1. Introduction
In recent years, magnetic bearing has been developed and commercialized due to its advantages of no mechanical contact and no need of lubrication. In all kinds of active magnetic bearings, the thrust magnetic bearing can adjust the axial displacement of the rotor shaft, and is usually used in the thrust direction active suspension control [
1]. For the thrust magnetic bearing, the load mass often changes greatly during the working process.When the load mass of the thrust bearing changes, the corresponding parameters of the system will change, and the balance point of the system will also deviate from the original balance point [
2,
3]. At this time, the original fixed control parameters will not ensure that the system is in the optimal stable suspension state, and the performance of the system will become worse or even self excited [
4].
Self-excited vibration is often encountered in the magnetic levitation control system and is one of the most difficult problems to be solved [
1,
5,
6]. On the one hand, the self-excited vibration aggravates the workload of control system and increases the energy consumption of the system. On the other hand, the self-excited vibration makes the performance of control system deteriorate and directly affects the stability of the whole system. Therefore, the control stability of the thrust magnetic bearing must be solved when the load mass is changed in a large range.
The study shows that the self-excited vibration of the magnetic levitation thrust bearing is closely related to the bifurcation of the system equation [
1,
7,
8]. In fact, the thrust magnetic bearing is a typical open-loop unstable nonlinear system. In engineering, the nonlinear system is often linearized at its equilibrium point, and then a corresponding PID controller is designed for the nonlinear system. The practice shows that the stability range of the linear controller designed for the nonlinear system is limited. When the change of the equilibrium point of the nonlinear system is relatively small, the designed linear controller is usually effective. Once a certain parameter of the system changes greatly, such as the parameter of the load mass, the balance point of the system will also shift considerably. Then, the above linear controller will not adapt to the new state [
2,
8,
9].
Many researchers have considered the effect on the stability and bifurcation of the active thrust magnetic bearing rotor systems [
10,
11]. The model is reduced by a component mode synthesis method, which can conveniently account for nonlinear magnetic forces and moments of the bearing. Then, the system equations are obtained by combining the equations of the reduced mechanical system and the equations of the decentralized PID controllers. The local stability and bifurcation behaviors of periodic motions are obtained by using Floquet theory.
In fact, there are some common ways to solve this problem for this nonlinear system. The feedback linearization method is mainly used in the design of nonlinear system controller, and it has received extensive attention in recent years [
12,
13,
14]. Because the feedback linearization method utilizes all the nonlinear descriptions of maglev system, its control performance will not change with the change of system working point in a large range. The disadvantage of this method is that the whole states of the system are need to be measured, and in practical engineering practice, it is often difficult to meet. In addition, when the system parameters are uncertain, the performance of the system with the feedback linearization control method cannot be guaranteed [
14].
In view of the above problems, this paper focuses on the linear adaptive control method of magnetic levitation thrust bearing when the load mass varies greatly. First, the suspension control system model of the thrust magnetic bearing is given, and then the characteristics of the system are analyzed. An adaptive control law considering the variable parameters of load mass is designed. Finally, the effectiveness of the above method is verified by simulation.
2. Linear Stability Analysis and Existence of Hopf Bifurcation
The suspension control system of the electromagnetic thrust bearing is shown in
Figure 1. It is composed of the electromagnet, the coils, the suspension controller, the displacement sensor, the load and so on.
As shown in
Figure 1, the sensor can detect in real time the displacement between the electromagnet and the load platform, and transmit the displacement signal to the controller. The controller can calculate the appropriate control value and then provide the appropriate current to the electromagnet coil winding. The magnet will generate enough electromagnetic force to overcome the gravity of the load and achieve a stable suspension state.
The relationship about the electromagnetic force generated by the electromagnet, the current and the magnetic gap is [
6,
15,
16]
where
is the magnetic permeability in vacuum,
N is the number of turns of coil,
A is the pole area,
i is the current and
z is the length of the magnetic gap.
The dynamical equation of the load is
where
m is the load mass,
g is the acceleration of gravity,
a is the gravity acceleration in the vertical direction of the load, and
represents the disturbance force on the load.
The electrical equation of the electromagnet coil is [
6,
15,
16]
where
u is the port voltage of the electromagnet winding and
R is the resistance of the electromagnet.
The feedback control is often applied to the port voltage of the electromagnet, that is
where
U represents the port voltage in the static state, and
and
are, respectively, displacement and velocity feedback control coefficients.
By combining the above equations, we have
By adjusting the cont rol parameters and , the system can maintain the stable suspension state.
3. Analysis of Vibration Characteristics
When the system is self-excited, the system often has a stable periodic solution near its equilibrium point [
17,
18]. To ensure the stability of the suspension control system, the above situation should be avoided [
19,
20,
21].
Based on the above system equation, by ignoring the disturbance
, the equilibrium point of the system is solved. Let
and the isolated equilibrium point of the system
P is
The Jacobian matrix of the system at the equilibrium point is [
22]
The characteristic equation of the matrix
A is
The Routh table of the characteristic equation is shown as
Table 1 [
22,
23].
According to the above Routh table, we can conclude the following:
(1) If the values of the first column of the Routh table are positive, namely
,
, all the characteristic roots of the matrix
A have negative real parts. That is, corresponding to the nonlinear system in Equation Group (5), the linear system at equilibrium point
P is stable [
22] .
At this point, the matrix
A has no pure virtual root, and the nonlinear system in Equation (
5) is derivable in the neighborhood of the point
P. The nonlinear system in Equation (
5) and its corresponding linear system in Equation (
7) in the equilibrium point
P have the same topological structure, namely the nonlinear system in Equation (
5) is also stable at the equilibrium point
P.
(2) It is obvious that
. When
or
, the matrix
A has a characteristic root with negative real part, and the other two are pure virtual roots. That is, the linear system in Equation (
7) is critical stable [
22].
At this point, the nonlinear system in Equation (
5) may exist the bifurcation with
.
In Case (2), the nonlinear system in Equation (
5) may appear stable periodic solution, namely may induce the stable self-excited vibration.
When , . As are constant, should also be constant. In fact, the control parameter is constantly changing, and it is quite a coincidence that the above equation is met. Thus, the main discussion is the case .
When , one of the characteristic roots of the matrix A is a negative real root, and the other two are pure virtual roots. Let us assume that this pair pure virtual root is , and the other negative real root is . Obviously, .
According to Equation Group (10), we solve
. If only
, we can get [
20,
22,
25]
Then, a Hopf bifurcation would occur at the point of the trust bearing system, which means that the system has the periodic solution at this point and a stable self-excited oscillation appears.
To achieve the stale suspension control and avoid the self-excited oscillation, according to
, we can also have
4. Design of the Adaptive Control Law
In the work process of the electromagnetic thrust bearing, the load mass changes very often. The inequality in Equation (
12) would not hold if
remains the same with the load mass variation, which will cause that the system may lose its stability or reach a critical steady state. Here, we design the adaptive controller parameters, that is the suitable selection of the suspension displacement coefficient
and the differential feedback coefficient
, to make the above inequality hold.
In practical engineering, to make the inequality in Equation (
12) exist, we let
In the above equation, the load mass
m is hard to measure directly. However, according to the previous analysis, at the isolated point
P of the system, we have
where
is the port voltage of the electromagnet at the equilibrium point. The port voltage
U of the electromagnet coil is easy to measure.The adaptive control law with variable load mass is designed as follows [
20,
22,
26]
where
is the velocity feedback coefficient of the equilibrium point.
5. Numerical Simulations
The system parameters of the thrust magnetic bearing system is given in
Table 2.
(1) Stable suspension
By choosing
, we can calculate
. Then, all the eigenvalues of the Jacobian matrix of the system have the negative real part, which means that the system can suspend stably without Hopf bifurcation and self oscillation. The suspension displacement curve with the above parameters is shown in
Figure 2.
Figure 3 shows that, with the above parameters, the suspension gap reaches the equilibrium position 0 mm in the 1 s time, and then suspends stably without self-excited vibration.
(2) Self-existed oscillation
By choosing
, we can calculate
. Therefore, the eigenvalues of the Jacobian matrix of the system has a pair of pure virtual root. The suspension displacement curve with the above parameters is shown in
Figure 3.
Figure 2 shows that, with the above parameters, the suspension gap curve is in the periodic oscillation state and the obvious self-excited vibration occurs, which is consistent with the previous simulation analysis.
Discussion 1. In
Figure 2 and
Figure 3, when control parameters are changed, we discuss whether the system is stable. In
Figure 2, the eigenvalues of the Jacobian matrix of the system have negative real part and the suspension displacement curve is convergent. While the control parameter kp is changed in
Figure 3, the eigenvalues of the Jacobian matrix of the system have pure virtual part. The suspension displacement curve is divergent.
(3) The control parameters remain the same while the load mass changes
When the load mass changes up to 60 kg, the displacement curve is shown in
Figure 4 while the control parameters remain the same.
As
Figure 4 shows, while the load mass suddenly changes, with the same control parameters, the suspension displacement would oscillate and the amplitude would increase gradually, and the system will lose the stability eventually.
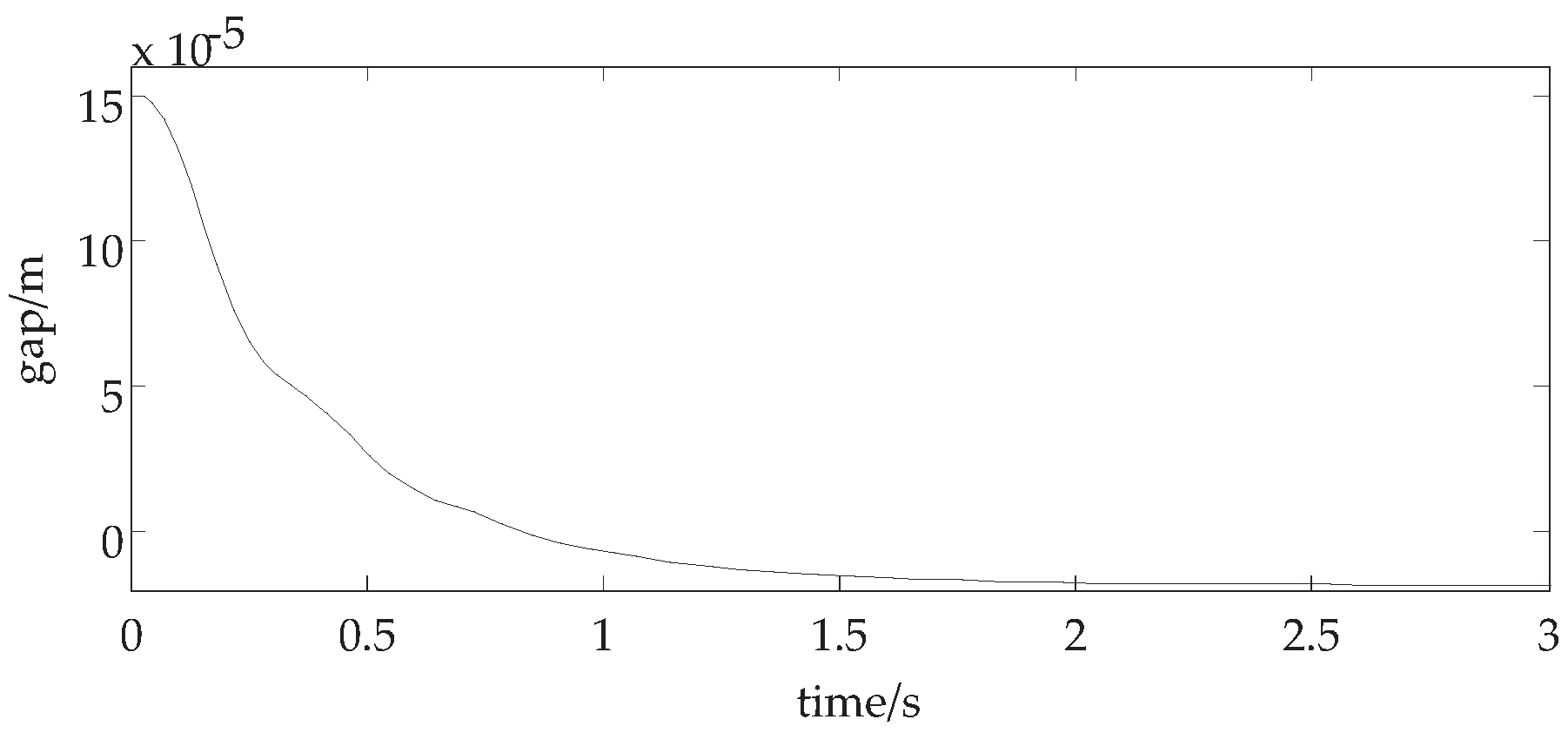
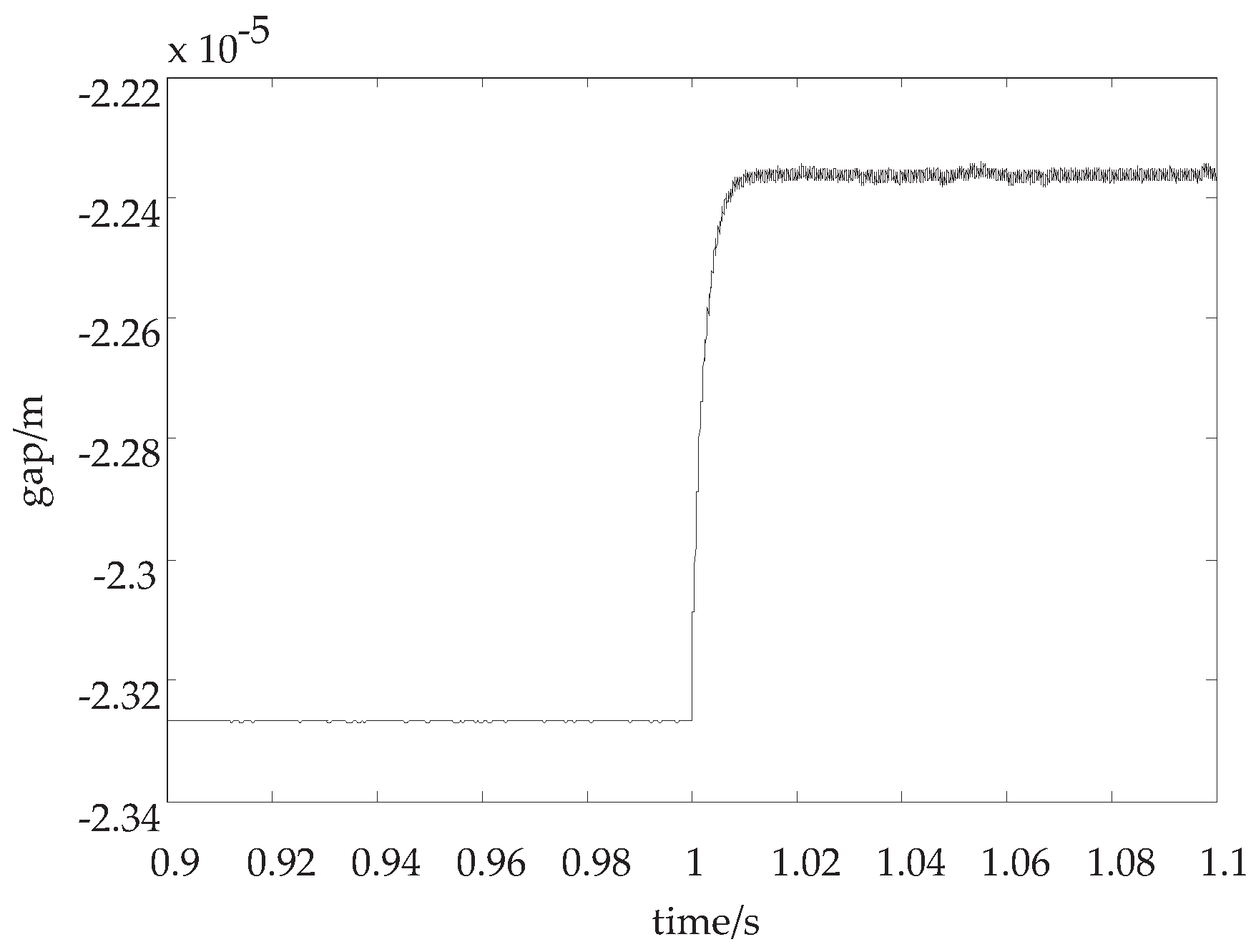
(4) Adopting the adaptive control law while the load mass changes
When he load mass changes up to 60 kg, the displacement curve of the system by adopting the adaptive control law is shown in
Figure 5.
In
Figure 5, when the suspension mass suddenly changes, the curve of the displacement gradually approaches the new equilibrium point, while it maintains a stable suspension state by adopting the adaptive control law.
Discussion 2. In
Figure 4 and
Figure 5, when the load mass is increased, we discuss whether the system is stable. In
Figure 4, the control parameters keep unchanged, so the suspension displacement curve is divergent. However, if the adaptive control law is adopted, the suspension displacement curve is convergent in
Figure 5.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}