Automatic Individual Pig Detection and Tracking in Pig Farms




1
Laboratory of Vision Engineering, School of Computer Science, University of Lincoln, Brayford Pool, Lincoln LN6 7TS, UK
2
Animal welfare epidemiology Lab, Faculty of Biological Sciences, University of Leeds, Leeds LS2 9JT, UK
*
Author to whom correspondence should be addressed.
Sensors 2019, 19(5), 1188; https://doi.org/10.3390/s19051188
Submission received: 11 February 2019
/
Revised: 1 March 2019
/
Accepted: 4 March 2019
/
Published: 8 March 2019
(This article belongs to the Section Physical Sensors)
Abstract
:Individual pig detection and tracking is an important requirement in many video-based pig monitoring applications. However, it still remains a challenging task in complex scenes, due to problems of light fluctuation, similar appearances of pigs, shape deformations, and occlusions. In order to tackle these problems, we propose a robust on-line multiple pig detection and tracking method which does not require manual marking or physical identification of the pigs and works under both daylight and infrared (nighttime) light conditions. Our method couples a CNN-based detector and a correlation filter-based tracker via a novel hierarchical data association algorithm. In our method, the detector gains the best accuracy/speed trade-off by using the features derived from multiple layers at different scales in a one-stage prediction network. We define a tag-box for each pig as the tracking target, from which features with a more local scope are extracted for learning, and the multiple object tracking is conducted in a key-points tracking manner using learned correlation filters. Under challenging conditions, the tracking failures are modelled based on the relations between responses of the detector and tracker, and the data association algorithm allows the detection hypotheses to be refined; meanwhile the drifted tracks can be corrected by probing the tracking failures followed by the re-initialization of tracking. As a result, the optimal tracklets can sequentially grow with on-line refined detections, and tracking fragments are correctly integrated into respective tracks while keeping the original identifications. Experiments with a dataset captured from a commercial farm show that our method can robustly detect and track multiple pigs under challenging conditions. The promising performance of the proposed method also demonstrates the feasibility of long-term individual pig tracking in a complex environment and thus promises commercial potential.
1. Introduction
Pork is the world’s most consumed meat product, with over one billion pigs farmed globally each year, producing over 110 million tons of meat (USDA, 2018). Monitoring pig health is crucial for both productivity and welfare, but can be challenging given the large scale of many farms. Current surveillance methods of pig disease and behavior in the UK often involve human observation, either as daily checks by farm staff or more in depth quarterly veterinary assessments. This practice is not only time consuming, but may result in inaccurate observations, given that animals are known to change or cease the behaviour of interest in the presence of a human observer [1,2,3]. It is almost impossible to observe animals on a continuous and individual basis using just human observers, and this is even more the case on a commercial farm. Moreover, each separate observer may have a bias in how they interpret behaviours or clinical signs, leading to a potentially unreliable representation of individual and pen-level activity [4]. In addition, many declines in health begin with a change in activity level and/or a decrease in food and water consumption (e.g., endemic diarrhoea, bursitis, lameness, and porcine reproductive and respiratory syndrome (PRRS)) [5]; signs which are difficult to spot in a brief ‘snapshot’ visit to a pen. In some cases, it is challenging to manually identify illnesses which can take effect very quickly. For example, conditions of the nervous system, such as meningitis or bowel oedema, may develop from an unnoticed case to the onset of body convulsions and death within 4 h [5]. The swift development of such conditions means that the critical time point for disease identification may fall between inspection times. The ability to automatically detect and track the movement of individual pigs over an extended period could therefore aid in the early detection of potential health or welfare problems without the need for human observation.
Several studies have already begun to use automatic surveillance techniques to observe pig behaviour. For example, there has been success with the use of RFID ear tags in monitoring pig movement [6]. However, due to the large number of (passive or active) RFID readers and tags needed, the utility of RFIDs, especially active RFIDs, are compromised as an expensive surveillance option. The attachment and detachment of tags also entails additional labour costs. For these reasons, tagging is not routinely applied on commercial farms. A more promising solution for pig monitoring is using camera-based computer vision techniques, as such approaches provide a low cost, non-invasive and non-attached solution. Three dimensional video cameras (top view with depth sensors) have been used to monitor pigs in several studies [7,8,9,10]. The point clouds from depth sensors are processed and analysed to detect and track pigs. However, the accuracy of pig detection and tracking using depth sensors is sensitive to the quality of the depth images, and given the performance limitations of existing depth sensors (e.g., Kinect), good depth images can only be captured over a limited range and field of view, this in turn could complicate the sensor installation on a large-scale farm. The more conventional 2D gray/colour video camera is the most commonly used solution in many video surveillance systems.
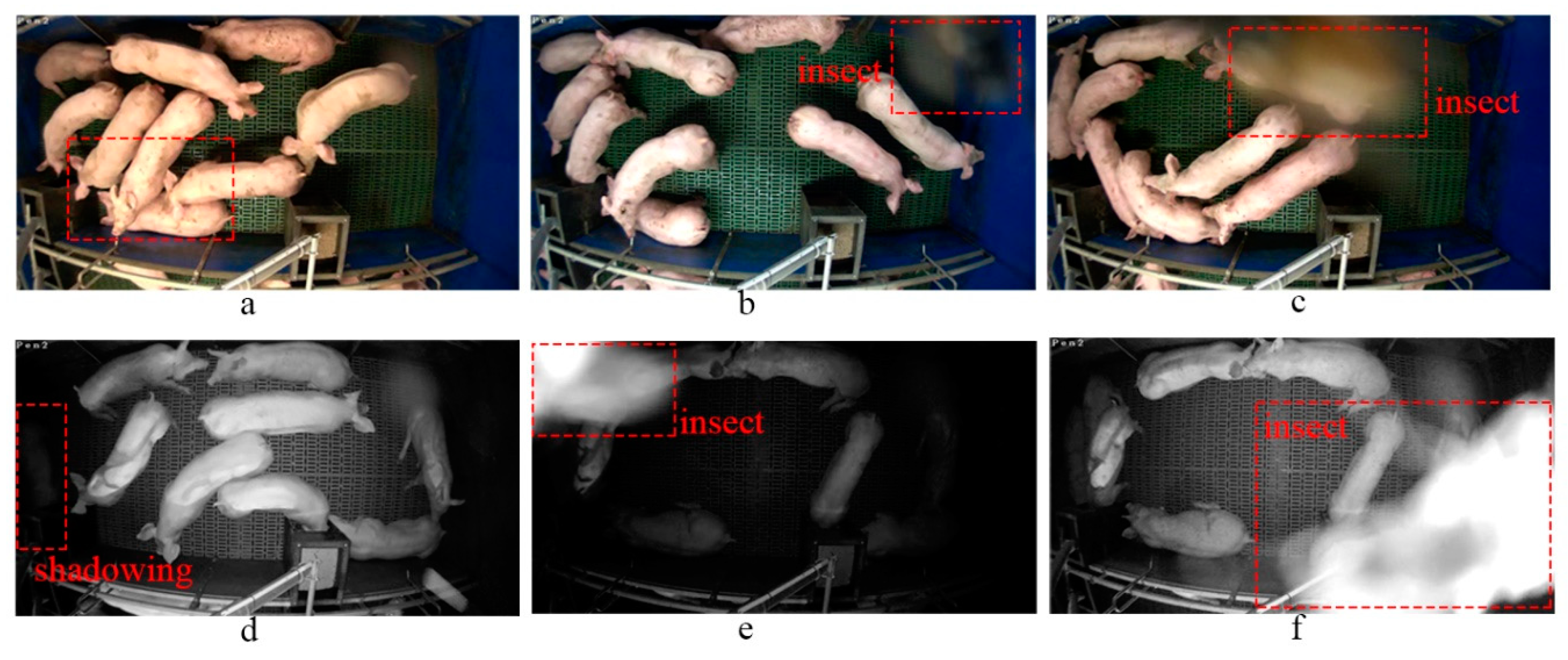
Over the past 20 years, a few 2D video camera-based pig segmentation/detection and tracking methods have been developed. For example, some state-of-the-art image processing techniques such as GMM-based background subtraction [11,12], denoising using low-pass filtering followed by Otsu’s thresholding, morphological operations and ellipse fitting [13,14,15], graphical module-based segmentation [16], and learning-based tracking [17] have been applied. However, most of these 3D/2D camera-based vision approaches for pig monitoring have not been discussed in relation to problematic scenarios and practical difficulties in a harsh environment on a real-world commercial farm. There are three major problems with video-based detection and tracking of individual pigs (see Figure 1): (1) light fluctuation. e.g., sudden light changes frequently occur in the pig sheds, including different illuminations during day and night (light-on and light off) that can trigger a change in the camera imaging model (e.g., from Figure 1a under the normal model to Figure 1d under IR model). This creates unavoidable shadowing in the different light conditions (Figure 1d). (2) Very similar appearances of pigs and varying statuses of the background. (3) Object deformations and occlusions e.g., insect transitorily occludes the lens (Figure 1c,f) and pigs crowd together and occlude each other (Figure 1a–c,e). In this last case, despite individual pig detection and tracking being considered an essential stage in many video-based pig monitoring applications, developing a system that can cope with these conditions remains an open challenge.
To tackle these problems, we present a 2D video camera-based method to automatically detect and track individual pigs in an indoor shed, without the need to manually mark or physically identify pigs. The system works on both colour video and grayscale video under daylight and IR light conditions, respectively, which also has the capability of tackling occlusion problems caused by insects and pigs. Unlike previous attempts to detect pigs (group level or individual level) using traditional image processing algorithms (e.g., GMM background subtraction and thresholding method), the hierarchical features derived from a deep learning architecture are used to detect each pig in the pen. We focus on investigating the features of the foreground objects (pigs) rather than the background, given the varying status of the background in different farming systems (e.g., slatted floors and straw-based systems). Given the visual similarities of pig appearances in the captured footage from top-view cameras, it is difficult to extract an intrinsic feature to identify each pig (e.g., using face recognition techniques). In our method, individual pig detection is defined as a multiple object detection problem while fully considering complicated scenes. The fundamental idea in multiple pig tracking is to continuously update a model for each pig using discriminative correlation filters [18]. In order to tackle the occlusion problem that could result in incorrect detections and therefore cause tracking failure, we propose a data association algorithm to complementarily bridge the detection and tracking processes based on the contextual cues in sequential frames. To the best of our knowledge, no attempt has been made to detect and track individual pigs in such complicated scenes, and this is the first attempt of using deep learning methods for pig detection and tracking at an individual level.
The remainder of this paper is organised as follows. Section 2 reviews previous automatic vision-based pig detection and tracking methods. The proposed methods are presented in Section 3. Section 4 reports on our experimental results. Further discussion is presented in Section 5. We conclude the paper in the final section.
2. Related Work
In the past 20 years, several methods using 2D video cameras have been introduced for detecting and tracking pigs. For example, McFarlane et al. [13] proposed a piglet segmentation and tracking algorithm. The segmentation method was a combination of image differencing with respect to a median background and a Laplacian operator, and during the tracking, each piglet was modelled by an ellipse which is calculated from the blob edges in the segmented image. The major problem in segmentation is the limitation of distinguishing tightly grouped piglets, which leads to tracking errors. Moreover, large, sudden movements of the piglets could cause tracking failure. Kashiha et al. [14] proposed an automated method to identify marked pigs in a pen using pattern recognition techniques. The pigs were firstly segmented from the image by denoising the image using a 2D Gaussian filter followed by Otsu’s thresholding. Then the marks on the pigs were extracted within a similar segmentation manner, which was further used to identify the pattern based on a Fourier description. This method requires the pigs to be individually marked, which is not always practical on a commercial scale. Moreover, the major problem of this method is that paint patterns will fade out over time, meanwhile the movements of pig could result in unclear paint patterns, and in some conditions (e.g., light-off or night environment), the marks become invisible. A study in the literature [15] investigated the change in group lying behaviour of pigs related to changing environmental temperature. The Otsu’s segmentation, morphological operations and ellipse fitting were used to segment the pigs from the background, and the Delaunay triangulation method was employed to analyse the group behaviour of pigs. Nilsson et al. [19] proposed a learning-based pig segmentation method to measure the proportion of pigs located in different areas. Several state-of-the-art features were extracted from the image to feed into a logistic regression solver using elastic net regularization. A typical failure case using this method is due to the occlusions in the pen (e.g., occlusions by the wall and pigs occluding each other to some degree). Ahrendt et al. [17] developed an individual pig tracking algorithm in loose-housed stables. The tracking algorithm consists of two stages: preliminary pig segments are firstly generated using background subtraction followed by thresholding, then the spatial and RGB information derived from the pig segments in a frame are used to build up a five-dimensional Gaussian model for each individual pig. The major limitation of this method is that the tracking could be lost if the movements of the pigs are rapid, and also when occlusion occurs among pigs. Tu et al. [16] proposed a pig detection algorithm in grey-scale video footage, where the pigs are detected by foreground object segmentation. The method consists of three stages, in the first stage the texture information is integrated to update background modelling, in the second stage, pseudo-wavelet coefficients are calculated, which are further used in the final stage to approximate a probability map using a factor graph with a second-order neighbourhood system and loopy belief propagation (BP) algorithm. The disadvantage of this method is the considerable high computational complexity due to using factor graphs and a BP algorithm. In the literature [11], the Gaussian Mixture model (GMM)-based background subtraction method [20] is used to detect moving pigs under windowless and 24-h light-on conditions. However, it is augured that the GMM background is time-consuming. In order to overcome this problem of traditional GMM, Li et al. [12] proposed an improved algorithm based on an adaptive Gaussian mixture model for pig detection, where the Gaussian distribution is scanned once every m frames and the excessive Gaussian distribution is detected to improve the convergence speed of the model. The major problem of this method is that the detection could fail when sudden lighting changes occurred.
Recently, 3D video cameras (top-view based depth sensor) have been used to monitor pigs in several studies [7,8,9,10]. For example, Kulikov et al. [7] proposed a 3D imaging sensor-based method to automatically track piglets in a field test, in which several Microsoft Kinect 3D image sensors and 3D image reconstruction using EthoStudio software were adopted. Another proposed system [8] assessed the normal walking patterns of pigs, tracking the trajectories using a six-camera Vicon system with reflective markers [21] and a Microsoft Kinect camera. Kim et al. [9] proposed a method to detect standing pigs using a Kinect camera, in which the temporal noise in the depth images is removed by applying spatiotemporal interpolation, then detection is achieved by applying edge detection based on the undefined depth values around pigs. Matthews et al. [10] proposed an individual pig detection and tracking method based on the depth maps generated from a Kinect camera, whereby a region-growing approach is applied on the pre-processed images (with calibration, noise removal and surface normalization) to detect the pigs and tracking is implemented by linking detection in adjacent frames using the Hungarian Assignment algorithm. Although existing depth video camera-based vision systems have achieved some successes in pig detection and tracking, they tend to have certain drawbacks due to the limitation of the imaging sensor (e.g., Kinect depth camera has limited range (4 m) and field of view (horizontal 58.5° and vertical 45.6°)), and the accuracy of depth data is sensitive to the camera position. This, in turn, complicates device installation for large-scale commercial agricultural application. Furthermore, due to the variety of the shed or pen sizes in different commercial farms, this physical limitation of the depth sensor could significantly reduce the system generalization. In addition, regardless of noise in the point clouds, a 3D top-view sensor cannot address the occlusion problem.
In this study, we focus only on 2D camera-based applications related to detection and tracking of individual pigs.
3. Methods
3.1. Method Overview
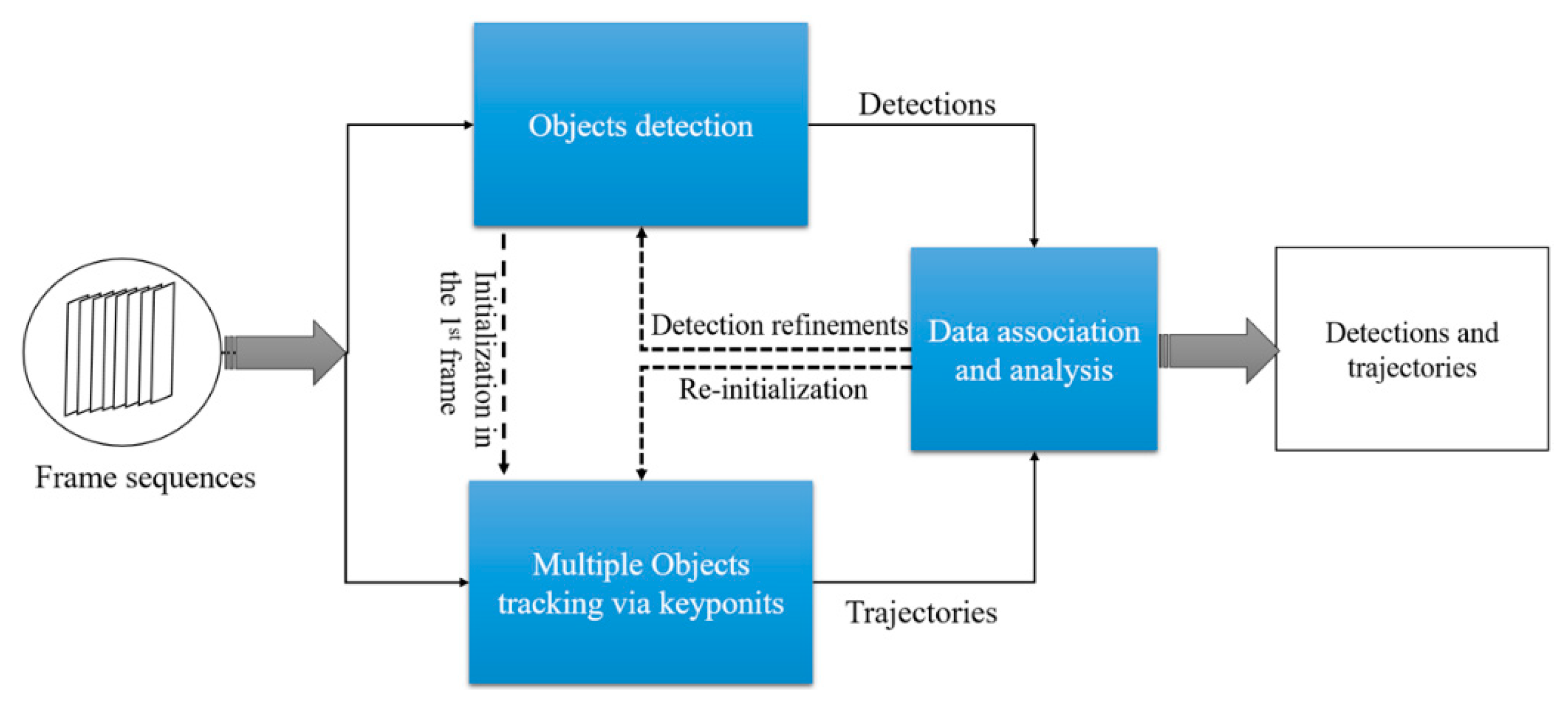
We first present a brief overview of our proposed method. Figure 2. shows a block diagram of the method, which consists of three main components: object detection, multiple object tracking and data association.
In object detection, the detector works independently on each individual frame to localize the areas that appear similar to the training samples. In many object detection pipelines, the key task is to extract representative features from the foreground (objects), which tends to make it more reliable in dealing with illumination variation and occlusion compared to background subtraction. In the multiple object tracking process, each object in the scene is assigned a unique ID; the tracker predicts the motions of all object instances between consecutive frames and uses the same unique ID for each object throughout its appearance in the scene. Given the complicated pen environment in commercial farms, both the detector and tracker may fail in a video sequence. For instance, the false positives and false negatives may appear in detections while the trajectories of object instances can be fragmented or interrupted during the tracking. The data association process is used to refine the detections based on temporal context and to form robust trajectories for each object instance under the assumption that the object motions between the adjacent frames are limited. It also allows the detection and tracking to work in a complementary manner. When a large tracking error is detected (e.g., the objects are invisible due to an occlusion), the system will automatically trigger the re-initialization of tracking obtained from the detector. By this data association, both the detector and tracker are coupled to predict accurate object bounding boxes with more coherent trajectories.
3.2. CNN Based Object Detection
Object detection is a crucial middle level task in computer vision which facilitates high level tasks such as action recognition and behavioural analysis. It is also a prerequisite stage to ‘tracking by detection’ based object tracking methods. Since convolutional neural networks (CNN) were introduced into the object detection community, due to their relatively superior performances compared to the traditional hand-crafted features-based detectors, CNN-based object detection has received considerable attention, and a great deal of progress has been made in recent years. Current state-of-the-art CNN based object detection methods [22,23,24,25] mostly follow the pioneering work of the R-CNN [26]. The CNN network in the R-CNN can be considered as a feature extractor, working on the regions which are cropped from an input image by some external region processes (e.g., selective search [27]). Classification and localization are solved by a support vector machine (SVM) classifier and a class-specific bonding box (BB) regression. However, R-CNNs are slow because each region proposal needs to go through a CNN forward pass, where overlapping Regions of Interest (RoIs) proposals lead to significant duplicated computation. The problem is mitigated in the Fast R-CNN architecture [22], which takes the entire image once through the network to obtain a feature map. Then, for each region proposal, a RoI pooling layer extracts fixed resolution regional features from the feature map. A multi-task loss, L, which is a combination of classification and regression loss is used to train each labeled RoI:
where, each training RoI is labeled with a truth class c ∈ 0, 1, 2, …, K over K + 1 classes, and c = 0 indicates background, and a ground-truth bounding box regression target g associated with the class c. p = (p0, …, pk) is the predicted probability distribution for each RoI computed by the soft-max. tc denotes the predicted bounding box regression offsets for class c over the K classes, which is represented by the four parameterised coordinates of the predicted bounding box. The parameterization of these four coordinates follows the work of Reference [26]. The f(c) is an Iverson bracket indicator function [c ≥ 1], f(x) = 1 if c ≥ 1 and f(x) = 0 otherwise. Lclass(p,c) and lreg(tc,t) are the classification loss and regression loss, respectively, where the Lclass(p,c) = −logpc is the log loss for ground truth class c, and lreg(tc,t) is expressed by
In which, the is the robust smooth L1 loss function defined as if , otherwise . The classification and bounding box regression are balanced via the parameter and .
Both R-CNN and Fast R-CNN require an external initial RoI proposal paradigm that prevents the network from being trained in an end-to-end manner. Moreover, these CNN-based detection methods, which rely on a specified external RoI, are not efficient enough to satisfy many vision applications. The follow-up work on Faster R-CNN [24] is much more efficient than the Fast R-CNN, this is mainly from the Regional proposal network (RPN) which generates initial RoI regions for subsequent learning. The Faster R-CNN has two main stages to train: In the first stage, the features extracted by a feed-forward CNN at an intermediate level are used to generate RoI proposals. The RoI proposals are generated using a sliding window on the feature map at different scales and aspect radios that act as ‘anchors’. The term ‘anchors’ is also functionally identical to the ‘default box’ in other related work [25]. In the second stage, the box proposals along with the intermediate feature map generated in the RoI proposal stage are fed to train a weight sum of classification loss and bounding box regression loss. The loss functions in both stages take the form of Equation (1).
Although the Faster R-CNN has shown remarkable accuracy of detection, it is still far from being a real-time system. This motivated improvements in the detection speed while maintaining the detection accuracy in the follow up work on Region-based Fully Convolutional Networks (R-FCN) [23] and Single Shot Multibox Detector (SSD) [25]. The R-FCN has a similar architecture compared to the Faster R-CNN, which consists of a region proposal stage, class prediction stage and bounding box regression stage. It improves the efficiency of detection by reducing the computations in each region. This is achieved by extracting per-region features in the feature map generated from the deeper (upper) layer which is prior to the predictions, rather than on the feature map derived from the RPN. The SSD is the fastest architecture among these state-of-the-art architectures while it has competitive detection accuracy compared to the Faster R-CNN and R-FCN. The SSD uses a single feed-forward CNN to directly predict a set of anchor (default) boxes and the confidence of presence of an object class in those boxes. The improvement in speed results from using the RPN-like network only for predictions without requiring an additional second stage per-region pixel or feature resampling operations.
3.3. Pig Detection Using SSD
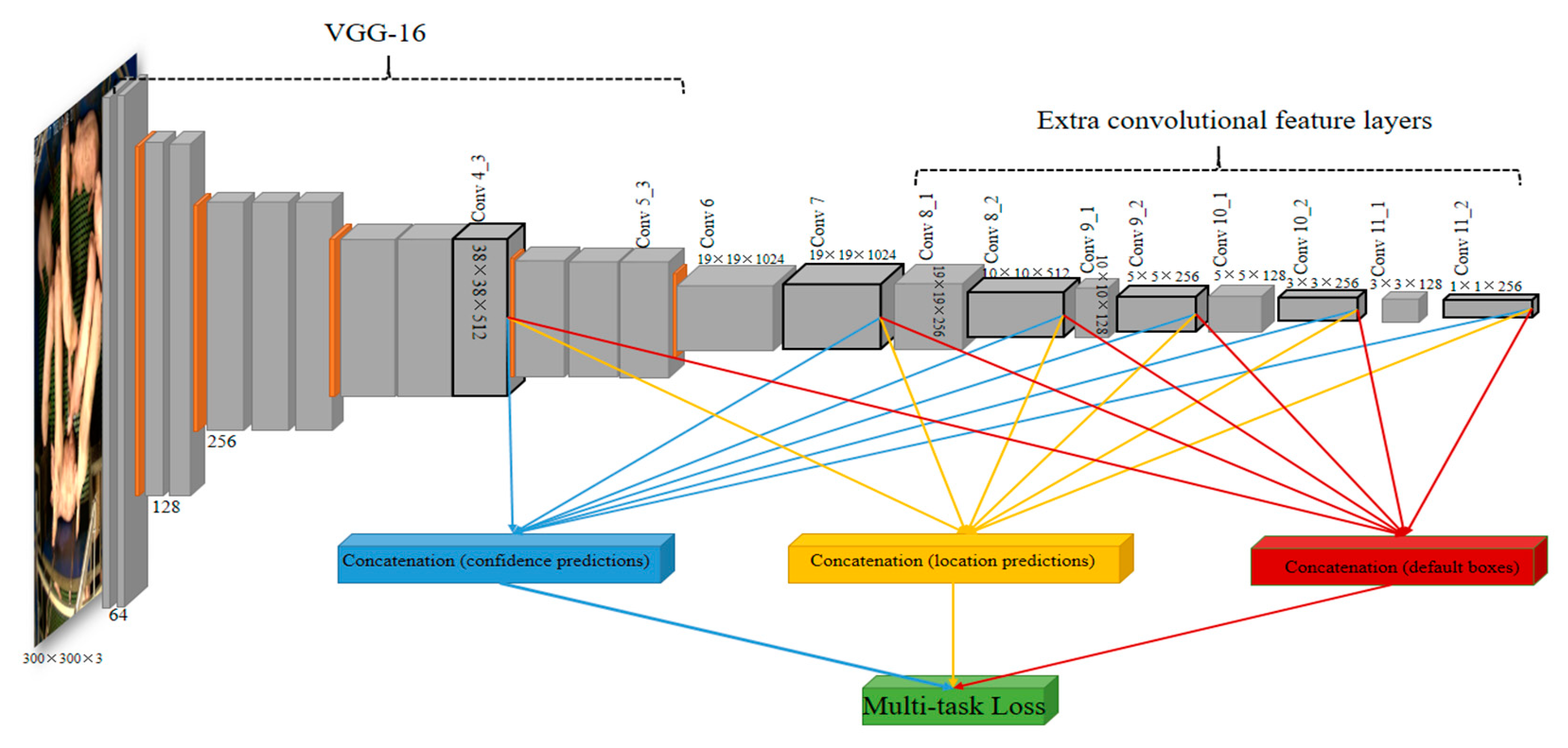
In this paper, we implemented and compared the Faster R-CNN, R-FCN and SSD for pig detection, and adopted the SSD architecture [25] with a modified loss function as the detector (Figure 2). Figure 3 shows the overall architecture of the SSD network.
The overall network consists of two parts: the front truncated backbone network (VGG-16) which is an image classification network (including layers: Conv1_1, Conv1_2 …, Conv4_3 … Conv5_3) and the additional convolutional feature layers (Conv8_1, Conv8_2 … Conv11_1, Conv11_2) which progressively decrease in size. It is different from the RPN in that multiple feature maps from upper (including added feature layers Conv7, Conv8_2, Conv9_2, Conv10_2, Conv10_2 in Figure 3) and lower layers (Conv4_3) form a single network used for default box generation as well as confidence and location predictions. More specifically, a set of default boxes (anchors) are tiled with a convolution manner at different scales and aspect ratios for these feature maps. Given the number of f feature maps, the scale of the default boxes for each feature map is computed as:
where Smin and Smax denote the scales in the lowest layer and highest layer, and the scales of all the other layers in between are increased by a constant factor. A set of default boxes with k different aspect ratios (e.g., 1, 2, 3, 1/2, 1/3) are associated with each grid on each feature map. For example, given a feature map with a size of m × n, in which each grid is located k = 6 or k = 4 default boxes, there are m × n × k default boxes for this feature map. Therefore, there are a total of 8732 default boxes for all feature maps (see Figure 3). Meanwhile, two separate sets of small convolutional filters (3 × 3) are applied to each feature map to produce confidence and location predictions (bounding boxes offsets related to default boxes), respectively. The outputs (location predictions, confidence predictions and default box coordinates) generated from different feature layers are then concatenated separately, and subsequently fed to the Multi-task Loss unit.
During training, a two-stage matching strategy is first applied to generate positive and negative default boxes for subsequent learning. Matching a GT box to the closest default box is based on the maximum Jaccard distance overlap followed by matching default boxes to the GT box with a Jaccard distance overlap higher than a threshold of 0.5. If such a match can be found, it is considered a positive default box, otherwise, it is termed a negative default box. Therefore, matching in this many-to-one manner, each GT box could have multiple positive default box samples. Meanwhile, hard negative mining is used to balance the positive and negative default boxes to the ratio of 1:3. This should prevent an imbalanced classes learning problem and makes the network more convergent. The model is trained by minimizing an objective function, which is a mixed classification and regression loss function. In our experiment, given the scenario that the desired detection objects (pigs) are pre-determined, only two classes (pig-object and background) need to be predicted. Therefore, our loss function for an image is defined as:
where N is the number of matched default boxes and denotes the probability of the ith default box in an image predicted as an object. is the corresponding ground-truth label: If the default box is positive = 1, otherwise = 0 if the default box is negative. and are the predicted box parameters and ground truth box parameters. Instead of using softmaxloss as the confidence loss function for multiple classes classification, we define the as log loss over two classes (pig and background). For the regression loss, we adopted the same smooth L1 loss function defined in Equation (2).
3.4. Individual Pig Tracking Using Correlation Filter
Multiple object tracking (MOT) is the task of discovering multiple objects and estimating the trajectory of each target in a scene. In general, a MOT method can be categorized as on-line or offline tracking. The difference between these two is that the on-line tracking requires only the information from past frames when inferring states of objects in the current frame while the offline tracking requires additional information in the future frames for the inference in the current frame. Given the on-line nature of the surveillance system, the on-line tracking manner is appropriate for our task. In this paper, given sequential frames for individual pig tracking, let be the state of the ith pig in the tth frame, and let be all states of N pigs in the tth frame. For each pig in the video, the sequential states of the ith pig are denoted by . Thus, denotes all the sequential states of all pigs in a video. The objective of the individual pig tracking is to find the optimal sequential states of all N pigs by various learning-based methods based on the existing training samples. In our method, the Discriminative Correlation Filters (DCF) based on the on-line tracking method [28] is adopted to track each pig.
The DCF has shown its advances in object tracking in recent years. Since the MOSSE [29] was first introduced for adaptive tracking using DCF, a series of improvements [28,30,31] have been made to this tracker to achieve more accurate, robust and efficient tracking. These methods learn a continuous multiple channel convolution filter from a set of training samples which are collected from the past (e.g., 1:t − 1th) frames. The object is tracked by correlating the learned filter over a search window in the current (tth) frame, where the location has maximal responses to the filter indicates the new position. Benefited from periodic assumption of the training samples, the training and prediction are efficient in the frequency domain by applying the Fast Fourier Transform (FFT). Formally, given M training samples , each sample xj consists of D feature maps (x1j, x2j, …, xDj) extracted from an image region using one or more object appearance modeling method (such as HOG, colour names and deep CNN features etc.), of which each xdj has an independent resolution. A set of convolution filters f = (f1, f2, …, fD) is trained to predict the confidence scores of the target, and the target is localized by maximizing the
where indicates the convolution operator. In order to fuse the multiple-resolution feature maps in the tracking, the feature map is transferred to the continuous spatial domain by an implicit interpolation model given by operator . In the training phase, given a set of M sample pairs , the filters f are learned by minimizing the following objective,
in which, the samples xj are labeled by desired confidence scores yj, defined in the continuous spatial domain, as the periodic repetition of the Gaussian function. indicates the weight for each sample , and the classification error between the of sample and corresponding labels is given by the L2 norm. The additional term in Equation (6) is a spatial regularization component to suppress unwanted boundary effects, where w is a regularization matrix containing weights determining the importance of the filter coefficients. To train the filters, Equation (6) is minimized in the Fourier domain and the filters are iteratively updated by employing a Conjugate gradient (CG) method [31].
In order to speed up individual pig tracking and tackle the occlusion problems in the scene, we follow the improvements [28] based on the aforementioned tracker with three aspects: reducing the number of weights in the trainable filters, reducing the sampling redundancy, and adopting a sparser model updating scheme. The number of weights is reduced by introducing a factored convolution operator given by:
The fd in D-dimensional filters f = (f1, f2, …, fD) in Equation (5) are constructed as a linear combination of a smaller set of basis filters fc in (f1, f2, …, fC) using a set of learned coefficients which is represented as a D × C matrix P = pd,c. Then the feature vector at each location t is multiplied with the matrix PT followed by convolving with the filters to calculate the confidence scores. This results in compacting the D-dimensional filter to C-dimensional filter, which thus reduces the model size and improves the efficiency of tracking. During the training, the filter f and matrix P are learned jointly via Gauss–Newton and the conjugate gradient method.
In the sampling stage, instead of constructing a sample set containing M samples by collecting a new sample in each frame, the sample set is constructed based on the joint probability distribution p(x,y) of the sample feature maps x and the corresponding desired confidence scores y. Assuming the target is centered in its search window of the image, all y scores can be predefined as the same Gaussian function y*; thus, p(x,y) can be approximated by a Gaussian Mixture model (GMM) p(x). The GMM is constructed by a weighted sum of L Gaussian components which is given by:
where is the desired Gaussian mean to each component l, is its weight determined by the learning rate, and the covariance matrix I is set to the identity matrix. The GMM model is updated by adopting the simplified on-line learning algorithm [32]. This GMM sample modeling scheme results in more efficient learning by reducing the number of samples from M to L. Meanwhile it is the variety of the samples that enhances the accuracy of representing the samples. This is a particularly important factor that allows the method to cope with problems related to the deformations and occlusions of pigs. By using GMM, then the objective function in (6) is transformed to the following objective:
In order to further improve the tracking capability of handling the occlusions (e.g., insects) and deformations, the same sparse filters updating scheme [28] is adopted in the learning. Namely, rather than updating the filters in each frame, the filters are updated on a fixed interval of frames and the loss is updated by adding a new component that encodes the features from a set of object varieties. The infrequent updating helps to reduce the over-fitting as well as improves learning stability.
In our scenario, the target is relatively large (see Figure 4) that leads to high computation cost of extracting features and convoluting filters with such large sample. As a result, the efficiency of the tracking will be significantly reduced. Meanwhile, given the similarity of appearances among pigs and the severe overlapping in a pen, the feature with a wider scope (e.g., the entire pig) is not discriminative enough that it could increase tracking drifts under occlusions. Therefore, in our method, we define the target as a portion of the pig body (e.g., the center green box in Figure 4 is named as tag-box) and the aim is to track this tag-box by features extracted in local scope. These targets (tag-box) are tractable based on the key points tracking manner. This benefits from the fact that the aforementioned tracking method with continuous formulation (Equation (5)) enables accurate sub-pixel localization.
3.5. Data Association
In our method, we assume that both the detector and tracker described in the above sections may fail in some environments due to the problem of light fluctuation, similarity of pig appearances, occlusions and deformations. For example, the false positives and false negatives may occur in the detections within different light conditions or occur along with some interferences in the scene; meanwhile, tracking the drift or fragmentation of trajectories may be caused by the occlusions or the similarity of pig appearances. Moreover, due to the fact that the pen is closed and the camera position is fixed, we assume the number of pigs is constant; namely, the pigs in the pen will not leave the scene, and no other pigs will enter the scene. Based on this assumption, in order to improve the robustness of the detection and tracking, especially for long-term tracking of multiple pigs under occlusions, we propose a novel hierarchical data association algorithm to bridge the detector and tracker. The association is formulated as a bipartite graph matching and solved using the Hungarian algorithm [33]. Thus, the MOT problem in our method is treated as a pairwise association by associating detector responses with tracklets, which can recover tracking failures according to the estimated object hypothesis from the detections. In order to recover tracking failures, we need to determine in which condition the object is observed. In our method, the different conditions are expressed by the relation between the detection bounding box and the tag-box of the tracker described above. More specifically, let and which are a set of detection bounding boxes and a set of tag-boxes respectively in the tth frame, where denotes the jth detection bounding box in the tth frame and is the ith tag-box in the tth frame. Four states are defined according to the and ; for the objects under different conditions that could lead to tracking failures, the corresponding responses are triggered and implemented to recover the tracking.
- (1).
- An object is tracked if a contains only one , which means the one-to-one association between the detection bounding boxes and the tag-boxes has been established. (State: tracked)
- (2).
- An object is not currently tracked due to an occlusion if the is not assigned to any existing tracks, namely the tag-box of the tracker is located out of the default detection bounding box . This will trigger a tag-box initialization scheme. (State: tracking drift [tracking target shifts away from the detection bounding box])
- (3).
- Unstable detection occurs if the which is restrained by the is not assigned to any . This will trigger a detection refinement scheme based on the tracklet derived from the historical detections. (State: unstable detection).
- (4).
- If more than one are assigned to a , it means the tag-box with less assignment confidence is drifting to an associated bounding box. This triggers a tag-box pending process followed by the initialization in condition (2). (State: tracking drift)
Given the above four states, in general, the MOT with occlusion problems can be simplified to assess the relations between the detection bounding boxes and tracking tag-boxes. The detector and tracker work in a complementary manner, namely, detection can be refined by the historical tracks which are restrained by the tracked tag-box while the tracking failures can be successfully recovered by reinitializing the tag-box based on the optimal detections. As a result, the optimal tracklets can sequentially grow from a set of stable detections under occlusion conditions.
Algorithm 1 gives a brief outline of our data association method, where step 1, 15 and 24 in the procedure are related to the pairwise associations. More specifically, in algorithm 1, the data association procedure starts from associating between and to assess whether a one-to-one assignment has been established for each pair of and . As a result, the states of the objects can be allocated into either state (1) or one of the states in (2), (3) and (4). To further handle the states (2), (3) and (4), the separate associations are performed based on the assigned detection boxes (), unassigned detection boxes (), unassigned tag-boxes () in the current frame and the historical tracks in the t-lth (l = 1) frame. For state (2) in our method, we adopted a buffer-and-recover strategy to recover the failure tracker with the drifted tag-box by introducing a counter (age), which is used to record the number of frames that state (2) has happened, if the age > 20, we initialize the tag-box based on the corresponding detection. For state (3), the unstable detections are refined by associating detection bounding boxes to the default detection bounding box which is estimated based on the updated tracklet in the previous t-lth (l = 1) frame (e.g., indicates the ith object tracked bounding box in the t − 1 frame). For state (4), the tag-box is pended if a condition that one detection box contains more than one tag-boxes is detected. The pending is performed by temporarily setting the center points of the drifted tag-box to be out of the current spatial coordinates. Thus, during the pending period, state (4) is transferred to be state (2) in the subsequent frames, where a tag-box will be initialized when the counter reaches the threshold.
The association is performed by constructing an association cost matrix between detection bounding boxes and tracking tag-boxes followed by an optimisation process using the Hungarian algorithm to determine optimal matching pairs. The cost function for a pair in the cost matrix is defined as:
where the first overlap term in (10) evaluates the relation between detection and tag-box, and the second term integrates the relative spatial information into the formula. The weight restrains the impact of the second term to the cost. The function d(.) is the Euclidean distance between two boxes’ center points and is the diagonal length of the bounding box . The lower the cost of the function is, the more likely that the affinity of the two boxes is high.
| Algorithm 1 our hierarchical data association algorithm | |
| Input: | Current tth frame and previous trajectories |
| The detection bounding boxes computed from the detector described in Section 3.3 | |
| The tag-boxes computed from the tracker described in Section 3.4 | |
| Output: | bounding boxes and trajectories for the tth frame |
| Procedure | |
| 1 | associate the detection bounding boxes to the tag-boxes |
| 2 | If each in is assigned to the corresponding in with one-to-one manner |
| 3 | Return the as tracked bounding boxes and update the tracklets |
| 4 | else |
| 5 | Update the tracklets related to the and return the assigned detection boxes (), unassigned detection boxes () and unassigned tag-boxes (). |
| 6 | end if |
| 7 | for each tag-box in the unassigned tag-boxes |
| 8 | set a default box () to the tag-box according to the updated tracklets; |
| 9 | associate the unsigned detection boxes () to the default box () |
| 10 | if find a best matched box in the |
| 11 | set the best matched box as the tracked bounding box and update the tracklet |
| 12 | else |
| 13 | set the default box as the tracked bounding box and update the tracklet, |
| 14 | end if |
| 15 | associate the unassigned tag-boxes () to the default box () |
| 16 | if no matched tag-box is founded |
| 17 | set a counter array (age), age[] = age[] + 1 |
| 18 | else |
| 19 | age[] = age[] − 1 |
| 20 | end if |
| 21 | if age[] > threshold value (T) |
| 22 | Initialize the tag-box and reset age[] = 0; |
| 23 | end if |
| 24 | associate the assigned detection boxes () to the unassigned tag-box |
| 25 | if the assigned detection box has more than one tag-boxes |
| 26 | pend the tag-box |
| 27 | end if |
| 28 | end for |
4. Experiments and Results
4.1. Materials and Evaluation Metrics
The dataset used in our experiments was collected from Spen Farm, University of Leeds, UK. Nine finisher pigs (Large White x Landrace breed) were filmed in pens of size 400 cm × 176 cm, with fully-slatted floors. The lighting in the shed is manually operated, with artificial light between the hours of 07:30–16:00 and with additional natural light from two small windows. The footage was continually recorded over 3 days, covering day and night (examples are shown in Figure 1). The frame resolution is 1920 × 1080 pixels and the video was captured with a frame rate of 20 frames/s. We screened the footage to obtain the most representative scenarios for the different conditions described above (e.g., light fluctuation, object deformations and occlusions). In our experiments, there are a total of 18,000 frames for algorithm training and a total of 4200 frames coming from five different sequences for testing. The training and testing samples contained examples of all challenging scenarios. Table 1 summarizes the details of the testing dataset. An expert provided the ground truth by manually annotating the location and identification for each pig in each frame of all training and testing sequences. These annotations were used to train the algorithm and validate the proposed method.
Since the problem of individual pig detection and tracking is a typical MOT problem, we employed standard MOT evaluation metrics [34] with additional metrics (MT PT ML) used in Reference [35] to validate our method. This set of metrics is described in Table 2. Here, ↑ indicates that the performance is better if the number is higher, and ↓ denotes that lower number indicates a better performance.
4.2. Implementation Details
We implemented the individual pig detection and tracking method using Matlab and the MatConvNet CNN library [36] on a PC with configuration: Inter(R) Core(TM) i9-7900x [email protected] GHZ, 32 GB RAM and Geforce GTX 1080Ti GPU. The videos were captured by a Longse-400 IP IR Dome camera powered by POE with a fixed 2.8 mm lens; the codec used was H265 (also known as HEVC).
For the system described in Section 3.1, three CNN detection architectures (Faster-RCNN, R-FCN and SSD) were implemented and compared. The backbone architecture for the three detection networks is VGG16. In the Faster-RCNN and R-FCN, feature maps used to predict region proposals are derived from the conv5_3 in the VGG16 as shown in Figure 3. During the training, in the Faster-RCNN and R-FCN, the networks are trained on input images scaled to M pixels on the shorter edge. In SSD, the input images are resized into a fixed shape with M × M. In our experiment, we set the M = 300. The networks are trained using SGD with a 0.001 initial learning rate, 0.9 momentum and 0.0005 weight decay. The batch size was chosen as 16. For the correlation-based tracker, we adopted the HoG [37] and Colour Names (CN) [38] feature representation to model the appearances for the daytime model sequences, and only HoG was used in the nighttime model sequences due to the nature of the gray scale frames. In the experiment, the cell sizes of the HoG and CN were 6 and 4, respectively. For the factor correlation filter, we used the same number of CG iterations for the filters updating after the first frame. For the sampling strategy, we set the learning rate to 0.09 and the number of components is set to 30. The model is updated every two frames. In the first frame of each sequence, the initial detection bounding boxes are manually delineated and the tag-boxes are initialized to be automatically centered at the bounding boxes. We use 10 Gauss–Newton iterations and 120 CG iterations to optimize the filter coefficients in the first frame. In our experiments, all parameter settings were kept fixed for all sequences in the dataset. In order to optimize the efficiency of our method, the computation of the detections was allocated to the GPU while the tracking was performed on the CPU in a parallel computing manner.
4.3. Experimental Results
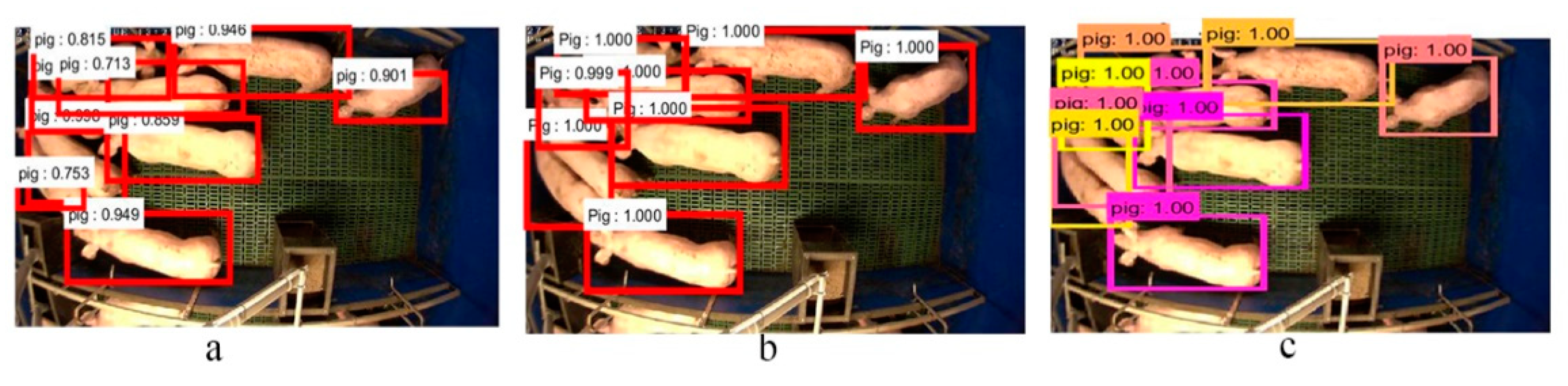
We compared three detection architectures as described in Section 3.2. Figure 5 shows the detection results of these three networks. It can be observed that the SSD has a relatively better detection performance compared to the R-FCN and Faster R-CNN. In Figure 5a, nine pigs are detected from the scene with minor occlusions. However, the detected bounding box for the pig at the periphery of the pen is narrowed. Although this pig is well localized in the Faster-RCNN in Figure 5b, two overlapped pigs on the left side of the pen are improperly detected to one pig. This results in only eight pigs being detected by the Faster R-CNN. The SSD produces the best detection bounding boxes with high probability scores shown in Figure 5c. This benefits from the SSD generating much more default boxes compared to the Faster R-CNN and R-FCN. Moreover, the dual matching strategy in SSD allows the network to predict high scores for multiple overlapping default boxes. The speeds of the detection in our experiments for the R-FCN, Faster R-CNN and SSD are 98 ms, 130 ms and 42 ms per frame, respectively. Given that SSD provides the best trade-off between accuracy and speed, it is particularly suited to our application.
As we mentioned above, detection could fail as the detector treats each frame as independent. More importantly, the shape deformations and light fluctuations have a significant influence that leads to false positives and false negatives in the detections. Our method shows a robust detection and tracking performance to tackle these issues. Figure 6. illustrates an example detection and tracking result of our method. We can observe the light changes and shape variations of the target (ID 3 pig) in the sequence from frame a to g. Even with the pig shape deforming and light changing over this time, ID 3 is successfully detected and tracked in each frame. The scale of the tag-box is adaptive to the changes of the target over the sequence. It is notable that our method has robust performance even in a scenario shown in the Figure 6f, where the shape of the pig is severely distorted and two pigs are overlapped.
The drift of the tag-box tracking is mainly caused by occlusions. Our method also possesses a robustness in detection and tracking under the occlusion condition. For example, Figure 7 (from frame a to h) shows an example of detection and tracking results for the occlusions with an insect. As we can see from Figure 7b, an insect breaks into the scene and results in the occlusion of pig ID 2. The insect continues further across the scene in the frame in Figure 7c, worsening the occlusions. As a result, the occlusion directly leads to the number 6 tag-box drift. We can see that the tag-box of ID 6 adheres to the local area around the bottom of the pig ID 2 in the subsequent frames (Figure 7d–f). By triggering the re-initialization of the drifted ID 6 tag-box, it has successfully recovered in Figure 7g, and the system continues tracking in the subsequent frame after re-initialization, see Figure 7h.
The main advantage of our method is that it can handle severe occlusions for the detection and tracking of multiple pigs within both nighttime and daytime conditions (Figure 8 and Figure 9). For example, for a night video, we can see the pigs are detected and tracked correctly in Figure 8 frame a to c. In the frames from d to f, an insect crosses over the camera and results in a sudden light change as well as a low contrast in the frames (comparing frame b to g). More specifically, in frame d, the bounding box with ID 6 contains more than one tag-box (ID 6 and ID 5) while the drifted tag-box of ID 5 (illustrated by yellow box in the Figure 8d) is not correctly assigned to the corresponding detection box. This condition triggers the pending scheme that the tag-box of ID 5 is pended in the frames from e to g; the pending process further triggers a tag-box initialization process in frame h. In addition, we can see from Figure 8 that the pig of ID 1 lies on the left side of the pen under the shadow in frame a, and the condition becomes more complicated when this pig moves close to the pig of ID 1 and lies next to it (see Figure 8d–g). Even in such a challenging condition, our method still produces stable detection and tracking results for the pig of ID 1 in every frame of the sequence. The detection and tracking results in Figure 9 also show the robustness of our method to tackle the severe occlusion of pigs in day videos.
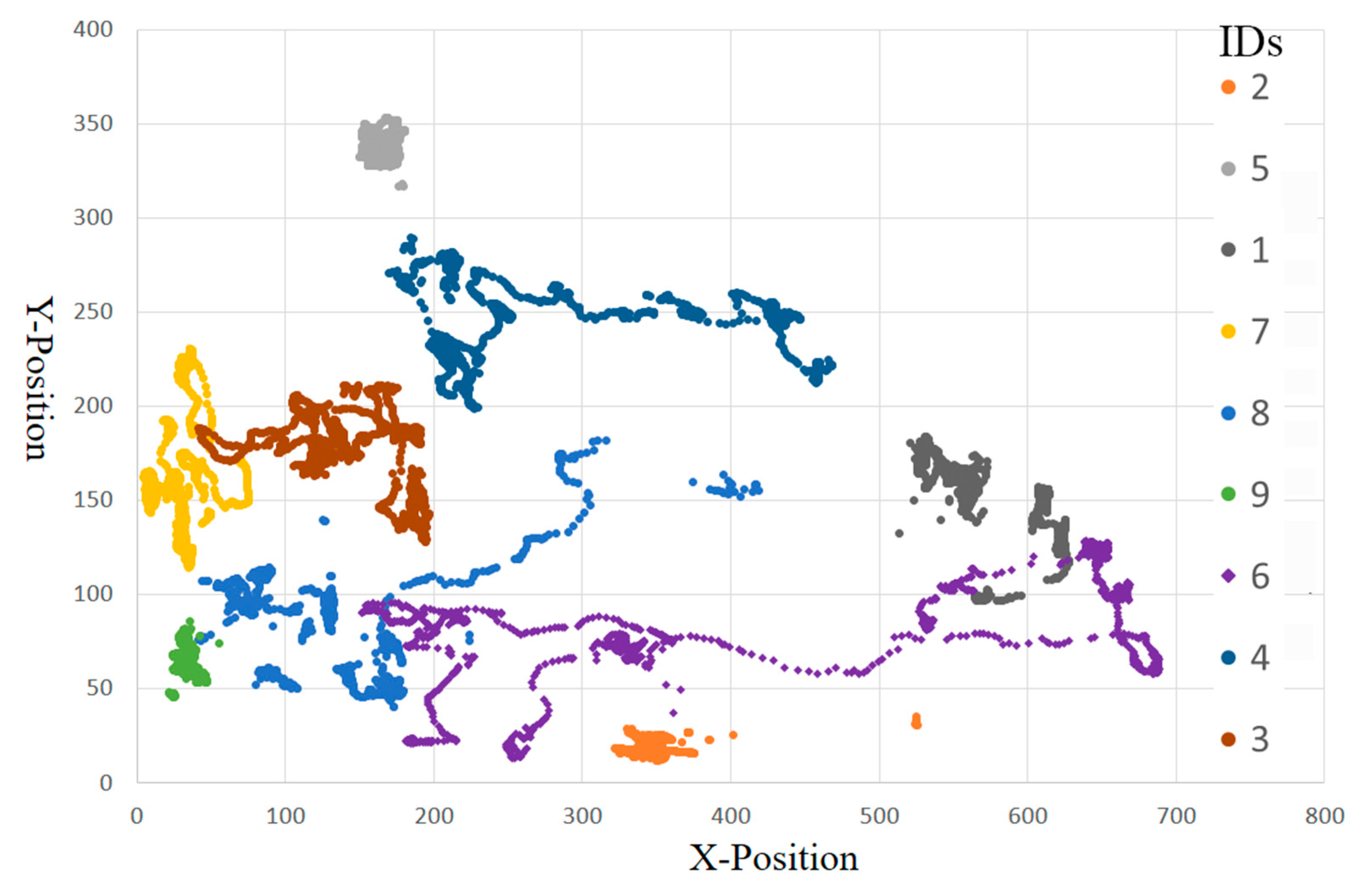
Figure 10 illustrates the trajectories of nine pigs which are predicted from the S3 test sequence. The trajectories are plotted using the central points of the bounding boxes in the sequence. They are distinguished by different colors associated with different pig IDs. With some interferences (e.g., shape deformations, light fluctuation and insect), a number of track fragments can be observed. However, our method correctly associated these track fragments into nine integrated trajectories.
We evaluated our method using the MOT evaluation metrics described in Section 4.1. The quantitative analysis of our method is presented in Table 3. As our method employs the tracking-by-detection strategy, both detection and tracking performances are measured in our experiments. Overall, our method achieves precision of 94.72%, recall of 94.74%, and MOTA of 89.58%. This implies that our method can robustly detect and track multiple pigs under challenging conditions. The relatively low FAF of 0.47 indicates that our method can reduce the false positives in detections to tackle the three major challenges. It is notable that the metric of the mostly lost targets (ML) is zero. This implies all nine pigs are tracked appropriately. Only one pig in sequence S1 is partially tracked. The relatively low number of ID switches and FRA of 66.2 indicates our method can robustly construct tracks under challenging conditions. The MT of 8.8 with ML of 0 and IDs of 18 also demonstrates that the track fragments are well integrated into respective tracks while their original IDs are recovered correctly in the scenes under the occlusions, shape deformations and light fluctuations conditions.
5. Discussion and Further Work
With regard to the detectors described in Section 3.2, it could be argued that the performances of the R-FCN and Faster R-CNN can be improved by adjusting more proposed regions in the RPN. However, due to the two-stage prediction in these networks, the operational speed depends on the number of proposals. Increasing the number of the boxes can significantly reduce the speed. Speed can be increased by using fewer boxes, but at the risk of reducing accuracy. It can be difficult to decide which detector is best suited to a particular application. In this case, we investigated the three most representative CNN-based detection architectures, and found that the SSD displays the best accuracy/speed trade-off for multiple pig detections.
The similar appearances of pigs can critically affect the tacking. To some extent, a reliable tracking performance using a correlation filter-based tracker relies on the discrimination in the appearance model. Although there are many features proposed for object tracking, we find pixel-wise features with a more local scope are more suitable than region features which are extracted from a wider range to track multiple similar objects. Moreover, due to the similarity of the colour as well as the shapes between pigs, the features extracted based on colour and shape cues may not be discriminative enough to construct reliable tracks. In most cases, conducting these less discriminative features for multiple object tracking can result in serious track drift. Therefore, in our method, we applied the HoG features on the more local region (tag-box) instead of the wider region (bounding box). Of course, it is possible to track the objects with bounding boxes by increasing the number of cells in the HoG; however, this larger region can significantly increase the computational cost and so reduce the tracking speed. It may be worthwhile to investigate more hand-crafted features extracted from more local regions (e.g., Haar, Surf, ORB, etc.). Benefited from the efficiency of the SSD and applying multiple objects tracking in a parallel computing manner, our detection and tracking method achieves speed of 12 FPS (frames per second) on a PC with configuration: Inter(R) Core(TM) i9-7900x [email protected] GHZ, 32 GB RAM and Geforce GTX 1080Ti GPU.
We proposed a data association algorithm to bridge the detector and tracker that allows them to work in a complementary manner. The detection and tracking confidence (failures) for a target is represented by the spatial relations between the tag-box and the detection bounding box for the first time. Using the data association, the detector and tracker are coupled to predict more accurate object detection with more coherent trajectories. It is notable that the spatial relation defined in Formula (10) is a straightforward way to model the tracking confidence; however, more sophisticated and efficient motion features can be integrated into the pipeline by defining a different cost function based on additional cues (e.g., velocity and acceleration).
6. Conclusions
In this paper, we present an automatic multiple object detection and tracking method to monitor individual pigs in a challenging environment. The proposed method performs individual pig detection and tracking without the need to manually mark or physically identify the pigs, working under both daylight and nighttime conditions. In order to tackle the major problems (e.g., light fluctuation, similar appearances, object deformations and occlusions), which can significantly lead to detection failures and increasing track fragments and track drifts, we propose a method which couples a CNN-based detector and a correlation filter-based tracker via a hierarchical data association algorithm. For the detections, by using the hierarchical features derived from multiple layers at different scales in a one-stage prediction network, we obtain the best accuracy/speed trade-off. For the correlation filter-based tracker, the target is defined as the tag-box which is a portion of the pig, and the tag-boxes are tracked based on the learned correlation filters working on key points tracking. Under severe conditions, the data association algorithm allows the detection hypotheses to be refined; meanwhile, the drifted tracks can be corrected by probing the tracking failures followed by the re-initialization of tracking. The tracking failures are modified by the relationship between the responses of the detector and tracker. In conclusion, the data association algorithm, detector and tracker are coupled to predict more accurate object instance inference with more coherent trajectories. Our method is trained and evaluated on 22,200 frames captured from a commercial farm. Overall, the evaluation results in a precision of 94.72%, recall of 94.74%, and MOTA of 89.58%, which shows that our method can robustly detect and track multiple pigs under challenging conditions.
Author Contributions
L.Z., X.Y. and N.A. conceived and designed the experiments; L.Z. and H.G. performed the experiments; H.G. and L.C. contributed materials and domain knowledge; all authors participated in the writing of the article.
Funding
The work is supported by the grant “PigSustain: assessing the resilience of the UK pig industry” (BB/N020790/1), which is funded by the Global Food Security ‘Food System Resilience’ Programme, which is supported by BBSRC, NERC, ESRC and the Scottish Government.
Acknowledgments
The authors would like to acknowledge the help of staff at the University of Leeds’ Spen Farm.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Leruste, H.; Bokkers, E.A.; Sergent, O.; Wolthuis-Fillerup, M.; van Reenen, C.G.; Lensink, B.J. Effects of the observation method (direct v. From video) and of the presence of an observer on behavioural results in veal calves. Animal 2013, 7, 1858–1864. [Google Scholar] [CrossRef] [PubMed]
- Jack, K.M.; Lenz, B.B.; Healan, E.; Rudman, S.; Schoof, V.A.; Fedigan, L. The effects of observer presence on the behavior of cebus capucinus in costa rica. Am. J. Primatol. 2008, 70, 490–494. [Google Scholar] [CrossRef] [PubMed]
- Iredale, S.K.; Nevill, C.H.; Lutz, C.K. The influence of observer presence on baboon (papio spp.) and rhesus macaque (macaca mulatta) behavior. Appl. Anim. Behav. Sci. 2010, 122, 53–57. [Google Scholar] [CrossRef] [PubMed]
- Tuyttens, F.A.M.; de Graaf, S.; Heerkens, J.L.T.; Jacobs, L.; Nalon, E.; Ott, S.; Stadig, L.; Van Laer, E.; Ampe, B. Observer bias in animal behaviour research: Can we believe what we score, if we score what we believe? Anim. Behav. 2014, 90, 273–280. [Google Scholar] [CrossRef]
- Taylor, D.J. Pig Diseases, 9th ed.; 5M Publishing: Sheffield, UK, 2013. [Google Scholar]
- Martinez-Aviles, M.; Fernandez-Carrion, E.; Garcia-Baones, J.M.L.; Sanchez-Vizcaino, J.M. Early detection of infection in pigs through an online monitoring system. Transbound. Emerg. Dis. 2017, 64, 364–373. [Google Scholar] [CrossRef] [PubMed]
- Kulikov, V.A.; Khotskin, N.V.; Nikitin, S.V.; Lankin, V.S.; Kulikov, A.V.; Trapezov, O.V. Application of 3-d imaging sensor for tracking minipigs in the open field test. J. Neurosci. Meth. 2014, 235, 219–225. [Google Scholar] [CrossRef] [PubMed]
- Stavrakakis, S.; Li, W.; Guy, J.H.; Morgan, G.; Ushaw, G.; Johnson, G.R.; Edwards, S.A. Validity of the microsoft kinect sensor for assessment of normal walking patterns in pigs. Comput. Electron. Agr. 2015, 117, 1–7. [Google Scholar] [CrossRef]
- Kim, J.; Chung, Y.; Choi, Y.; Sa, J.; Kim, H.; Chung, Y.; Park, D.; Kim, H. Depth-based detection of standing-pigs in moving noise environments. Sensors 2017, 17, 2757. [Google Scholar] [CrossRef]
- Matthews, S.G.; Miller, A.L.; Plotz, T.; Kyriazakis, I. Automated tracking to measure behavioural changes in pigs for health and welfare monitoring. Sci. Rep. 2017, 7, 17582. [Google Scholar] [CrossRef] [Green Version]
- Chung, Y.; Kim, H.; Lee, H.; Park, D.; Jeon, T.; Chang, H.H. A cost-effective pigsty monitoring system based on a video sensor. KSII Trans. Internet Inf. 2014, 8, 1481–1498. [Google Scholar]
- Li, Y.Y.; Sun, L.Q.; Zou, Y.B.; Li, Y. Individual pig object detection algorithm based on gaussian mixture model. Int. J. Agr. Biol. Eng. 2017, 10, 186–193. [Google Scholar]
- Mcfarlane, N.J.B.; Schofield, C.P. Segmentation and tracking of piglets in images. Mach. Vision. Appl. 1995, 8, 187–193. [Google Scholar] [CrossRef]
- Kashiha, M.; Bahr, C.; Ott, S.; Moons, C.P.H.; Niewold, T.A.; Odberg, F.O.; Berckmans, D. Automatic identification of marked pigs in a pen using image pattern recognition. Comput. Electron. Agr. 2013, 93, 111–120. [Google Scholar] [CrossRef]
- Nasirahmadi, A.; Richter, U.; Hensel, O.; Edwards, S.; Sturm, B. Using machine vision for investigation of changes in pig group lying patterns. Comput. Electron. Agr. 2015, 119, 184–190. [Google Scholar] [CrossRef]
- Tu, G.J.; Karstoft, H.; Pedersen, L.J.; Jorgensen, E. Foreground detection using loopy belief propagation. Biosyst. Eng. 2013, 116, 88–96. [Google Scholar] [CrossRef] [Green Version]
- Ahrendt, P.; Gregersen, T.; Karstoft, H. Development of a real-time computer vision system for tracking loose-housed pigs. Comput. Electron. Agr. 2011, 76, 169–174. [Google Scholar] [CrossRef]
- Henriques, J.F.; Caseiro, R.; Martins, P.; Batista, J. High-speed tracking with kernelized correlation filters. IEE Trans. Pattern Anal. 2015, 37, 583–596. [Google Scholar] [CrossRef]
- Nilsson, M.; Herlin, A.H.; Ardo, H.; Guzhva, O.; Astrom, K.; Bergsten, C. Development of automatic surveillance of animal behaviour and welfare using image analysis and machine learned segmentation technique. Animal 2015, 9, 1859–1865. [Google Scholar] [CrossRef] [Green Version]
- Stauffer, C.; Grimson, W.E.L. Learning patterns of activity using real-time tracking. IEEE Trans. Pattern Anal. 2000, 22, 747–757. [Google Scholar] [CrossRef] [Green Version]
- Sandau, M.; Koblauch, H.; Moeslund, T.B.; Aanaes, H.; Alkjaer, T.; Simonsen, E.B. Markerless motion capture can provide reliable 3d gait kinematics in the sagittal and frontal plane. Med. Eng. Phys. 2014, 36, 1168–1175. [Google Scholar] [CrossRef]
- Girshick, R. Fast r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, San Diego, CA, USA, 20–25 June 2015; pp. 1440–1448. [Google Scholar]
- Dai, J.; Li, Y.; He, K.; Sun, J. R-fcn: Object detection via region-based fully convolutional networks. arXiv, 2016; arXiv:1605.06409. [Google Scholar]
- Ren, S.Q.; He, K.M.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. Lect. Notes Comput. Sci. 2016, 9905, 21–37. [Google Scholar]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE International Conference on Computer Vision, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Uijlings, J.R.R.; van de Sande, K.E.A.; Gevers, T.; Smeulders, A.W.M. Selective search for object recognition. Int. J. Comput. Vis. 2013, 104, 154–171. [Google Scholar] [CrossRef]
- Danelljan, M.; Bhat, G.; Khan, F.S.; Felsberg, M. Eco: Efficient convolution operators for tracking. In Proceedings of the 30th IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 22–25 July 2017; pp. 6931–6939. [Google Scholar]
- Bolme, D.S.; Beveridge, J.R.; Draper, B.A.; Lui, Y.M. Visual object tracking using adaptive correlation filters. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 2544–2550. [Google Scholar]
- Danelljan, M.; Hager, G.; Khan, F.S.; Felsberg, M. Learning spatially regularized correlation filters for visual tracking. In Proceedings of the IEEE International Conference Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 4310–4318. [Google Scholar]
- Danelljan, M.; Robinson, A.; Khan, F.S.; Felsberg, M. Beyond correlation filters: Learning continuous convolution operators for visual tracking. Comput. Vis. ECCV 2016, 9909 Pt V, 472–488. [Google Scholar]
- Declercq, A.; Piater, J.H. Online learning of gaussian mixture models–A two-level approach. In Proceedings of the Third International Conference on Computer Vision Theory and Applications, Funchal, Portugal, 22–25 January 2008; Volume 1, pp. 605–611. [Google Scholar]
- Munkres, J. Algorithms for the assignment and transportation problems. J. Soc. Ind. Appl. Math. 1957, 5, 32–38. [Google Scholar] [CrossRef]
- Bernardin, K.; Stiefelhagen, R. Evaluating multiple object tracking performance: The clear mot metrics. EURASIP J. Image Video 2008, 2008, 246309. [Google Scholar] [CrossRef]
- Li, Y.A.; Huang, C.; Nevatia, R. Learning to associate: Hybridboosted multi-target tracker for crowded scene. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; Volume 1–4, pp. 2945–2952. [Google Scholar]
- Vedaldi, A.; Lenc, K. Matconvnet convolutional neural networks for matlab. In Proceedings of the 2015 ACM Multimedia Conference, Brisbane, Australia, 26–30 October 2015; pp. 689–692. [Google Scholar]
- Felzenszwalb, P.F.; Girshick, R.B.; McAllester, D.; Ramanan, D. Object detection with discriminatively trained part-based models. IEEE Trans. Pattern Anal. 2010, 32, 1627–1645. [Google Scholar] [CrossRef]
- Van de Weijer, J.; Schmid, C.; Verbeek, J.; Larlus, D. Learning color names for real-world applications. IEEE Trans. Image Process. 2009, 18, 1512–1523. [Google Scholar] [CrossRef]
Figure 1.
Challenges of automatic detection and tracking for individual pigs in real-world scenarios on a commercial farm. (a) Occlusions by pigs in day time (light-on) video footages; (b) insect causes the changes in illuminations from frame a to b in day time footages; (c) occlusions by insect in light-on footage; (d) shadows in the light-off video footage under IR model. (e) The insect effects on light-off footage; (f) the occlusion by insect in light-off footage.
Figure 1.
Challenges of automatic detection and tracking for individual pigs in real-world scenarios on a commercial farm. (a) Occlusions by pigs in day time (light-on) video footages; (b) insect causes the changes in illuminations from frame a to b in day time footages; (c) occlusions by insect in light-on footage; (d) shadows in the light-off video footage under IR model. (e) The insect effects on light-off footage; (f) the occlusion by insect in light-off footage.

Figure 2.
The general framework of proposed method, which couples a CNN-based detection and a multiple objects tracker via a novel hierarchical data association algorithm.
Figure 2.
The general framework of proposed method, which couples a CNN-based detection and a multiple objects tracker via a novel hierarchical data association algorithm.

Figure 3.
The architecture of SSD object detection.

Figure 4.
The tracking target (green box) in our method and its search area (yellow box).

Figure 5.
Comparisons of different detection architectures. The detection results shown in (a–c) are produced from the R-FCN, Faster-RCNN and SSD, respectively.
Figure 5.
Comparisons of different detection architectures. The detection results shown in (a–c) are produced from the R-FCN, Faster-RCNN and SSD, respectively.

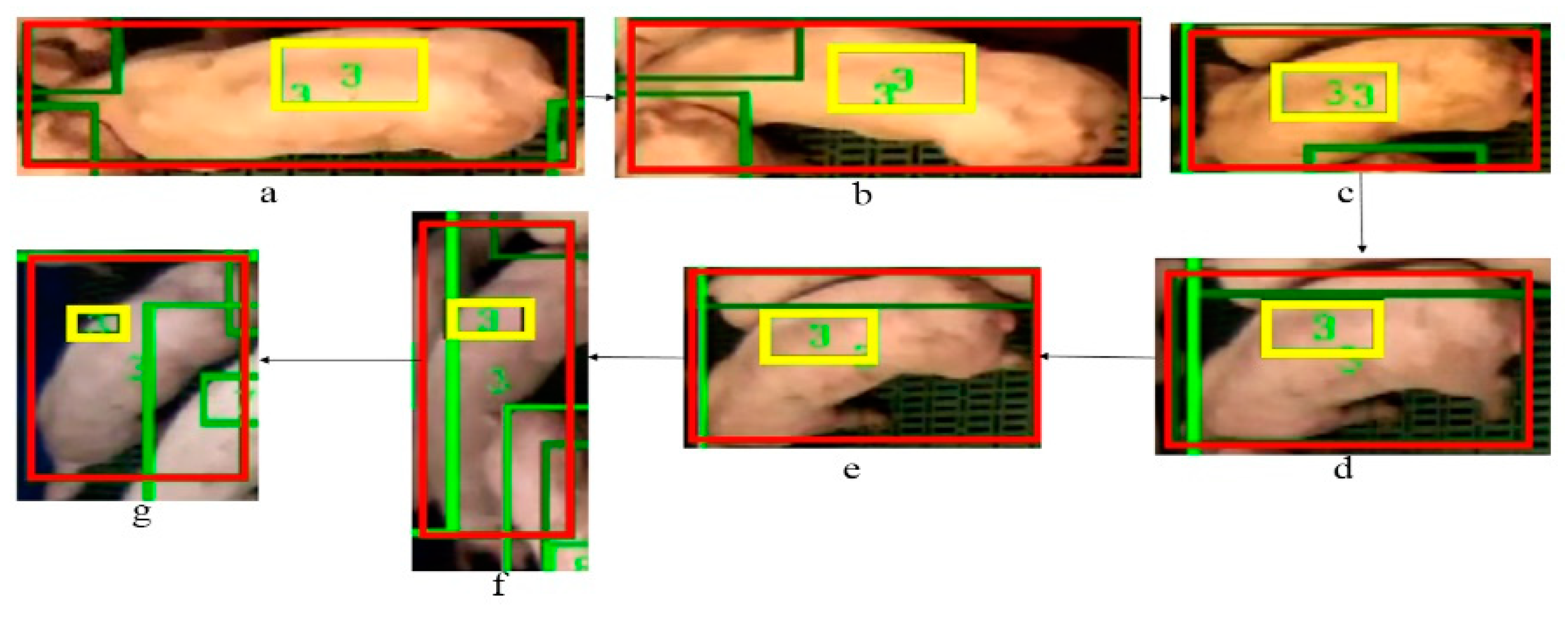
Figure 6.
The example results of our method to tackle the shape deformations. The final detected and tracked bounding boxes are shown in red colour, the tag-boxes are shown in yellow, and the unique ID numbers for tracked detection boxes and tag-boxes are shown in green. The sequence order is from frame (a) to (g). ID 3 is correctly kept with correct detection bounding boxes.
Figure 6.
The example results of our method to tackle the shape deformations. The final detected and tracked bounding boxes are shown in red colour, the tag-boxes are shown in yellow, and the unique ID numbers for tracked detection boxes and tag-boxes are shown in green. The sequence order is from frame (a) to (g). ID 3 is correctly kept with correct detection bounding boxes.

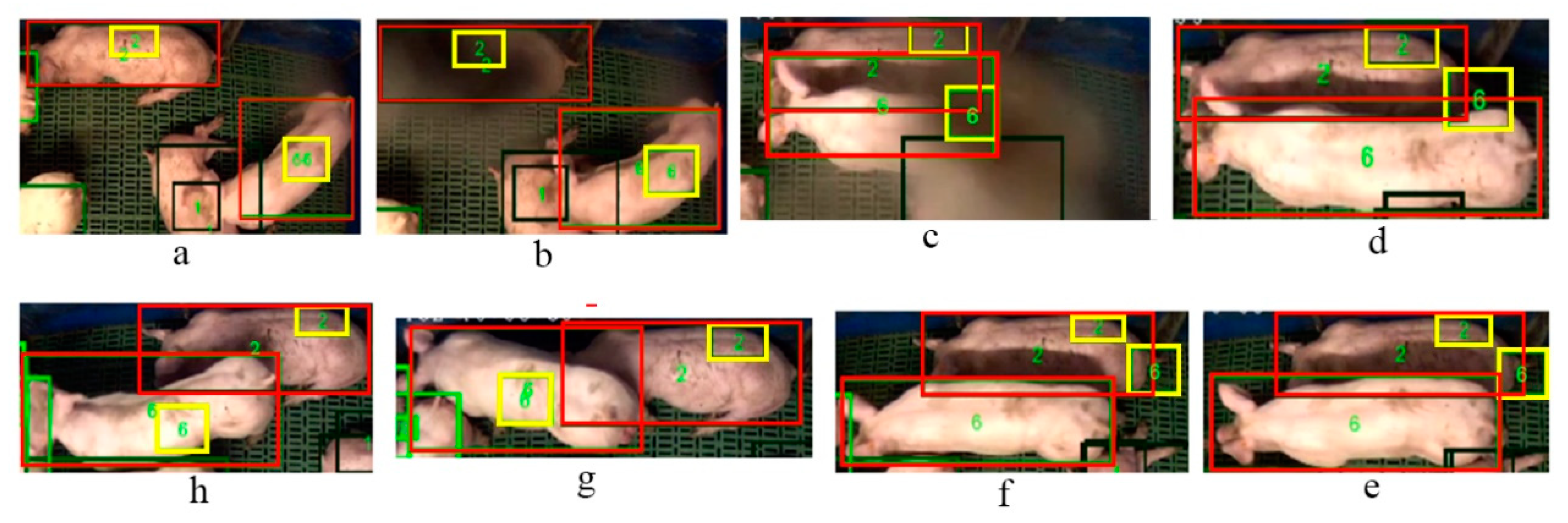
Figure 7.
The example results of our method to tackle the occlusion of insect. The final detected and tracked bounding boxes are shown in red colour, the tag-boxes are shown in yellow, and the unique ID numbers are shown in green. The sequence order is from frame (a) to (h).
Figure 7.
The example results of our method to tackle the occlusion of insect. The final detected and tracked bounding boxes are shown in red colour, the tag-boxes are shown in yellow, and the unique ID numbers are shown in green. The sequence order is from frame (a) to (h).

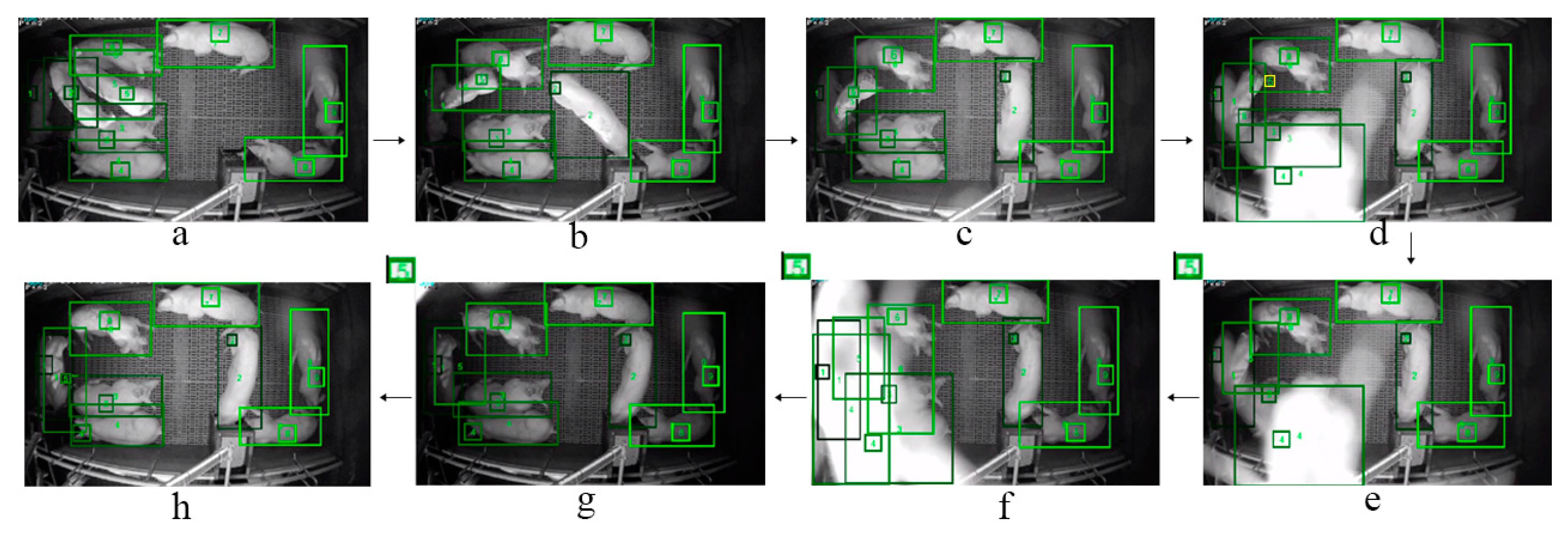
Figure 8.
The example detection and tracking results of our method in the night video with a severe occlusion of insect. The sequence order is from frame (a) to (h).
Figure 8.
The example detection and tracking results of our method in the night video with a severe occlusion of insect. The sequence order is from frame (a) to (h).

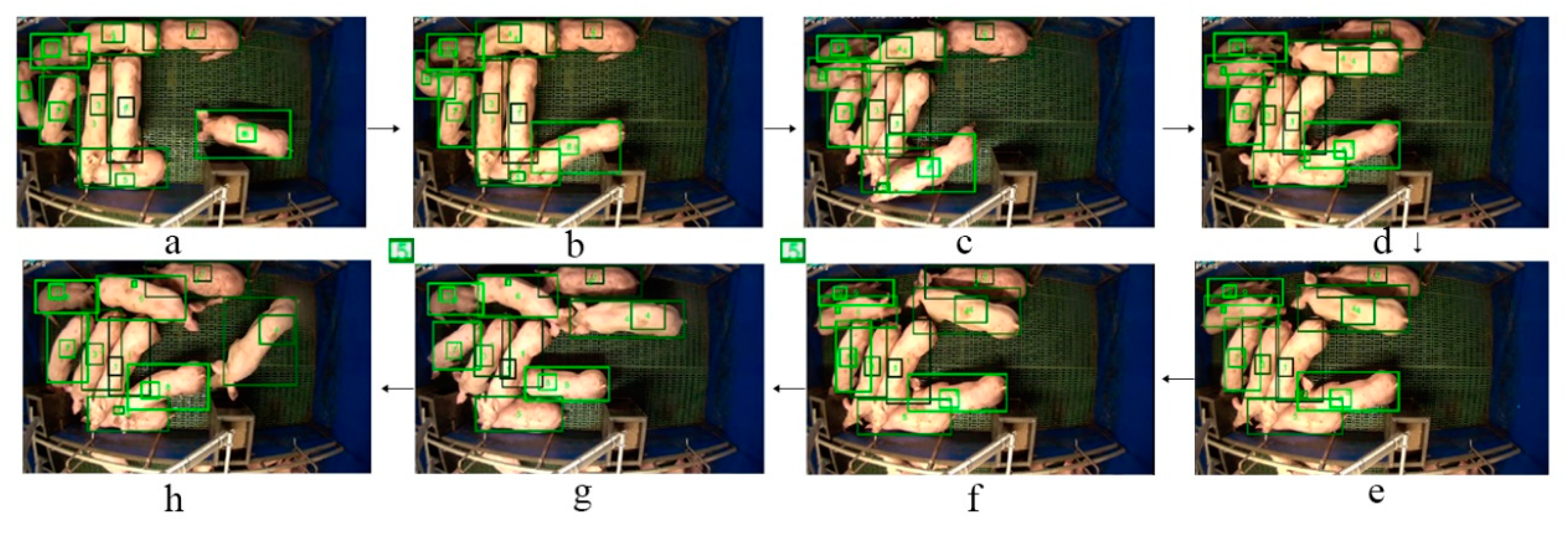
Figure 9.
The example detection and tracking results of our method in day video with a severe occlusion related to the pigs overlapping. The sequence order is from frame (a) to (h).
Figure 9.
The example detection and tracking results of our method in day video with a severe occlusion related to the pigs overlapping. The sequence order is from frame (a) to (h).

Figure 10.
The predicted trajectories of nine pigs using our method.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
A summary of the testing sequences.
| Sequence | Model | Number of Frames | The Conditions of the Sequence |
|---|---|---|---|
| S1 | Day | 800 | Deformations, light fluctuation, occlusions caused by pigs and a long stay insect on the camera |
| S2 | Day | 700 | Deformations, severe occlusions happened among pigs that resulted in the object instances becoming invisible during the occlusions |
| S3 | Day | 1500 | Deformations, light fluctuation, occlusions caused by an insect, occlusions among the pigs |
| S4 | Night | 600 | Deformations, occlusions caused by an insect, occlusions among the pigs |
| S5 | Night | 600 | Deformations, occlusions among the pigs |
Table 2.
The evaluation metrics to assess our method.
| Metric | Description |
|---|---|
| Recall ↑ | Percentage of correctly matched detections to ground-truth detections |
| Precision ↑ | Percentage of correctly matched detections to total detections |
| FAF ↓ | Number of false alarms per frame |
| MT ↑, PT, ML ↓ | Number of mostly tracked, partially tracked and mostly lost trajectories |
| IDs ↓ | Number of identity switches |
| FRA ↓ | Number of fragmentations of trajectories |
| MOTA ↑ | The overall multiple objects tracking accuracy |
Table 3.
Evaluation results of our method for individual pigs’ detections and tracking.
| Sequences ID | Recall (%) ↑ | Precision (%) ↑ | FAF ↓ | MT ↑ | PT | ML ↓ | IDs ↓ | FRA ↓ | MOTA (%) ↑ |
|---|---|---|---|---|---|---|---|---|---|
| S1 | 91.51 | 91.95 | 0.72 | 8 | 1 | 0 | 28 | 106 | 83.9 |
| S2 | 94.12 | 93.98 | 0.54 | 9 | 0 | 0 | 30 | 123 | 88.1 |
| S3 | 97.64 | 97.57 | 0.22 | 9 | 0 | 0 | 10 | 52 | 95.2 |
| S4 | 92.90 | 92.79 | 0.65 | 9 | 0 | 0 | 14 | 26 | 85.7 |
| S5 | 97.52 | 97.30 | 0.21 | 9 | 0 | 0 | 8 | 24 | 95.0 |
| Average | 94.74 | 94.72 | 0.47 | 8.8 | 0.2 | 0 | 18 | 66.2 | 89.58 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Zhang, L.; Gray, H.; Ye, X.; Collins, L.; Allinson, N. Automatic Individual Pig Detection and Tracking in Pig Farms. Sensors 2019, 19, 1188. https://doi.org/10.3390/s19051188
AMA Style
Zhang L, Gray H, Ye X, Collins L, Allinson N. Automatic Individual Pig Detection and Tracking in Pig Farms. Sensors. 2019; 19(5):1188. https://doi.org/10.3390/s19051188
Chicago/Turabian StyleZhang, Lei, Helen Gray, Xujiong Ye, Lisa Collins, and Nigel Allinson. 2019. "Automatic Individual Pig Detection and Tracking in Pig Farms" Sensors 19, no. 5: 1188. https://doi.org/10.3390/s19051188
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.