Initial Alignment Algorithm Based on the DMCS Method in Single-Axis RSINS with Large Azimuth Misalignment Angles for Submarines


Abstract
1. Introduction
2. Basic Knowledge
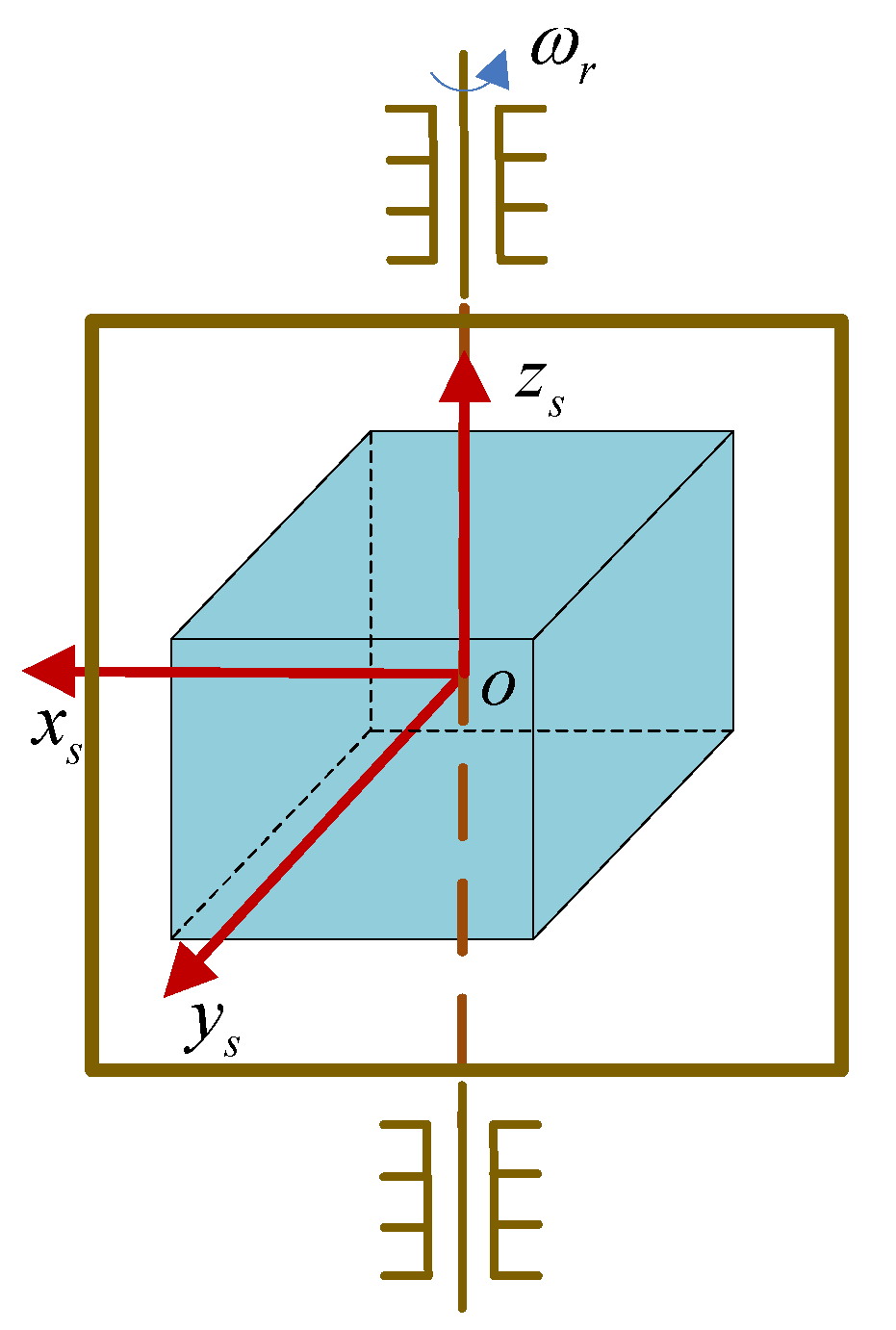
2.1. The Principle of Single-Axis RSINS
2.2. The Initial Alignment in Single-Axis RSINS
2.2.1. Coarse Alignment
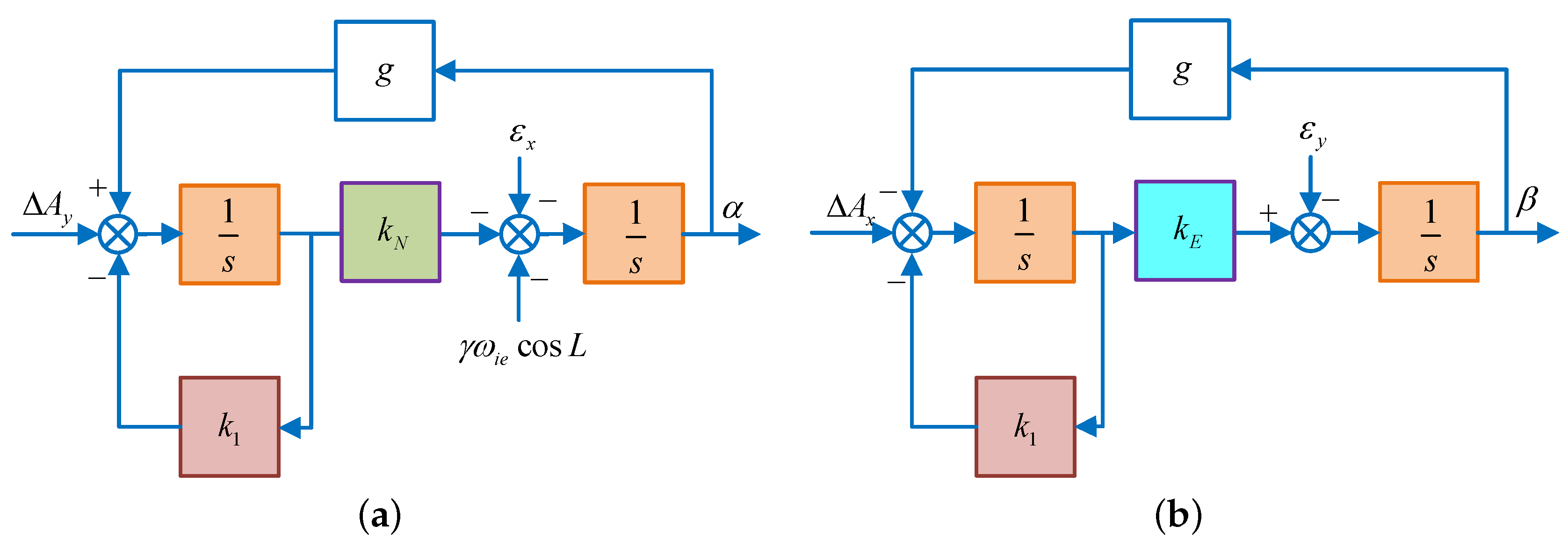
2.2.2. Fine Alignment
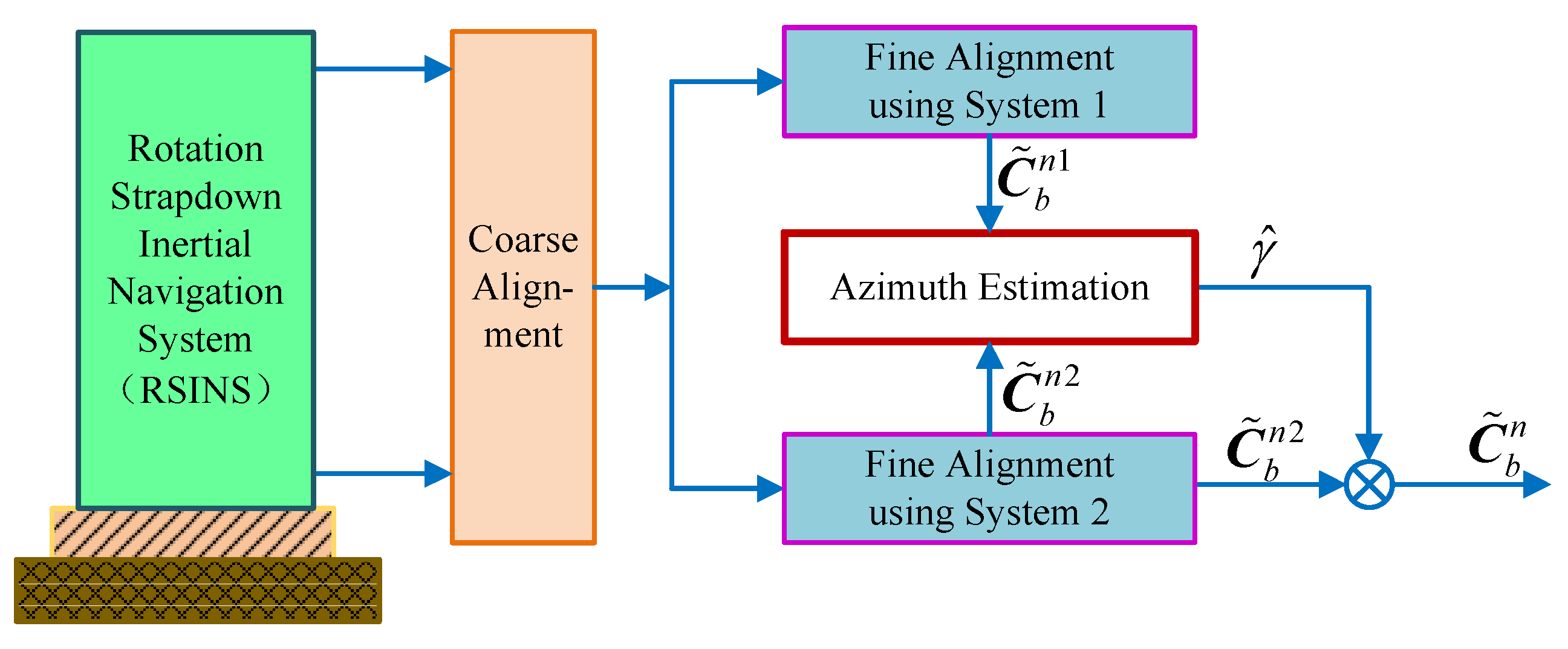
3. A Novel DMCS-Based Initial Alignment Algorithm with a Large Azimuth Misalignment Angle
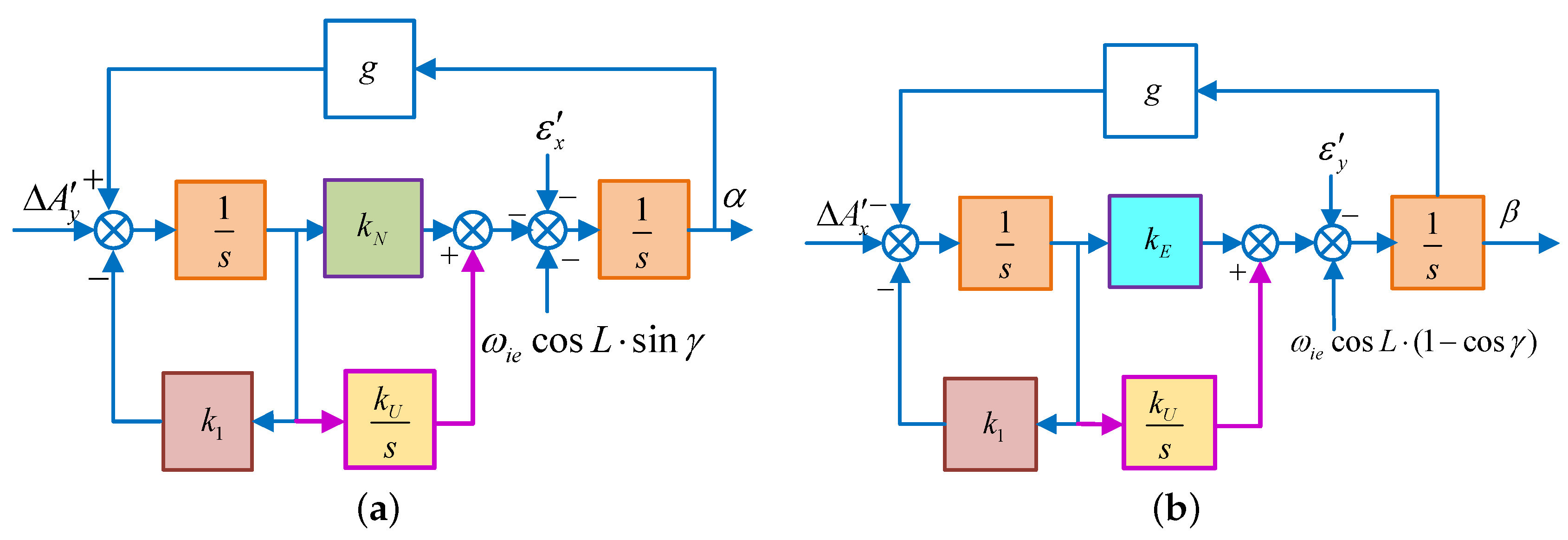
3.1. Initial Alignment Algorithm Based on the DMCS
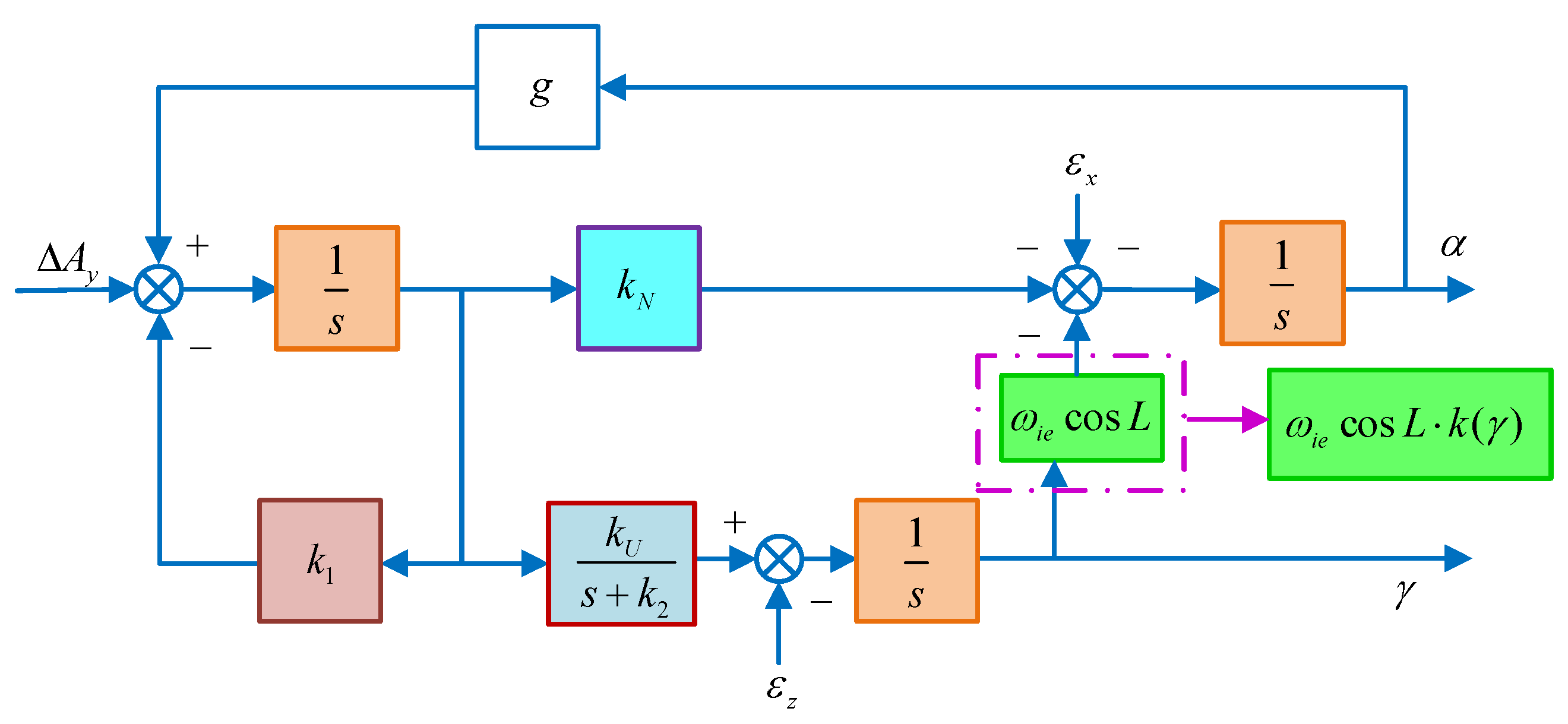
3.2. Improved DMCS-Based Alignment Algorithm with a Large Misalignment Angle
4. Simulation and Analysis
4.1. Simulation Condition and Settings
- Considering the b-frame coincides with the n-frame, the initial latitude and longitude are set as and , respectively;
- The accelerometers’ biases are set as ; the gyroscopes’ biases are set as ;
- The random noises of the accelerometer and the gyroscope are set as and , respectively;
- Scale factor errors of the accelerometer and the gyroscope are set as 10 ppm;
- The natural oscillation frequency is set to 0.02 Hz;
- The initial horizontal misalignment angles are set as , and the azimuth initial misalignment angles are set as and , respectively.
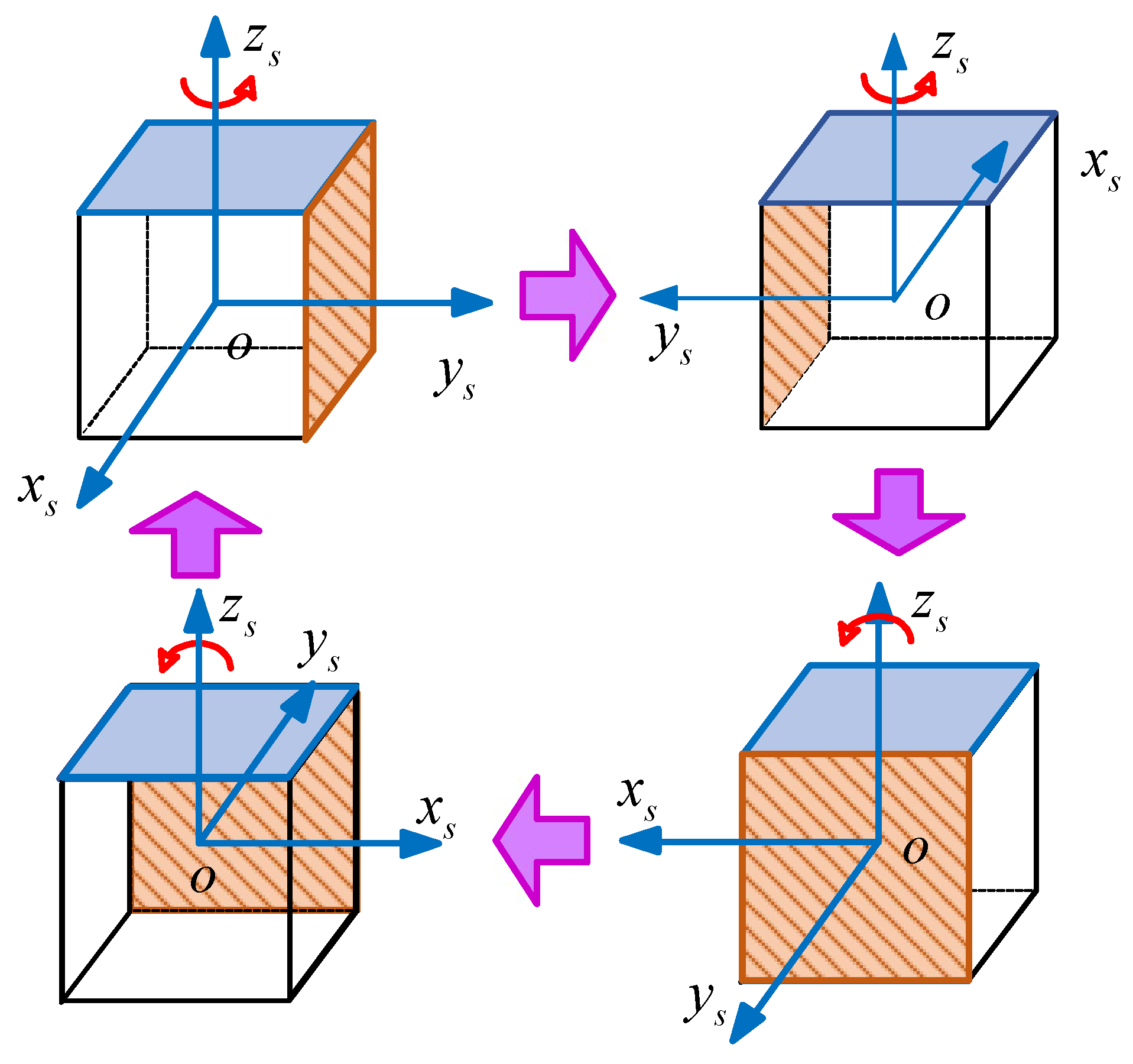
- The rotation scheme is shown as Figure 11, and the rotating rate is .
4.2. Simulation Results
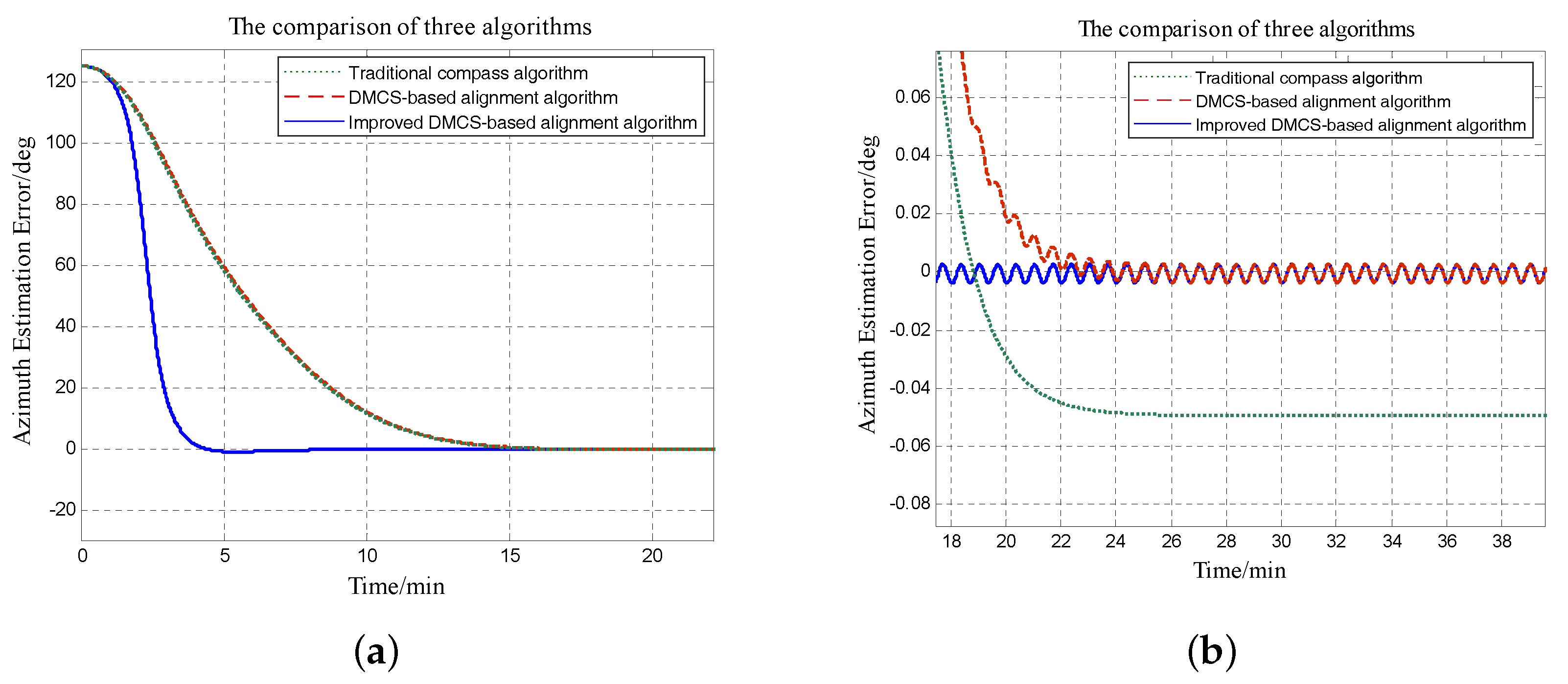
4.2.1. Initial Alignment Results
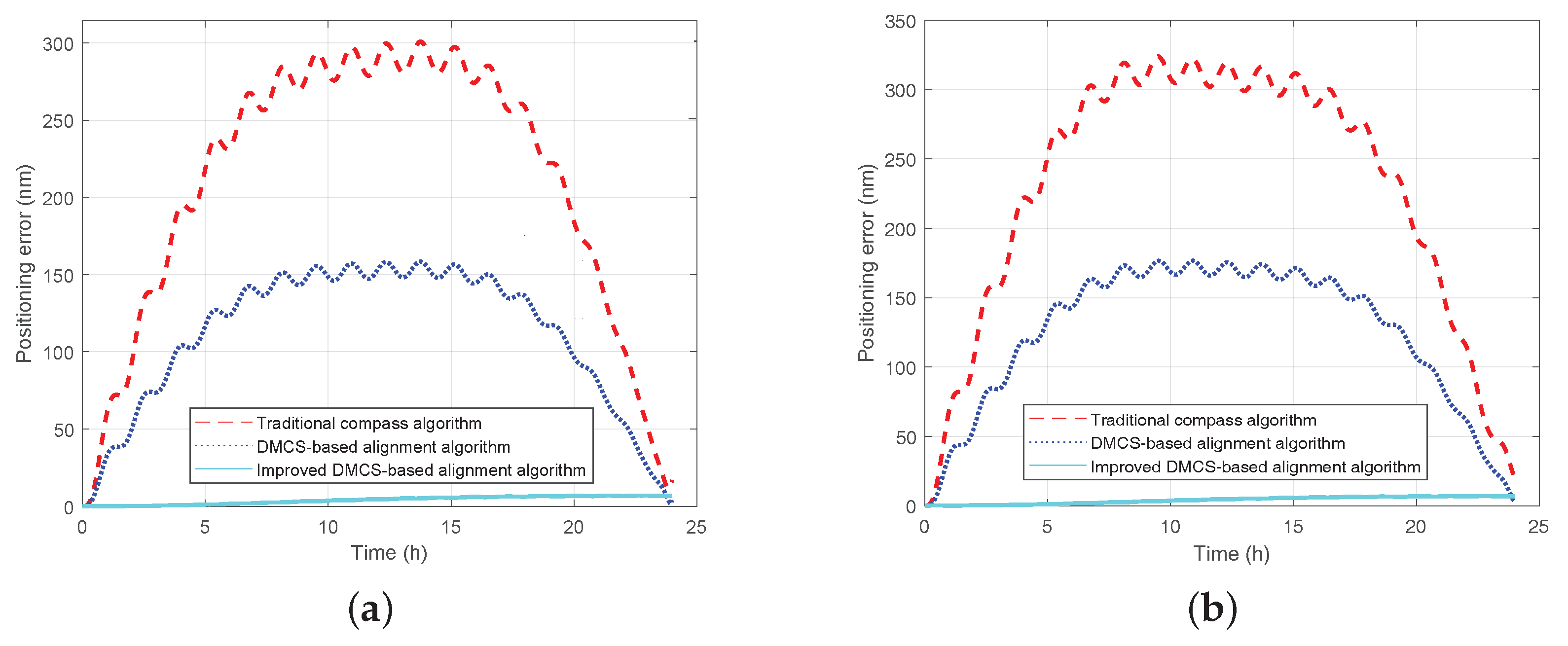
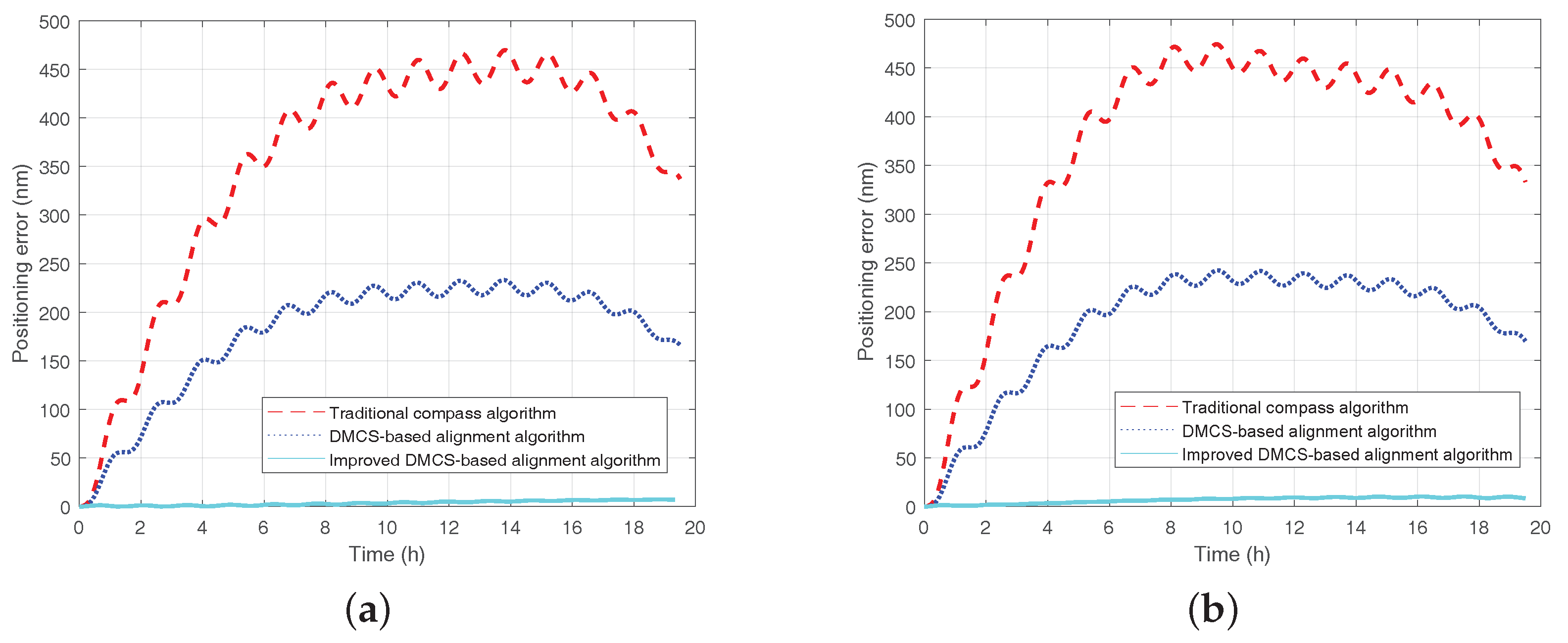
4.2.2. Pure Inertial Navigation Results
- (1)
- When the initial heading error is , the maximum positioning error can reach 300 nm when utilizing the traditional initial alignment algorithm under the static base; the maximum positioning error is about 160 nm when utilizing the initial alignment algorithm based on the DMCS method under the rotating base; the maximum positioning error is only 6 nm when utilizing the improved DMCS-based initial alignment algorithm under the rotating base.
- (2)
- When the initial heading error is , the maximum positioning error can reach 325 nm when utilizing the traditional initial alignment algorithm based on traditional compass method under the static base; the maximum positioning error is about 177 nm when utilizing the initial alignment algorithm based on the DMCS method under the rotating base; the maximum positioning error is about 7 nm when utilizing the improved DMCS-based initial alignment algorithm under the rotating base.
- (3)
- Comparing the red line and the blue line, we can know that the RMT could improve the performance of the inertial navigation system due to the inertial sensors’ mitigation.
- (4)
- Comparing the blue line and the light blue line, the results show that the initial alignment accuracy has a large effect on the performance of pure inertial navigation, and the improved DMCS-based alignment algorithm can achieve better navigation performance with little impact on the initial azimuth misalignment angle.
5. Real Test and Analysis
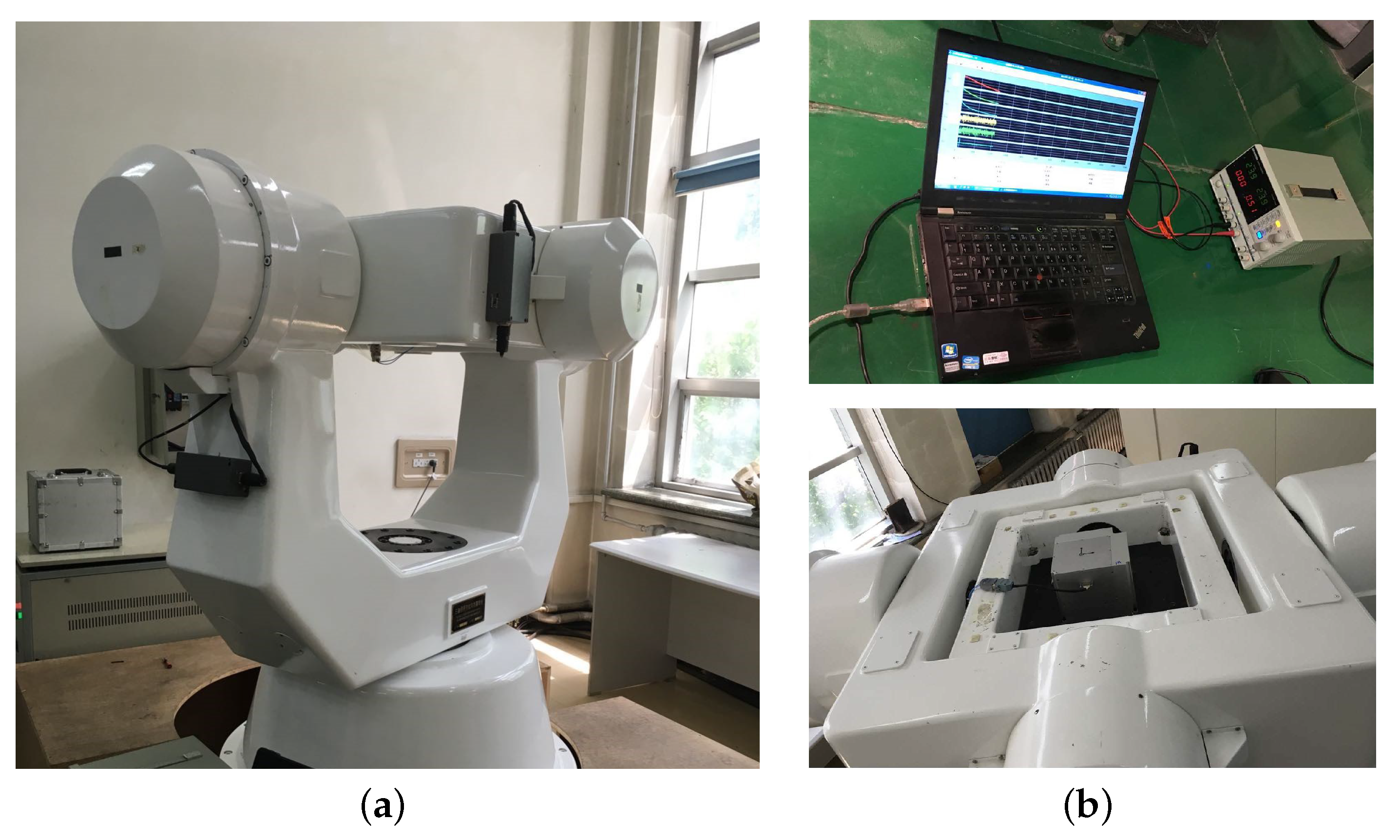
5.1. Test Environment Establishment
- Test 1:
- The turntable was kept horizontal and stable, and its initial heading was . The turntable was controlled to rotate clockwise along the outer-axis after two minutes. Then, the IMU worked under the patterns of single-axis rotation. The whole test lasted 20 h.
- Test 2:
- The turntable was kept horizontal and stable, and its initial heading was . The turntable was controlled to rotate anti-clockwise along the outer-axis after two minutes. Then, the IMU worked under the patterns of single-axis rotation. The whole test lasted 20 h.
- Test 3:
- The turntable was kept horizontal and stable, and its initial heading was . The turntable was controlled to rotate degrees clockwise along the outer-axis after two minutes. Then, the IMU kept stable. The whole test lasted 20 h.
- Test 4:
- The turntable was kept horizontal and stable, and its initial heading was . The turntable was controlled to rotate degrees anti-clockwise along the outer-axis after two minutes. Then, the IMU kept stable. The whole test lasted 20 h.
5.2. Results and Analysis
- The RMT could suppress the impact of the inertial sensors’ error on the inertial navigation system effectively to enhance the performance of the inertial navigation system;
- The performance of the initial alignment determines the accuracy of the inertial navigation system, and the initial alignment of high accuracy is the precondition and guarantee for high accuracy inertial navigation;
- The initial alignment algorithm based on DMCS method has better performance and a faster convergence rate compared with the initial alignment algorithm based on compass method; what is more, the improved DMCS-based initial alignment algorithm can obtain the best performance when the azimuth misalignment angle is large.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Jiang, Y.F.; Lin, Y.P. Error estimation of INS ground alignment through observability analysis. Aerosp. Electr. Syst. IEEE Trans. 1992, 28, 92–97. [Google Scholar] [CrossRef]
- Liu, F.; Wang, W.; Li, K.; Wang, L. Alignment Method for FOG Single-Axis Rotation-Modulation SINS. Appl. Mech. Mater. 2012, 229–231, 1127–1131. [Google Scholar] [CrossRef]
- Yi, J.; Zhang, L.; Shu, R.; Wang, J. Initial Alignment for SINS Based on Low-Cost IMU. J. Comput. 2011, 6, 1080–1085. [Google Scholar] [CrossRef]
- Sun, Q.; Zhang, Y.; Wang, J.; Gao, W. An improved FAST feature extraction based on RANSAC method of vision/SINS integrated navigation system in GNSS-denied environments. Adv. Space Res. 2017, 60, 2660–2671. [Google Scholar] [CrossRef]
- Sun, Q.; Tian, Y.; Diao, M. Cooperative Localization Algorithmm based on Hybrid Topology Architecture for Multiple Mobile Robot System. IEEE Internet Things J. 2018, 1. [Google Scholar] [CrossRef]
- Ishibashi, S.; Tsukioka, S.; Yoshida, H.; Hyakudome, T.; Sawa, T.; Tahara, J.; Aoki, T.; Ishikawa, A. Accuracy Improvement of an Inertial Navigation System Brought about by the Rotational Motion. Oceans 2007, 1–5. [Google Scholar] [CrossRef]
- Tucker, T.; Levinson, E. The AN/WSN-7B Marine Gyrocompass/Navigator. In Proceedings of the National Technical Meeting of the Institute of Navigation, Anaheim, CA, USA, 26–28 January 2000; pp. 348–357. [Google Scholar]
- Lahham, J.I.; Brazell, J.R. Acoustic noise reduction in the MK 49 ship’s inertial navigation system (SINS). In Proceedings of the IEEE PLANS 92 Position Location and Navigation Symposium Record, Monterey, CA, USA, 23–27 March 1992; pp. 32–39. [Google Scholar]
- Levinson, E.; Ter Horst, J.; Willcocks, M. The next generation marine inertial navigator is here now. In Proceedings of the 1994 IEEE Position, Location and Navigation Symposium, Las Vegas, NV, USA, 11–15 April 1994; pp. 121–127. [Google Scholar]
- Mao, Y.L.; Chen, J.B.; Song, C.L.; Yin, J.Y. Single-Axis Rotation Modulation of SINS. Appl. Mech. Mater. 2013, 313–314, 643–646. [Google Scholar] [CrossRef]
- Gao, W.; Che, Y.; Yu, F.; Yueyang, B.; Jia, H. A Comprehensive Calibration Algorithmm based on Inertial Frame for Single-Axis Rotation SINS. Adv. Inf. Sci. Serv. Sci. 2013, 5, 308–317. [Google Scholar]
- Titterton, D.H.; Weston, J.L. Strapdown Inertial Navigation Technology; Institution of Electrical Engineers: London, UK, 2004; pp. 33–34. [Google Scholar]
- El-Sheimy, N.; Nassar, S.; Noureldin, A. Wavelet de-noising for IMU alignment. IEEE Aerosp. Electr. Syst. Mag. 2004, 19, 32–39. [Google Scholar] [CrossRef]
- Wu, M.; Wu, Y.; Hu, X.; Hu, D. Optimization-based alignment for inertial navigation systems: Theory and algorithm. Aerosp. Sci. Technol. 2011, 15, 1–17. [Google Scholar] [CrossRef]
- Wang, Y.G.; Yang, J.S. Self-Alignment Algorithmm for Strapdown Inertial Navigation System under Strong Flurry Interference. Appl. Mech. Mater. 2013, 347–350, 3667–3671. [Google Scholar] [CrossRef]
- Sun, G.; Xu, S.; Li, Z. Finite-Time Fuzzy Sampled-Data Control for Nonlinear Flexible Spacecraft With Stochastic Actuator Failures. IEEE Trans. Ind. Electr. 2017, 64, 3851–3861. [Google Scholar] [CrossRef]
- Jiang, Y.F. Error analysis of analytic coarse alignment methods. IEEE Trans. Aerosp. Electr. Syst. 2002, 34, 334–337. [Google Scholar] [CrossRef]
- Sun, G.; Ma, Z. Practical Tracking Control of Linear Motor with Adaptive Fractional Order Terminal Sliding Mode Control. IEEE/ASME Trans. Mechatron. 2017, 22, 2643–2653. [Google Scholar] [CrossRef]
- Schimelevich, L.; Naor, R. New approach to coarse alignment. In Proceedings of the Position, Location and Navigation Symposium, Atlanta, GA, USA, 22–25 April 1996; pp. 324–327. [Google Scholar]
- Gu, D.; El-Sheimy, N.; Hassan, T.; Syed, Z. Coarse alignment for marine SINS using gravity in the inertial frame as a reference. In Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; pp. 961–965. [Google Scholar]
- Silson, P.M.G. Coarse Alignment of a Ship’s Strapdown Inertial Attitude Reference System Using Velocity Loci. IEEE Trans. Instrum. Meas. 2011, 60, 1930–1941. [Google Scholar] [CrossRef]
- Zhang, Z.W.; Sun, H.D. Initial Alignment Algorithmm Study Based on Rotating Modulation and Kalman Filtering. Appl. Mech. Mater. 2014, 513-517, 585–588. [Google Scholar] [CrossRef]
- An, S.Q.; Zhang, J.K. The Study of Kalman Filtering Algorithmm in the Initial Alignment of Strapdown Inertial Navigation System. Appl. Mech. Mater. 2015, 740, 596. [Google Scholar] [CrossRef]
- Li, A.; Qin, F.J.; Xu, J.N. Gyroscope free strapdown inertial navigation system using rotation modulation. In Proceedings of the Second International Conference on Intelligent Computation Technology and Automation, Changsha, China, 10–11 October 2009; pp. 611–614. [Google Scholar]
- Gosiewski, Z.; Ortyl, A. Strapdown inertial navigation system. II: Error models. J. Theor. Appl. Mech. 1998, 36, 937–962. [Google Scholar]
- Sun, Q.; Diao, M.; Zhang, Y.; Li, Y. Cooperative Localization Algorithmm for Multiple Mobile Robot System in Indoor Environment Based on Variance Component Estimation. Symmetry 2017, 9, 94. [Google Scholar] [CrossRef]
- Yu, F.; Sun, Q. Angular Rate Optimal Design for the Rotary Strapdown Inertial Navigation System. Sensors 2014, 14, 7156–7180. [Google Scholar] [CrossRef] [PubMed]
- Sun, Q.; Diao, M.; Li, Y.; Zhang, Y. An improved binocular visual odometry algorithm based on the random sample consensus in visual navigation systems. Ind. Robot 2017, 44, 542–551. [Google Scholar] [CrossRef]
- Yuan, B.; Liao, D.; Han, S. Error compensation of an optical gyro INS by multi-axis rotation. Meas. Sci. Technol. 2012, 23, 91–95. [Google Scholar] [CrossRef]
- Ren, L.; Du, J.B.; Han, L.J. Investigation on azimuth effect of FOG INS multi-position alignment in magnetic field. In Proceedings of the 2014 DGON Inertial Sensors and Systems (ISS) Symposium, Karlsruhe, Germany, 16–17 September 2014; pp. 1–10. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Indexes | |
|---|---|---|
| Gyroscope | Bias Instability | |
| Bias Repeatability | ||
| Random Walk Coefficient | ||
| Nonlinearity of Scale Factor | 20 ppm | |
| Dynamic Range | ||
| Accelerometer | Bias Instability | |
| Random Noise | ||
| Nonlinearity of Scale Factor | 10 ppm | |
| Dynamic Range |
| Pitch () | Roll () | Yaw () | ||
|---|---|---|---|---|
| Test 3 | Traditional compass algorithm | 0.072 | 0.092 | 176.785 |
| Test 1 | DMCS-based alignment algorithm | 0.018 | 0.027 | 173.335 |
| Improved DMCS-based alignment algorithm | 0.005 | 0.014 | 169.713 | |
| Test 4 | Traditional compass algorithm | −0.084 | 0.098 | 226.515 |
| Test 2 | DMCS-based alignment algorithm | −0.039 | 0.032 | 230.675 |
| Improved DMCS-based alignment algorithm | 0.006 | 0.014 | 234.716 |
| Pitch () | Roll () | Yaw () | ||
|---|---|---|---|---|
| Test 3 | Traditional compass algorithm | 0.020 | 0.034 | 170.575 |
| Test 1 | DMCS-based alignment algorithm | 0.008 | 0.015 | 170.155 |
| Improved DMCS-based alignment algorithm | 0.004 | 0.011 | 169.672 | |
| Test 4 | Traditional compass algorithm | −0.029 | 0.040 | 233.675 |
| Test 2 | DMCS-based alignment algorithm | −0.015 | 0.022 | 234.025 |
| Improved DMCS-based alignment algorithm | 0.004 | 0.012 | 234.674 |
| Positioning Error (nm) | |||
|---|---|---|---|
| 15 min | Test 3 | Traditional compass algorithm | 469.69 |
| Test 1 | DMCS-based alignment algorithm | 233.13 | |
| Improved DMCS-based alignment algorithm | 7.4 | ||
| Test 4 | Traditional compass algorithm | 469.69 | |
| Test 2 | DMCS-based alignment algorithm | 233.13 | |
| Improved DMCS-based alignment algorithm | 7.4 | ||
| 25 min | Test 3 | Traditional compass algorithm | 55.17 |
| Test 1 | DMCS-based alignment algorithm | 28.05 | |
| Improved DMCS-based alignment algorithm | 7.05 | ||
| Test 4 | Traditional compass algorithm | 65.52 | |
| Test 2 | DMCS-based alignment algorithm | 43.04 | |
| Improved DMCS-based alignment algorithm | 9.03 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, X.-W.; Sun, Q. Initial Alignment Algorithm Based on the DMCS Method in Single-Axis RSINS with Large Azimuth Misalignment Angles for Submarines. Sensors 2018, 18, 2123. https://doi.org/10.3390/s18072123
Xia X-W, Sun Q. Initial Alignment Algorithm Based on the DMCS Method in Single-Axis RSINS with Large Azimuth Misalignment Angles for Submarines. Sensors. 2018; 18(7):2123. https://doi.org/10.3390/s18072123
Chicago/Turabian StyleXia, Xiu-Wei, and Qian Sun. 2018. "Initial Alignment Algorithm Based on the DMCS Method in Single-Axis RSINS with Large Azimuth Misalignment Angles for Submarines" Sensors 18, no. 7: 2123. https://doi.org/10.3390/s18072123
APA StyleXia, X.-W., & Sun, Q. (2018). Initial Alignment Algorithm Based on the DMCS Method in Single-Axis RSINS with Large Azimuth Misalignment Angles for Submarines. Sensors, 18(7), 2123. https://doi.org/10.3390/s18072123