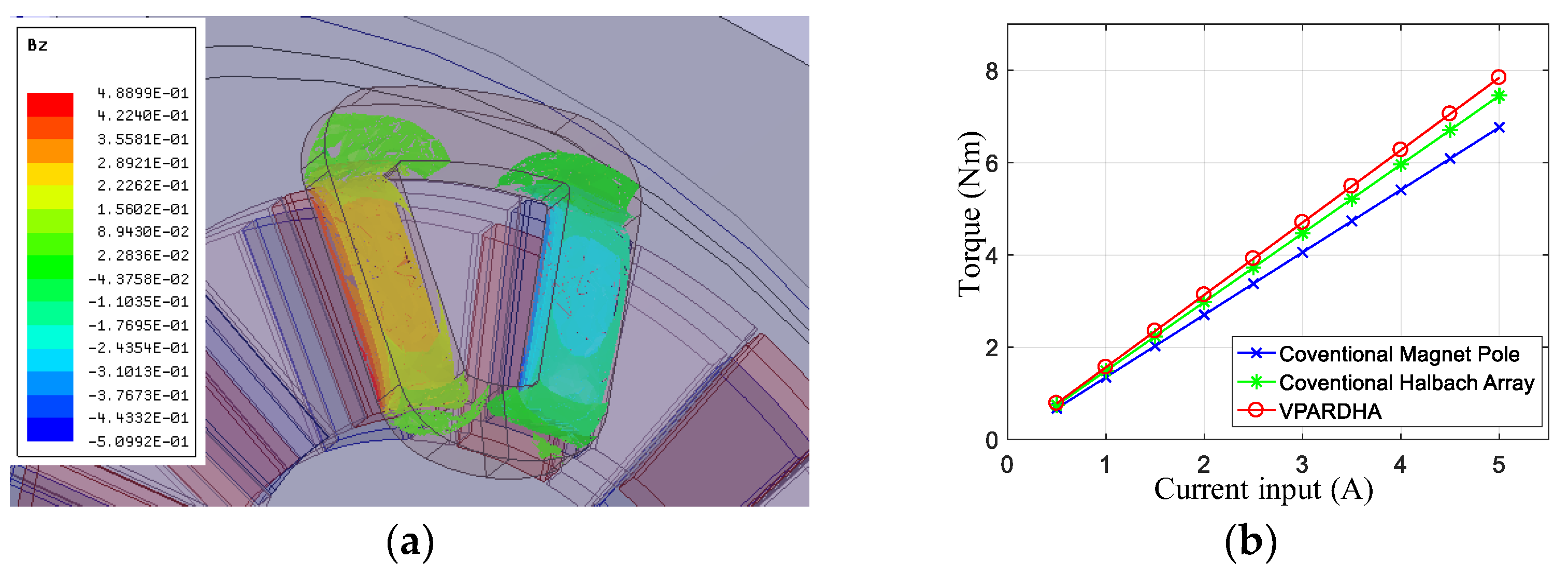
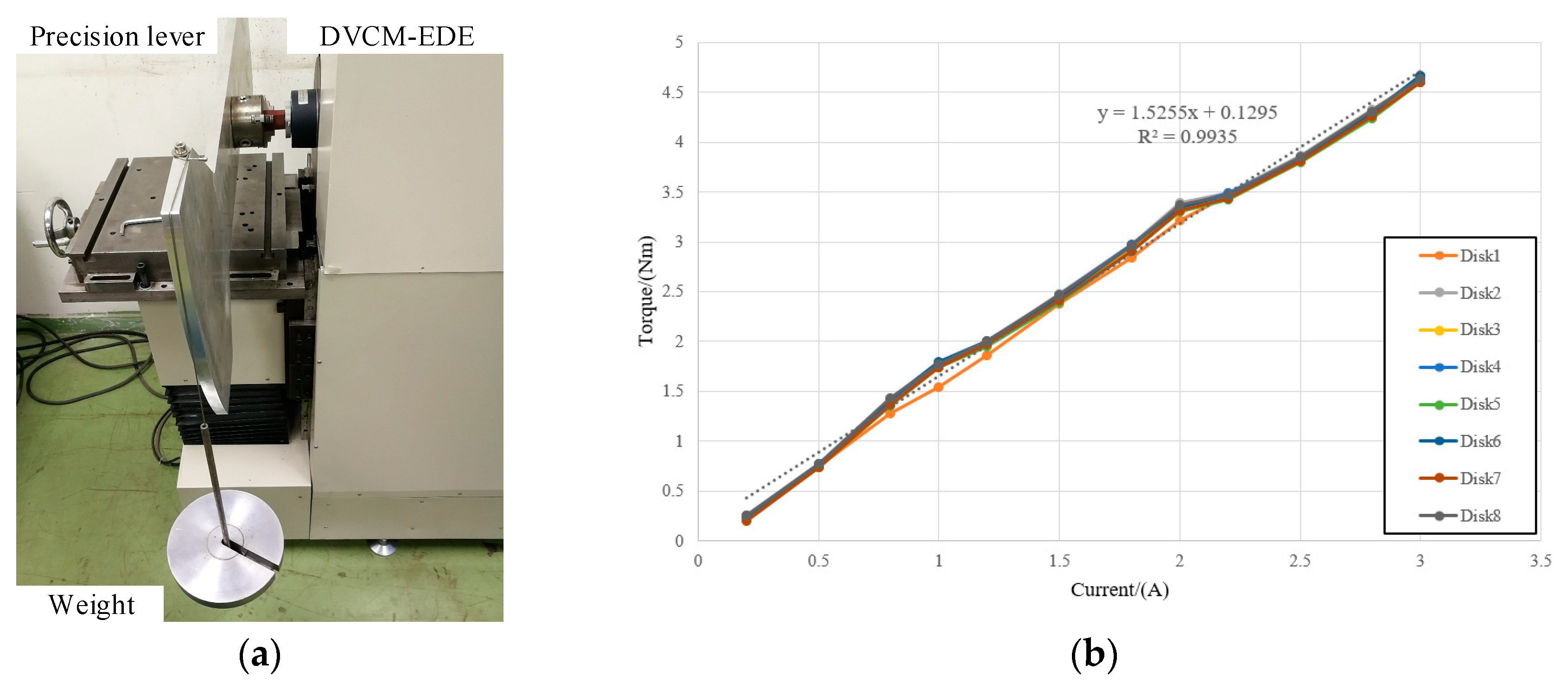
In addition, the static output performance was tested with a precision lever and weights when the coils were energized, as shown in
Figure 14a. The prototype DVCM-EDE consisted of four DVCMs or eight coil disks. The relationship between the output torque and the input current of each disk is depicted in
Figure 15b. The average torque constant of the coil disks was about 1.5255 Nm/A, which fit the FEM results well, and the minimum R
2 value of the fitting curves was 0.9935. This demonstrated that the torque had an almost linear relation to current, which proved that severe saturation was very small in the magnetic circuit. Thus, stable torque could be achieved, and the controlled model was meanwhile simplified.
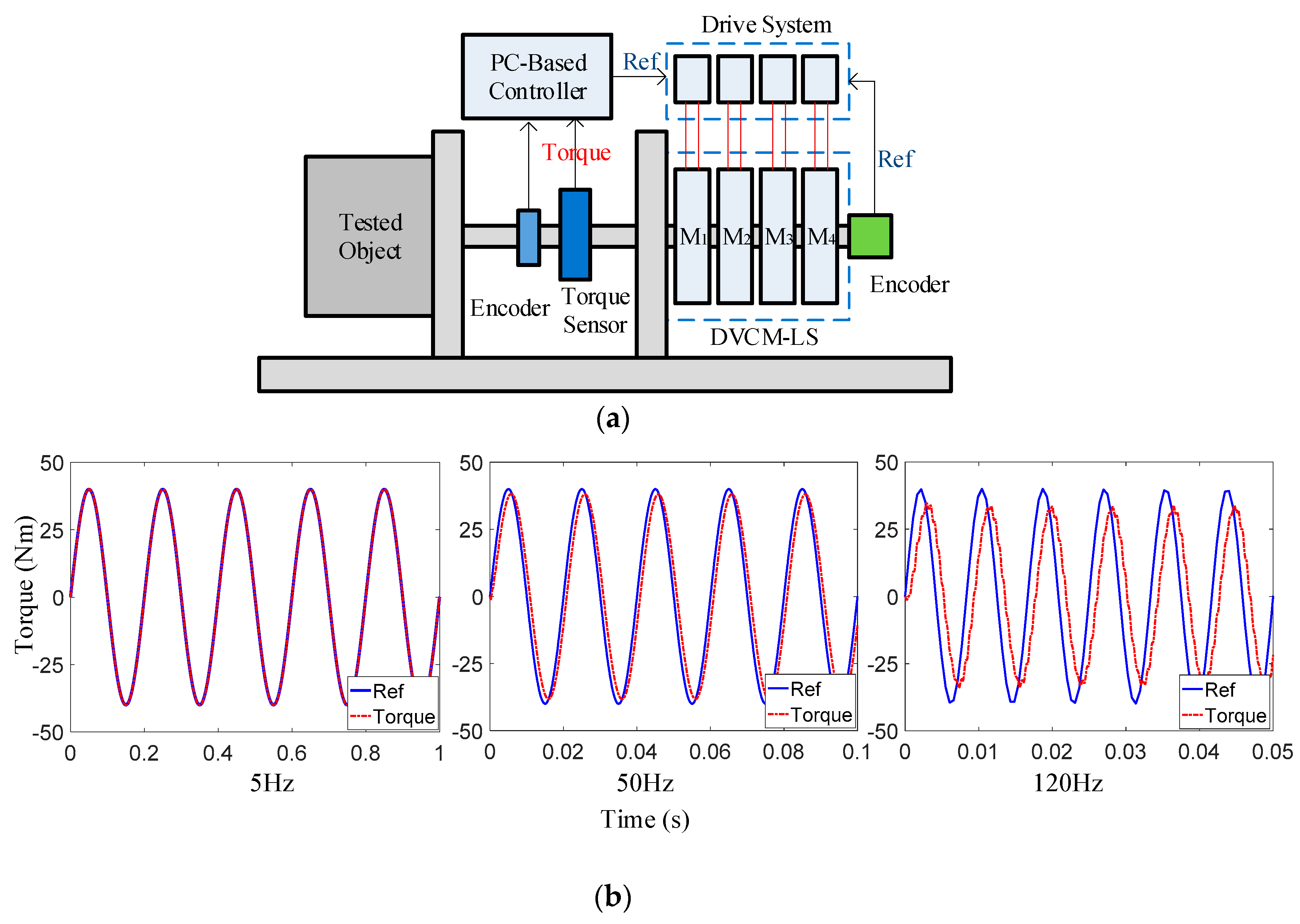
The system construct of the prototype is shown in
Figure 16a. Each DVCM was driven by an individual DC driver, controlled by a PC-based controller. The exciter worked at two modes: When testing the flexible object, it operated at a feedforward synchronous control method based on the CAN bus, according to its positional reference; while testing rigid objects, it realized the load torque closed-loop synchronous control with the torque sensor. The dynamic tracking responses of the prototype at a representatively low frequency (5 Hz, which is the servo bandwidth of many rotating machinery systems, such as industrial robots), mid-level frequency (50 Hz, which is also near the structural frequency of most rotating machinery systems), and high frequency (120 Hz, which is the performance limitation of the prototype) with a stroke of ±1° and peak dynamic torque 40 Nm, are evaluated in
Figure 16b. As the dynamic performances of the prototype gradually changed with the increase of loading frequency, it shows that the DVCM-EDE had a good response of up to 120 Hz, with an amplitude reduction of less than 10%, and a phase lag of less than
, which proved the high dynamic characteristics of the proposed exciter in high-frequency applications. For dynamic torsional stiffness test, as the dynamic angular displacement
and the dynamic loading torque
were directly acquired with the encoder and torque sensor for the calculation of the test results, the small phase lag of
to reference the signal would not influence the measurement accuracy.
5. Conclusions
In this paper, we proposed a VPAR-DHA structure for the design of a multi-module DVCM-EDE used in the high-bandwidth dynamic torsional stiffness test. Compared to the conventional Halbach array, the proposed structure presented a torque promotion of 7% without the increase of rotor inertia. Thus, the dynamic response could be obviously enhanced for high-frequency applications. For fast analysis and the optimization of the electromagnetic structure, a quasi-3-D modeling method was introduced, with end-effects considered by the correction function. Based on the proposed design, prototype experiments were conducted, including flux density and output torque. The DVCM-EDE prototype had a constant torque ratio over its working range, rapid dynamic response, and easy mounting oscillating capability, which proved the effectiveness of this novel structure. Since this paper focuses on the PM array structure optimization, there is still plenty of room to optimize the stator and cooling method. In the future, we will improve the stator structure and the cooling system for a higher performance for the DVCM-EDE, and more convenient assembly.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}