Investigation of a Three-Dimensional Micro-Scale Sensing System Based on a Tapered Self-Assembly Four-Cores Fiber Bragg Grating Probe

 ,
,
Abstract
:1. Introduction
2. Sensing Principle
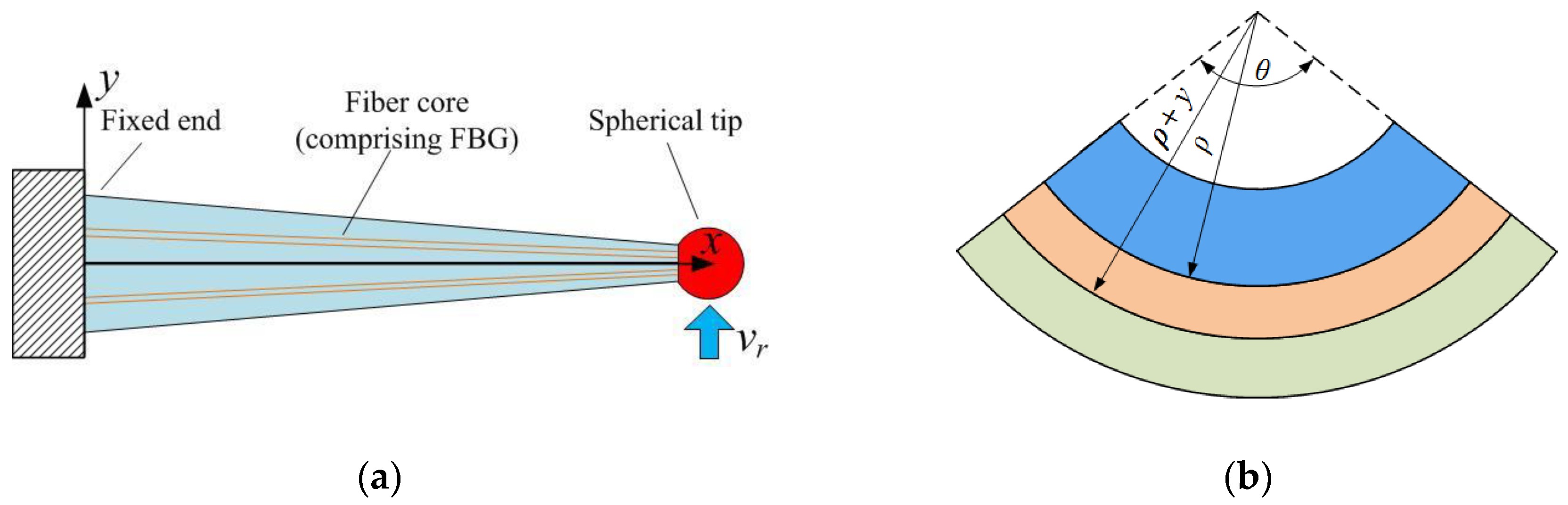
2.1. Sensing Principle of the Radial Displacement
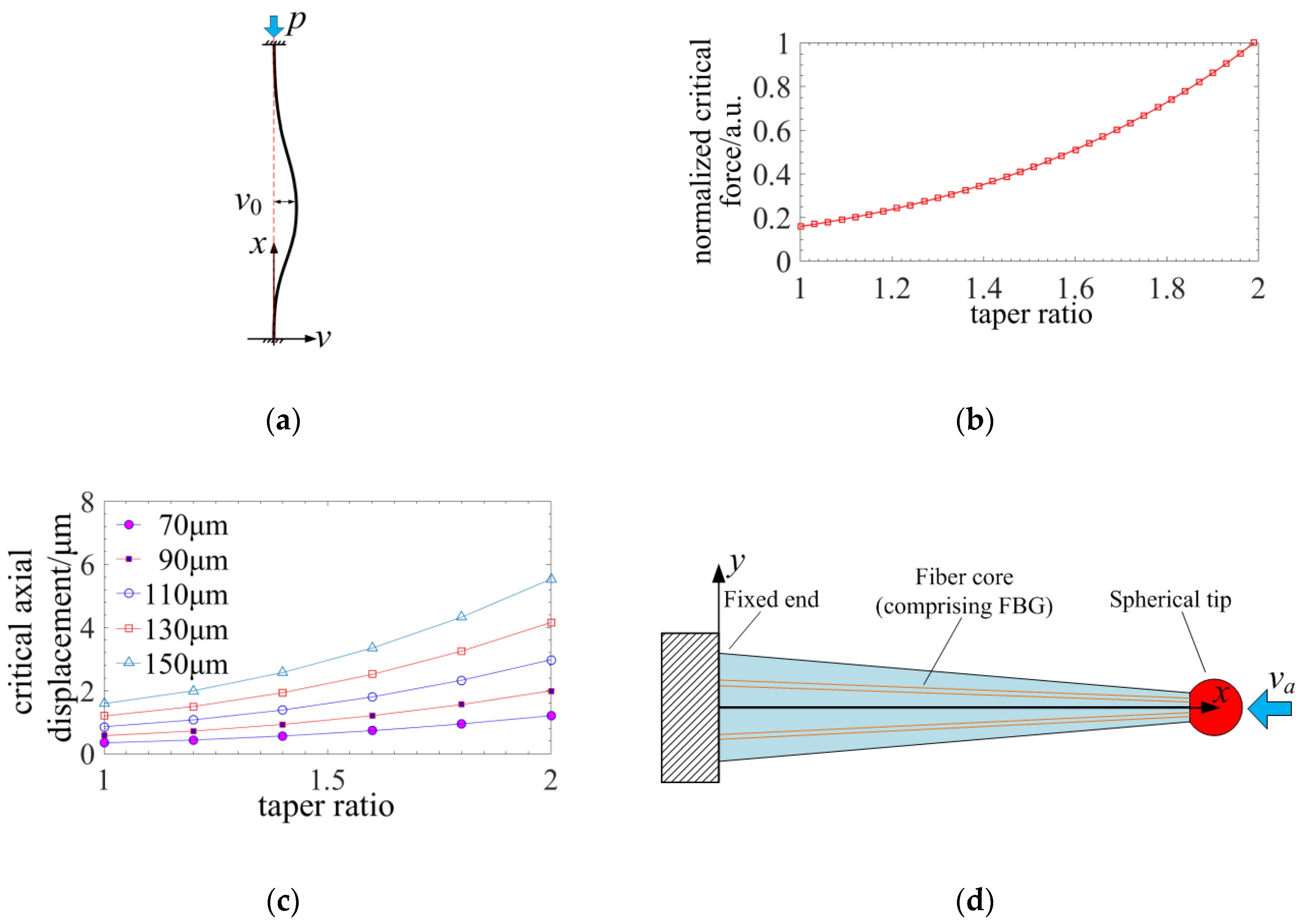
2.2. Sensing Principle of the Axial Displacement
2.3. Sensing Characteristics of the Tapered Four-Cores FBG Probe
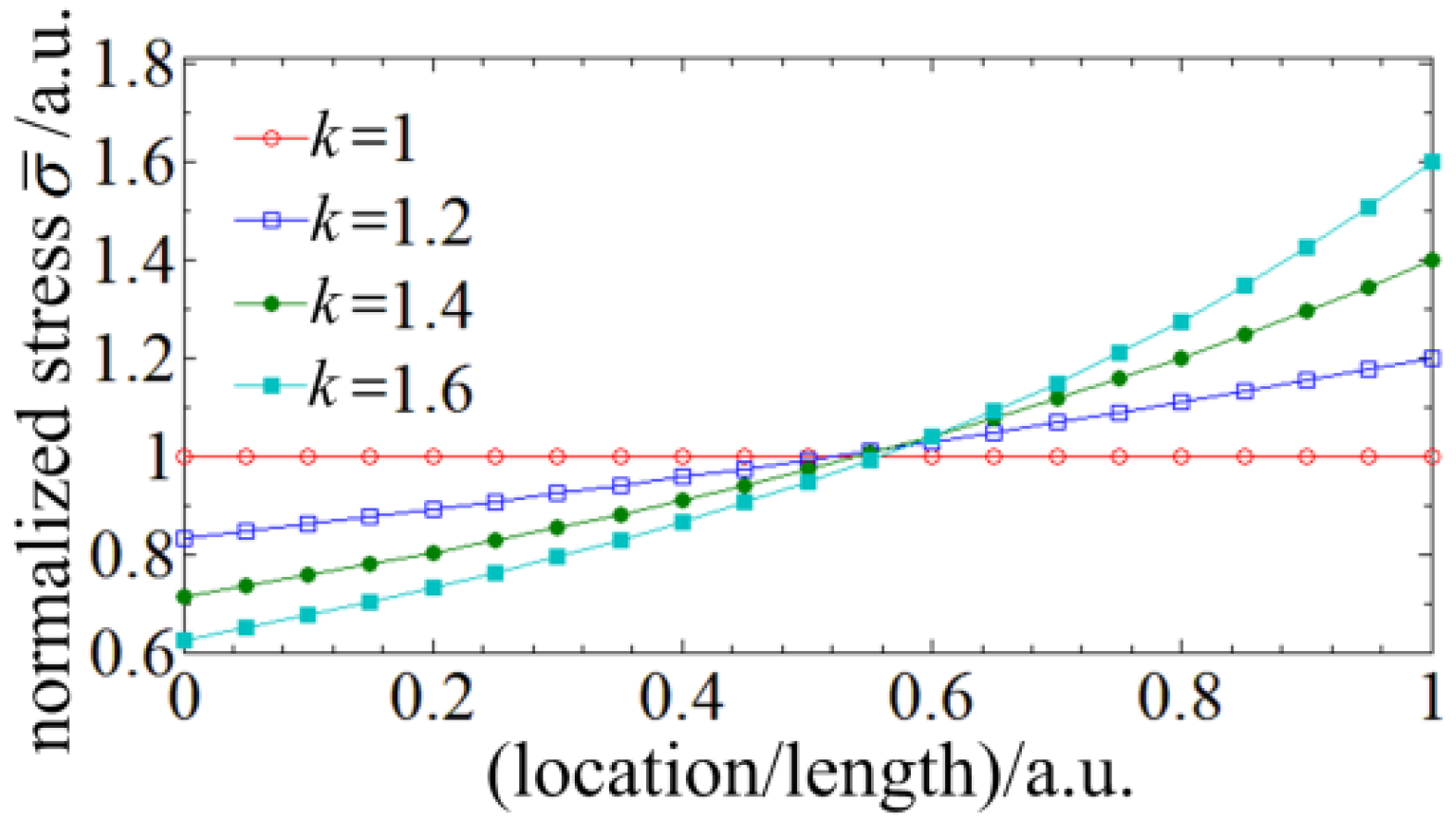
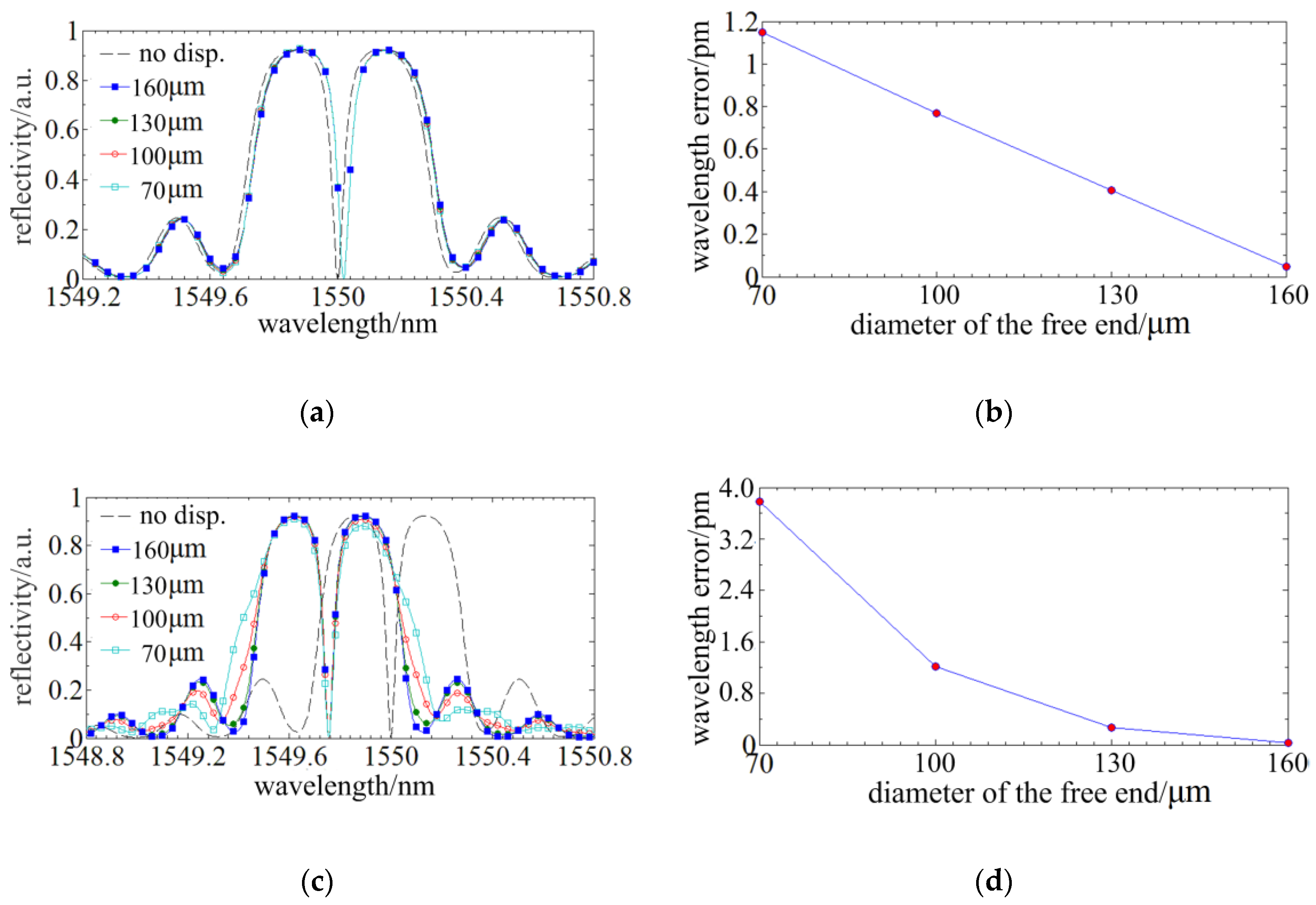
2.3.1. The Influence of the Taper Ratio on Sensing Accuracy
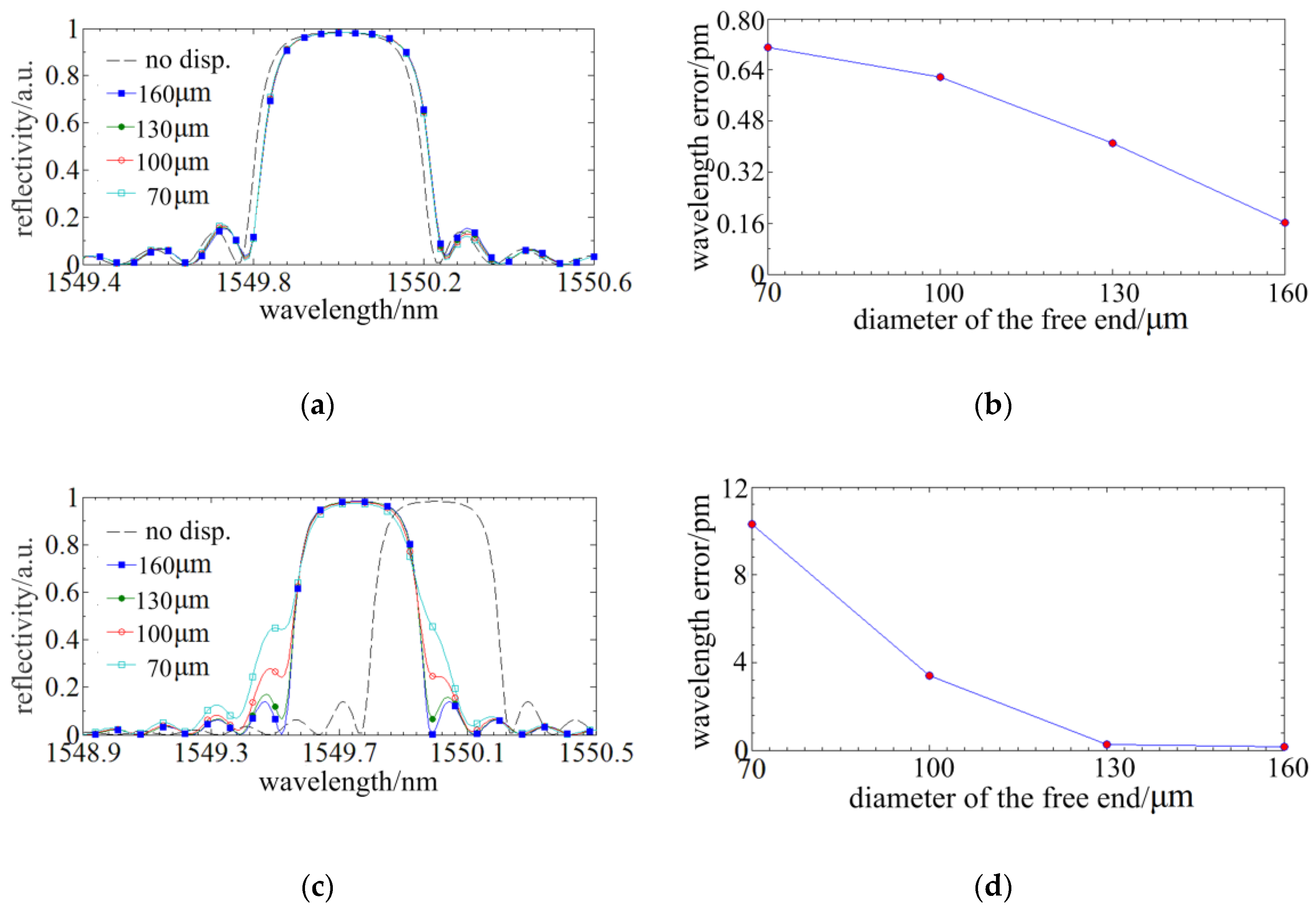
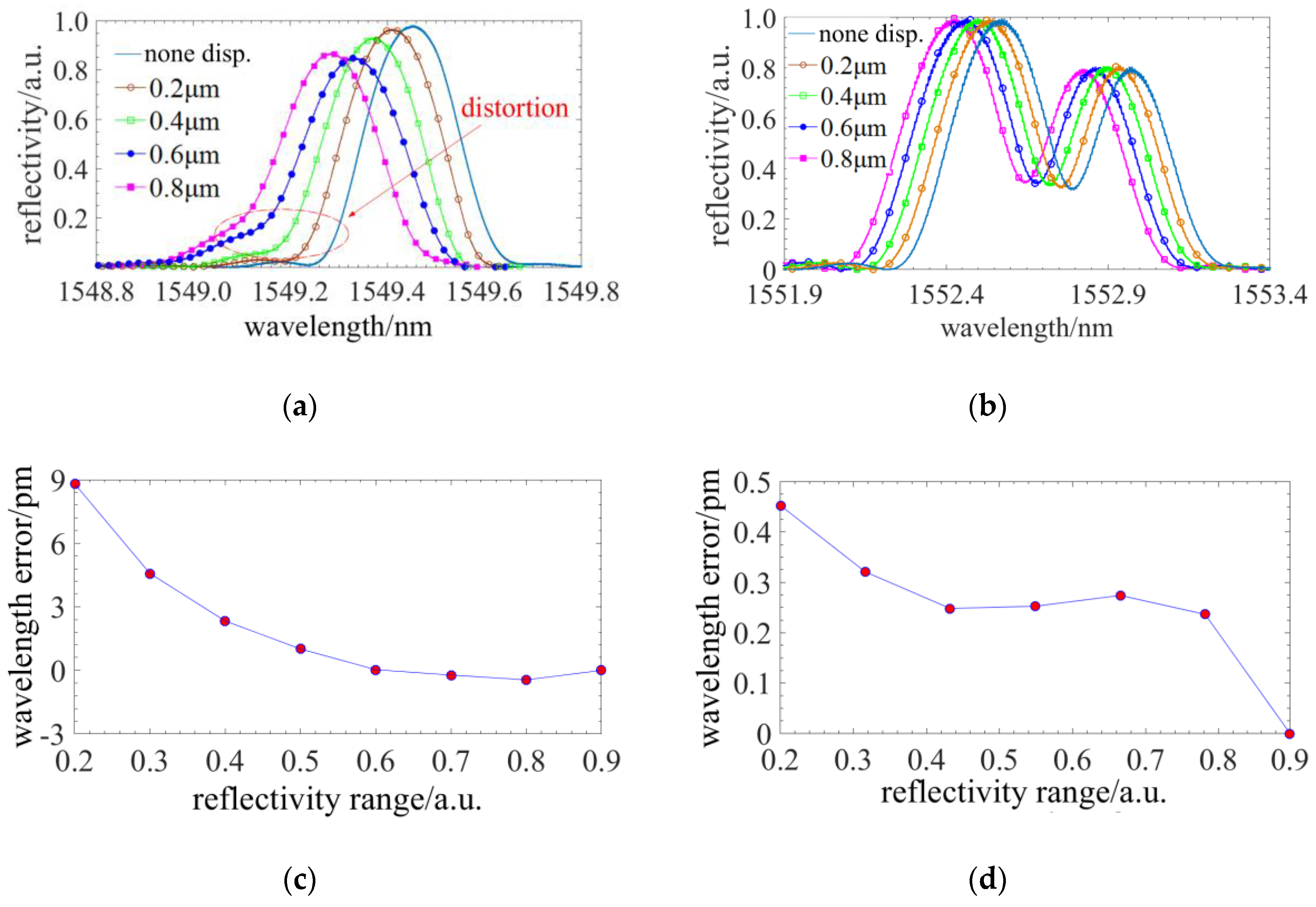
2.3.2. The Improvement of the Phase-Shift Point on Spectrum Distortion
2.3.3. The Sensing Characteristics of the Tapered Four-Cores Phase-Shift FBG Probe
3. Experiments
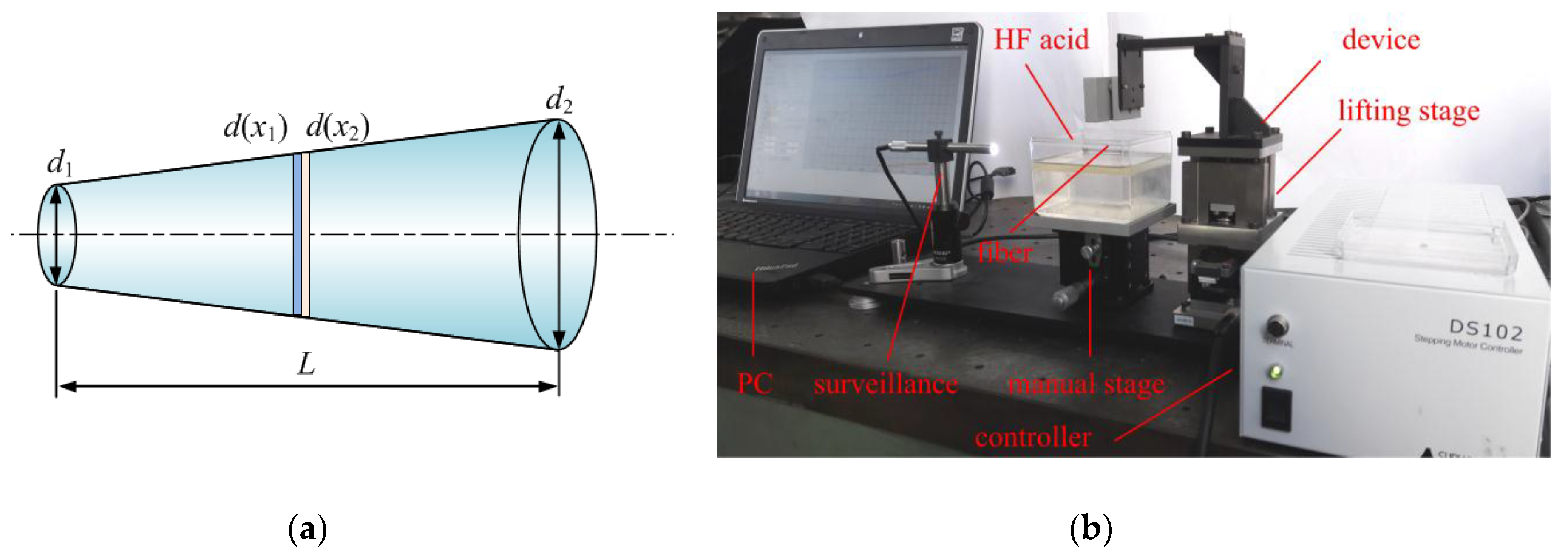
3.1. The Manufacture Method Based on Capillary Self-Assembly Technique for the Probe
3.2. Experimental Setups for the Three-Dimensional Micro-Scale Sensing System
3.3. Experiments on Performance Tests of the Three-Dimensional Micro-Scale Sensing System
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Uhlmann, E.; Mullany, B.; Biermann, D.; Rajurkar, K.; Hausotte, T.; Brinksmeier, E. Process chains for high-precision components with micro-scale features. CIRP Ann. Manuf. Technol. 2016, 65, 549–572. [Google Scholar] [CrossRef]
- Li, X.; Sun, B.; You, H.; Wang, L. Evolution of rolls-royce air-cooled turbine blades and feature analysis. Procedia. Eng. 2015, 99, 1482–1491. [Google Scholar]
- Li, Z.; Wei, X.; Guo, Y.; Sealy, M.P. State-of-art, challenges, and outlook on manufacturing of cooling holes for turbine blades. Mach. Sci. Technol. 2015, 19, 361–399. [Google Scholar] [CrossRef]
- An, B.; Liu, J.; Zhang, C.; Zhou, S. Film cooling of cylindrical hole with a downstream short crescent-shaped block. J. Heat Transfer. 2013, 135, 031702. [Google Scholar] [CrossRef]
- Vinter, J.; Hannius, O.; Norlander, T.; Folkesson, P.; Karlsson, J. Experimental dependability evaluation of a fail-bounded jet engine control system for unmanned aerial vehicles. In Proceedings of the International Conference on Dependable Systems and Networks, Yokohama, Japan, 28 June–1 July 2005. [Google Scholar] [CrossRef]
- Dai, G.; Bütefisch, S.; Pohlenz, F.; Danzebrink, H.U. A high precision micro/nano CMM using piezoresistive tactile probes. Meas. Sci. Technol. 2009, 20, 084001. [Google Scholar] [CrossRef]
- Peiner, E.; Balke, M.; Doering, L. Slender tactile sensor for contour and roughness measurements within deep and narrow holes. IEEE Sens. J. 2008, 8, 1960–1967. [Google Scholar] [CrossRef]
- Schwenke, H.; Wäldele, F.; Weiskirch, C.; Kunzmann, H. Opto-tactile sensor for 2D and 3D measurement of small structures on coordinate measuring machines. CIRP Ann. Manuf. Technol. 2001, 50, 361–364. [Google Scholar] [CrossRef]
- Muralikrishnan, B.; Stone, J.A.; Stoup, J.R. Fiber deflection probe for small hole metrology. Precis. Eng. 2006, 30, 154–164. [Google Scholar] [CrossRef]
- Kunpeng, F.; Jiwen, C.; Hong, D.; Zhang, H.; Zhao, S.; Tan, J. Four-cores FBG probe based on capillary self-assembly fabrication technique for 3D measurement. IEEE Photonics Technol. Lett. 2014, 26, 1778–1781. [Google Scholar]
- Xu, M.G.; Dong, L.; Reekie, L.; Tucknott, J.A.; Cruz, J.L. Temperature-independent strain sensor using a chirped Bragg grating in a tapered optical fibre. Electron. Lett. 1995, 31, 823–825. [Google Scholar] [CrossRef]
- Lima, H.F.; Antunes, P.F.; de Lemos Pinto, J.; Nogueira, R.N. Simultaneous measurement of strain and temperature with a single fiber Bragg grating written in a tapered optical fiber. IEEE Sens. J. 2010, 10, 269–273. [Google Scholar] [CrossRef]
- Abushagur, A.A.G.; Bakar, A.A.A.; Dzulkefly, B.Z.M.S.; Arsad, N. A novel technique employing tapered fiber Bragg grating to solve the axial/transverse forces crosstalk in microsurgical instruments. IEEE Sens. J. 2016, 16, 7671–7680. [Google Scholar] [CrossRef]
- Osuch, T.; Markowski, K.; Jedrzejewski, K. Fiber-optic strain sensors based on linearly chirped tapered fiber Bragg gratings with tailored intrinsic chirp. IEEE Sens. J. 2016, 16, 1558–1748. [Google Scholar] [CrossRef]
- Osuch, T.; Markowski, K.; Manujlo, A.; Jderzejewski, K. Coupling independent fiber optic tilt and temperature sensor based on chirped tapered fiber Bragg grating in double-pass configuration. Sens. Actuator A Phys. 2016, 252, 76–81. [Google Scholar] [CrossRef]
- Markowski, K.; Jedrzejewski, K.; Marzecki, M.; Osuch, T. Linearly chirped tapered fiber-Bragg-grating-based Fabry–Perot cavity and its application in simultaneous strain and temperature measurement. Opt. Lett. 2017, 42, 1464–1467. [Google Scholar] [CrossRef] [PubMed]
- Sechler, E.E. Elasticity in Engineering; Wiley: New York, NY, USA, 1950. [Google Scholar]
- Prabhugoud, M.; Peters, K. Modified transfer matrix formulation for bragg grating strain sensors. J. Lightwave Technol. 2004, 22, 666–674. [Google Scholar] [CrossRef]
- Lamberti, A.; Vanlanduit, S.; De Pauw, B.; Berghmans, F. A novel fast phase correlation algorithm for peak wavelength detection of fiber Bragg grating sensors. Opt. Express. 2014, 22, 7099–7112. [Google Scholar] [CrossRef] [PubMed]
- Feng, K.P.; Cui, J.W.; Li, J.Y.; Tan, J.B. A twin FBG probe and integration with a microhole-measuring machine for the measurement of microholes of high aspect ratios. IEEE/ASME Trans. Mech. 2016, 21, 1242–1251. [Google Scholar] [CrossRef]
- Feng, K.P.; Cui, J.W.; Dang, H.; Wu, W.D.; Sun, X.; Jiang, X.L.; Tan, J.B. An optoelectronic equivalent narrowband filter for high resolution optical spectrum analysis. Sensors 2017, 17, 348. [Google Scholar] [CrossRef] [PubMed]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fiber Groups | 5 mm | 4 mm | 3 mm | 2 mm | 1 mm | 0 mm |
|---|---|---|---|---|---|---|
| #1 | 125.9 μm | 113.5 μm | 98.3 μm | 83.3 μm | 68.0 μm | 53.5 μm |
| #2 | 125.7 μm | 111.7 μm | 97.6 μm | 82.4 μm | 66.1 μm | 52.5 μm |
| Mean | 125.8 μm | 112.6 μm | 98.0 μm | 82.9 μm | 67.1 μm | 53.0 μm |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, K.; Cui, J.; Sun, X.; Dang, H.; Shi, T.; Niu, Y.; Jin, Y.; Tan, J. Investigation of a Three-Dimensional Micro-Scale Sensing System Based on a Tapered Self-Assembly Four-Cores Fiber Bragg Grating Probe. Sensors 2018, 18, 2824. https://doi.org/10.3390/s18092824
Feng K, Cui J, Sun X, Dang H, Shi T, Niu Y, Jin Y, Tan J. Investigation of a Three-Dimensional Micro-Scale Sensing System Based on a Tapered Self-Assembly Four-Cores Fiber Bragg Grating Probe. Sensors. 2018; 18(9):2824. https://doi.org/10.3390/s18092824
Chicago/Turabian StyleFeng, Kunpeng, Jiwen Cui, Xun Sun, Hong Dang, Tangjun Shi, Yizhao Niu, Yihua Jin, and Jiubin Tan. 2018. "Investigation of a Three-Dimensional Micro-Scale Sensing System Based on a Tapered Self-Assembly Four-Cores Fiber Bragg Grating Probe" Sensors 18, no. 9: 2824. https://doi.org/10.3390/s18092824
APA StyleFeng, K., Cui, J., Sun, X., Dang, H., Shi, T., Niu, Y., Jin, Y., & Tan, J. (2018). Investigation of a Three-Dimensional Micro-Scale Sensing System Based on a Tapered Self-Assembly Four-Cores Fiber Bragg Grating Probe. Sensors, 18(9), 2824. https://doi.org/10.3390/s18092824