There is an increasing concern in developed societies regarding population aging. Moreover, sensitivity to inclusion of people with disabilities also pushes the research and investment in assistive technologies. This paper focuses on the attendant driving interface for powered wheelchairs as example application, though the conclusions apply to other systems such as trolleys [
1], or smart walkers [
2]. The attendant is required when the user is not able to drive the chair on his or her own, for instance because of cognitive impairment. The commercial standard solution is the use of a joystick at the rear of the chair. However, this device is not intuitive to use [
3], and it is better to implement interfaces closer to those that people use daily to drive trolleys or similar systems, such as handlebars. Several robotic wheelchairs or trolleys have been developed with force and torque sensors embedded in the handlebar to register the force and torque exerted by the driver on it as control inputs [
4,
5,
6]. The authors of this paper proposed the use of tactile sensors instead of force sensors for that purpose. This technology was presented in [
3,
7], and tests to show its feasibility were reported in those works. The aim of this paper is to cover a few key aspects of the tactile handlebar as steering device that the authors think can be certainly useful for researchers and engineers who cope with the development of similar technologies or new applications. Tactile sensors can be integrated in multimodal human-machine interfaces. Tactile images or dynamic patterns can be a way to communicate commands to a robot [
8]. For instance, different gestures as “grab”, “poke”, “press”, etc. are identified by the machine through processing of the tactile map in [
9]. Reference [
10] presents also results of static and dynamic tactile gesture recognition for intuitive human-robot interfacing. Touch gestures such as “back left, back right, side left, side right, front left and front right” are chosen in [
11] to illustrate the feasibility of tactile intuitive communication with a humanoid robot. All these works commonly extract features from the tactile map and use a classifier to determine the kind of gesture. This is also done in [
12] to build isometric joysticks that are advantageous for people that suffer from tremor. This device has similarities with that proposed by the authors in [
7], since it is intended to replace a conventional joystick, it does not move, and it is based on the interaction with a tactile sensor. Another similar device was also presented in [
13] as steering device. When compared with other kind of sensors that could also be used to build the interface, such as cameras or force sensors [
1], tactile sensors do not have the problem of occlusion that could affect to camera-based interfaces [
14,
15], and they can be integrated more effectively in an ergonomic interface than force sensors because they are actually a sort of artificial skin or sensitive cover [
8]. However, the sensors should be conformable to adapt to different shapes, although they do not have to be necessarily stretchable since we contemplate segments or structures without moveable joints. Different technologies to implement flexible and conformable tactile sensors can be found in [
16]. Advanced technologies are based on woven-like fabrics or printed electronics on flexible substrates. However, a common solution consists in using flexible Printed Circuit Boards (PCB) and solder off-the-shelf sensors to them. This is the solution implemented in this paper. A similar approach for a larger array was reported by the authors in [
17]. However, this solution is only valid to conform to cylindrical shapes. To conform to other 3D surfaces it is possible to use triangular tactile sensing modules. Therefore, round fixed surfaces can hold the sensor, and many already developed systems and machines could be equipped with these devices without a costly re-design. Finally, as mentioned before, tactile sensors offer a way to communicate a large set of gestures that can enrich the capability of the interface. Nevertheless, the output of a tactile sensor is not so crisp as that from a force sensor at the time to build an interface. Firstly, the output is not a short vector, but a quite long array of data provided by all the tactile elements (tactels). Therefore, the engineer has to find the way to obtain the variables for his or her application from such output. Secondly, touch has an implicit nature of close contact with the human being, and this involves ergonomic issues that concern drastically the performance of the interface. This can enclose aspects such as different average forces for the same gesture, different ways to grasp, etc. Moreover, a transient phase could also be contemplated until the human-sensor interface is ready to clearly detect different patterns, which is observed in the case of the steering application. All these not obvious aspects about the usage and design of this interface are discussed in this paper, where results from several experiments are used to show the design rules behind.
The structure of this paper is the following: in
Section 2 a brief outline of previous published work is given. It aims to help the reader better follow this article. In
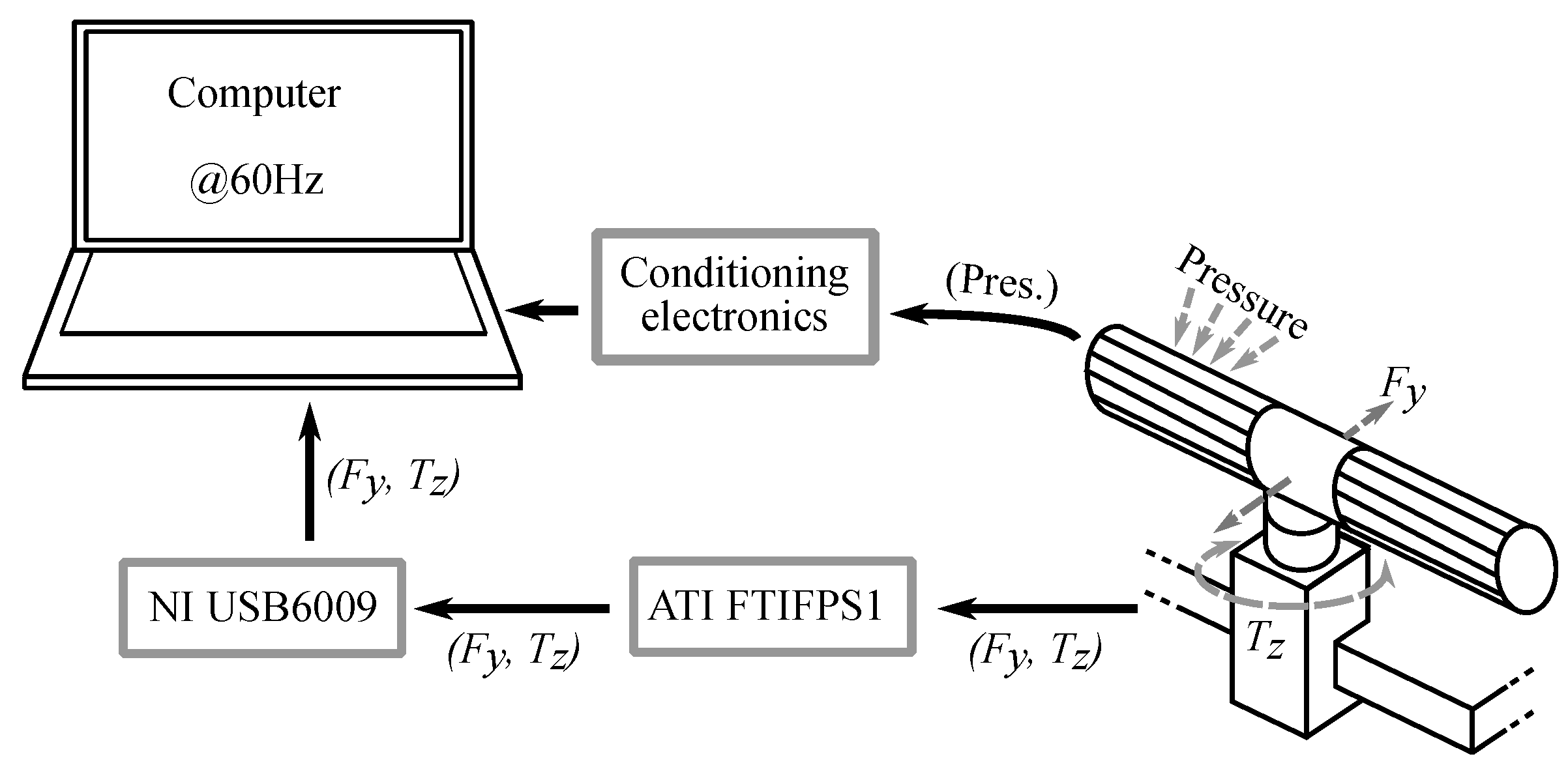
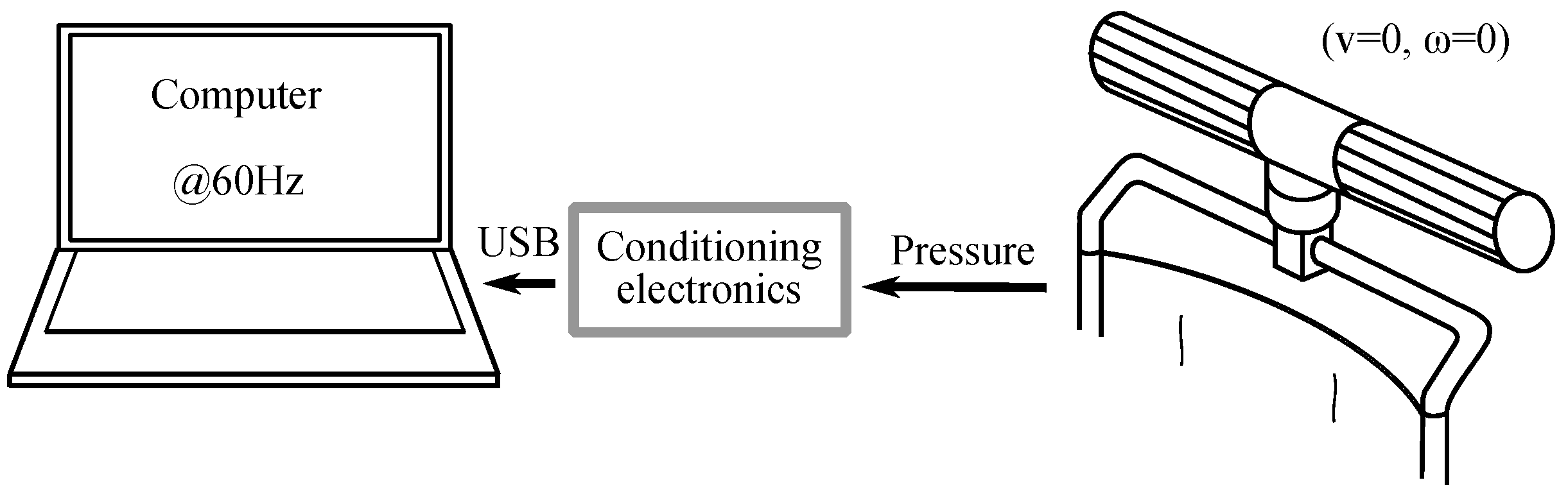
Section 3, the basic setup that is common to all the experiments is introduced together with a brief description of the latter and the involved parameters.
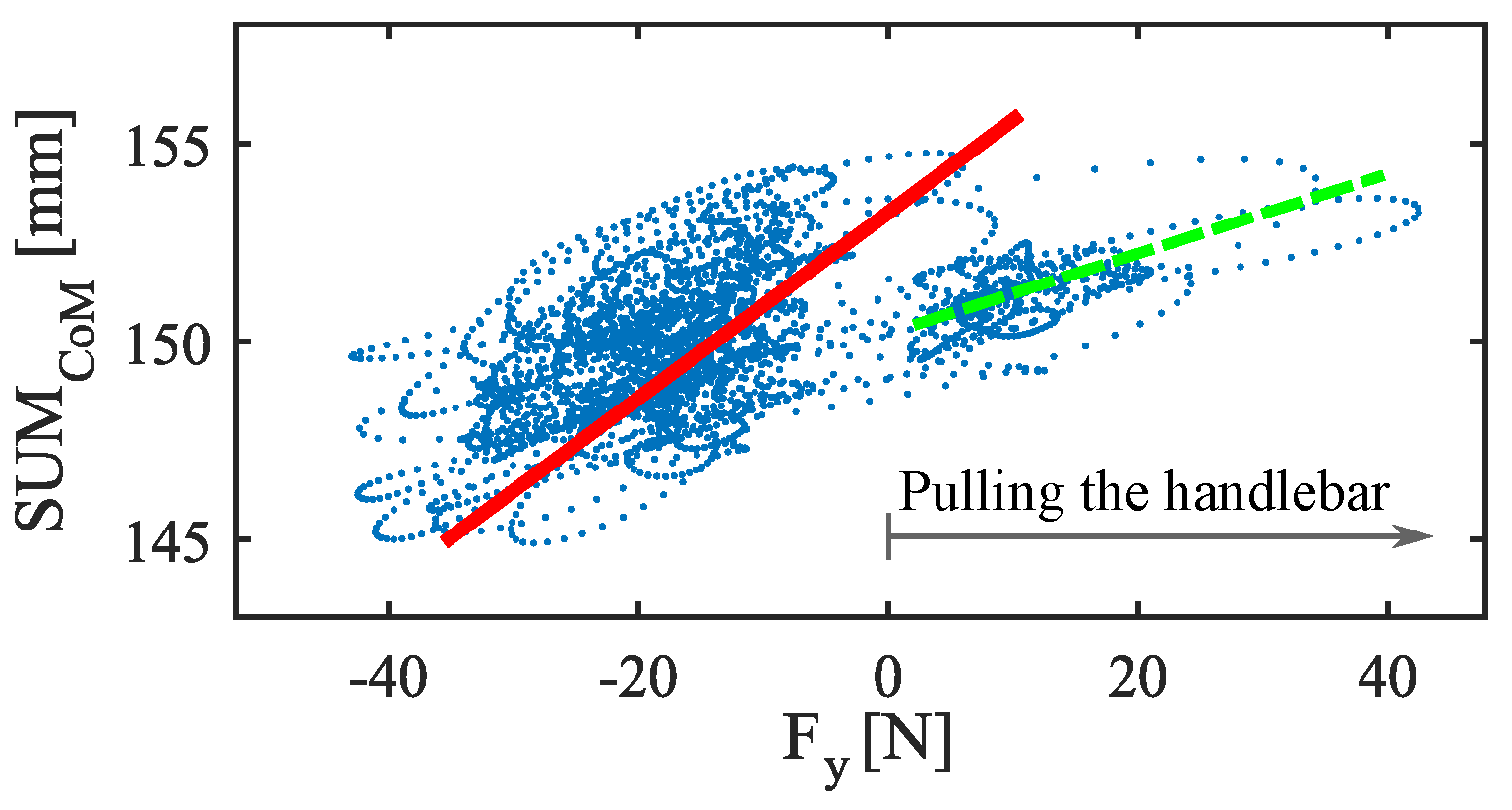
Section 4 describes the interaction between the handlebar and the user in terms of force and torque and the proposal of two variables that may relate to the latter signals. Sections from
Section 5,
Section 6 and
Section 7 cover different human factors that may influence the performance of the system based on the two suggested variables. Concretely,
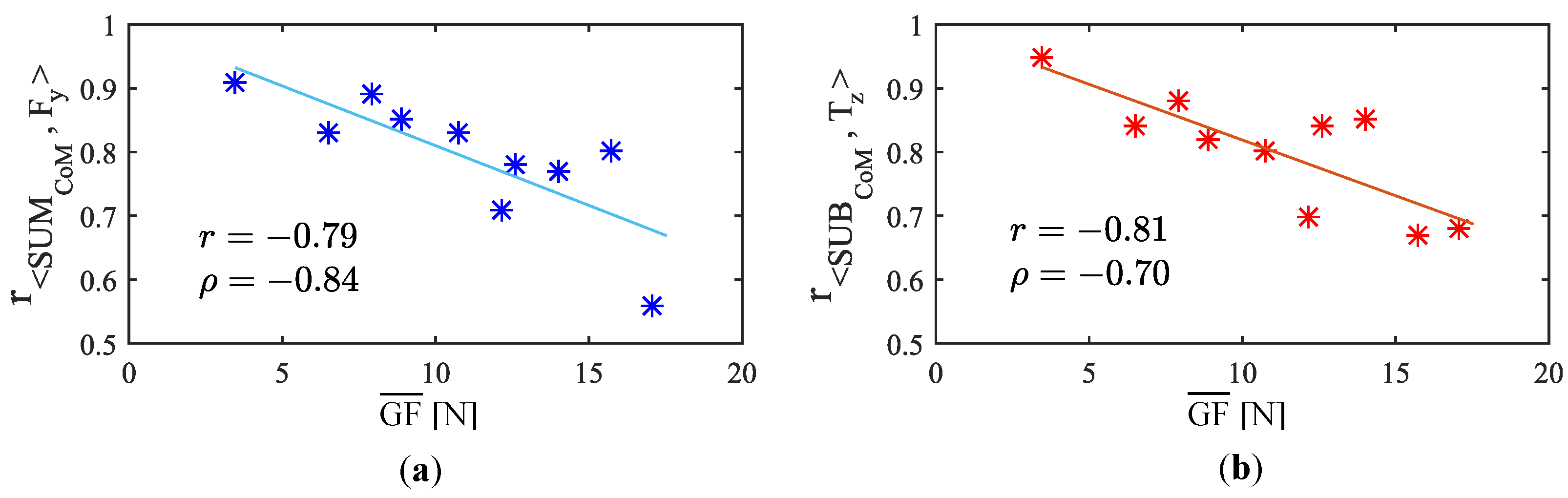
Section 5 explores the impact of the handlebar gripping force. In
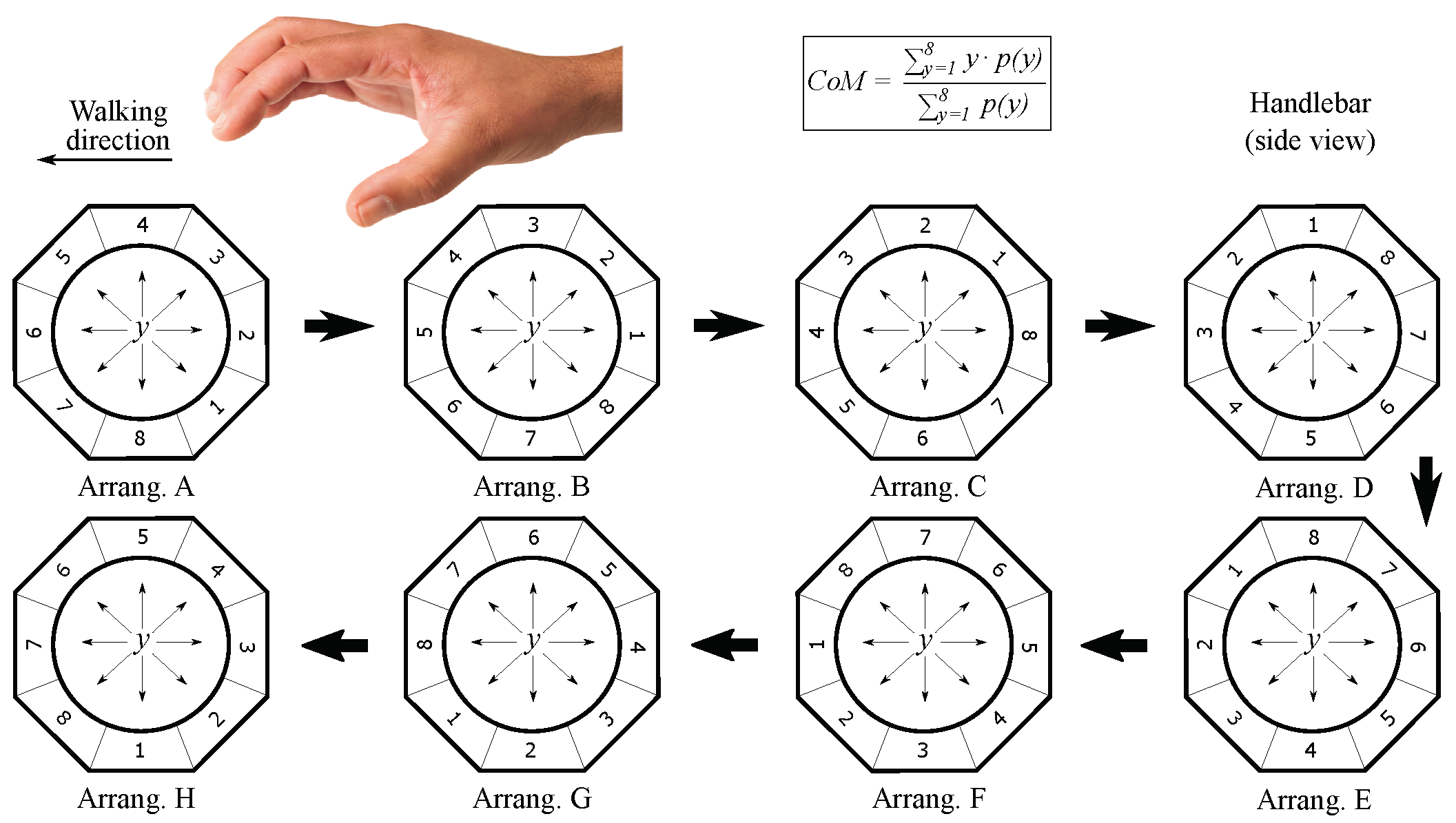
Section 6, the consequences of varying the arrangement of the tactels inside the tactile sensor are studied. In
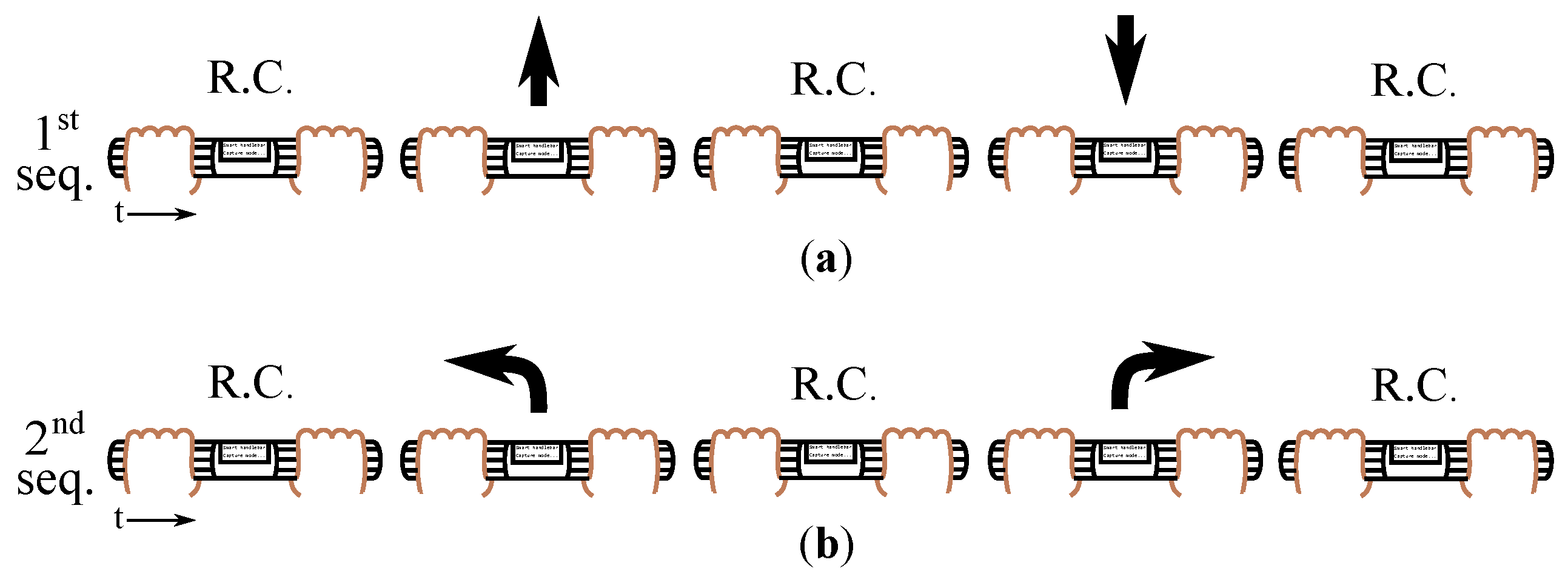
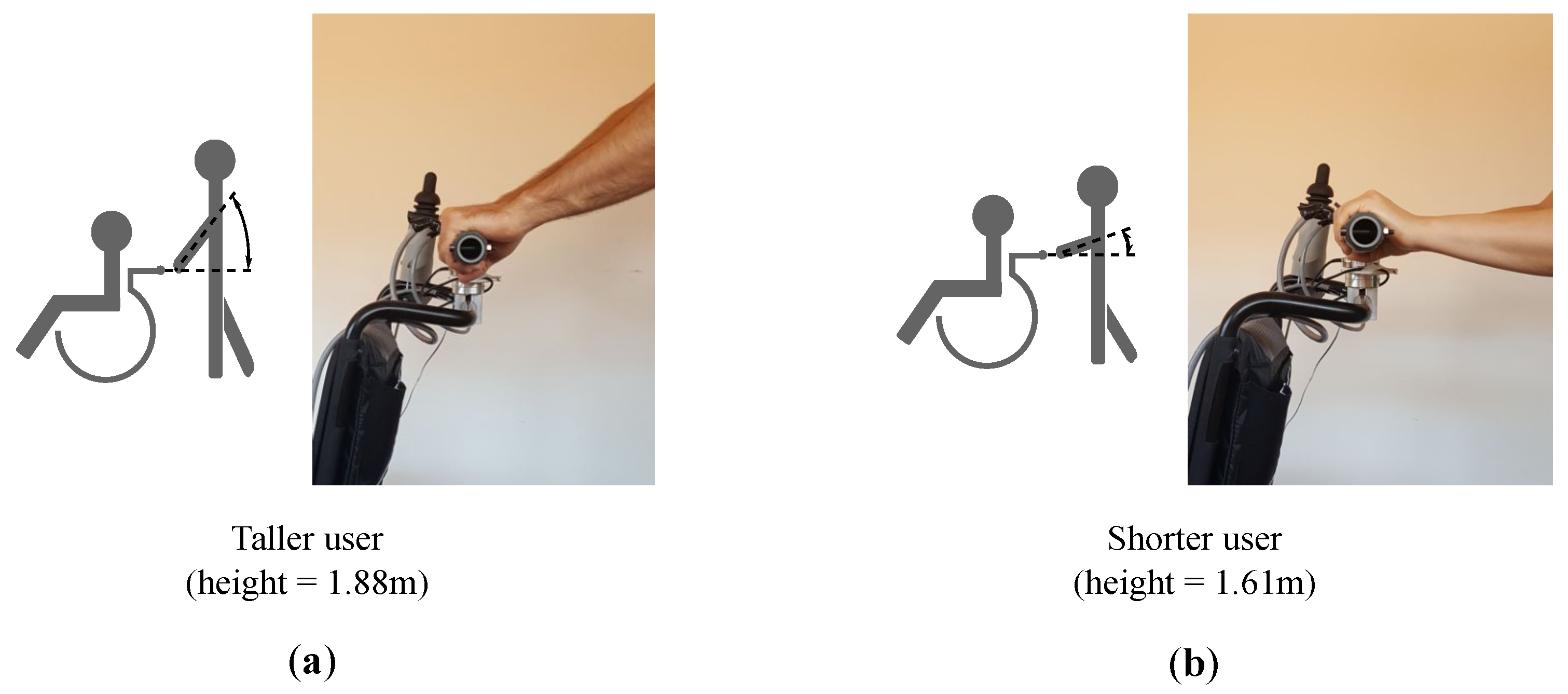
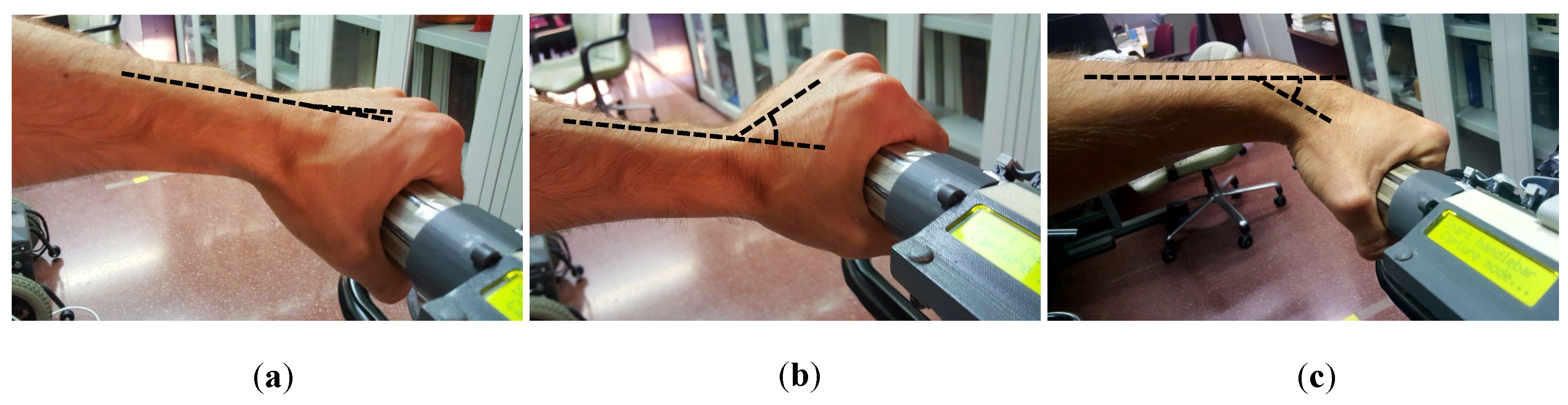
Section 7 the analysis of the grasping process is detailed. Finally,
Section 8 gathers the conclusions of the present work.




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}