ClusterMap Building and Relocalization in Urban Environments for Unmanned Vehicles


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Work
3. ClusterMap Building
3.1. SLAM for ClusterMap Building
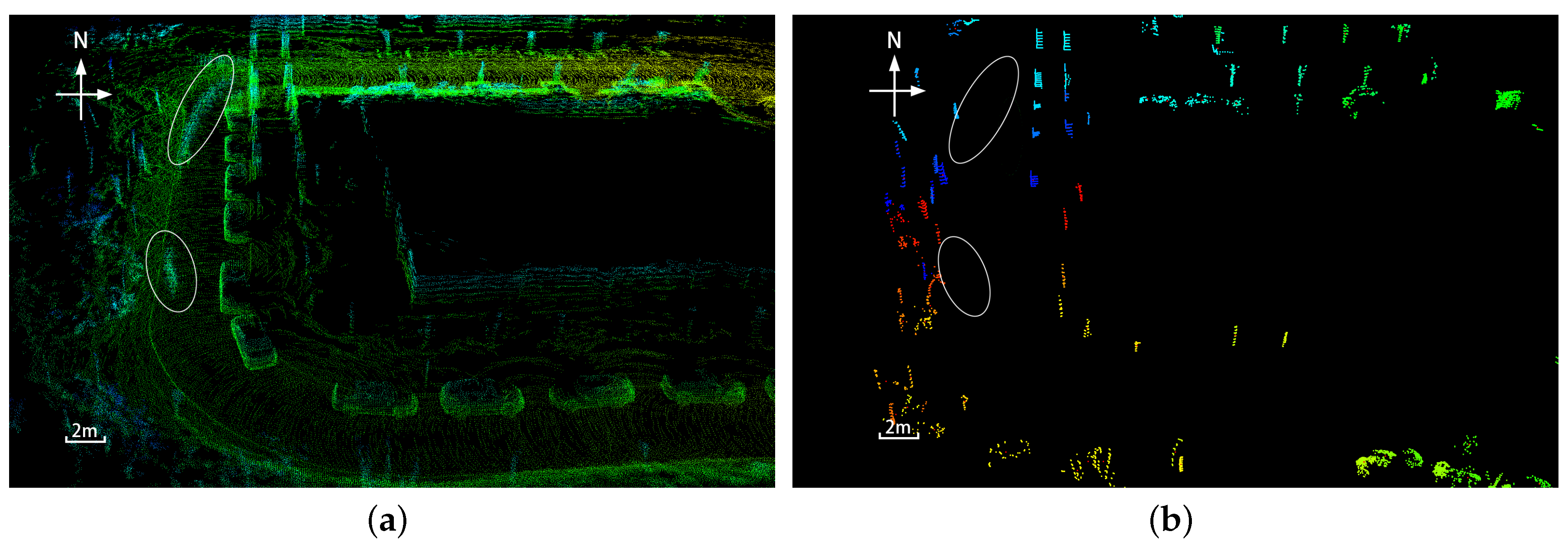
3.2. Building ClusterMap
| Algorithm 1 Cluster Registration. |
| Require::Set of registered clusters Require::Cluster waiting for registration Require::Three clusters closest to in 1: for each do 2: if sqrDist()>maxDist then 3: ; break; 4: end if 5: if sqrDist()<minDist then 6: ; 7: else 8: ; 9: for all do 10: if radiusSearch(,,rad)>minNum then 11: ; 12: end if 13: end for 14: if >sizeof() / thresholdNum then 15: ; 16: end if 17: end if 18: end for |
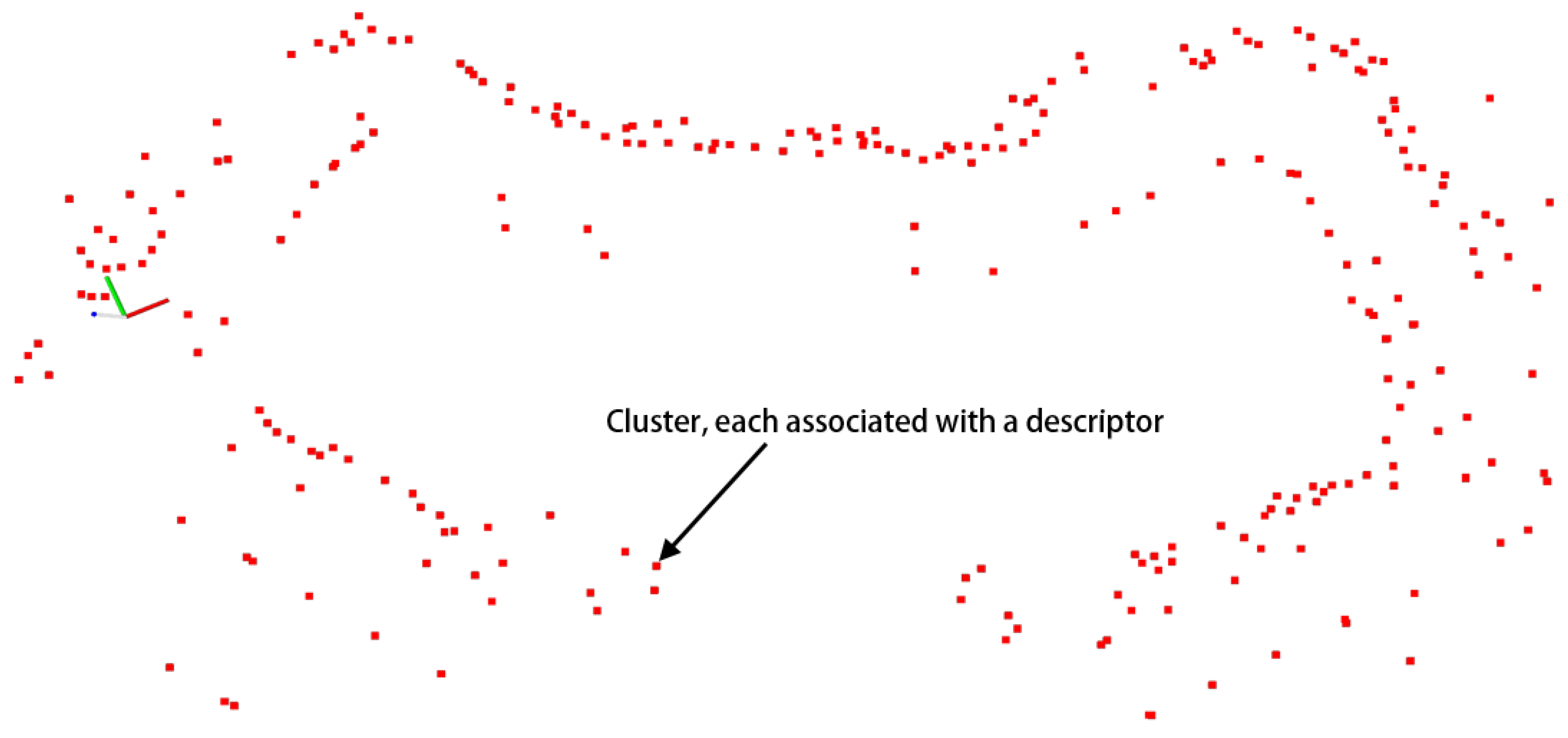
3.3. Cluster Descriptor for Clusters in ClusterMap
4. Relocalization Algorithm Based on ClusterMap
4.1. Cluster Descriptor Matching
4.2. Removing Outliers Based on Geometric Verification
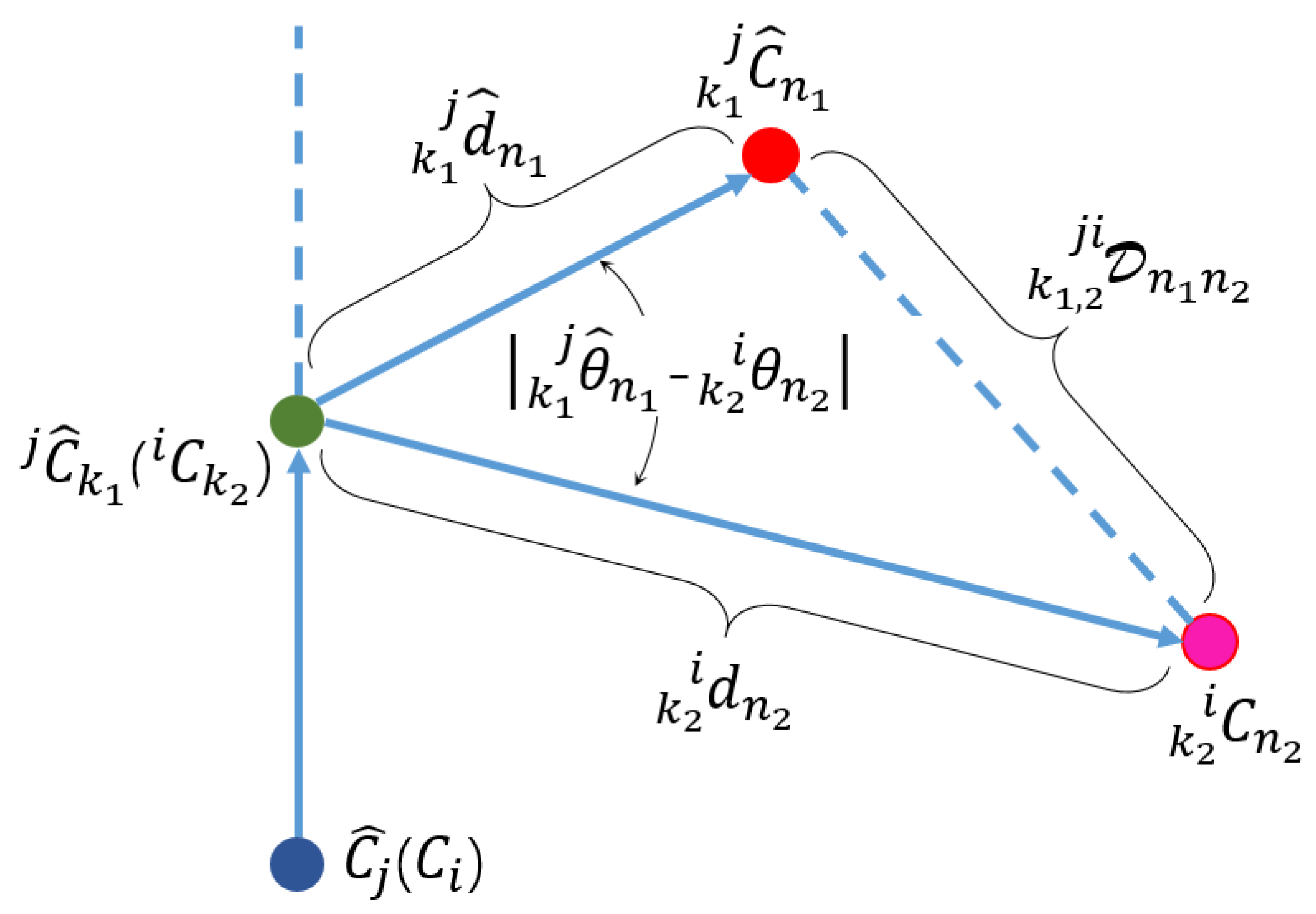
- Length condition: Use distances between clusters included in to filter out some unsatisfied candidates. In any other set, , a cluster, , should be found so thatwhere T is the same as the threshold mentioned above.
- Inclusion condition: Let be the maximum distance between and all other clusters in the local ClusterMap . Therefore, clusters are present in the circle, with as the center and as the radius. Correspondingly, in the global ClusterMap, ~ clusters are available in the circle, with as the center and as the radius. The cluster is preserved only if enough different groups exist in this circular range.
- Triangular condition: A cluster and every two other clusters in can form a base triangle (the blue dotted triangle shown in Figure 7c); if clusters in the corresponding groups can form a triangle similar to the base one, then the cluster is retained. By randomly selecting two clusters from except , denoted as and , and a should be derived from and , respectively, satisfyingand
5. Experiments
5.1. Evaluation on KITTI Data Set
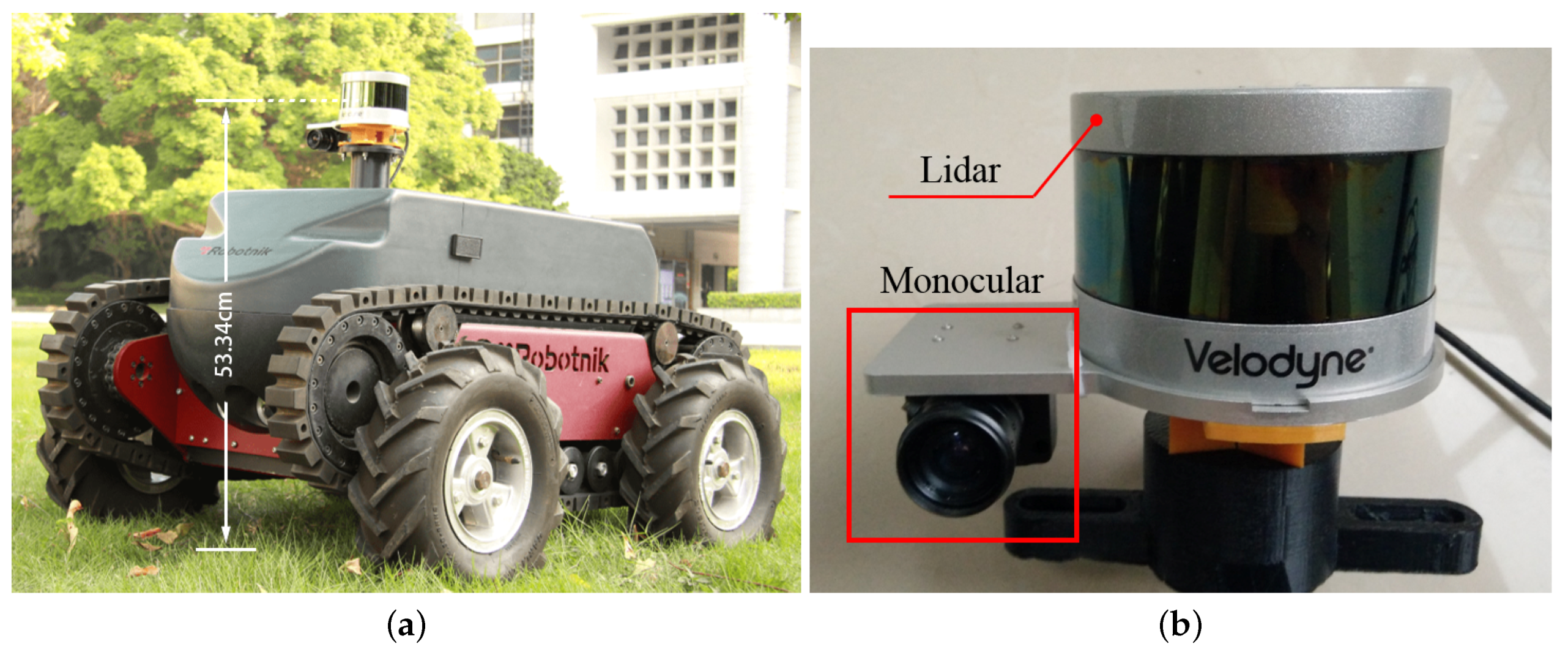
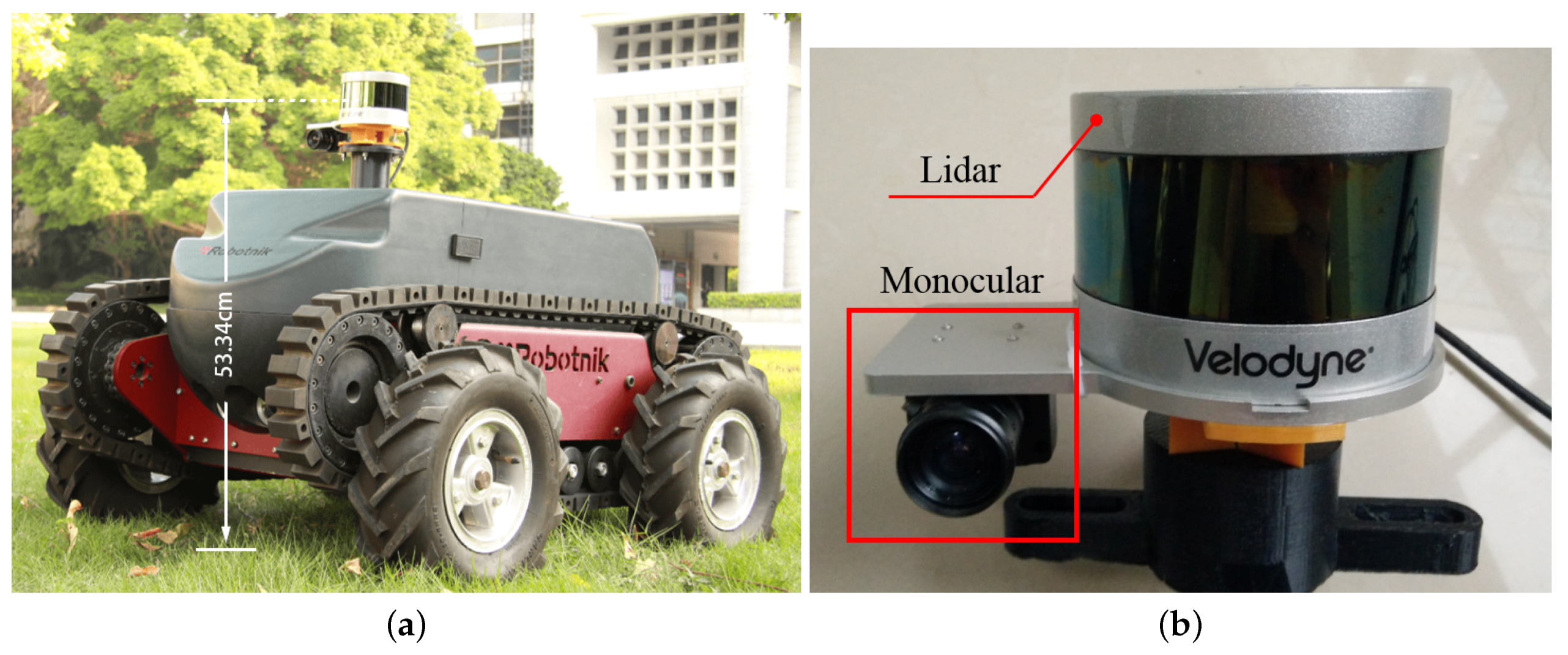
5.2. Evaluation with Our Experimental Vehicle
5.3. Parameters Evaluation
5.4. Discussion
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| SLAM | Simultaneous Localization and Mapping |
| PFHs | Point Feature Histograms |
| FPFHs | Fast Point Feature Histograms |
References
- Cadena, C.; Carlone, L.; Carrillo, H.; Latif, Y.; Scaramuzza, D.; Neira, J.; Reid, I.D.; Leonard, J.J. Past, Present, and Future of Simultaneous Localization and Mapping: Toward the Robust-Perception Age. IEEE Trans. Robot. 2016, 32, 1309–1332. [Google Scholar] [CrossRef]
- Zhang, J.; Singh, S. Laser–visual–inertial odometry and mapping with high robustness and low drift. J. Field Robot. 2018, 35, 1242–1264. [Google Scholar] [CrossRef]
- Wang, H.; Guo, D.; Liang, X.; Chen, W.; Hu, G.; Leang, K.K. Adaptive vision-based leader-follower formation control of mobile robots. IEEE Trans. Ind. Electron. 2017, 64, 2893–2902. [Google Scholar] [CrossRef]
- Lin, L.S.; Yang, Y.J.; Cheng, H.; Chen, X.C. Autonomous Vision-Based Aerial Grasping for Rotorcraft Unmanned Aerial Vehicles. Sensors 2019, 19, 3410. [Google Scholar] [CrossRef] [PubMed]
- Schauwecker, K.; Zell, A. Robust and efficient volumetric occupancy mapping with an application to stereo vision. In Proceedings of the IEEE International Conference on Robotics and Automation, Hong Kong, China, 31 May–7 June 2014; pp. 6102–6107. [Google Scholar]
- Bogoslavskyi, I.; Stachniss, C. Efficient online segmentation for sparse 3d laser scans. Photogramm. Remote Sens. Geoinf. Sci. 2017, 85, 41–52. [Google Scholar] [CrossRef]
- Lynen, S.; Achtelik, M.W.; Weiss, S.; Chli, M.; Siegwart, R. A robust and modular multisensor fusion approach applied to mav navigation. In Proceedings of the Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 November 2013; pp. 3923–3929. [Google Scholar]
- Wan, G.; Yang, X.; Cai, R.; Li, H.; Wang, H.; Song, S. Robust and Precise Vehicle Localization based on Multi-sensor Fusion in Diverse City Scenes. arXiv 2017, arXiv:1711.05805. [Google Scholar]
- Mur-Artal, R.; Montiel, J.M.M.; Tardos, J.D. ORB-SLAM: A versatile and accurate monocular SLAM system. IEEE Trans. Robot. 2015, 31, 1147–1163. [Google Scholar] [CrossRef]
- Engel, J.; Schöps, T.; Cremers, D. LSD-SLAM: Large-scale direct monocular SLAM. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; pp. 834–849. [Google Scholar]
- Engel, J.; Koltun, V.; Cremers, D. Direct Sparse Odometry. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 611–625. [Google Scholar] [CrossRef] [PubMed]
- Mur-Artal, R.; Tardós, J.D. Orb-slam2: An open-source slam system for monocular, stereo, and rgb-d cameras. IEEE Trans. Robot. 2017, 33, 1255–1262. [Google Scholar] [CrossRef]
- Grisetti, G.; Stachniss, C.; Burgard, W. Improved techniques for grid mapping with rao-blackwellized particle filters. IEEE Trans. Robot. 2007, 23, 34–46. [Google Scholar] [CrossRef]
- Hess, W.; Kohler, D.; Rapp, H.; Andor, D. Real-time loop closure in 2D LIDAR SLAM. In Proceedings of the Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1271–1278. [Google Scholar]
- Zhang, J.; Singh, S. Low-drift and real-time lidar odometry and mapping. Auton. Robot. 2017, 41, 401–416. [Google Scholar] [CrossRef]
- Pfrunder, A.; Borges, P.V.; Romero, A.R.; Catt, G.; Elfes, A. Real-time autonomous ground vehicle navigation in heterogeneous environments using a 3D LiDAR. In Proceedings of the Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 2601–2608. [Google Scholar]
- Opromolla, R.; Fasano, G.; Rufino, G.; Grassi, M.; Savvaris, A. LIDAR-inertial integration for UAV localization and mapping in complex environments. In Proceedings of the Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; pp. 649–656. [Google Scholar]
- Brenneke, C.; Wulf, O.; Wagner, B. Using 3d laser range data for slam in outdoor environments. In Proceedings of the Intelligent Robots and Systems, Las Vegas, NV, USA, 27–31 October 2003; Volume 1, pp. 188–193. [Google Scholar]
- Wang, L.; Zhang, Y.; Wang, J. Map-based localization method for autonomous vehicles using 3D-LIDAR. IFAC-Papersonline 2017, 50, 276–281. [Google Scholar] [CrossRef]
- Zhang, J.; Kaess, M.; Singh, S. A real-time method for depth enhanced visual odometry. Auton. Robot. 2017, 41, 31–43. [Google Scholar] [CrossRef]
- Lenac, K.; Kitanov, A.; Cupec, R.; Petrović, I. Fast planar surface 3D SLAM using LIDAR. Robot. Auton. Syst. 2017, 92, 197–220. [Google Scholar] [CrossRef]
- Zhu, Z.; Yang, S.; Dai, H.; Li, F. Loop Detection and Correction of 3D Laser-Based SLAM with Visual Information. In Proceedings of the 31st International Conference on Computer Animation and Social Agents, Beijing, China, 21–23 May 2018; pp. 53–58. [Google Scholar]
- Chen, H.; Huang, H.; Qin, Y.; Liu, Y. Vision and Laser Fused SLAM in Indoor Environments with Multi-Robot System. Assem. Autom. 2019, 39. [Google Scholar] [CrossRef]
- Karami, E.; Prasad, S.; Shehata, M.S. Image Matching Using SIFT, SURF, BRIEF and ORB: Performance Comparison for Distorted Images. arXiv 2017, arXiv:1710.02726. [Google Scholar]
- Bosse, M.; Zlot, R. Place recognition using keypoint voting in large 3D lidar datasets. In Proceedings of the Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 2677–2684. [Google Scholar]
- Gawel, A.; Cieslewski, T.; Dubé, R.; Bosse, M.; Siegwart, R.; Nieto, J. Structure-based vision-laser matching. In Proceedings of the 2016 IEEE/RSJ International Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 182–188. [Google Scholar]
- Dubé, R.; Dugas, D.; Stumm, E.; Nieto, J.; Siegwart, R.; Cadena, C. Segmatch: Segment based loop-closure for 3d point clouds. arXiv 2016, arXiv:1609.07720. [Google Scholar]
- Dubé, R.; Cramariuc, A.; Dugas, D.; Nieto, J.; Siegwart, R.; Cadena, C. SegMap: 3D Segment Mapping using Data-Driven Descriptors. In Proceedings of the Robotics: Science and Systems (RSS), Pittsburgh, PA, USA, 26–30 June 2018. [Google Scholar]
- Finman, R.; Paull, L.; Leonard, J.J. Toward object-based place recognition in dense rgb-d maps. In Proceedings of the ICRA Workshop Visual Place Recognition in Changing Environments, Seattle, WA, USA, 26–30 May 2015. [Google Scholar]
- Rusu, R.B.; Blodow, N.; Marton, Z.C.; Beetz, M. Aligning point cloud views using persistent feature histograms. In Proceedings of the Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 3384–3391. [Google Scholar]
- Rusu, R.B.; Blodow, N.; Beetz, M. Fast point feature histograms (FPFH) for 3D registration. In Proceedings of the Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3212–3217. [Google Scholar]
- Scaramuzza, D.; Fraundorfer, F. Visual odometry [tutorial]. IEEE Robot. Autom. Mag. 2011, 18, 80–92. [Google Scholar] [CrossRef]
- Dhall, A.; Chelani, K.; Radhakrishnan, V.; Krishna, K.M. LiDAR-Camera Calibration using 3D–3D Point correspondences. arXiv 2017, arXiv:1705.09785. [Google Scholar]
- Geiger, A.; Lenz, P.; Stiller, C.; Urtasun, R. Vision meets Robotics: The KITTI Dataset. Int. J. Robot. Res. 2013. [Google Scholar] [CrossRef]















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, Z.; Chen, H.; Li, S.; Liu, Y. ClusterMap Building and Relocalization in Urban Environments for Unmanned Vehicles. Sensors 2019, 19, 4252. https://doi.org/10.3390/s19194252
Pan Z, Chen H, Li S, Liu Y. ClusterMap Building and Relocalization in Urban Environments for Unmanned Vehicles. Sensors. 2019; 19(19):4252. https://doi.org/10.3390/s19194252
Chicago/Turabian StylePan, Zhichen, Haoyao Chen, Silin Li, and Yunhui Liu. 2019. "ClusterMap Building and Relocalization in Urban Environments for Unmanned Vehicles" Sensors 19, no. 19: 4252. https://doi.org/10.3390/s19194252
APA StylePan, Z., Chen, H., Li, S., & Liu, Y. (2019). ClusterMap Building and Relocalization in Urban Environments for Unmanned Vehicles. Sensors, 19(19), 4252. https://doi.org/10.3390/s19194252