1. Introduction
DOA estimation is an important problem in array signal processing, and is widely used in radar, communication, sonar, and other detection equipment [
1,
2,
3,
4,
5,
6]. Traditional subspace-based methods, which include the multiple signal classification (MUSIC) algorithm [
7] and the estimation of signal parameters via rotational invariance techniques (ESPRIT) [
8,
9], have been verified as efficient estimation techniques by using the eigenvalue decomposition of the received covariance matrix. Previous studies focused on the uniform array, such as the uniform linear array, uniform circular array, etc. Many DOA estimation algorithms have been proposed [
10,
11,
12,
13]. However, as the number of array elements and array aperture are restricted in practice, the uniform array is not the optimal array structure. The sparse array has attracted considerable attention because it obtains a larger array aperture without increasing the number of array sensors, thus producing better DOA estimation performance. The earliest sparse array is the minimum redundancy array (MRA). However, MRA cannot obtain the closed form expression, which makes it impossible to apply in practice. Subsequently, Vaidyanathan proposed the nested array and coprime array [
14,
15]. The application of the nested array is restricted by the mutual coupling of array elements. The coprime array is a non-uniform array system whose inter-element spacing is larger than half-wavelength. The coprime array processes spatial signals in a sparser array structure, which results in good angle measurement performance. Compared with the uniform array, it has a larger array aperture when the number of array elements is the same, and fewer array sensors are required when the array aperture is the same. Additionally, the mutual coupling of array elements is reduced, which weakens the influence on the DOA estimation performance.
For the coprime linear array (CLA), two mainstream DOA estimation methods exist: the virtualization array sensor method [
16,
17,
18,
19,
20] and the solving-ambiguity-based method [
21,
22,
23,
24,
25,
26]. In the solving-ambiguity-based method, CLA can be decomposed into two uniform linear subarrays, and then DOA can be achieved according to conventional DOA estimation algorithms [
7,
8,
9]. This method sacrifices some degrees of freedom (DOF), that is to say, it reduces the number of signals that the CLA can detect. By adding a number of array sensors, we can improve the DOF. In addition, the virtualization array sensor method can add DOF by extending the virtual array aperture. However, this method is highly computationally complex and has demanding requirements for snapshots of the received signals, which is difficult in practical engineering applications. In order to achieve a better trade-off between the DOF and practical applications, we mainly studied the solving-ambiguity-based method in this paper.
In the solving-ambiguity-based method, the CLA is first decomposed into two uniform linear subarrays. Since inter-element spacing is larger than half-wavelength, the DOA estimation results are ambiguous. In order to obtain the true DOA, solving ambiguity must be performed. Zhou et al. [
23] proposed a DOA estimation algorithm for CLA by combining the MUSIC of two subarrays for the corresponding coprime array signal processing. They obtained the DOA by searching the closest spectral peaks of two subarrays, but this method has higher computational complexity. In order to reduce the computational complexity, the reference [
24] proposed a partial spectral search DOA estimation method. By using the Root-MUSIC algorithm for CLA, the reference [
25] avoided spectral peak search. In the reference [
26], a fast DOA estimation algorithm was proposed based on the unitary transformation technique, and the complexity was further reduced. The reference [
27] proposed a fast search-free DOA estimation for CLA by using projection processing in the search for optimal DOAs. However, solving modular equations in the reference [
27] required an iterative process, which still has a large computational burden.
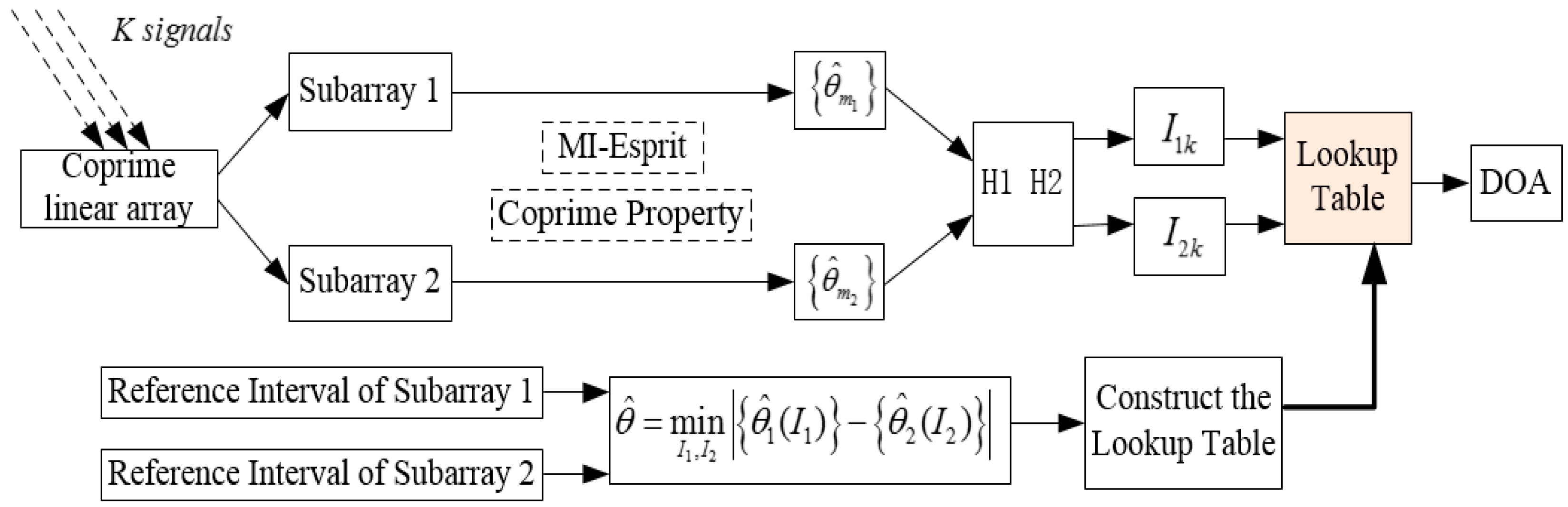
In order to ease the limitations of the existing algorithms, this paper proposes a novel DOA estimation method for CLA based on the MI-ESPRIT and lookup table (LUT). MI-ESPRIT fully uses elements of every subarray, so the angle measurement precision is improved compared with the algorithm proposed by the reference [
28], which was based on the ESPRIT algorithm. In addition, the computational complexity is reduced because the proposed method avoids spectral peak search. After obtaining the DOA estimation results of two subarrays, solving ambiguity faces the problem of traversal searching, and the computational complexity increases in the presence of multiple signals. In engineering applications, the common method of reducing computational complexity is to use the LUT. So, we use the LUT method to solve ambiguity in the CLA. Finally, by using the transformation relationship between the signal subspace of the two subarrays, the matching error among multiple signals is avoided. The proposed method is ultra-high speed, has higher DOA estimation precision, no matching error, and low memory usage, rendering it suitable for engineering applications.
The remainder of this paper is organized as follows:
Section 2 formulates the coprime linear array data model. In
Section 3, the proposed method based on MI-ESPRIT and LUT is outlined in detail.
Section 4 provides the numerical simulations and the proposed algorithm is discussed referring to the simulation results.
Section 5 concludes the paper.
Notations: Throughout this paper, we use lower-case letters and capital letters to represent the vector and matrix, respectively. Superscript , , and denote the inverse, conjugate transpose, and pseudo-inverse operator, respectively. The notation [A]ij represents the (i,j)th element of the matrix A. The symbol E denotes the statistical expectation operator and is the Euclidean norm operator. arcsin(•) denotes the anti-sinusoidal operator and IM stands for the M × M identity matrix. Moreover, we use R(•) to represent the rounding operator.
4. Simulation Analysis
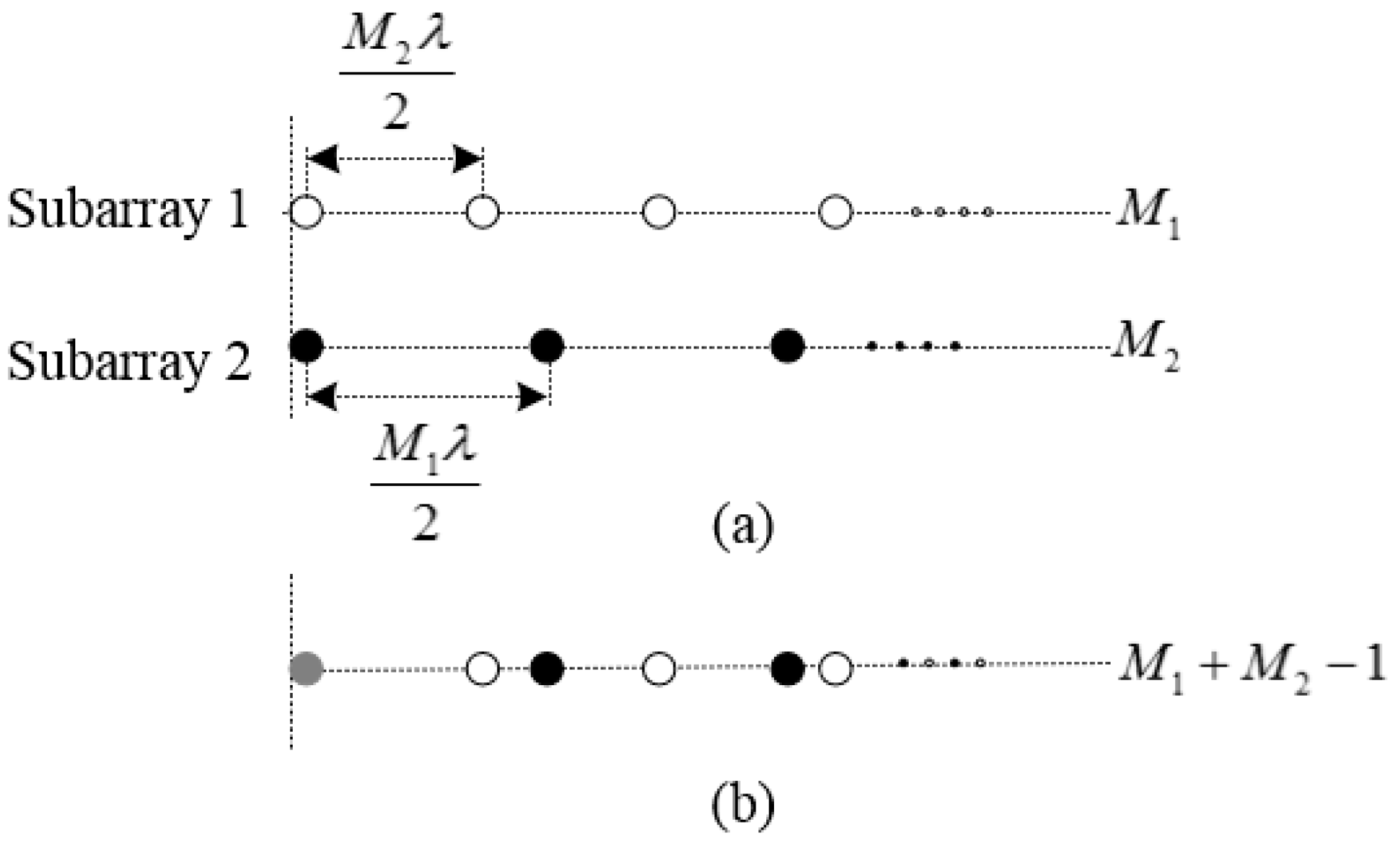
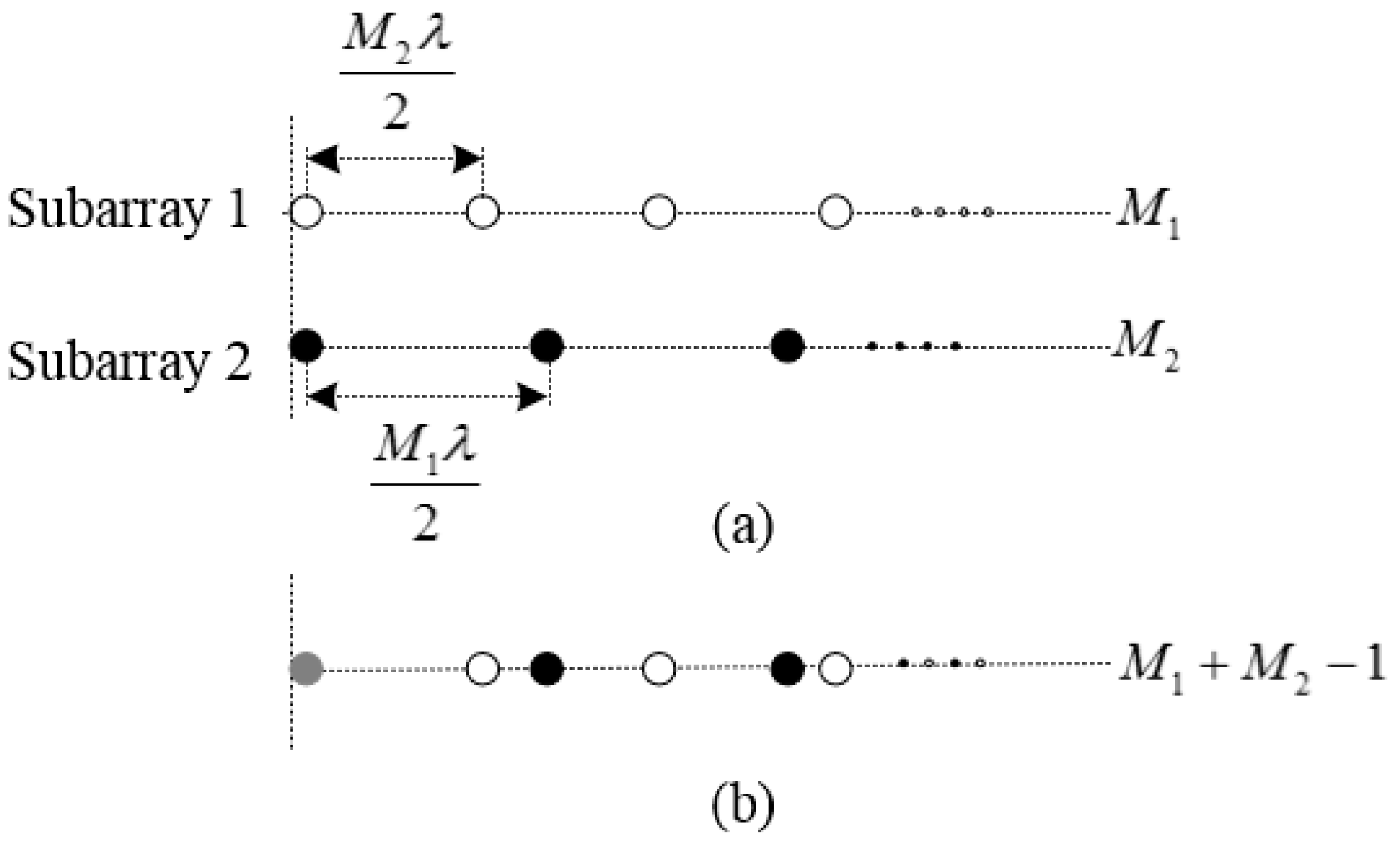
Consider a CLA consisting of two uniform linear subarrays with
and
elements, and inter-element spacing of
and
, respectively. In MI-ESPRIT, we take
, and then the subarray 1 can be divided into
arrays and subarray 2 can be divided into
arrays. Two signals imping on the CLA from −20°, 20°. In order to verify the performance of the proposed algorithm, we performed comparison simulations between the previously proposed methods [
23,
25,
28] and our method. In the reference [
23], the rough step was
dS1 = 0.1° and the fine step was
dS2 = 0.2°. Moreover, in order to illustrate the advantage of CLA, a comparison with the uniform linear array (ULA) was added to the simulation, in which the number of array elements was consistent with the CLA, i.e.,
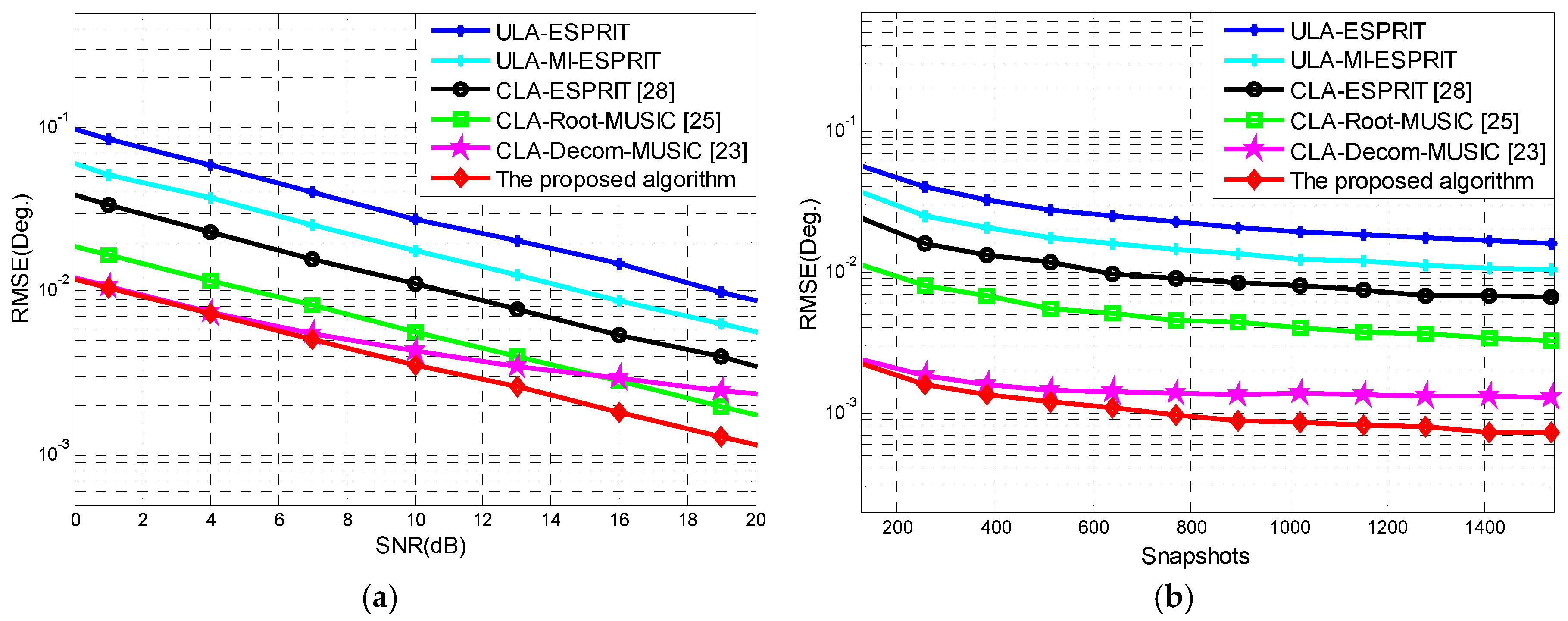
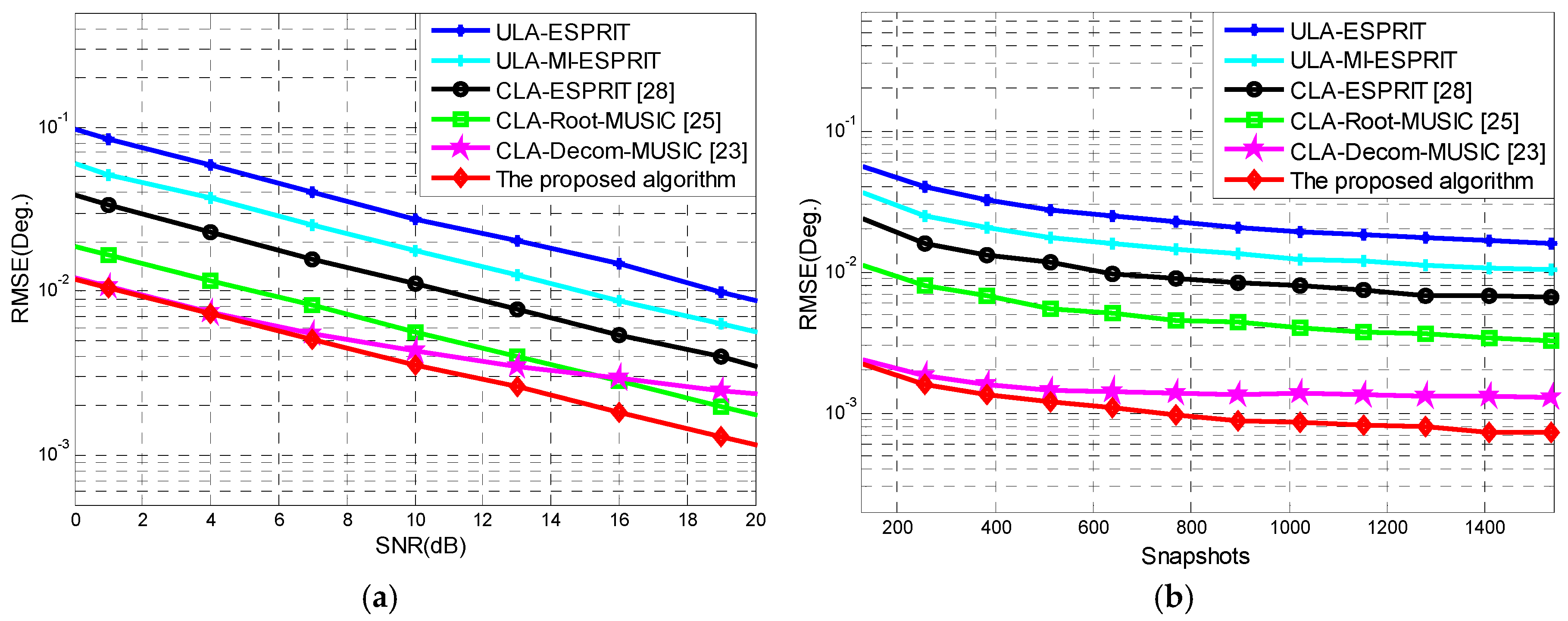
. We performed 1000 independent Monte Carlo simulations. We recorded 512 snapshots and
Figure 5a shows that the DOA estimation root mean square error (RMSE) of the six algorithms varied with the signal-to-noise ratio (SNR). When the
dB, the DOA estimation RMSE of the six algorithms versus snapshots is shown in
Figure 5b.
With increasing SNR or snapshots, the DOA estimation RMSE of the algorithms decreased rapidly. Compared with the ULA, the DOA estimation precision of CLA was significantly better. Compared to both CLA and ULA, the DOA estimation precision of MI-ESPRIT was better than ESPRIT. This is because the MI-ESPRIT algorithm makes full use of the subarray elements, so the angle measurement precision of the proposed algorithm is better than that of the reference [
28], which was based on the ESPRIT algorithm. The DOA estimation precision of the reference [
25] was between that of the reference [
28] and the proposed algorithm. It can be seen from
Figure 5 that the DOA estimation precision of the algorithm introduced by the reference [
23] is basically consistent with our proposed method when SNR is low. With increasing SNR, the DOA estimation precision of the algorithm of the reference [
23] was poor compared to our proposed method. Because the angle measurement accuracy in the reference [
23] is closely related to the precision of the fine spectrum search step
dS2, if we continued to reduce
dS2, the DOA estimation precision of the reference’s algorithm [
23] may be better at high SNR, but the high computational complexity caused by the fine spectrum search would be unfeasible. In summary, the proposed algorithm possesses the best DOA estimation accuracy.
In order to verify the angular resolution of the proposed method, other simulation conditions remained unchanged and the DOAs of two signals were reduced to −10°, 10°; −5°, 5° and −0.5°, 0.5°. The
dB,
dB, and
dB DOA estimation results are shown in
Table 1. It can be seen from
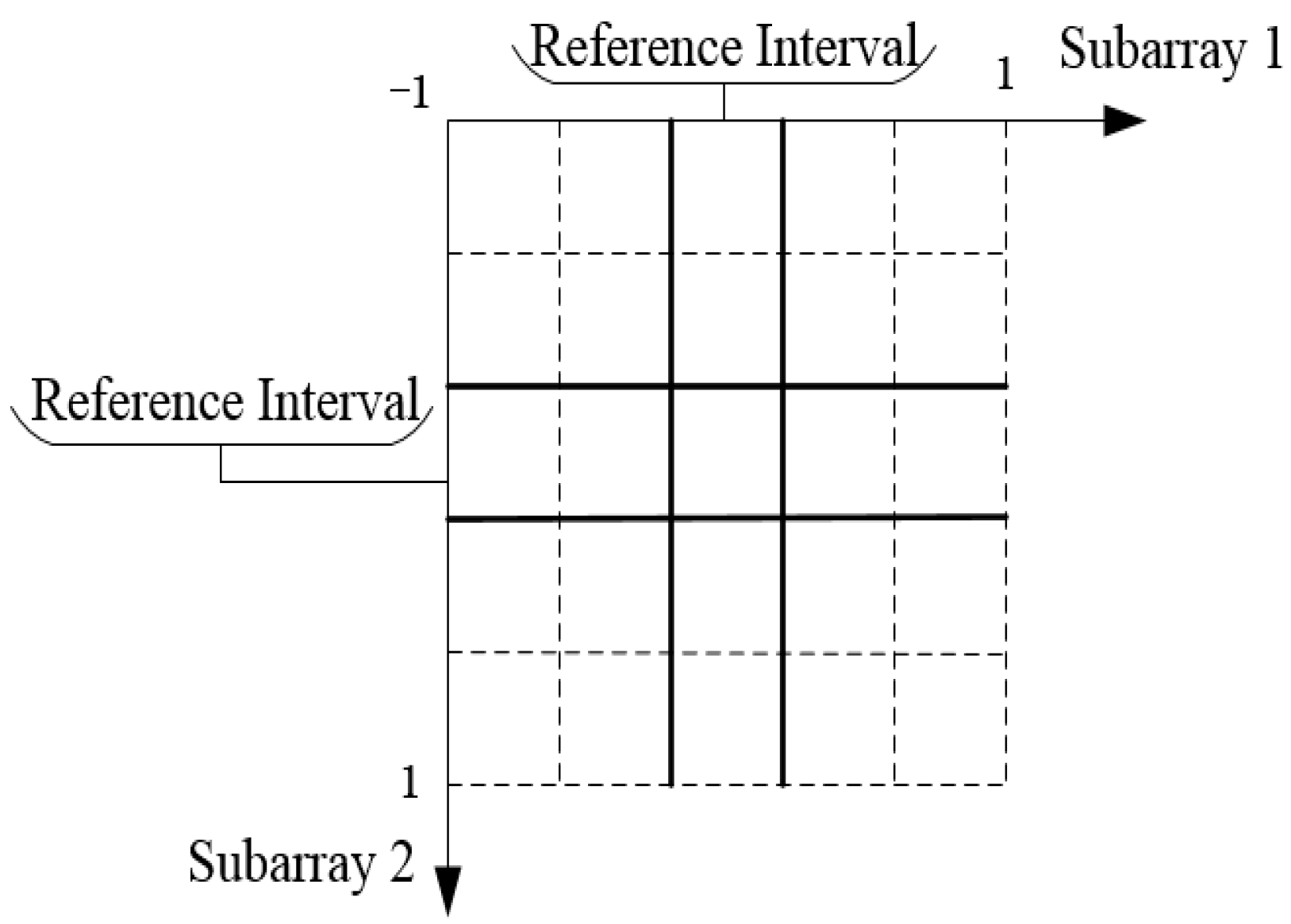
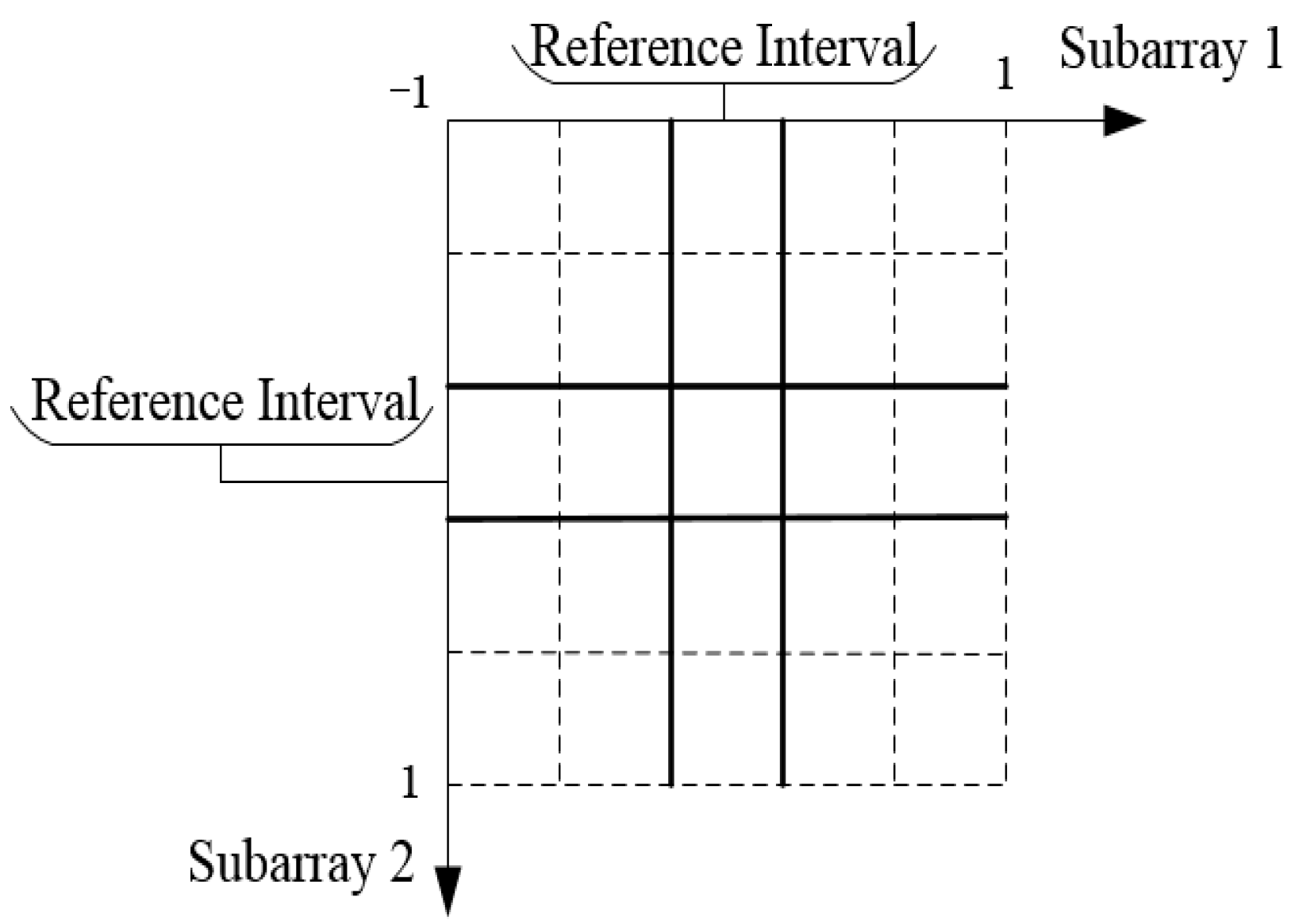
Table 1 that the proposed method could still distinguish two signals, although the DOA spacing was 1°. This is because the MI-ESPRIT algorithm has higher DOA estimation precision. Additionally, in the process of constructing the lookup table, we set the step
in the reference interval, which guarantees high estimation accuracy. Higher DOA estimation precision means higher angular resolution. Therefore, the angular resolution of the proposed method can achieve 1°.
The computational complexity of the various algorithms are analyzed in
Table 2. The CLA consists of two uniform linear subarrays with
and
sensors. Consider that
signals impinge on the CLA and
snapshots are used, and the number of searches in the reference [
23] is set as
. It can be seen from
Table 2 that the computational complexity of each algorithm is mainly created by two parts. The first part obtains the estimated values, which include covariance matrix estimation, eigenvalue decomposition, and solving estimated values, so the computational burden of the four algorithms is different. The second part is the solving ambiguity; the computational complexities in the previously formulated algorithms [
23,
25,
28] are the same, i.e.,
, which is larger than the complexity in our method. In the proposed algorithm, by simply indexing in the LUT, the real DOA can be obtained. In general, the computational burden of the first part is larger than the second part.
In the reference [
23], the computational burden is caused by the spectrum peak search process and
is usually much larger than other variables, so CLA-Decom-MUSIC [
23] has the highest computational complexity. CLA-Root-MUSIC [
25] estimates the covariance matrix and performs the eigenvalue decomposition by combining the two subarrays, which increases the computational complexity, and the polynomial root finding is very time-consuming in practice. Therefore, CLA-Root-MUSIC [
25] also has higher computational complexity, which second to CLA-Decom-MUSIC [
23]. Both CLA-ESPRIT [
28] and our proposed algorithm are essentially based on the ESPRIT algorithm, whose computational complexity is lower than CLA-Decom-MUSIC [
23] and CLA-Root-MUSIC [
25]. For the ESPRIT algorithm, because the computational burden of solving estimated values can be ignored, its computational burden of the first part mainly includes covariance matrix estimation and eigenvalue decomposition of both the covariance matrix
and matrix
, and the corresponding complexities are
,
and
, respectively. The MI-ESPRIT algorithm uses the multiple invariance structure of ESPRIT, which only adds the linear transformation of the matrix compared to ESPRIT. The added computational burden can also be neglected. Therefore, the proposed algorithm has approximately similar computational complexity in terms of the first part compared with CLA-ESPRIT [
28]. However, we simplified the solving ambiguity by using a LUT, which substantially reduces the computational burden, i.e.,
. Therefore, the proposed algorithm is more efficient.
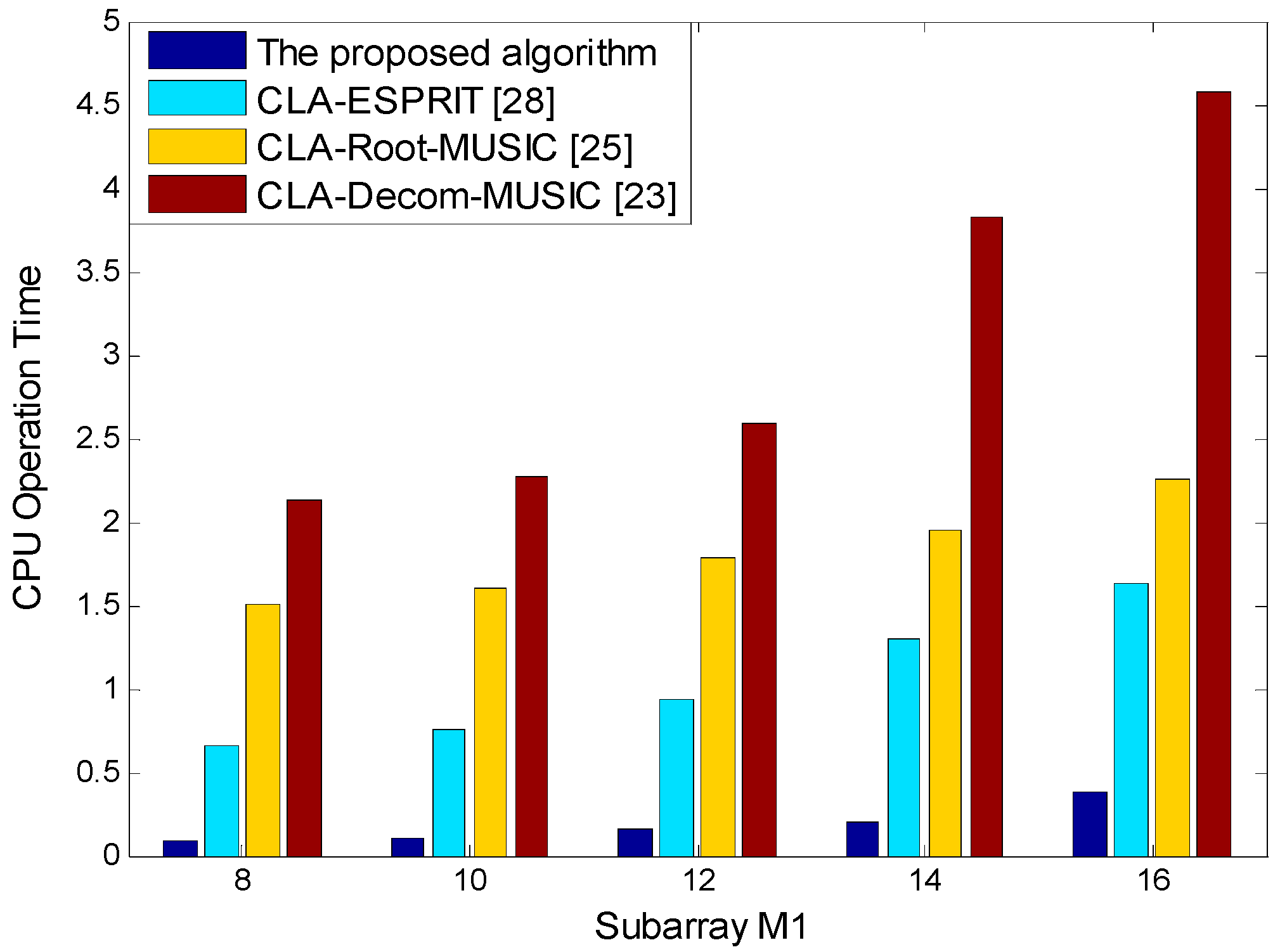
According to the above simulation conditions,
remains unchanged and
is 8, 10, 12, 14, and 16. We compared the processing time of the four different algorithms in
Figure 6. The processing time was determined by a PC (Lenovo manufactory, Beijing, China) with AMD Phenom™ IIX6 1055T Processor 2.8 GHz CPU and 8 GB RAM by running the MATLAB codes in the same environment. It can be seen from
Figure 6 that the proposed algorithm has the highest computational efficiency.
5. Conclusions
CLA has been widely studied due to its superior DOA estimation performance. This paper proposed a novel DOA estimation algorithm for CLA based on MI-ESPRIT and LUT. MI-ESPRIT fully uses the subarray’s elements, which improves the angle measurement accuracy. Then, according to the property of the CLA, the phase ambiguity was solved using the LUT, which reduced the computational complexity. At the same time, using the relationship between the signal subspace of two subarrays, matching errors were avoided when in the presence of multiple signals. Compared with the existing algorithms, the proposed method not only has higher DOA estimation accuracy, but also has lower computational complexity. Additionally, our DOA estimation method, which is based on the LUT, has broad application prospects in practice. However, in our study, the coprime array achieved DOA estimation by decomposing CLA into two uniform linear subarrays, which sacrifices the degrees of freedom, i.e., a reduction in the number of sources that the CLA can resolve. By increasing the number of CLA sensors, we could obtain increased DOFs. In addition, the virtualization array sensor method, using the Khatri-Rao transformation, could also be applied to the CLA to yields the virtual array structure. Based on the extended virtual array aperture, the DOFs can also be increased. Therefore, future research efforts will aim to improve the DOF of CLA.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}