Research into Kinect/Inertial Measurement Units Based on Indoor Robots



Abstract
:1. Introduction
2. Independent Localization Based on Kinect and INS
2.1. Kinect Method
2.1.1. Kinect Obtaining 3D Point Cloud Data
2.1.2. Absolute Orientation Algorithm
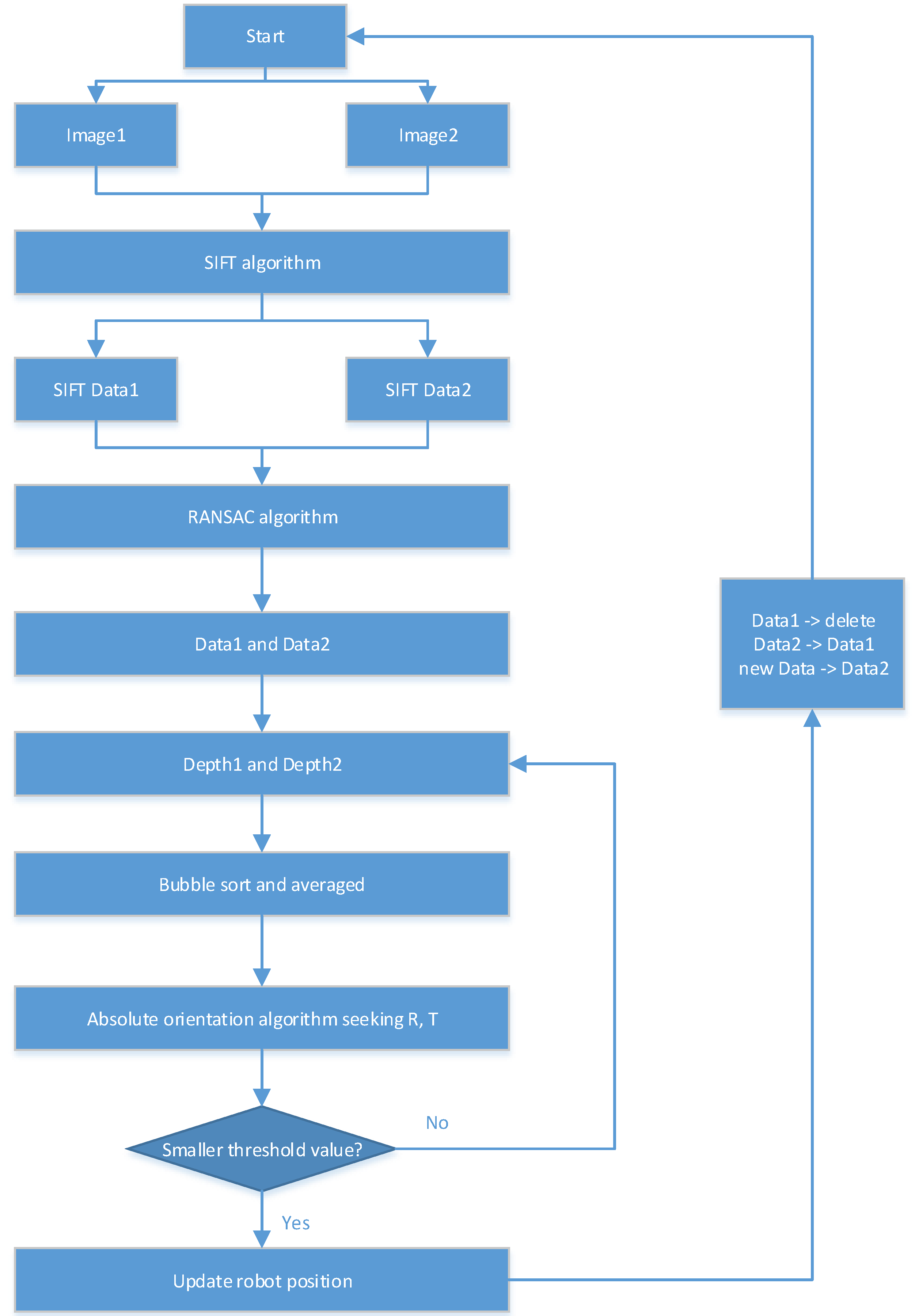
2.1.3. Implementation of Kinect Self-Localization Algorithm
2.2. Principle and Algorithm Design of SINS
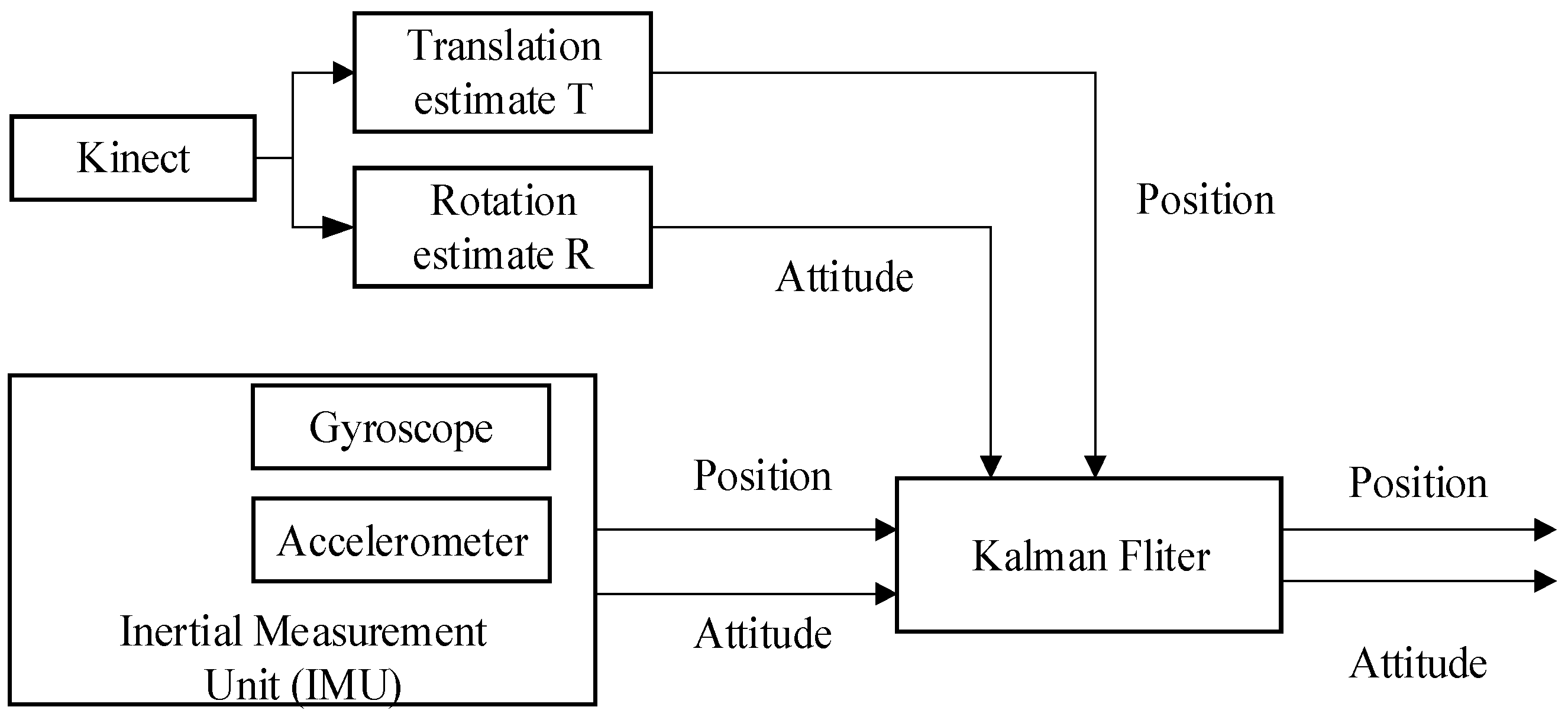
3. Integrated Navigation Scheme
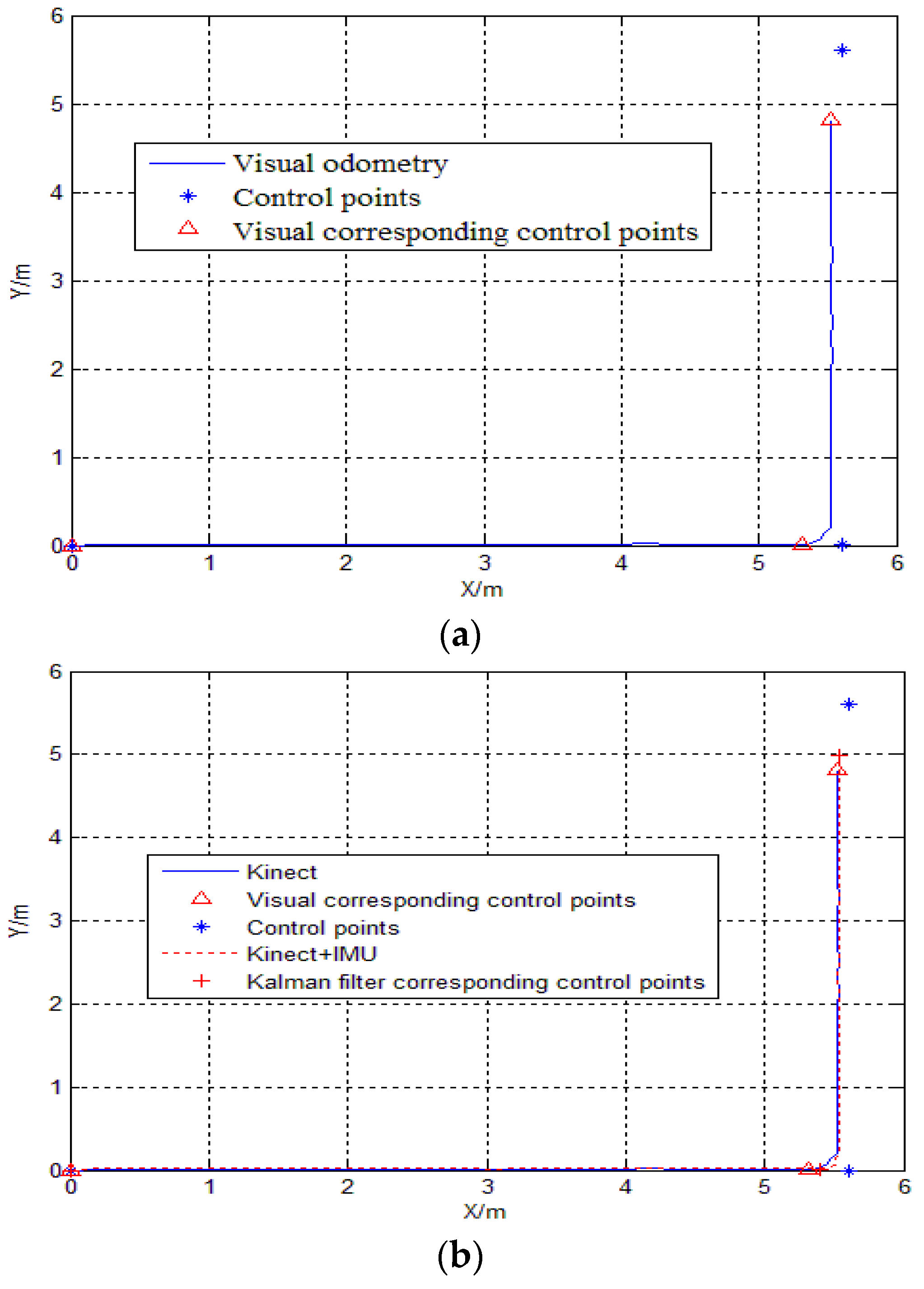
4. Indoor Positioning Experiment
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wu, H.B.; Huang, J.F.; Yang, X.N.; Ye, J.H.; He, S.M. A Robot Collision Avoidance Method Using Kinect and Global Vision. Telkomnika 2017, 15, 4–17. [Google Scholar] [CrossRef]
- Cunha, J.; Pedrosa, E.; Cruz, C.; Neves, A.J.; Lau, N. Using a Depth Camera for Indoor Robot Localization and Navigation. Ind. Organ. India 2011, 116, 823–831. [Google Scholar]
- Huai, J.; Zhang, Y.; Yilmaz, A. Real-time large scale 3D reconstruction by fusing Kinect and IMU data. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, II-3-W5, 491–496. [Google Scholar] [CrossRef]
- Um, D.; Ryu, D.; Kal, M. Multiple intensity differentiation for 3-D surface reconstruction with mono-vision infrared proximity array sensor. IEEE Sens. J. 2011, 11, 3352–3358. [Google Scholar] [CrossRef]
- Pan, S.W.; Shi, L.W.; Guo, S.X. A Kinect-Based Real-Time Compressive Tracking Prototype System for Amphibious Spherical Robots. Sensors 2015, 15, 8232–8252. [Google Scholar] [CrossRef] [PubMed]
- Noel, R.R.; Salekin, A.; Islam, R.; Rahaman, S.; Hasan, R.; Ferdous, H.S. A natural user interface classroom based on Kinect. IEEE Learn. Technol. 2011, 13, 59–61. [Google Scholar]
- Zhou, H.K. A Study of Movement Attitude Capture System Based on Kinect. Rev. Fac. Ing. 2017, 32, 210–215. [Google Scholar]
- Stowers, J.; Hayes, M.; Bainbridge-Smith, A. Altitude control of a quadrotor helicopter using depth map from Microsoft Kinect sensor. In Proceedings of the 2011 IEEE International Conference on Mechatronics (ICM), Istanbul, Turkey, 1 August 2011; pp. 358–362. [Google Scholar]
- Zhang, Y.; Gao, J.C.; Xu, S.M. Research on Vision Location Algorithm Based on Kinect in Complex Condition. Mach. Electron. 2017, 35, 72–80. [Google Scholar]
- Wang, Z.Y.; He, B.W. Study of Self-localization of Indoor Robot Based on Kinect Sensor. Mach. Build. Autom. 2014, 5, 154–157. [Google Scholar]
- Clark, R.A.; Bower, K.J.; Mentiplay, B.F.; Paterson, K.; Pua, Y.-H. Concurrent validity of the Microsoft Kinect for assessment of spatiotemporal gait variables. J. Biomech. 2013, 46, 2722–2725. [Google Scholar] [CrossRef] [PubMed]
- Amidi, O.; Kanade, T.; Fujita, K. A visual odometer for autonomous helicopter flight. Robot. Autonom. Syst. 1999, 28, 185–193. [Google Scholar] [CrossRef]
- Feng, G.; Huang, X. Observability analysis of navigation system using point-based visual and inertial sensors. Opt. Int. J. Light Electron Opt. 2014, 125, 1346–1353. [Google Scholar] [CrossRef]
- Zheng, N.-S.; Yang, H.-C.; Zhang, S.-B. An Absolute Orientation Method Suitable for Digital Close—Range Image. Surv. Mapp. 2008, 33, 111–112. [Google Scholar]
- Lowe, D. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Raguram, R.; Frahm, J.M.; Pollefeys, M. A comparative analysis of RANSAC techniques leading to adaptive real-time random sample consensus. In Proceedings of the Computer Vision—ECCV 2008, European Conference on Computer Vision (DBLP), Marseille, France, 12–18 October 2008; pp. 500–513. [Google Scholar]
- Bortz, J.E. A new mathematical formulation for strapdown inertial navigation. IEEE Trans. Aerosp. Electron. Syst. 2007, AES-7, 61–66. [Google Scholar] [CrossRef]
- Miller, R.B. A new strapdown attitude algorithm. J. Guid. Control Dyn. 2012, 6, 287–291. [Google Scholar] [CrossRef]
- Liu, J.-Y.; Zeng, Q.-H.; Zhao, W. Navigation System Theory and Application; Northwestern Polytechnical University Press: Xi’an, China, 2010. [Google Scholar]
- Lee, J.G.; Mark, J.G.; Tazartes, D.A.; Yong, J.Y. Extension of strapdown attitude algorithm for high-frequency base motion. J. Guid. Control Dyn. 2012, 13, 738–743. [Google Scholar] [CrossRef]
- Wang, C.; Wang, T.; Liang, J.; Chen, Y.; Wu, Y. Monocular vision and IMU based navigation for a small unmanned helicopter. In Proceedings of the 2012 7th IEEE Conference on Industrial Electronics and Applications (ICIEA), Singapore, 18–20 July 2012; pp. 1694–1699. [Google Scholar]
- Sirtkaya, S.; Seymen, B.; Alatan, A.A. Loosely coupled Kalman filtering for fusion of Visual Odometry and inertial navigation. In Proceedings of the 2013 16th International Conference on Information Fusion (FUSION), Istanbul, Turkey, 9–12 July 2013; pp. 219–226. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Control Points | 1 | 2 | 3 |
|---|---|---|---|
| Control Points | (0, 0) | (5.61, 0.01) | (5.60, 5.61) |
| Number of Control Points | 1 | 2 | 3 |
|---|---|---|---|
| The position of the control point | (0.00, 0.00) | (5.61, 0.01) | (5.60, 5.61) |
| Visual position | (0.00, 0.00) | (5.321, 0.0062) | (5.5248, 4.8182) |
| Distance errors (Positioning errors) | 0.00 | 0.2890 | 0.7954 |
| Number of Control Points | 1 | 2 | 3 |
|---|---|---|---|
| Visual odometry | 0.00 | 0.2890 | 0.7954 |
| Kalman filter of Kinect/IMU | 0.00 | 0.2077 | 0.6078 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Wen, X.; Guo, H.; Yu, M. Research into Kinect/Inertial Measurement Units Based on Indoor Robots. Sensors 2018, 18, 839. https://doi.org/10.3390/s18030839
Li H, Wen X, Guo H, Yu M. Research into Kinect/Inertial Measurement Units Based on Indoor Robots. Sensors. 2018; 18(3):839. https://doi.org/10.3390/s18030839
Chicago/Turabian StyleLi, Huixia, Xi Wen, Hang Guo, and Min Yu. 2018. "Research into Kinect/Inertial Measurement Units Based on Indoor Robots" Sensors 18, no. 3: 839. https://doi.org/10.3390/s18030839
APA StyleLi, H., Wen, X., Guo, H., & Yu, M. (2018). Research into Kinect/Inertial Measurement Units Based on Indoor Robots. Sensors, 18(3), 839. https://doi.org/10.3390/s18030839