Systematic Experimental Assessment of a 2D-Motion Sensor to Detect Relative Movement between Residual Limb and Prosthetic Socket



Abstract
:1. Introduction
2. The Sensor System
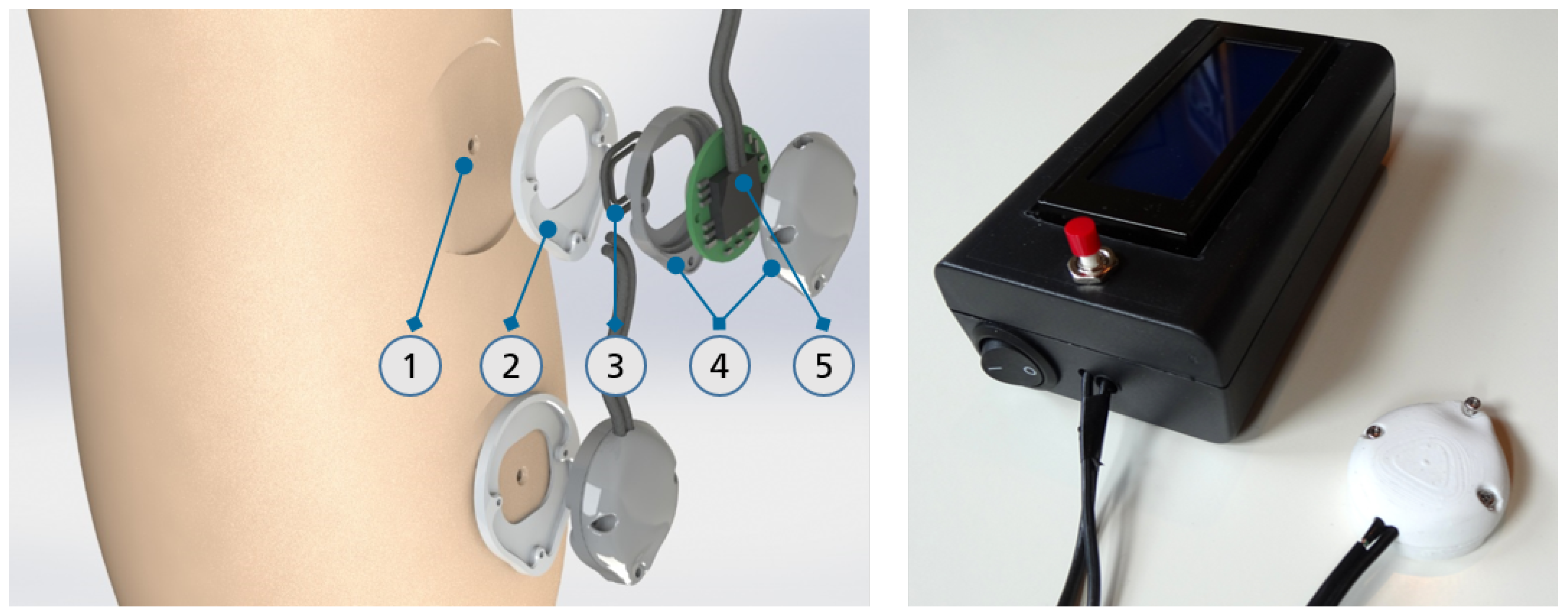
2.1. Sensor System Design and Implementation
2.2. Sensor Unit Specifications
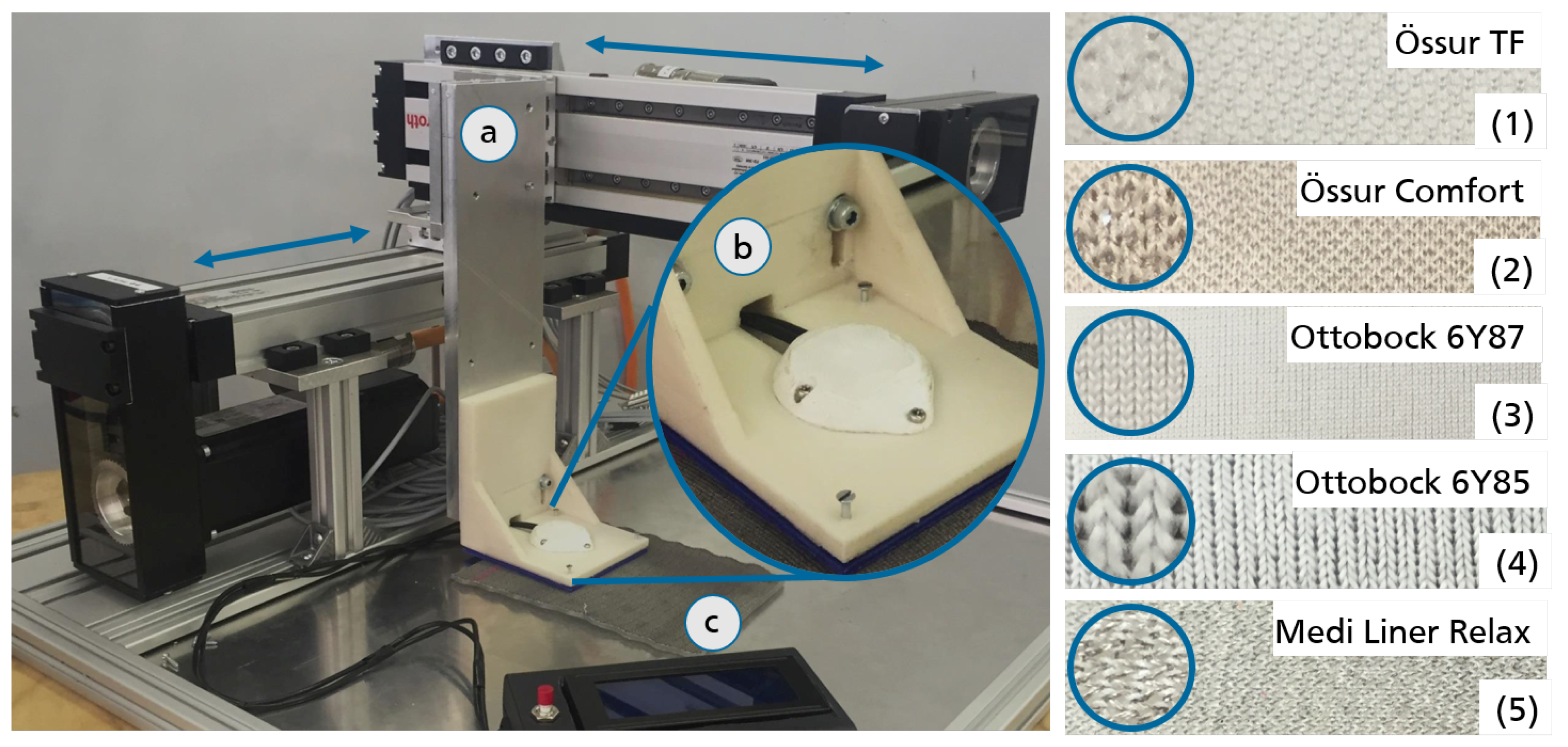
3. Experimental Evaluation on a Test Rig
3.1. Methodology
3.2. Trial Session 1: Sensor-Liner Configuration and Sensor Settings
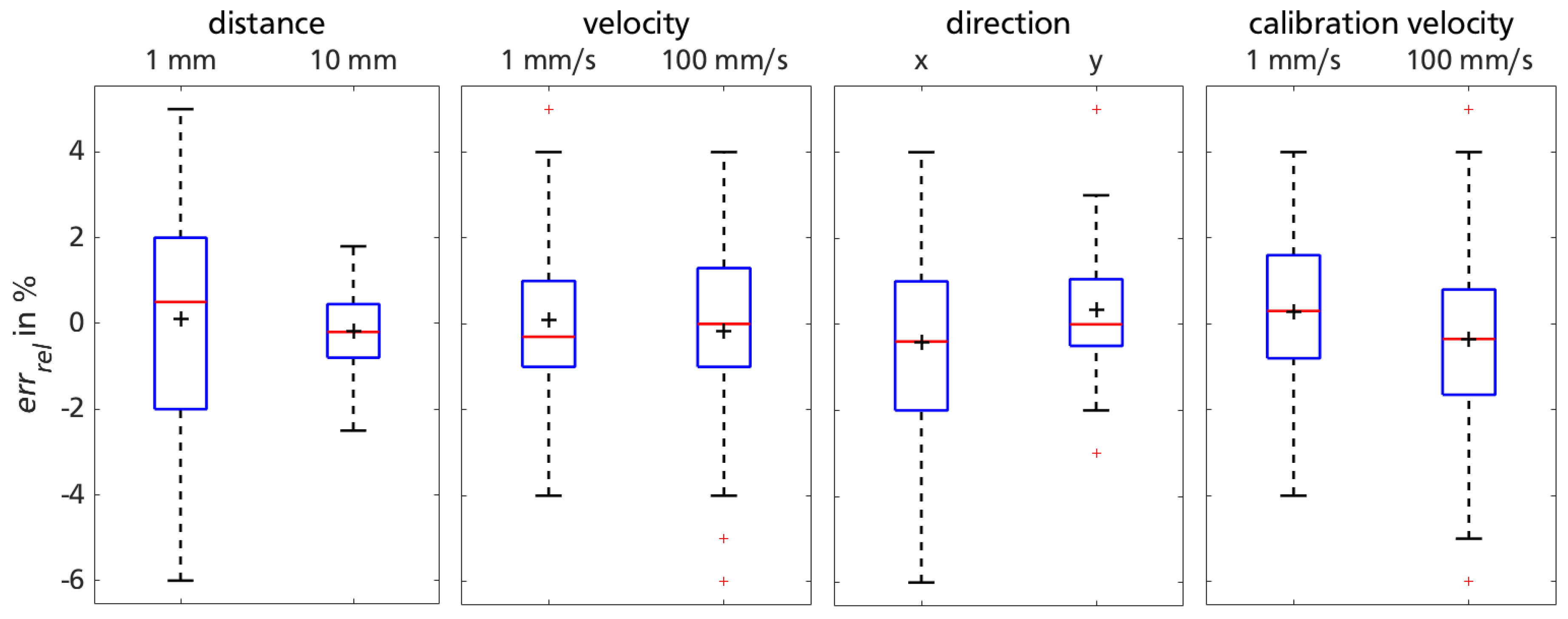
3.2.1. Results and Discussion
3.2.2. Implication
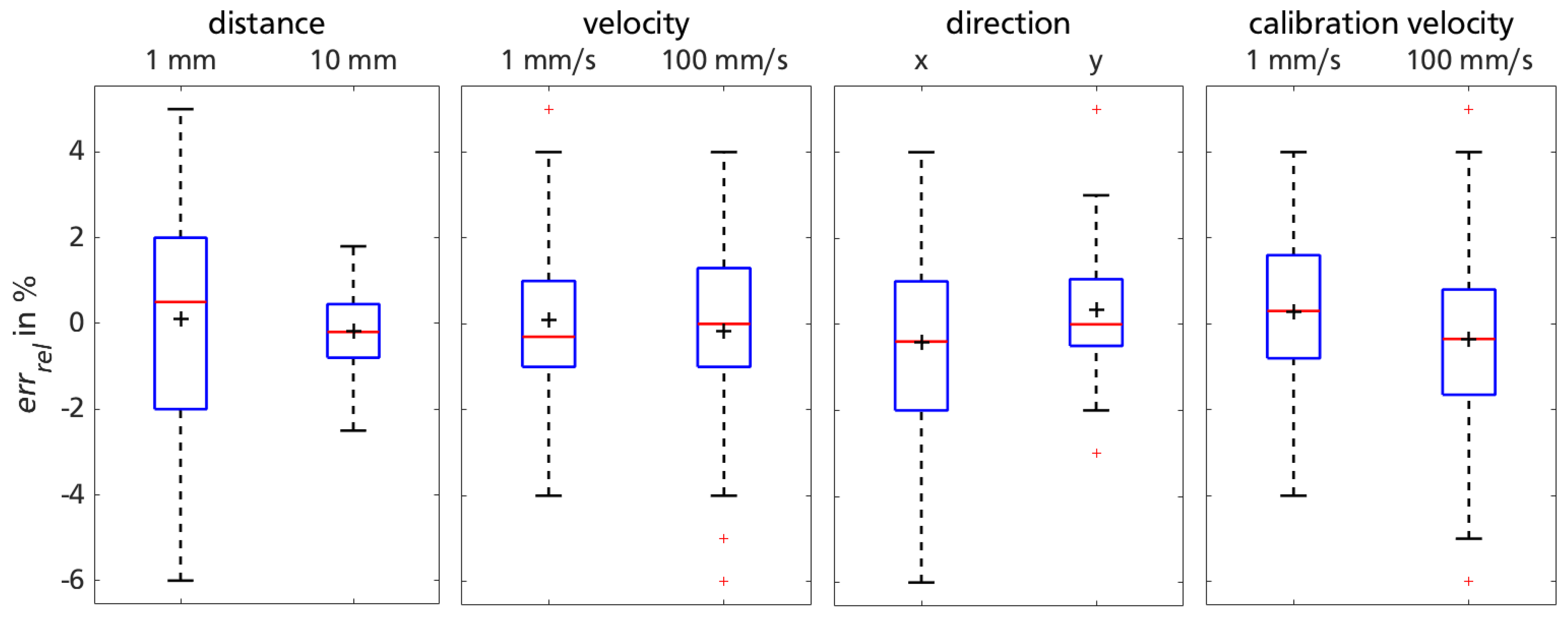
3.3. Trial Session 2: Measuring Distance and Cavity Diameter Variations
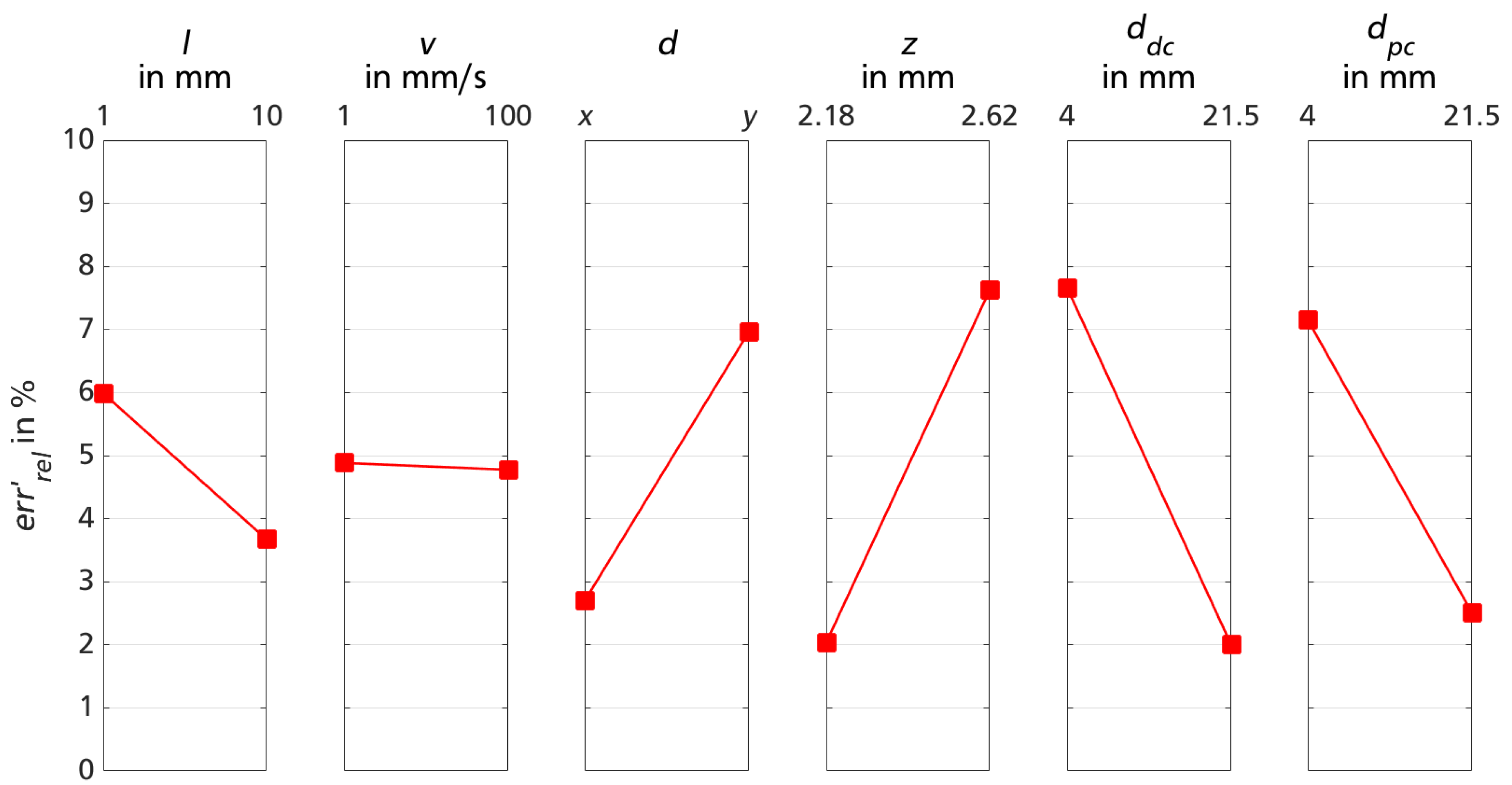
3.3.1. Results and Discussion
3.3.2. Implication
3.4. Conclusion
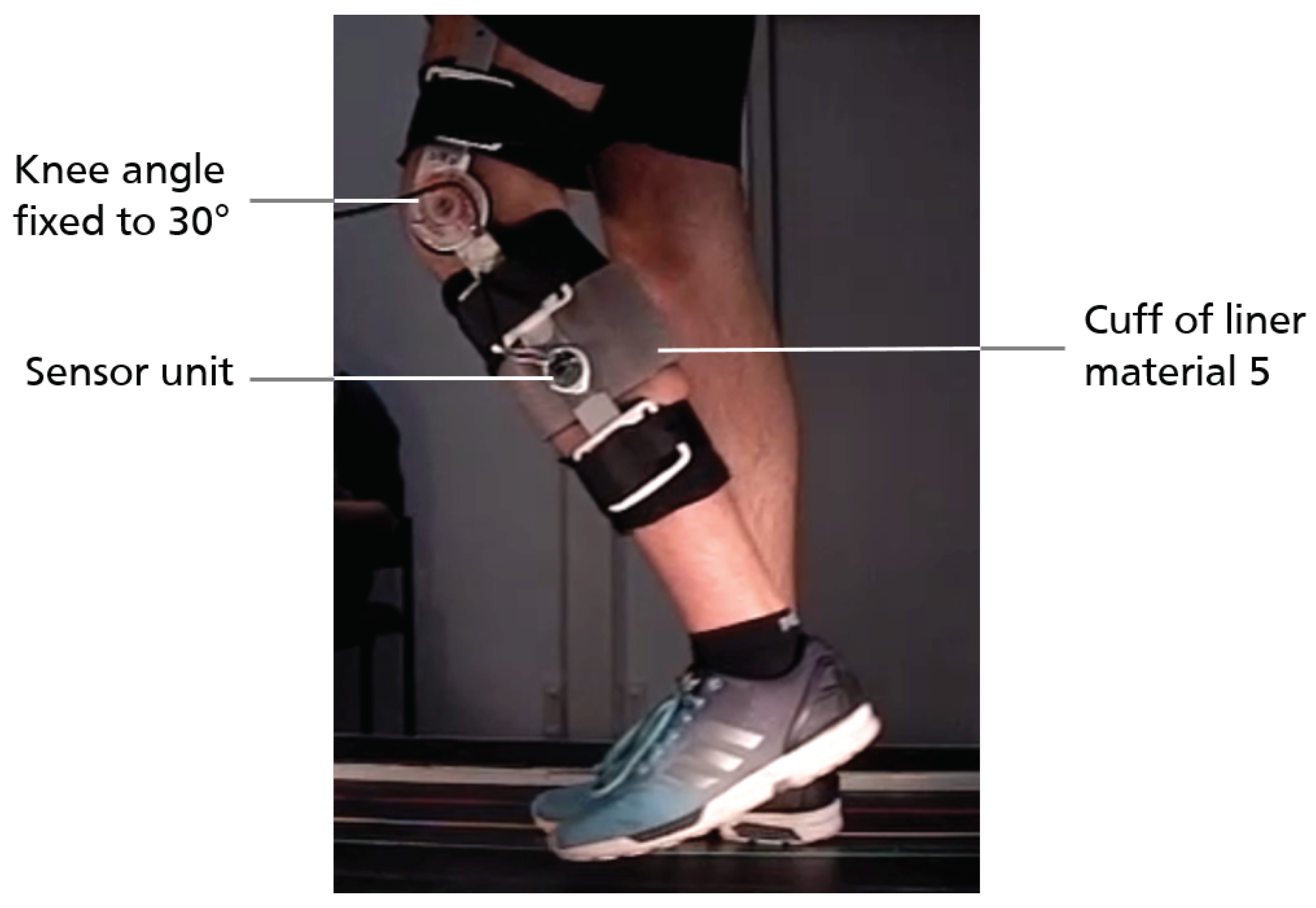
4. Experimental Evaluation during Gait Using an Orthosis
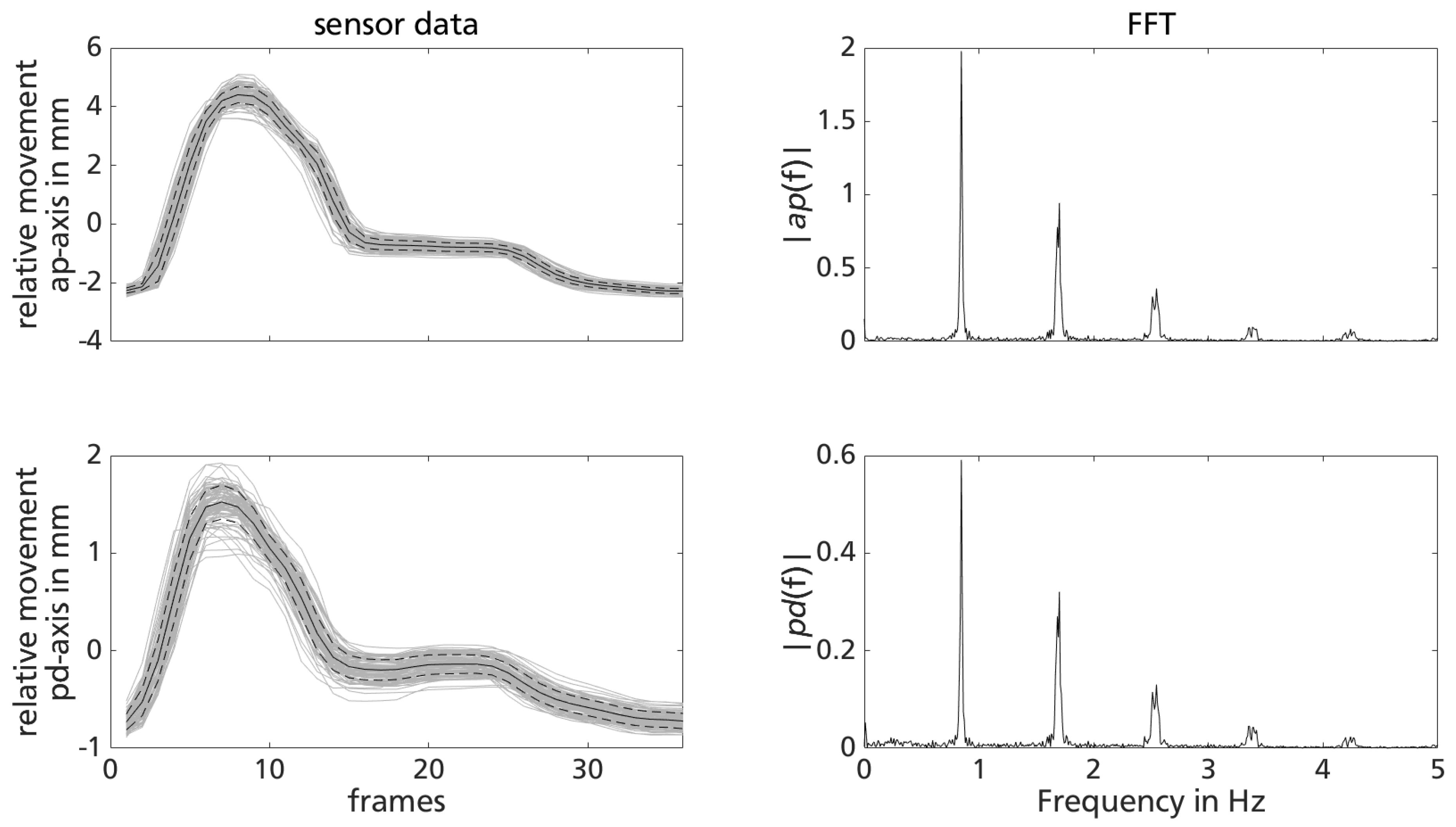
4.1. Unloaded Knee Bends
4.1.1. Methodology
4.1.2. Results and Discussion
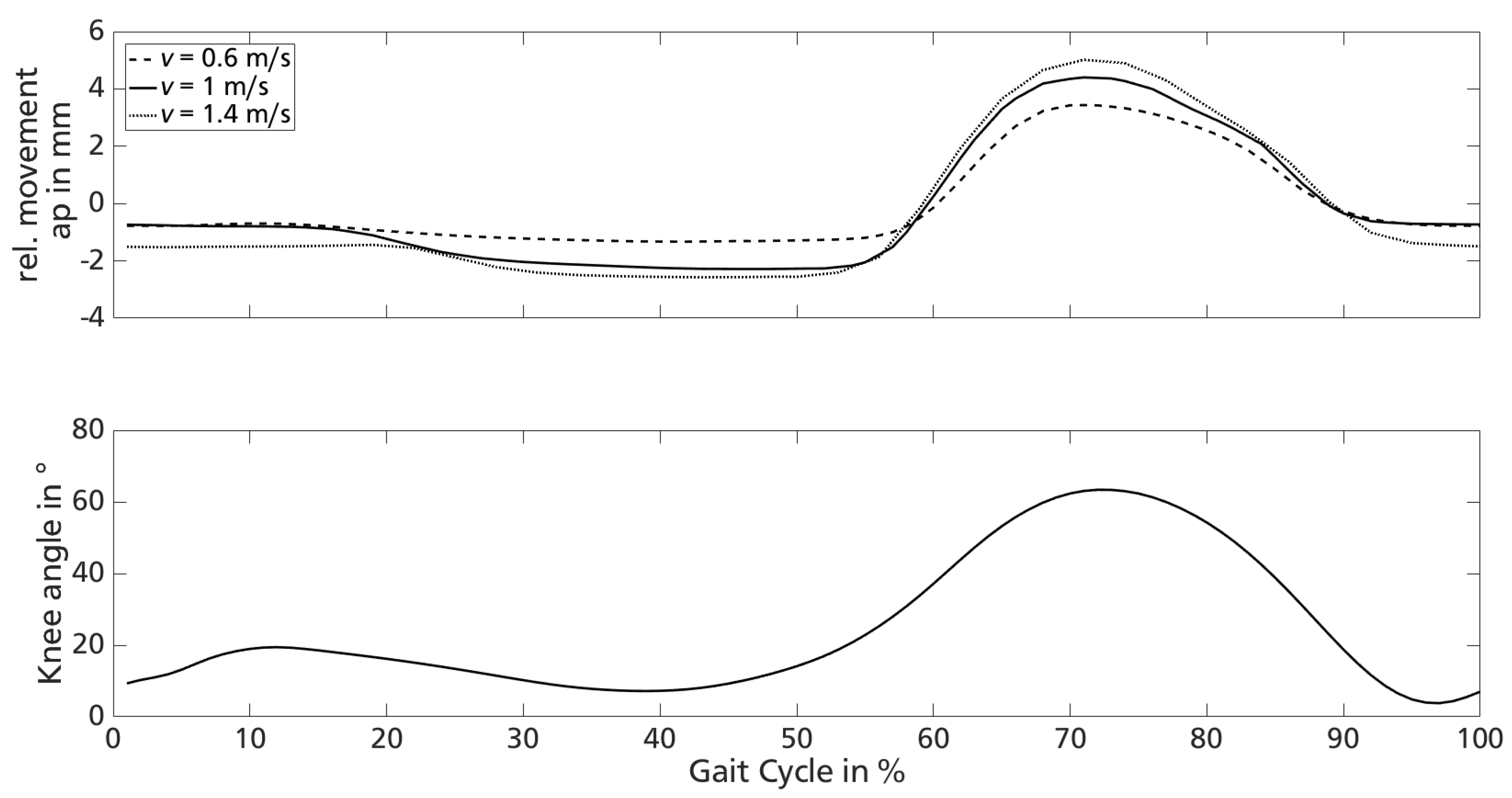
4.2. Treadmill Gait
4.2.1. Methodology
4.2.2. Results and Discussion
4.3. Implication
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Abbreviations
| SPI | Serial Peripheral Interface |
| PLA | Polylactide |
| USB | Universal Serial Bus |
| CMOS | Complementary metal-oxide-semiconductor |
| pd | proximodistal |
| ap | anteroposterior |
| spr | scaled paper reading |
| sd | sensor data |
| FFT | Fast Fourrier Transformation |
References
- Wetz, H.H.; Hafkemeyer, U.; Drerup, B. Einfluss des C-Leg-Kniegelenk-Passteiles der Fa. Otto Bock auf die Versorgungsqualität Oberschenkelamputierter. Orthopade 2005, 34, 298–319. [Google Scholar] [CrossRef] [PubMed]
- Berry, D. Microprocessor prosthetic knees. Phys. Med. Rehabil. Clin. 2006, 17, 91–113. [Google Scholar] [CrossRef] [PubMed]
- Colombo, G.; Filippi, S.; Rizzi, C.; Rotini, F. A new design paradigm for the development of custom-fit soft sockets for lower limb prostheses. Soft Prod. Dev. 2010, 61, 513–523. [Google Scholar] [CrossRef]
- Mak, A.F.; Zhang, M.; Boone, D.A. State-of-the-art research in lower-limb prosthetic biomechanics-socket interface: A review. J. Rehabil. Res. Dev. 2001, 38, 161–173. [Google Scholar] [PubMed]
- Klasson, B. Appreciation of Prosthetic Socket Fitting from Basic Engineering Principles; National Centre for Training and Education in Prosthetics and Orthotics: Glasgow, UK, 1995. [Google Scholar]
- Street, G. Vacuum suspension and its effects on the limb. Orthop. Tech. 2006, 4, 1–7. [Google Scholar]
- Meulenbelt, H.E.J.; Geertzen, J.H.B.; Dijkstra, P.U.; Jonkman, M.F. Skin problems in lower limb amputees: An overview by case reports. J. Eur. Acad. Dermatol. Venereol. 2007, 21, 147–155. [Google Scholar] [CrossRef] [PubMed]
- Erikson, U.; Lemperg, R. Roentgenological study of movements of the amputation stump within the prosthesis socket in below-knee amputees fitted with a PTB prosthesis. Acta Orthop. 1969, 40, 520–526. [Google Scholar] [CrossRef]
- Grevsten, S.; Erikson, U. A Roentgenological Study of the Stump-Socket Contact and Skeletal Displacement in the PTB-Suction Prosthesis. Upsala J. Med. Sci. 1975, 80, 49–57. [Google Scholar] [CrossRef] [PubMed]
- Lilja, M.; Johansson, T.; Öberg, T. Movement of the tibial end in a PTB prosthesis socket: A sagittal X-ray study of the PTB prosthesis. Prosthet. Orthot. Int. 1993, 17, 21–26. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Commean, P.K.; Smith, K.E.; Vannier, M.W. Lower extremity residual limb slippage within the prosthesis. Arch. Phys. Med. Rehabil. 1997, 78, 476–485. [Google Scholar] [CrossRef]
- Board, W.J.; Street, G.M.; Caspers, C. A comparison of trans-tibial amputee suction and vacuum socket conditions. Prosthet. Orthot. Int. 2001, 25, 202–209. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Irwin, G.A.; Friedman, L.; Shapiro, D. Prosthetic fit in below-knee amputation: Evaluation with xeroradiography. Am. J. Roentgenol. 1987, 148, 99–101. [Google Scholar] [CrossRef] [PubMed]
- Narita, H.; Yokogushi, K.; Shi, S.; Kakizawa, M.; Nosaka, T. Suspension effect and dynamic evaluation of the total surface bearing (TSB) trans-tibial prosthesis: A comparison with the patellar tendon bearing (PTB) trans-tibial prosthesis. Prosthet. Orthot. Int. 1997, 21, 175–178. [Google Scholar] [CrossRef] [PubMed]
- Zhang, M.; Turner-Smith, A.; Tanner, A.; Roberts, V. Clinical investigation of the pressure and shear stress on the trans-tibial stump with a prosthesis. Med. Eng. Phys. 1998, 20, 188–198. [Google Scholar] [CrossRef]
- Sabolich, J. Contoured adducted trochantericcontrolled alignment method (CAT-CAM): introduction and basic principles. Clin. Prosthet. Orthot. 1985, 9, 15–26. [Google Scholar]
- Convery, P.; Murray, K.D. Ultrasound study of the motion of the residual femur within a trans-femoral socket during gait. Prosthet. Orthot. Int. 2000, 24, 226–232. [Google Scholar] [CrossRef] [PubMed]
- Convery, P.; Murray, K.D. Ultrasound study of the motion of the residual femur within a transfemoral socket during daily living activities other than gait. Prosthet. Orthot. Int. 2001, 25, 220–227. [Google Scholar] [CrossRef] [PubMed]
- Murray, K.D.; Convery, P. The calibration of ultrasound transducers used to monitor motion of the residual femur within a transfemoral socket during gait. Prosthet. Orthot. Int. 2000, 24, 55–62. [Google Scholar] [CrossRef] [PubMed]
- Noll, V.; Wojtusch, J.; Schuy, J.; Grimmer, M.; Beckerle, P.; Rinderknecht, S. Measurement of biomechanical interactions at the stump-socket interface in lower limb prostheses. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 5517–5520. [Google Scholar] [CrossRef]
- Tang, J.; McGrath, M.; Laszczak, P.; Jiang, L.; Bader, D.L.; Moser, D.; Zahedi, S. Characterisation of dynamic couplings at lower limb residuum/socket interface using 3D motion capture. Med. Eng. Phys. 2015, 37, 1162–1168. [Google Scholar] [CrossRef] [PubMed]
- Childers, W.L.; Siebert, S. Marker-based method to measure movement between the residual limb and a transtibial prosthetic socket. Prosthet. Orthot. Int. 2016, 40, 720–728. [Google Scholar] [CrossRef] [PubMed]
- Appoldt, F.; Bennett, L.; Contini, R. The results of slip measurements in above-knee suction sockets. Bull. Prosthet. Res. 1968, 3, 106–112. [Google Scholar]
- Sanders, J.E.; Karchin, A.; Fergason, J.R.; Sorenson, E.A. A noncontact sensor for measurement of distal residual-limb position during walking. J. Rehabil. Res. Dev. 2006, 43, 509. [Google Scholar] [CrossRef] [PubMed]
- Gholizadeh, H.; Abu Osman, N.A.; Lúvíksdóttir, Á.G.; Eshraghi, A.; Kamyab, M.; Wan Abas, W.A.B. A new approach for the pistoning measurement in transtibial prosthesis. Prosthet. Orthot. Int. 2011, 35, 360–364. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gholizadeh, H.; Osman, N.A.A.; Kamyab, M.; Eshraghi, A.; Wan Abas, W.A.B.; Azam, M.N. Transtibial prosthetic socket pistoning: Static evaluation of Seal-In® X5 and Dermo® Liner using motion analysis system. Clin. Biomech. 2012, 27, 34–39. [Google Scholar] [CrossRef] [PubMed]
- Gerschutz, M.J.; Hayne, M.L.; Colvin, J.M.; Denune, J.A. Dynamic Effectiveness Evaluation of Elevated Vacuum Suspension. JPO J. Prosthet. Orthot. 2015, 27, 161–165. [Google Scholar] [CrossRef]
- Wernke, M.M.; Schroeder, R.M.; Haynes, M.L.; Nolt, L.L.; Albury, A.W.; Colvin, J.M. Progress Toward Optimizing Prosthetic Socket Fit and Suspension Using Elevated Vacuum to Promote Residual Limb Health. Adv. Wound Care 2017, 6, 233–239. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Noll, V.; Weber, P.; Scortecci, S.; Beckerle, P.; Rinderknecht, S. A sensor to acquire the relative movement between residual limb and prosthetic socket. In Proceedings of the 2016 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Budapest, Hungary, 9–12 October 2016. [Google Scholar] [CrossRef]
- Ng, T.W.; Ang, K.T. The optical mouse for vibratory motion sensing. Sens. Actuators A Phys. 2004, 116, 205–208. [Google Scholar] [CrossRef]
- Ng, T.W.; Cheong, T.L. The optical mouse as an inexpensive region-of-interest position recorder in optical microscopy. Microsc. Res. Tech. 2004, 63, 203–205. [Google Scholar] [CrossRef] [PubMed]
- Ng, T.W.; Ang, K.T. The optical mouse for harmonic oscillator experimentation. Am. J. Phys. 2005, 73, 793–795. [Google Scholar] [CrossRef]
- Palacin, J.; Valganon, I.; Pernia, R. The optical mouse for indoor mobile robot odometry measurement. Sens. Actuators A Phys. 2006, 126, 141–147. [Google Scholar] [CrossRef]
- Lott, G.K.; Rosen, M.J.; Hoy, R.R. An inexpensive sub-millisecond system for walking measurements of small animals based on optical computer mouse technology. J. Neurosci. Methods 2007, 161, 55–61. [Google Scholar] [CrossRef] [PubMed]
- Tresanchez, M.; Palleja, T.; Teixido, M.; Palacin, J. The optical mouse sensor as an incremental rotary encoder. Sens. Actuators A Phys. 2009, 155, 73–81. [Google Scholar] [CrossRef]
- Da Silva, M.M.; de Almeida Nozela, J.R.; Chaves, M.J.; Junior, R.A.B.; Rabal, H.J. Optical mouse acting as biospeckle sensor. Opt. Commun. 2011, 284, 1798–1802. [Google Scholar] [CrossRef]
- Nguyen, A.; Banic, A. 3DTouch: A wearable 3D input device with an optical sensor and a 9-DOF inertial measurement unit. arXiv, 2014; arXiv:1406.5581. [Google Scholar]
- Merriaux, P.; Dupuis, Y.; Boutteau, R.; Vasseur, P.; Savatier, X. A Study of Vicon System Positioning Performance. Sensors 2017, 17, 1591. [Google Scholar] [CrossRef] [PubMed]
- Minoni, U.; Signorini, A. Low-cost optical motion sensors: An experimental characterization. Sens. Actuators A Phys. 2006, 128, 402–408. [Google Scholar] [CrossRef]
- Kirtley, C.; Michael, W.; Jefferson, R.J. Influence of walking speed on gait parameters. J. Biomed. Eng. 1985, 7, 282–288. [Google Scholar] [CrossRef]
- Bejek, Z.; Paróczai, R.; Illyés, A.; Kiss, R.M. The influence of walking speed on gait parameters in healthy people and in patients with osteoarthritis. Knee Surg. Sports Traumatol. Arthrosc. 2006, 14, 612–622. [Google Scholar] [CrossRef] [PubMed]
- Noll, V.; Schumacher, C.; Beckerle, P.; Rinderknecht, S. Feasibility Study Using an Orthosis: An Approach to Measuring the Relative Movement between Residual Limb and Prosthetic Socket in Dynamic Gait Situations. In Proceedings of the ISPO World Congress 2017, Cape Town, South Africa, 8–11 May 2017. [Google Scholar]
- Bovi, G.; Rabuffetti, M.; Mazzoleni, P.; Ferrarin, M. A multiple-task gait analysis approach: Kinematic, kinetic and EMG reference data for healthy young and adult subjects. Gait Posture 2011, 33, 6–13. [Google Scholar] [CrossRef] [PubMed]
- Kwon, J.W.; Son, S.M.; Lee, N.K. Changes of kinematic parameters of lower extremities with gait speed: A 3D motion analysis study. J. Phys. Ther. Sci. 2015, 27, 477–479. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Factor/Parameter | Abbreviation | Two-Stage Factorial Settings | |
|---|---|---|---|
| − | + | ||
| Distance | l | 1 mm | 10 mm |
| Velocity | v | 1 mm/s | 100 mm/s |
| Direction | d | x | y |
| Sensor calibration velocity | 1 mm/s | 100 mm/s | |
| Sensor sensitivity | 200 cpi | 8200 cpi | |
| Measuring distance | z | 2.4 mm | |
| Cavity diameter (distal) | 21.5 mm | ||
| Cavity diameter (proximal) | 21.5 mm | ||
| Factor/Parameter | Abbreviation | Two-Stage Factorial Settings | |
|---|---|---|---|
| − | + | ||
| Distance | l | 1 mm | 10 mm |
| Velocity | v | 1 mm/s | 100 mm/s |
| Direction | d | x | y |
| Measuring distance | z | 2.18 mm | 2.62 mm |
| Cavity diameter (distal) | 4 mm | 21.5 mm | |
| Cavity diameter (proximal) | 4 mm | 21.5 mm | |
| Sensor calibration velocity | 1 mm/s | ||
| Sensor sensitivity | 8200 cpi | ||
| Data Set | Evaluation Points n | in mm | n Outside | Max() | |
|---|---|---|---|---|---|
| 1 | partic. 1/0.25 Hz | 58 | - | 5.73% | |
| 2 | /0.38 Hz | 51 | - | 6.47% | |
| 3 | partic. 2/0.25 Hz | 32 | - | 3.42% | |
| 4 | /0.38 Hz | 24 | - | 4.06% | |
| Gait Velocity | Movement in | ||||
|---|---|---|---|---|---|
| ap-Direction | pd-Direction | ||||
| partic. 1 | 0.6 m/s | 93 | (4.87 ± 0.40) mm | (1.62 ± 0.29) mm | 0.68 Hz |
| 1.0 m/s | 97 | (6.74 ± 0.19) mm | (2.28 ± 0.21) mm | 0.85 Hz | |
| 1.4 m/s | 104 | (7.70 ± 0.19) mm | (2.85 ± 0.27) mm | 0.96 Hz | |
| partic. 2 | 0.6 m/s | 97 | (0.75 ± 0.17) mm | (0.19 ± 0.08) mm | 0.69 Hz |
| 1.0 m/s | 111 | (1.17 ± 0.22) mm | (0.44 ± 0.14) mm | 0.86 Hz | |
| 1.4 m/s | 99 | (1.92 ± 0.26) mm | (1.22 ± 0.22) mm | 0.97 Hz | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Noll, V.; Rinderknecht, S.; Beckerle, P. Systematic Experimental Assessment of a 2D-Motion Sensor to Detect Relative Movement between Residual Limb and Prosthetic Socket. Sensors 2018, 18, 2170. https://doi.org/10.3390/s18072170
Noll V, Rinderknecht S, Beckerle P. Systematic Experimental Assessment of a 2D-Motion Sensor to Detect Relative Movement between Residual Limb and Prosthetic Socket. Sensors. 2018; 18(7):2170. https://doi.org/10.3390/s18072170
Chicago/Turabian StyleNoll, Veronika, Stephan Rinderknecht, and Philipp Beckerle. 2018. "Systematic Experimental Assessment of a 2D-Motion Sensor to Detect Relative Movement between Residual Limb and Prosthetic Socket" Sensors 18, no. 7: 2170. https://doi.org/10.3390/s18072170
APA StyleNoll, V., Rinderknecht, S., & Beckerle, P. (2018). Systematic Experimental Assessment of a 2D-Motion Sensor to Detect Relative Movement between Residual Limb and Prosthetic Socket. Sensors, 18(7), 2170. https://doi.org/10.3390/s18072170