The induction signal expression of the five-spherical-electrode detection array and the principle of “constraint scanning positioning method” are mainly analyzed in this section.
2.1. Electrostatic Field Sensing Principle
As a charged body, with the hand being the tip, it can produce a disturbance on the electric field of surrounding space by using hand motion. Based on the theories of electrodynamics, as the hand movement changes the electric fields in space, the induced charge on the surface of the conductor redistributes, leading to the generation of induced current on the conductor.
In this study, the induction signals of spherical electrodes were quantitatively analyzed.
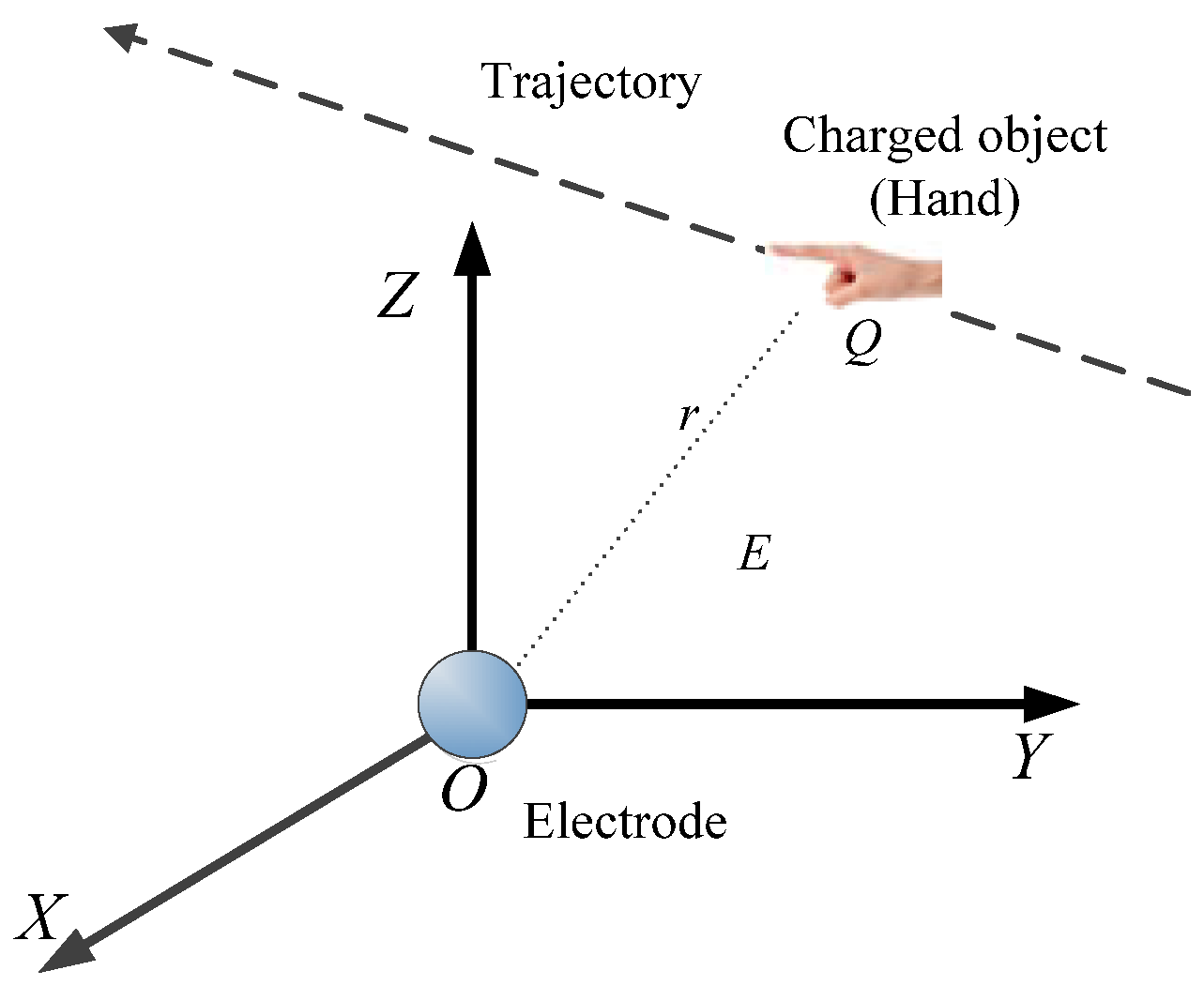
Figure 1 shows the positional relationship between the spherical electrode and the hand target
T. The spherical electrode is at the origin of the coordinate, the hand charge quantity is
Q, the hand moves along a certain trajectory, and the center of the hand has a distance
r from the center of the spherical electrode.
According to the previous research results, when the human hand moves, the induced current signal of the spherical electrode can be expressed as [
7]:
Q0 is the target (hand) charge quantity. R0 is the spherical electrode radius. r is the distance from the hand to the spherical electrode.
The real-time position of the 3D space of the hand movement was detected with a five-spherical- electrode sensing array, and a Cartesian coordinate system model of the detection array was established, as shown in
Figure 2.
Coordinates of the charged target T are (x, y, z), with a charge quantity of Q0. Electrodes S1, S2, S3, and S4 are located at the four vertices of the square centered on the origin O and with 2l being the side length on the XOY plane. The coordinates of the four vertices are S1 (−l, −l, 0), S2 (l, −l, 0), S3 (l, l, 0), and S4 (−l, l, 0). The electrode S5 was set on the z-axis with the coordinates (0, 0, −h).
Let
S be the effective sensing area of the spherical electrode and
R0 the spherical electrode radius. According to the Gaussian theorem, the induced charge of the electrode
i,
i = (1, 2, 3, 4, 5) under the electric field of the charge source T is:
Equation (2) is the induced current output of each element of the five-spherical-electrode detection array.
2.2. Hand Position Solving Algorithm Based on Human Body Electrostatic Forces
By integrating the induced current of each element of the five-spherical-electrode detection array, the induced charge quantity of all electrodes can be obtained. Calculate the induced charge ratio ,, of electrodes 1 to 5. The charge of the charge source is eliminated to obtain an equation containing only the position parameters. The geometric constraint is applied to constrain the charge source position to a circle. Finally, scan the position of the charge source on the circle, and determine the 3D coordinates of the charge source by using the charge quantity of electrode 5 on the z-axis, which is called the constraint scanning positioning method.
Step 1 Current integration to obtain the charge quantity
Integrating the detection from Equation (2),
Q1–
Q5 can be obtained:
Step 2: Ratio elimination
Calculate the ratio of the induced charge quantity of each electrode to eliminate the charge quantity of the charge source, and we can obtain:
Step 3: Spherical constraint
Calculate the square root of
in Equation (4) to obtain:
where
r1 is the distance between the charge source
T and electrode
S1, and
r2 is the distance between charge source
T and
S2. According to the sphere definition, “the trajectory of all the points with constant ratio of distances to two fixed points” [
20], all the points satisfying Equation (5) can form a sphere, so the charge source
T can be constrained on this sphere. The center and radius of the sphere are calculated below.
To more easily determine the spherical center and radius, coordinate system transformation is implemented first, as shown in
Figure 3. Point
T and the electrodes
S1 and
S2 are transformed from the 3D coordinate system to the plane coordinate system composed of
T,
S1, and
S2. Since the
S1 and
S2 points are on the YOZ plane, the coordinate transformation does not change the distance between two points.
Suppose point
T to be (
x’,
y’),
S1 (
−l,
0),
S2 (
l,
0) in the plane coordinate system
X’O’Y’. If
k1 = 1, point
T is on the bisector plane of line
S1 S2. If
k1 1, then the square of the distance ratio from point
T to
S1,
S2 can be written as:
Substituting Equation (6) into the equation of a circle:
That is, on the plane X’O’Y’, point T is on the circle with center A’(−), and radius . The center of circle A’ is collinear with S1, S2.
When transforming to the XYZ coordinate system, because the center position and the radius do not change when the coordinate transformation is performed and the center of circle A’ is collinear with S1, S2, the center of circle is in the XOY plane in XYZ coordinate system. Therefore, in XYZ coordinate system, the distance between points T and A (−) is . All points T on the sphere with A as the center and as the radius satisfy Equation (5).
Similarly, in the plane TS2S3, the distance between point T and point B(−) is . When transforming to XYZ space, the distance between point T and B (l, −) is . Then point T can be constrained to the sphere with B as the center and as the radius.
In the plane TS3S4, the distance between T and C’(−) is . When transforming to XYZ space, the distance between point T and C () is . Then point T can be constrained to the sphere with C as the center and as the radius.
Step 4: Circular constraint
Since S1, S2, S3, and S4 are coplanar, it is easy to prove that A (), B(−), and C () are collinear. So, the three spherical surfaces with A, B, and C as centers obtained in the spherical constraint step will intersect on a circle, so one of the spheres is redundant. Taking the two spherical surfaces with A and B as centers as an example, implement the circular constraint.
As shown in
Figure 4, through the above-mentioned two points,
A and
B, point
T can be constrained to two spherical surfaces that intersect to a circle, meaning point
T is further constrained to a circle with radius of
r0 and center
W. Since the center
W is on the line AB, the center
W is on the
XOY plane, and the coordinates of
W are (x
0, y
0, 0). The specific values of x
0, y
0 and r
0 can be obtained from the coordinates of points
A and
B,
r1 and
r2, through the geometric relations.
From a mathematical point of view, the two spherical surfaces with A and B as centers can constrain the charge sources to a circle, but during the actual use of the system, due to systematic error, the positions of A and B may have some deviations. To improve the accuracy of the circular constraint, it can be further improved by straight line fitting of A, B, and C.
Through
A,
B,
C straight line fitting:
According to the positions of A, B, C and r1, r2, r3, we can determine that point T is located on the circle with r0 as the radius and center W (x0, y0, 0). The line in Equation (8) is vertical to the plane where the circle is located and through the center W of the circle.
Step 5: Angle Scanning
Represent the charge source T with the polar coordinates on the circle determined in Step 4. Set the angle between the TW connection line and plane XOY as , with a scan value of , so that when point T moves along the circle, the position of point T can be obtained with Equation (4).
As shown in
Figure 5, set 0 < θ < π, as the hand is always in the
z-axis positive direction side in human–computer interactions. The projection of TW on the plane
XOY is a straight line y = a
1x + b
1, a
1 =
, where
a is the slope of the straight line in Equation (8). Then the coordinates of point
T are converted to polar coordinates:
Scan
θ in the range of (0,
) according to a step size, so that:
where
and
are the positions of electrodes 1 and 5, respectively, and
is (
−l,
−l,
0) and
is (
0,
0,
h) in the system. At this time,
in Equation (9) is the actual coordinates of the hand.
The real-time position of the hand can be obtained by calculating the spatial coordinates of the charge source with a small amount of computation and high accuracy.
The calculated position of the hand is affected by the noise of the system, which will cause some errors. Since the hand motion is a continuous trajectory, the Kalman filtering method can be used to reduce the hand position resolution error and improve the system accuracy. When the system sampling rate is 1k, the calculated distance between the adjacent hand positions is on the millimeter scale, and the distance is very close. This can be approximated as a rectilinear motion between the adjacent hand positions, so we use a rectilinear motion model and select velocity covariance and acceleration covariance to do the Kalman filtering.
2.3. Design and Experiment of Non-Contact Interactive System Based on Human Body Electrostatic Forces
Using the electrostatic array layout and signal processing, the human–computer interactive system based on the electrostatics of the human body can obtain human hand movement parameter information, such as angle, direction, speed, or real-time 3D positions, obtain the hand movement trajectory, judge the operation intentions of operators, control and operate the software running on the computer, and complete the human-machine interactive function.
Figure 6 shows the application schematic diagram of our human-machine interactive system based on the electrostatics of the human body. With the display devices (display screen and projector) and computer, the system can allow operators to perform the gesture human–computer interactive operations with various 3D software, such as virtual assembly, virtual experiment, and 3D modeling software, under a variety of lighting and complex backgrounds without wearing any sensing equipment.
We designed a top-level human–computer interaction system based on the electrostatics of the human body, built the hierarchical architecture, and divided the entire human–computer interaction system into physical, information, and application layers. The physical layer is the physical basis of the whole system, including the sensing circuits and signal processing circuit hardware. The information layer processes the signals from the physical layer, and mainly performs model and algorithm research, including solving for the position information of the charge sources according to the source azimuth solving model of electric fields. The information layer also performs mode recognition and matching calculations for gesture information patterns, and finally outputs the standard human hand movement identification information. The application layer mainly completes research to output data from the information layer, constructs the human-machine interactive mode through the definition of human gestures, and designs the human-machine interactive interface to complete the HCI function based on electrostatic detection. The overall scheme is shown in
Figure 7.
We built a real-time position measurement system for non-contact HCI based on the electrostatic signals, as shown in
Figure 8a. The system mainly consists of five-spherical-electrode, electrostatic sensing circuits, and data acquisition processing units. The five-spherical-electrode are arranged in the positions shown in
Figure 8a, and the vertical plane is defined as the
XOY plane. The four spherical electrodes are S
1–S
5, arranged at the four corners of the square with a side length of 0.3 m on the
XOY plane. The square center is the origin of the coordinates, and the fifth spherical electrode is S
5. As the center electrode, S
5 is arranged on the
z-axis 0.2 m away from the
XOY platform. We used a round planar electrode instead of a spherical electrode to make the same experimental device. As shown in
Figure 8b, this device has the same performance parameters as a spherical electrode device and has a more compact structure. In actual use, the electrodes can be made of transparent conductive materials such as Indium Tin Oxide (ITO) and integrated with the display screen to accommodate more application scenarios.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















