A Robust Balance-Control Framework for the Terrain-Blind Bipedal Walking of a Humanoid Robot on Unknown and Uneven Terrain

Abstract
:1. Introduction
2. Control Framework and Robot System
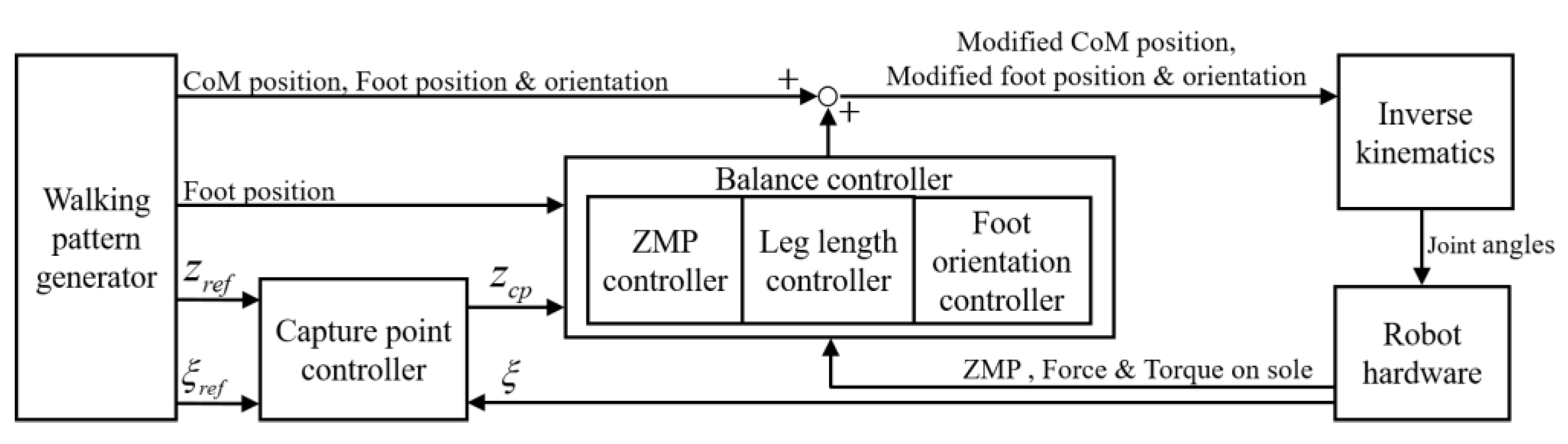
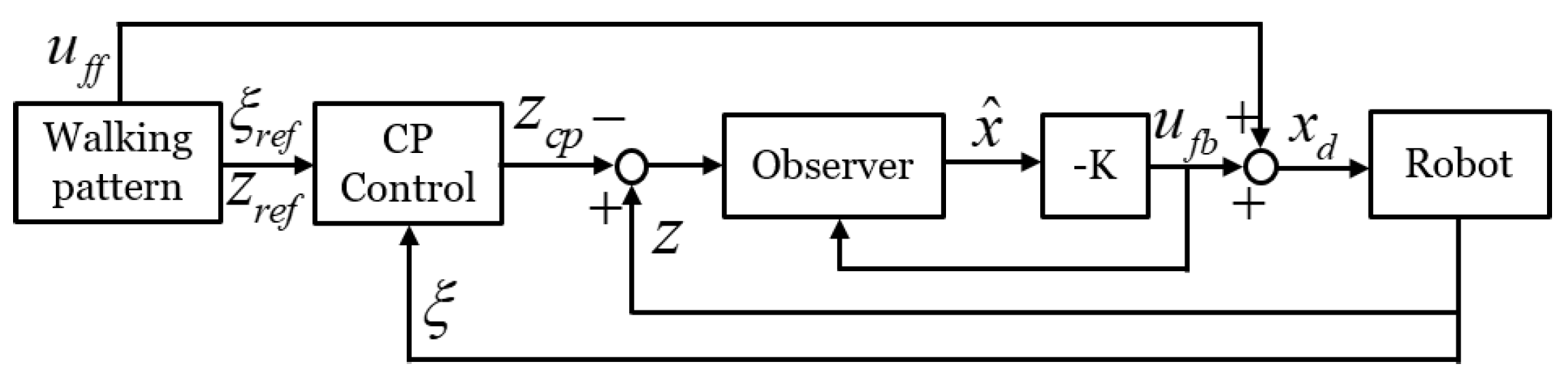
2.1. Balance Control Framework
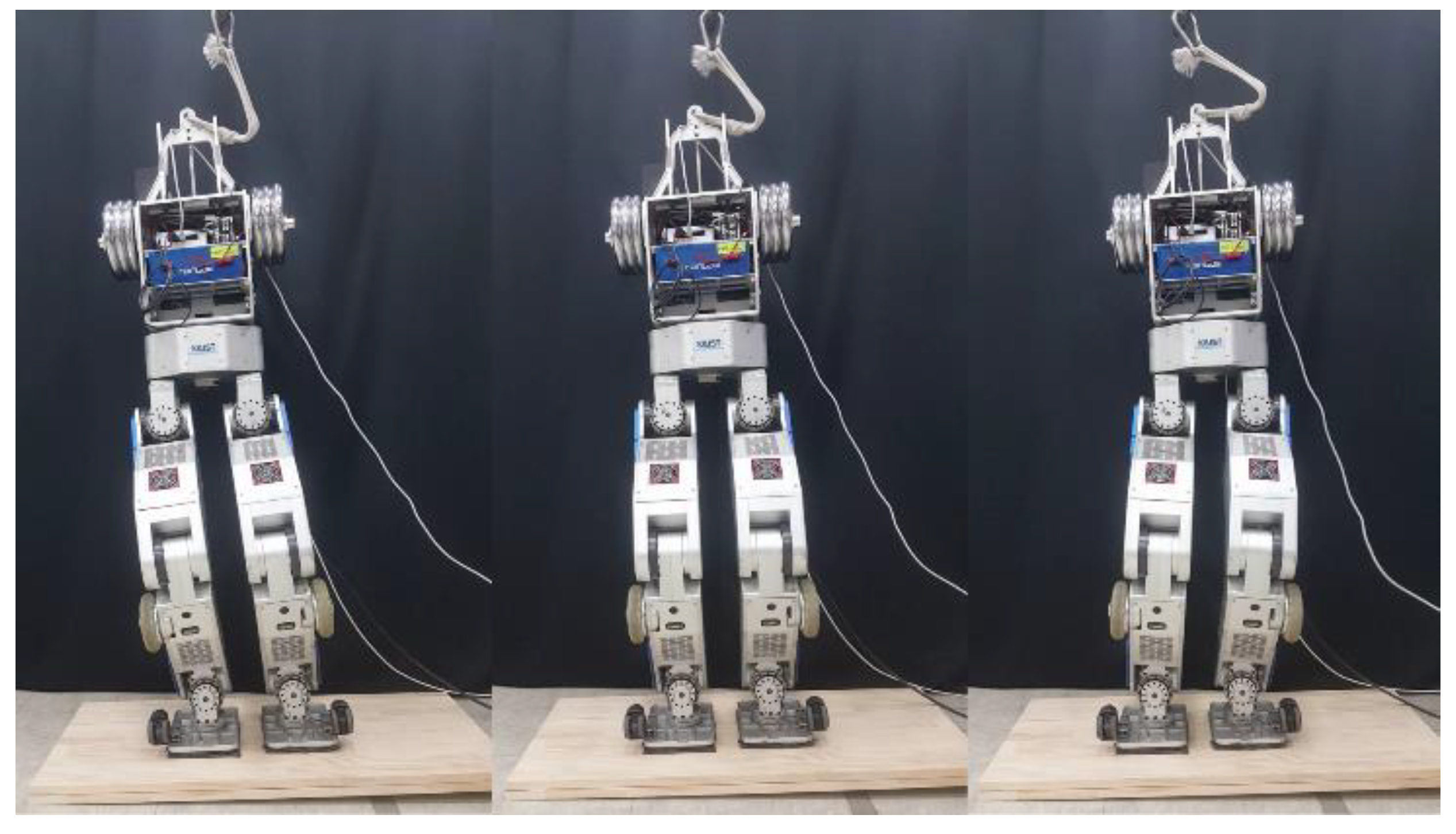
2.2. Robot System
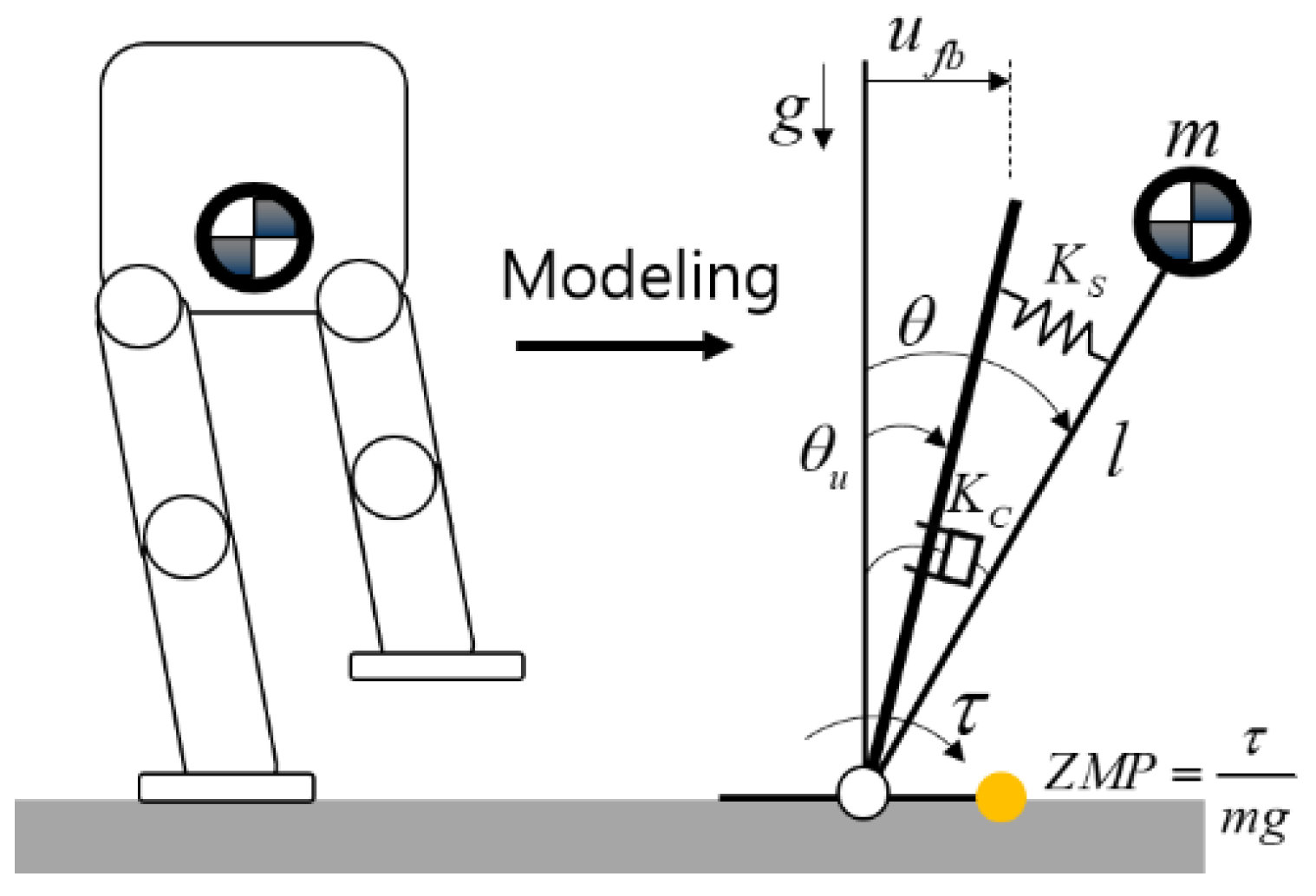
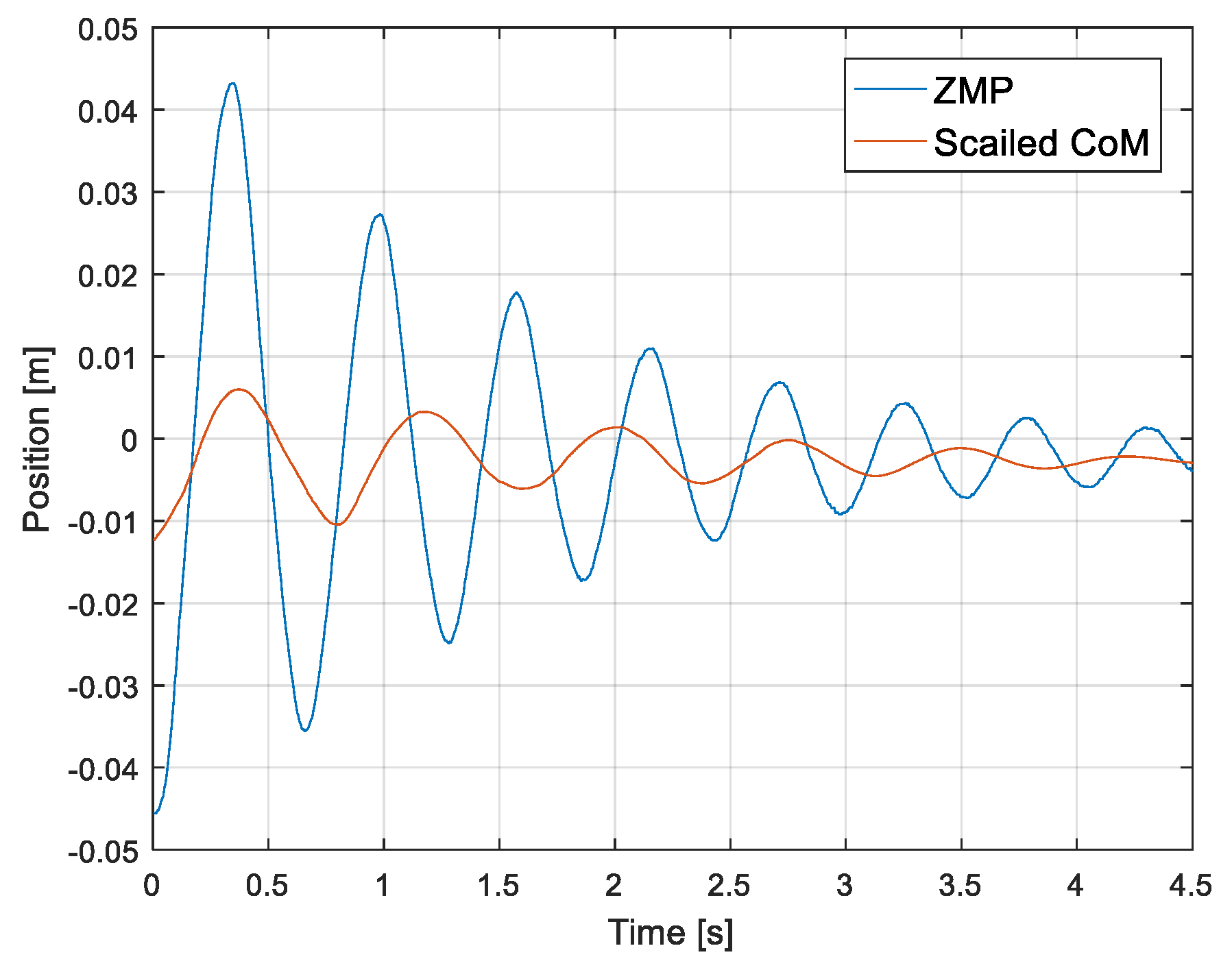
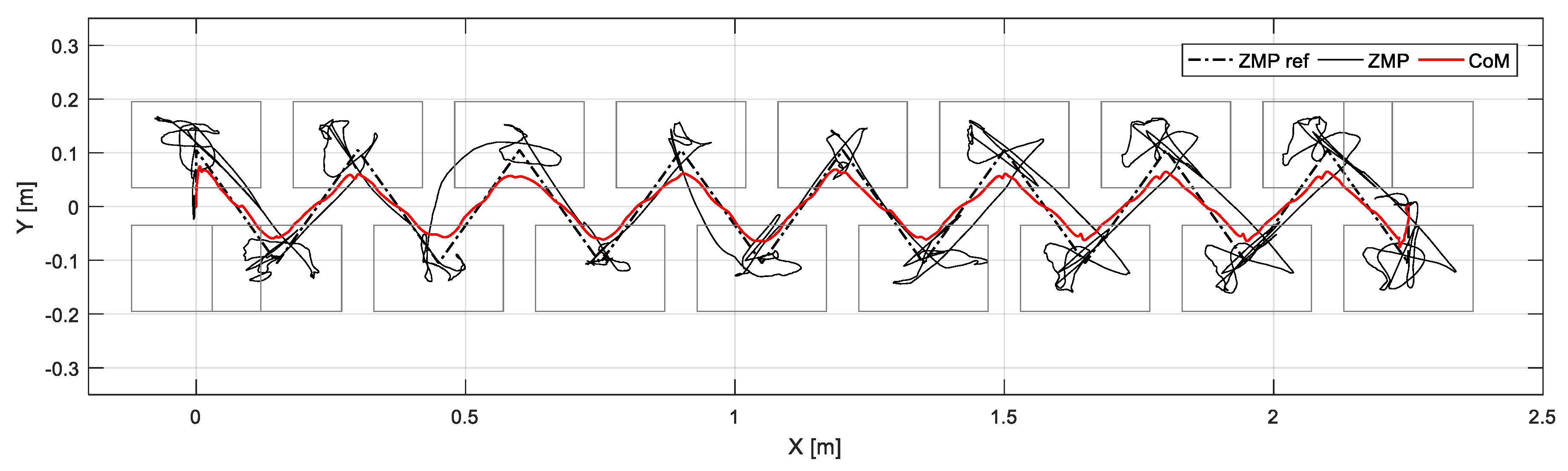
3. Stabilization of the CoM
3.1. Previous ZMP Control
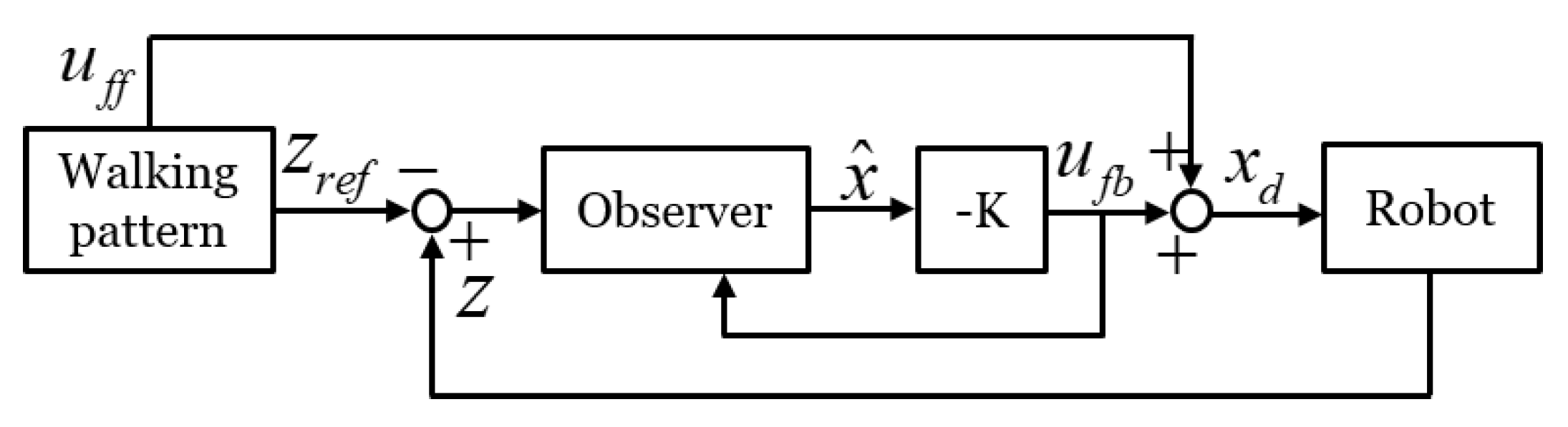
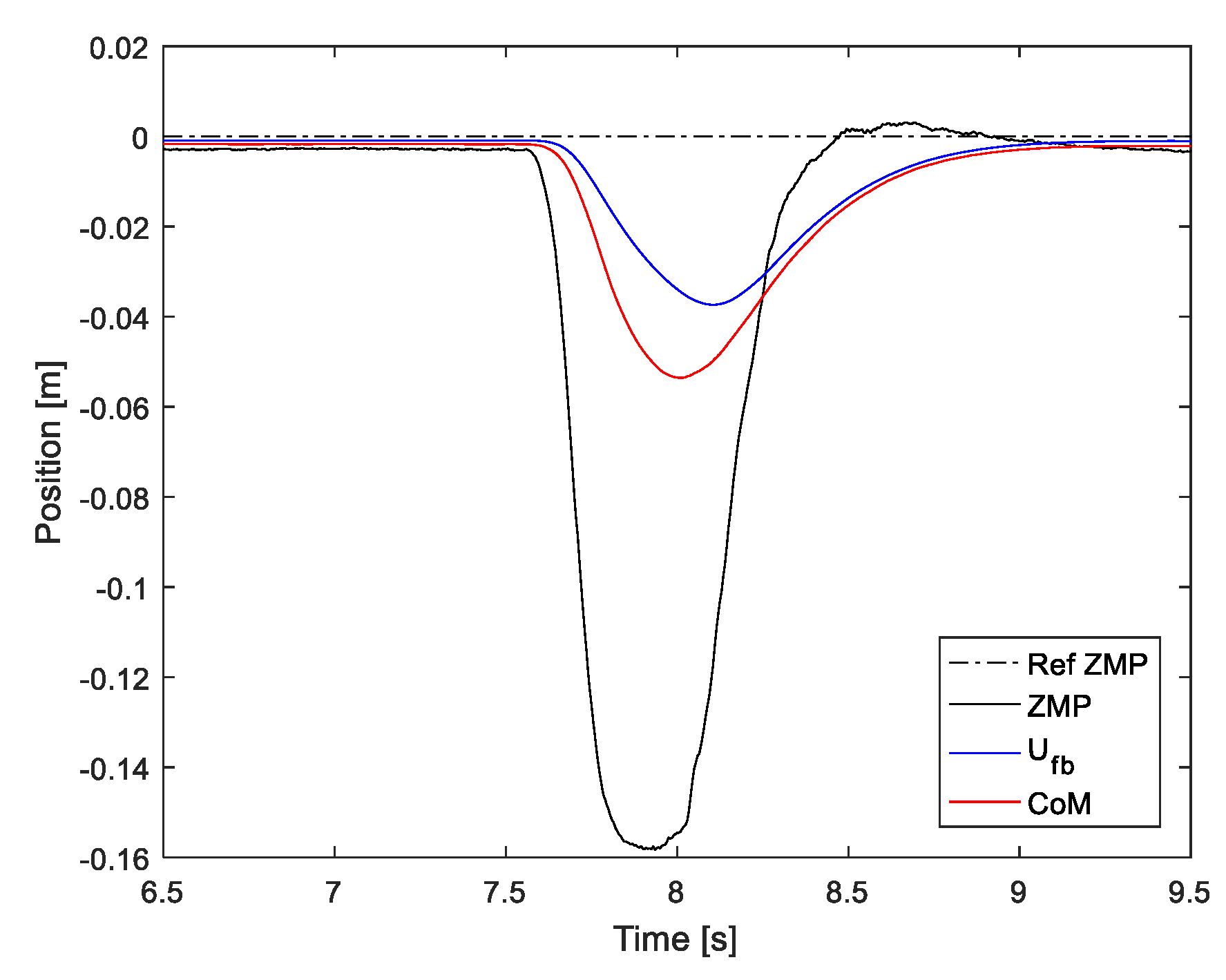
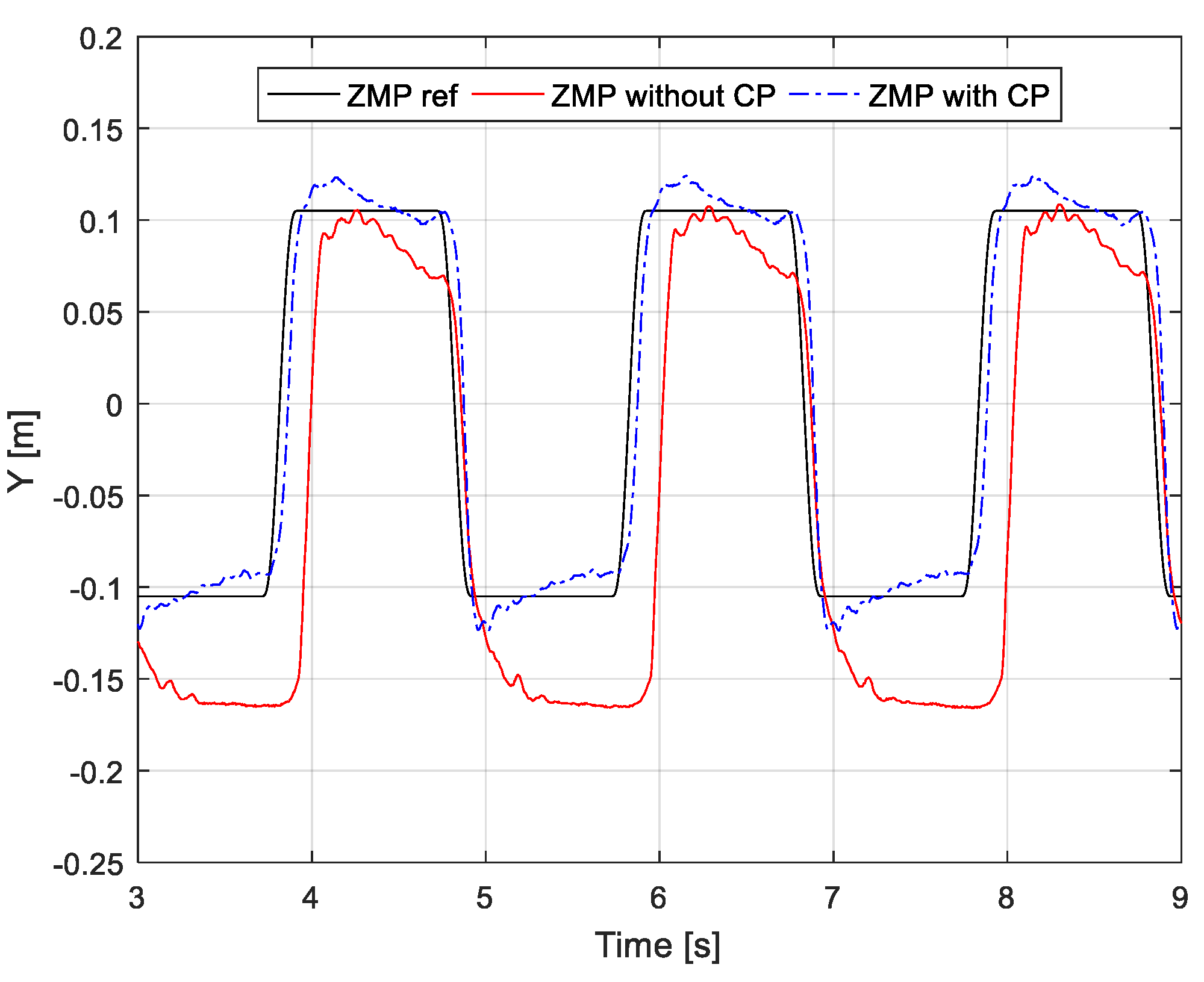
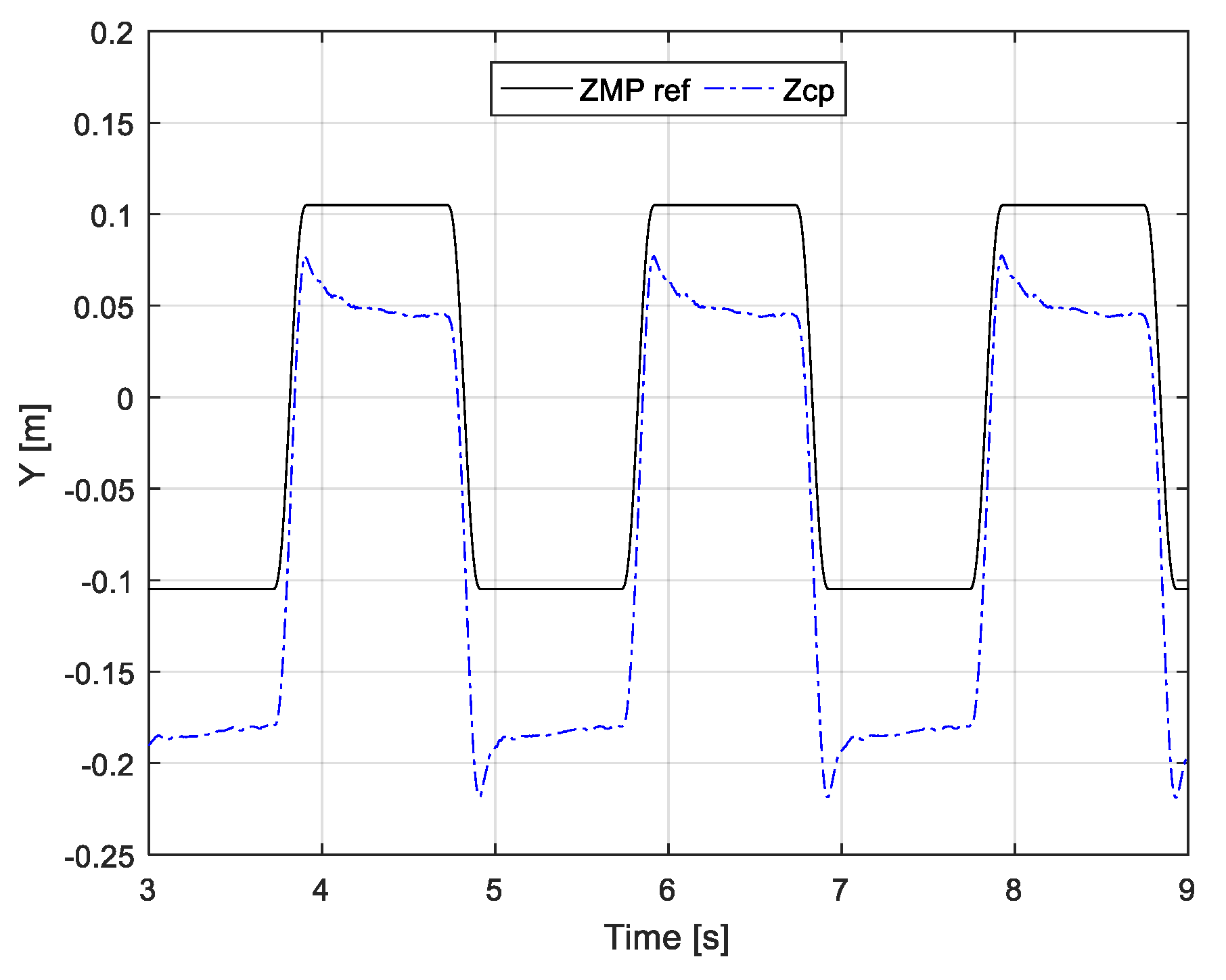
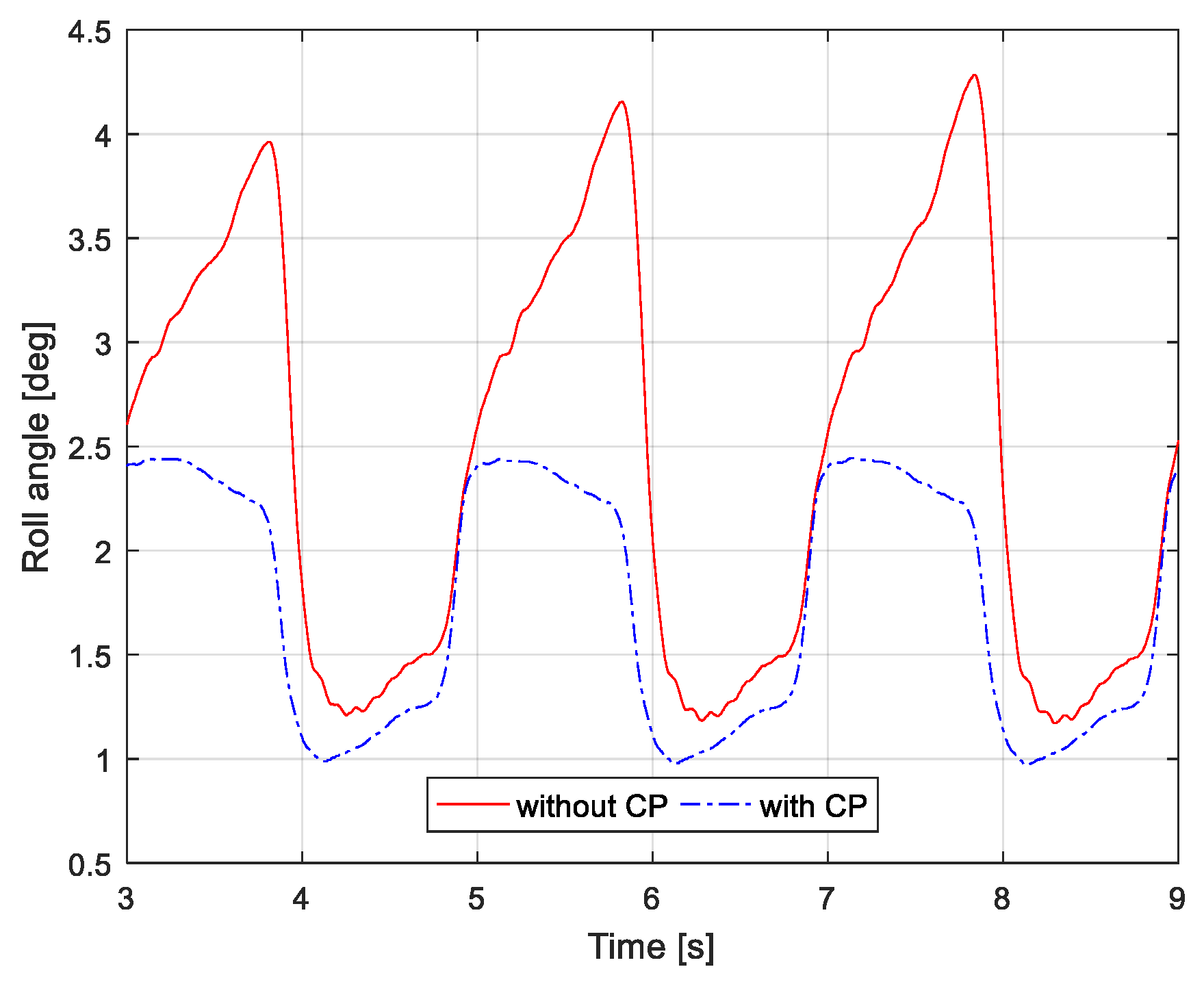
3.2. ZMP Controller with Capture-Point Feedback
4. Stabilization of Posture
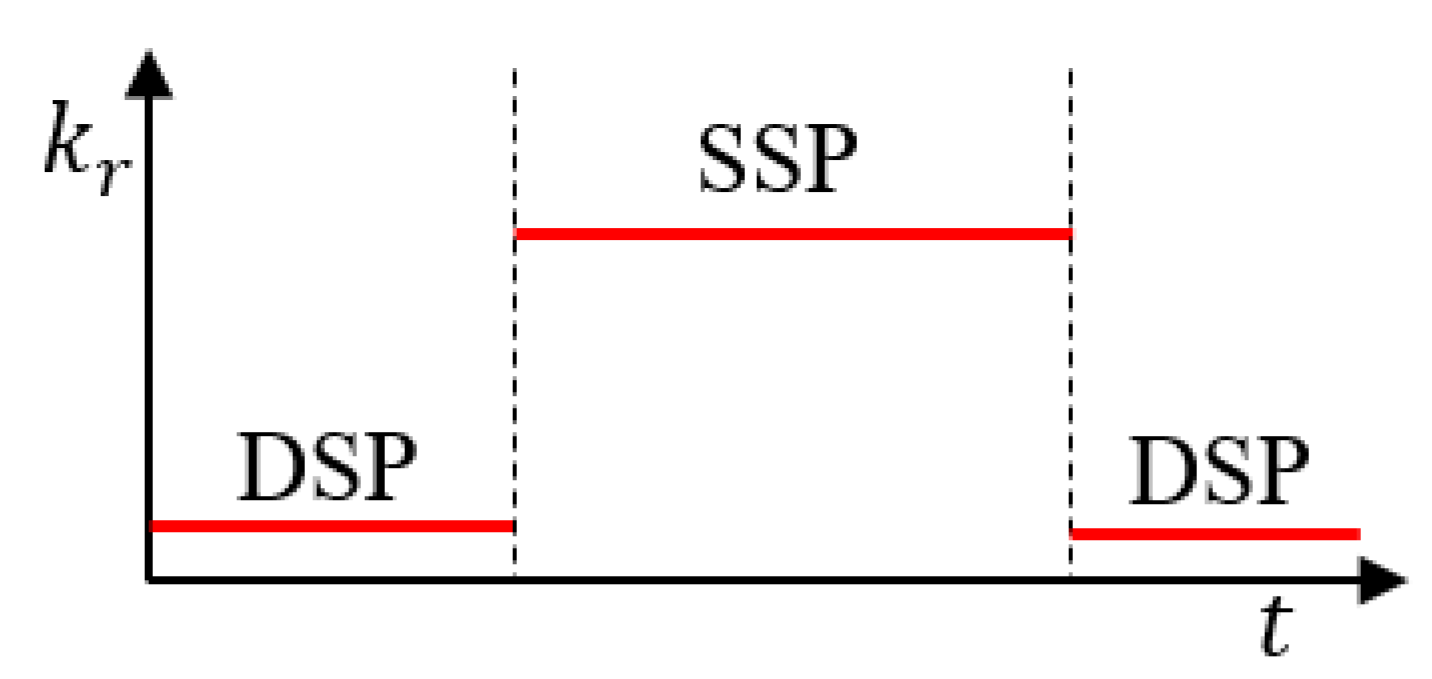
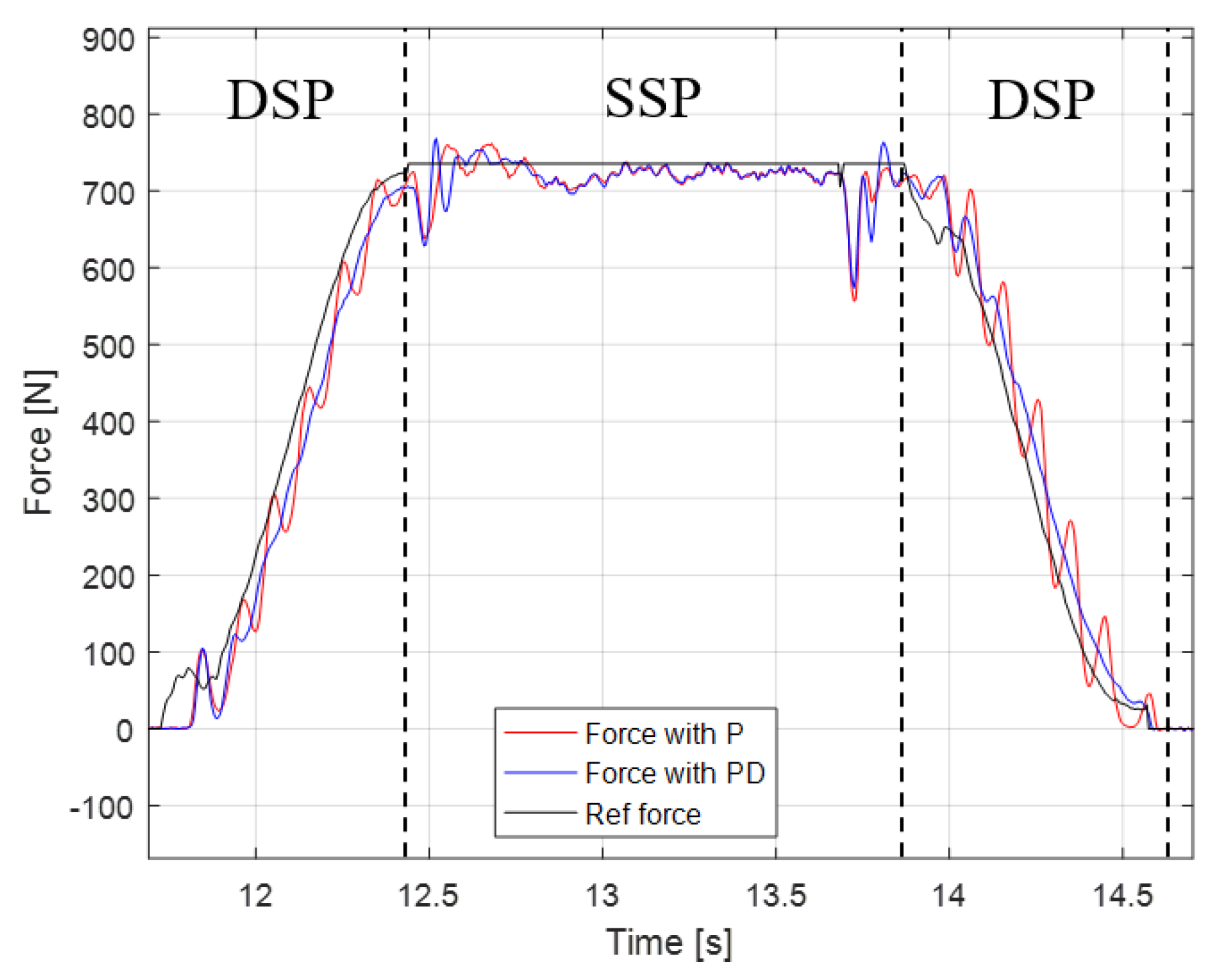
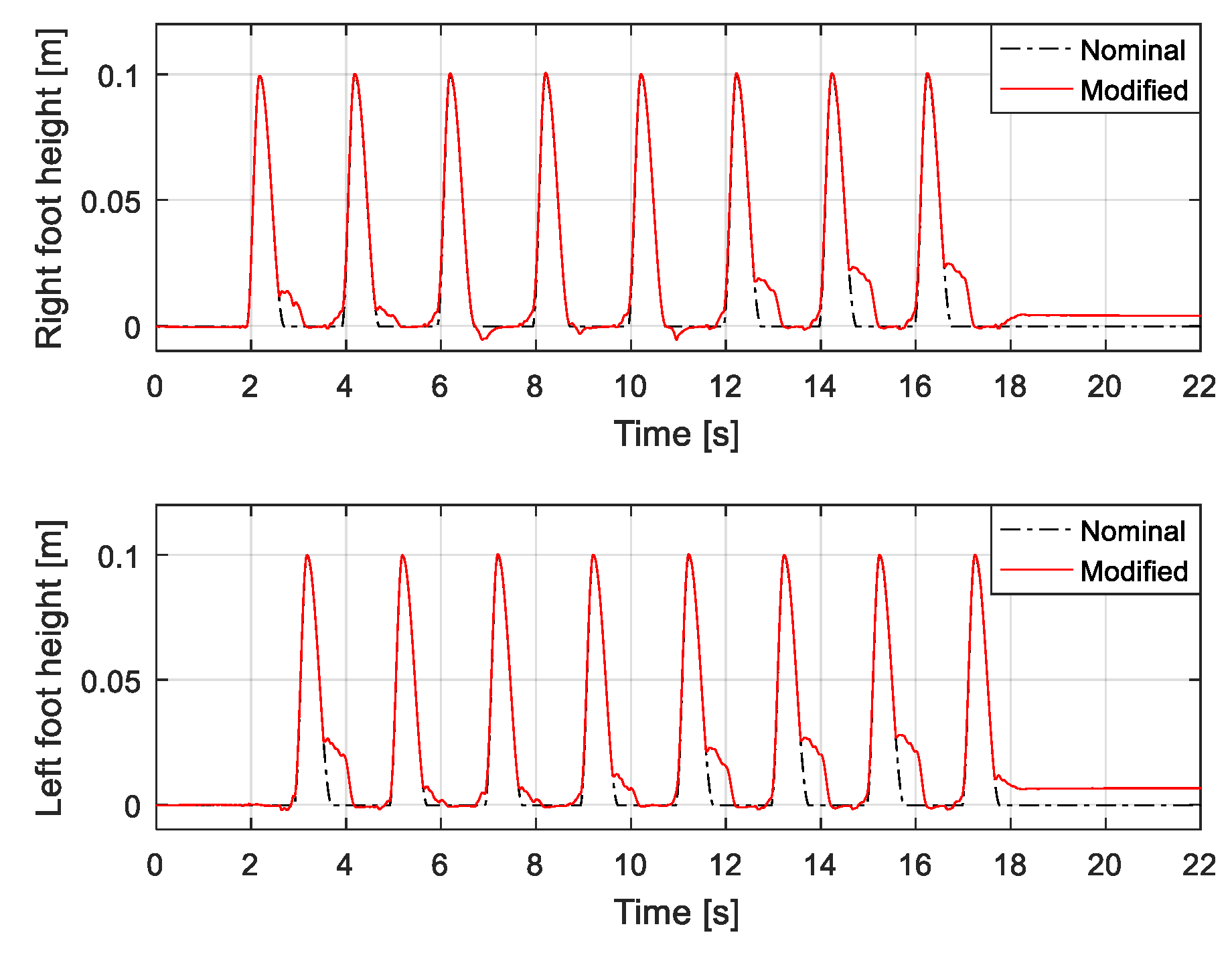
4.1. Leg Length Control for Adaptation to Terrain Elevation in the Double Support Phase
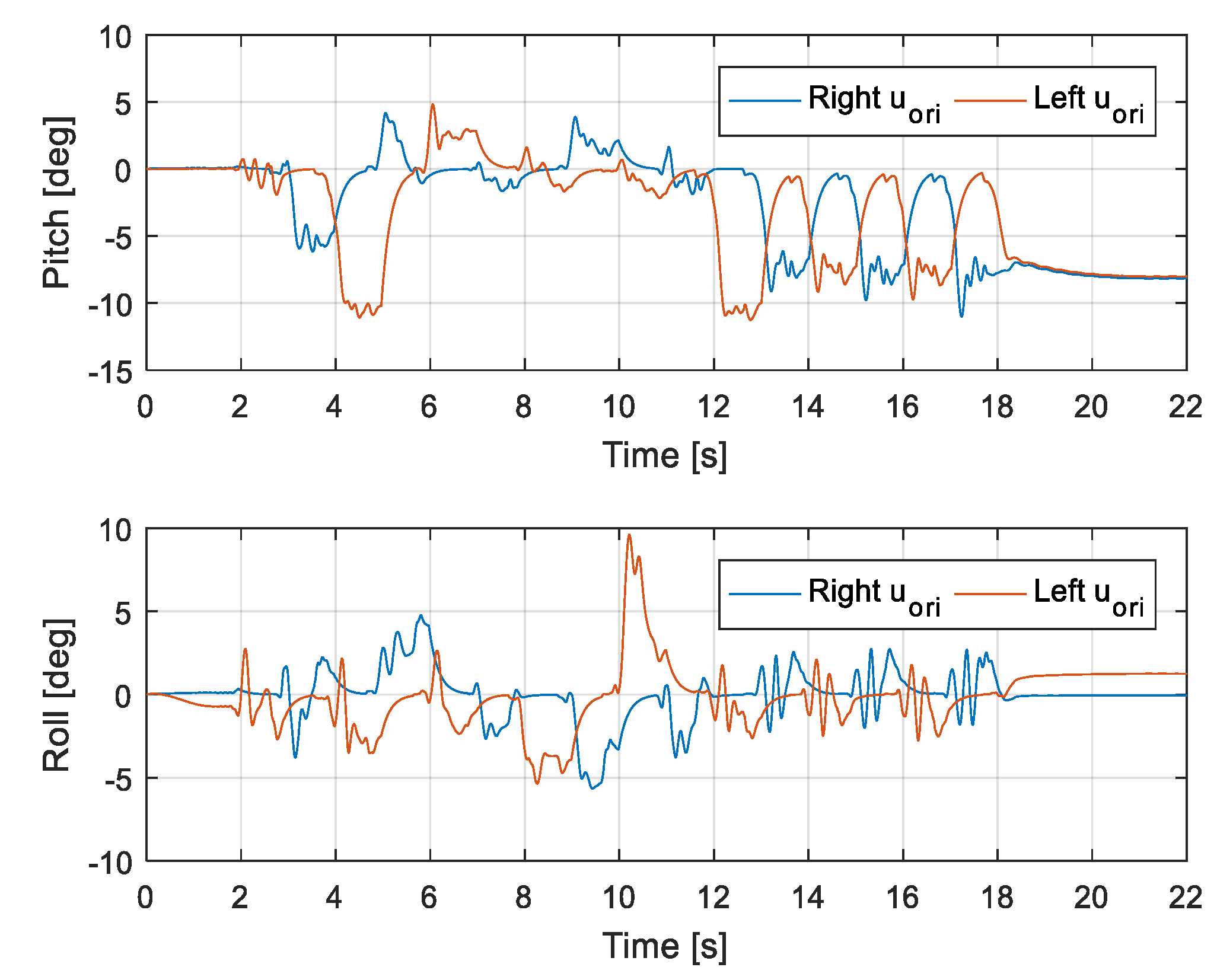
4.2. Foot Orientation Control for Adaptation to Ground Slope
5. Experiments and Results
5.1. Hardware Implementation for Real-Time Control
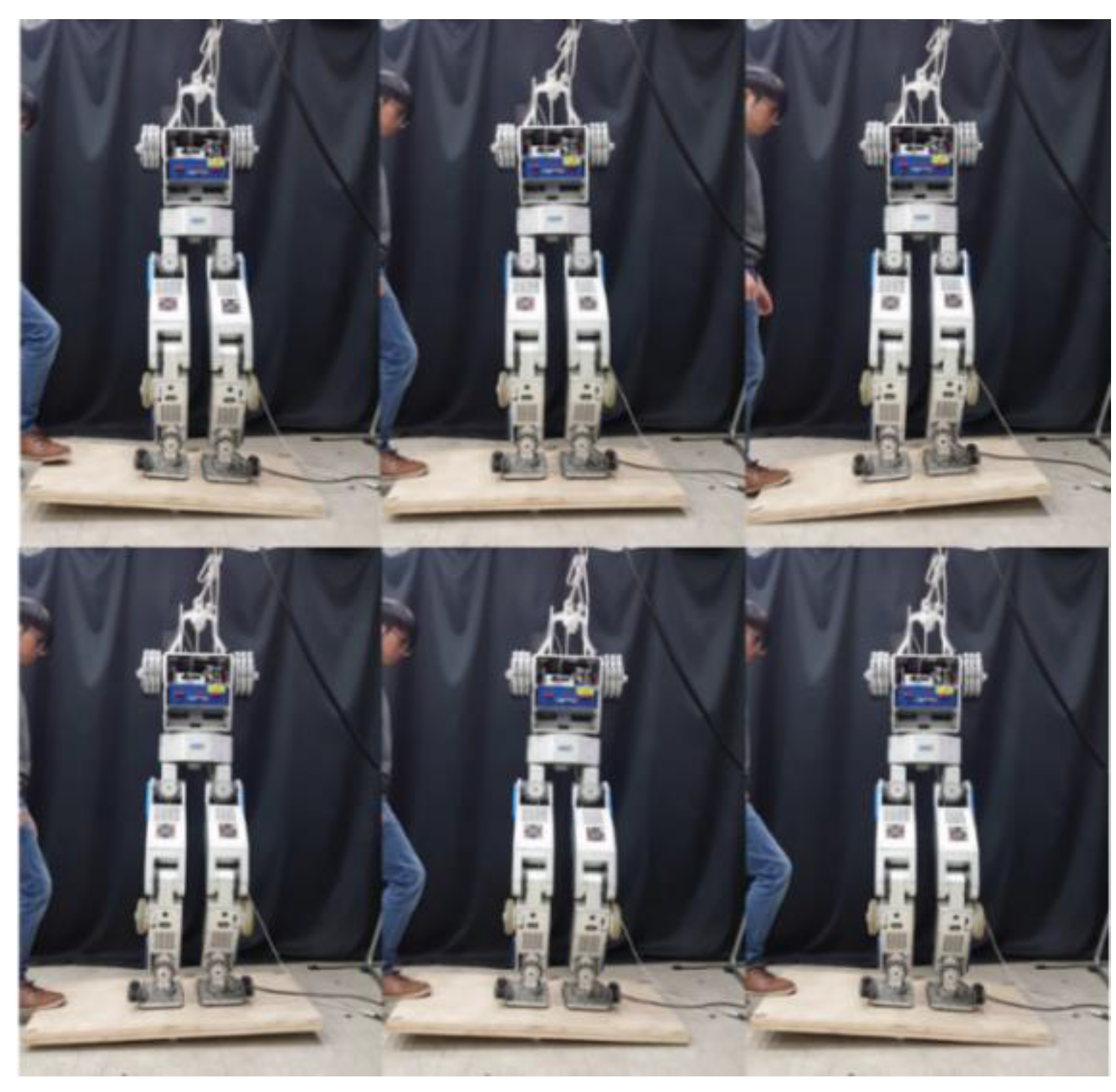
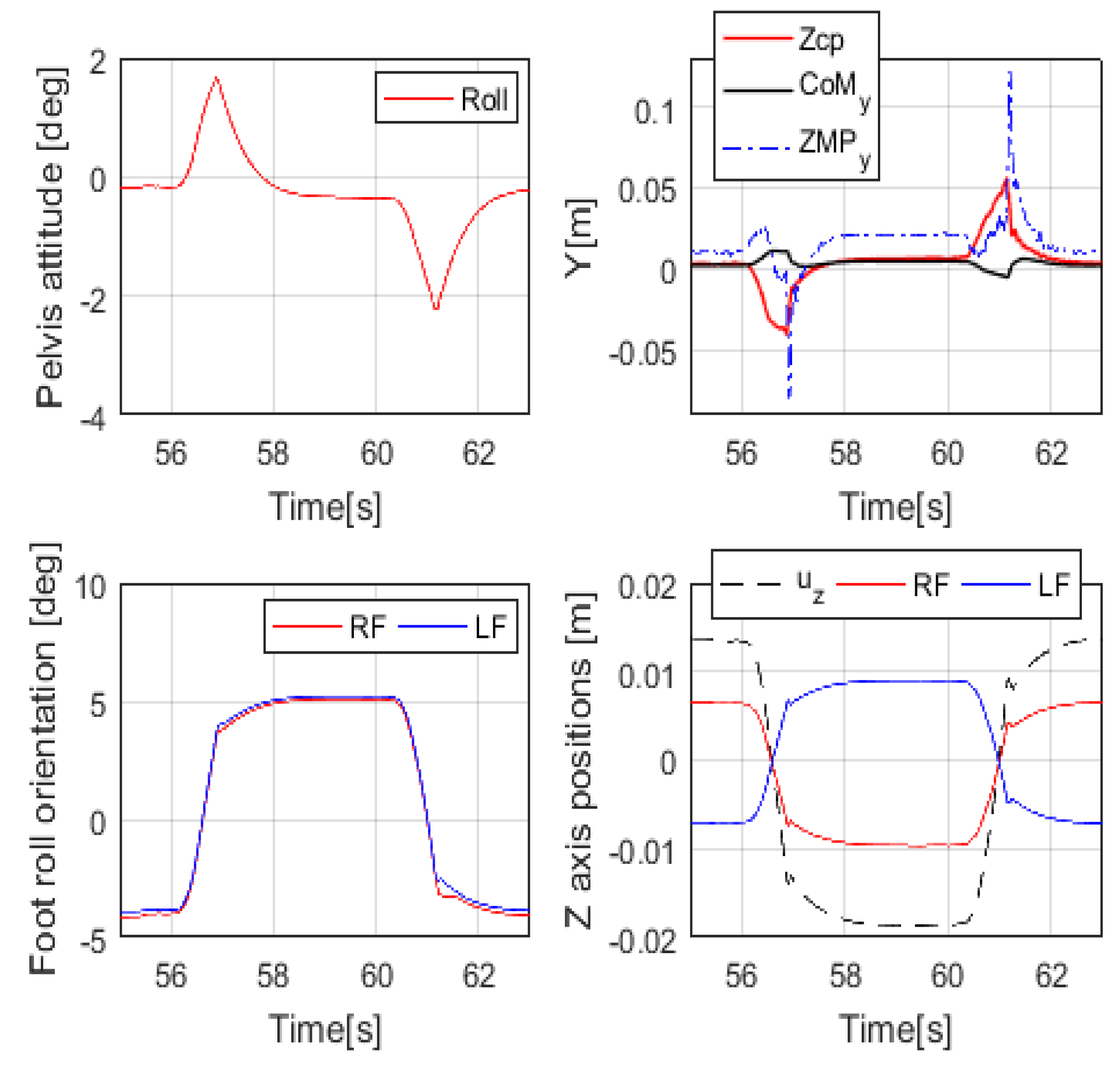
5.2. Balance Control under Varying Slope
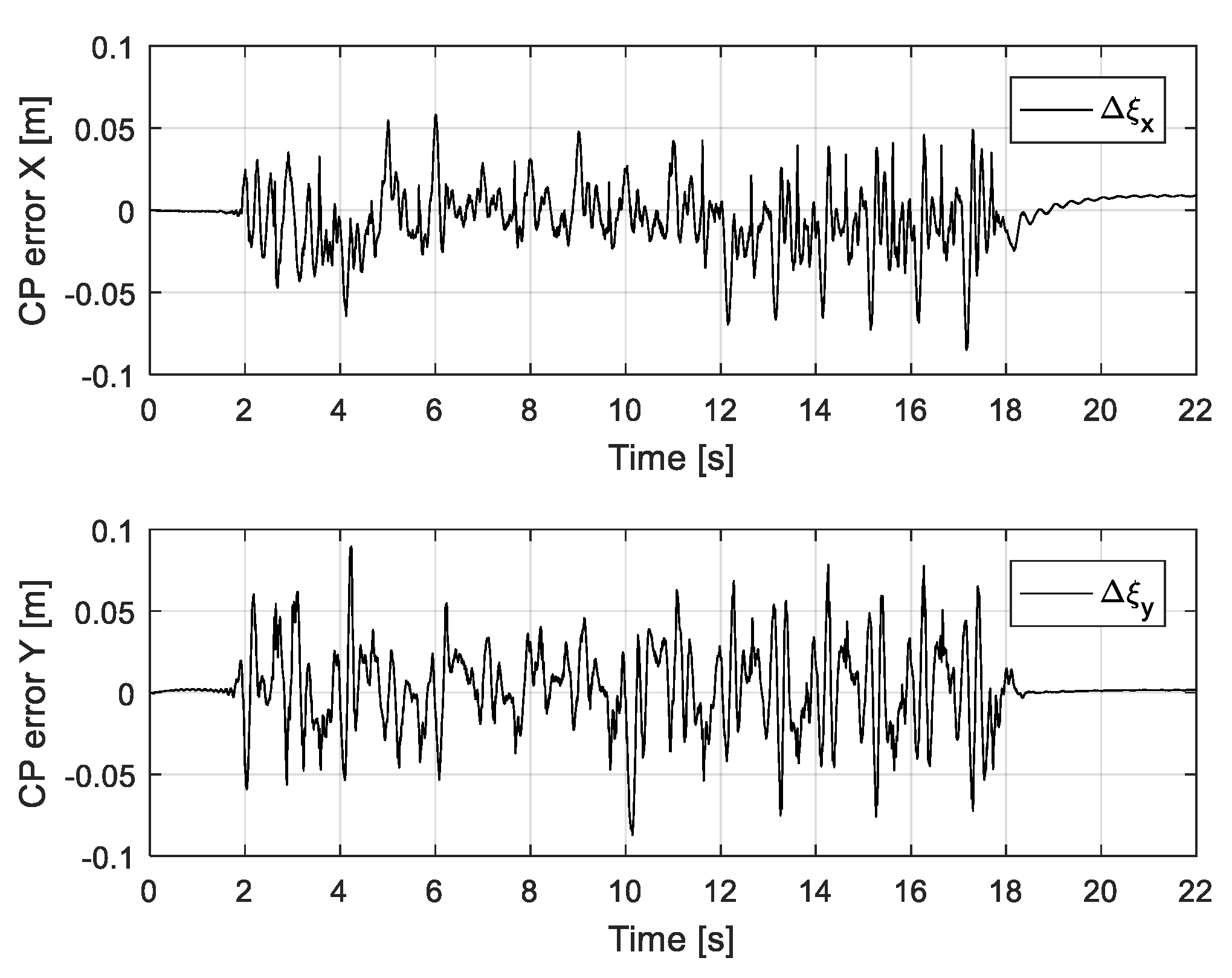
5.3. Terrain-Blind Walking on Uneven Terrain
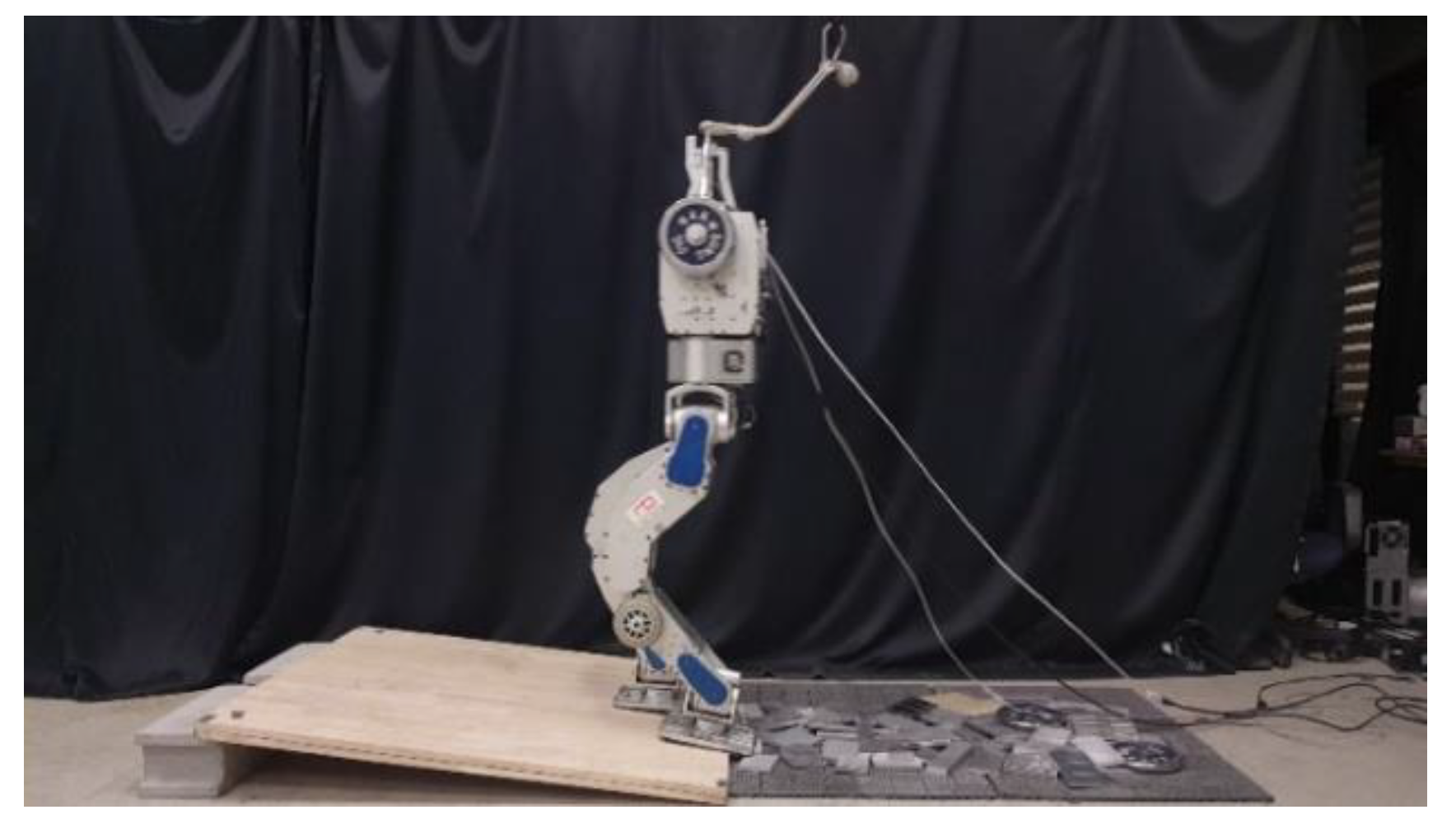
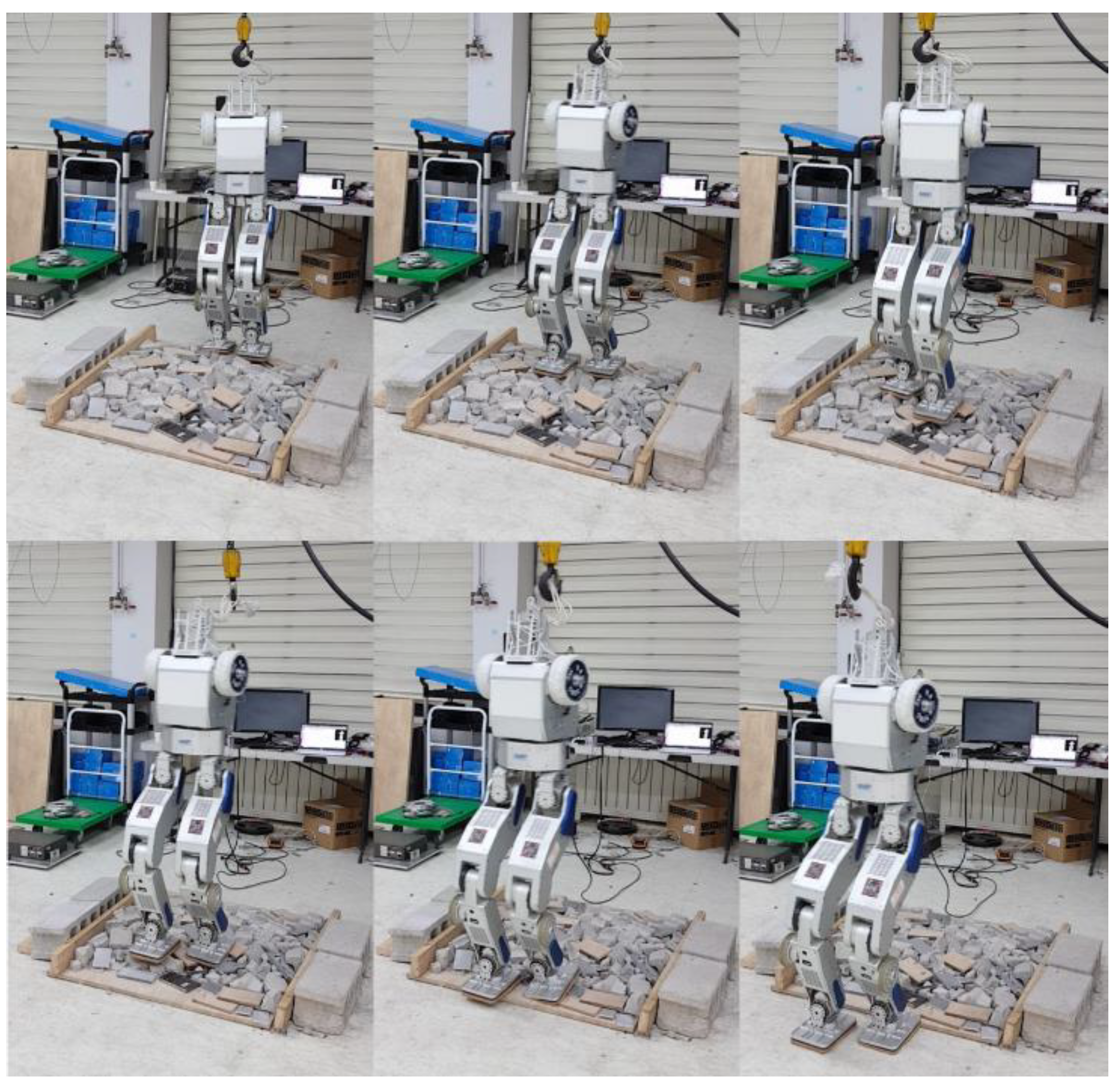
5.4. Terrain-Blind Walking on a Stony Area and a Lawn
6. Conclusions and Future Work
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Holt, M.; Campbell, R.J.; Nikitin, M.B. Fukushima Nuclear Disaster; Congressional Research Service: Washington, DC, USA, 2012. [Google Scholar]
- Pratt, G.; Manzo, J. The DARPA robotics challenge [competitions]. IEEE Robot. Autom. Mag. 2013, 20, 10–12. [Google Scholar] [CrossRef]
- Vukobratović, M.; Borovac, B. Zero-moment point—Thirty five years of its life. Int. J. Hum. Robot. 2004, 1, 157–173. [Google Scholar] [CrossRef]
- Nagasaka, K.I. Stabilization of dynamic walk on a humanoid using torso position compliance control. In Proceedings of the 17th Annual Conference on Robotics Society of Japan, Osaka, Japan, 1 January 1999. [Google Scholar]
- Choi, Y.; Kim, D.; Oh, Y.; You, B.J. Posture/walking control for humanoid robot based on kinematic resolution of com Jacobian with embedded motion. IEEE Trans. Robot. 2007, 23, 1285–1293. [Google Scholar] [CrossRef]
- Kim, J.Y.; Park, I.W.; Oh, J.H. Experimental realization of dynamic walking of the biped humanoid robot KHR-2 using zero moment point feedback and inertial measurement. Adv. Robot. 2006, 20, 707–736. [Google Scholar] [CrossRef] [Green Version]
- Martinez, S.; Garcia-Haro, J.; Victores, J.; Jardon, A.; Balaguer, C. Experimental robot model adjustments based on force–torque sensor information. Sensors 2018, 18, 836. [Google Scholar] [CrossRef] [PubMed]
- Ott, C.; Roa, M.A.; Hirzinger, G. Posture and balance control for biped robots based on contact force optimization. In Proceedings of the 2011 11th IEEE-RAS International Conference on Humanoid Robots, Bled, Slovenia, 26–28 October 2011; pp. 26–33. [Google Scholar]
- Feng, S.; Xinjilefu, X.; Atkeson, C.G.; Kim, J. Optimization based controller design and implementation for the Atlas robot in the DARPA Robotics Challenge finals. In Proceedings of the 2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), Seoul, Korea, 3–5 November 2015; pp. 1028–1035. [Google Scholar]
- Kuindersma, S.; Deits, R.; Fallon, M.; Valenzuela, A.; Dai, H.; Permenter, F.; Koolen, T.; Marion, P.; Tedrake, R. Optimization-based locomotion planning, estimation, and control design for the Atlas humanoid robot. Auton. Robot. 2016, 40, 429–455. [Google Scholar] [CrossRef]
- Koolen, T.; Bertrand, S.; Thomas, G.; De Boer, T.; Wu, T.; Smith, J.; Englsberger, J.; Pratt, J. Design of a momentum-based control framework and application to the humanoid robot Atlas. Int. J. Hum. Robot. 2016, 13, 1650007. [Google Scholar] [CrossRef]
- Englsberger, J.; Werner, A.; Ott, C.; Henze, B.; Roa, M.A.; Garofalo, G.; Burger, R.; Beyer, A.; Eiberger, O.; Schmid, K.; et al. Overview of the torque-controlled humanoid robot TORO. In Proceedings of the 2014 IEEE-RAS International Conference on Humanoid Robots, Madrid, Spain, 18–20 November 2014; pp. 916–923. [Google Scholar]
- Boston Dynamics. Atlas Humanoid Robot. Available online: https://www.bostondynamics.com/atlas (accessed on 20 November 2018).
- Radford, N.A.; Strawser, P.; Hambuchen, K.; Mehling, J.S.; Verdeyen, W.K.; Donnan, A.S.; Holley, J.; Sanchez, J.; Nguyen, V.; Bridgwater, L.; et al. Valkyrie: Nasa’s first bipedal humanoid robot. J. Field Robot. 2015, 32, 397–419. [Google Scholar] [CrossRef]
- Jung, T.; Lim, J.; Bae, H.; Lee, K.K.; Joe, H.M.; Oh, J.H. Development of the Humanoid Disaster Response Platform DRC-HUBO+. IEEE Trans. Robot. 2018, 34, 1–17. [Google Scholar] [CrossRef]
- Kaneko, K.; Kaminaga, H.; Sakaguchi, T.; Kajita, S.; Morisawa, M.; Kumagai, I.; Kanehiro, F. Humanoid Robot HRP-5P: An electrically actuated humanoid robot with high-power and wide-range joints. IEEE Robot. Autom. Lett. 2019, 4, 1431–1438. [Google Scholar] [CrossRef]
- Kojima, K.; Karasawa, T.; Kozuki, T.; Kuroiwa, E.; Yukizaki, S.; Iwaishi, S.; Ishikawa, T.; Koyama, R.; Noda, S.; Sugai, F.; et al. Development of life-sized high-power humanoid robot jaxon for real-world use. In Proceedings of the 2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), Seoul, Korea, 3–5 November 2015. [Google Scholar]
- Lim, H.O.; Setiawan, S.A.; Takanishi, A. Position-based impedance control of a biped humanoid robot. Adv. Robot. 2004, 18, 415–435. [Google Scholar] [CrossRef]
- Kim, J.Y.; Park, I.W.; Oh, J.H. Walking control algorithm of biped humanoid robot on uneven and inclined floor. J. Intell. Robot. Syst. 2007, 48, 457–484. [Google Scholar] [CrossRef]
- Kajita, S.; Morisawa, M.; Miura, K.; Nakaoka, S.; Harada, K.; Kaneko, K.; Kanehiro, F.; Yokoi, K. Biped walking stabilization based on linear inverted pendulum tracking. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 4489–4496. [Google Scholar]
- Englsberger, J.; Ott, C.; Roa, M.A.; Albu-Schäffer, A.; Hirzinger, G. Bipedal walking control based on capture point dynamics. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 4420–4427. [Google Scholar]
- Englsberger, J. Combining Reduced Dynamics Models and Whole-Body Control for Agile Humanoid Locomotion. Ph.D. Thesis, Technische Universität München, Munich, Germany, 2016. [Google Scholar]
- Hong, Y.D. Capture Point-Based Controller Using Real-Time Zero Moment Point Manipulation for Stable Bipedal Walking in Human Environment. Sensors 2019, 19, 3407. [Google Scholar] [CrossRef] [PubMed]
- Robust Balance Controller for Stable Walking on Uneven Terrain. Available online: https://youtu.be/4xk-UP4Qcfo (accessed on 23 April 2019).
- Kajita, S.; Hirukawa, H.; Harada, K.; Yokoi, K. Introduction to Humanoid Robotics; Springer: Berlin/Heidelberg, Germany, 2014; Volume 101, p. 2014. [Google Scholar]
- Kajita, S.; Kanehiro, F.; Kaneko, K.; Fujiwara, K.; Harada, K.; Yokoi, K.; Hirukawa, H. Biped walking pattern generation by using preview control of zero-moment point. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation (Cat. No. 03CH37422), Taipei, Taiwan, 14–19 September 2003. [Google Scholar]
- Kim, J.Y.; Jun, B.H.; Park, I.W. Six-legged walking of ‘Little Crabster’ on uneven terrain. Int. J. Precis. Eng. Manuf. 2017, 18, 509–518. [Google Scholar] [CrossRef]
- Feng, S.; Xinjilefu, X.; Atkeson, C.G.; Kim, J. Robust dynamic walking using online foot step optimization. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 5373–5378. [Google Scholar]
- Urbann, O.; Hofmann, M. A reactive stepping algorithm based on preview controller with observer for biped robots. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 5324–5331. [Google Scholar]
- Joe, H.M.; Oh, J.H. Balance recovery through model predictive control based on capture point dynamics for biped walking robot. Robot. Auton. Syst. 2018, 105, 1–10. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Description | |
|---|---|---|
| Height | 170 [cm] | |
| Weight | 80 [kg] | |
| Degree of freedom (DOF) | Total | 32 DOFs |
| Arm | 2 Arms × 7 DOFs | |
| Hand | 2 Hands × 1 DOF | |
| Waist | 1 DOF | |
| Leg | 2 Legs × 6 DOFs | |
| Wheel | 2 Wheels × 1 DOF | |
| Head | 1 DOF | |
| Actuators | 200 [W], 100 [W] BLDC/DC Motor | |
| Sensors | 3-axis fiber-optics gyro, 3-axis inertia measurement unit (IMU) | |
| Power | DC voltage: 48 [V], Capacity: 11.4 [Ah] | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Joe, H.-M.; Oh, J.-H. A Robust Balance-Control Framework for the Terrain-Blind Bipedal Walking of a Humanoid Robot on Unknown and Uneven Terrain. Sensors 2019, 19, 4194. https://doi.org/10.3390/s19194194
Joe H-M, Oh J-H. A Robust Balance-Control Framework for the Terrain-Blind Bipedal Walking of a Humanoid Robot on Unknown and Uneven Terrain. Sensors. 2019; 19(19):4194. https://doi.org/10.3390/s19194194
Chicago/Turabian StyleJoe, Hyun-Min, and Jun-Ho Oh. 2019. "A Robust Balance-Control Framework for the Terrain-Blind Bipedal Walking of a Humanoid Robot on Unknown and Uneven Terrain" Sensors 19, no. 19: 4194. https://doi.org/10.3390/s19194194