A Novel Nested Configuration Based on the Difference and Sum Co-Array Concept


Abstract
:1. Introduction
2. Review of the VCAM Algorithm
3. The Diff-Sum Nested Array Based on the Concept of the Difference and Sum Co-Array
3.1. The Properties of the DSCa of the NA
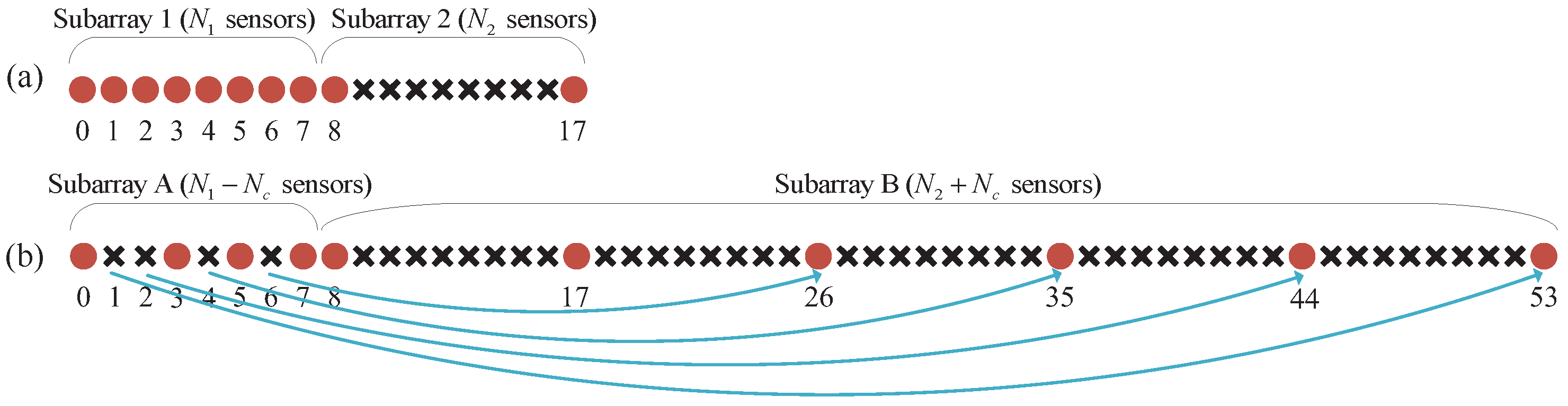
3.2. The Proposed Diff-Sum Nested Array
4. Simulation Results
4.1. DOF Comparison
4.2. DOA Estimation
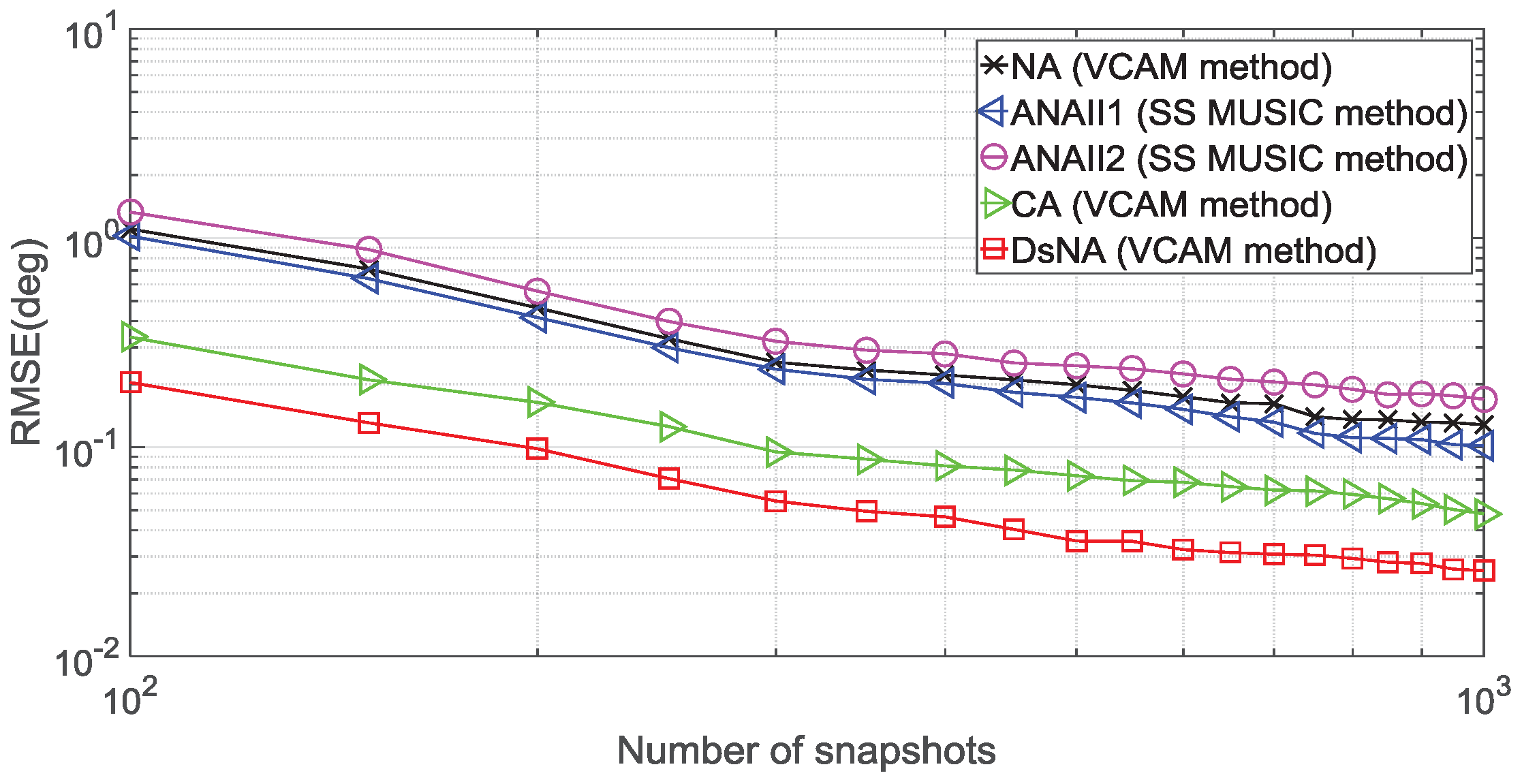
4.3. Root Mean Square Error (RMSE)
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| DSCa | difference and sum co-array |
| DOF | degree of freedom |
| NA | nested array |
| DsNA | diff-sum nested array |
| ULA | uniform linear array |
| DOA | direction of arrival |
| DCa | difference co-array |
| CA | coprime array |
| ANA | augmented nested array |
| VCAM | Vectorized Conjugate Augmented MUSIC |
| SS MUSIC | spatial smoothing based MUSIC |
| KR | Khatri–Rao |
| RMSE | root mean square error |
Appendix A
Appendix B
Appendix C
References
- Krim, H.; Viberg, M. Two decades of array signal processing research: The parametric approach. IEEE Signal Process. Mag. 1996, 13, 67–94. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, Y.; Lu, Y.; Wang, W. DOA estimation based on multi-resolution difference co-array perspective. Digit. Signal Process. 2017, 62, 187–196. [Google Scholar] [CrossRef]
- Wang, X.; Chen, Z.; Ren, S.; Cao, S. DOA estimation based on the difference and sum coarray for coprime arrays. Digit. Signal Process. 2017, 69, 22–31. [Google Scholar] [CrossRef]
- Qin, S.; Zhang, Y.D.; Amin, M.G. DOA estimation of mixed coherent and uncorrelated targets exploiting coprime MIMO radar. Digit. Signal Process. 2017, 61, 26–34. [Google Scholar] [CrossRef]
- Sun, F.; Wu, Q.; Sun, Y.; Ding, G.; Lan, P. An iterative approach for sparse direction-of-arrival estimation in co-prime arrays with off-grid targets. Digit. Signal Process. 2017, 61, 35–42. [Google Scholar] [CrossRef]
- Harry, L.; Trees, V. Optimum Array Processing: Part IV of Detection, Estimation, and Modulation Theory; John Wiler & Sons: New York, NY, USA, 2002. [Google Scholar]
- Cui, C.; Xu, J.; Gui, R.; Wang, W.Q.; Wu, W. Search-Free DOD, DOA and Range Estimation for Bistatic FDA-MIMO Radar. IEEE Access 2018, 6, 15431–15445. [Google Scholar] [CrossRef]
- Yang, M.; Haimovich, A.M.; Yuan, X.; Sun, L.; Chen, B. A Unified Array Geometry Composed of Multiple Identical Subarrays With Hole-Free Difference Coarrays for Underdetermined DOA Estimation. IEEE Access 2018, 6, 14238–14254. [Google Scholar] [CrossRef]
- Si, W.; Peng, Z.; Hou, C.; Zeng, F. Two-Dimensional DOA Estimation for Three-Parallel Nested Subarrays via Sparse Representation. Sensors 2018, 18, 1861. [Google Scholar] [CrossRef] [PubMed]
- Sun, F.; Lan, P.; Zhang, G. Reduced Dimension Based Two-Dimensional DOA Estimation with Full DOFs for Generalized Co-Prime Planar Arrays. Sensors 2018, 18, 1725. [Google Scholar] [CrossRef] [PubMed]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef]
- Pal, P.; Vaidyanathan, P. Nested arrays: A novel approach to array processing with enhanced degrees of freedom. IEEE Trans. Signal Process. 2010, 58, 4167–4181. [Google Scholar] [CrossRef]
- Abramovich, Y.I.; Gray, D.A.; Gorokhov, A.Y.; Spencer, N.K. Positive-definite Toeplitz completion in DOA estimation for nonuniform linear antenna arrays. I. Fully augmentable arrays. IEEE Trans. Signal Process. 1998, 46, 2458–2471. [Google Scholar] [CrossRef]
- Abramovich, Y.I.; Spencer, N.K.; Gorokhov, A.Y. Positive-definite Toeplitz completion in DOA estimation for nonuniform linear antenna arrays. II. Partially augmentable arrays. IEEE Trans. Signal Process. 1999, 47, 1502–1521. [Google Scholar] [CrossRef]
- Pillai, S.; Haber, F. Statistical analysis of a high resolution spatial spectrum estimator utilizing an augmented covariance matrix. IEEE Trans. Acoust. Speech Signal Process. 1987, 35, 1517–1523. [Google Scholar] [CrossRef]
- Song, J.; Shen, F. Improved Coarray Interpolation Algorithms with Additional Orthogonal Constraint for Cyclostationary Signals. Sensors 2018, 18, 219. [Google Scholar] [CrossRef] [PubMed]
- Guo, M.; Chen, T.; Wang, B. An Improved DOA Estimation Approach Using Coarray Interpolation and Matrix Denoising. Sensors 2017, 17, 1140. [Google Scholar] [CrossRef] [PubMed]
- Vaidyanathan, P.; Pal, P. Sparse sensing with co-prime samplers and arrays. IEEE Trans. Signal Process. 2011, 59, 573–586. [Google Scholar] [CrossRef]
- Pal, P.; Vaidyanathan, P. Coprime sampling and the MUSIC algorithm. In Proceedings of the 2011 Digital Signal Processing Workshop and IEEE Signal Processing Education Workshop (DSP/SPE), Sedona, AZ, USA, 4–7 January 2011; pp. 289–294. [Google Scholar]
- Ren, S.; Wang, W.; Chen, Z. DOA estimation exploiting unified coprime array with multi-period subarrays. In Proceedings of the 2016 CIE International Conference on Radar (RADAR), Guangzhou, China, 10–13 October 2016; pp. 1–4. [Google Scholar]
- Wang, W.; Ren, S.; Chen, Z. Unified coprime array with multi-period subarrays for direction-of-arrival estimation. Digit. Signal Process. 2018, 74, 30–42. [Google Scholar] [CrossRef]
- Qin, S.; Zhang, Y.; Amin, M. Generalized coprime array configurations for direction-of-arrival estimation. IEEE Trans. Signal Process. 2015, 63, 1377–1390. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, Y.; Lu, Y.; Ren, S.; Cao, S. Augmented Nested Arrays With Enhanced DOF and Reduced Mutual Coupling. IEEE Trans. Signal Process. 2017, 65, 5549–5563. [Google Scholar] [CrossRef]
- Chen, Z.; Ren, S.; Wang, W. DOA estimation exploiting extended co-array of coprime array. In Proceedings of the 2016 CIE International Conference on Radar (RADAR), Guangzhou, China, 10–13 October 2016; pp. 1–4. [Google Scholar]
- BouDaher, E.; Ahmad, F.; Amin, M.G. Sparsity-Based Direction Finding of Coherent and Uncorrelated Targets Using Active Nonuniform Arrays. IEEE Signal Process. Lett. 2015, 22, 1628–1632. [Google Scholar] [CrossRef]
- Chen, Z.; Ding, Y.; Ren, S.; Chen, Z. A Novel Noncircular MUSIC Algorithm Based on the Concept of the Difference and Sum Coarray. Sensors 2018, 18, 344. [Google Scholar] [CrossRef] [PubMed]
- Skolnik, M.I. Introduction to Radar Systems, 3rd ed.; McGraw-Hill: New York, NY, USA, 2001. [Google Scholar]
- Mahafza, B.R. Introduction to Radar Analysis; Chapman and Hall/CRC: New York, NY, USA, 2017. [Google Scholar]
- Richards, M.A. Fundamentals of Radar Signal Processing; Tata McGraw-Hill Education: New York, NY, USA, 2005. [Google Scholar]
- Adhikari, K.; Buck, J.R.; Wage, K.E. Extending coprime sensor arrays to achieve the peak side lobe height of a full uniform linear array. EURASIP J. Adv. Signal Process. 2014, 2014, 148. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hole Location | Dual Pair | ||
|---|---|---|---|
| 5 | |||
| 6 | |||
| 7 | |||
| 8 | |||
| 10 | |||
| 11 | |||
| 12 | |||
| 13 |
| R | Optimal , | |
|---|---|---|
| odd (≥11) | ||
| odd (<11) | ||
| even (≥10) | ||
| 8 | 29 | |
| 6 | 15 |
| Virtual Array | Approximate |
|---|---|
| DCa(ANAII1) | |
| DCa(ANAII2) | |
| DSCa(NA) | |
| DSCa(CA) | |
| DSCa(DsNA) |
| Virtual Array | |||
|---|---|---|---|
| DSCa (NA) | 34 | 674 | 2114 |
| DCa (ANAII1) | 36 | 848 | 2728 |
| DCa (ANAII2) | 32 | 832 | 2700 |
| DSCa (CA) | 40 | 700 | 2160 |
| DSCa (DsNA) | 53 | 1273 | 4093 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Z.; Ding, Y.; Ren, S.; Chen, Z. A Novel Nested Configuration Based on the Difference and Sum Co-Array Concept. Sensors 2018, 18, 2988. https://doi.org/10.3390/s18092988
Chen Z, Ding Y, Ren S, Chen Z. A Novel Nested Configuration Based on the Difference and Sum Co-Array Concept. Sensors. 2018; 18(9):2988. https://doi.org/10.3390/s18092988
Chicago/Turabian StyleChen, Zhenhong, Yingtao Ding, Shiwei Ren, and Zhiming Chen. 2018. "A Novel Nested Configuration Based on the Difference and Sum Co-Array Concept" Sensors 18, no. 9: 2988. https://doi.org/10.3390/s18092988
APA StyleChen, Z., Ding, Y., Ren, S., & Chen, Z. (2018). A Novel Nested Configuration Based on the Difference and Sum Co-Array Concept. Sensors, 18(9), 2988. https://doi.org/10.3390/s18092988