Indoor Motion Detection Using Wi-Fi Channel State Information in Flat Floor Environments Versus in Staircase Environments


Abstract
:1. Introduction
- We present the difference in CSI motion detection in the two environments through a theoretical radio propagation model and experiments in real settings. The difference is analysed from the perspective of signal variance magnitude caused by the human movement direction.
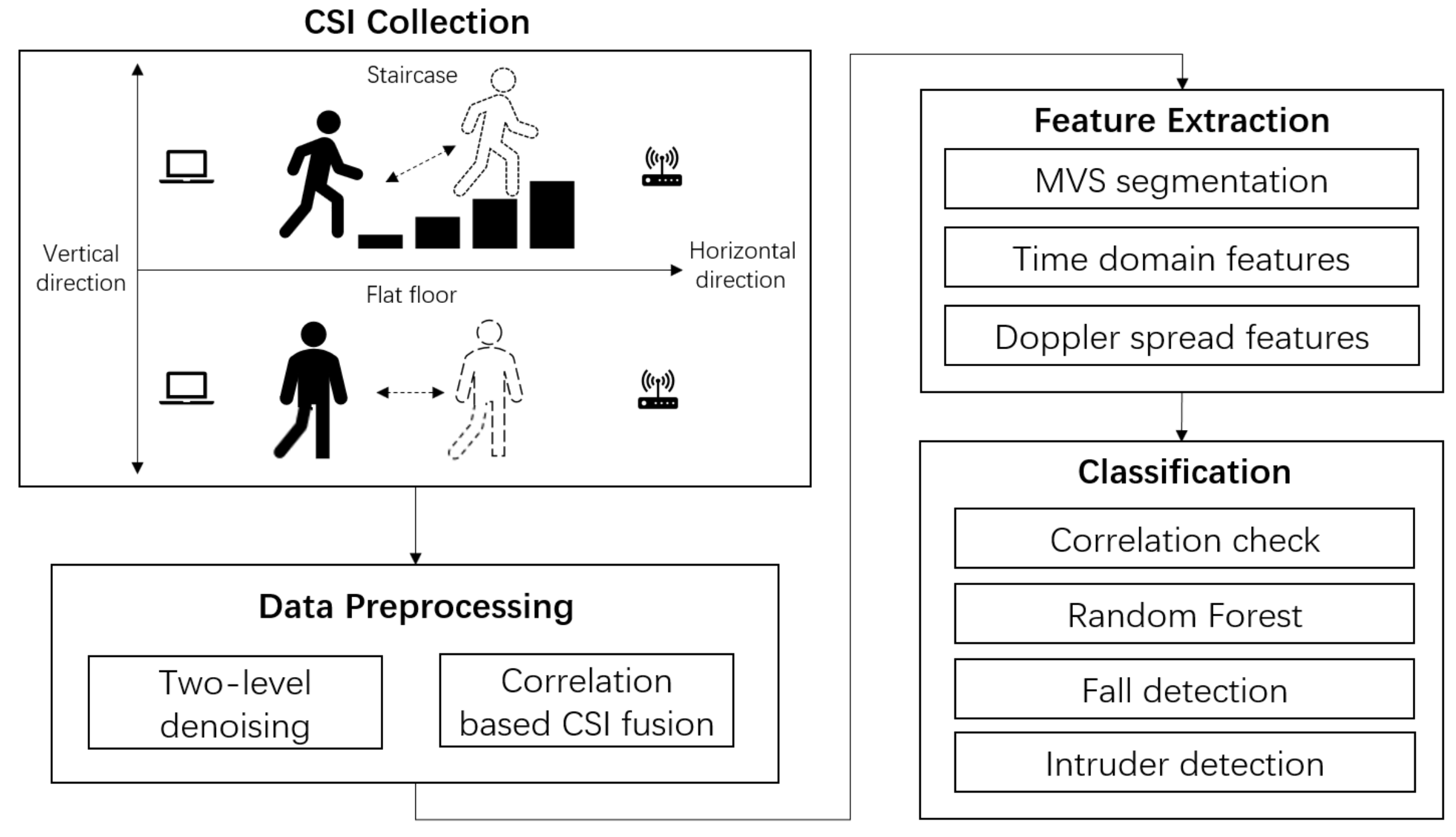
- For comparison in the two environments, we propose a new system with several novel methods including the correlation-based fusion, MVS segmentation and Doppler spread spectrum to improve the system performance, and a correlation check to reduce the implementation cost. The proposed system is first validated to have a better performance compared to existing systems, and further utilized to verify the superior performance of CSI motion detection in staircase environments versus flat floor environments.
- Experiments in a real setting also validate the efficiency of the random forest (RF) algorithm for CSI motion detection in the two environments compared with that of the support vector machine (SVM) and K-nearest neighbour (KNN) algorithms.
2. Related Work
3. Preliminaries
3.1. Differences in Motion Detection Scenarios in Flat Floor and Staircase Environments
3.2. Channel State Information
3.3. Energy Distribution on Frequency Components
4. Methodologies
4.1. Two-Level Denoising
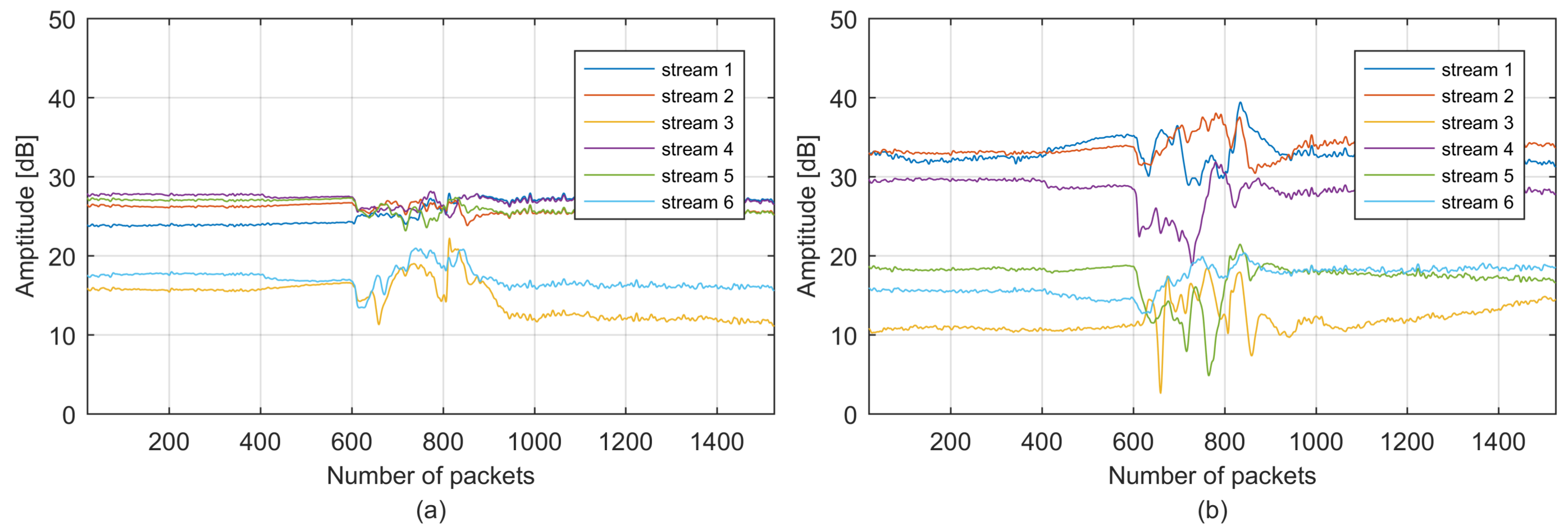
4.2. Correlation-Based CSI Data Fusion
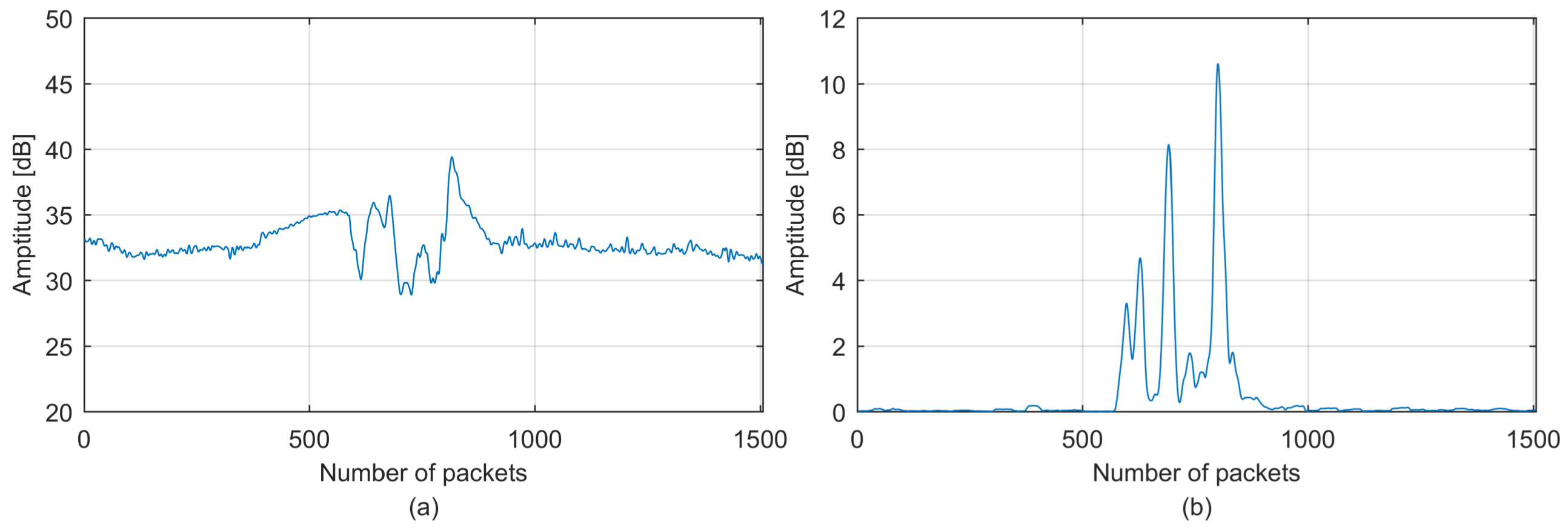
4.3. MVS Segmentation
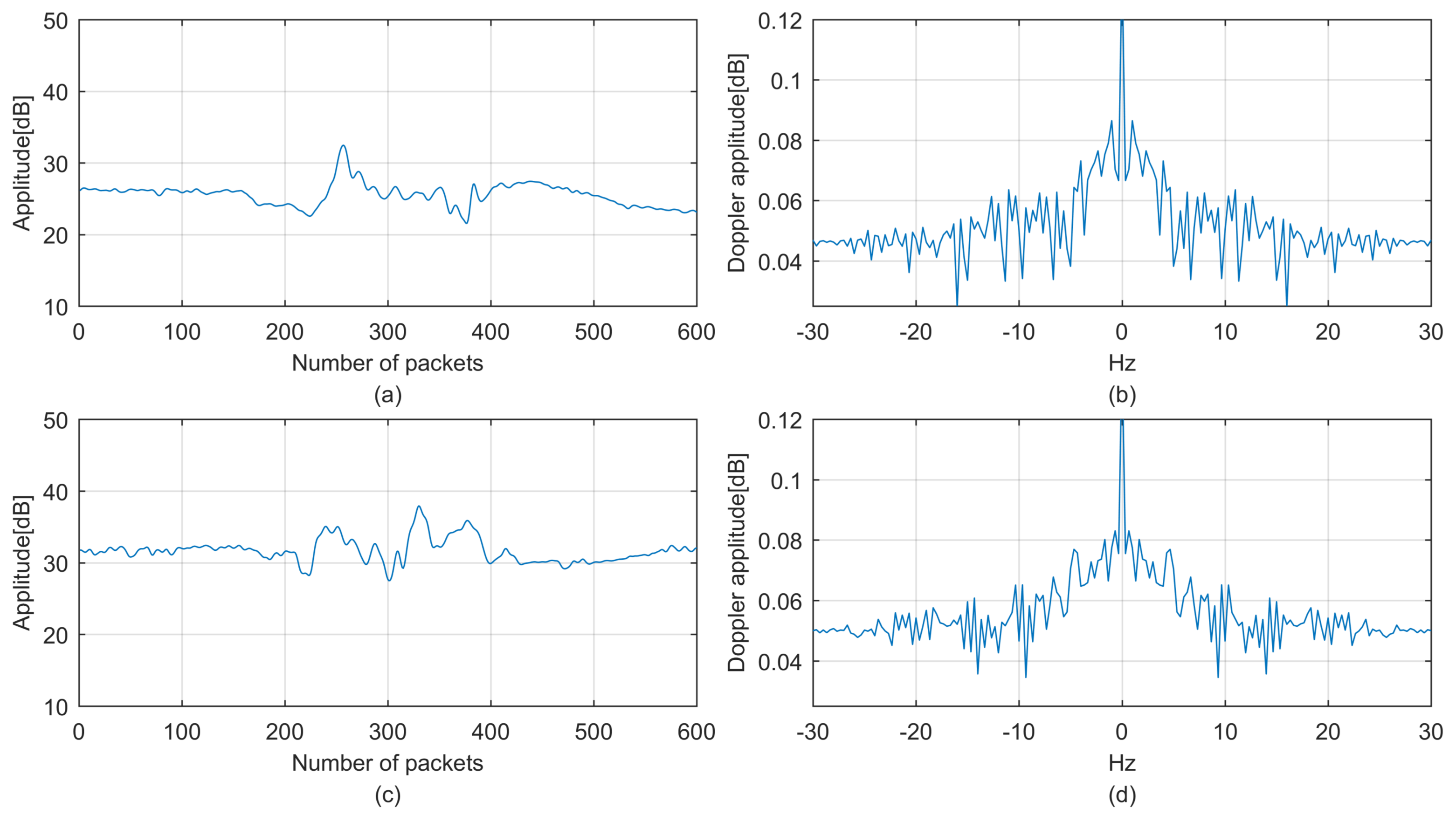
4.4. Feature Extraction
4.5. Correlation Check
5. Performance Comparison
5.1. Comparison Metrics
5.2. Comparison Scheme
5.3. Comparison of Data Fusion Methods
5.4. Comparison of Utilizing Selected Features
5.5. Comparison of Fall Detection Performance
5.6. Comparison of Intruder Detection Performance
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Cook, D.J.; Schmitter-Edgecombe, M.; Dawadi, P. Analyzing activity behavior and movement in a naturalistic environment using smart home techniques. IEEE J. Biomed. Health Inform. 2015, 19, 1882–1892. [Google Scholar] [CrossRef] [PubMed]
- Han, S.; Lee, S. A vision-based motion capture and recognition framework for behavior-based safety management. Autom. Constr. 2013, 35, 131–141. [Google Scholar] [CrossRef]
- Geng, Y.; Chen, J.; Fu, R.; Bao, G.; Pahlavan, K. Enlighten wearable physiological monitoring systems: On-body rf characteristics based human motion classification using a support vector machine. IEEE Trans. Mob. Comput. 2016, 15, 656–671. [Google Scholar] [CrossRef]
- Kim, S.C. Device-free activity recognition using CSI & big data analysis: A survey. In Proceedings of the 2017 Ninth International Conference on Ubiquitous and Future Networks (ICUFN), Milan, Italy, 4–7 July 2017; pp. 539–541. [Google Scholar]
- Wang, Y.; Wu, K.; Ni, L.M. Wifall: Device-free fall detection by wireless networks. IEEE Trans. Mob. Comput. 2017, 16, 581–594. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, D.; Wang, Y.; Ma, J.; Wang, Y.; Li, S. RT-Fall: A real-time and contactless fall detection system with commodity wifi devices. IEEE Trans. Mob. Comput. 2017, 16, 511–526. [Google Scholar] [CrossRef]
- Abdelnasser, H.; Youssef, M.; Harras, K.A. Wigest: A ubiquitous wifi-based gesture recognition system. In Proceedings of the 2015 IEEE Conference on Computer Communications (INFOCOM), Hong Kong, China, 26 April–1 May 2015; pp. 1472–1480. [Google Scholar]
- Wang, G.; Zou, Y.; Zhou, Z.; Wu, K.; Ni, L.M. We can hear you with wi-fi! IEEE Trans. Mob. Comput. 2016, 15, 2907–2920. [Google Scholar] [CrossRef]
- Wang, W.; Liu, A.X.; Shahzad, M. Gait recognition using wifi signals. In Proceedings of the 2016 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Heidelberg, Germany, 12–16 September 2016; pp. 363–373. [Google Scholar]
- Chen, Y.; Dong, W.; Gao, Y.; Liu, X.; Gu, T. Rapid: A Multimodal and Device-free Approach Using Noise Estimation for Robust Person Identification. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2017, 1, 41. [Google Scholar] [CrossRef]
- Wu, C.; Yang, Z.; Zhou, Z.; Liu, X.; Liu, Y.; Cao, J. Non-invasive detection of moving and stationary human with wifi. IEEE J. Sel. Areas Commun. 2015, 33, 2329–2342. [Google Scholar] [CrossRef]
- Zhu, D.; Pang, N.; Feng, W.; Al-Khiza’ay, M.; Ma, Y. Device-Free Intruder Sensing Leveraging Fine-Grained Physical Layer Signatures. In Proceedings of the International Conference on Knowledge Science, Engineering and Management; Springer: Berlin, Germany, 2017; pp. 183–194. [Google Scholar]
- Wang, X.; Gao, L.; Mao, S.; Pandey, S. CSI-based fingerprinting for indoor localization: A deep learning approach. IEEE Trans. Veh. Technol. 2017, 66, 763–776. [Google Scholar] [CrossRef]
- Wang, J.; Xiong, J.; Jiang, H.; Jamieson, K.; Chen, X.; Fang, D.; Wang, C. Low Human-Effort, Device-Free Localization with Fine-Grained Subcarrier Information. IEEE Trans. Mob. Comput. 2018. [Google Scholar] [CrossRef]
- Liu, H.; Wang, Y.; Liu, J.; Yang, J.; Chen, Y.; Poor, H.V. Authenticating Users through Fine-Grained Channel Information. IEEE Trans. Mob. Comput. 2018, 17, 251–264. [Google Scholar] [CrossRef]
- Galna, B.; Barry, G.; Jackson, D.; Mhiripiri, D.; Olivier, P.; Rochester, L. Accuracy of the Microsoft Kinect sensor for measuring movement in people with Parkinson’s disease. Gait Posture 2014, 39, 1062–1068. [Google Scholar] [CrossRef] [PubMed]
- Dhakar, L.; Pitchappa, P.; Tay, F.E.H.; Lee, C. An intelligent skin based self-powered finger motion sensor integrated with triboelectric nanogenerator. Nano Energy 2016, 19, 532–540. [Google Scholar] [CrossRef]
- Stone, E.E.; Skubic, M. Fall detection in homes of older adults using the Microsoft Kinect. IEEE J. Biomed. Health Inform. 2015, 19, 290–301. [Google Scholar] [CrossRef] [PubMed]
- Mastorakis, G.; Makris, D. Fall detection system using Kinect’s infrared sensor. J. Real-Time Image Process. 2014, 9, 635–646. [Google Scholar] [CrossRef]
- Poppe, R. A survey on vision-based human action recognition. Image Vision Comput. 2010, 28, 976–990. [Google Scholar] [CrossRef]
- Rautaray, S.S.; Agrawal, A. Vision based hand gesture recognition for human computer interaction: A survey. Artif. Intell. Rev. 2015, 43, 1–54. [Google Scholar] [CrossRef]
- Li, C.; Lubecke, V.M.; Boric-Lubecke, O.; Lin, J. A review on recent advances in Doppler radar sensors for noncontact healthcare monitoring. IEEE Trans. Microw. Theory Tech. 2013, 61, 2046–2060. [Google Scholar] [CrossRef]
- Liu, L.; Popescu, M.; Skubic, M.; Rantz, M.; Yardibi, T.; Cuddihy, P. Automatic fall detection based on Doppler radar motion signature. In Proceedings of the 5th International Conference on Pervasive Computing Technologies for Healthcare (PervasiveHealth) and Workshops, New York, NY, USA, 23–26 May 2011; pp. 222–225. [Google Scholar]
- Kim, Y.; Ha, S.; Kwon, J. Human detection using Doppler radar based on physical characteristics of targets. IEEE Geosci. Remote Sens. Lett. 2015, 12, 289–293. [Google Scholar]
- Jokanovic, B.; Amin, M.; Ahmad, F. Radar fall motion detection using deep learning. In Proceedings of the 2016 Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016; pp. 1–6. [Google Scholar]
- Yan, J.; Zhao, H.; Li, Y.; Sun, L.; Hong, H.; Zhu, X. Through-the-wall human respiration detection using impulse ultra-wide-band radar. In Proceedings of the 2016 IEEE Topical Conference on Biomedical Wireless Technologies, Networks, and Sensing Systems (BioWireleSS), Austin, TX, USA, 24–27 January 2016; pp. 94–96. [Google Scholar]
- Zhong, Y.; Yang, Y.; Zhu, X.; Dutkiewicz, E.; Zhou, Z.; Jiang, T. Device-Free Sensing for Personnel Detection in a Foliage Environment. IEEE Geosci. Remote Sens. Lett. 2017, 14, 921–925. [Google Scholar] [CrossRef]
- Wang, W.; Liu, A.X.; Shahzad, M.; Ling, K.; Lu, S. Device-Free Human Activity Recognition Using Commercial WiFi Devices. IEEE J. Sel. Areas Commun. 2017, 35, 1118–1131. [Google Scholar] [CrossRef]
- Zhou, Z.; Yang, Z.; Wu, C.; Shangguan, L.; Liu, Y. Omnidirectional coverage for device-free passive human detection. IEEE Trans. Parallel Distrib. Syst. 2014, 25, 1819–1829. [Google Scholar] [CrossRef]
- Zeng, Y.; Pathak, P.H.; Mohapatra, P. WiWho: wifi-based person identification in smart spaces. In Proceedings of the 15th International Conference on Information Processing in Sensor Networks, Vienna, Austria, 12–14 April 2016; IEEE Press: Piscataway, NJ, USA; p. 4. [Google Scholar]
- Yang, Z.; Zhou, Z.; Liu, Y. From RSSI to CSI: Indoor localization via channel response. ACM Comput. Surv. (CSUR) 2013, 46, 25. [Google Scholar] [CrossRef]
- Goldsmith, A. Wireless Communications; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Halperin, D.; Hu, W.; Sheth, A.; Wetherall, D. Tool release: Gathering 802.11 n traces with channel state information. ACM SIGCOMM Comput. Commun. Rev. 2011, 41, 53–53. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, J.; Chen, Y.; Gruteser, M.; Yang, J.; Liu, H. E-eyes: device-free location-oriented activity identification using fine-grained wifi signatures. In Proceedings of the 20th Annual International Conference on Mobile Computing and Networking, Maui, HI, USA, 7–11 September 2014; pp. 617–628. [Google Scholar]
- Gu, Y.; Zhan, J.; Ji, Y.; Li, J.; Ren, F.; Gao, S. MoSense: A RF-based Motion Detection System via Off-the-Shelf WiFi Devices. IEEE IoT J. 2017. [Google Scholar] [CrossRef]
- Viani, F.; Polo, A.; Giarola, E.; Salucci, M.; Massa, A. Principal component analysis of CSI for the robust wireless detection of passive targets. In Proceedings of the 2017 International Applied Computational Electromagnetics Society Symposium-Italy (ACES), Florence, Italy, 26–30 March 2017; pp. 1–2. [Google Scholar]
- Kwolek, B.; Kepski, M. Improving fall detection by the use of depth sensor and accelerometer. Neurocomputing 2015, 168, 637–645. [Google Scholar] [CrossRef]
Sample Availability: Samples of the compounds are available from the authors. |













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| STD | IR | SSE | MAD | PtP | TD | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| STD | 1 | 0.873 | 0.263 | 0.981 | 0.872 | 0.189 | 0.293 | 0.114 | 0.264 | 0.254 |
| IR | 1 | 0.325 | 0.926 | 0.635 | 0.189 | 0.364 | 0.072 | 0.315 | 0.298 | |
| SSE | 1 | 0.294 | 0.067 | 0.141 | 0.996 | 0.336 | 0.607 | 0.885 | ||
| MAD | 1 | 0.797 | 0.199 | 0.328 | 0.110 | 0.295 | 0.273 | |||
| PtP | 1 | 0.191 | 0.086 | 0.136 | 0.127 | 0.095 | ||||
| TD | 1 | 0.143 | 0.093 | 0.058 | 0.143 | |||||
| 1 | 0.309 | 0.588 | 0.869 | |||||||
| 1 | 0.237 | 0.429 | ||||||||
| 1 | 0.752 | |||||||||
| 1 |
| Predicted Target | Predicted Other | |
|---|---|---|
| Actual Target | True Positive (TP) | False Negative (FN) |
| Actual Other | False Positive (FP) | True Negative (TN) |
| Scenarios | Flat Floor | Staircase | |
|---|---|---|---|
| Room | Corridor | ||
| Candidate motions | Walking | Walking | Walking |
| Sitting | Sitting | Sitting | |
| Running | Running | Running | |
| Falling | Falling | Falling | |
| Number of Features | Combinations of Selected Features | Classification Rate (%) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| MAD | IR | SSE | STD | PtP | TD | ||||||
| 3 | × | × | × | 25.3% | |||||||
| 4 | × | × | × | × | 32.9% | ||||||
| 5 | × | × | × | × | × | 40.2% | |||||
| 6 | × | × | × | × | × | × | 56.7% | ||||
| 7 | × | × | × | × | × | × | × | 68.4% | |||
| 8 | × | × | × | × | × | × | × | × | 89.8% | ||
| 9 | × | × | × | × | × | × | × | × | × | 90.4% | |
| 10 | × | × | × | × | × | × | × | × | × | × | 90.6% |
| Flat Floor | Actual | ||||
|---|---|---|---|---|---|
| Environment | Falling | Running | Walking | Sitting | |
| Predicted | Falling | 92% | 1% | 2% | 5% |
| Running | 1% | 90% | 6% | 2% | |
| Walking | 3% | 7% | 89% | 1% | |
| Sitting | 7% | 0% | 2% | 91% | |
| Staircase | Actual | ||||
| Environment | Falling | Running | Walking | Sitting | |
| Predicted | Falling | 94% | 0% | 2% | 3% |
| Running | 1% | 93% | 6% | 0% | |
| Walking | 0% | 4% | 93% | 3% | |
| Sitting | 5% | 0% | 1% | 94% | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, Z.; Li, F.; Ying, J.; Pahlavan, K. Indoor Motion Detection Using Wi-Fi Channel State Information in Flat Floor Environments Versus in Staircase Environments. Sensors 2018, 18, 2177. https://doi.org/10.3390/s18072177
Dong Z, Li F, Ying J, Pahlavan K. Indoor Motion Detection Using Wi-Fi Channel State Information in Flat Floor Environments Versus in Staircase Environments. Sensors. 2018; 18(7):2177. https://doi.org/10.3390/s18072177
Chicago/Turabian StyleDong, Zehua, Fangmin Li, Julang Ying, and Kaveh Pahlavan. 2018. "Indoor Motion Detection Using Wi-Fi Channel State Information in Flat Floor Environments Versus in Staircase Environments" Sensors 18, no. 7: 2177. https://doi.org/10.3390/s18072177
APA StyleDong, Z., Li, F., Ying, J., & Pahlavan, K. (2018). Indoor Motion Detection Using Wi-Fi Channel State Information in Flat Floor Environments Versus in Staircase Environments. Sensors, 18(7), 2177. https://doi.org/10.3390/s18072177