Wavenumber Imaging of Near-Surface Defects in Rails using Green’s Function Reconstruction of Ultrasonic Diffuse Fields

 and
and
Abstract
:1. Introduction
2. Green’s Function Retrieval Based on Diffuse Field Full Matrix
2.1. Diffuse Field in Rail
2.2. Full Matrix Reconstruction from Ultrasonic Phased Array
3. Experimental Signal Analysis
3.1. Experimental Setups
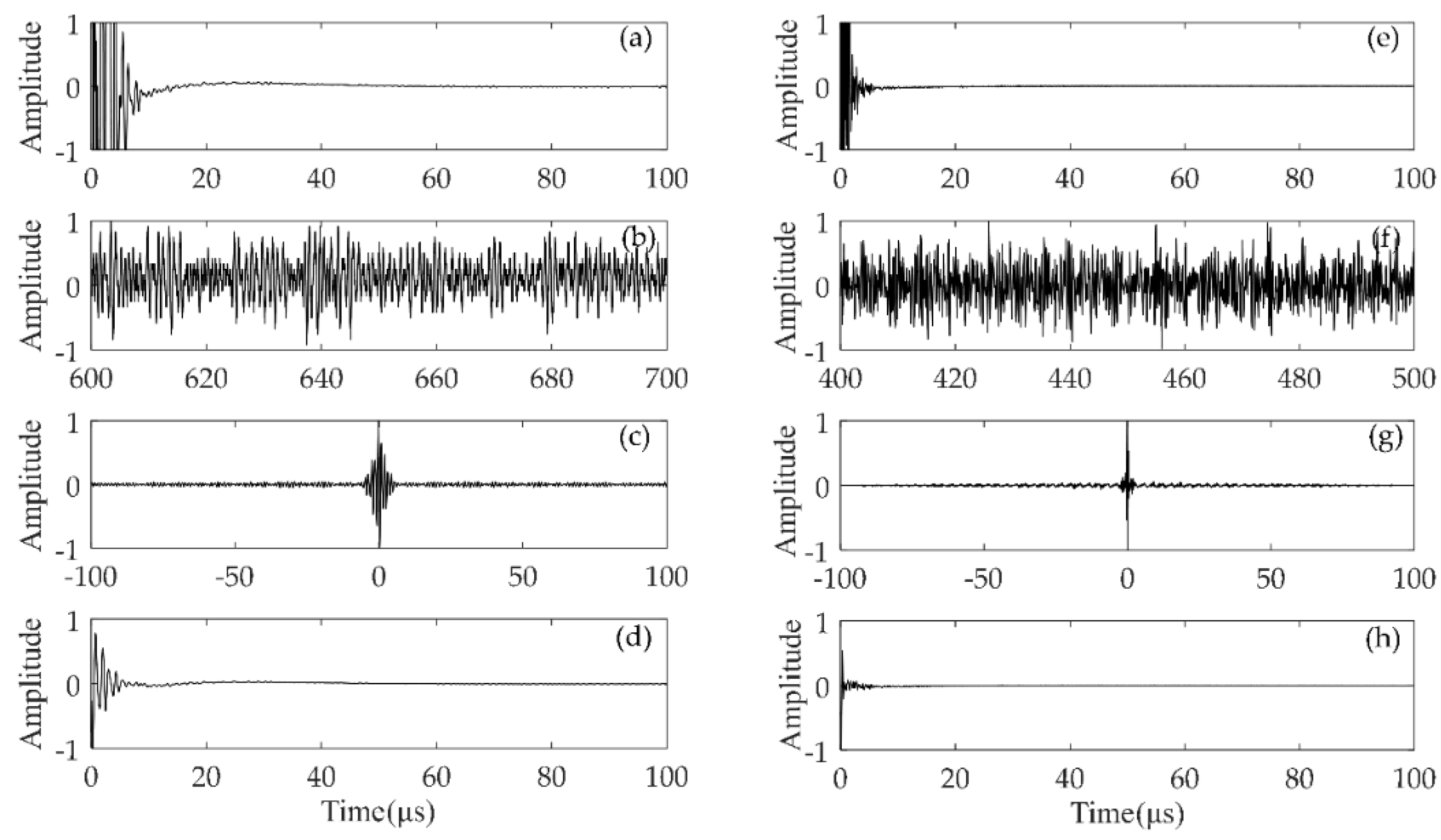
3.2. Signal Processing and Analysis
4. Wavenumber Imaging
4.1. Theory for Wavenumber Algorithm
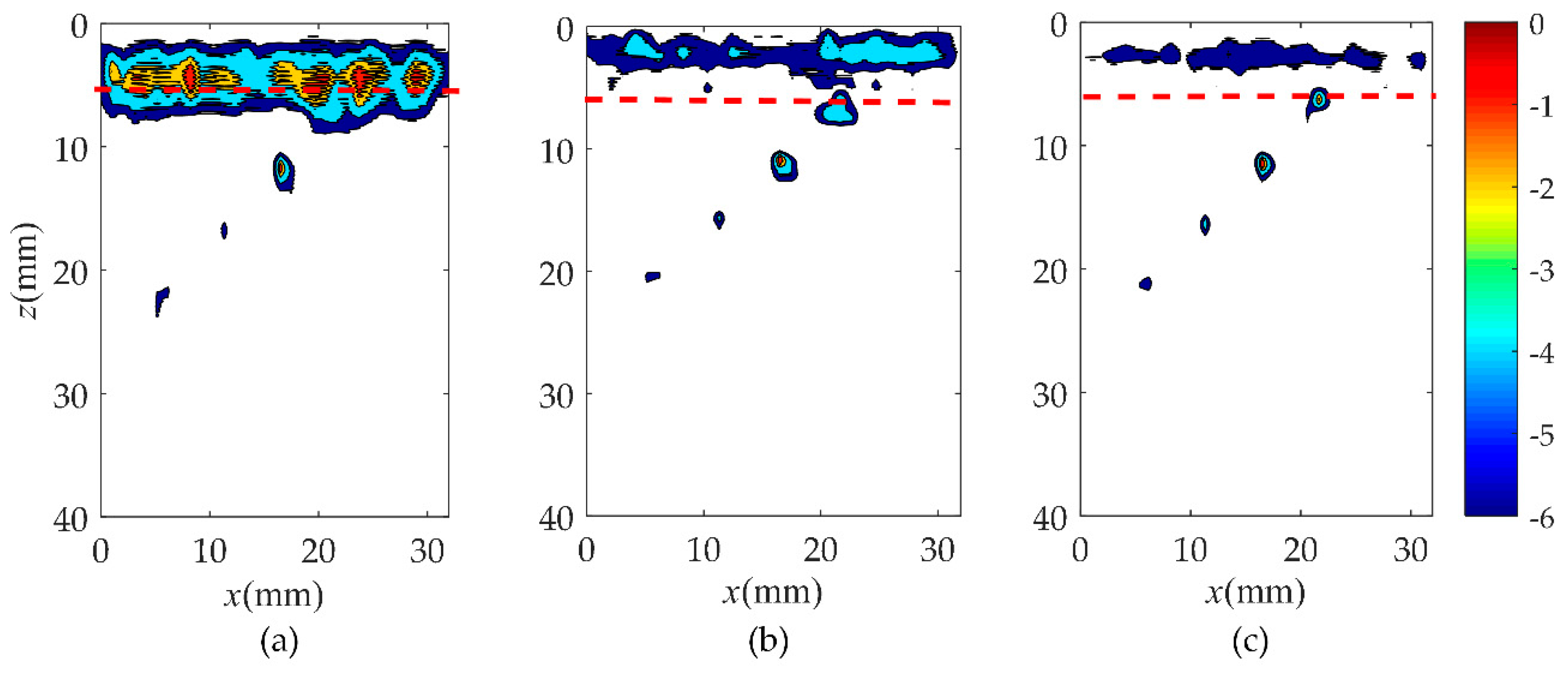
4.2. Near-Surface Defect Imaging in Rails
4.3. Influence of Diffuse Field Factors on Reconstructed Defects
4.3.1. The Duration, T, of the Time-Windowed Diffuse Field Signals
4.3.2. The Starting Time, Tc, of the Time-Windowed Diffuse Field Signals
5. Conclusions
- The cross-correlation operation of the diffuse field signals realizes the reconstruction of the Green’s function between two elements. The reconstructed full matrix recovered the early time information of the near-surface defects submerged in the blind zone. Furthermore, a hybrid full matrix was used to get a better reflection of the interested area in rails.
- The wavenumber algorithm was used to achieve the fast imaging using phased array probes with a different number of elements and excitation frequency. From the imaging results, it can be noticed that the imaging effects of near-surface defects have a relation with the number of elements and excitation frequency of the probes.
- The influence of the duration, T, and the starting time, Tc, of the time-windowed diffuse field signals on the reconstruction was discussed. The results indicate that with the larger window size and the longer starting time of the intercepted diffuse field signals, the imaging quality can be enhanced.
Author Contributions
Funding
Conflicts of Interest
References
- Rose, J.L. Ultrasonic Waves in Solid Media; Cambridge University Press: Cambridge, UK, 1999. [Google Scholar]
- Ostachowicz, W.; Kudela, P.; Krawczuk, M.; Zak, A. Guided Waves in Structures for SHM: The Time-Domain Spectral Element Method; JohnWiley & Sons, Ltd.: Hoboken, NJ, USA, 2012; p. 98. [Google Scholar]
- Miniaci, M.; Mazzotti, M.; Radzienski, M.; Kudela, P.; Kherraz, N.; Bosia, F.; Pugno, N.M.; Ostachowicz, W. Application of a laser-based time reversal algorithm for impact localization in a stiffened aluminium plate. Front. Mater. 2019, 6, 30. [Google Scholar] [CrossRef]
- Gliozzi, A.S.; Miniaci, M.; Bosia, F.; Pugno, N.M.; Scalerandi, M. Metamaterials-based sensor to detect and locate nonlinear elastic sources. Appl. Phys. Lett. 2015, 107, 161902. [Google Scholar] [CrossRef]
- Miniaci, M.; Gliozzi, A.S.; Morvan, B.; Krushynska, A.; Bosia, F.; Scalerandi, M.; Pugno, N.M. Proof of Concept for an Ultrasensitive Technique to Detect and Localize Sources of Elastic Nonlinearity Using Phononic Crystals. Phys. Rev. Lett. 2017, 118, 214301. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xiao, Z.; Guo, Y.; Geng, L.; Wu, J.; Zhang, F.; Wang, W.; Liu, Y. Acoustic Field of a Linear Phased Array: A Simulation Study of Ultrasonic Circular Tube Material. Sensors 2019, 19, 2352. [Google Scholar] [CrossRef] [PubMed]
- Bai, Z.; Chen, S.; Jia, L.; Zeng, Z. Ultrasonic Phased Array Compressive Imaging in Time and Frequency Domain: Simulation, Experimental Verification and Real Application. Sensors 2018, 18, 1460. [Google Scholar] [CrossRef] [PubMed]
- Park, B.; Sohn, H.; Olson, S.E.; DeSimio, M.P.; Brown, K.S.; Derriso, M.M. Impact localization in complex structures using laser-based time reversal. Struct. Health Monit. 2012, 11, 577–588. [Google Scholar] [CrossRef]
- Lobkis, O.I.; Weaver, R.L. On the emergence of the Green’s function in the correlations of a diffuse field. J. Acoust. Soc. Am. 2001, 110, 3010–3017. [Google Scholar] [CrossRef]
- Weaver, R.L.; Lobkis, O.I. On the emergence of the Green’s function in the correlations of a diffuse field: Pulse-echo using thermal phonons. Ultrasonics 2002, 40, 435–439. [Google Scholar] [CrossRef]
- Sabra, K.G.; Srivastava, A.; Lanza di Scalea, F.; Bartoli, I.; Rizzo, P.; Conti, S. Structural health monitoring by extraction of coherent guided waves from diffuse fields. J. Acoust. Soc. Am. 2008, 123, 8–13. [Google Scholar] [CrossRef]
- Chaves, E.J.; Schwartz, S.Y. Monitoring transient changes within overpressured regions of subduction zones using ambient seismic noise. Sci. Adv. 2016, 2, e1501289. [Google Scholar] [CrossRef] [Green Version]
- Artman, B. A return to passive seismic imaging. Stanf. Explor. Proj. Stanf. 2002, 111, 361–369. [Google Scholar]
- Shapiro, N.M.; Campillo, M. Emergence of broadband Rayleigh waves from correlations of the ambient noise. Geophys. Res. Lett. 2004, 31. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, Y.; Fan, G.; Zhang, H.; Zhu, W.; Zhu, Q. Sparse-TFM Imaging of Lamb Waves for the Near-Distance Defects in Plate-Like Structures. Metals 2019, 9, 503. [Google Scholar] [CrossRef]
- Mirgorodski, V.I.; Gerasimov, V.V.; Peshin, S.V. Experimental studies of passive correlation tomography of incoherent acoustic sources in the megahertz frequency band. Acoust. Phys. 2006, 52, 606–612. [Google Scholar] [CrossRef]
- Roux, P.; Kuperman, W.A.; Group, N. Extracting coherent wave fronts from acoustic ambient noise in the ocean. J. Acoust. Soc. Am. 2004, 116, 1995–2003. [Google Scholar] [CrossRef]
- Sabra, K.G.; Roux, P.; Thode, A.M.; D’Spain, G.L.; Hodgkiss, W.S.; Kuperman, W.A. Using ocean ambient noise for array self-localization and self-synchronization. IEEE J. Ocean. Eng. 2005, 30, 338–347. [Google Scholar] [CrossRef]
- Sabra, K.G.; Conti, S.; Roux, P.; Kuperman, W.A. Passive in vivo elastography from skeletal muscle noise. Appl. Phys. Lett. 2007, 90, 194101. [Google Scholar] [CrossRef]
- Potter, J.N.; Wilcox, P.D.; Croxford, A.J. Diffuse field full matrix capture for near surface ultrasonic imaging. Ultrasonics 2018, 82, 44–48. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tant, K.M.M.; Mulholland, A.J.; Gachagan, A. Application of the Factorisation Method to Limited Aperture Ultrasonic Phased Array Data. Acta Acust. United Acust. 2017, 103, 954–966. [Google Scholar] [CrossRef] [Green Version]
- Stepinski, T. An Implementation of Synthetic Aperture Focusing Technique in Frequency Domain. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2007, 54, 1399–1408. [Google Scholar] [CrossRef] [PubMed]
- Hunter, A.J.; Drinkwater, B.W.; Wilcox, P.D. The wavenumber algorithm for full-matrix imaging using an ultrasonic array. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2008, 55, 2450–2462. [Google Scholar] [CrossRef] [PubMed]
- Hunter, A.J.; Drinkwater, B.W.; Wilcox, P.D. Autofocusing ultrasonic imagery for non-destructive testing and evaluation of specimens with complicated geometries. NDT E Int. 2010, 43, 78–85. [Google Scholar] [CrossRef]
- Soumekh, M. Reconnaissance with ultra-wideband UHF synthetic aperture radar. IEEE Signal Process. Mag. 1995, 12, 21–40. [Google Scholar] [CrossRef]
- Moghimirad, E.; Villagomez-Hoyos, C.A.; Mahloojifar, A.; Asl, B.M.; Jensen, J.A. Synthetic Aperture Ultrasound Fourier Beamformation Using Virtual Sources. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2016, 63, 2018–2030. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Zhang, H.; Xu, M. Ultrasonic phased array wavenumber imaging algorithm for rail defects. J. Appl. Acoust. 2018, 37, 3–10. [Google Scholar]
- Li, G.; Li, J. Passive imaging of scatterers based on cross-correlations of ambient noise. Acta Acust. 2016, 41, 49–58. [Google Scholar]
- Zhang, H.; Zhang, J.; Fan, G.; Zhang, H.; Zhu, W.; Zhu, Q.; Zheng, R. The Auto-Correlation of Ultrasonic Lamb Wave Phased Array Data for Damage Detection. Metals 2019, 9, 666. [Google Scholar] [CrossRef]
- Muller, A.; Robertson-Welsh, B.; Gaydecki, P.; Gresil, M.; Soutis, C. Structural Health Monitoring Using Lamb Wave Reflections and Total Focusing Method for Image Reconstruction. Appl. Compos. Mater. 2017, 24, 553–573. [Google Scholar] [CrossRef]
- Marchi, L.D.; Marzani, A.; Miniaci, M. A dispersion compensation procedure to extend pulse-echo defects location to irregular waveguides. NDT E Int. 2013, 54, 115–122. [Google Scholar] [CrossRef]
- Sun, F.; Zeng, Z.M.; Jin, S.J.; Chen, S.L. Sound-field of Discrete Point Sources Simulation on Deflecting and Focusing of Near-field of Ultrasonic Phased Array. J. Syst. Simul. 2013, 25, 1108–1112. [Google Scholar]
- Callow, H.J.; Hayes, M.P.; Gough, P.T. Wavenumber domain reconstruction of SAR/SAS imagery using single transmitter and multiple receiver geometry. Electron. Lett. 2002, 38, 336–337. [Google Scholar] [CrossRef]
- Moghimirad, E.; Mahloojifar, A.; Mohammadzadeh Asl, B. Computational Complexity Reduction of Synthetic Aperture Focus in Ultrasound Imaging Using Frequency-Domain Reconstruction. Ultrason. Imaging 2015, 38, 175–193. [Google Scholar] [CrossRef] [PubMed]
- Holmes, C.; Drinkwater, B.W.; Wilcox, P.D. Post-processing of the full matrix of ultrasonic transmit–receive array data for non-destructive evaluation. NDT E Int. 2005, 38, 701–711. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Phased Array Probe | The Number of Elements | Excitation Frequency | Element Width | Element Pitch |
|---|---|---|---|---|
| probe A | 16 | 1.0 MHz | 1.8 mm | 2.0 mm |
| probe B | 32 | 2.5 MHz | 0.9 mm | 1.0 mm |
| probe C | 32 | 5.0 MHz | 0.9 mm | 1.0 mm |
| Case | The Number of Element | Excitation Frequency |
|---|---|---|
| Case 1 | 16 | 1.0 MHz |
| Case 2 | 16 | 2.5 MHz |
| Case 3 | 32 | 2.5 MHz |
| Parameters | Value |
|---|---|
| Tc | 500 μs |
| 1.0 × 106 | |
| tc | 1.2 μs |
| Parameters | Value |
|---|---|
| T | 120 μs |
| 1.0 × 106 | |
| tc | 1.2 μs |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Zhang, H.; Zhang, J.; Liu, J.; Zhu, W.; Fan, G.; Zhu, Q. Wavenumber Imaging of Near-Surface Defects in Rails using Green’s Function Reconstruction of Ultrasonic Diffuse Fields. Sensors 2019, 19, 3744. https://doi.org/10.3390/s19173744
Zhang H, Zhang H, Zhang J, Liu J, Zhu W, Fan G, Zhu Q. Wavenumber Imaging of Near-Surface Defects in Rails using Green’s Function Reconstruction of Ultrasonic Diffuse Fields. Sensors. 2019; 19(17):3744. https://doi.org/10.3390/s19173744
Chicago/Turabian StyleZhang, Hui, Haiyan Zhang, Jiayan Zhang, Jianquan Liu, Wenfa Zhu, Guopeng Fan, and Qi Zhu. 2019. "Wavenumber Imaging of Near-Surface Defects in Rails using Green’s Function Reconstruction of Ultrasonic Diffuse Fields" Sensors 19, no. 17: 3744. https://doi.org/10.3390/s19173744