A Novel Strategy of Ambiguity Correction for the Improved Faraday Rotation Estimator in Linearly Full-Polarimetric SAR Data

Abstract
:1. Introduction
2. Faraday Rotation Analysis
2.1. Faraday Rotation
2.2. Faraday Rotation Estimators
2.3. An Improved Estimator
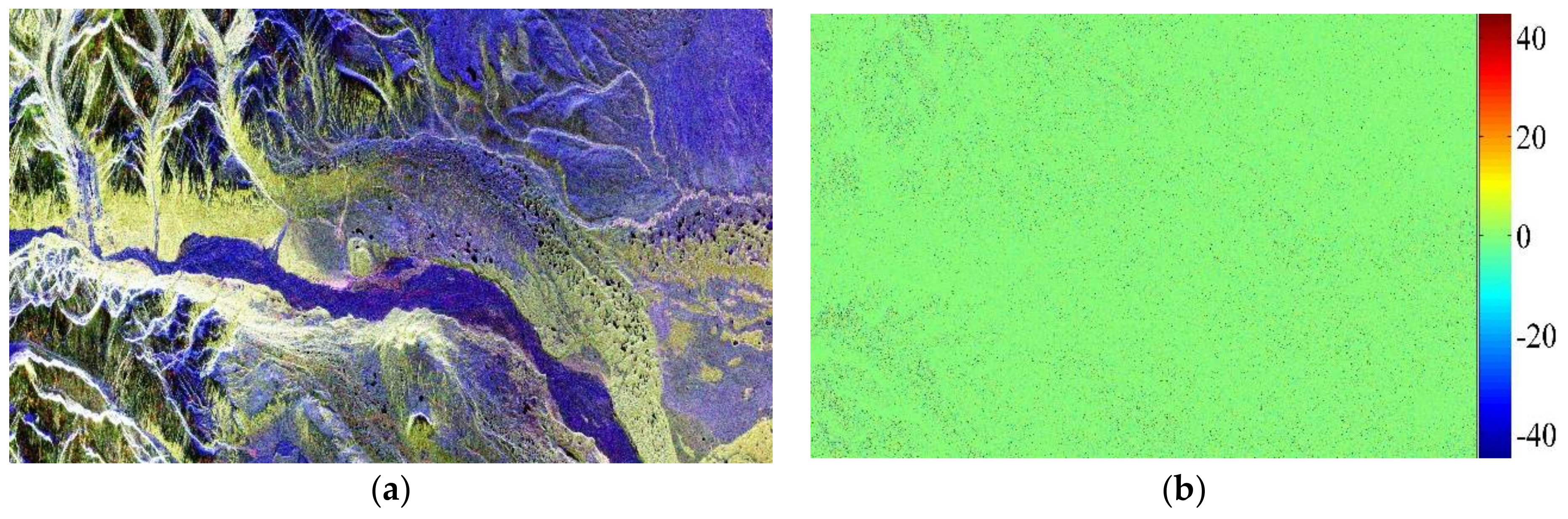
2.4. FR Estimation Based on Real Data
3. Performance Analysis
3.1. Experimental Parameters
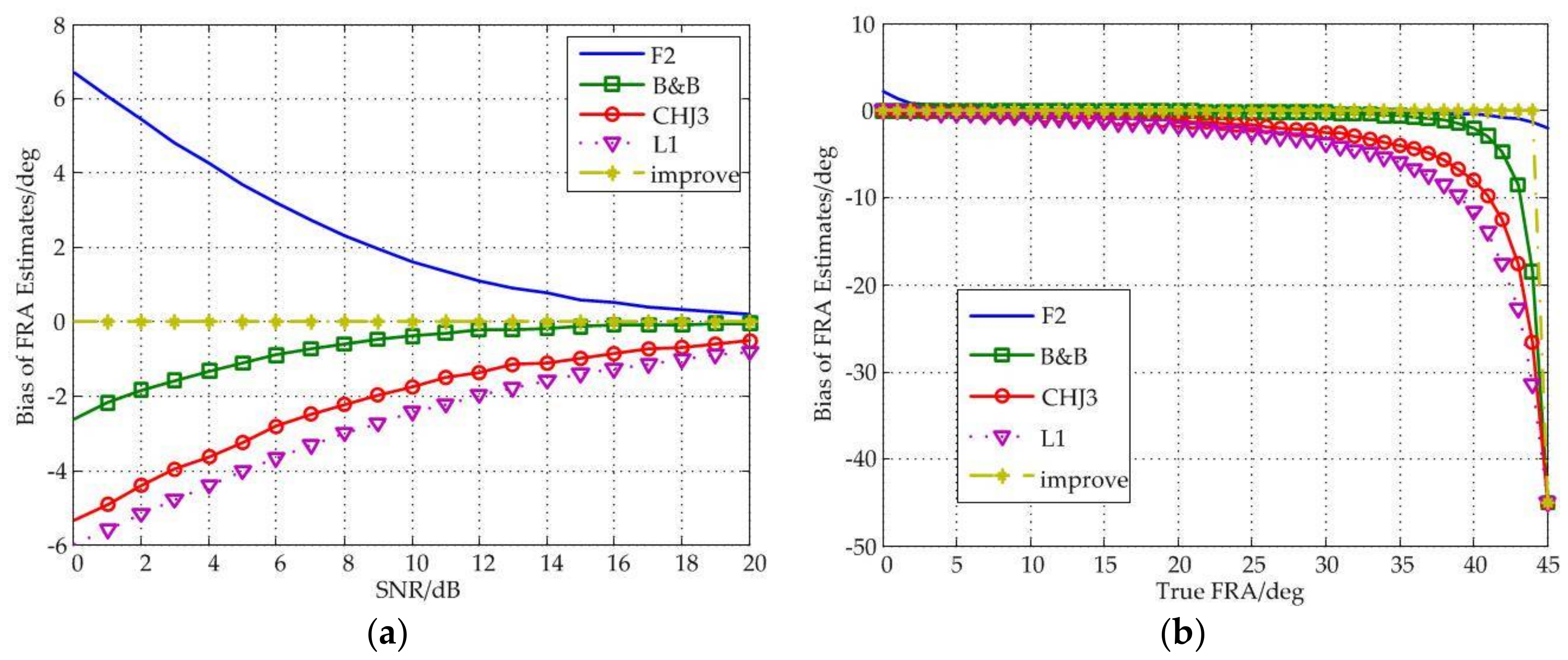
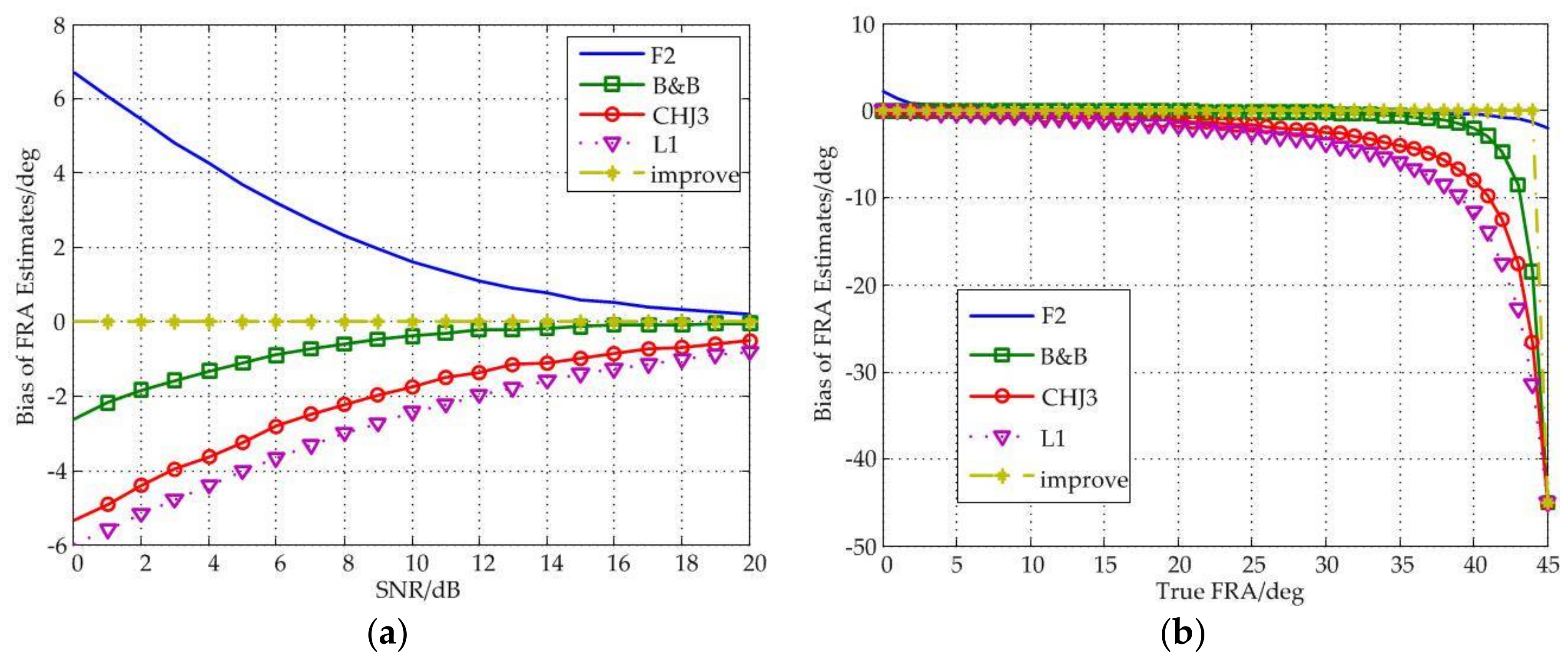
3.2. Effects of System Noise
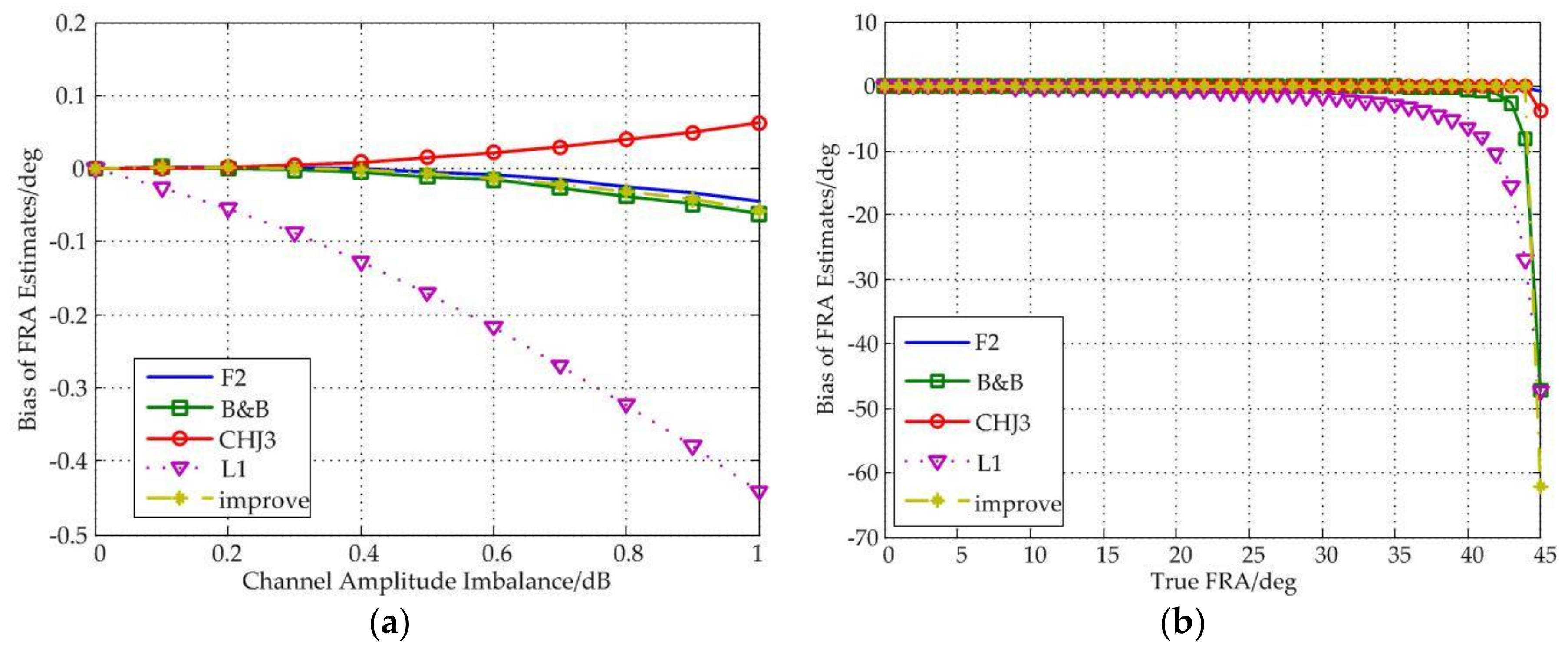
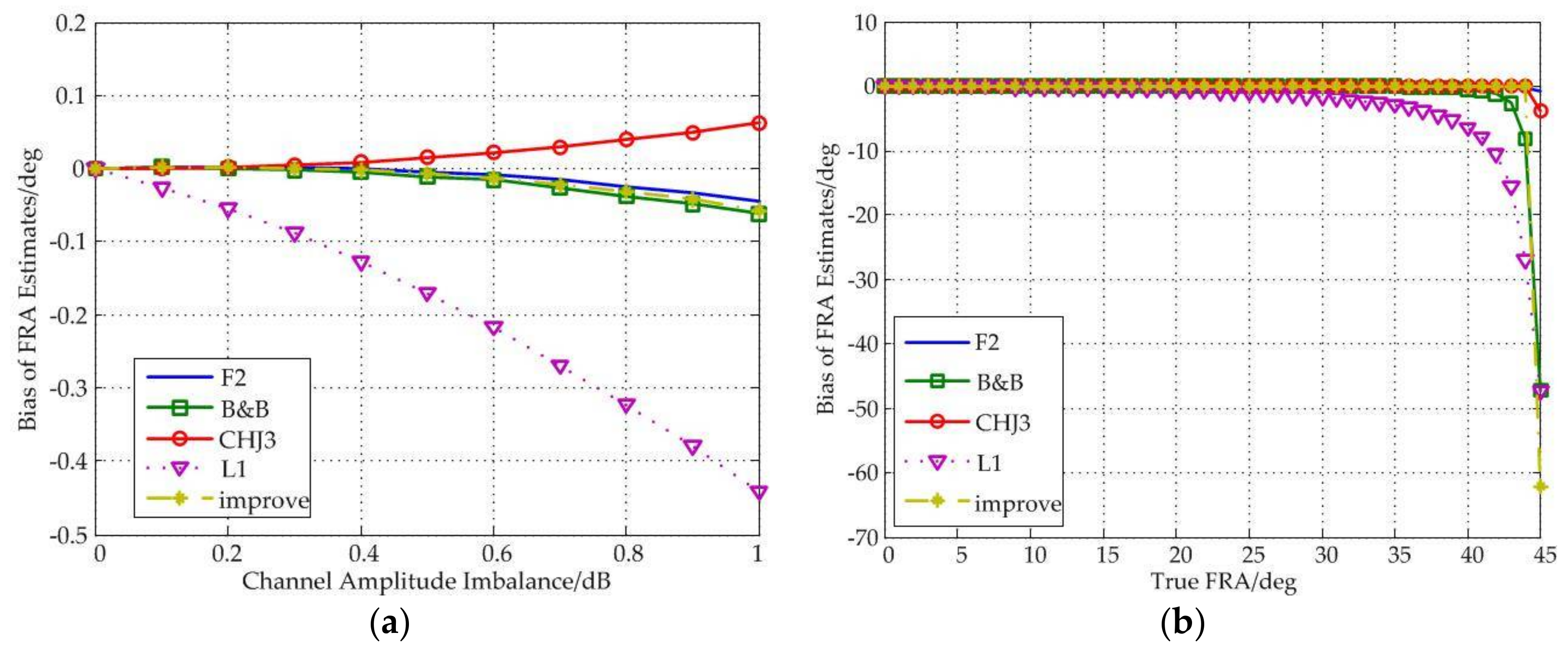
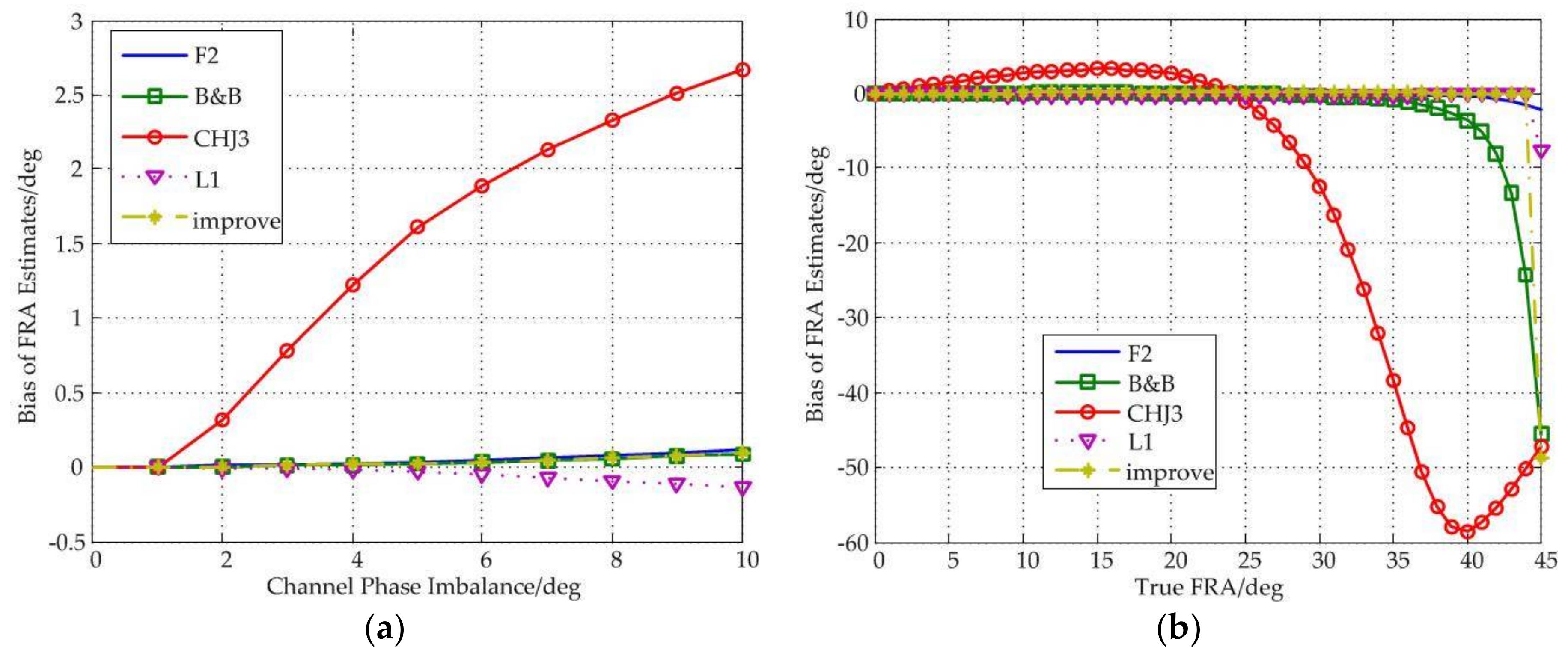
3.3. Effects of Channel Imbalance
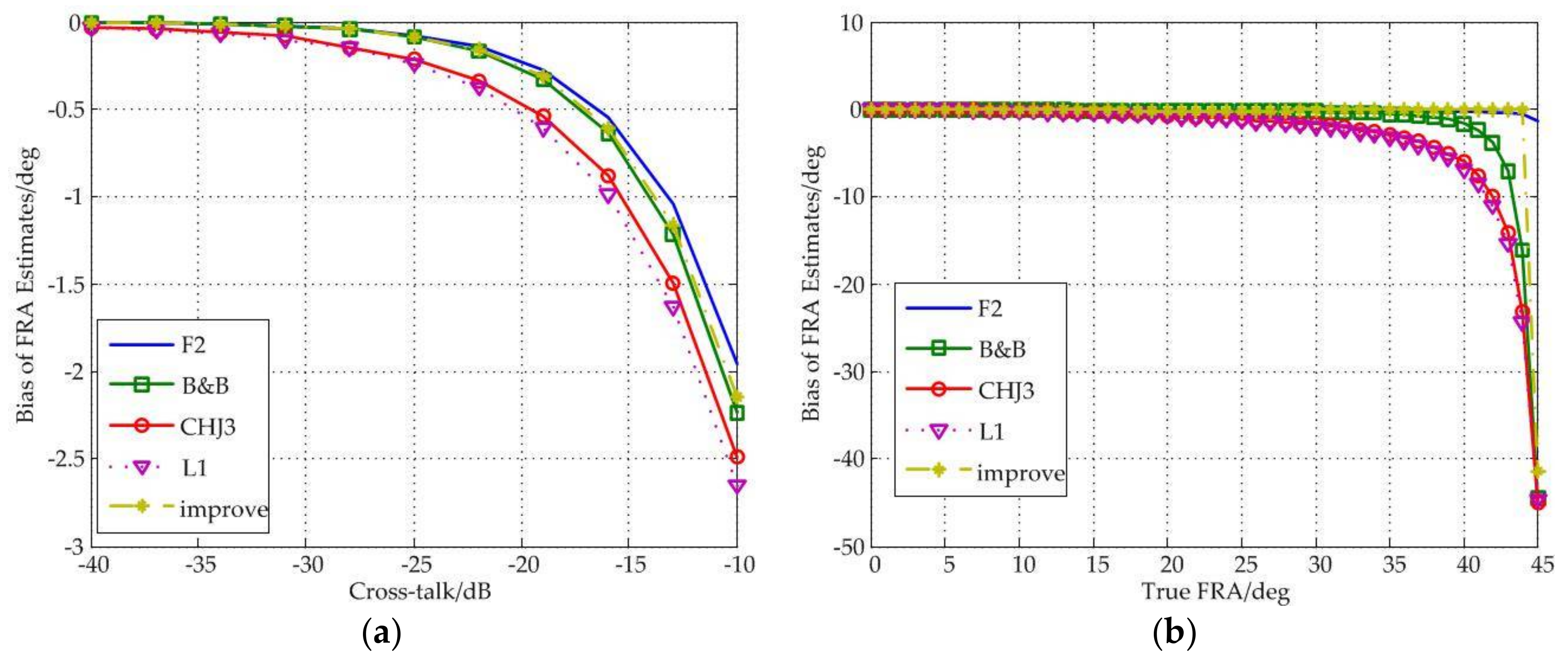
3.4. Effects of Cross-Talk
4. FRA Ambiguity
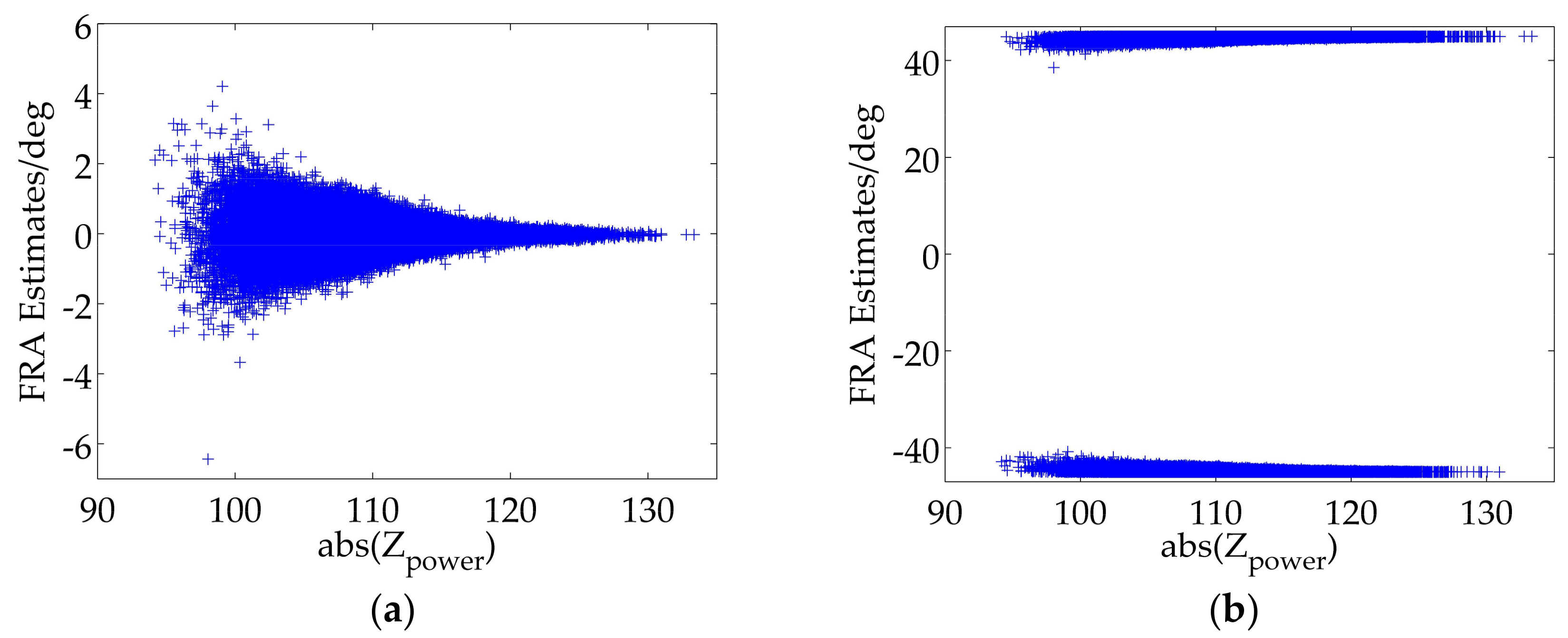
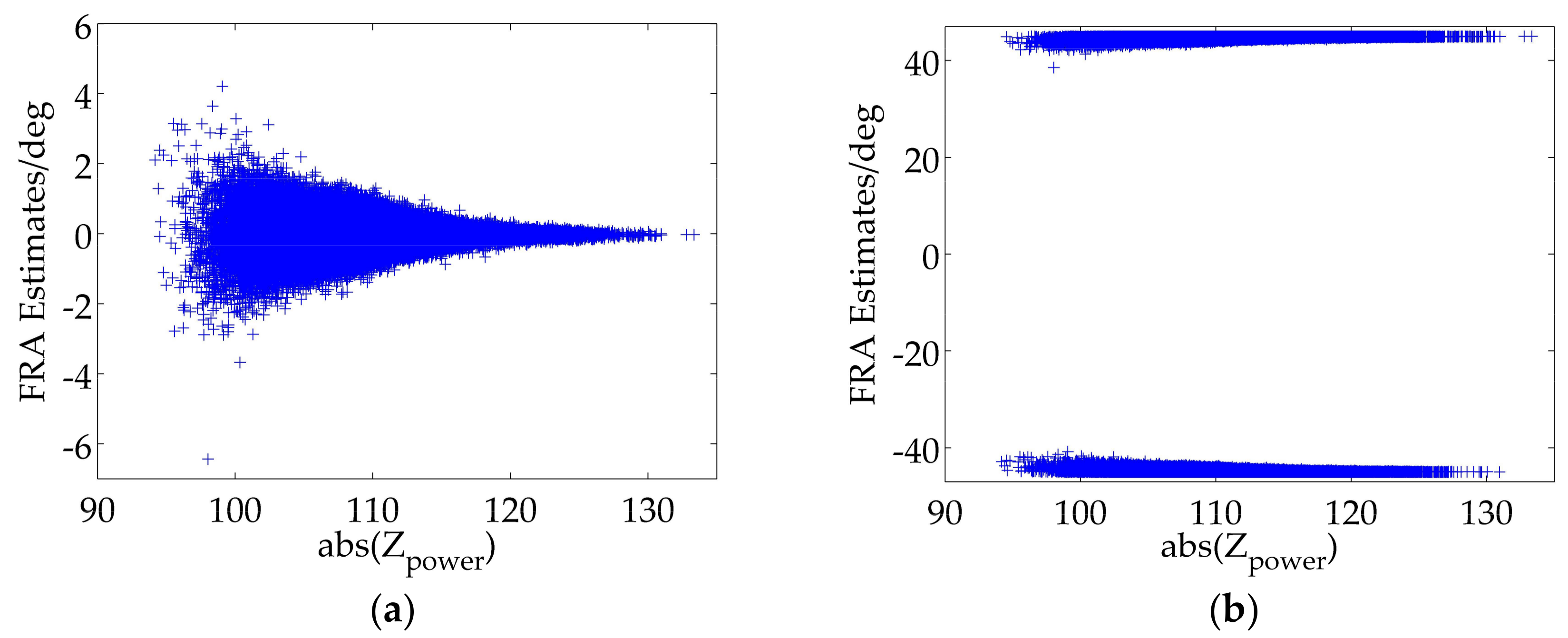
4.1. FRA Ambiguity Analysis
4.2. Pixel-Level and Image-Level Ambiguity
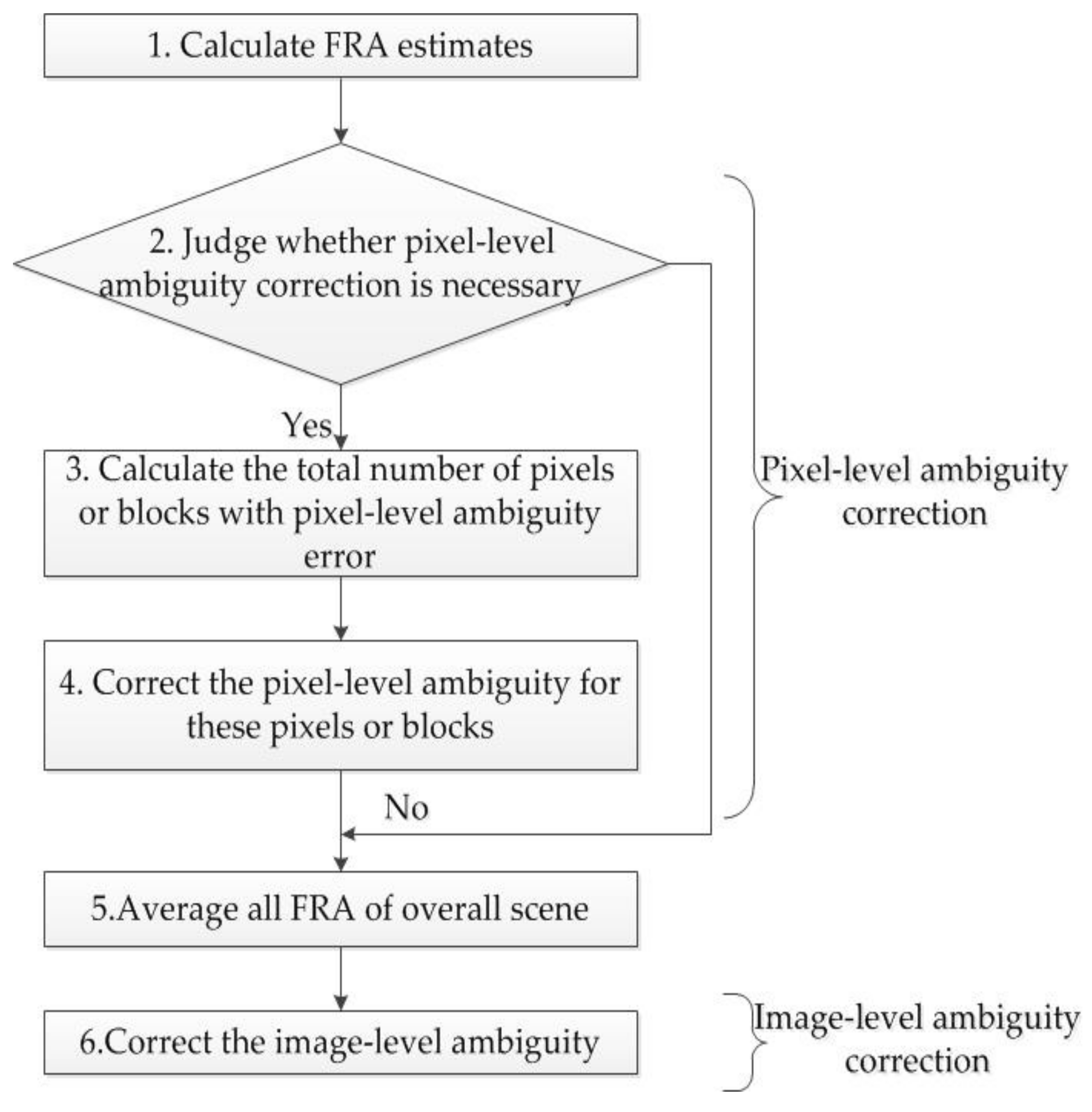
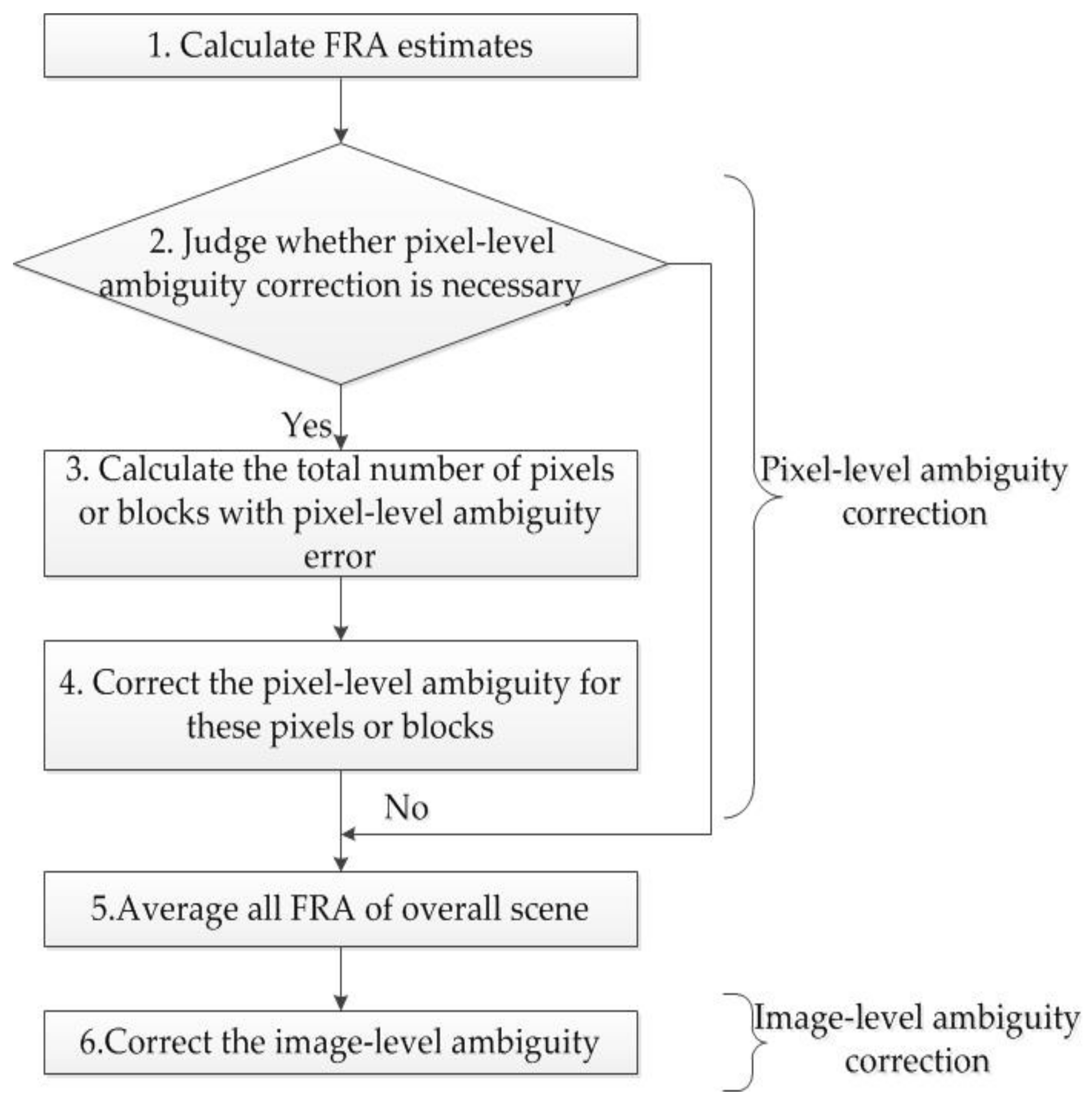
4.3. A Novel Strategy for FRA Ambiguity Correction
5. Experimental Verification
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Xu, Z.W.; Wu, J.; Wu, Z.S. A survey of ionosphere effects on space-based radar. Waves Random Media 2004, 14, 189–273. [Google Scholar] [CrossRef]
- Li, L.; Zhang, Y.S.; Dong, Z.; Liang, D.N. Ionospheric polarimetric dispersion effect on low-frequency spaceborne SAR imaging. IEEE Geosci. Remote Sens. Lett. 2014, 11, 2163–2167. [Google Scholar] [CrossRef]
- Ji, Y.F.; Zhang, Q.L.; Zhang, Y.S.; Dong, Z. L-band geosynchronous SAR imaging degradations imposed by ionospheric irregularities. China Sci. Inf. Sci. 2017, 60, 1–13. [Google Scholar] [CrossRef]
- Ji, Y.F.; Zhang, Q.L.; Zhang, Y.S.; Dong, Z. Analysis of background ionospheric effects on geosynchronous SAR imaging. Radioengineering 2017, 26, 130–138. [Google Scholar] [CrossRef]
- Qi, R.Y.; Jin, Y.Q. Analysis of the effects of the Faraday rotation on spaceborne polarimetric SAR observations at P-band. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1115–1122. [Google Scholar] [CrossRef]
- Gail, W.B. Effect of Faraday rotation on polarimetric SAR. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 301–308. [Google Scholar] [CrossRef]
- Wright, P.A.; Quegan, S. Faraday rotation effects on L-Band spaceborne SAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 2735–2744. [Google Scholar] [CrossRef]
- Chen, J.; Quegan, S. Improved estimators of Faraday rotation in spaceborne polarimetric SAR data. IEEE Geosci. Remote Sens. Lett. 2010, 7, 846–850. [Google Scholar] [CrossRef]
- Li, L.; Zhang, Y.S. New Faraday rotation estimators based on polarimetric covariance matrix. IEEE Geosci. Remote Sens. Lett. 2014, 11, 133–137. [Google Scholar] [CrossRef]
- Freeman, A.; Saatchi, S.S. On the detection of Faraday rotation in linearly polarized L-band SAR backscatter signatures. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1607–1616. [Google Scholar] [CrossRef]
- Freeman, A. Calibration of linearly polarized polarimetric SAR data subject to Faraday rotation. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1617–1624. [Google Scholar] [CrossRef]
- Wang, C.; Liu, L. Improved TEC retrieval based on spaceborne PolSAR data. IEEE Trans. Geosci. Remote Sens. 2017, 52, 288–304. [Google Scholar] [CrossRef]
- Bickel, S.H.; Bates, R.H.T. Effects of magneto-ionic propagation on the polarization scattering matrix. Proc. IEEE 1965, 53, 1089–1091. [Google Scholar] [CrossRef]
- Meyer, F.J.; Nicoll, J.B. Prediction, detection, and correction of Faraday rotation in full-polarimetric L-band SAR data. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3076–3086. [Google Scholar] [CrossRef]
- Rogers, N.C.; Quegan, S. The Accuracy of Faraday Rotation Estimation in Satellite Synthetic Aperture Radar Images. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4799–4807. [Google Scholar] [CrossRef]
- Burgin, M.; Moghaddam, M. Mitigation of Faraday Rotation effect for long-wavelength synthetic spaceborne radar data. In Proceedings of the 2014 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Quebec City, QC, Canada, 13–18 July 2014. [Google Scholar]
- Guo, W.; Chen, J. Quantitative analysis of Faraday rotation impacts on image formation of spaceborne VHF/UHF-SAR. In Proceedings of the 2014 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Quebec City, QC, Canada, 13–18 July 2014. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scene Area | Bohai of China | Western Mongolia | South Tibet | Alaska of American |
|---|---|---|---|---|
| 2.9253° | 3.8961° | 4.0675° | 3.7893° | |
| 0.3183° | 2.4603° | 0.5129° | 1.9149° | |
| 0.2816° | 2.2970° | 0.5767° | 1.7350° | |
| 0.2544° | 2.2721° | 0.4965° | 1.6973° | |
| 0.3099° | 2.5461° | 0.5904° | 1.9300° |
| True FRA | Folding FRA | Before Pixel-Level Correction | After Pixel-Level Correction |
|---|---|---|---|
| 60° | −30° | −30.0022° | −30.0022° |
| 95° | 5° | 4.9978° | 4.9978° |
| 135° | 45° | 0.9256° | 44.9978° |
| 136° | −44° | −43.6561° | −44.0022° |
| 224° | 44° | 43.6095° | 43.9978° |
| 320° | −40° | −40.0022° | −40.0022° |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Ji, Y.; Zhang, Y.; Zhang, Q.; Huang, H.; Dong, Z. A Novel Strategy of Ambiguity Correction for the Improved Faraday Rotation Estimator in Linearly Full-Polarimetric SAR Data. Sensors 2018, 18, 1158. https://doi.org/10.3390/s18041158
Li J, Ji Y, Zhang Y, Zhang Q, Huang H, Dong Z. A Novel Strategy of Ambiguity Correction for the Improved Faraday Rotation Estimator in Linearly Full-Polarimetric SAR Data. Sensors. 2018; 18(4):1158. https://doi.org/10.3390/s18041158
Chicago/Turabian StyleLi, Jinhui, Yifei Ji, Yongsheng Zhang, Qilei Zhang, Haifeng Huang, and Zhen Dong. 2018. "A Novel Strategy of Ambiguity Correction for the Improved Faraday Rotation Estimator in Linearly Full-Polarimetric SAR Data" Sensors 18, no. 4: 1158. https://doi.org/10.3390/s18041158