Eavesdropping and Jamming Selection Policy for Suspicious UAVs Based on Low Power Consumption over Fading Channels

 , and
, and
Abstract
:1. Introduction
- (1)
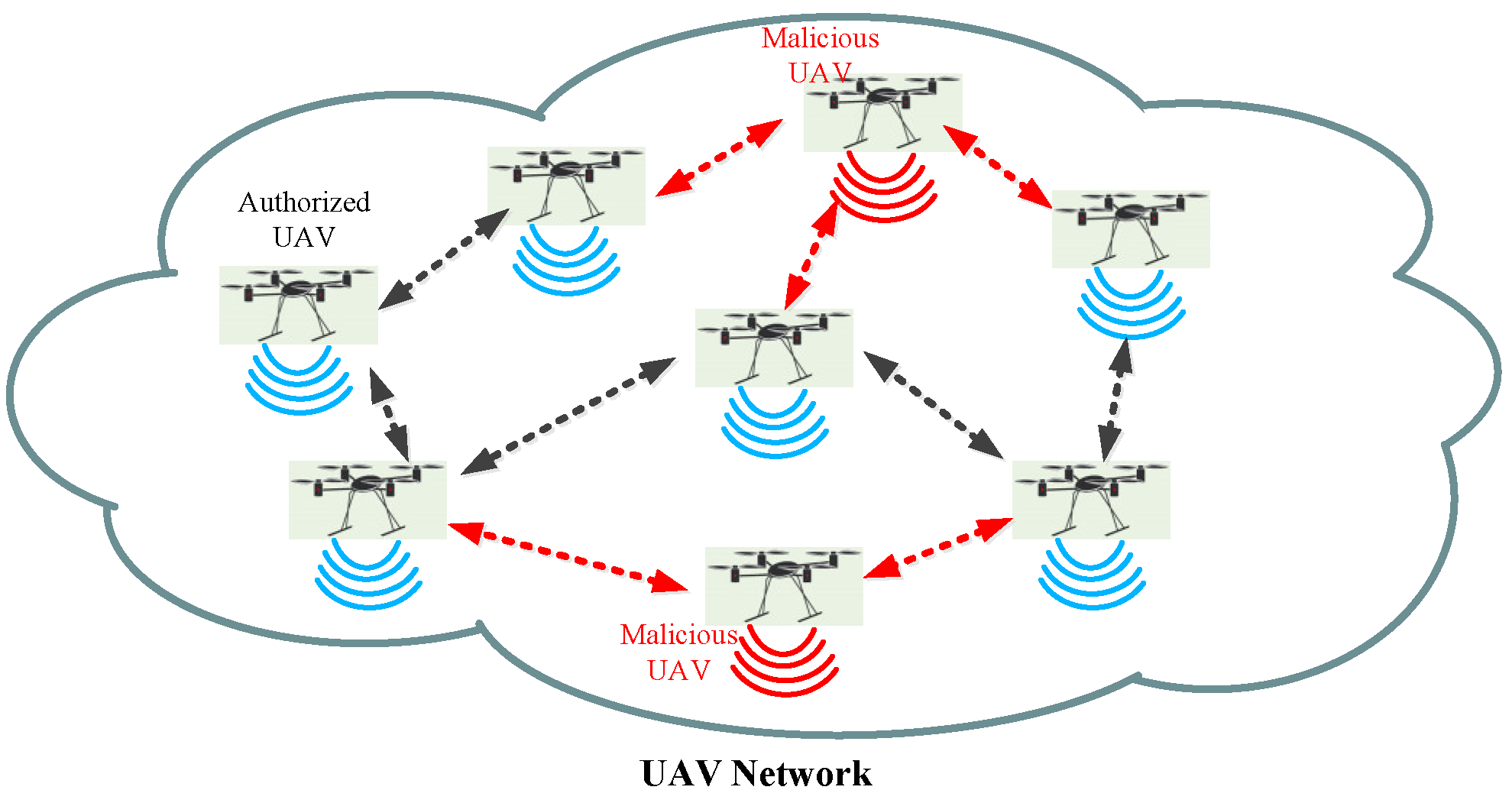
- Traditional works focused on achieving secure UAV-ground (U2G) communications in the presence of terrestrial eavesdroppers/jammers, while in our paper, we considered UAV-UAV (U2U) communications in the air, so we formulated suspicious UAVs’ distance model, which considered the dynamic mobility of suspicious UAVs in sequence time slots;
- (2)
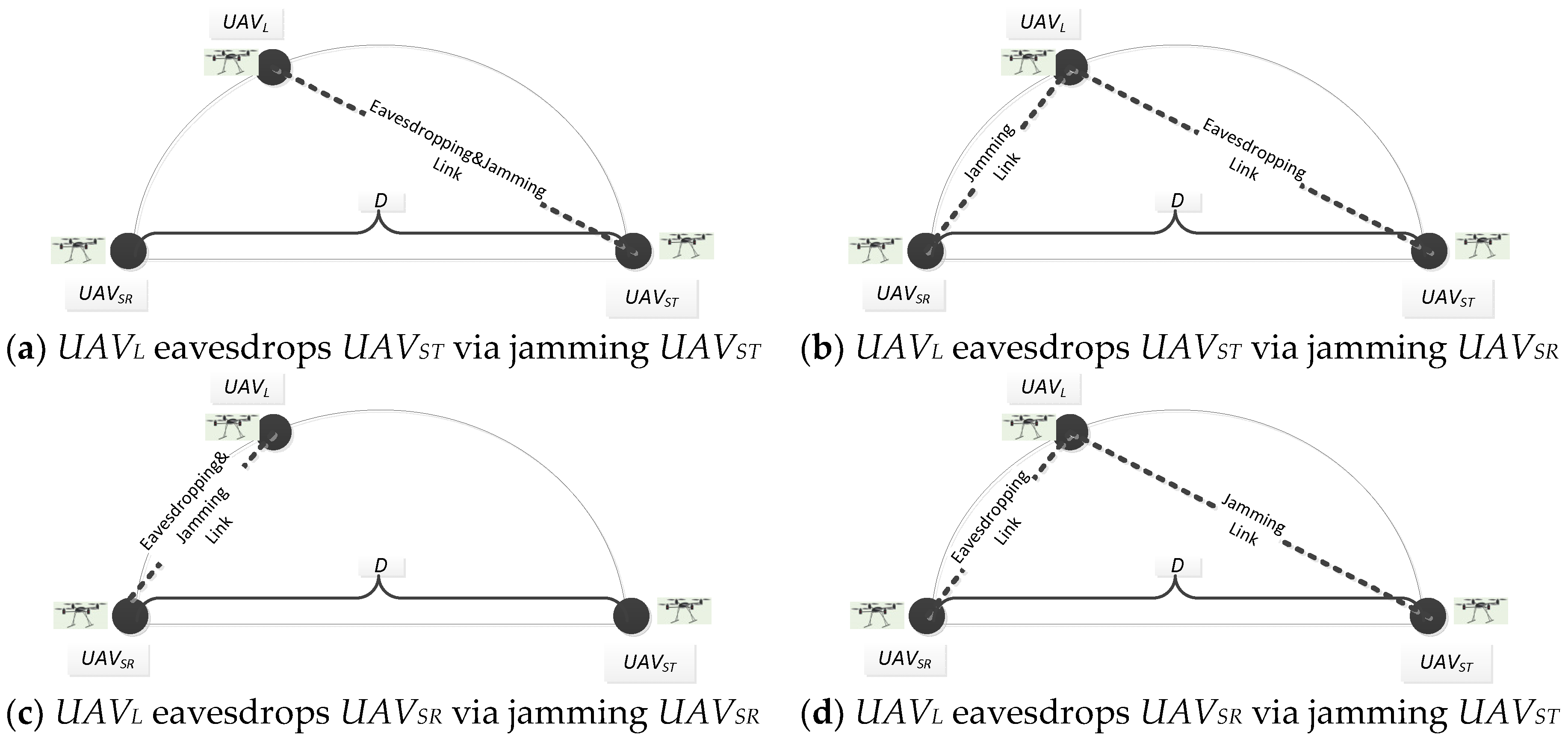
- Traditional works usually consider one case for eavesdropping and jamming, while in our paper, we proposed four cases of eavesdropping and jamming over fading channels, and then formulated an optimization problem to find the most efficient jamming power allocation at UAVL to maximize the eavesdropping rate;
- (3)
- Traditional works focus on improving power consumptions or data receive rate respectively, while in our paper, we proposed a selection policy to facilitate the simultaneous eavesdropping and jamming for UAVL on the flight, which allocated the jamming power over the fading channel according to the limited jamming power constraint as well as the position of UAVL.
2. Related Works
3. System Model
3.1. Assumptions
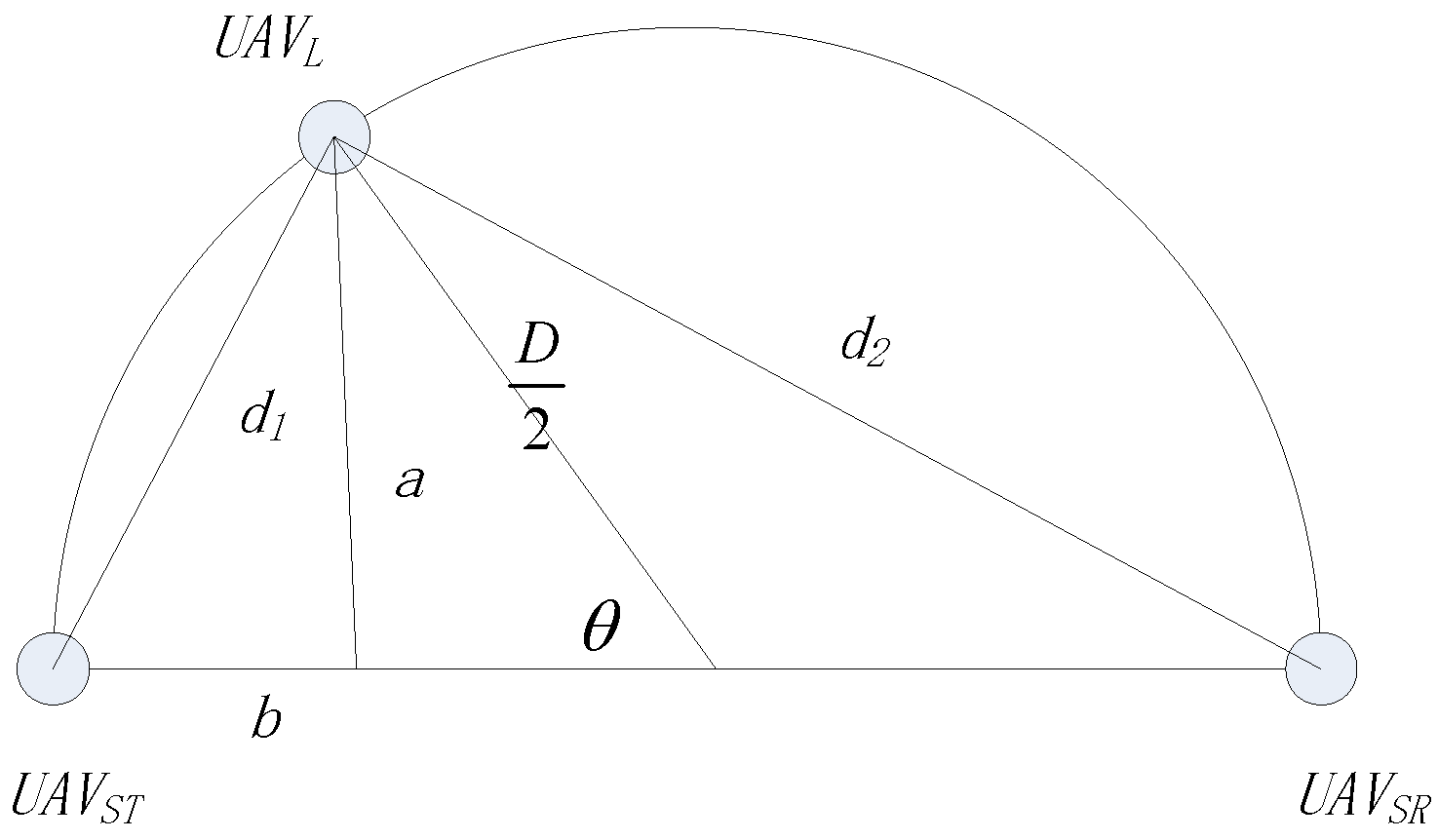
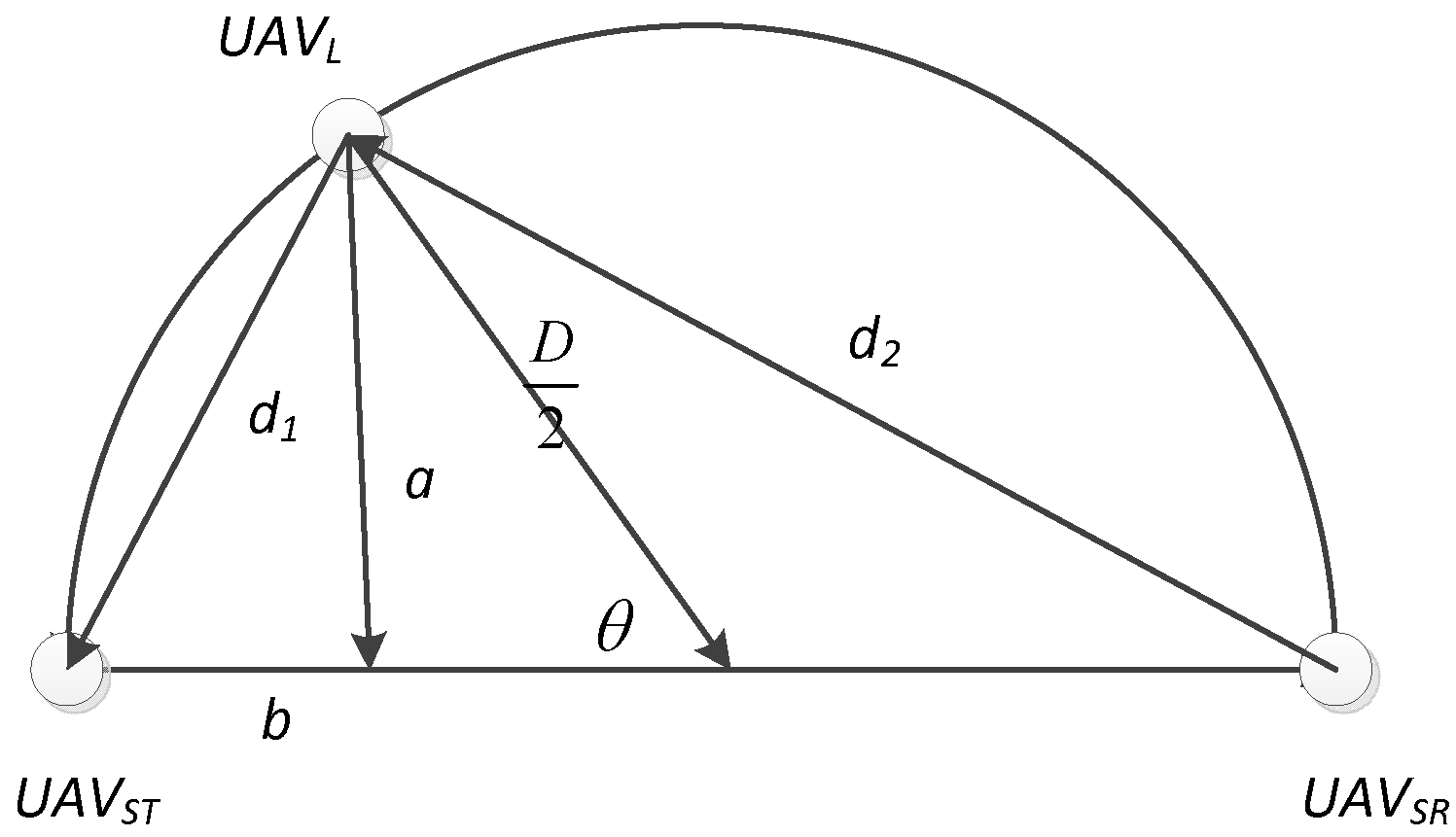
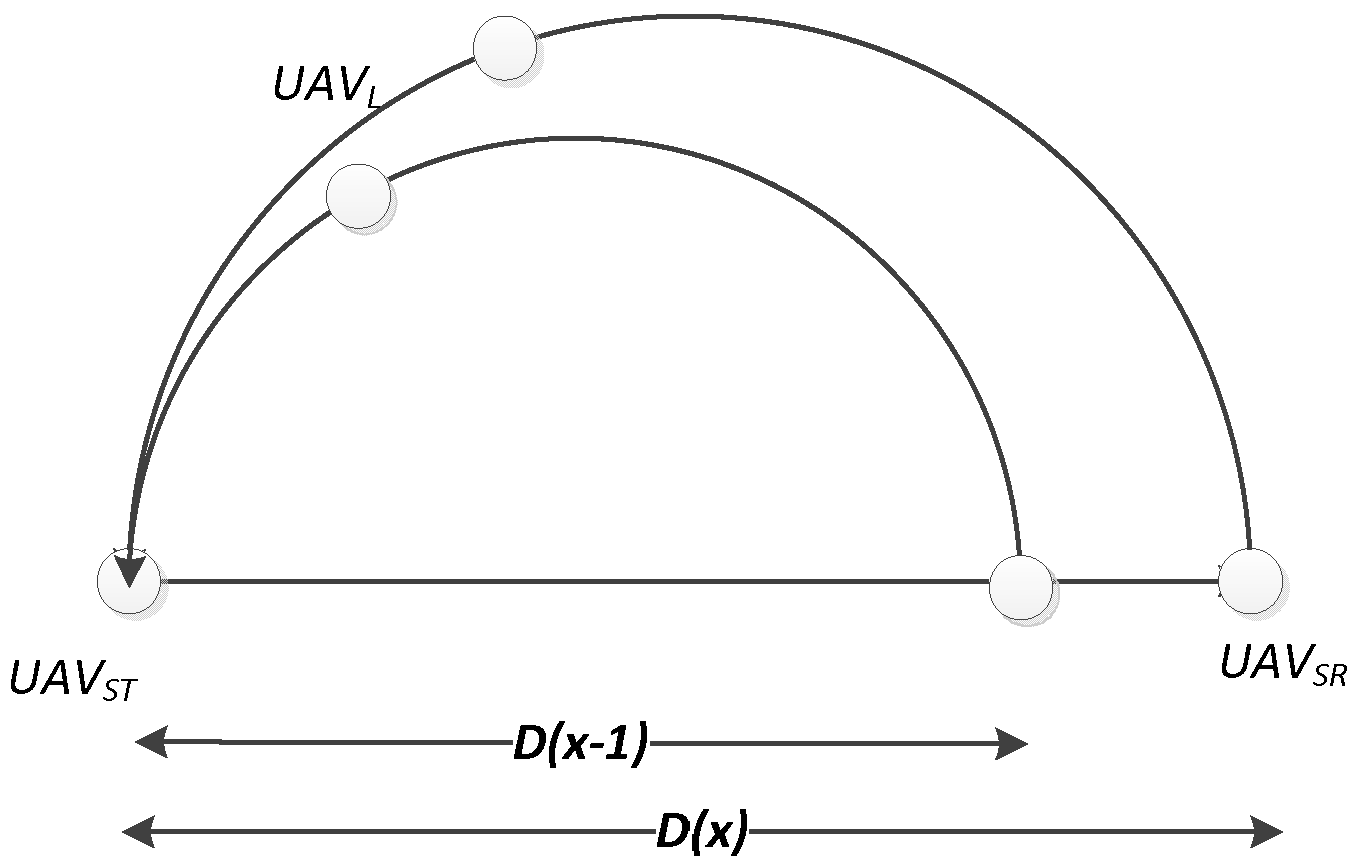
3.2. Suspicious UAVs’ Distance Model
3.3. Eavesdropping and Jamming Model
4. Formulation and Policy
4.1. Problem Formulation
4.2. Selection Policy For Eavesdropping and Jamming
| Policy 1 Selection Policy | ||
| 1: | BEGIN: | |
| 2: | : denotes the current time slot, : denotes the duration of time slot. | |
| 3: | INPUT: | |
| 4: | Ifthen | |
| 5: | ||
| 6: | Else | |
| 7: | ||
| 8: | End if | |
| 9: | Acquire: via | |
| 10: | Acquire: UAVL’s position: | |
| 11: | While do | |
| 12: | Acquire: | |
| 13: | power set in all cases: | |
| 14: | End while | |
| 15: | For do | |
| 16: | If the Equations (13) (14) (15) then | |
| 17: | derive Power-efficient package rate maximum problem | |
| 18: | Acquire | |
| 19: | else | |
| 20: | ||
| 21: | Endif | |
| 22: | endfor | |
| 23: | ||
| 24: | Output: | |
| 25: | If then | |
| 26: | UAVL doesn’t shift the eavesdropping-jamming model. | |
| 27: | else | |
| 28: | UAVL shifts the eavesdropping-jamming model from | |
| 29: | endif | |
| 30: | ||
| 31: | Go back to line 6 until | |
| 32: | END | |
4.3. Policy Analysis
4.3.1. Computing Complexity
4.3.2. Feasible Solution
5. Numerical Results
5.1. Simulation Configurations
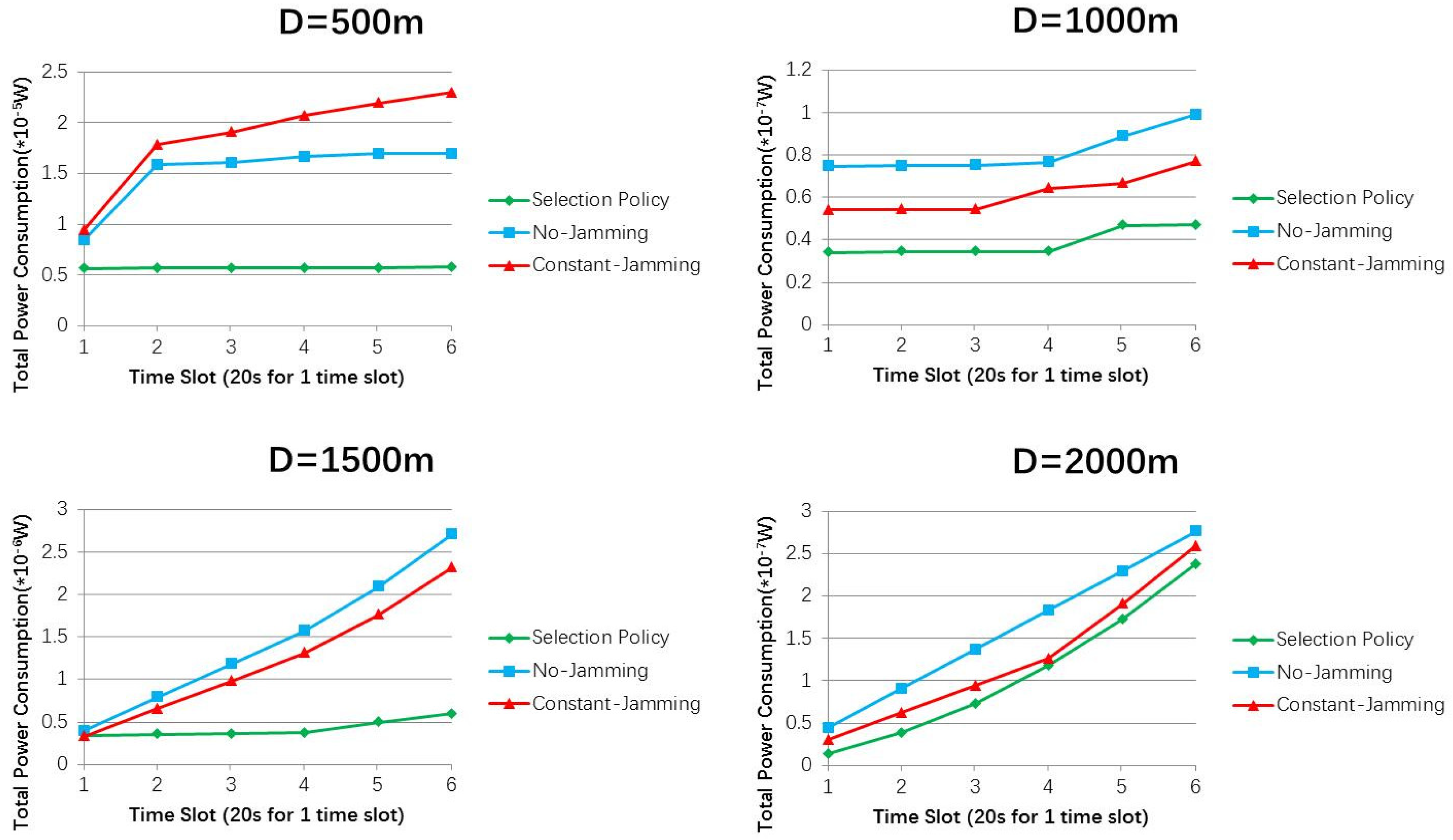
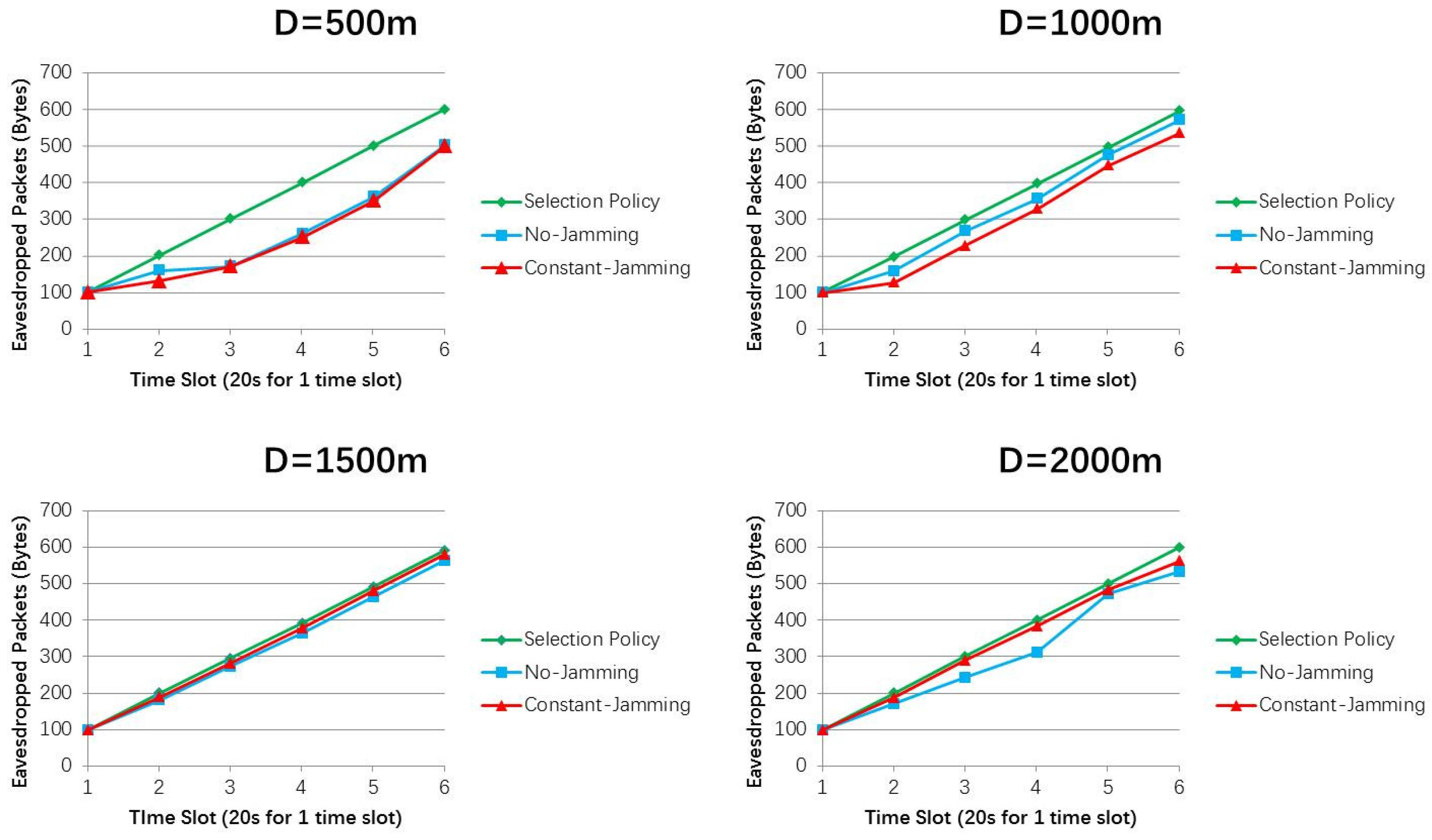
5.2. Eavesdropping Rate and Power Consumption
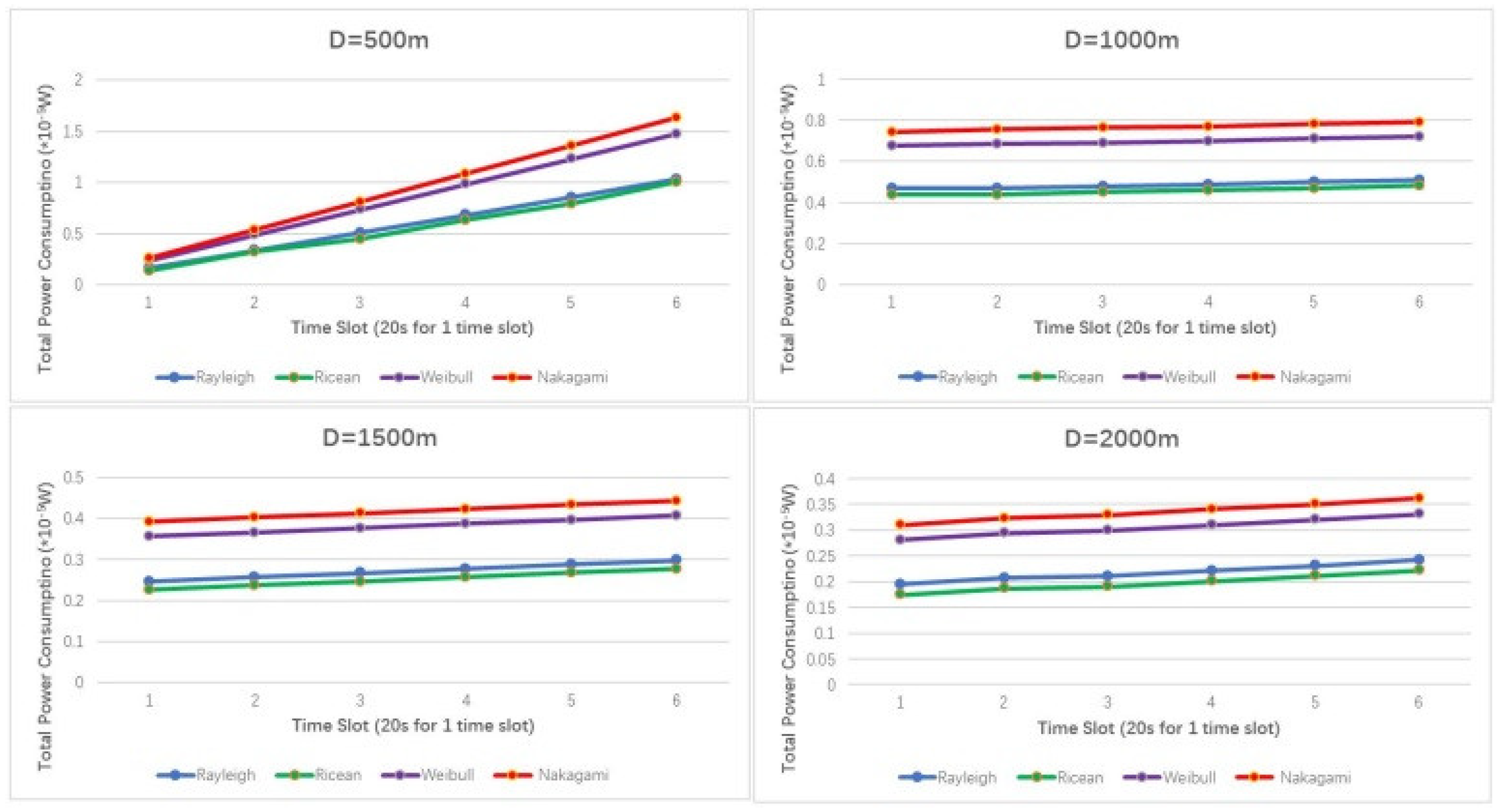
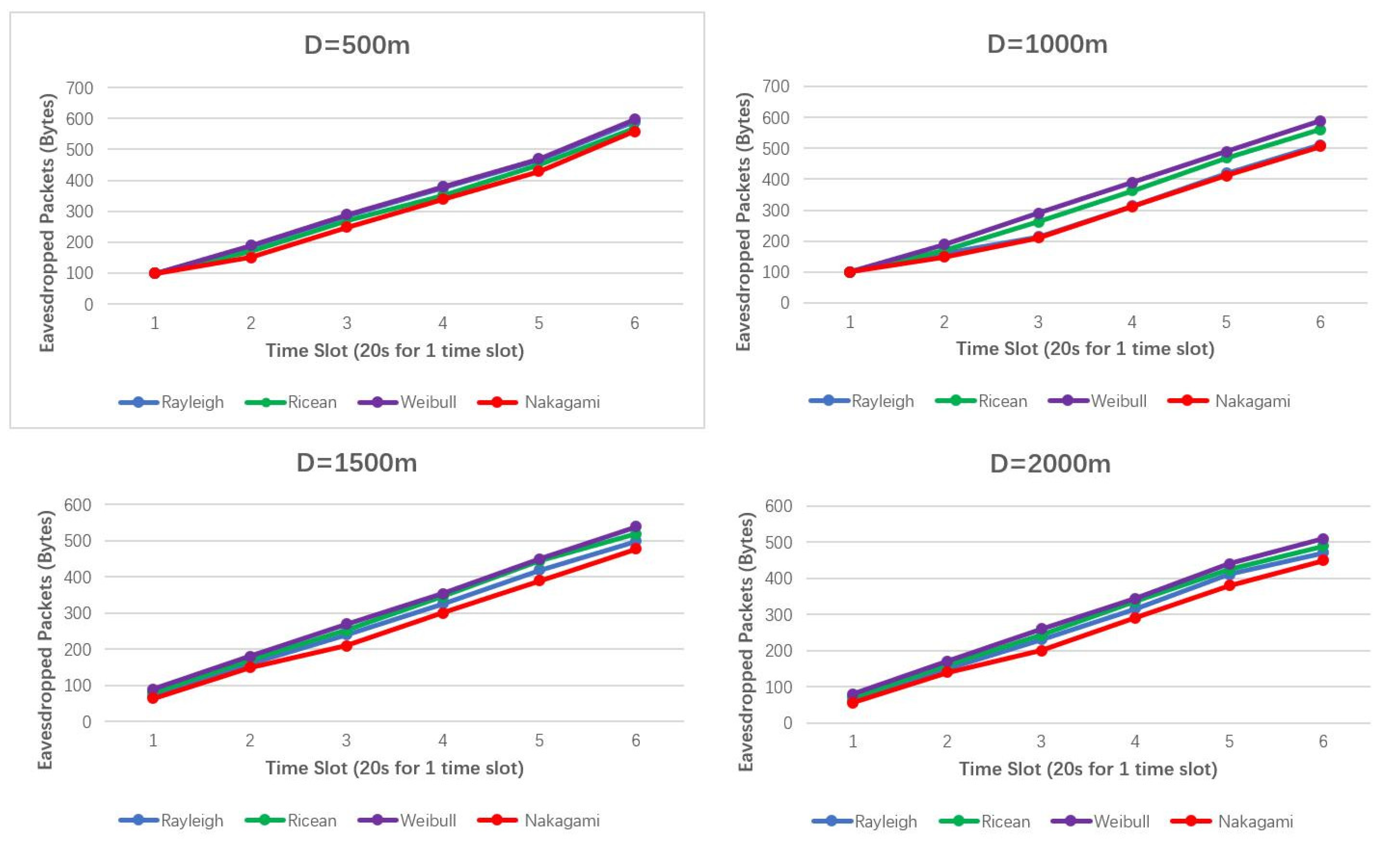
5.3. Impact of Typical Fading Models
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Li, C.; Xu, Y.; Xia, J.; Zhao, J. Protecting secure communication under UAV smart attack with imperfect channel estimation. IEEE Access 2018, 6, 76395–76401. [Google Scholar] [CrossRef]
- Zou, Y.; Zhu, J.; Wang, X.; Hanzo, L. A survey on wireless security: Technical challenges, recent advances and future trends. Proc. IEEE 2016, 104, 1727–1765. [Google Scholar] [CrossRef]
- Ju, H.; Zhang, R. Throughput maximization in wireless powered communication networks. IEEE Trans. Wirel. Commun. 2014, 13, 418–428. [Google Scholar] [CrossRef]
- Xu, J.; Zhang, R. Energy beamforming with one-bit feedback. IEEE Trans. Signal Process. 2014, 62, 5370–5381. [Google Scholar] [CrossRef]
- Xu, J.; Liu, L.; Zhang, R. Multiuser MISO beamforming for simultaneous wireless information and power transfer. IEEE Trans. Signal Process. 2014, 62, 4798–4810. [Google Scholar] [CrossRef]
- Xu, J.; Zhang, R. A general design framework for MIMO wireless energy transfer with limited feedback. IEEE Trans. Signal Process. 2016, 64, 2475–2488. [Google Scholar] [CrossRef]
- Tran, H.; Zepernick, H.J. Proactive attack: A strategy for legitimate eavesdropping. In Proceedings of the IEEE International Conference on Communications and Electronics (ICCE), Ha Long, Vietnam, 27–29 July 2016; pp. 457–461. [Google Scholar]
- Zeng, Y.; Zhang, R. Wireless information surveillance via proactive eavesdropping with spoofing relay. IEEE J. Sel. Top. Signal Process. 2016, 10, 1449–1461. [Google Scholar] [CrossRef]
- Ayub, M.F.; Ghawash, F.; Shabbir, M.A.; Kamran, M.; Butt, F.A. Next Generation Security and Surveillance System Using Autonomous Vehicles. In Proceedings of the 2018 Ubiquitous Positioning, Indoor Navigation and Location-Based Services (UPINLBS), Wuhan, China, 22–23 March 2018. [Google Scholar]
- Xu, J.; Duan, L.; Zhang, R. Surveillance and intervention of infrastructure-free mobile communications: A new wireless security paradigm. IEEE Wirel. Commun. 2017, 24, 152–159. [Google Scholar] [CrossRef]
- Xu, J.; Duan, L.; Zhang, R. Proactive eavesdropping via cognitive jamming in fading channels. IEEE Trans. Wirel. Commun. 2017, 16, 2790–2806. [Google Scholar] [CrossRef]
- Zhou, X.; Maham, B.; Hjorungnes, A. Pilot contamination for active eavesdropping. IEEE Trans. Wirel. Commun. 2012, 11, 903–907. [Google Scholar] [CrossRef]
- Wang, X.; Li, K.; Kanhere, S.S.; Li, D.; Zhang, X.; Tovar, E. PELE: Power efficient legitimate eavesdropping via jamming in UAV communications. In Proceedings of the Wireless Communications and Mobile Computing Conference (IWCMC), Valencia, Spain, 26–30 June 2017; pp. 402–408. [Google Scholar]
- Lakshmanan, S.; Tsao, C.; Sivakumar, R.; Sundaresan, K. Securing wireless data networks against eavesdropping using smart antennas. In Proceedings of the 28th International Conference on Distributed Computing Systems, Beijing, China, 17–20 June 2008; pp. 19–27. [Google Scholar]
- Raymond, R.; Midkiff, S. Denial-ofservice in wireless sensor networks: Attacks and defenses. IEEE Perv. Comput. 2008, 7, 74–81. [Google Scholar] [CrossRef]
- Kannhavong, B.; Nakayama, H.; Nemoto, Y.; Kato, N.; Jamalipour, A. A survey of routing attacks in mobile ad hoc networks. IEEE Wirel. Commun. 2007, 14, 85–91. [Google Scholar] [CrossRef]
- Meyer, U.; Wetzel, S. A man-in-themiddle attack on UMTS. In Proceedings of the 3rd ACM Workshop Wireless Security, Philadelphia, PA, USA, 1 October 2004; pp. 90–97. [Google Scholar]
- Ohigashi, T.; Morii, M. A practical message falsification attack on WPA. In Proceedings of the Joint Workshop Inf. Security, Kaohsiung, Taiwan, 6–7 August 2009; pp. 1–12. [Google Scholar]
- Shiu, Y.-S.; Chang, S.Y.; Wu, H.-C.; Huang, S.C.-H.; Chen, H.-H. Physical layer security in wireless networks: A tutorial. IEEE Wirel. Commun. 2011, 18, 66–74. [Google Scholar] [CrossRef]
- Christof, P.; Pelzl, J.; Preneel, B. Understanding Cryptography: A Textbook for Students and Practitioners; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Elliott, C. Quantum cryptography. IEEE Secur. Priv. 2004, 2, 57–61. [Google Scholar] [CrossRef]
- Cui, M.; Zhang, G.; Wu, Q.; Ng, D.W.K. Robust trajectory and transmit power design for secure UAV communications. IEEE Trans. Veh. Technol. 2018, 67, 9042–9046. [Google Scholar] [CrossRef]
- Zhou, Y.; Yeoh, P.L.; Chen, H.; Li, Y.; Hardjawana, W.; Vucetic, B. Secrecy outage probability and jamming coverage of UAV-enabled friendly jammer. In Proceedings of the 11th IEEE Australia International Conference on Signal Processing and Communication Systems (ICSPCS), Surfers Paradise, QLD, Australia, 13–15 December 2017; pp. 1–6. [Google Scholar]
- Wang, Q.; Chen, Z.; Mei, W.; Fang, J. Improving physical layer security using UAV-enabled mobile relaying. IEEE Wirel. Commun. Lett. 2017, 6, 310–313. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, H.; He, Q.; Bian, K.; Song, L. Joint trajectory and power optimization for UAV relay networks. IEEE Commun. Lett. 2018, 22, 161–164. [Google Scholar] [CrossRef]
- Mukherjee, A.; Swindlehurst, A.L. Optimal strategies for countering dual-threat jamming/eavesdropping-capable adversaries in mimo channels. In Proceedings of the Military Communications Conference, San Jose, CA, USA, 31 October–3 November 2010; pp. 1695–1700. [Google Scholar]
- Li, Y.; Xiao, L.; Dai, H.; Poor, H.V. Game theoretic study of protecting MIMO transmissions against smart attacks. In Proceedings of the IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar]
- Mukherjee, A.; Swindlehurst, A.L. Jamming games in the MIMO wiretap channel with an active eavesdropper. IEEE Trans. Signal Process. 2013, 61, 82–91. [Google Scholar] [CrossRef]
- Yoo, T.; Goldsmith, A. Capacity and power allocation for fading MIMO channels with channel estimation error. IEEE Trans. Inf. Theory 2006, 52, 2203–2214. [Google Scholar]
- Edman, M.; Kiayias, A.; Yener, B. On passive inference attacks against physical-layer key extraction? In Proceedings of the Fourth European Workshop on System Security, ACM, Salzburg, Austria, 10 April 2011; Volume 8. [Google Scholar]
- Mitrpant, C.; Vinck, A.; Luo, Y. An achievable region for the Gaussian wiretap channel with side information. IEEE Trans. Inf. Theory 2006, 52, 2181–2190. [Google Scholar] [CrossRef]
- Negi, R.; Goel, S. Secret communication using artificial noise. In Proceedings of the IEEE International Conference on Vehicular Technology (VTC), Dallas, TX, USA, 28 September 2005; Volume 3, pp. 1906–1910. [Google Scholar]
- Bloch, M.; Barros, J.; Rodrigues, M.R.D.; McLaughlin, S.W. Wireless information-theoretic security. IEEE Trans. Inf. Theory 2008, 54, 2515–2534. [Google Scholar] [CrossRef]
- Zheng, G.; Krikidis, I.; Li, J.; Petropulu, A.P.; Ottersten, B. Improving physical layer secrecy using fullduplex jamming receivers. IEEE Trans. Signal Process. 2013, 61, 4962–4974. [Google Scholar] [CrossRef]
- Wu, Q.; Mei, W.; Zhang, R. Safeguarding Wireless Network with UAVs: A Physical Layer Security Perspective. arXiv, 2019; arXiv:1902.02472.preprint. [Google Scholar]
- Li, A.; Wu, Q.; Zhang, R. UAV-enabled cooperative jamming for improving secrecy of ground wiretap channel. IEEE Wirel. Commun. Lett. 2018, 8, 181–184. [Google Scholar] [CrossRef]
- Zhang, G.; Wu, Q.; Cui, M.; Zhang, R. Securing UAV communications via joint trajectory and power control. IEEE Trans. Wirel. Commun. 2019. [Google Scholar] [CrossRef]
- Li, K.; Ni, W.; Wang, X.; Liu, R.P.; Kanhere, S.S.; Jha, S. Energy-efficient cooperative relaying for unmanned aerial vehicles. IEEE Trans. Mobile Comput. 2016, 15, 1377–1386. [Google Scholar] [CrossRef]
- Schoel, W.M.; Schürch, S.; Goerke, J. The captive bubble method for the evaluation of pulmonary surfactant: Surface tension, area, and volume calculations. Biochim. Biophys. Acta (BBA)-Gen. Subj. 1994, 1200, 281–290. [Google Scholar] [CrossRef]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Wu, Q.; Zhang, R. Common throughput maximization in UAV-enabled OFDMA systems with delay consideration. IEEE Trans. Commun. 2018, 66, 6614–6627. [Google Scholar] [CrossRef]
- Wu, Q.; Zeng, Y.; Zhang, R. Joint trajectory and communication design for multi-UAV enabled wireless networks. IEEE Trans. Wirel. Commun. 2018, 17, 2109–2121. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Descriptions |
|---|---|
| Legitimate monitor consuming power () at time slot x | |
| Legitimate monitor eavesdropping power at time slot x | |
| Legitimate monitor jamming power at time slot x | |
| SNR of eavesdropping link at time slot x | |
| SNR of suspicious link at time slot x | |
| Two constants relating to the channel | |
| Power of white Gaussian noise | |
| Distance between UAVL and UAVST at time slot x | |
| Distance between UAVL and UAVSR at time slot x | |
| Maximum consuming power of UAVL | |
| Total jamming power of UAVL | |
| Gaussian random number | |
| Path-loss exponent of wireless channel | |
| Coefficient considered to adjust the weights of the autocorrelated component and independent component | |
| SINR/SNR threshold | |
| Adaptive modulation and coding (AMC) rate at time slot x | |
| The required instantaneous bit error rate |
| Parameters | Values |
|---|---|
| 0.2 | |
| 3 | |
| 2.6 | |
| 1 | |
| 60 | |
| [−10, 10] | |
| [0, π] | |
| 20 | |
| 10 | |
| 0.05 | |
| 3.98 × 10−12 W | |
| 100 bytes | |
| 3 | |
| 0.3 | |
| 0.005377 | |
| 3 | |
| 2.5 | |
| 500 m, 1000 m, 1500 m, 2000 m | |
| 8 × 10−6 W | |
| 1, 2, 4, 8 | |
| Constant Jamming Power | 10−8 W |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Li, D.; Guo, C.; Zhang, X.; Kanhere, S.S.; Li, K.; Tovar, E. Eavesdropping and Jamming Selection Policy for Suspicious UAVs Based on Low Power Consumption over Fading Channels. Sensors 2019, 19, 1126. https://doi.org/10.3390/s19051126
Wang X, Li D, Guo C, Zhang X, Kanhere SS, Li K, Tovar E. Eavesdropping and Jamming Selection Policy for Suspicious UAVs Based on Low Power Consumption over Fading Channels. Sensors. 2019; 19(5):1126. https://doi.org/10.3390/s19051126
Chicago/Turabian StyleWang, Xiaoming, Demin Li, Chang Guo, Xiaolu Zhang, Salil S. Kanhere, Kai Li, and Eduardo Tovar. 2019. "Eavesdropping and Jamming Selection Policy for Suspicious UAVs Based on Low Power Consumption over Fading Channels" Sensors 19, no. 5: 1126. https://doi.org/10.3390/s19051126