Reliable Indoor Pseudolite Positioning Based on a Robust Estimation and Partial Ambiguity Resolution Method


Abstract
1. Introduction
2. Methods
2.1. Indoor PL Positioning Model
2.2. Robust UKF
2.3. PAR for PL Positioning
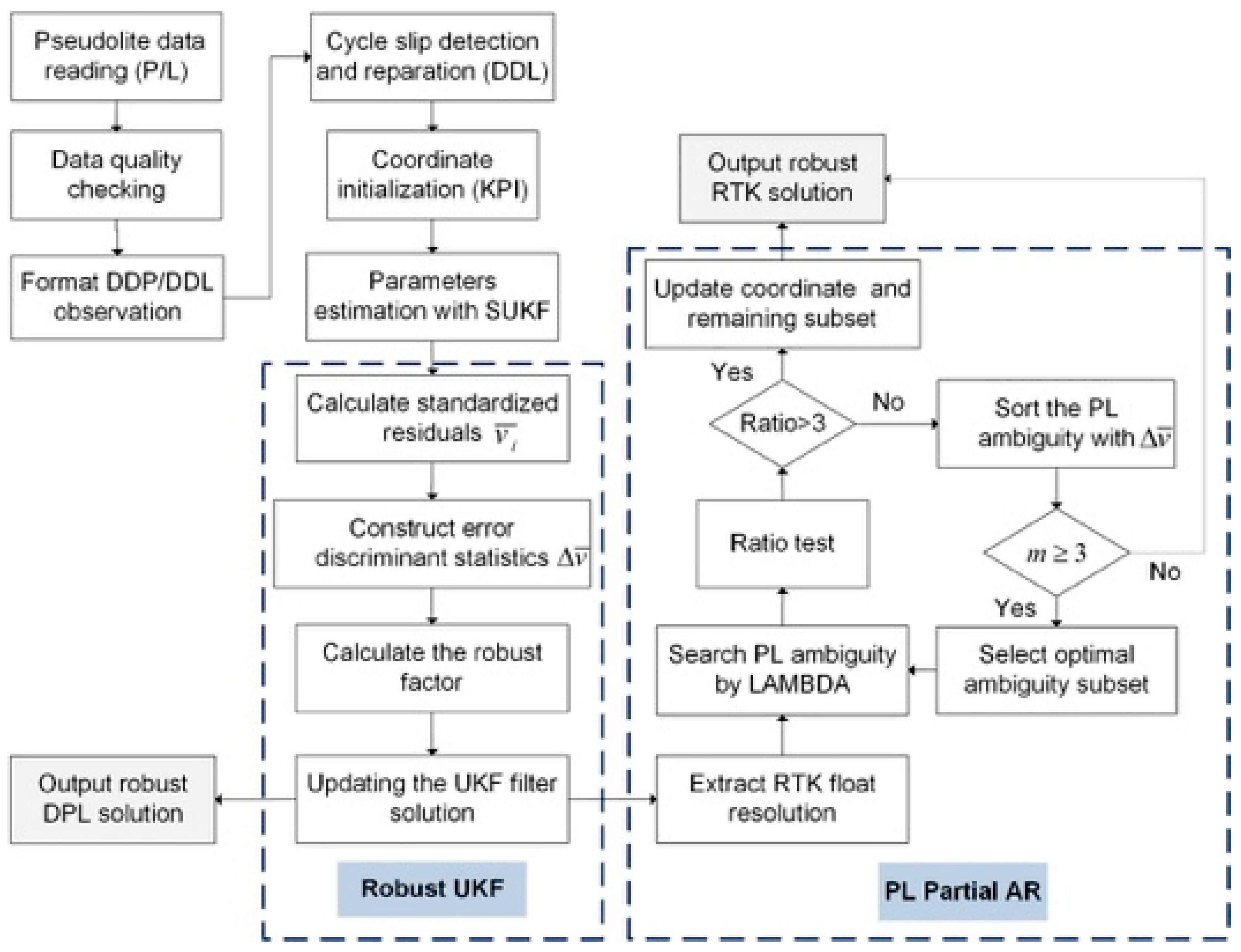
2.4. Data Processing
3. Experimental Results and Analysis
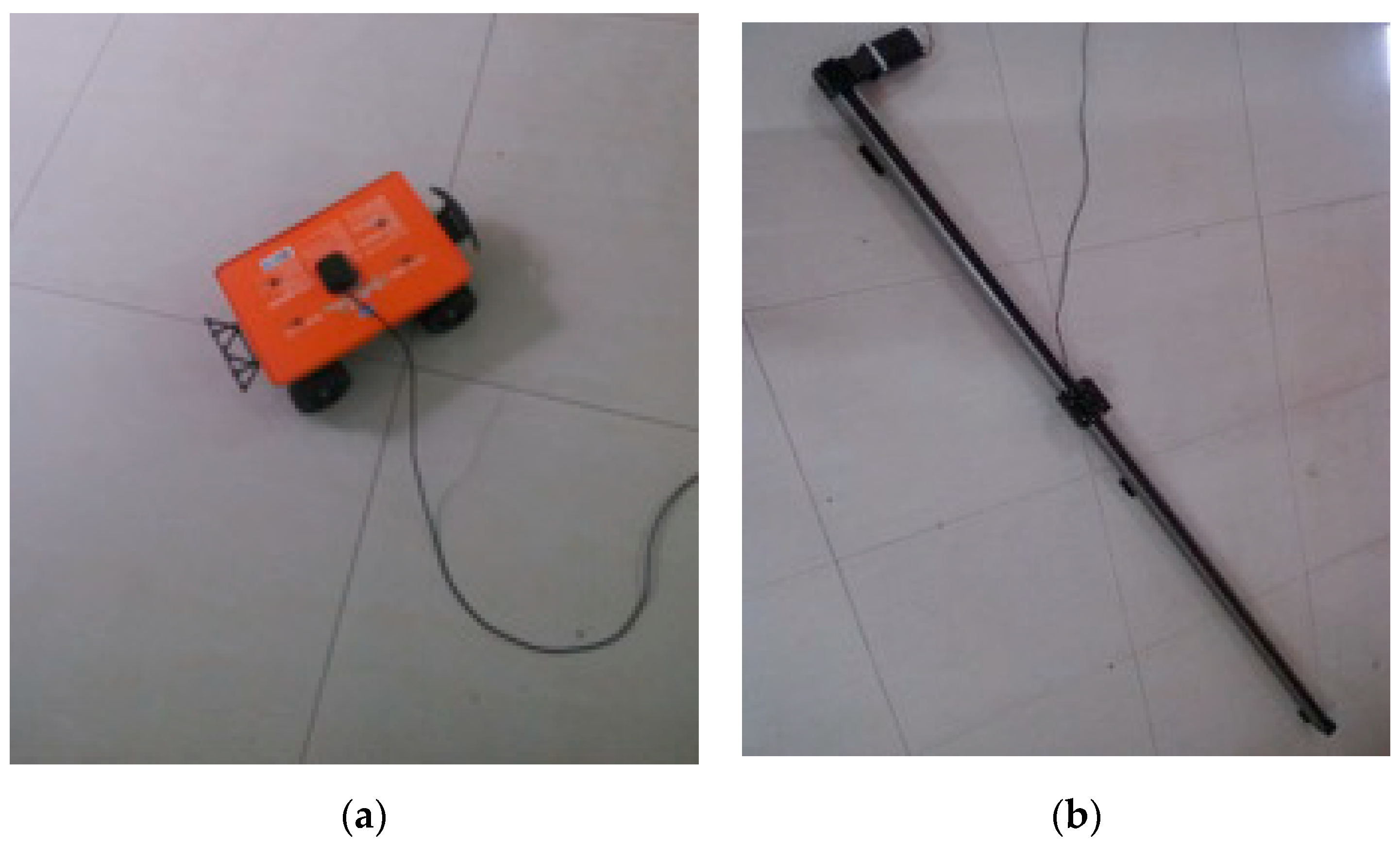
3.1. Observation Platform of the Indoor Positioning System
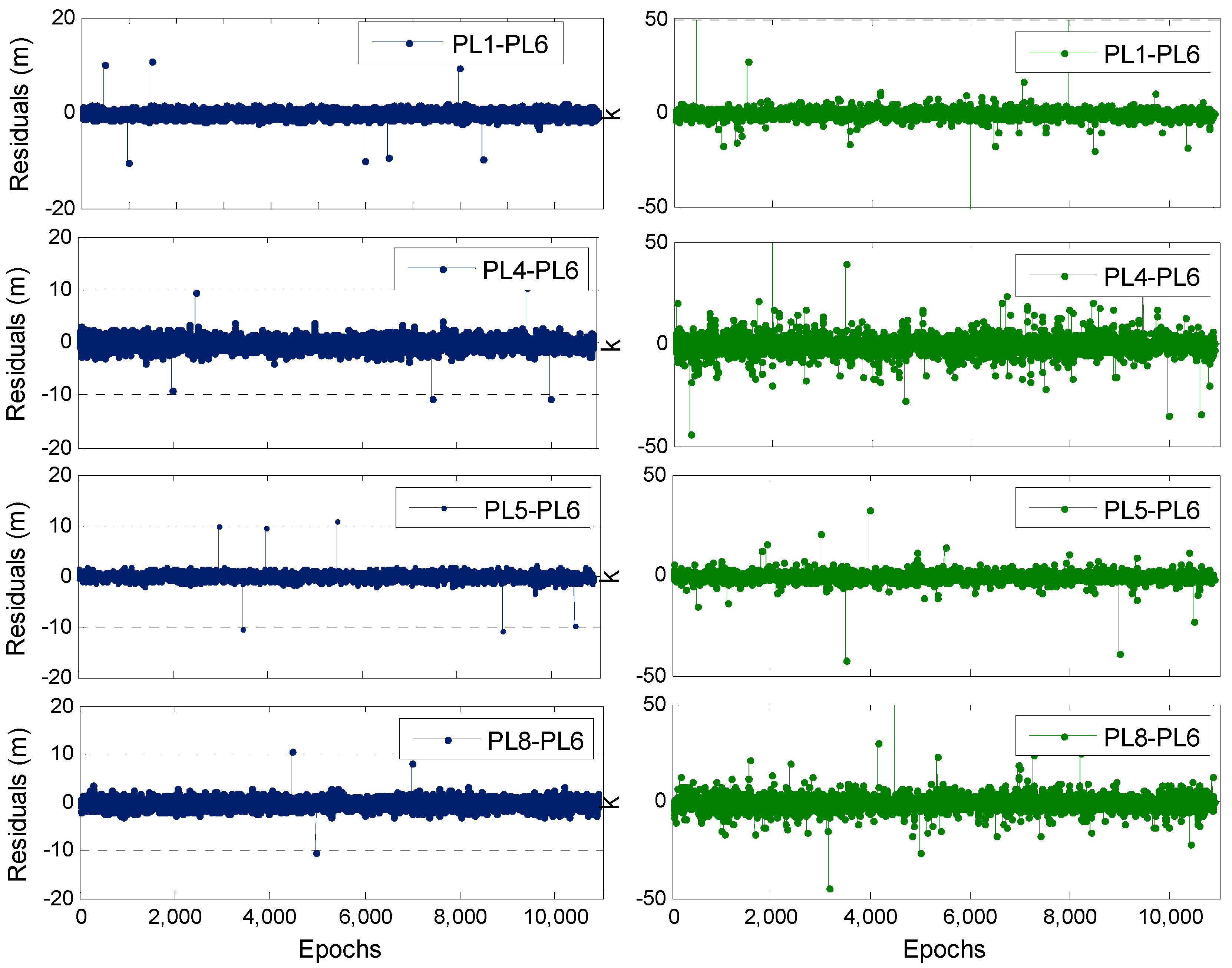
3.2. DPL Model
3.3. RTK Model
3.3.1. Static Test
3.3.2. Kinematic Test
4. Conclusions
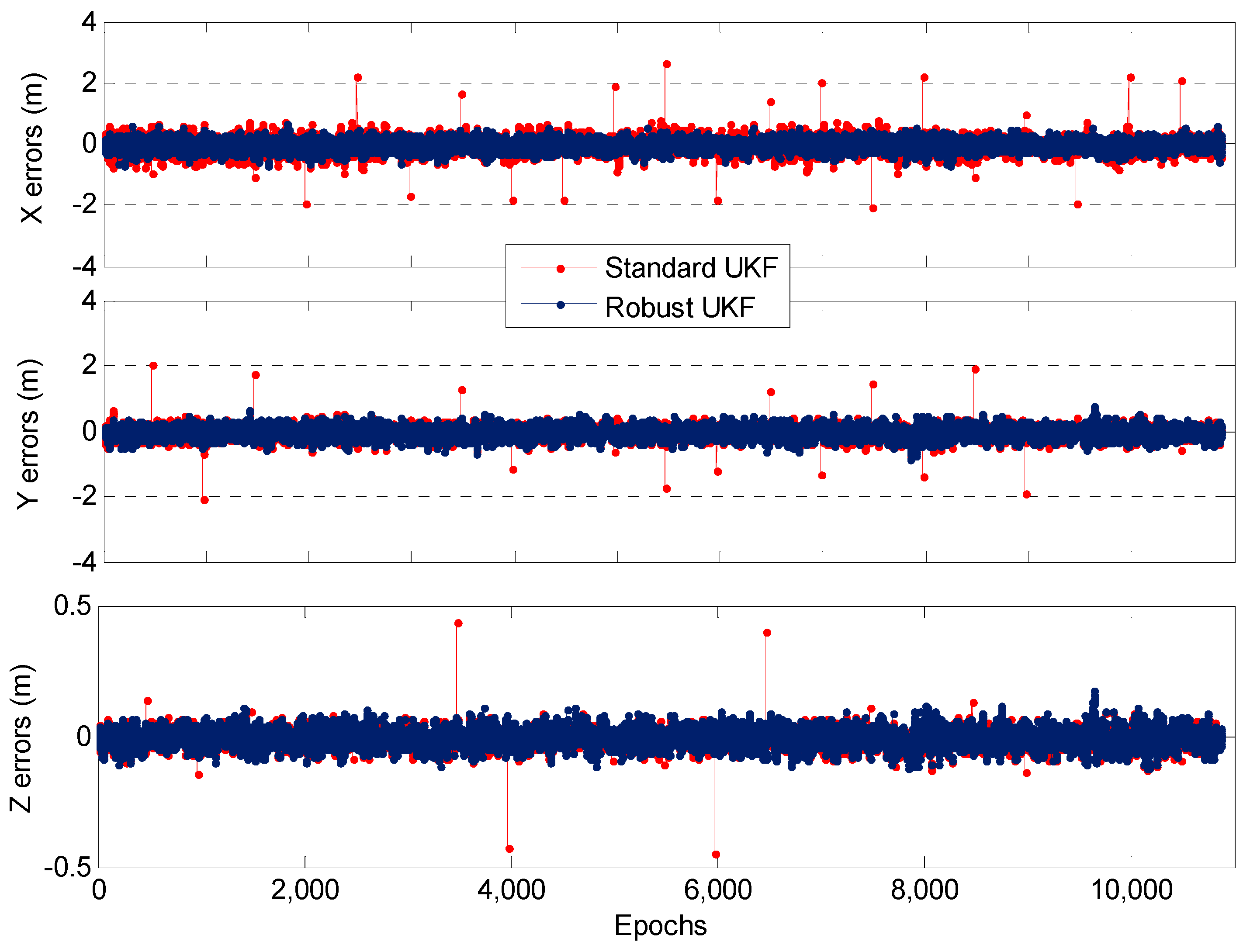
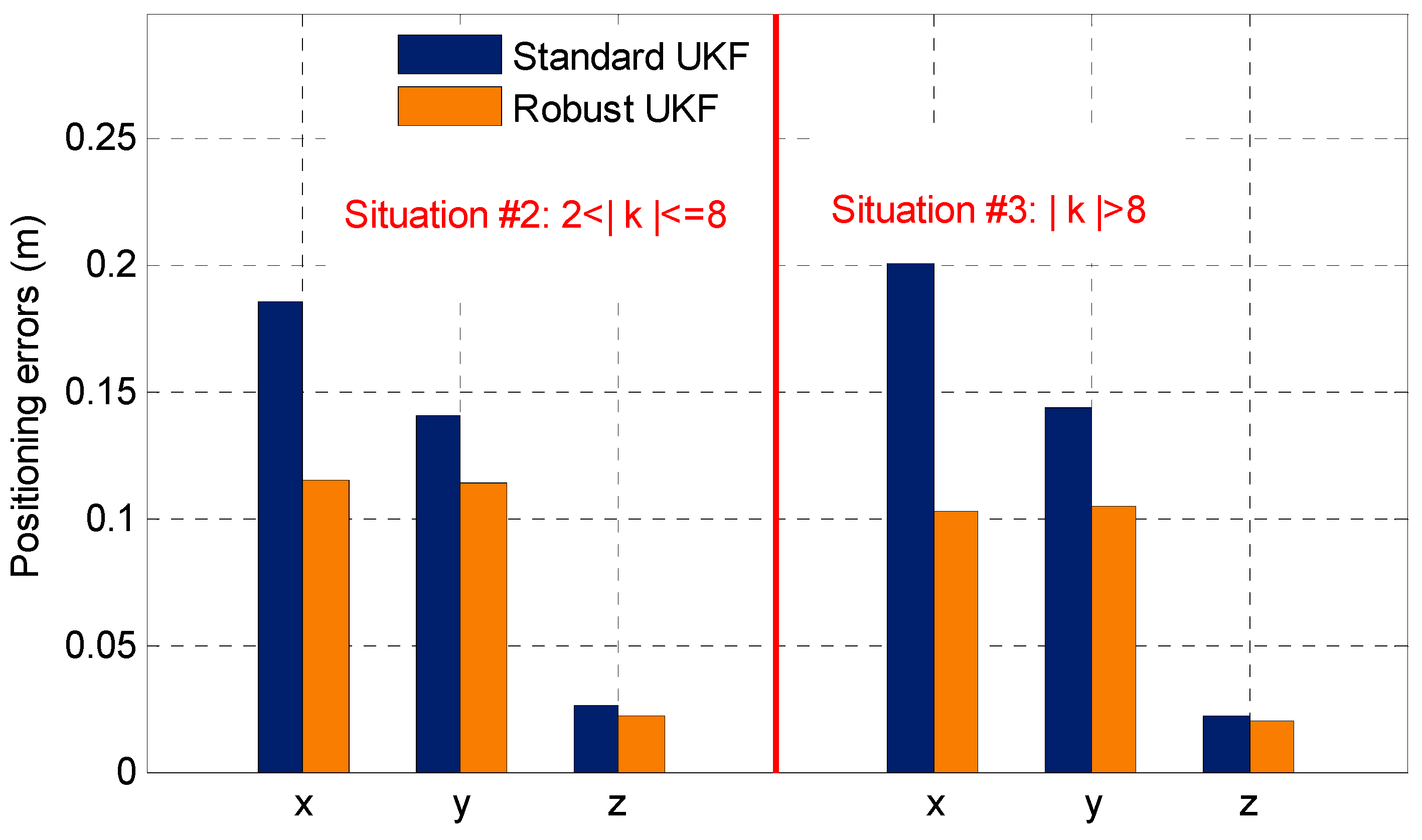
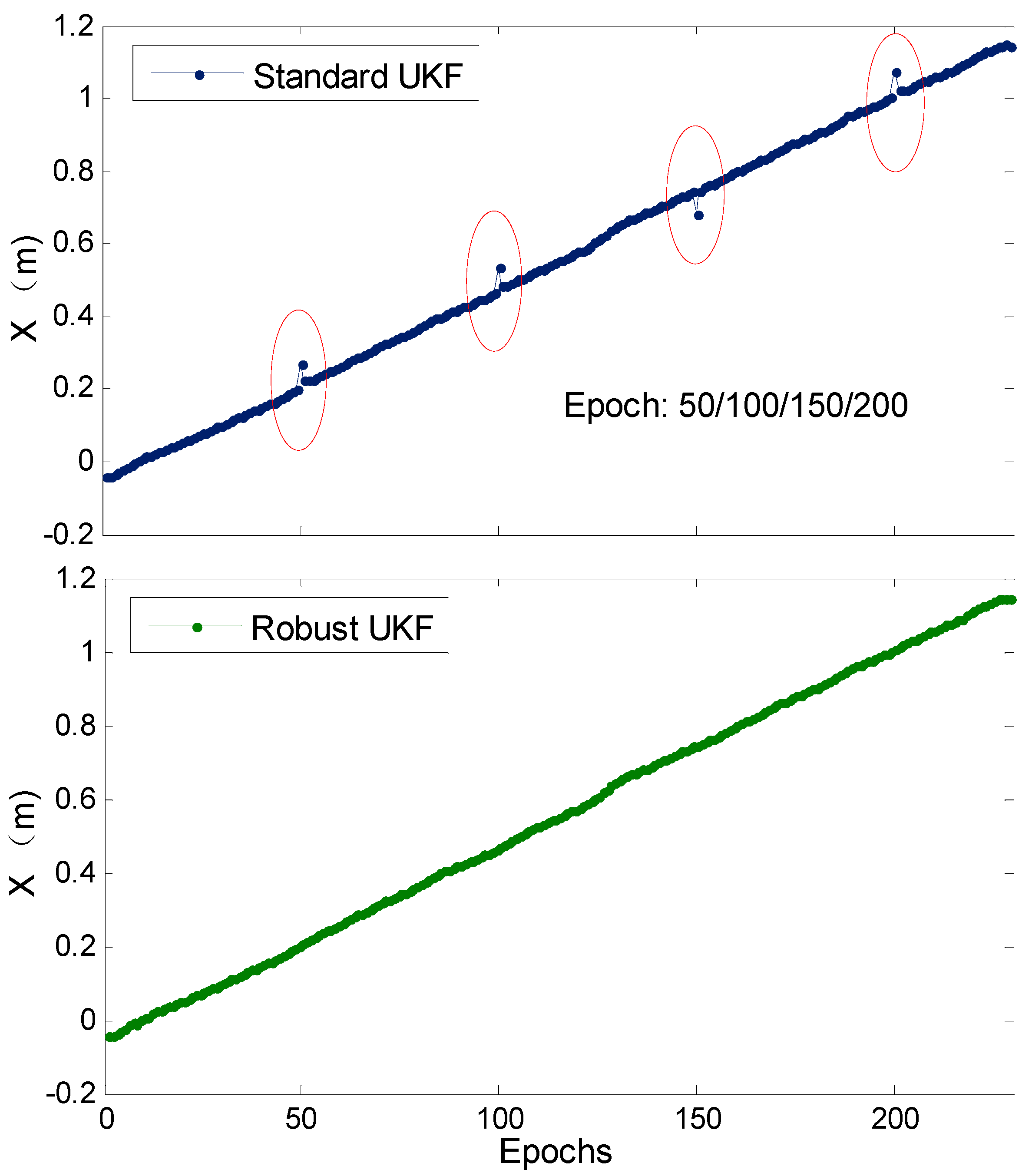
- Compared with the SUKF algorithm, the RUKF algorithm can effectively weaken the anomalous effect of PL code observations and improve the accuracy and reliability of indoor DPL positioning, especially when certain large gross errors exist.
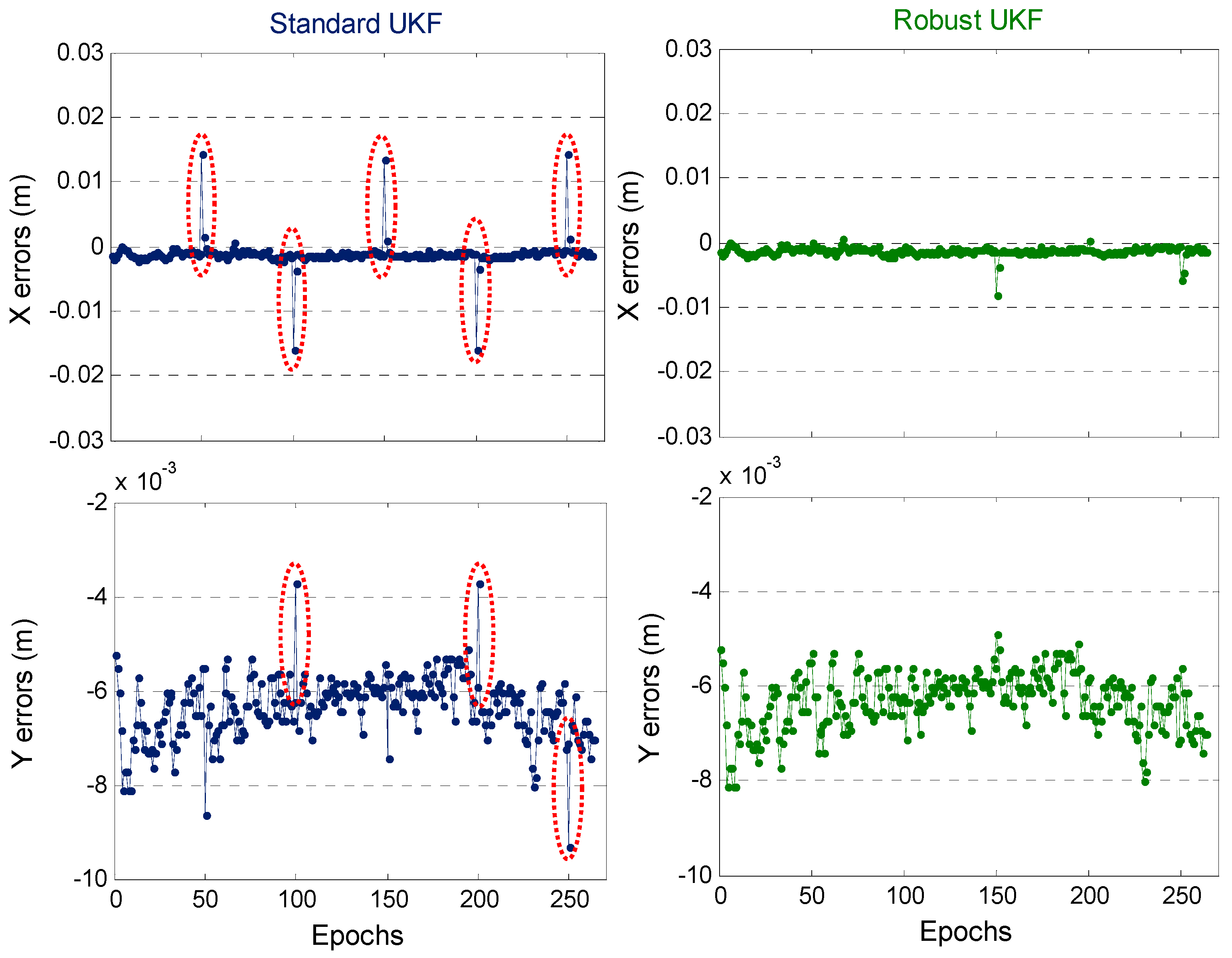
- RUKF can identify small gross errors (centimeter-level) of PL carrier observations and achieve the corresponding indoor RTK positioning accuracy of fixed solutions at a centimeter-level improvement.
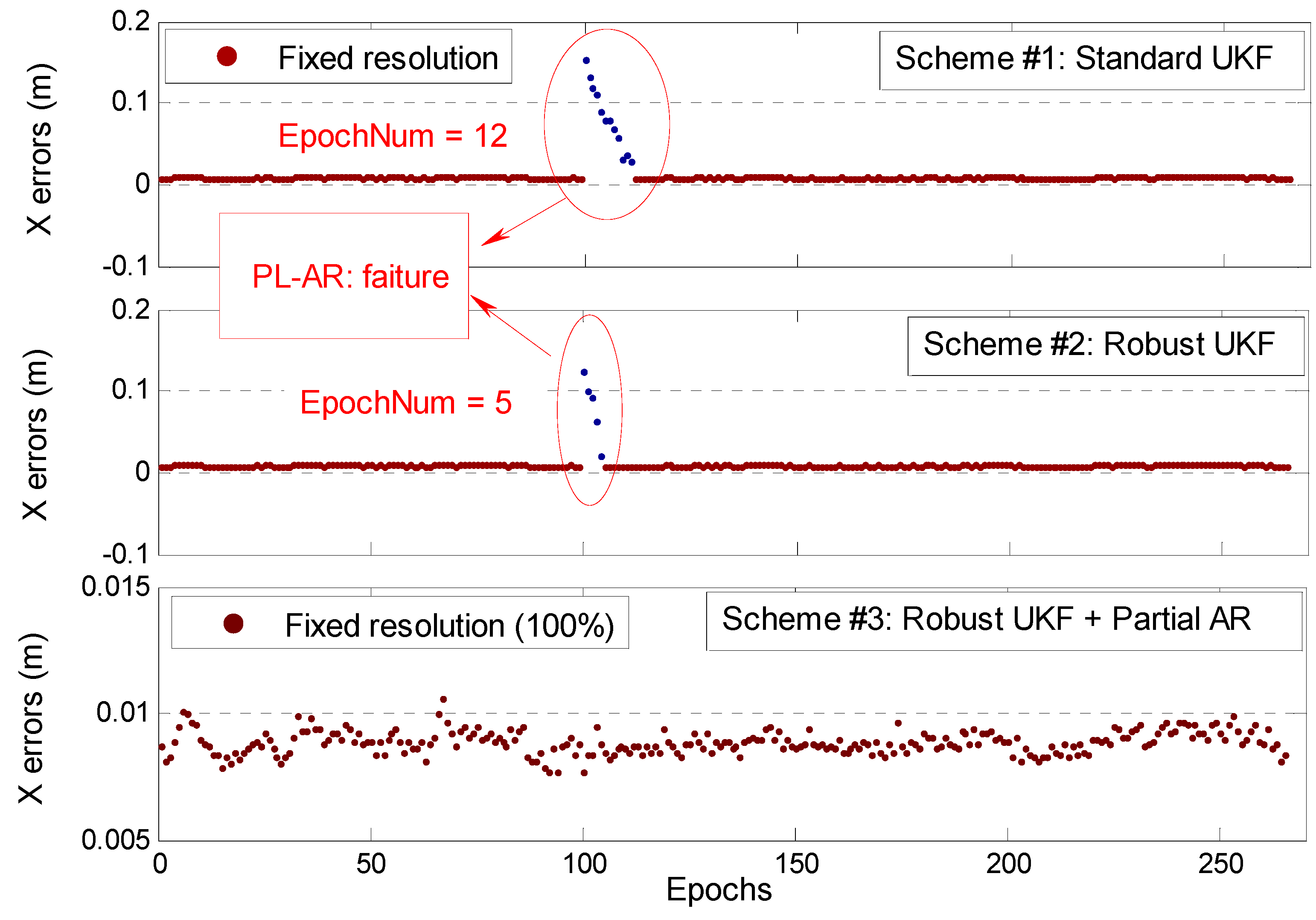
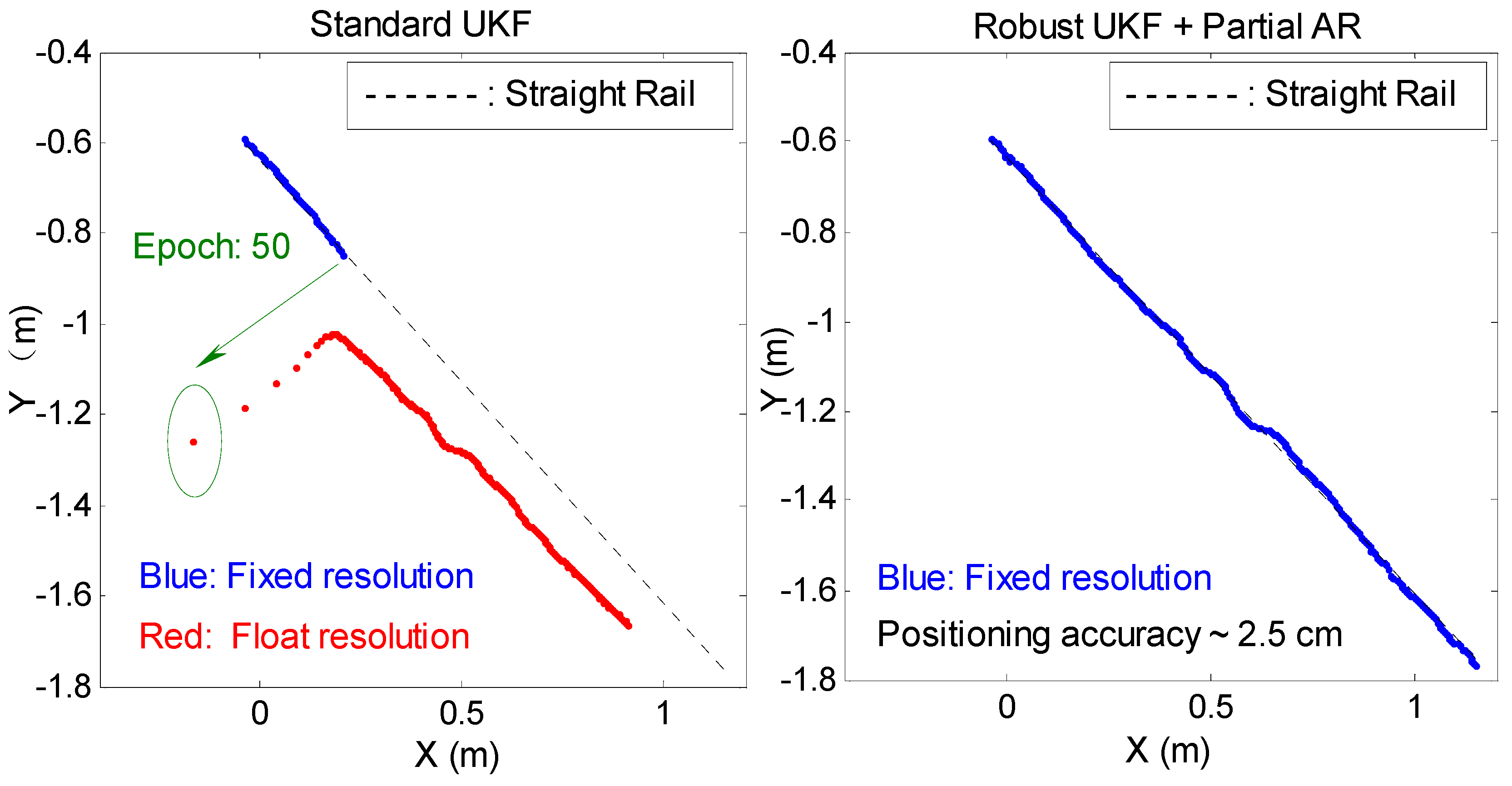
- Compared with SUKF, RUKF can improve the accuracy of ambiguity float solution and the re-convergence speed when the carrier phase observation has relatively large gross errors. However, RUKF cannot achieve PL-AR successfully. The proposed RUKF combined with PAR strategy can achieve partial PL-AR for the selected ambiguity subset and obtain an accurate fixed solution. The advantages of our proposed algorithm are important for indoor PL kinematic positioning.
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Klein, D.; Parkinson, B.W. The Use of Pseudo-Satellites for Improving GPS Performance. Navigation 1984, 31, 303–315. [Google Scholar] [CrossRef]
- Cobb, H.S. GPS Pseudolites: Theory, Design, and Applications. Ph.D. Thesis, Stanford University Stanford, Stanford, CA, USA, 1997. [Google Scholar]
- Wang, J. Pseudolite Applications in Positioning and Navigation: Progress and Problems. J. Glob. Position. Syst. 2002, 1, 48–56. [Google Scholar] [CrossRef]
- Wang, J.; Tsujii, T.; Rizos, C.; Dai, L.; Moore, M. Integrating GPS and Pseudolite Signals for Position and Attitude Determination: Theoretical Analysis and Experiment Results. In Proceedings of the 13th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 2000), Salt Lake City, UT, USA, 19–22 September 2000; pp. 2252–2262. [Google Scholar]
- Kuusniemi, H.; Bhuiyan, M.Z.H.; Ström, M.; Söderholm, S.; Jokitalo, T.; Chen, L.; Chen, R. Utilizing Pulsed Pseudolites and Highsensitivity GNSS for Ubiquitous Outdoor/Indoor Satellite Navigation. In Proceedings of the International Conference on Indoor Positioning and Indoo Navigation, Sydney, Australia, 13–15 November 2012. [Google Scholar]
- Meng, X.; Roberts, G.; Dodson, A.; Cosser, E.; Barnes, J.; Rizos, C. Impact of GPS Satellite and Pseudolite Geometry on Structural Deformation Monitoring: Analytical and Empirical Studies. J. Geod. 2004, 77, 809–822. [Google Scholar] [CrossRef]
- Rizos, C.; Barnes, J.; Small, D.; Voigt, G.; Gambale, N. A New Pseudolite-Based Positioning Technology for High Precision Indoor and Outdoor Positioning. In Proceedings of the International Symposium and Exhibition on Geoinformation, Shah Alam, Malaysia, 13–14 October 2003. [Google Scholar]
- Kee, C.; Yun, D.; Jun, H.; Parkinson, B.; Pullen, S.; Lagenstein, T. Centimeter-Accuracy Indoor Navigation Using GPS-Like Pseudolites. GPS World 2001. [Google Scholar]
- Kee, C.; Jun, H.; Yun, D. Development of Indoor Navigation System Using Asynchronous Pseudolites. In Proceedings of the ION-GPS 2000, Salt Lake City, UT, USA, 19–22 September 2000. [Google Scholar]
- Xu, R.; Chen, W.; Xu, Y.; Ji, S. A New Indoor Positioning System Architecture Using GPS Signals. Sensors 2015, 15, 10074–10087. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.; Guo, J.; Luo, N.; Wang, L.; Wang, W.; Wen, K. Improving Wi-Fi Fingerprint Positioning with a Pose Recognition-Assisted SVM Algorithm. Remote Sens. 2019, 11, 652. [Google Scholar] [CrossRef]
- Xu, H.; Ding, Y.; Li, P.; Wang, R.; Li, Y. An RFID Indoor Positioning Algorithm Based on Bayesian Probability and K-Nearest Neighbor. Sensors 2017, 17, 1806. [Google Scholar] [CrossRef]
- Minne, K.; Macoir, N.; Rossey, J.; Van den Brande, Q.; Lemey, S.; Hoebeke, J.; De Poorter, E. Experimental Evaluation of UWB Indoor Positioning for Indoor Track Cycling. Sensors 2019, 19, 2041. [Google Scholar] [CrossRef]
- Bonenberg, L.K. Closely-Coupled Integration of Locata and GPS for Engineering Applications. Ph.D. Thesis, University of Nottingham, Nottingham, UK, 2014. [Google Scholar]
- Rizos, C.; Roberts, G.; Barnes, J.; Gambale, N. Experimental results of Locata: A high Accuracy Indoor Positioning System. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010. [Google Scholar]
- Li, X.; Zhang, P.; Guo, J.; Wang, J.; Qiu, W. A New Method for Single-Epoch Ambiguity Resolution with Indoor Pseudolite Positioning. Sensors 2017, 17, 921. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, P.; Guo, J.; Li, X.; Wang, J.; Yang, F.; Wang, X. A New Method of High-Precision Positioning for An Indoor Pseudolite Without Using the Known Point Initialization. Sensors 2018, 18, 1977. [Google Scholar] [CrossRef]
- Li, T.; Wang, J.; Huang, J. Analysis of Ambiguity Resolution in Precise Pseudolite Positioning. In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation, Sydney, Australia, 13–15 November 2012; pp. 1–7. [Google Scholar]
- Guo, J.; Li, X.; Zhang, P. Research on Indoor Pseudolite Positioning Based on Fixed Point Initialization. J. Geomat. 2017, 42, 1–4. [Google Scholar]
- Teunissen, P.J.G. Least-Squares Estimation of the Integer GPS Ambiguities. In Proceedings of the IAG General Meeting, Beijing, China, 6–13 August 1993. [Google Scholar]
- Teunissen, P.J.G. The Least-Squares Ambiguity Decorrelation Adjustment: A Method for Fast GPS Integer Ambiguity Estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Jiang, W.; Li, Y.; Rizos, C. Locata-Based Precise Point Positioning for Kinematic Maritime Applications. GPS Solut. 2015, 19, 117–128. [Google Scholar] [CrossRef]
- Sorenson, H.W. Kalman Filtering: Theory and Application; The Institute of Electrical and Electronics Engineers, Inc.: New York, NY, USA, 1985; pp. 131–150. [Google Scholar]
- Brown, R.G.; Hwang, P.Y. Introduction to Random Signals and Applied Kalman Filtering with Matlab Exercises and Solutions, 3rd ed.; Wiley: New York, NY, USA, 1997; Volume 3. [Google Scholar]
- Kee, C.; Kim, J.; So, H.; Jun, H.; Parkinson, B.; Hansen, W. Effect of the Error in Lineof Sight Unit Vector on the Accuracy of GPS and Pseudolite Navigation System. Comput. Math. Appl. 2004, 48, 779–787. [Google Scholar] [CrossRef]
- Dai, L.; Wang, J.; Tsujii, T.; Rizos, C. Pseudolite applications in positioning and navigation: Modelling and geometric analysis. J. Navig. 2001, 482–489. [Google Scholar]
- Li, X.; Zhang, P.; Huang, G.; Zhang, Q.; Guo, J.; Zhao, Y.; Zhao, Q. Performance Analysis of Indoor Pseudolite Positioning Based on the Unscented Kalman Filter. GPS Solut. 2019, 23. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K.; Durrant-Whyte, H.F. A New Approach for Filtering Nonlinear System. In Proceedings of the American Control Conference, Seattle, WA, USA, 21–23 June 1995; pp. 1628–1632. [Google Scholar]
- Julier, S.; Uhlmann, J.; Durrant-Whyte, H.F. A New Method for the Nonlinear Transformation of Means and Covariances in Filters and Estimators. IEEE Trans. Autom. Control 2000, 45, 477–482. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. Reduced Sigma Point Filters for the Propagation of Means and Covariances Through nonlinear Transformations. In Proceedings of the American Control Conference, Jefferson City, MO, USA, 8–10 May 2002; pp. 887–892. [Google Scholar]
- Yang, Y. Adaptively Robust Kalman Filters with Applications in Navigation. In Sciences of Geodesy-I; Springer: Berlin, Germany, 14 June 2010; pp. 49–82. [Google Scholar]
- Li, W.; Sun, S.; Jia, Y.; Du, J. Robust Unscented Kalman Filter with Adaptation of Process and Measurement Noise Covariances. Digit. Signal Process. 2010, 48, 93–103. [Google Scholar] [CrossRef]
- Yang, Y. Robust Bayesian Estimation. J. Geod. 1991, 65, 145–150. [Google Scholar]
- Egbert, G.D.; Booker, J.R. Robust Estimation of Geomagnetic Transfer Functions. Geophys. J. R. Astron. Soc. 1986, 87, 173–194. [Google Scholar] [CrossRef]
- Durovic, Z.M.; Kovacevic, B.D. Robust Estimation with Unknown Noise Statistics. IEEE Trans. Autom. Control 1999, 44, 1292–1296. [Google Scholar] [CrossRef]
- Carpenter, J.R.; Kenward, M.G.; Vansteelandt, S. A Comparison of Multiple Imputation and Doubly Robust Estimation for Analyses with Missing Data. J. R. Stat. Soc. 2006, 169, 571–584. [Google Scholar] [CrossRef]
- Xiong, K.; Wei, C.L.; Liu, L.D. Robust Unscented Kalman Filtering for Nonlinear Uncertain Systems. Asian J. Control 2010, 12, 426–433. [Google Scholar] [CrossRef]
- Gui, Q.; Zhang, J. Robust Biased Estimation and Its Application in Geodetic Adjustments. J. Geod. 1998, 72, 430–435. [Google Scholar] [CrossRef]
- Zhao, X.; Li, J.; Yan, X.; Ji, S. Robust Adaptive Cubature Kalman Filter and Its Application to Ultra-Tightly Coupled SINS/GPS Navigation System. Sensors 2018, 18, 2352. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Yang, Y.; Xu, J.; He, H.; Guo, H. GNSS Multi-Carrier Fast Partial Ambiguity Resolution Strategy Tested with Real BDS/GPS Dual- and Triple-Frequency Observations. GPS Solut. 2015, 19, 5–13. [Google Scholar] [CrossRef]
- Parkins, A. Increasing GNSS RTK Availability with A New Single-Epoch Batch Partial Ambiguity Resolution Algorithm. GPS Solut. 2011, 15, 391–402. [Google Scholar] [CrossRef]
- Wang, J.; Feng, Y. Reliability of Partial Ambiguity Fixing with Multiple GNSS Constellations. J. Geod. 2013, 87, 1–14. [Google Scholar] [CrossRef]
- Yang, C.; Shi, W.; Chen, W. Correlational Inference-Based Adaptive Unscented Kalman Filter with Application in GNSS/IMU-Integrated Navigation. GPS Solut. 2018, 22. [Google Scholar] [CrossRef]
- Li, Z.; Yao, Y.; Wang, J.; Gao, J. Application of Improved Robust Kalman Filter in Data Fusion for PPP/INS Tightly Coupled Positioning System. Metrol. Meas. Syst. 2017, 24, 289–301. [Google Scholar] [CrossRef]
- Wu, D.; Xia, L.; Geng, J. Heading Estimation for Pedestrian Dead Reckoning Based on Robust Adaptive Kalman Filtering. Sensors 2018, 18, 1970. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; He, Y.; Han, J. Simultaneous Locating and Calibrating Pseudolite Navigation System for Autonomous Mobile Robots. In Proceedings of the 5th IEEE International Workshop on Intelligent Data Acquisition and Advanced Computing Systems, Rende, Italy, 21–23 September 2009; pp. 519–524. [Google Scholar]
- Yuan, G.; Gan, X.; Li, Z. Analyze and Research the Integrated Navigation Technique for GPS and Pseudolite. In Proceedings of the Second International Conference on Space Information Technology, Wuhan, China, 10–11 November 2007. [Google Scholar]
- Kandepu, R.; Foss, B.; Imsland, L. Applying the Unscented Kalman Filter for Nonlinear State Estimation. J. Process Control 2008, 18, 753–768. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Situation #1 | Situation #2 | Situation #3 | |
|---|---|---|---|
| PL1-PL6 | 9887 | 949 | 29 |
| PL4-PL6 | 7846 | 2819 | 200 |
| PL5-PL6 | 10014 | 826 | 25 |
| PL8-PL6 | 8255 | 2486 | 124 |
| All DD PLs | 3693 | 6794 | 378 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Huang, G.; Zhang, P.; Zhang, Q. Reliable Indoor Pseudolite Positioning Based on a Robust Estimation and Partial Ambiguity Resolution Method. Sensors 2019, 19, 3692. https://doi.org/10.3390/s19173692
Li X, Huang G, Zhang P, Zhang Q. Reliable Indoor Pseudolite Positioning Based on a Robust Estimation and Partial Ambiguity Resolution Method. Sensors. 2019; 19(17):3692. https://doi.org/10.3390/s19173692
Chicago/Turabian StyleLi, Xin, Guanwen Huang, Peng Zhang, and Qin Zhang. 2019. "Reliable Indoor Pseudolite Positioning Based on a Robust Estimation and Partial Ambiguity Resolution Method" Sensors 19, no. 17: 3692. https://doi.org/10.3390/s19173692
APA StyleLi, X., Huang, G., Zhang, P., & Zhang, Q. (2019). Reliable Indoor Pseudolite Positioning Based on a Robust Estimation and Partial Ambiguity Resolution Method. Sensors, 19(17), 3692. https://doi.org/10.3390/s19173692