1. Introduction
Since the concept of multiple-input and multiple-output (MIMO) radar has been proposed in recent years, it has drawn a great attention of scholars in the field of radar research [
1,
2]. Since the MIMO radar transmits the orthogonal waveform and has different arrangement of transmit-receive array, MIMO radar can obtain both spatial diversity and waveform diversity at the same time [
3]. For angle estimation, MIMO radar has better parameter estimation performance than the conventional phased array radar, especially for the estimation of joint direction-of-departure (DOD) and direction-of-arrival (DOA) [
4]. The study of MIMO radar is mainly divided into two categories: (1) statistical MIMO radar [
5,
6], which can obtain the spatial diversity gain of both transmit and receive arrays for improving the detection and parameter estimation performance; and (2) collocated MIMO radar [
7], which uses the orthogonality of the transmitted waveforms to form a large virtual array aperture for obtaining the corresponding waveform diversity gain. Thus, in the latter, the degrees of freedom (DOFs) are raised and the aperture of MIMO radar is enlarged. This literature focuses on the research of collocated MIMO radar.
In bistatic MIMO radar, the estimation of joint DOD and DOA is an important problem, and many popular algorithms have been proposed for this issue. Yan et al. [
8] proposed the Capon method, and Gao et al. [
9] proposed the multiple signal classification (MUSIC) method. These two methods belong to the spatial spectral method. A spatial spectral function is firstly constructed and then the angles can be estimated from the spatial spectrum. The advantage of the spatial spectrum methods is that they can realize the automatic matching between the DOD and DOA, and the accuracy of angle estimation is high. The disadvantage is that the computational complexity is large due to the two-dimensional spatial spectral searching. To remove the process of the spatial spectral searching, the estimation method of signal parameter via rotational invariance techniques (ESPRIT) is utilized to estimate the angles of targets in MIMO radar [
10]. This method achieves the rotation invariance features for estimating DOD and DOA by dividing the virtual array into different subarrays, but this method cannot realize the automatic pairing between the transmit and receive angles. Then, the automatically-paired ESPRIT method is proposed in [
11]. In Reference [
12], the calculation procedure of ESPRIT algorithm is transformed into the real-valued domain by using unitary transformation, which reduces the computational complexity of ESPRIT algorithm without the performance loss. However, the algorithms mentioned above rely on the ideal transmit and receive arrays. Since the receive and transmit arrays cannot be accurately compensated, there exists the mutual coupling between the array elements [
13]. In view of the mutual coupling of receive and transmit array elements in MIMO radar, several methods are proposed, such as MUSIC-like and ESPRIT-like algorithms [
14,
15]. The ESPRIT-like algorithm [
14] utilizes the banded symmetric Toeplitz structure of the mutual coupling matrix in the uniform linear array to remove the effect of unknown mutual coupling, but it leads the loss of array aperture. Using inherent characteristics of the signals is considered as a possible way to compensate the aperture loss. Fortunately, the strictly noncircular signals, such as binary phase shift keying (BPSK) and M-ary amplitude shift keying (MASK), have been widely used in the field of communication and radar systems for aperture extension [
16,
17]. In view of using the noncircular characteristic of signal to improve the accuracy of DOA estimation, many algorithms have been developed [
18,
19,
20]. The robust DOA estimation method with the unknown mutual coupling is investigated in [
18], which takes the noncircular characteristic of the signal into account for eliminating the influence of mutual coupling. Then, the loss of array aperture is partly compensated by using the noncircular structure of these signals. On the other hand, all algorithms mentioned above need to stack the received data into a special structure matrix, which ignores the inherence multidimensional structure of signal. To utilize the inherent multidimensional structure of the signals, many methods have been developed [
21,
22,
23,
24,
25]. A multi-SVD algorithm is developed to estimate DOD and DOA in MIMO radar [
21], and the estimation performance is improved remarkably. Considering the mutual coupling in transmit and receive arrays, the subspace estimation method based on unitary tensor decomposition is introduced in [
23]. The algorithm converts the tensor subspace into a new real-valued tensor through using the unitary transformation while eliminating the influence of mutual coupling. Then, the estimation of DOD and DOA is obtained by using tensor-based subspace, and it can achieve better angle estimation accuracy with lower computational burden. In addition, the DODs and DOAs can be estimated in the coexistence of mutual coupling and spatial colored noise [
25]. According to the above analysis, these algorithms only utilize the noncircularity and inherent multidimensional structure of strictly noncircular signals separately in the case of unknown mutual coupling.
In this paper, we develop a tensor-based angle estimation scheme for strictly noncircular sources in the presence of unknown mutual coupling in bistatic MIMO radar. This method not only takes the multidimensional structure of the signals into account, but also uses the noncircular characteristics of the signals. Firstly, the proposed method uses the band symmetric Toeplitz structure of mutual coupling matrix to remove the influence of unknown mutual coupling. Then, a novel augmented tensor is constructed to utilize both the noncircularity and inherent multidimensional structure of strictly noncircular signals. Afterwards, the higher order SVD (HOSVD) technique of tensor decomposition is utilized to formulate a tensor-based signal subspace. Finally, the estimation of DODs and DOAs are obtained by utilizing the rotational invariance technique, where the DODs and DOAs are matched automatically. Due to the exploitation of inherent multidimensional structure and enlarged array aperture, the proposed method has better angle estimation performance than other algorithms in the presence of mutual coupling. The experiment results are carried out to prove the advantages of the proposed method.
The summary is as follows.
Section 2 gives some basic concepts of tensor and the tensor-based signal model. The proposed method is developed in
Section 3.
Section 4 discusses the comments and specific analysis of the proposed method. Simulation results are given in
Section 5. The conclusion of the proposed algorithm is given in
Section 6.
Notation: , , and indicate conjugate-transpose, transpose, inverse, and conjugate, respectively. and represent the Kronecker product and Khatri–Rao product, respectively. is the diagonalization operation, and means the symmetric Toeplitz matrix constructed by the vector . indicates the vectorization operation. represents the phase of , denotes a identity matrix, is the zero matrix, and represents a matrix with ones on its anti-diagonal and zeros elsewhere.
5. Simulation Results
In this part, some numerical experiments are carried out to prove that the proposed algorithm has superior angle estimation performance. ESPRIT-like algorithm [
14], Tensor unitary ESPRIT algorithm [
23] and Cramer–Rao bound (CRB) [
14] were compared with the proposed method. In these simulations, the bistatic MIMO radar is made up of
transmit antennas and
receive antennas, both of which are composed of half-wavelength spaced uniform linear arrays (ULAs). Unless stated otherwise, it was assumed that there are
uncorrelated targets, located at
,
and
. The root mean square error (RMSE) was utilized to achieve the evaluation of angle estimation performance, which is expressed as
where
and
are the estimation of DOD
and DOA
for the
ith Monte Carlo trial, respectively. the total number of Monte Carlo trials was assumed as
, and
was used in the following simulations. The other parameter is the probability of the successful detection (PSD) expressed as
, where
represents the total number of successful times and a successful trial requires the absolute error of all the experiment results are smaller than
. For the mutual coupling parameters, there are two cases: (1)
with
and
; and (2)
with
and
.
In the first simulation, we investigated the estimation results of the proposed method, and the SNR versus RMSE in two different situations (
Figure 1,
Figure 2 and
Figure 3). The number of snapshots is
.
Figure 1 shows the estimation results of the proposed algorithm with SNR = 0 dB in Case (1). We can clearly see that DODs and DOAs were correctly identified and matched accurately, which verifies the validity of the proposed algorithm.
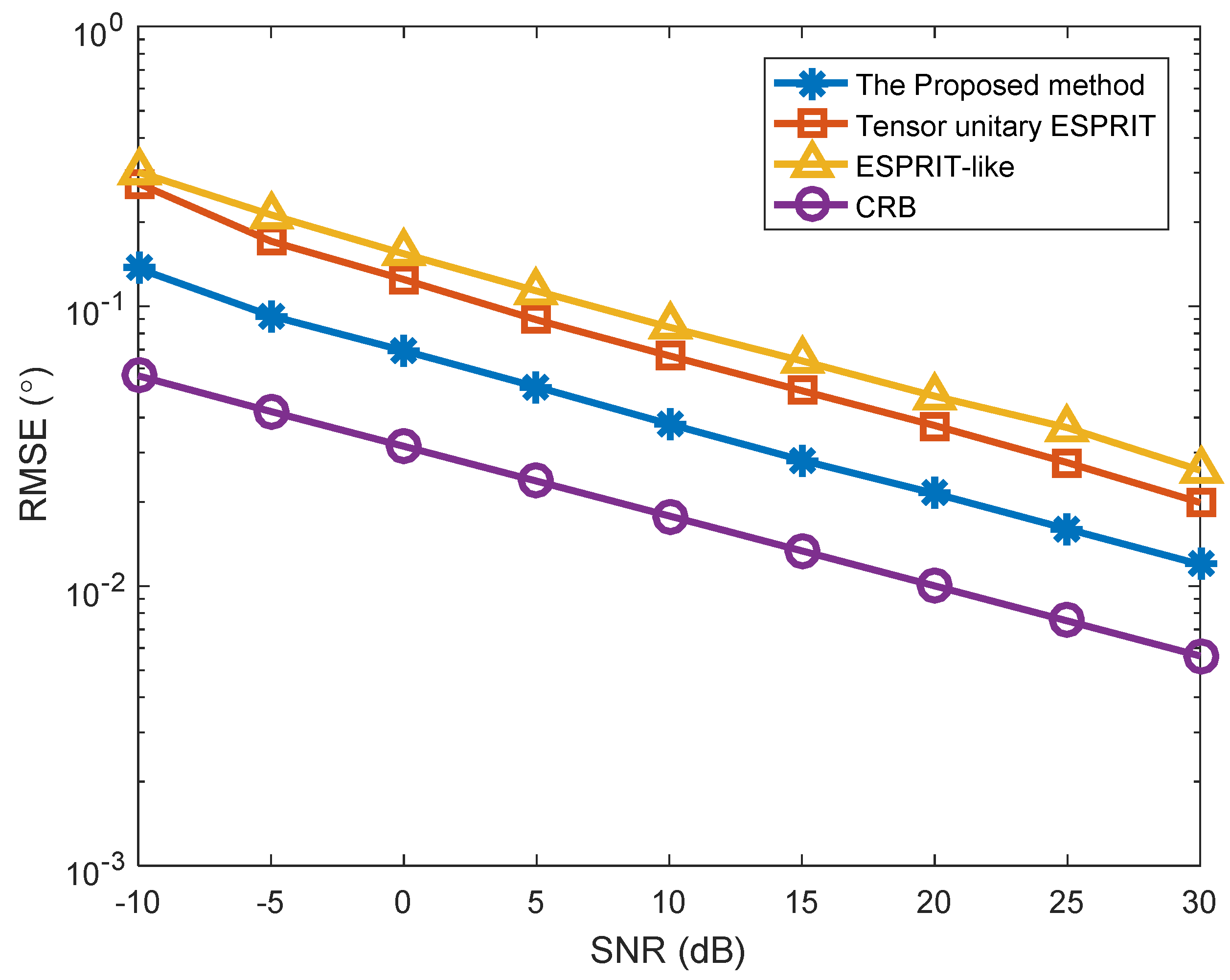
Figure 2 depicts the RMSE versus SNR with different methods in Case (1). At the same time,
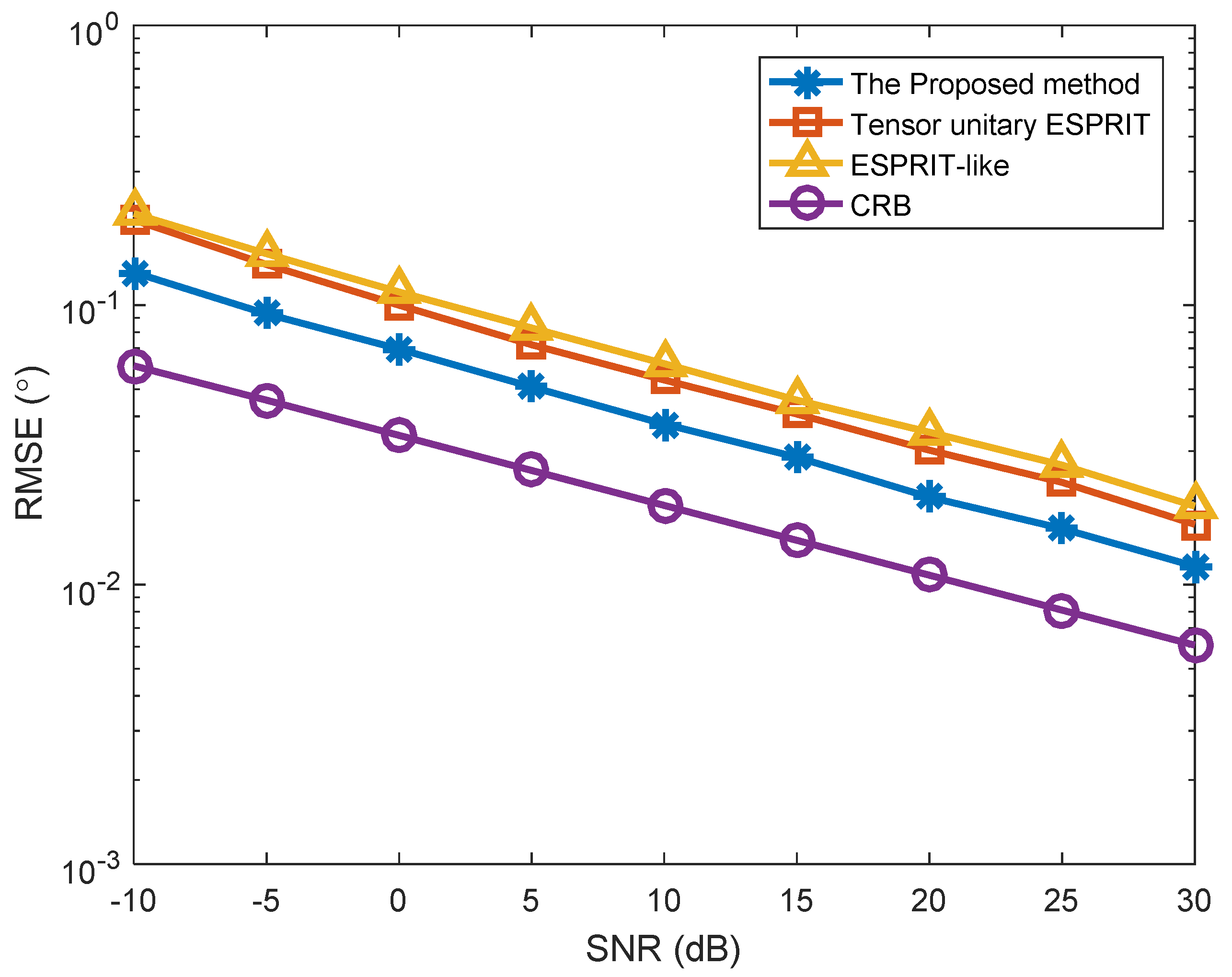
Figure 3 depicts the RMSE versus SNR in Case (2). In
Figure 2, the angle estimation performance of the proposed method is clearly superior to the Tensor unitary ESPRIT algorithm and the ESPRIT-like algorithm, and the performance of the proposed algorithm is close to the Cramer–Rao bound (CRB). That is because the proposed method not uses the multidimensional structure of the signal, but also utilizes the noncircularity characteristics. Other methods only consider the noncircular structure or tensor multidimensional structure. In addition, the performance of the Tensor unitary ESPRIT method is better than the ESPRIT-like method, because the Tensor unitary ESPRIT method considers the multidimensional structure of the signal and obtains superior estimation performance with unknown mutual coupling. Similar conclusions can be achieved from
Figure 3, which means that the proposed method can obtain superior performance in both cases.
In the second simulation, we analyzed the angle estimation performance of different algorithms in the presence of
targets, where the two targets are located at
and
. The number of snapshots was
and the mutual coupling in
Figure 4 is set as Case (1). At the same time,
Figure 5 depicts the RMSE versus SNR in Case (2).
Figure 4 depicts the RMSE versus SNR with different algorithms for two targets. In
Figure 4, the performance of our proposed method is still superior to that of Tensor unitary ESPRIT method and ESPRIT-like method. In addition, the estimation performance of Tensor unitary ESPRIT method is superior to that of ESPRIT-like method. Similar conclusions can be achieved from
Figure 5, which means that the proposed method can obtain superior performance in both cases.
The third simulation indicates the RMSE versus SNR of different transmit–receive array configurations for
targets in Case (1). As shown in
Figure 6, the angle estimation performance of all the three algorithms improved with the increasing of the elements of transmit and receive arrays, in which the configuration of transmit–receive array is
and
, respectively. The main reason is that more spatial diversity gain of MIMO radar was obtained with more transmit and receive arrays. Finally, the spatial resolution of the proposed method is improved.
The fourth simulation describes the RMSE versus snapshots of different algorithms for
targets, where SNR = 0 dB and the mutual coupling is set as Case (1). In
Figure 7, the performance of all algorithms improved with more snapshots. The performance of our proposed algorithm is superior to that of several other methods in general, but the performance of the Tensor unitary ESPRIT method is slightly better than the proposed method under very low snapshots, which is because the Tensor unitary ESPRIT method increases the number of snapshots effectively by spatial smoothing. When the number of snapshots is greater than a specific threshold, the performance of the proposed method is superior to that of Tensor unitary ESPRIT method and ESPRIT-like method, and is very close to CRB. In addition, the performance of the Tensor unitary ESPRIT method is close to the performance of the ESPRIT-like method under the condition of large snapshot number, but it is still inferior to the proposed method.
The fifth simulation depicts the probability of successful detection of several algorithms versus SNR for
targets, where the number of snapshots was
and the mutual coupling is set as Case (1). In
Figure 8, all algorithms can achieve 100% accuracy at high SNR region, but the accuracy of the proposed method can reach 100% faster at certain SNR. In other words, in the same case of SNR, the proposed algorithm has a higher PSD than other algorithms. That is mainly because the proposed algorithm can reasonably utilize the noncircular characteristics and multidimensional structure characteristics of signals to promote the performance of angle estimation.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







