1. Introduction
Many network functions such as network monitoring and management [
1,
2], diagnosis, optimization, and network operation, rely on the accurate knowledge of network topologies. For networks that enable the response of Internet Control Message Protocol (ICMP), one can make use of the “Raspberry Pi” [
3] as the network monitoring nodes to build an overlay network [
4], whose nodes run network tools such as
Traceroute to collect information of Internet Protocol (IP) addresses from the Time-To-Live (TTL) timeout responses and piece together the underlying network topology [
5]. However, the practical deployments of these network tools are sometimes quite limited, since more and more network operators are likely to remove the support of ICMP from their networks due to security concerns. As a result, network topology tomography, which employs end-to-end measurements to identify network topology [
6], emerges as an appealing supplementary method. Regarding that network tomography generally assumes no cooperation from network intermediate elements, it thus can be well deployed to networks without ICMP responses.
By conducting end-to-end measurements on all pairwise paths, the correlation of performances (e.g., delay or loss rates [
7,
8,
9,
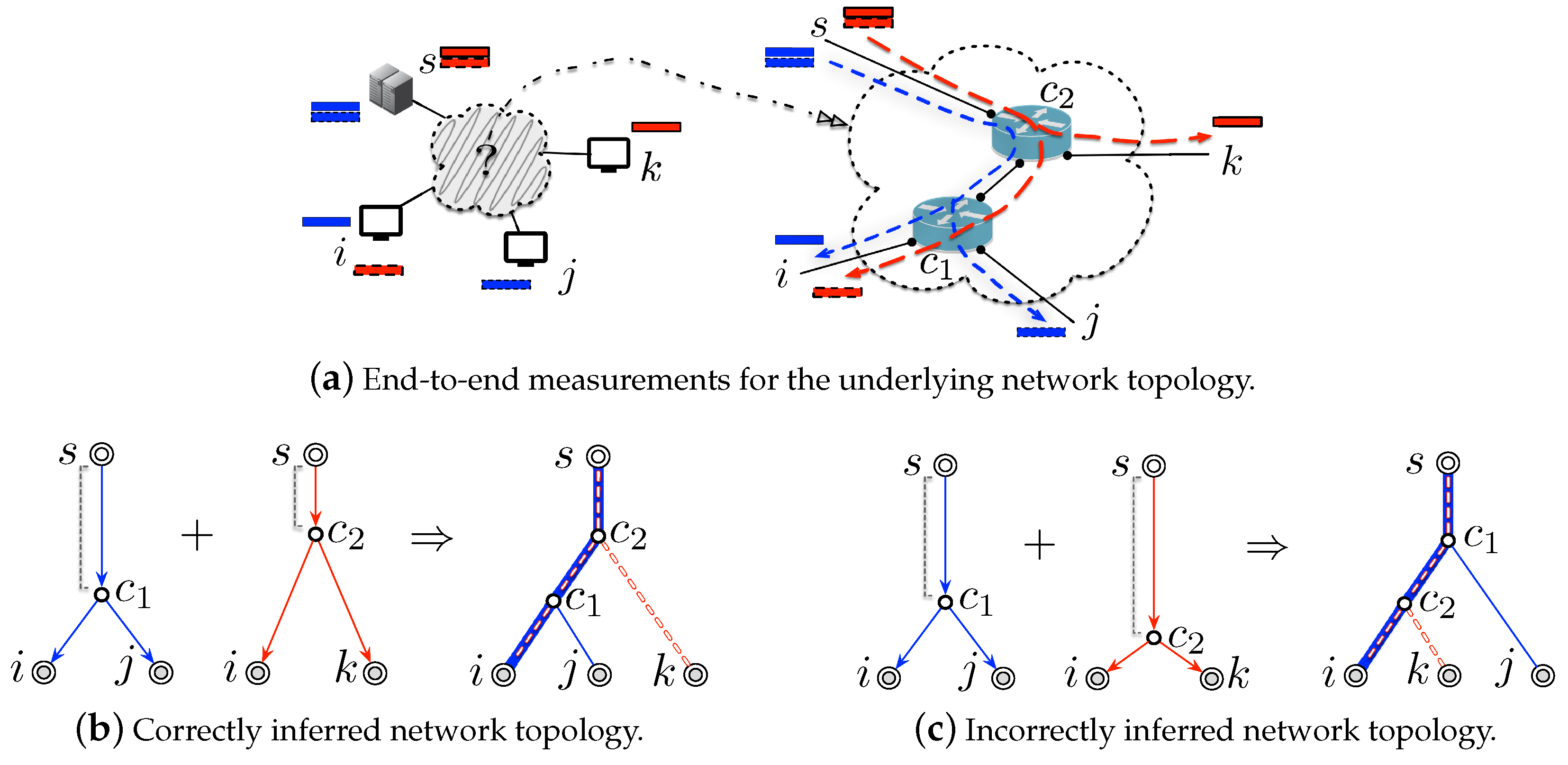
10]) between any two paths are measured and related to the length of their shared paths. Since such length indicates where two paths will split, how to accurately obtain them becomes the primary task in network topology tomography. For example, in
Figure 1a, we send probes each composed of two “back-to-back” packets (colored in blue) from the source node
s to the destination node
i and
j, for a pairwise delay measurement. Noticed that two “back-to-back” packets are closely spaced in the shared path connecting from
s to
, their transmission delays then are supposed to be identical before they split on the branching node
, introducing corrections to the (end-to-end) path delays. To measure their delay correlation, one just needs to compute the delay covariance [
11]. It is clear that longer the shared path is, larger the delay covariance will be. Consequently, one can efficiently determine the position of the branching nodes for network topology inference by comparing these delay covariances [
12,
13,
14]. For example, when the computed delay covariance between the two paths destined at node
i and
j is larger than the one for those two paths destined at node
i and
k, the branching node
then will be correctly placed under
, making an accurate inference of the network topology depicted in
Figure 1b. For a more comprehensive review of network topology tomography, it is suggested to refer to the survey work of Zhang et al. [
5].
However, as investigated in [
15], such correlation measurements between two end-to-end paths are found to vary with the cross-traffic, which is also referred to background network traffic (or just background traffic) and is a common term in network tomography. It is used to denote the non-probing traffic that is passing in parallel to the probing traffic (i.e., injected by the end-to-end measurements [
16]). For example, the delay covariances will be “zoom out” (i.e., be greater) when the cross-traffic gets a heavier load intensity. It might be reasonable for one to assume that the cross-traffic of a small-scaled network stays stable during the entire measurement period, in terms of that the number of all pairwise paths is small and the entire end-to-end measurements will not last long. However, if the network gets a large size, such measurement periods will take a long time, making it impractical for the cross-traffic to keep its load intensity unchanged [
17]. Moreover, some differences inherently exist between the cross-traffic of the local networks, due to the network heterogeneity from their various network elements, configurations, and applications, etc. Once this is the case, inconsistent estimation of the shared path lengths will be generated, leading to inaccurate inference of the underlying topology. For instance, in
Figure 1a, when the cross-traffic on the shared path between the pair of paths destined for node
i and
k becomes more intensive, the computed delay covariance will be comparably much larger. This will make
wrongly placed under
, leading the network topology to be incorrectly inferred as
Figure 1c. As you can see, due to the time-varying and heterogeneous cross-traffic [
16], the practicality of current network topology tomography is significantly limited by its pairwise end-to-end measurements.
To this end, in this letter, we first explore the theoretical side of network topology tomography with triple-wise end-to-end measurements, which at a time probe three paths instead of a pair of paths. The key motivation behinds triple-wise end-to-end measurements is that links in the final inferred topology actually does not have any specific metric. They only represent the logical connections between nodes. Therefore, rather than using conventional pairwise end-to-end measurements to get the absolute length of the shared paths, triple-wise end-to-end measurements obtain their relative length. We theoretically show that once the sub-topology of any three paths can be accurately identified from triple-wise end-to-end measurements, the underlying network topology is identifiable. Our theoretical results indicate that one can deploy hybrid triple-wise measurement schemes (e.g., end-to-end probing alongside traceroute tracing) for different local parts of networks, as long as they can correctly obtain these sub-topologies.
3. Topology Identifiability with Three-Path-Based Sub-Topologies
In this section, we will prove the topology identifiability with mathematical induction. First, we theoretically demonstrate that the triple-wise end-to-end measurements will always generate the consistent sub-topologies for any three paths with Lemma 1 and Lemma 2, if these triple-wise end-to-end measurements are free of errors. Noticed that network topology recovery can be proceeded by recursively adding an end-to-end path to the current semi-recovered topology. Thus, secondly, we show that in Lemma 3 the topology inferred by adding a path to the current semi-recovered topology is also correct if the current semi-recovered topology is accurately inferred. Finally, we prove the topology identifiability in Theorem 1.
Lemma 1. Given , the node set (resp. the link set ) and (resp. ) are bijective.
Proof of Lemma 1. We first prove that Lemma 1 holds true for the node set and . To this end, we need to prove that the map from to is both injective and surjective. (a) Supposed that such that . This means that at least two paths are going to rejoin after they split, indicating that either or should be a joining node. However, a tree topology gets no joining node in . Thus, the above suppose does not hold, and we will have for any , meaning that the map from to is injective. (b) As we always can find a node for , the map from to then is also surjective. According to (a) and (b), we get a bijection between and . Hence, Lemma 1 holds true for the node set and .
We now prove Lemma 1 for and . Recalling that a link can be represented by a tuple composed of its starting node and ending node, the ending nodes of any two links in the tree topology then are different as neither of them could be a joining node. Consequently, , ∃ a node such that only the ending node of ℓ is v, indicating that and in is one-to-one correspondence (i.e., bijective). Since the composition of two bijections is again a bijection, we conclude that the map from to is bijective regarding the bijection between and proved in the beginning. Hence, Lemma 1 holds true. □
Lemma 2. Given , , , and , the three-path-based sub-topology is unique.
Proof of Lemma 2. In the tree topology
, it is known that there is a unique branching node between every two end-to-end paths. Supposed
is not unique. This means
at least corresponds to two different three-path-based sub-topologies as illustrated in
Figure 2. (
I) If we have
and
, it is obvious that
and
get two different branching nodes. Such conclusion also holds when we replace
with
or
; (
II) If
and
(resp.
),
and
(resp.
) also get two different branching nodes; (
III) If
and
,
and
get two different branching nodes. Obviously, (
I), (
II), and (
III) together enumerate all the six different cases for
that gets two different values. However, all these cases are violated the tree structure of
, indicating that
can only get a unique value. Hence, Lemma 2 holds true. □
Lemma 1 reveals that the end-to-end measurements upon paths are closely related to the network nodes and links while Lemma 2 indicates that the measurement results of the sub-topology of any three end-to-end path will stay consistent if such measurements are free of errors. In what follows, we will show that inferring the network topology by adding paths recursively is able to identify the true network topology.
Lemma 3. , , and , if given , then , we have .
Proof of Lemma 3. As illustrated in
Figure 2,
is inserted into
either at a node or on a link. Without loss of generality, we denote the insertion node as
x (resp. the insertion link as
y).
(
I) Supposed that
is inserted into
at the node
x. We denote the true insertion node for
by
v. Supposed
, i.e.,
. According to Lemma 1,
indicates that we have
in
. Then we must have
. (
I.1) If
, then we select
and
. After inserting
into
at node
x, we obtain a three-path-based sub-topology
. Because of
, it is easy to find that
in
is different from the given
in the true
, where
is inserted at node
v. For example in
Figure 2c,d,
could be 2 while
could be 3; (
I.2) If
, then we must have either
, or vice versa. Without loss of generality, let
, we are able to find
and
. As depicted in
Figure 2, we have
in
while the given one in the true
is
. Therefore, we can always find some
in
inconsistent with the given
in the true
for case (
I). However, this violates Lemma 2, which generally states that the sub-topology composed of
,
, and
must be unique. Consequently, the assumption does not hold, and we must have
. Thus, for case (
I), Lemma 3 holds true.
(II) Supposed that is inserted into at the link y. According to , the true insertion link for inserting into is marked by ℓ. Supposed . Let e be the ending node of link ℓ for . Recalling that a link could be solely represented by its ending node (referring to the proof of Lemma 1), then dual to case (a), we also can find , , and , whose sub-topology in varies from the given sub-topology in the true , violating the theoretical conclusion in Lemma 2. The assumption of (II) is not true and we must have . Lemma 3 also holds for case (II). Hence, Lemma 3 holds true. □
It is indicated by Lemma 3 that a correct network topology inference will be made as long as the previous inference is also correct. Since the network topology inference starts with a three-path-based sub-topology illustrated in
Figure 2, then the correct inference of the entire network topology is recursively guaranteed by the accurate knowledge of all the three-path-based sub-topologies. This makes Lemma 3 play the key role of network topology identifiability in the following inductive proof of Theorem 1.
Theorem 1. , , and , if given , we have .
Proof of Theorem 1. We employ mathematical induction to prove Theorem 1. When , it is obvious that Theorem 1 holds true. It is also easy to verify that Theorem 1 also holds true when . Now, we suppose Theorem 1 holds true for , where we have . We prove it that Theorem 1 will still hold true for .
We denote , where accordingly we have and . As Theorem 1 holds for , we get . Then recalling that we have already been given for , , and , there must be according to Lemma 3. Consequently, Theorem 1 also holds for . The mathematical induction is completed. Hence, Theorem 1 holds true. □
4. Discussions on the Design of Triple-Wise End-to-End Measurements
After conducting end-to-end measurements, shared path lengths between two end-to-end paths can be estimated with metrics such as delay covariances, loss rates, and so on. However, the heterogeneity from applications, routing policies/devices, and user population in each local network, etc., generally makes it hard for their cross-traffic to keep stable for consistent estimation. As investigated in [
15], inconsistency of such estimations will result in a low inference accuracy if end-to-end measurements are conducted with the same probing scheme (e.g., “back-to-back” probing) throughout the entire network regardless the heterogeneity of the cross-traffic. Consequently, before deploying the triple-wise end-to-end measurements, one should first be able to sense the load conditions of the cross-traffic for each path. For example, a potential way to sense the load insensitivity of the cross-traffic could be to constantly monitor the delay variance for each path.
Once the intensity of the cross-traffic is obtained, the end-to-end measurement scheme could be selected appropriately according to [
15]. Specifically, the triple-wise end-to-end measurement can be implemented with “sandwich” probing [
7] for the light cross-traffic, “back-to-back” probing for the moderate cross-traffic; or “loss” measurements when in a lossy network such as the wireless sensor network. For example, when the intervening paths bare a moderate-load cross-traffic, we can follow the line of “back-to-back” probing to design the triple-wise end-to-end delay measurement scheme as depicted in
Figure 3. Three closely spaced packets are sent from the source node
s to each of the destination node
i,
j, and
d. After collecting a sufficient number of end-to-end path delay samples for path
,
, and
, we are able to pairwise calculate the delay covariances for the estimation of
effectively.
As implied by Theorem 1, if fortunately some parts of the intervening network support ICMP query, such triple-wise end-to-end measurement could even be carried out in conjunction with traceroute [
20] in terms of Lemma 2. Moreover, our Theorem 1 also indicates that probing four (e.g., quadruple-wise) or more end-to-end paths at a time is feasible. Although so, the biggest challenge of the triple-wise end-to-end measurements might lie on the probing complexity [
16], which could be as complex as
, i.e., the total number of combinations of selecting three paths from
is as large as
. For the quadruple-wise end-to-end measurements, its probing complexity could be
, which will give rise to a serious question of practicality when conducted in large-scale networks. Such a high probing complexity will manifest itself when conducting triple-wise end-to-end measurements in a large-scale network. It is suggested to refer to some heuristics, as in [
13] the depth-first search, for a potential reduction in the probing complexity. Moreover, one can also follow the divide-and-rule tactics to solve the high probing complexity of the large-scale network. Specifically, they might first partition a large-scale network into multiple proper-scale sub-networks, and then conduct end-to-end measurements upon them. Through merging the topologies of these sub-networks [
19,
21], the original topology of the large-scale network will be reconstructed eventually. Moreover, errors exist during the triple-wise end-to-end measurements might also need to be carefully modeled regarding of practicability.


{kind=link}
{kind=link}
{kind=link}


