Three-Dimensional Imaging of Terahertz Circular SAR with Sparse Linear Array


Abstract
:1. Introduction
2. 3D Imaging Methodology
2.1. Imaging Geometry
2.2. 2D Phase-Preserving Imaging Method
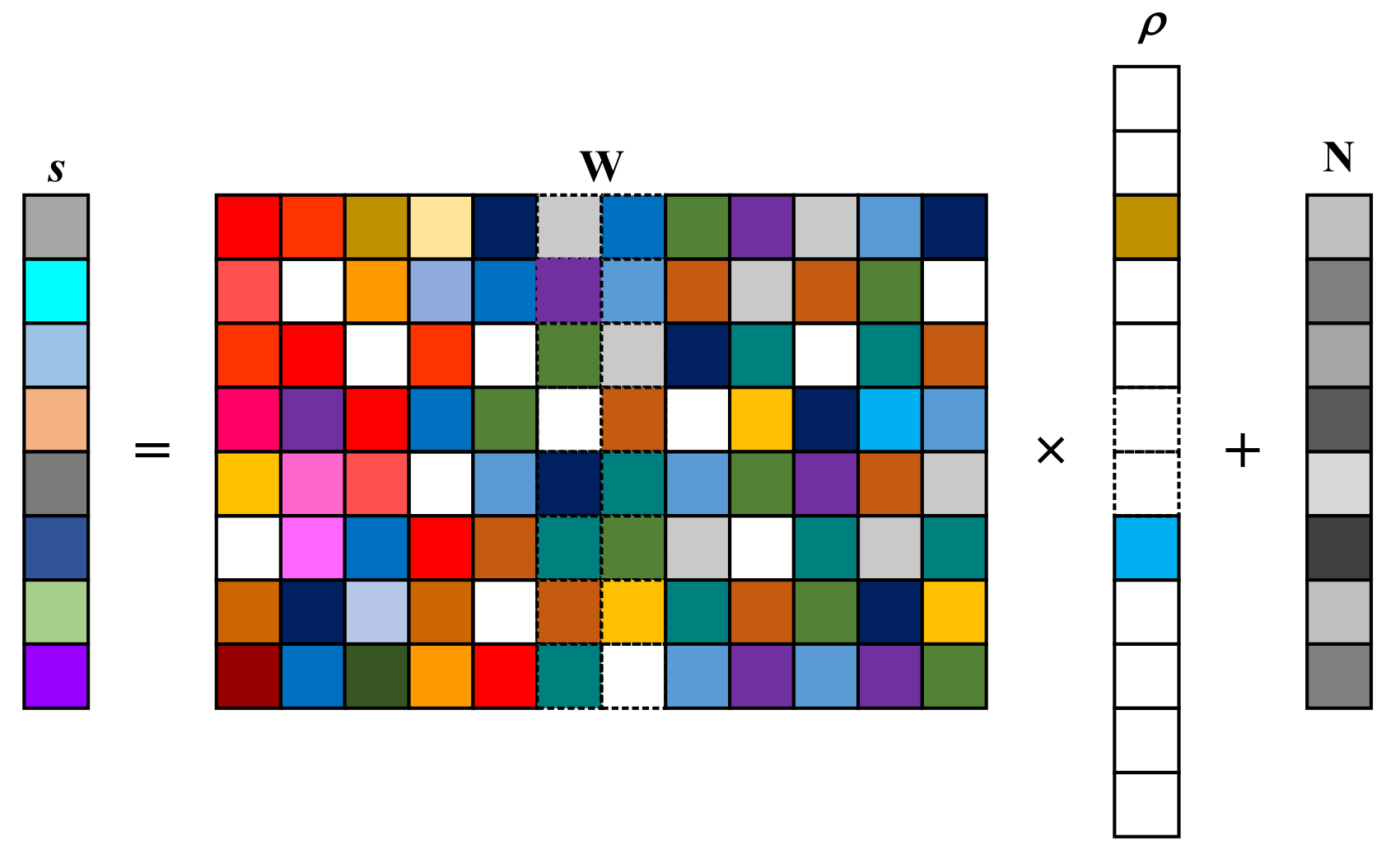
2.3. Scattering Coefficient Reconstruction along the Height Direction
| Algorithm 1: Processing procedure of sparse Bayesian learning. |
| Input: |
| 2D image vector , matrix ; |
| noise parameter ; |
| initial hyperparamter ; |
| stop value ; |
| Output: |
| mean , covariance ; |
| 1: BEGIN |
| 2: initialize step ; |
| 3: do |
| 4: Compute the estimated mean and covariance using Equation (22); |
| 5: Update , |
| 6: Calculate hyperparameter using Equation (25); |
| 7: ; |
| 8: while |
| 9: ; |
| 10: end do |
| 11: return , . |
| 12: END |
3. Simulations and Experiments
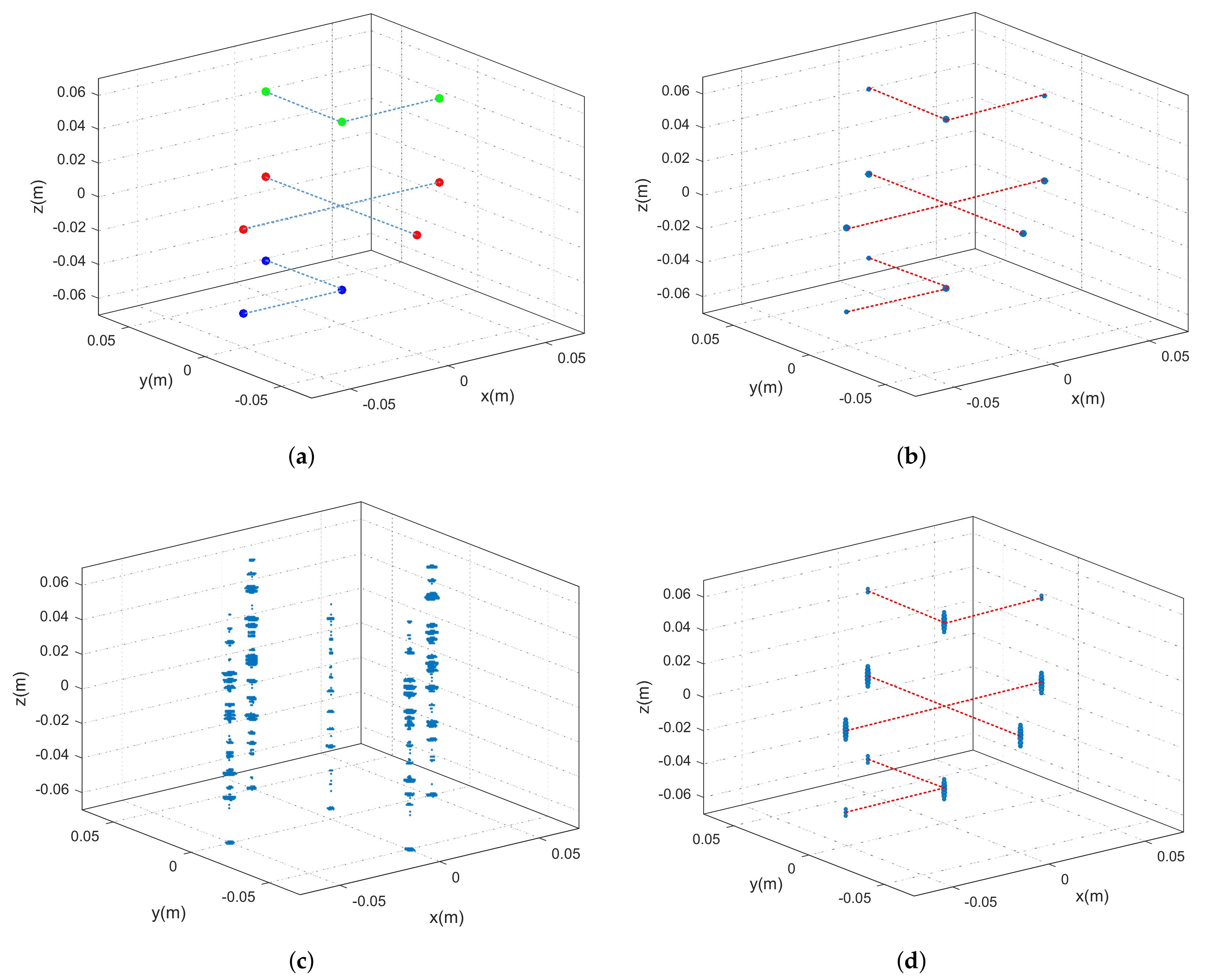
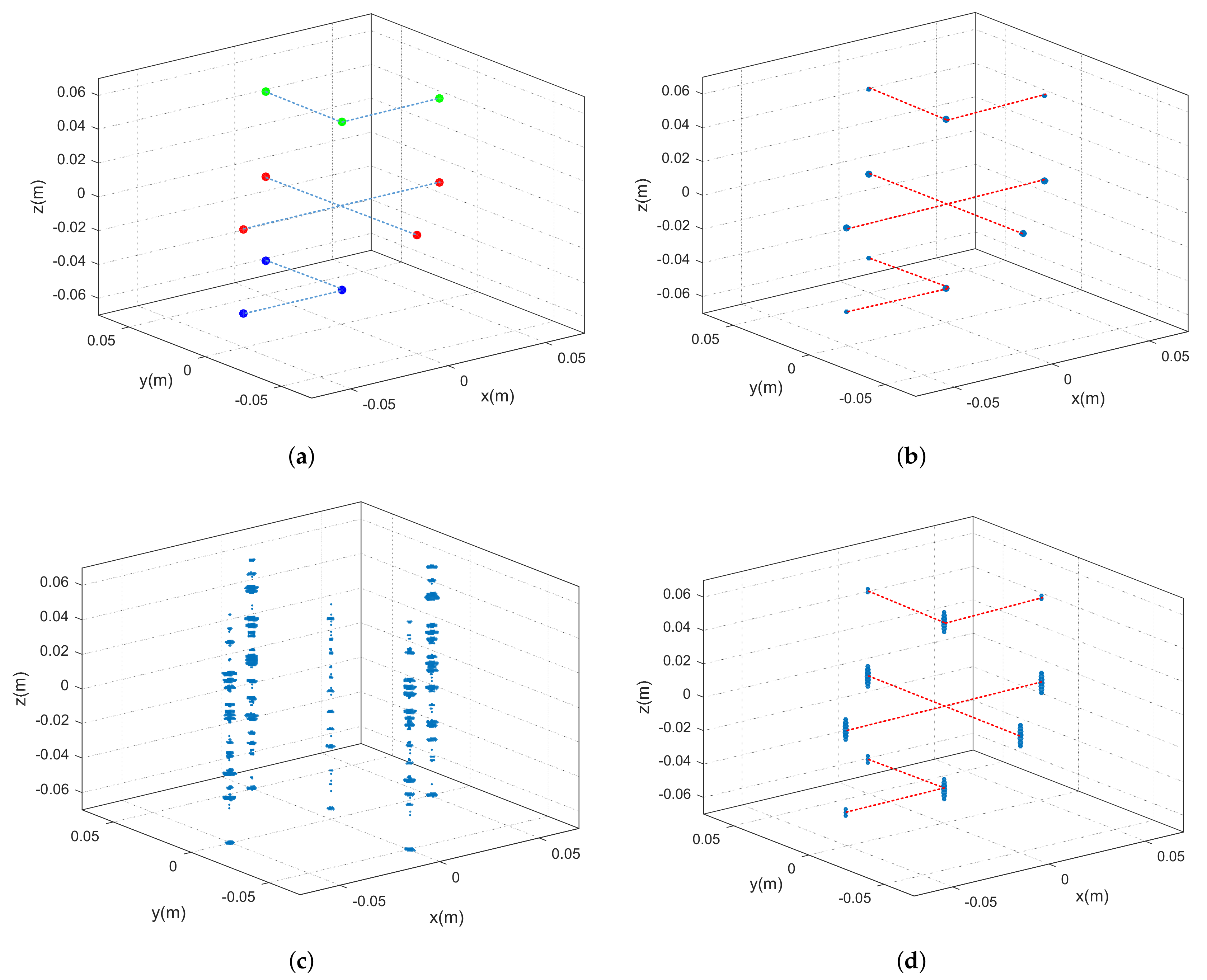
3.1. Simulation Results and Analysis
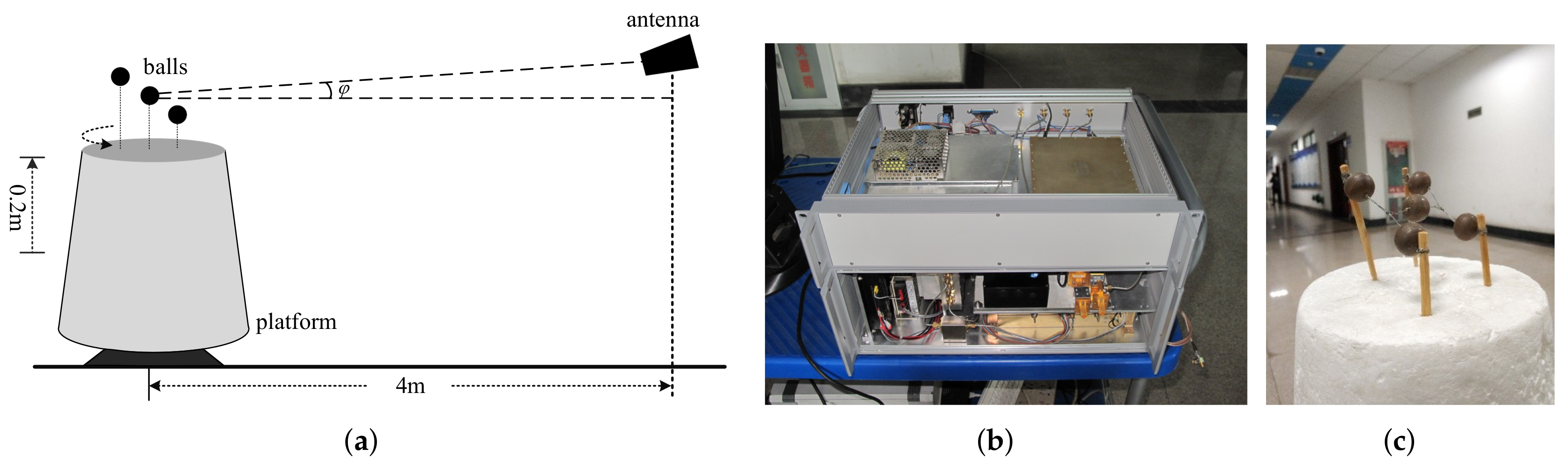
3.2. Experiment Results and Analysis
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Agarwal, S.; Kumar, B.; Singh, D. Non-invasive concealed weapon detection and identification using V band millimeter wave imaging radar system. In Proceedings of the 2015 National Conference on Recent Advances in Electronics & Computer Engineering (RAECE), Roorkee, India, 13–15 February 2016; pp. 258–262. [Google Scholar]
- Sheen, D.M.; McMakin, D.L.; Hall, T.E. Active millimeter-wave and sub-millimeter-wave imaging for security applications. In Proceedings of the 2011 International Conference on Infrared, Millimeter, and Terahertz Waves, Houston, TX, USA, 2–7 October 2011; Volume 47, pp. 1–3. [Google Scholar]
- Zhang, R.; Cao, S. 3D Imaging Millimeter Wave Circular Synthetic Aperture Radar. Sensors 2017, 17, 1419. [Google Scholar] [CrossRef] [PubMed]
- Bao, Q.; Jiang, C.; Lin, Y.; Tan, W.; Wang, Z.; Hong, W. Measurement Matrix Optimization and Mismatch Problem Compensation for DLSLA 3-D SAR Cross-Track Reconstruction. Sensors 2016, 16, 1333. [Google Scholar] [CrossRef] [PubMed]
- Baccouche, B.; Agostini, P.; Mohammadzadeh, S.; Kahl, M.; Weisenstein, C.; Jonuscheit, J. Three-dimensional terahertz imaging with sparse multistatic line arrays. IEEE J. Sel. Top. Quantum Electron. 2017, 23, 1–11. [Google Scholar] [CrossRef]
- Yang, X.; Pi, Y.; Liu, T. Three-Dimensional Imaging of Spinning Space Debris Based on the Broadband Radar. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1027–1031. [Google Scholar] [CrossRef]
- Sasaki, Y.; Shang, F.; Kidera, S.; Kirimoto, T.; Saho, K.; Sato, T. Three-dimensional imaging method incorporating range points migration and doppler velocity estimation for UWB millimeter-wave radar. IEEE Geosci. Remote Sens. Lett. 2017, 14, 122–126. [Google Scholar] [CrossRef]
- Zhang, B.; Pi, Y.; Li, J. Terahertz imaging radar with inverse aperture synthesis techniques: System structure, signal processing, and experiment results. IEEE Sens. J. 2015, 15, 290–299. [Google Scholar] [CrossRef]
- Yang, X.; Pi, Y.; Liu, T.; Wang, H. Three-dimensional imaging of space debris with space-based terahertz radar. IEEE Sens. J. 2017, 18, 1063–1072. [Google Scholar] [CrossRef]
- Yang, Q.; Deng, B.; Wang, H.; Qin, Y.; Zhang, Y. Envelope Correction of Micro-Motion Targets in the Terahertz ISAR Imaging. Sensors 2018, 18, 228. [Google Scholar] [CrossRef] [PubMed]
- Soumekh, M. Reconnaissance with slant plane circular SAR imaging. IEEE Trans. Image Process. A Publ. IEEE Signal Process. Soc. 1996, 5, 1252–1265. [Google Scholar] [CrossRef] [PubMed]
- Dallinger, A.; Schelkshorn, S.; Detlefsen, J. Efficient ω-k algorithm for circular SAR and cylindrical reconstruction areas. Adv. Radio Sci. 2006, 4, 85–91. [Google Scholar] [CrossRef]
- Kou, L.; Wang, X.; Chonq, J.; Xianq, M.; Zhu, M. Circular SAR processing using an improved omega-k type algorithm. J. Syst. Eng. Electron. 2010, 21, 572–579. [Google Scholar] [CrossRef]
- Jiao, Z.; Ding, C.; Liang, X.; Chen, L.; Zhang, F. Sparse Bayesian Learning Based Three-Dimensional Imaging Algorithm for Off-Grid Air Targets in MIMO Radar Array. Remote Sens. 2018, 10, 369. [Google Scholar] [CrossRef]
- Ertin, E.; Moses, R.L.; Potter, L.C. Interferometric methods for three-dimensional target reconstruction with multipass circular SAR. IET Radar Sonar Navig. 2010, 4, 464–473. [Google Scholar] [CrossRef]
- Bao, Q.; Lin, Y.; Hong, W.; Shen, W.; Zhao, Y.; Peng, X. Holographic SAR tomography image reconstruction by combination of adaptive imaging and sparse bayesian inference. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1248–1252. [Google Scholar] [CrossRef]
- Tian, H.; Li, D. Sparse flight array SAR downward-looking 3D imaging based on compressed sensing. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1395–1399. [Google Scholar] [CrossRef]
- Hu, C.; Wang, J.; Tian, W.; Zeng, T.; Wang, R. Design and Imaging of Ground-Based Multiple-Input Multiple-Output Synthetic Aperture Radar (MIMO SAR) with Non-Collinear Arrays. Sensors 2017, 17, 598. [Google Scholar] [CrossRef] [PubMed]
- Sun, C.; Wang, B.; Fang, Y.; Song, Z.; Wang, S. Multichannel and Wide-Angle SAR Imaging Based on Compressed Sensing. Sensors 2017, 17, 295. [Google Scholar] [CrossRef] [PubMed]
- Hu, X.; Tong, N.; Zhang, Y.; Hu, G. Multiple-input–multiple-output radar super-resolution three-dimensional imaging based on a dimension-reduction compressive sensing. IET Radar Sonar Navig. 2016, 10, 757–764. [Google Scholar] [CrossRef]
- He, X.; Tong, N.; Hu, X. Superresolution radar imaging based on fast inverse-free sparse Bayesian learning for multiple measurement vectors. J. Appl. Remote Sens. 2018, 12, 015013. [Google Scholar]
- Al-Shoukairi, M.; Schniter, P.; Rao, B.D. A gamp based low complexity sparse bayesian learning algorithm. IEEE Trans. Signal Process. 2018, 66, 294–308. [Google Scholar] [CrossRef]
- Tang, V.H.; Bouzerdoum, A.; Phung, S.L.; Tivive, F.H.C. A sparse bayesian learning approach for through-wall radar imaging of stationary targets. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2485–2501. [Google Scholar] [CrossRef]
- Xu, G.; Yang, L.; Bi, G.; Xing, M. Enhanced ISAR imaging and motion estimation with parametric and dynamic sparse bayesian learning. IEEE Trans. Comput. Imaging 2017, 3, 940–952. [Google Scholar] [CrossRef]
- Majewski, R.M.; Carrara, R.; Goodman, R. Spotlight Synthetic Aperture Radar: Signal Processing Algorithms; Artech House: London, UK, 1995. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Carrier frequency | 340 GHz |
| Bandwidth | 28 GHz |
| Pulse duration time | 1 ms |
| Radar radius | 5 m |
| Equivalent receiving antenna number | 9 |
| Aperture length in height direction | 0.2 m |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hao, J.; Li, J.; Pi, Y. Three-Dimensional Imaging of Terahertz Circular SAR with Sparse Linear Array. Sensors 2018, 18, 2477. https://doi.org/10.3390/s18082477
Hao J, Li J, Pi Y. Three-Dimensional Imaging of Terahertz Circular SAR with Sparse Linear Array. Sensors. 2018; 18(8):2477. https://doi.org/10.3390/s18082477
Chicago/Turabian StyleHao, Jubo, Jin Li, and Yiming Pi. 2018. "Three-Dimensional Imaging of Terahertz Circular SAR with Sparse Linear Array" Sensors 18, no. 8: 2477. https://doi.org/10.3390/s18082477
APA StyleHao, J., Li, J., & Pi, Y. (2018). Three-Dimensional Imaging of Terahertz Circular SAR with Sparse Linear Array. Sensors, 18(8), 2477. https://doi.org/10.3390/s18082477