Joint Estimation of DOA and Frequency of Multiple Sources with Orthogonal Coprime Arrays


Department of Electrical Engineering, National Taiwan University, Taipei 106, Taiwan
*
Author to whom correspondence should be addressed.
†
These authors contributed equally to this work.
Sensors 2019, 19(2), 335; https://doi.org/10.3390/s19020335
Submission received: 22 November 2018
/
Revised: 3 January 2019
/
Accepted: 12 January 2019
/
Published: 15 January 2019
(This article belongs to the Section Physical Sensors)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:A two-stage method is proposed to jointly estimate the direction-of-arrival (DOA) and carrier frequency (CF) of multiple sources, by using two orthogonal coprime arrays (CPAs). The DOAs of CF-known sources are estimated first by applying a spatial smoothing MUSIC algorithm. The contribution of these source signals is then removed from the originally received signal by applying an orthogonal complement projector. Next, a joint-ESPRIT algorithm is applied to estimate the DOAs and CFs of the remaining CF-unknown sources. With two orthogonal CPA(5, 6), the RMSE of DOA and CF of applying the proposed method to 30 sources, 13 of which have unknown CF, is less than 1% at SNR dB.
1. Introduction
The direction-of-arrival (DOA) of source signals is a prerequisite in many applications like cognitive radar and antenna beamforming. Typical algorithms for estimating the DOAs include subspace-based MUSIC [1], ESPRIT [2] and sparsity-based compressive sensing (CS) approach [3], among others. However, these algorithms are applicable only when the carrier frequency (CF) of signal sources is known [1,2,3,4]. For subspace-based algorithms, MUSIC [1] can generate multiple steering vectors and calculate their projection norm in the null space of receiving signals. On the other hand, ESPRIT [2] can calculate the phase delays if the sensor array possesses rotational invariance, then the DOA can be estimated under a known carrier frequency. As for compressed sensing-based algorithms [4], minimization of -norm is imposed on the sensing matrix to determine the sparse coding. However, due to Doppler shift [5] or in applications of radar tracking [6] and cognitive radios [7,8], the carrier frequency of signal sources can be ambiguous.
Recently, several algorithms were proposed to jointly estimate the DOA and CF of source signals [7,8,9,10]. In [9], a joint angle-frequency estimation (JAFE) algorithm was proposed, in which both the CF and DOA were iteratively updated from their previous values. In [7,8], a compressed carrier and DOA estimation (CaSCADE) algorithm was proposed. A modulated wideband converter (MWC) was used to estimate the CF at sub-Nyquist rate. Then, a CS approach, a parallel factor (PARAFAC) approach and a joint-ESPRIT (JE) were applied to jointly estimate the CF and DOA. In [10], a two-stage method on an uniform linear array (ULA) was proposed. The frequency components of the received signal were determined by applying Fourier transform and spectrum peak searching. Candidate DOAs at each frequency component were estimated with subspace-based methods like MUSIC. After all the CFs and DOAs were estimated, an exhaustive matching algorithm was applied to match each CF to one DOA, at high computational cost. In practice, the received signal is contributed by a combination of CF-known sources and CF-unknown sources. The performance of estimation algorithms like JE degrade as the number of signal sources increases [7,8].
A Khatri–Rao (KR) subspace was proposed to extend the degrees of freedom (DOFs) of an N-element ULA from to so that DOAs of more signal sources can be estimated [11]. In [12,13], KR subspace-based algorithms were proposed to reduce the uncertainty in gain and phase of sensors. Different array configurations such as nested array [14], coprime array (CPA) [15,16] were proposed to further increase the DOFs. In [4], two types of generalized CPA structure were reviewed and their DOFs were estimated. In [17], the DOF of a CPA was extended by scavenging the fourth-order statistics of the received signals. In [18], a triply primed array (TPA), based on fourth-order statistics, was proposed to increase the DOF beyond CPAs. The effects of mutual interference between sensors in an array were also discussed in [19,20,21].
In applications of beamforming [15,16] or cognitive radios [22], a large number of source signals are usually involved. Previous algorithms for joint estimation of DOA and CF [7,8,9,10] were applicable to a limited number of sources. In this work, a two-stage algorithm is proposed to estimate the DOAs of signal sources with known CF first, followed by the JE algorithm to estimate the DOAs and CFs of the remaining signal sources. Two orthogonal CPAs are used to increase the DOFs. This paper is organized as follows. The signal model is presented in Section 2, the proposed two-stage joint estimation algorithm is presented in Section 3, the simulation results are discussed in Section 4 and, finally, some conclusions are drawn in Section 5.
2. Signal Model
2.1. Sub-Nyquist Sampling Scheme
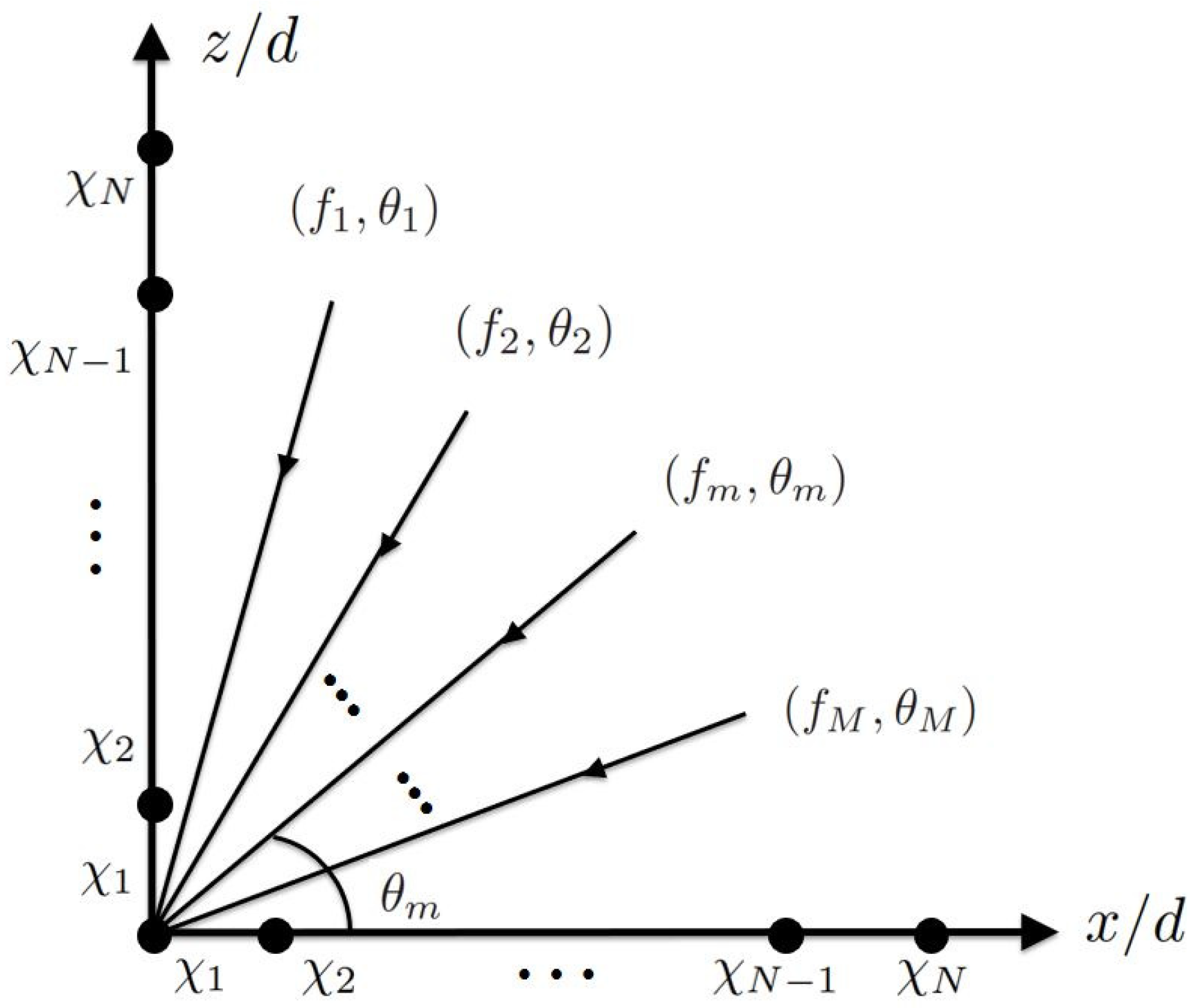
In this work, a sub-Nyquist sampling scheme [7,8] is used, where the sampling frequency is on the same order as the bandwidth of source signals, which is much lower than the carrier frequency. Figure 1 shows two orthogonal CPAs deployed along x and z axes, respectively, to receive signals from M sources, with the CF and DOA of the m-th source () being and , respectively. Without loss of generality, assume that all the signals propagate in the plane and are uncorrelated to one another. Also assume the first sources have the same CF of . The bandwidth of each source signal is limited to , where T is the period of baseband signals. The other signals with unknown CF are assumed to fall in disjoint bands, namely, .
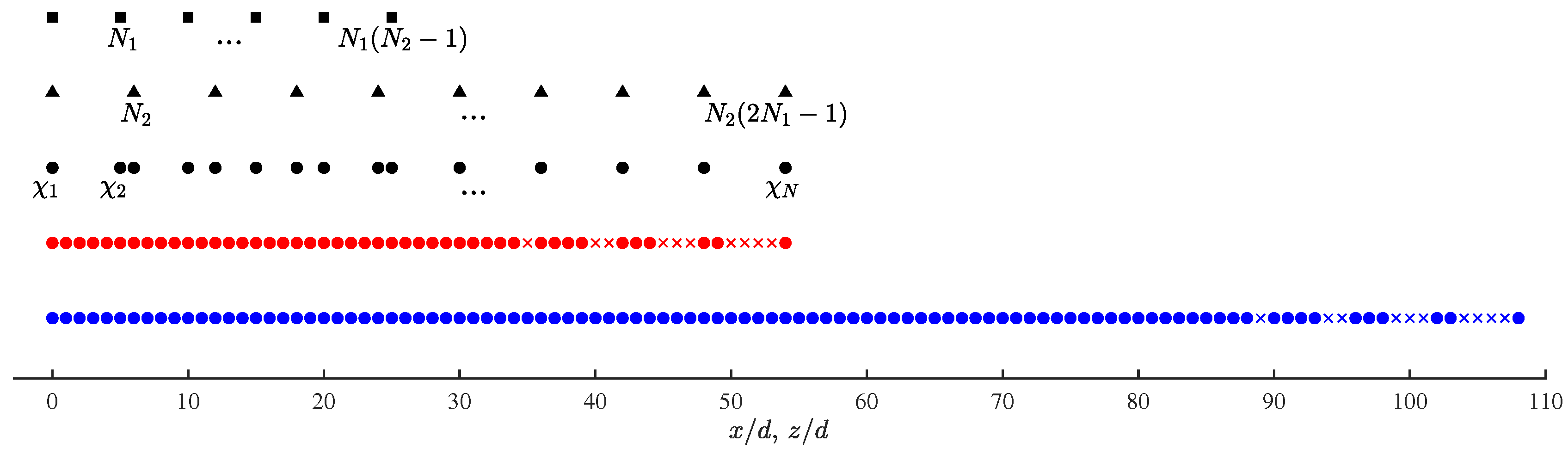
Figure 2 shows the configuration of a CPA (, ), which is composed of two ULAs at spacings of and , respectively; where and are coprime integers and d is the unit spacing. The first ULA has sensors at spacing of and the second ULA has sensors at spacing of . Both ULAs share the same first sensor, which is located at the origin, leading to a total of physical sensors in the CPA (, ) configuration. The locations of the physical sensors in these two ULAs and the whole CPA are specified by , and , respectively, with
where .
The received signal by the n-th sensor along the x axis can be represented as
where , and is the time advance of the n-th sensor with respect to the first one at the origin. The Fourier transform of is
where is the spectrum of the m-th baseband signal, with .
Consider a periodic signal with period , where . The received signal is multiplied with to derive
which is Fourier transformed to have
By applying an ideal low-pass filter (LPF) with cutoff frequency to , we obtain
By choosing , the baseband information in ’s is preserved in . Explicitly, can be represented as
with , where , which is slightly different from that in [8].
Next, take the inverse Fourier transform of to have
which is sampled at the rate of to obtain
where and . Note that we may choose .
Similarly, the received signals in the array along the z-axis are processed to have
where , and
with .
By taking noise into consideration, (2) and (3) are modified as
where and are the abbreviations of and , respectively; and are uncorrelated additive white Gaussian noise vectors at the ℓth sampling time instant. The noise vectors are assumed to have zero mean and covariance matrix , where is an identity matrix.
2.2. Second-Order Statistics
Assume the source signals are wide-sense quasi-stationary, which are observed over Q non-overlapped time frames, with each time frame lasting for [4,11,18]. The average power of the m-th source signal in the q-th time frame is represented as
Assume ’s from different sources are uncorrelated, with their first and second moments determined as
where means the expectation value is taken over the q-th time frame. The covariance matrices of the received signals in the q-th time frame are determined as
where is the received signal in the q-th time frame and .
In practice, and are estimated as
By concatenating all the columns of and , respectively, into vectors, (5) is transformed to
where , , and are second-order difference manifold matrices, and ⊙ means column-wise Kronecker product. By subtracting the expectation value over time-frame index q from and , respectively, we have
where = .
Next, by taking the average of entries in and , respectively, that have the same lags (of same or opposite sign), we derive the observation vectors as
where contains the index of entries having lags in , with . In other words, and serve as steering matrices of effective ULAs deployed along x and z axes, respectively, with virtual sensor locations specified by . The set associated with the x-direction ULA is the same as that with the z-direction ULA because both ULAs have the same physical configuration.
3. Joint Estimation of DOA and CF
In this Section, a two-stage algorithm is proposed, in which the DOA of CF-known sources are estimated first, then the DOA and CF of the remaining sources are jointly estimated.
3.1. DOA Estimation of Signal Sources with Known CF
The second-order statistics of the received signals can be used to derive Q-manifold signals, which are then processed with subspace-based algorithms like ESPRIT or MUSIC to estimate the DOA and CF of the original sources. If the fourth-order statistics of the source signals are available, the fourth-order covariance matrices can be estimated as
where . The covariance matrices and are then vectorized as
where , , and . By taking the average of entries with same lags in and , respectively, we obtain
where contains the index of entries having lags in , with [17]. The set associated with the ULA in x-direction is the same as that with the ULA in z-direction because both ULAs have the same physical configuration. Note that subspace-based algorithms are applicable to CPA with contiguous lags in both x and z directions. Next, construct spatial smoothing covariance matrices of the fourth-order as [23]
Algorithm 1 lists the major steps of the spatial smoothing MUSIC (SS-MUSIC). In steps 5–7, the conventional MUSIC algorithm is applied to and , respectively, to estimate the DOAs to the nearest grid points, and record them in and , respectively. Next, for every entry in , find the best match in with DOA difference smaller than , then record the average of these two DOAs in .
| Algorithm 1 SS-MUSIC based on two orthogonal CPAs |
Input:
|
3.2. Joint-ESPRIT in Projected Subspace
The DOAs of the signal sources with known CF () are estimated and stored in . The steering vectors associated with these sources are then removed by applying the orthogonal complement projectors
where is the largest lag in of the second-order virtual arrays, and are the steering matrices of CPAs in x and z directions, respectively, with contiguous lags specified in .
Next, apply the joint-ESPRIT (JE) algorithm to estimate the DOA and CF of the remaining sources embedded in the residual signals [8]. Construct two subarrays out of each second-order virtual array in x and z direction, respectively, as
where and are the observation vectors from the first and the last second-order virtual sensors, respectively, in x direction, at the q-th sampling instant; and are the first rows and the last rows, respectively, of ; and . The vectors , and the matrices , , , are defined in the same way as their counterparts in x-direction. The matrices , , and satisfy rotational invariance property (RIP), namely,
with
which is prerequisite to applying the JE algorithm.
Define covariance matrices
which can be implemented as
The four matrices in (14) are concatenated to form
Then, apply SVD on to have
where
spans the same subspace as does, and is the number of signals with known CF, estimated in the first stage.
Next, take the inverse of and multiply it to , and , respectively, to derive
By applying eigenvalue decomposition (EVD) on the average of these three matrices, we obtain
where is a diagonal matrix containing all the eigenvalues of . The first two equations in (19) imply that
Finally, the DOAs and CFs are estimated as
where and are the ()-th diagonal entries of and , respectively. The proposed projected Joint-ESPRIT (PJE) algorithm is listed in Algorithm 2.
| Algorithm 2 Projected Joint-ESPRIT (PJE) |
Input:
|
4. Simulations and Discussions
4.1. Simulation Setup
Two CPA(5, 6), each composed of 15 physical sensors, are deployed along x and z axes, respectively. The unit spacing is cm, which is at 5 GHz. A total of sources are considered, including CF-unknown sources and CF-known sources. For convenience, we assume the first sources have known carrier frequency of . Half of the DOAs are distributed over and the other half over , all at uniform spacing.
Each source signal is assumed to display quasi-stationary property [11]. The time-frame length of each source signal is set to . A total of 200 Monte Carlo realizations are simulated in each scenario. The signal-to-noise ratio (SNR) is defined as
The CF-known sources emit at GHz. The CFs of the remaining sources are chosen from , with GHz and MHz, where the spacing between two adjacent channels is wider than B. To evaluate the performance of the proposed algorithm, define root-mean-square error (RMSE) as
where and are the estimated DOA and actual DOA, respectively, of source m, and are the estimated CF and actual CF, respectively, of the m-th CF-unknown source.
4.2. Cramer–Rao Bound
In [24,25], the Cramer–Rao bound (CRB) of DOA estimation was analyzed, assuming that there are fewer sources than antennas. In [26,27], the CRB of 1D DOA estimation in [24,25] was extended to 2D DOA estimation. In this work, the approach in [24,25] is extended to derive the CRB of joint DOA and frequency estimation. By concatenating and in (4), a signal vector is formed as
from which its covariance matrix is estimated as
where diag . The parameters are listed in a vector as
where and .
The CRB matrix is formulated as [24,25]
where is the noise power defined in (4), is the total number of snapshots, Re denotes the real part of its complex argument, is the orthogonal complement projection based on , ∘ is the Hadamard product and , , with
where , .
The SNR defined in (21) can be rewritten as
and the CRBs in DOA and CF estimations can be represented as
4.3. Maximum Detectable Number of Sources
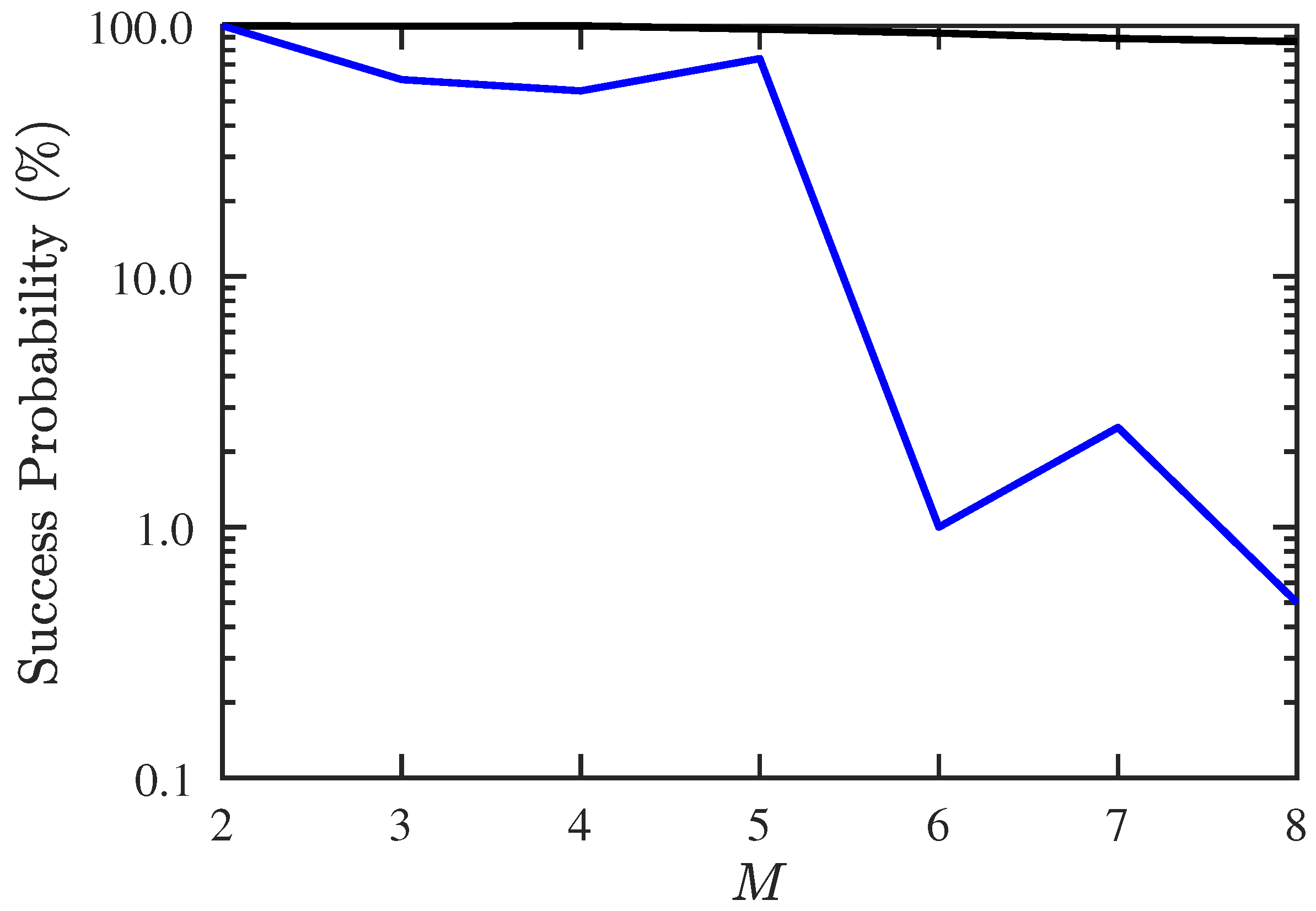
In the first scenario, we compare the maximum number of detectable signal sources when there is only one source with unknown CF (1.15 GHz). Figure 3 shows the success probability of DOA and CF estimation under different numbers of signal sources, where the success probability is defined as the number of Monte Carlo realizations with RMSE % in both DOA and CF estimation, divided by the total number of realizations. It is observed that the success probability with conventional JE [7,8] is acceptable when , and drops dramatically when . On the other hand, the success probability with the proposed PJE remains about 90% even when .
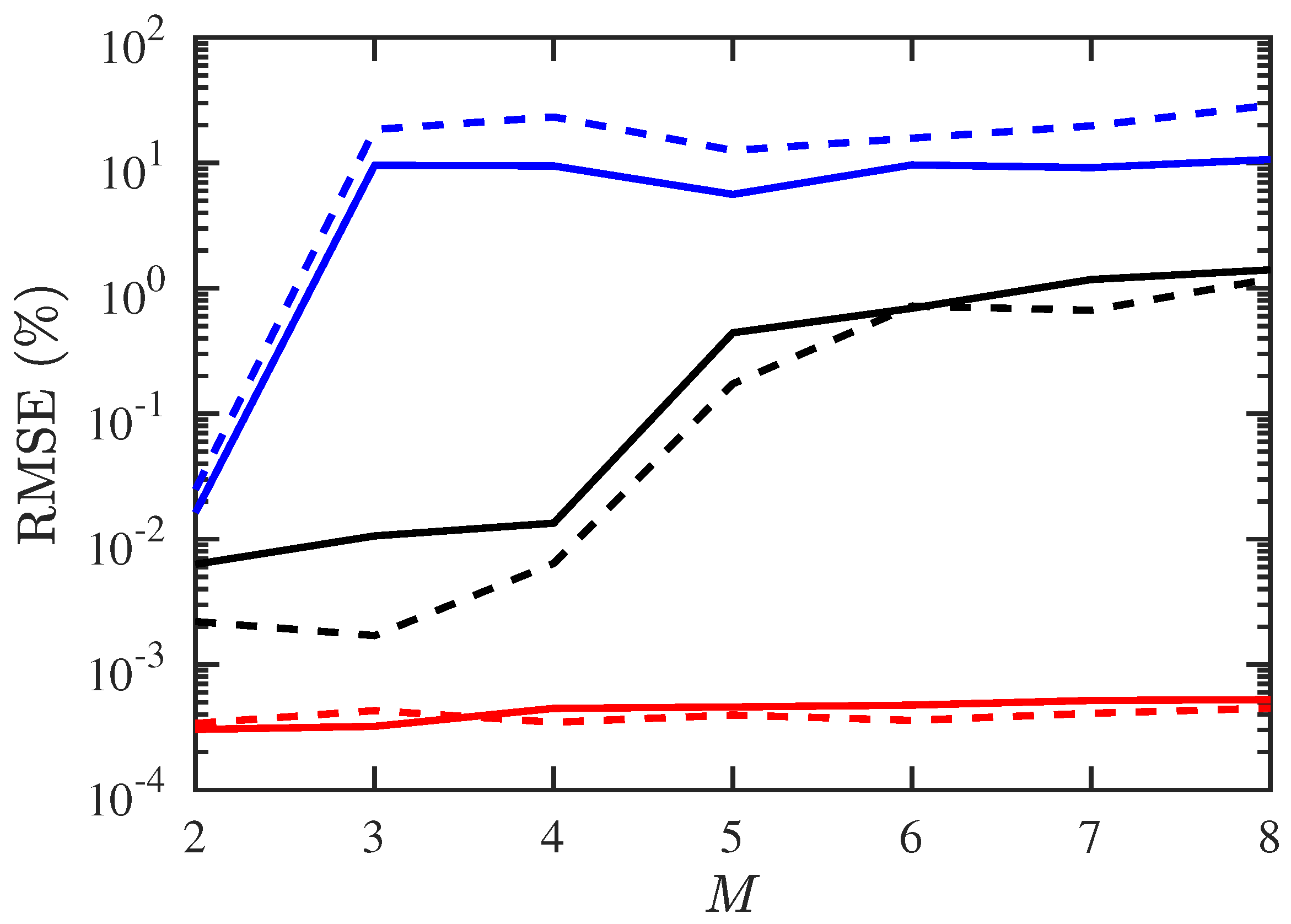
Figure 4 shows the RMSE of DOA and CF estimation, respectively, under different numbers of signal sources. The RMSE with conventional JE algorithm is higher than 5% when , while that with the proposed PJE algorithm remains about 1% even at .
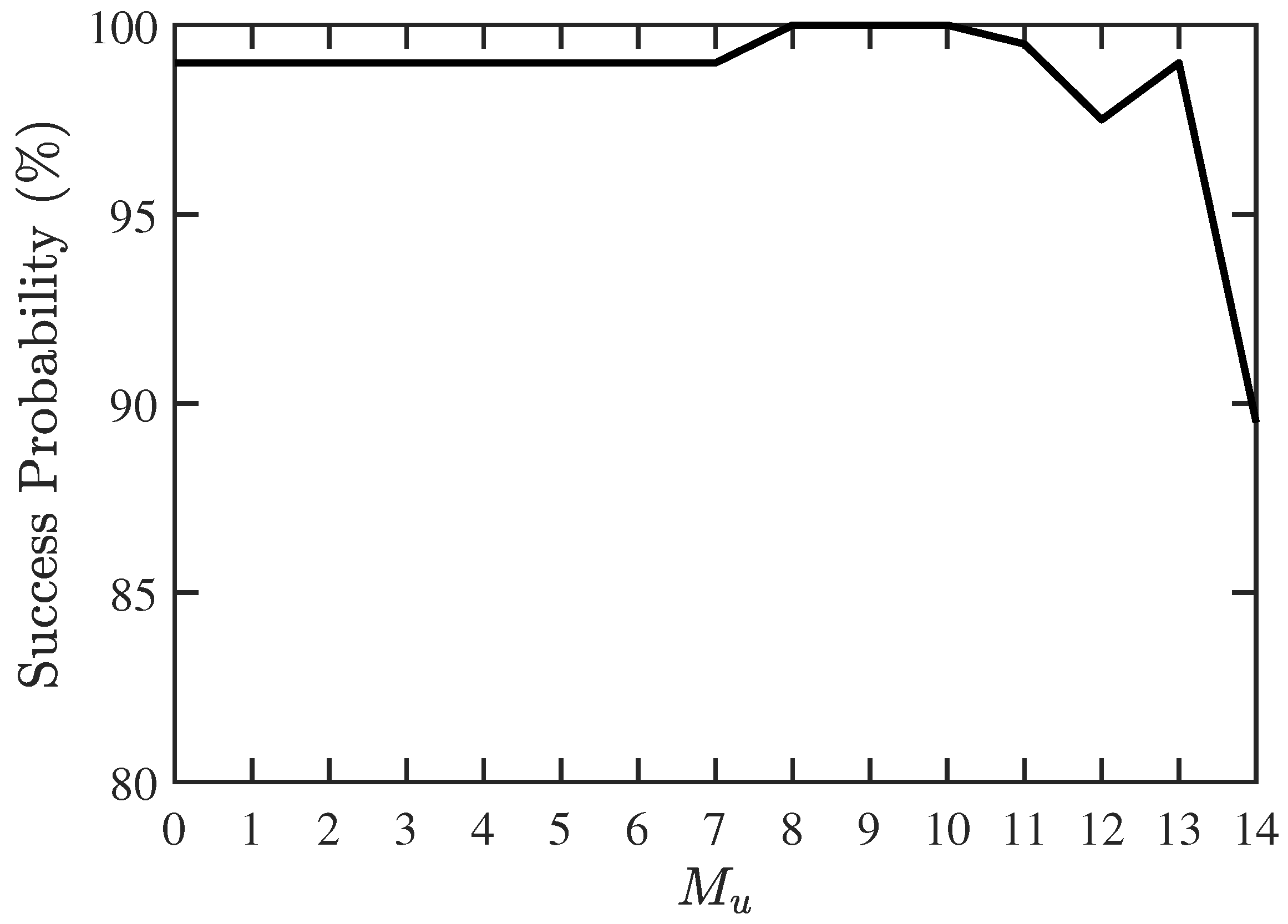
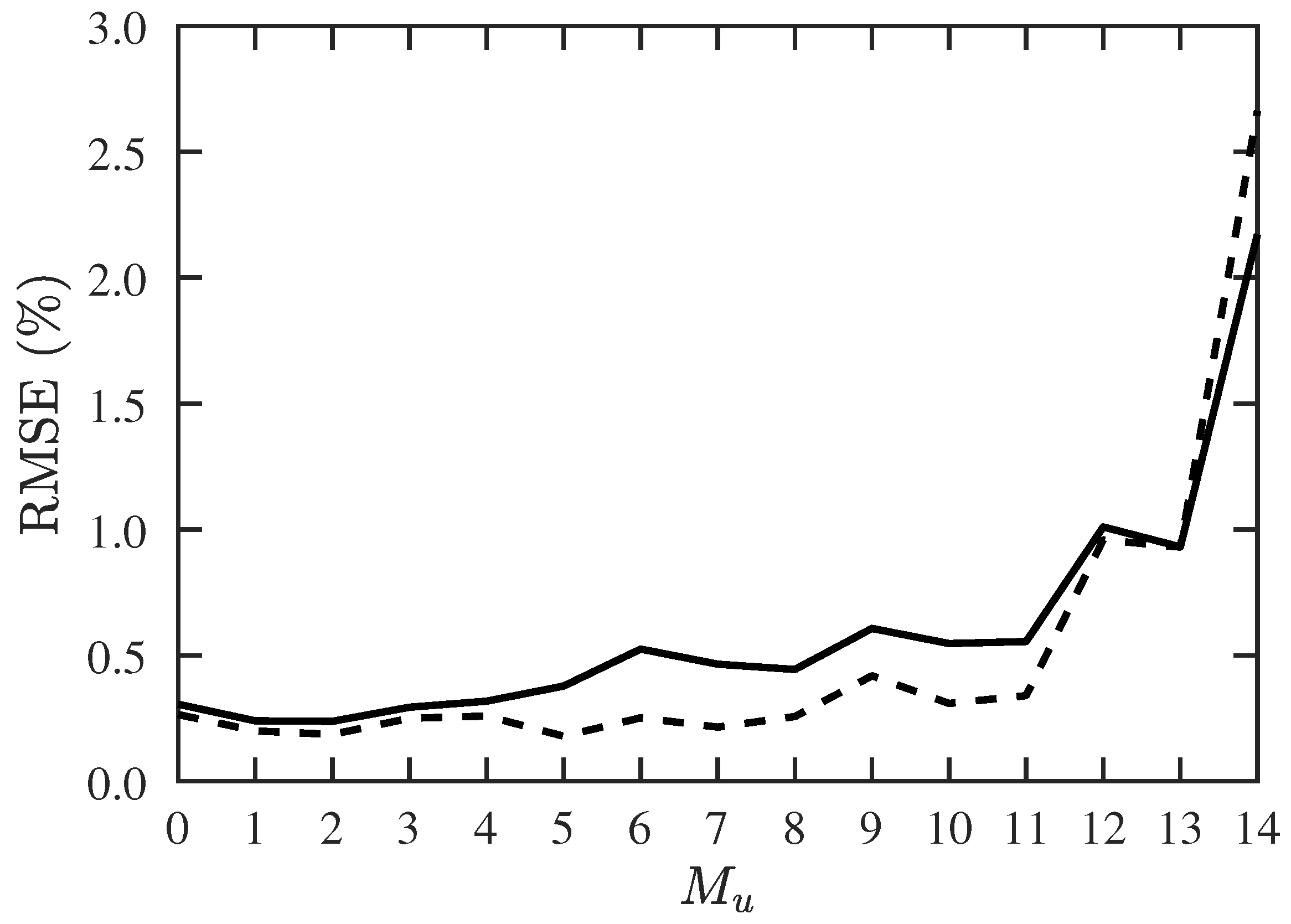
In the second scenario, we try to find the maximum detectable number of CF-unknown signal sources, under a fixed number of sources. The success probability and RMSE with the proposed PJE algorithm are shown in Figure 5 and Figure 6, respectively. The RMSE with the conventional JE algorithm is higher than 7%. The proposed two-stage algorithm works reasonably well when , and the RMSE increases dramatically when , indicating that the maximum number of CF-unknown sources is about 13 in this case.
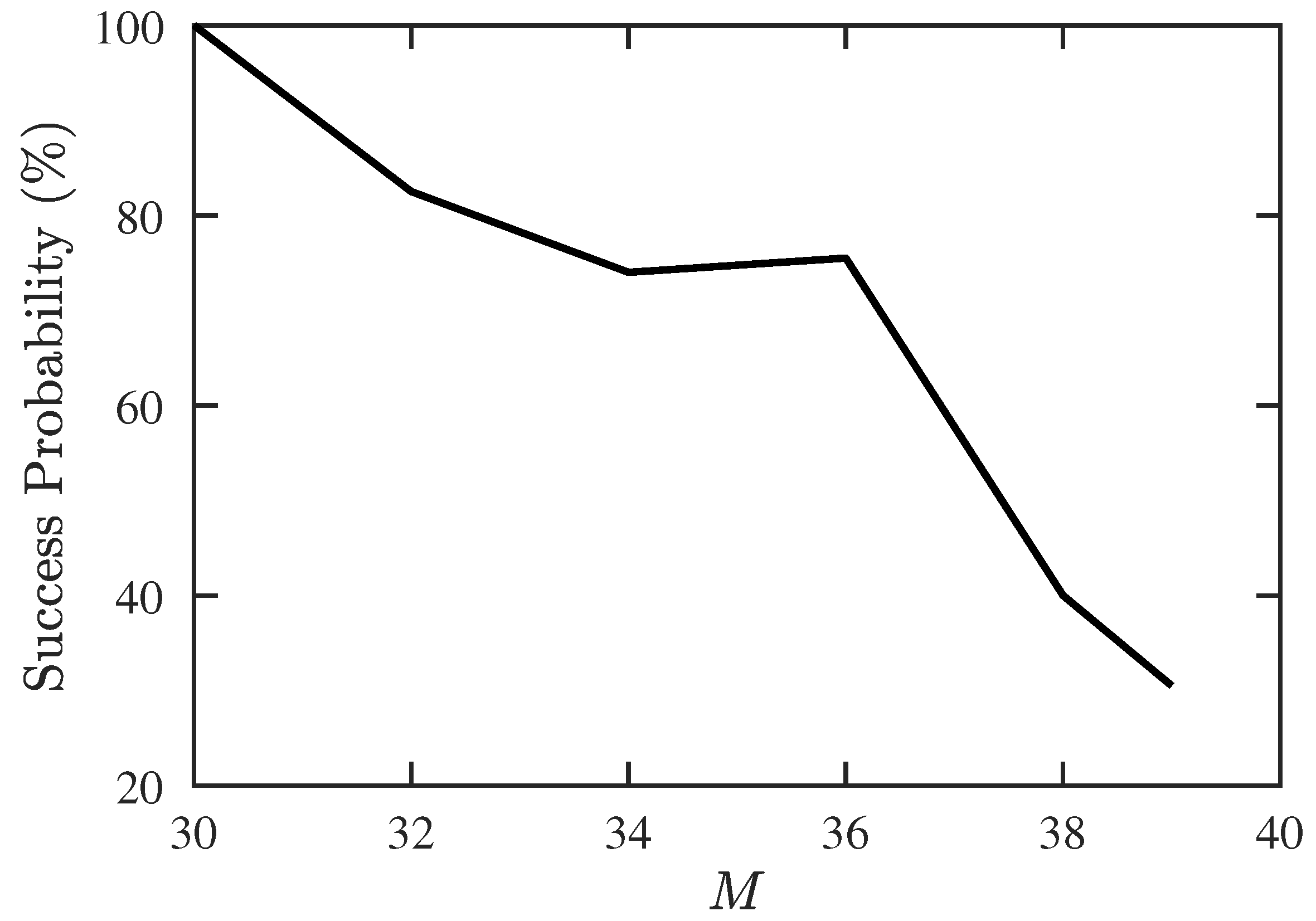
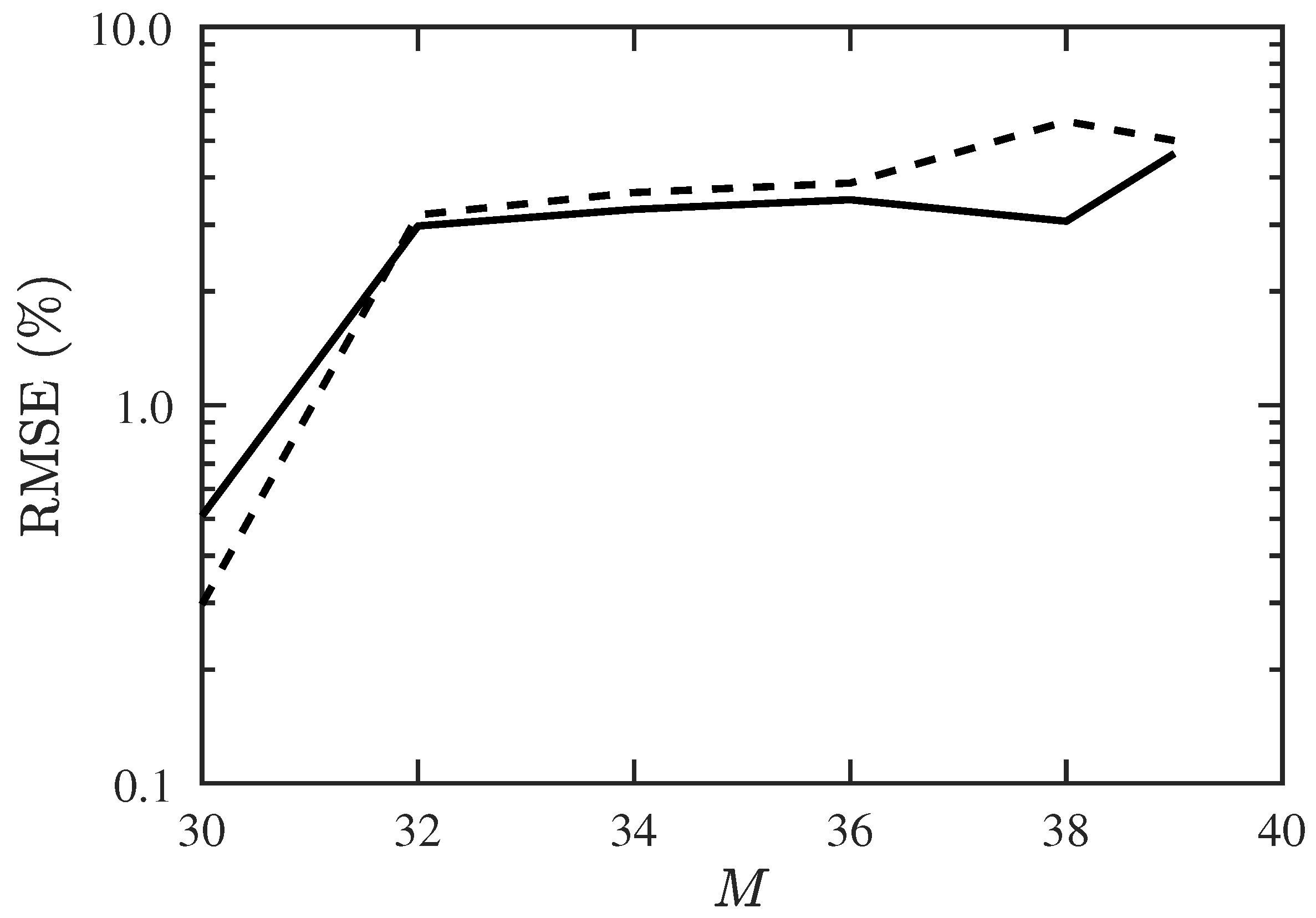
Next, we try to find the maximum allowable number of signal sources, including 10 CF-unknown sources. Figure 7 shows that the success probability decreases rapidly when and drops to 0 at . Figure 8 shows that the RMSE of DOA and CF estimation increases significantly when M is increased from 30 to 32, and stays at the same level before M reaches 39.
4.4. Detail of Proposed Two-Stage Algorithm
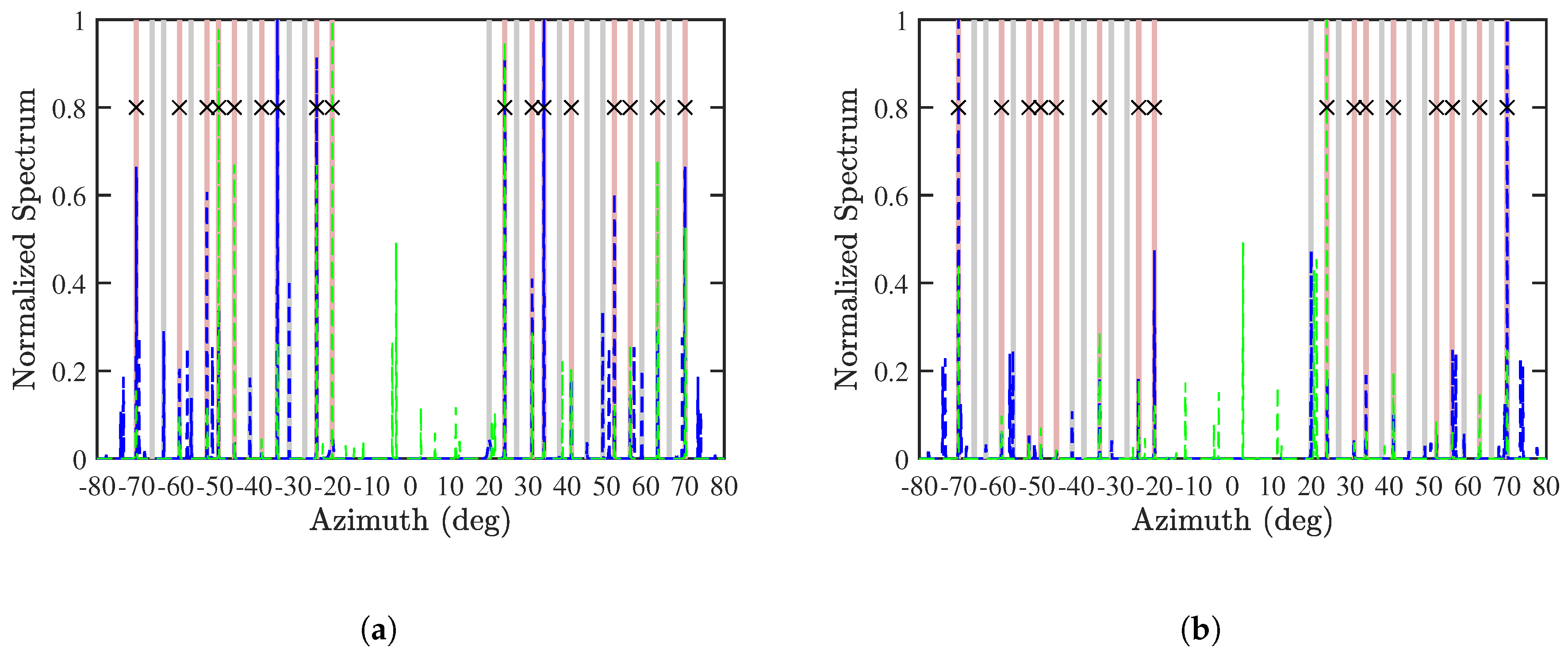
Figure 9 shows the normalized SS-MUSIC spectrum with Algorithm 1. It is observed that the blue peaks are aligned with the green peaks at the actual DOAs of CF-known sources in both cases of and . All the CF-known sources and some of the CF-unknown sources are accurately estimated.
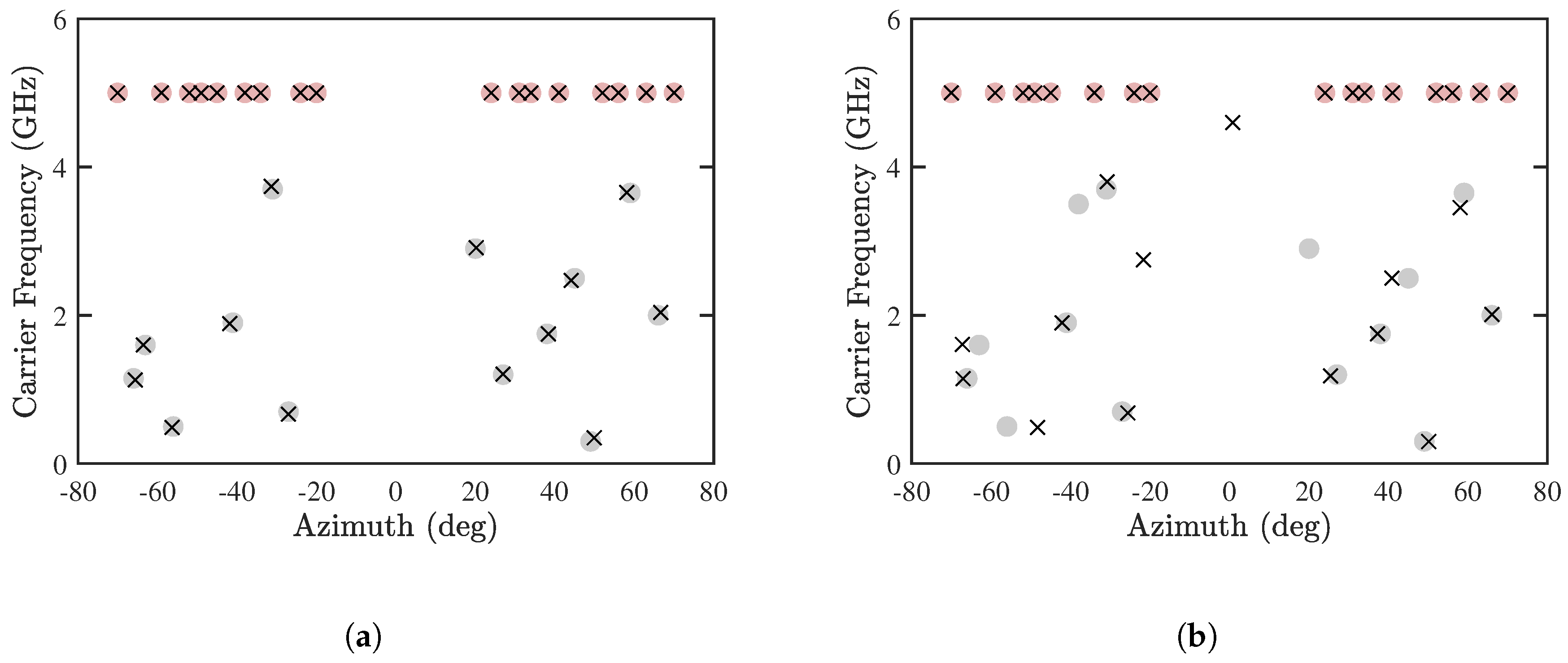
Figure 10 shows the estimated DOA and CF, with and 14, respectively. In both cases, the DOA and CF of CF-known sources are accurately estimated. Figure 10a shows that all the CF-unknown sources are accurately estimated, while Figure 10b shows that some CF-unknown sources are poorly estimated, which is consistent with the observation in Figure 6 that the maximum number of detectable CF-unknown sources is 13.
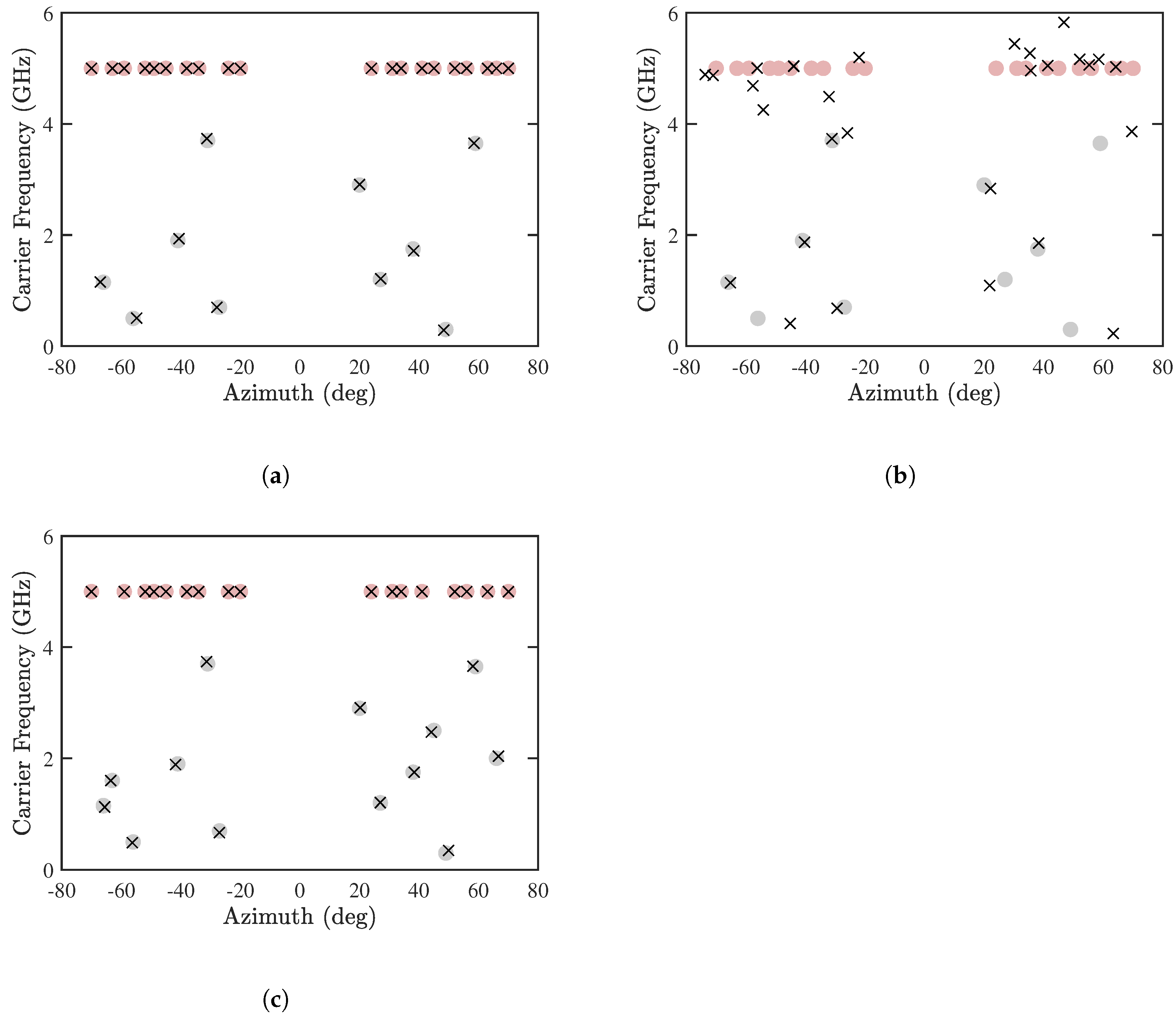
Figure 11a,b show the estimated DOA and CF by using the proposed PJE algorithm and the conventional JE algorithm [8], respectively, with and . It is observed that the proposed PJE algorithm can detect all the sources accurately, while the RMSE of either DOA or CF with the conventional JE algorithm exceeds 20%. It is interesting to observe in Figure 11b that the error of CF-known sources is higher than that of CF-unknown sources. Since the received signals are contributed by several CF-known sources directionally nearby the CF-unknown sources, a high resolution of signal phase is required to resolve these sources. The joint diagonalization in the conventional JE algorithm probably degrade such phase resolution. Figure 11c shows the results by using the proposed PJE algorithm with . All the sources are accurately estimated, with slightly larger error than in the case with .
The SS-MUSIC algorithm in [17] has been extended to deal with multiple sources, some with known CF and others with unknown CF. By matching the results from x-CPA and z-CPA, the DOAs of CF-known sources are estimated first. Then, the CF-known signals are removed from the received signals by using (11)–(13) in the proposed PJE algorithm. Finally, the conventional JE algorithm is applied to jointly estimate the DOA and CF of the remaining CF-unknown signals.
4.5. Robustness of Proposed Two-Stage Algorithm
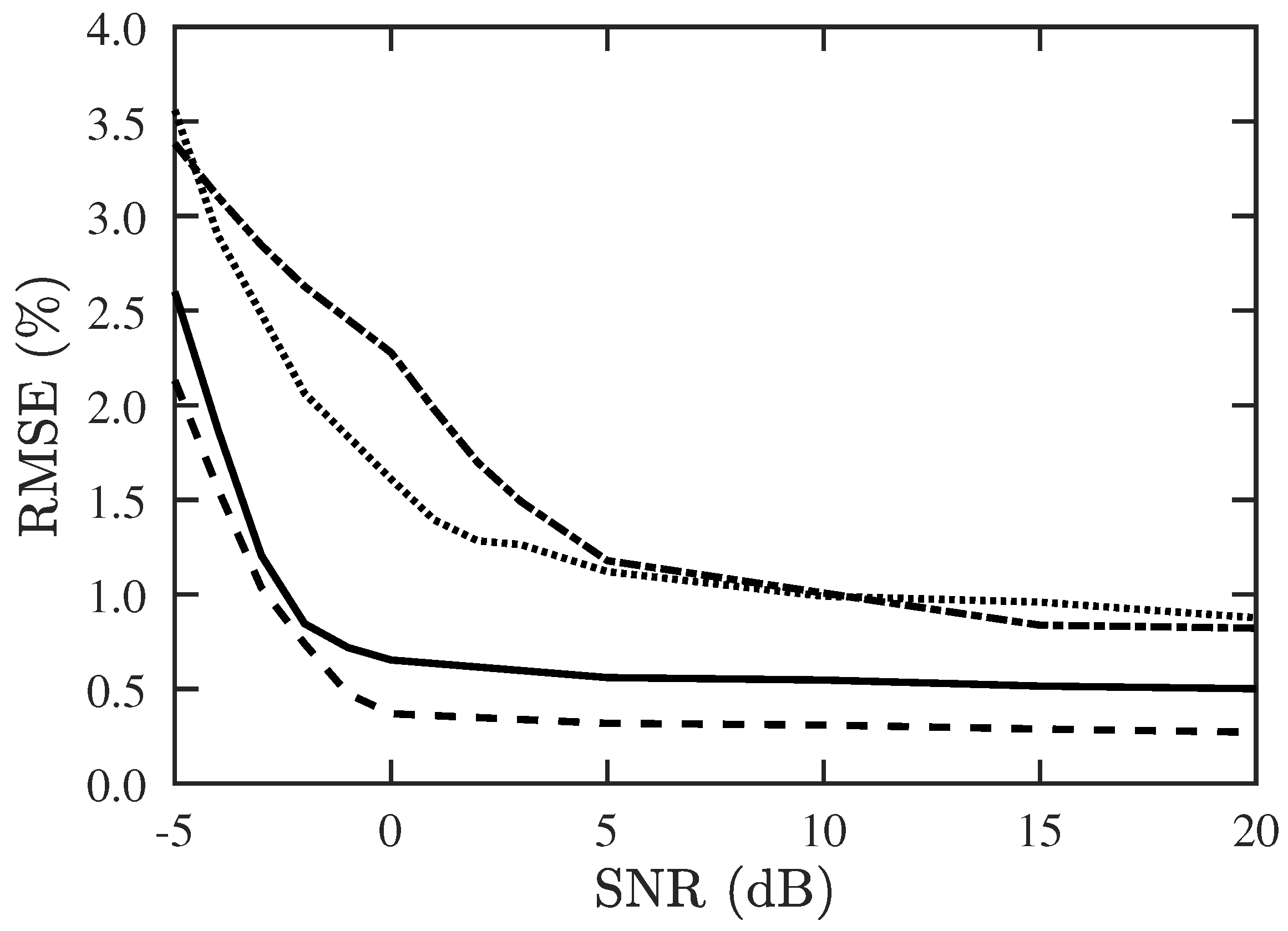
Figure 12 shows the RMSE of DOA and CF estimation with the proposed PJE algorithm, under different SNR. The RMSE is well below 1% at SNR dB if , and is below 1% at SNR dB if .
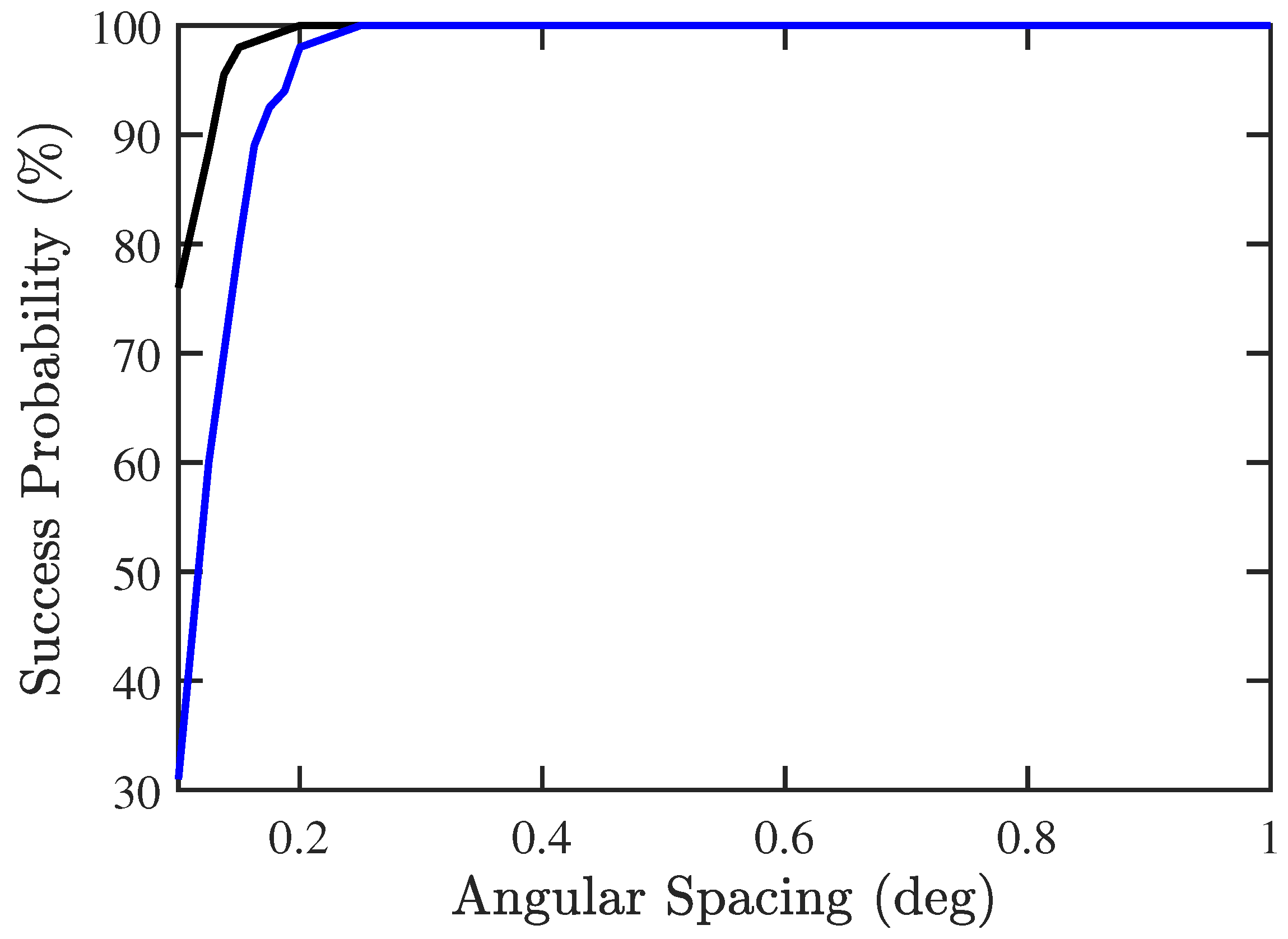
In the third scenario, we try to find the minimum angular spacing between two signal sources that can be detected by using the proposed two-stage algorithm. Consider the case of , with the incident angles of , and , respectively, where x is in the range of . Figure 13 shows that the proposed PJE algorithm can detect two signals as close as apart, with success probability higher than 95%, as compared to if conventional JE algorithm is used.
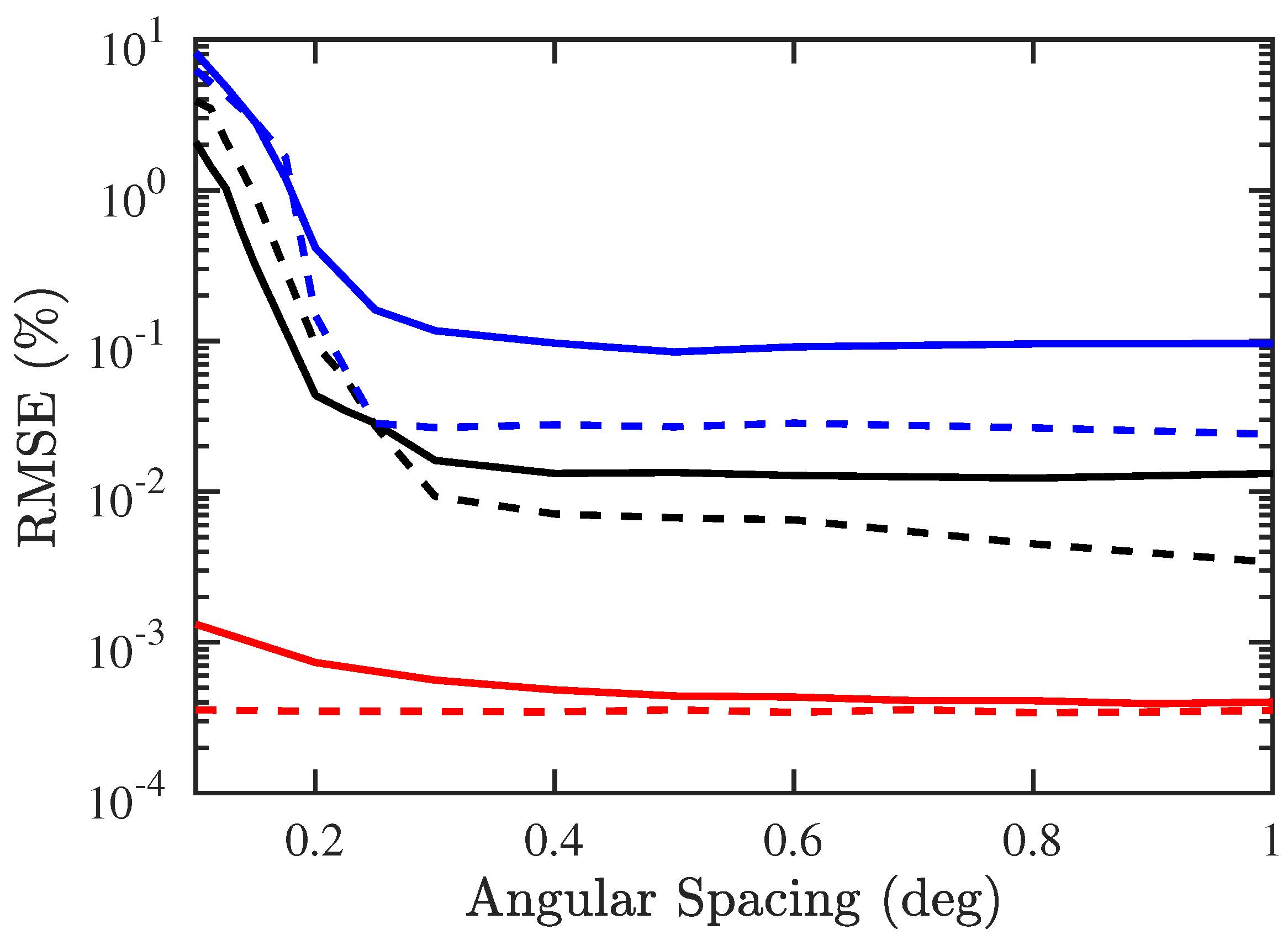
Figure 14 shows that the RMSEs of both DOA and CF estimation by using the proposed PJE algorithm are smaller than their counterparts with conventional JE algorithm when the angular spacing is smaller than .
5. Conclusions
A two-stage method is proposed to estimate the DOA of multiple signal sources by processing the received signals contributed by multiple CF-known sources and multiple CF-unknown sources. In the first stage, the intermediate results derived from the received signals of two orthogonal CPAs are matched to estimate the DOA of CF-known sources. In the second stage, the proposed PJE algorithm is applied to the residual signals, after removing the contribution of CF-known sources, to estimate the DOA and CF of the remaining sources. Simulation results show that by applying the proposed two-stage method to received signals from two orthogonal CPA(5, 6), both DOA and CF of 30 signal sources, 13 of which with unknown CF, can be accurately estimated.
Author Contributions
Conceptualization: K.-C.H. and J.-F.K.; methodology: K.-C.H. and J.-F.K.; Software: K.-C.H.; validation: K.-C.H. and J.-F.K.; formal analysis: K.-C.H. and J.-F.K.; writing-original draft preparation: K.-C.H.; writing-review and editing: J.-F.K.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef]
- Kim, J.M.; Lee, O.K.; Ye, J.C. Compressive MUSIC: Revisiting the link between compressive sensing and array signal processing. IEEE Trans. Inf. Theory 2012, 58, 278–301. [Google Scholar] [CrossRef]
- Qin, S.; Zhang, Y.D.; Amin, M.G. Generalized coprime array configurations for direction-of-arrival estimation. IEEE Trans. Signal Process. 2015, 63, 1377–1390. [Google Scholar] [CrossRef]
- Haardt, M.; Nossek, J.A. 3-D unitary ESPRIT for joint angle and carrier estimation. IEEE Int. Conf. Acoust. Speech Signal Process. 1997, 255–258. [Google Scholar] [CrossRef]
- Dong, W.; Zhang, X.; Li, J.; Bai, J. Improved ESPRIT method for joint direction-of-arrival and frequency estimation using multiple-delay output. Int. Antennas J. Propag. 2012, 2012, 309269. [Google Scholar]
- Stein, S.; Yair, O.; Cohen, D.; Eldar, Y.C. Joint spectrum sensing and direction of arrival recovery from sub-Nyquist samples. In Proceedings of the 2015 IEEE 16th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Stockholm, Sweden, 28 June–1 July 2015; pp. 331–335. [Google Scholar]
- Stein, S.; Yair, O.; Cohen, D.; Eldar, Y.C. CaSCADE: Compressed carrier and DOA estimation. IEEE Trans. Signal Process. 2017, 65, 2645–2658. [Google Scholar] [CrossRef]
- Lemma, A.N.; Van Der Veen, A.J.; Deprettere, E.F. Analysis of joint angle-frequency estimation using ESPRIT. IEEE J. Sel. Top. Signal Process. 2003, 51, 1264–1283. [Google Scholar] [CrossRef] [Green Version]
- Cui, C.; Wu, W.; Wang, W. Carrier frequency and DOA estimation of sub-Nyquist sampling multi-band sensor signals. IEEE Sens. J. 2017, 17, 7470–7478. [Google Scholar] [CrossRef]
- Mao, W.K.; Hsieh, T.H.; Chi, C.Y. DOA estimation of quasi-stationary signals with less sensors than sources and unknown spatial noise covariance: A Khatri–Rao subspace approach. IEEE Trans. Signal Process. 2010, 58, 2168–2180. [Google Scholar] [CrossRef]
- Wang, B.; Wang, W.; Gu, Y.; Lei, S. Underdetermined DOA estimation of quasi-stationary signals using a partly-calibrated array. Sensors 2017, 17, 702. [Google Scholar] [CrossRef] [PubMed]
- Hsu, K.C.; Kiang, J.F. DOA estimation of quasi-stationary signals using a partly-calibrated uniform linear array with fewer sensors than sources. Prog. Electromagn. Res. M 2018, 63, 185–193. [Google Scholar] [CrossRef]
- Pal, P.; Vaidyanathan, P.P. Nested arrays: A novel approach to array processing with enhanced degrees of freedom. IEEE Trans. Signal Process. 2010, 58, 4167–4181. [Google Scholar] [CrossRef]
- Vaidyanathan, P.P.; Pal, P. Sparse sensing with co-prime samplers and arrays. IEEE Trans. Signal Process. 2011, 59, 573–586. [Google Scholar] [CrossRef]
- Pal, P.; Vaidyanathan, P.P. Coprime sampling and the MUSIC algorithm. In Proceedings of the 2011 Digital Signal Processing and Signal Processing Education Meeting (DSP/SPE), Sedona, AZ, USA, 4–7 January 2011; pp. 289–294. [Google Scholar]
- Shen, Q.; Liu, W.; Cui, W.; Wu, S. Extension of co-prime arrays based on the fourth-order difference co-array concept. IEEE Signal Process. Lett. 2016, 23, 615–619. [Google Scholar] [CrossRef]
- Hsu, K.C.; Kiang, J.F. DOA estimation using triply primed arrays based on fourth-order statistics. Prog. Electromagn. Res. M 2018, 67, 55–64. [Google Scholar] [CrossRef]
- Chen, K.H.; Kiang, J.F. Coupling characterization of a linear dipole array to improve direction-of-arrival estimation. IEEE Trans. Antennas Propag. 2015, 63, 5056–5062. [Google Scholar] [CrossRef]
- Adve, R.S.; Sarkar, T.K. Compensation for the effects of mutual coupling on direct data domain adaptive algorithms. IEEE Trans. Antennas Propag. 2000, 48, 86–94. [Google Scholar] [CrossRef] [Green Version]
- Dandekar, K.R.; Ling, H.; Xu, G. Experimental study of mutual coupling compensation in smart antenna applications. IEEE Trans. Wirel. Commun. 2002, 1, 480–487. [Google Scholar] [CrossRef]
- Morales-Jimenez, D.; Raymond Louie, H.Y.; McKay, M.R.; Chen, Y. Analysis and design of multiple-antenna cognitive radios with multiple primary user signals. IEEE Trans. Signal Process. 2015, 63, 4925–4939. [Google Scholar] [CrossRef]
- Liu, C.L.; Vaidyanathan, P. Remarks on the spatial smoothing step in coarray MUSIC. IEEE Signal Process. Lett. 2015, 22, 1438–1442. [Google Scholar] [CrossRef]
- Stoica, P.; Nehorai, A. MUSIC, maximum likelihood, and Cramer–Rao bound. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 720–741. [Google Scholar] [CrossRef]
- Stoica, P.; Nehorai, A. Performance study of conditional and unconditional direction-of-arrival estimation. IEEE Trans. Acoust. Speech Signal Process. 1990, 38, 1783–1795. [Google Scholar] [CrossRef]
- Chen, H.; Hou, P.; Wang, Q.; Huang, L.; Yan, W.-Q. Cumulants-based Toeplitz matrices reconstruction method for 2-D coherent DOA estimation. IEEE Sens. J. 2014, 14, 2824–2832. [Google Scholar] [CrossRef]
- Wang, X.; Mao, X.; Wang, Y.; Zhang, N.; Li, B. A novel 2-D coherent DOA estimation method based on dimension reduction sparse reconstruction for orthogonal arrays. Sensors 2016, 16, 1496. [Google Scholar] [CrossRef] [PubMed]
Figure 1.
Orthogonal CPAs deployed along x and z axes, respectively, to estimate DOAs of M sources.

Figure 2.
Configuration of CPA(, ), , , ■: first ULA at spacing , ▲: second ULA at spacing , •: physical array of CPA (, ), •: second-order virtual array, ×: second-order holes, •: fourth-order virtual array, ×: fourth-order holes.
Figure 2.
Configuration of CPA(, ), , , ■: first ULA at spacing , ▲: second ULA at spacing , •: physical array of CPA (, ), •: second-order virtual array, ×: second-order holes, •: fourth-order virtual array, ×: fourth-order holes.

Figure 3.
Success probability of DOA and CF estimation under different numbers of signals, SNR = 10 dB, , . ───: proposed PJE algorithm, ───: conventional JE algorithm.
Figure 3.
Success probability of DOA and CF estimation under different numbers of signals, SNR = 10 dB, , . ───: proposed PJE algorithm, ───: conventional JE algorithm.

Figure 4.
RMSE of DOA and CF estimation under different numbers of signals, SNR dB, , . ───: RMSE of DOA with proposed PJE algorithm,
: RMSE of CF with proposed PJE algorithm, ───: RMSE of DOA with conventional JE algorithm, : RMSE of CF with conventional JE algorithm, ───: CRB of DOA estimation, : CRB of CF estimation.
Figure 4.
RMSE of DOA and CF estimation under different numbers of signals, SNR dB, , . ───: RMSE of DOA with proposed PJE algorithm,
: RMSE of CF with proposed PJE algorithm, ───: RMSE of DOA with conventional JE algorithm, : RMSE of CF with conventional JE algorithm, ───: CRB of DOA estimation, : CRB of CF estimation.

Figure 5.
Success probability of DOA and CF estimation with proposed PJE algorithm, under different numbers of signals with unknown CF, SNR dB, , .
Figure 5.
Success probability of DOA and CF estimation with proposed PJE algorithm, under different numbers of signals with unknown CF, SNR dB, , .

Figure 6.
RMSE of DOA and CF estimation with proposed PJE algorithm, under different numbers of signals with unknown CF, SNR dB, , . ───: RMSE of DOA, : RMSE of CF.
Figure 6.
RMSE of DOA and CF estimation with proposed PJE algorithm, under different numbers of signals with unknown CF, SNR dB, , . ───: RMSE of DOA, : RMSE of CF.

Figure 7.
Success probability of DOA and CF estimation with proposed PJE algorithm, under different numbers of signal sources, SNR dB, , .
Figure 7.
Success probability of DOA and CF estimation with proposed PJE algorithm, under different numbers of signal sources, SNR dB, , .

Figure 8.
RMSE of DOA and CF estimation with proposed PJE algorithm, under different numbers of signal sources, SNR dB, , . ───: RMSE of DOA, : RMSE of CF.
Figure 8.
RMSE of DOA and CF estimation with proposed PJE algorithm, under different numbers of signal sources, SNR dB, , . ───: RMSE of DOA, : RMSE of CF.

Figure 9.
Normalized SS-MUSIC spectrum with Algorithm 1, (a) and (b) , SNR = 10 dB, , . ───: actual DOA of CF-known sources, ───: actual DOA of CF-unknown sources, : estimated DOA with x-axis CPA, : estimated DOA with z-axis CPA, ×: matched DOA.
Figure 9.
Normalized SS-MUSIC spectrum with Algorithm 1, (a) and (b) , SNR = 10 dB, , . ───: actual DOA of CF-known sources, ───: actual DOA of CF-unknown sources, : estimated DOA with x-axis CPA, : estimated DOA with z-axis CPA, ×: matched DOA.

Figure 10.
Joint estimation of DOA and CF with proposed PJE algorithm, (a) and (b) , SNR = 10 dB, , . •: CF-known sources, •: CF-unknown sources, ×: estimated sources.
Figure 10.
Joint estimation of DOA and CF with proposed PJE algorithm, (a) and (b) , SNR = 10 dB, , . •: CF-known sources, •: CF-unknown sources, ×: estimated sources.

Figure 11.
Joint estimation of DOA and CF, SNR = 10 dB, , . (a) Proposed PJE algorithm with , (b) conventional JE algorithm with , (c) proposed PJE algorithm with . •: CF-known sources, •: CF-unknown sources, ×: estimated sources.
Figure 11.
Joint estimation of DOA and CF, SNR = 10 dB, , . (a) Proposed PJE algorithm with , (b) conventional JE algorithm with , (c) proposed PJE algorithm with . •: CF-known sources, •: CF-unknown sources, ×: estimated sources.

Figure 12.
RMSE of DOA and CF estimation versus SNR, with proposed PJE algorithm, , . ───: RMSE of DOA with , : RMSE of CF with , : RMSE of DOA with , ⋯: RMSE of CF with .
Figure 12.
RMSE of DOA and CF estimation versus SNR, with proposed PJE algorithm, , . ───: RMSE of DOA with , : RMSE of CF with , : RMSE of DOA with , ⋯: RMSE of CF with .

Figure 13.
Success probability of DOA and CF estimation versus angular spacing, SNR dB, , , . ───: proposed PJE algorithm, ───: conventional JE algorithm.
Figure 13.
Success probability of DOA and CF estimation versus angular spacing, SNR dB, , , . ───: proposed PJE algorithm, ───: conventional JE algorithm.

Figure 14.
RMSE of DOA and CF estimation versus angular spacing, SNR dB, , , . ───: RMSE of DOA with proposed PJE algorithm, : RMSE of CF with proposed PJE algorithm, ───: RMSE of DOA with conventional JE algorithm, : RMSE of CF with conventional JE algorithm, ───: CRB of DOA estimation, : CRB of CF estimation.
Figure 14.
RMSE of DOA and CF estimation versus angular spacing, SNR dB, , , . ───: RMSE of DOA with proposed PJE algorithm, : RMSE of CF with proposed PJE algorithm, ───: RMSE of DOA with conventional JE algorithm, : RMSE of CF with conventional JE algorithm, ───: CRB of DOA estimation, : CRB of CF estimation.

© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Hsu, K.-C.; Kiang, J.-F. Joint Estimation of DOA and Frequency of Multiple Sources with Orthogonal Coprime Arrays. Sensors 2019, 19, 335. https://doi.org/10.3390/s19020335
AMA Style
Hsu K-C, Kiang J-F. Joint Estimation of DOA and Frequency of Multiple Sources with Orthogonal Coprime Arrays. Sensors. 2019; 19(2):335. https://doi.org/10.3390/s19020335
Chicago/Turabian StyleHsu, Kai-Chieh, and Jean-Fu Kiang. 2019. "Joint Estimation of DOA and Frequency of Multiple Sources with Orthogonal Coprime Arrays" Sensors 19, no. 2: 335. https://doi.org/10.3390/s19020335
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.