An Automatic Gait Feature Extraction Method for Identifying Gait Asymmetry Using Wearable Sensors


Abstract
:1. Introduction
2. Design and Methods
2.1. Subjects Selection
2.2. Experimental Protocol and Calibration
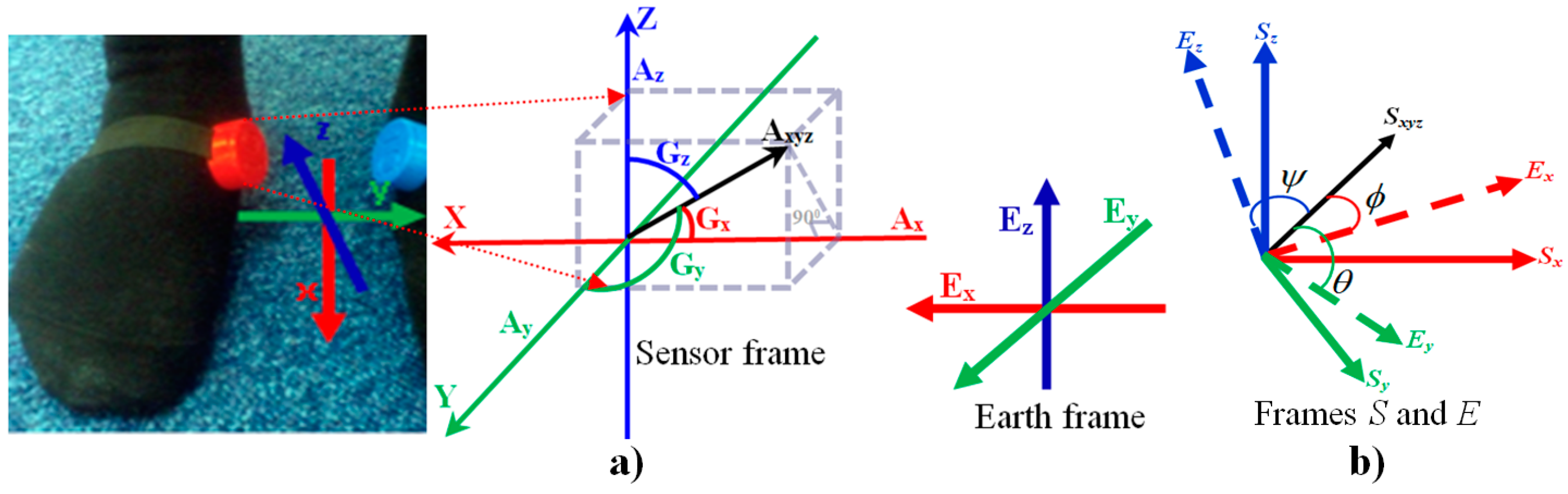
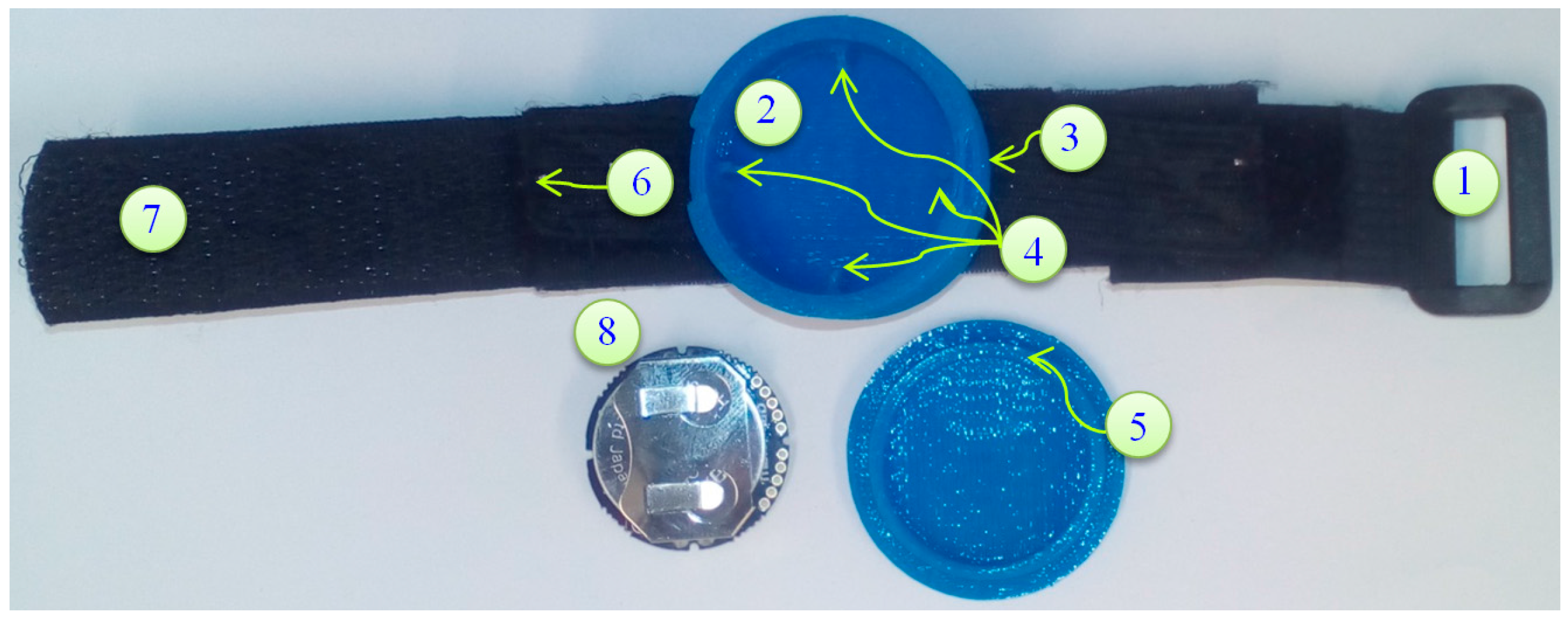
2.3. Sensor Placing Location
2.4. Sensor Selection
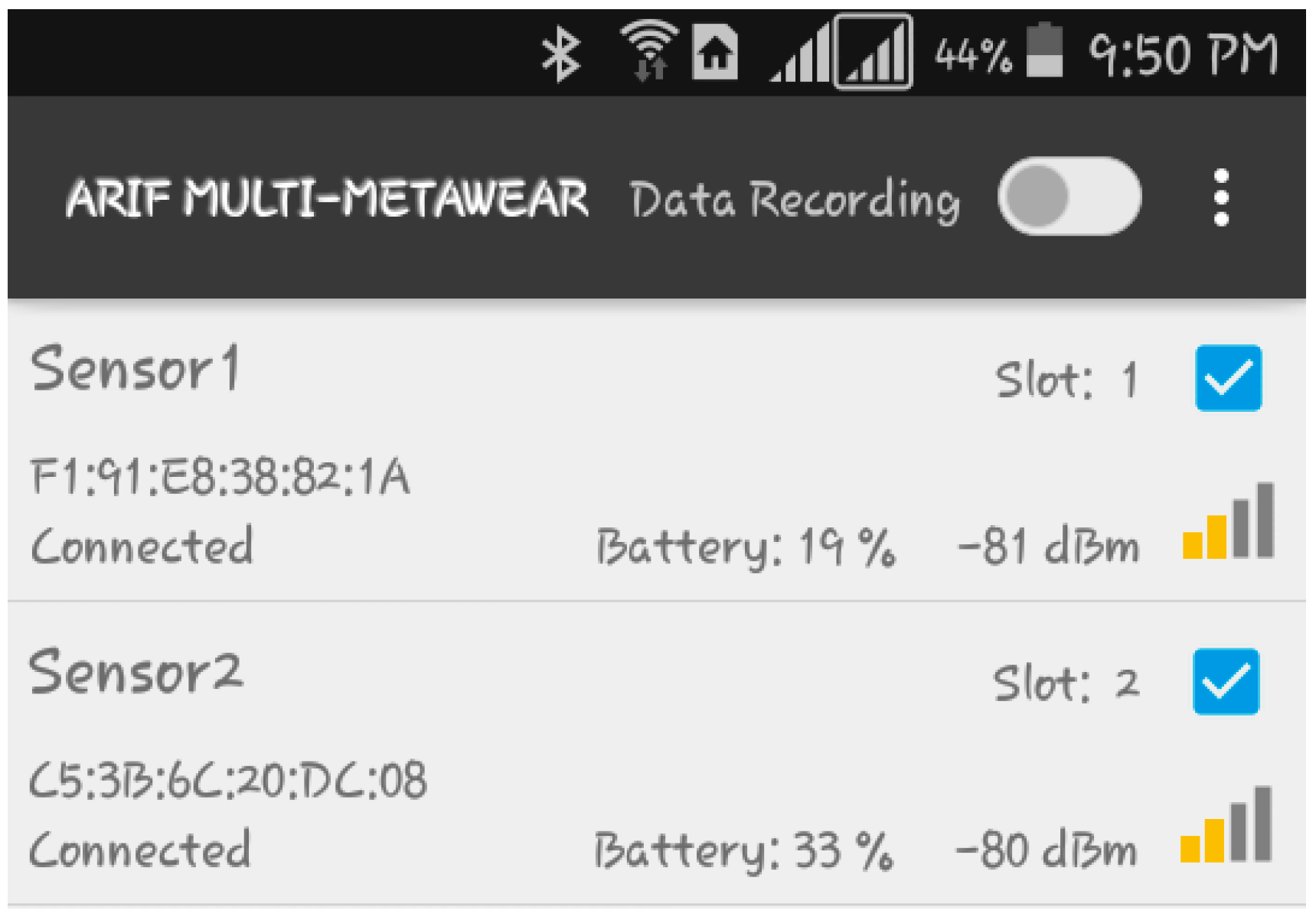
2.5. Android App Design, Development and Data Collection
2.6. Gait Asymmetry Feature Extraction Method
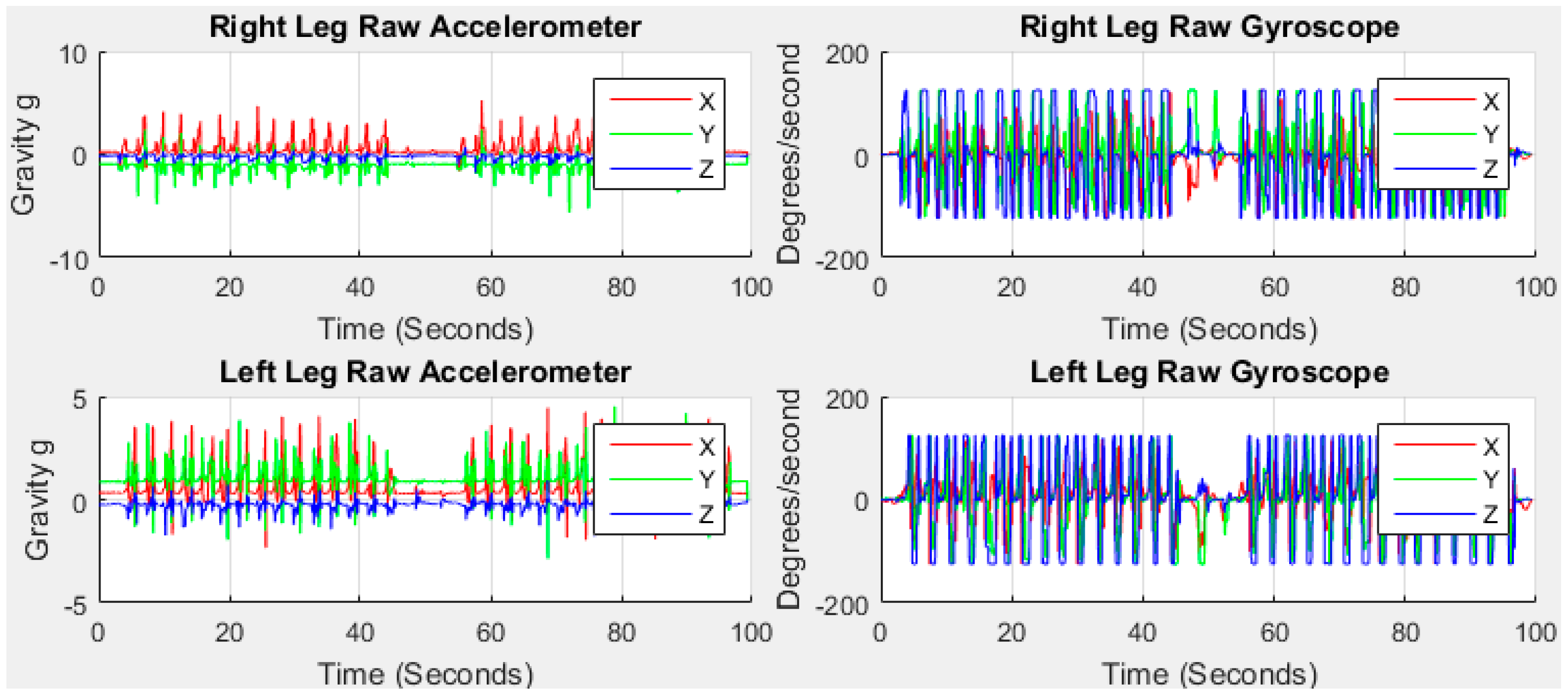
2.6.1. Raw Data Processing
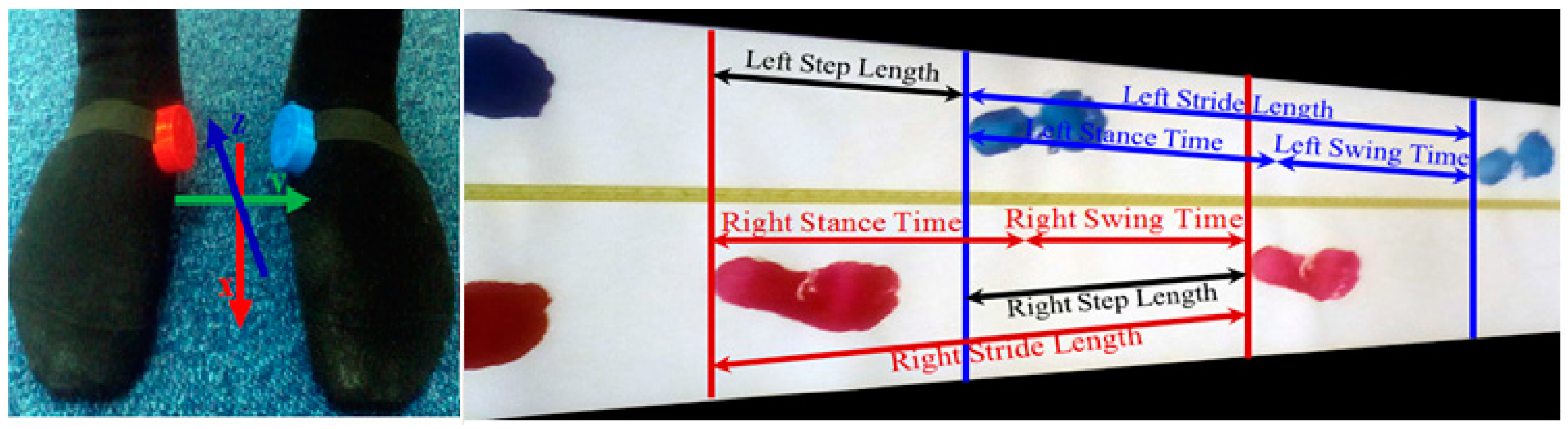
2.6.2. Coordinate Systems
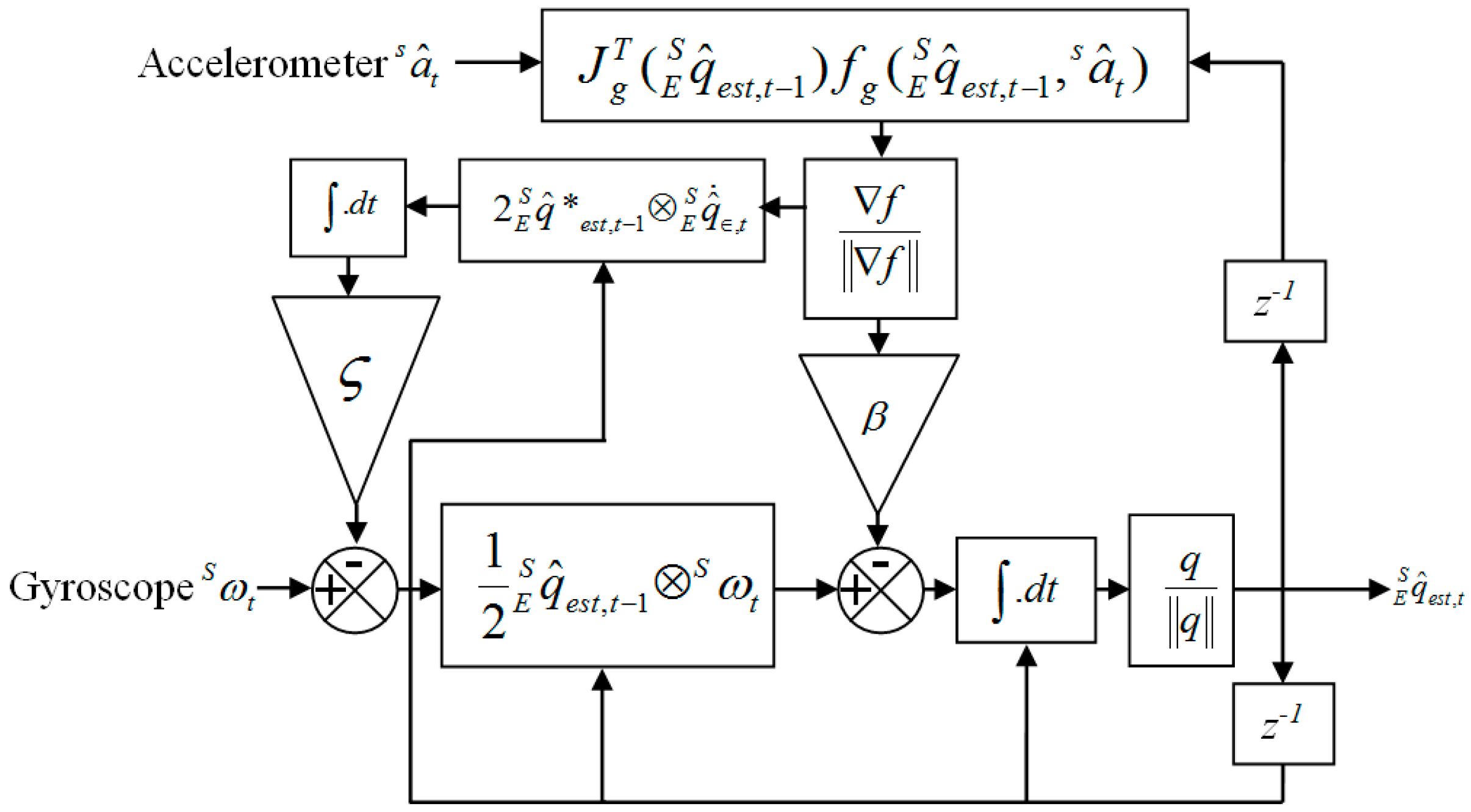
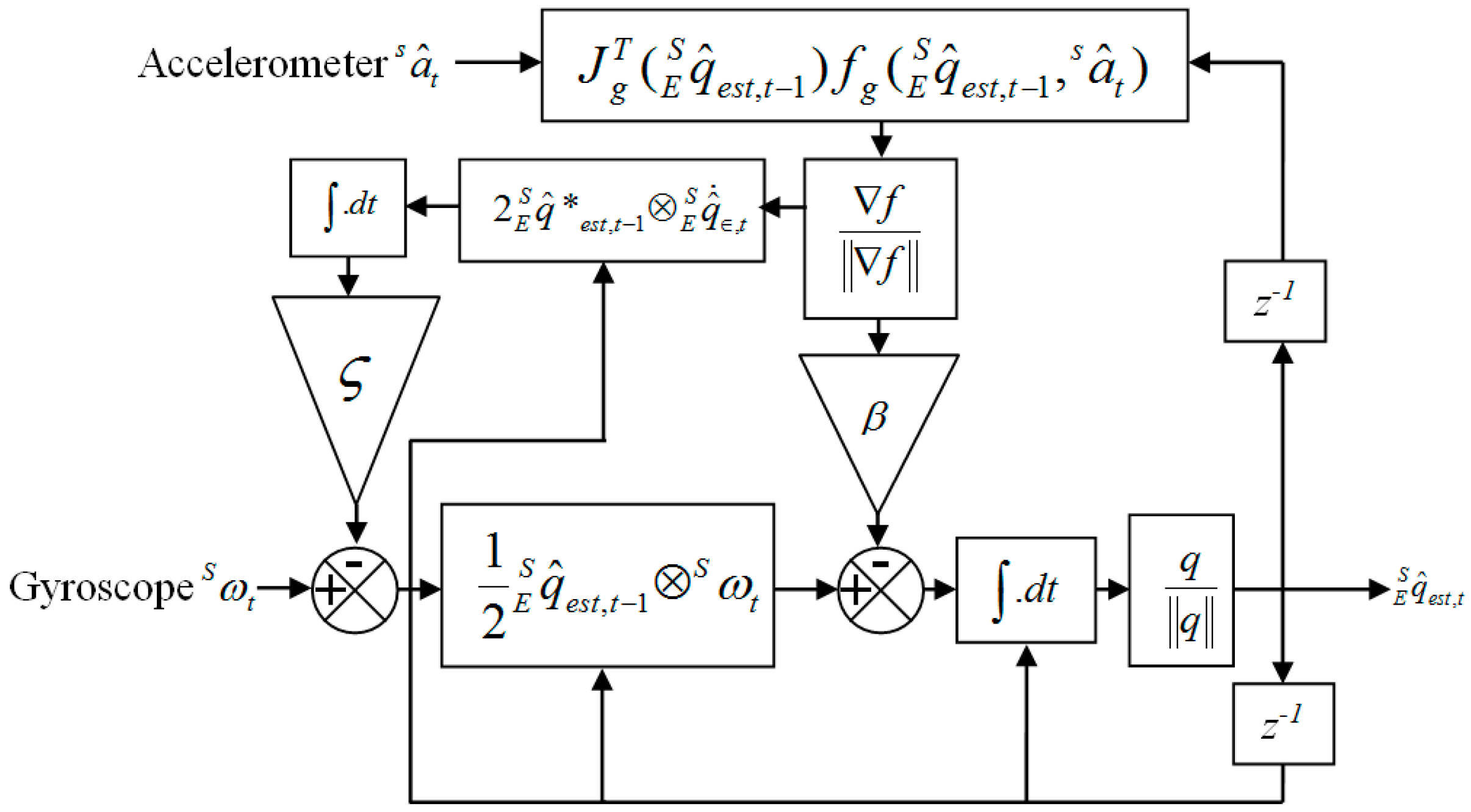
2.6.3. Quaternion
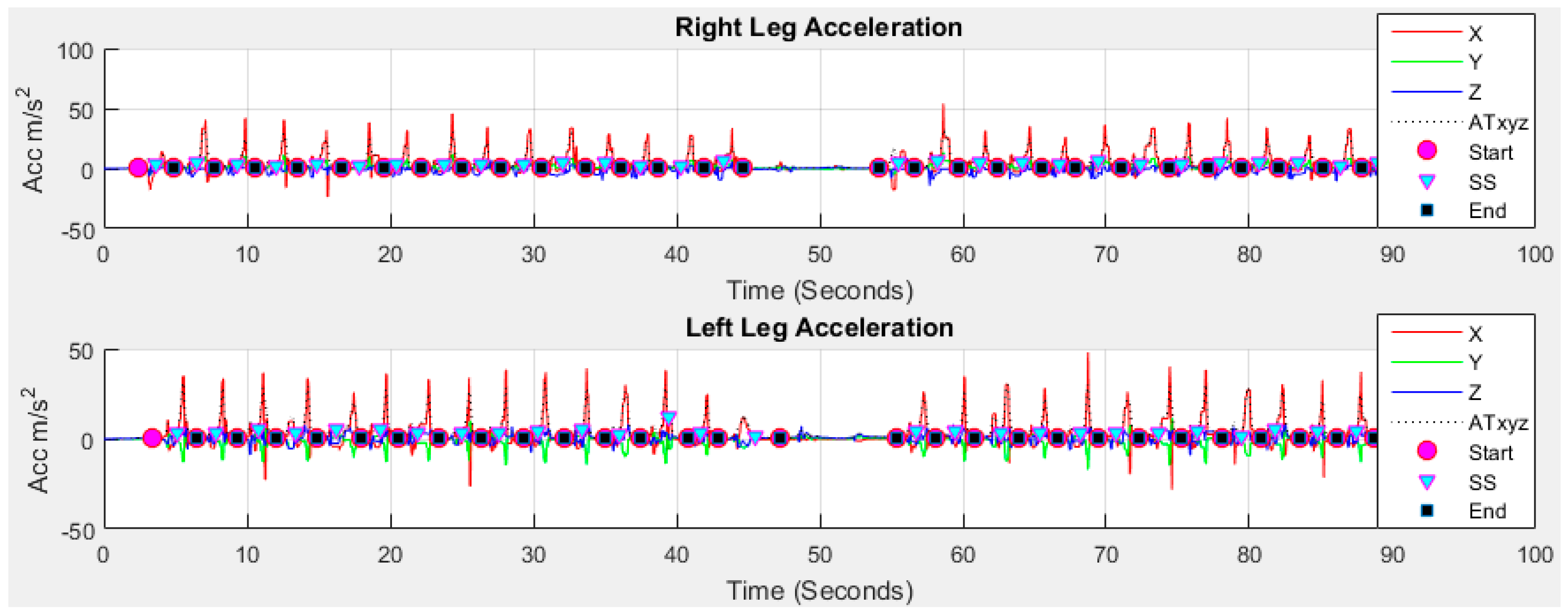
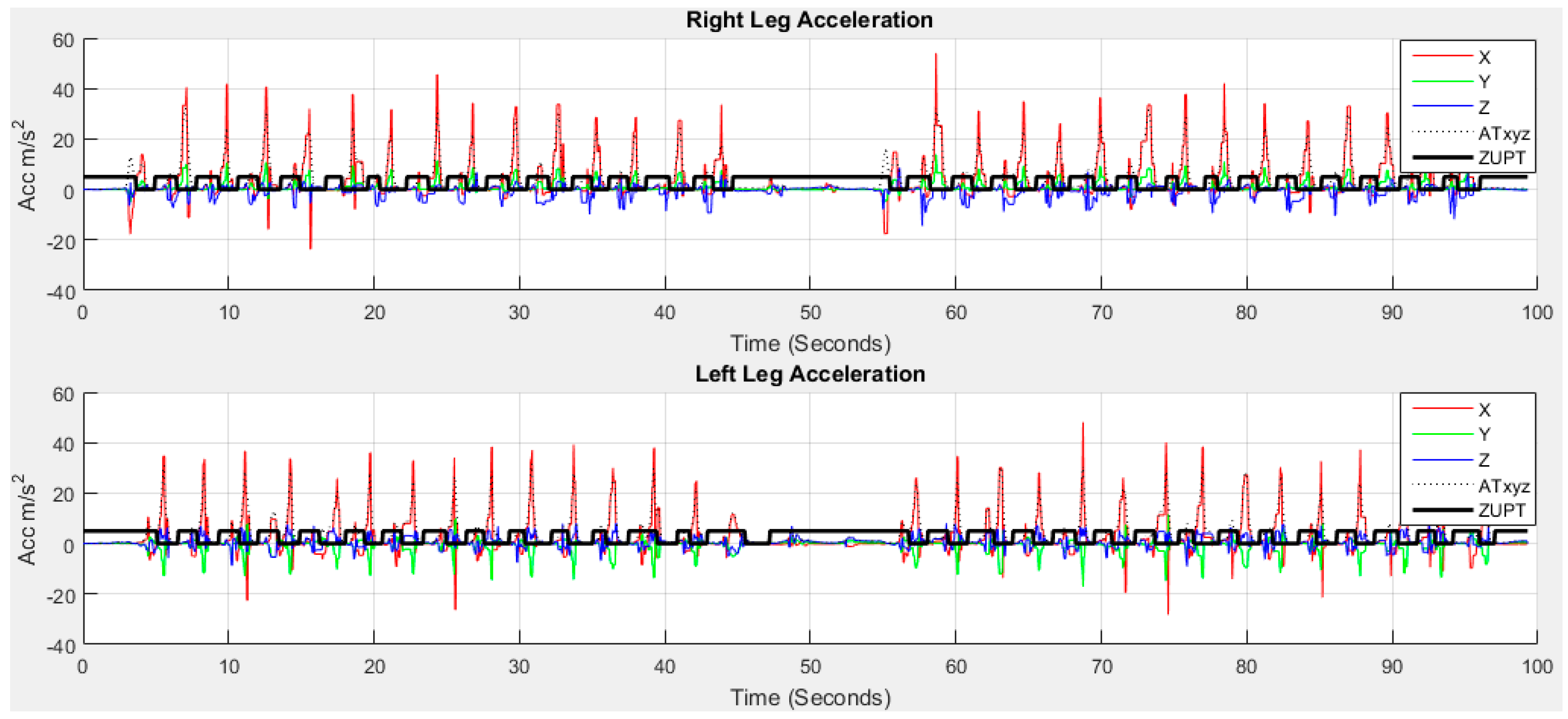
2.6.4. Stride, Stance, Swing and Step Events Detection
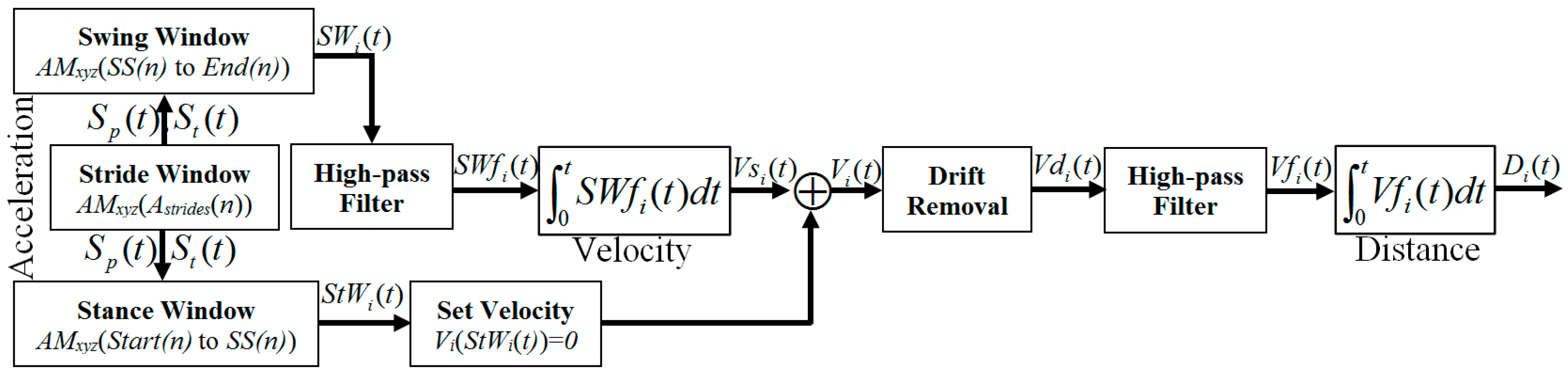
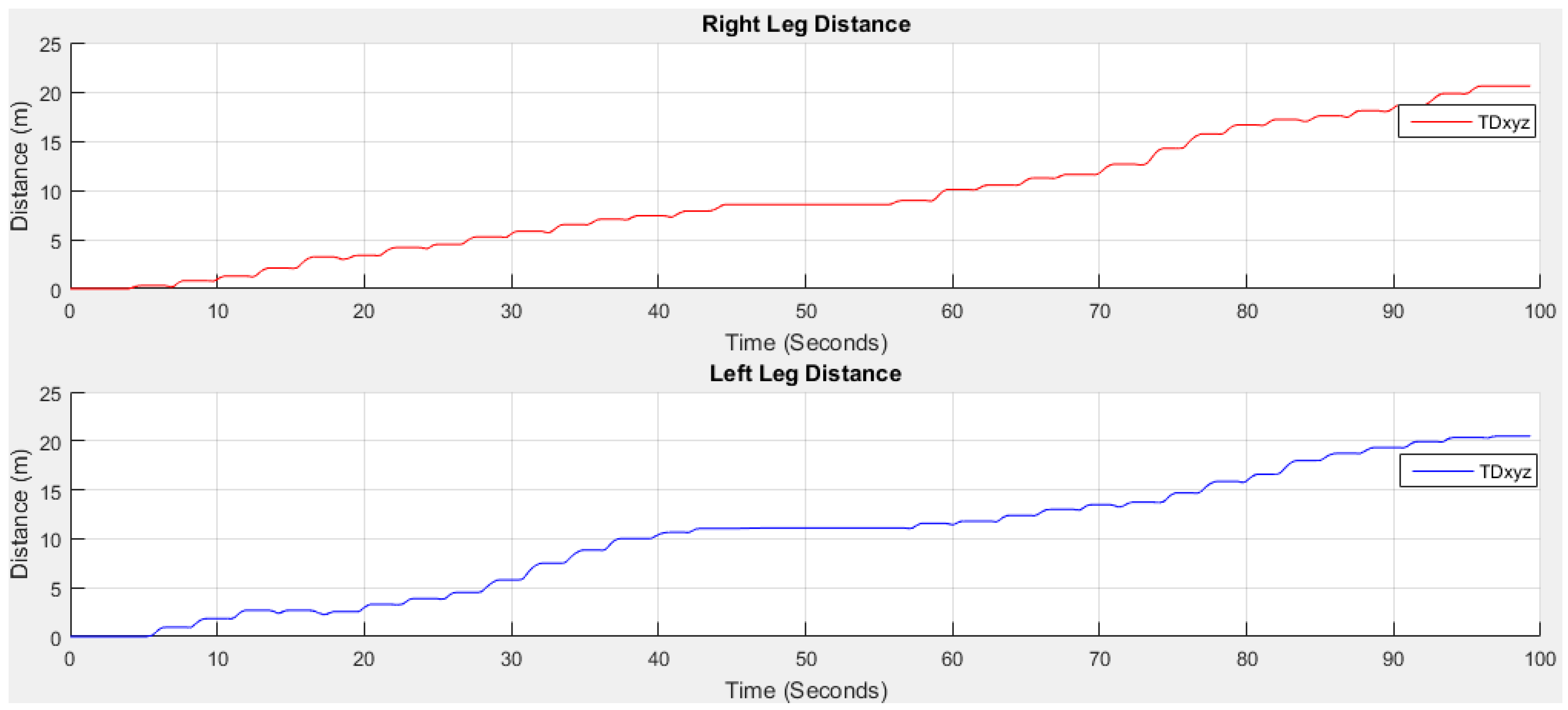
2.6.5. Velocity and Distance Estimation
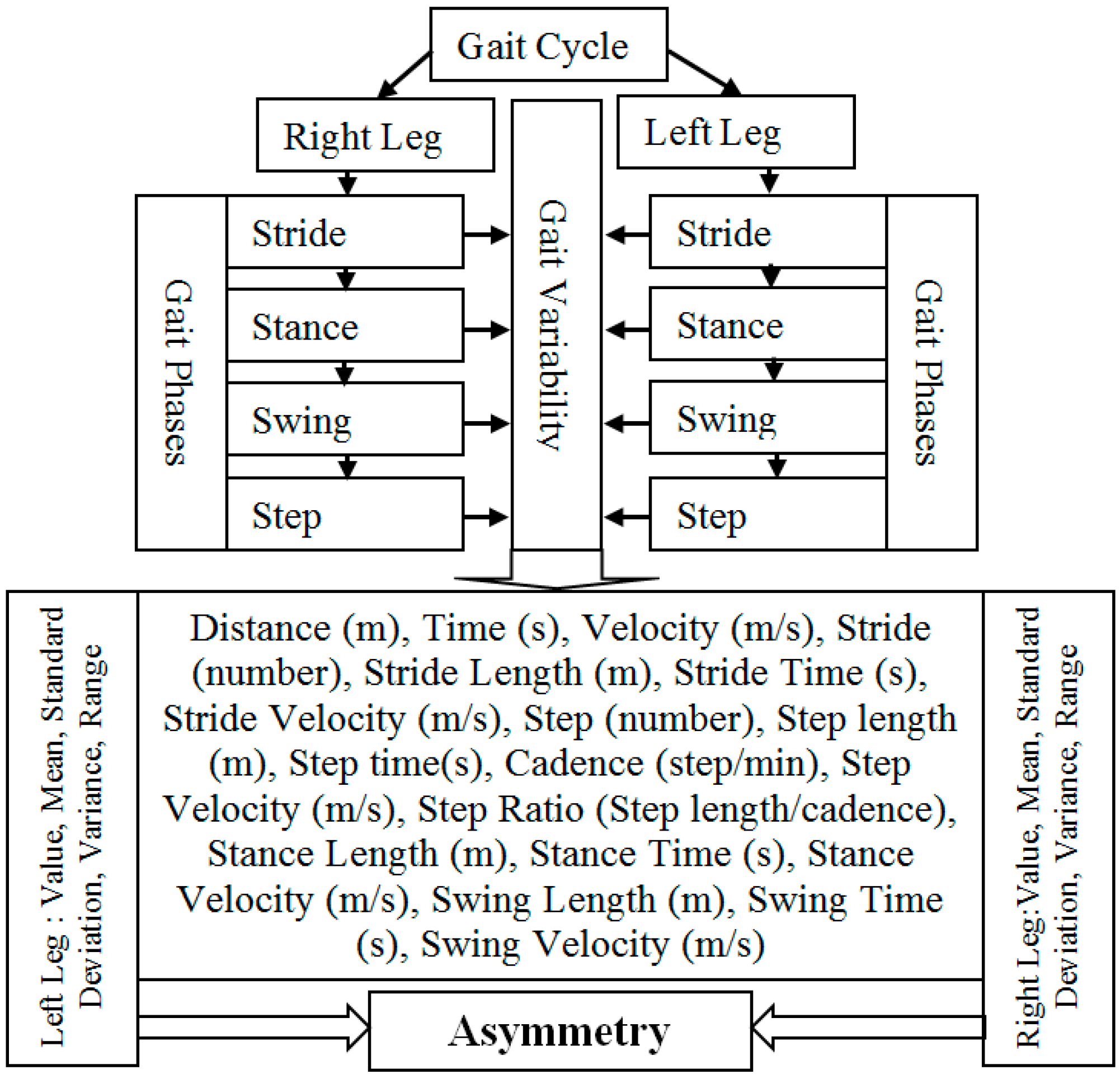
2.6.6. Selection of Gait Asymmetry Variables
2.6.7. Statistical Analysis
3. Experimental Results
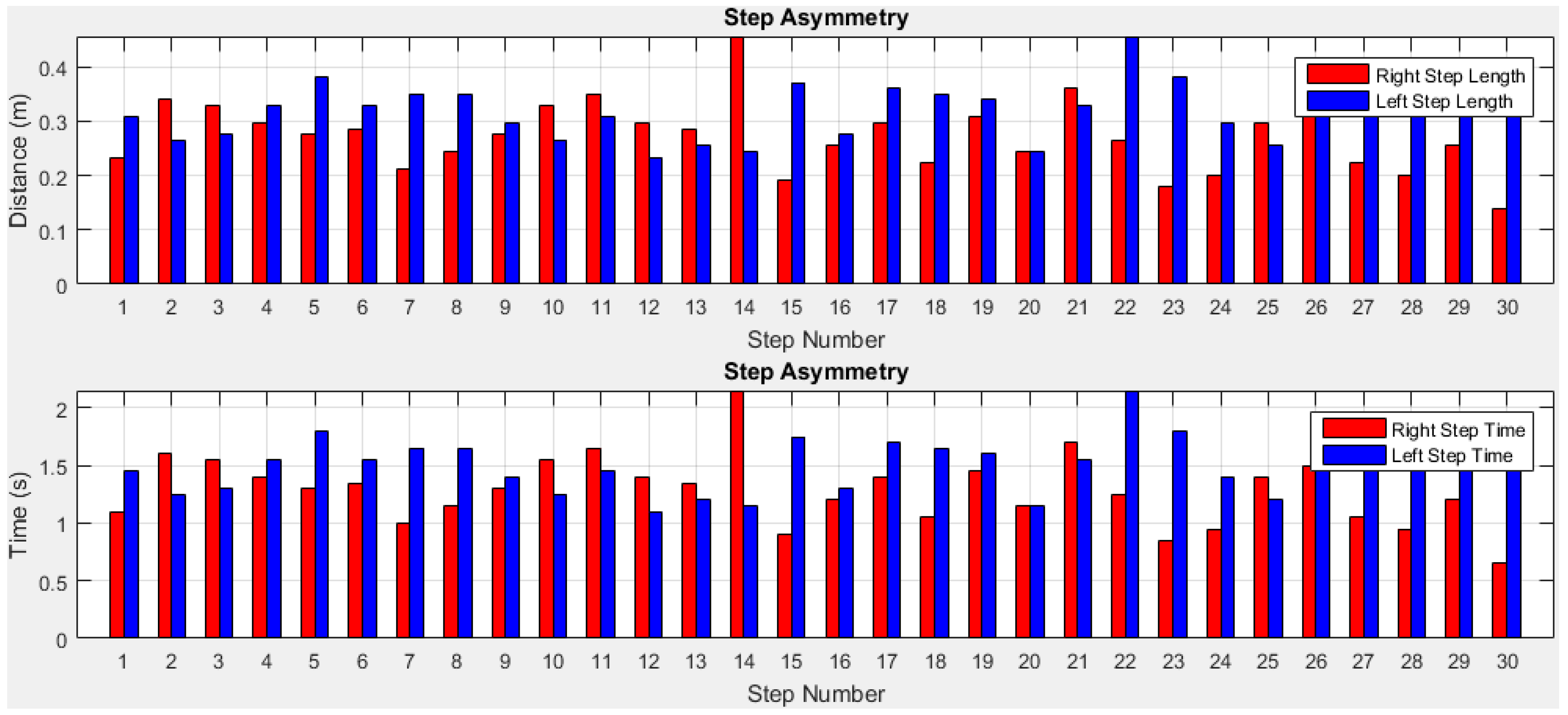
3.1. GA Results of Older Subject 1
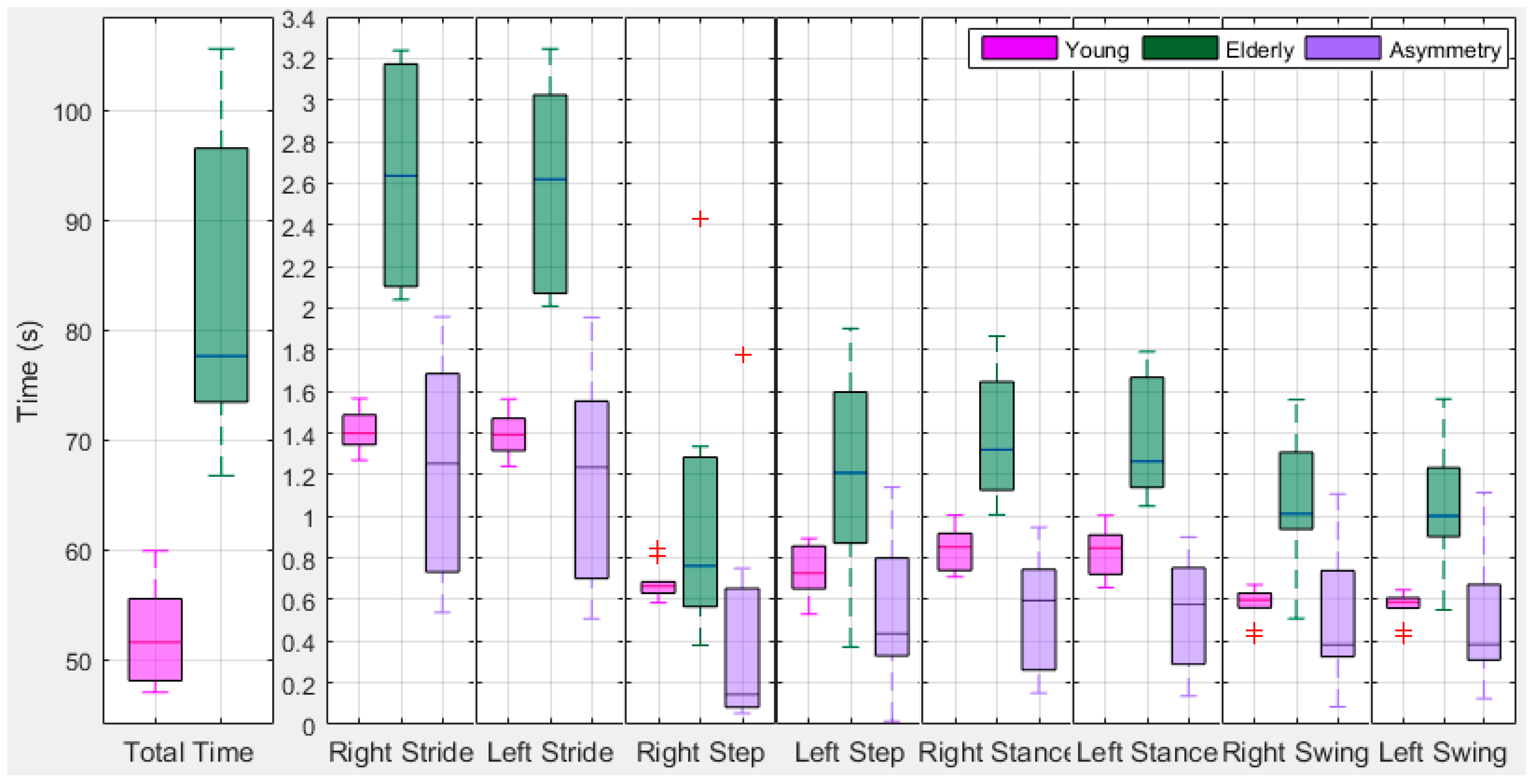
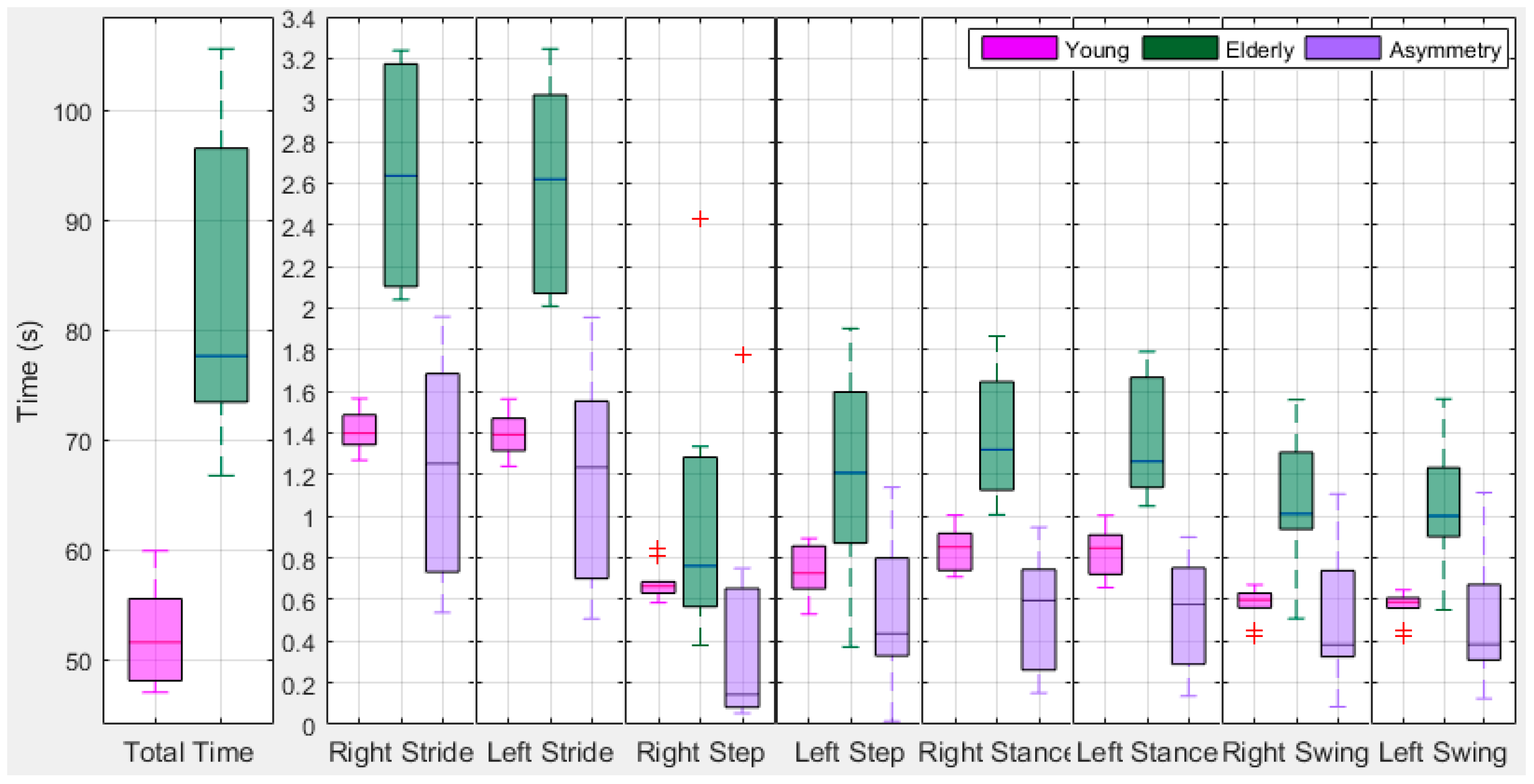
3.2. GA Results of Young and Older Subjects
3.3. Discussion
4. Conclusions
Supplementary Materials
Acknowledgments
Conflicts of Interest
References
- Murray, M.P. Gait as a total pattern of movement: Including a bibliography on gait. Am. J. Phys. Med. Rehabilit. 1967, 46, 290–333. [Google Scholar]
- Muro-de-la-Herran, A.; Garcia-Zapirain, B.; Mendez-Zorrilla, A. Gait analysis methods: An overview of wearable and non-wearable systems, highlighting clinical applications. Sensors 2014, 14, 3362–3394. [Google Scholar] [CrossRef] [PubMed]
- Plotnik, M.; Giladi, N.; Balash, Y.; Peretz, C.; Hausdorff, J.M. Is freezing of gait in parkinson’s disease related to asymmetric motor function? Ann. Neurol. 2005, 57, 656–663. [Google Scholar] [CrossRef] [PubMed]
- Lewek, M.D.; Bradley, C.E.; Wutzke, C.J.; Zinder, S.M. The relationship between spatiotemporal gait asymmetry and balance in individuals with chronic stroke. J. Appl. Biomech. 2014, 30, 31–36. [Google Scholar] [CrossRef] [PubMed]
- Wahab, Y.; Bakar, N.A. Gait Analysis Measurement for Sport Application Based on Ultrasonic System. In Proceedings of the 2011 IEEE 15th International Symposium on Consumer Electronics (ISCE), Singapore, 14–17 June 2011; pp. 20–24. [Google Scholar]
- Steultjens, M.P.M.; Dekker, J.; Baar, M.E.V.; Oostendorp, R.A.B.; Bijlsma, J.W.J. Range of joint motion and disability in patients with osteoarthritis of the knee or hip. Rheumatology 2000, 39, 955–961. [Google Scholar] [CrossRef] [PubMed]
- Bora, N.M.; Molke, G.V.; Munot, H.R. Understanding human gait: A survey of traits for biometrics and biomedical applications. In Proceedings of the 2015 International Conference on Energy Systems and Applications, Pune, India, 30 October–1 November 2015; pp. 723–728. [Google Scholar]
- Yogev, G.; Plotnik, M.; Peretz, C.; Giladi, N.; Hausdorff, J.M. Gait asymmetry in patients with parkinson’s disease and elderly fallers: When does the bilateral coordination of gait require attention? Exp. Brain Res. 2007, 177, 336–346. [Google Scholar] [CrossRef] [PubMed]
- Plotnik, M.; Dagan, Y.; Gurevich, T.; Giladi, N.; Hausdorff, J.M. Effects of cognitive function on gait and dual tasking abilities in patients with parkinson’s disease suffering from motor response fluctuations. Exp. Brain Res. 2011, 208, 169–179. [Google Scholar] [CrossRef] [PubMed]
- Caldas, R.; Mundt, M.; Potthast, W.; Buarque, F.; Markert, B. A systematic review of gait analysis methods based on inertial sensors and adaptive algorithms. Gait Posture 2017, 57, 204–210. [Google Scholar] [CrossRef] [PubMed]
- Kirtley, C. Clinical Gait Analysis: Theory and Practice; Elsevier Health Sciences: Philadelphia, PA, USA, 2006. [Google Scholar]
- Jarchi, D.; Lo, B.; Wong, C.; Ieong, E.; Nathwani, D.; Yang, G.-Z. Gait analysis from a single ear-worn sensor: Reliability and clinical evaluation for orthopaedic patients. IEEE Trans. Neural Syst. Rehabilit. Eng. 2016, 24, 882–892. [Google Scholar] [CrossRef] [PubMed]
- Auvinet, E.; Multon, F.; Manning, V.; Meunier, J.; Cobb, J.P. Validity and sensitivity of the longitudinal asymmetry index to detect gait asymmetry using microsoft kinect data. Gait Posture 2017, 51, 162–168. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Su, B.L.; Song, R.; Guo, L.Y.; Yen, C.W. Characterizing gait asymmetry via frequency sub-band components of the ground reaction force. Biomed. Signal Process. Control 2015, 18, 56–60. [Google Scholar] [CrossRef]
- Bervet, K.; Bessette, M.; Godet, L.; Crétual, A. Ker-egi, a new index of gait quantification based on electromyography. J. Electromyogr. Kinesiol. 2013, 23, 930–937. [Google Scholar] [CrossRef] [PubMed]
- Williams, A.J.; Peterson, D.S.; Earhart, G.M. Gait coordination in Parkinson disease: Effects of step length and cadence manipulations. Gait Posture 2013, 38, 340–344. [Google Scholar] [CrossRef] [PubMed]
- Brach, J.S.; VanSwearingen, J.M. Physical impairment and disability: Relationship to performance of activities of daily living in community-dwelling older men. Phys. Ther. 2002, 82, 752–761. [Google Scholar] [PubMed]
- Hess, R.J.; Brach, J.S.; Piva, S.R.; VanSwearingen, J.M. Walking skill can be assessed in older adults: Validity of the figure-of-8 walk test. Phys. Ther. 2010, 90, 89–99. [Google Scholar] [CrossRef] [PubMed]
- Duncan, R.P.; Earhart, G.M. Four square step test performance in people with Parkinson disease. J. Neurol. Phys. Ther. 2013, 37, 2–8. [Google Scholar] [CrossRef] [PubMed]
- Wrisley, D.M.; Kumar, N.A. Functional gait assessment: Concurrent, discriminative, and predictive validity in community-dwelling older adults. Phys. Ther. 2010, 90, 761–773. [Google Scholar] [CrossRef] [PubMed]
- Bossers, W.J.R.; van der Woude, L.H.V.; Boersma, F.; Scherder, E.J.A.; van Heuvelen, M.J.G. The groningen meander walking test: A dynamic walking test for older adults with dementia. Phys. Ther. 2014, 94, 262–272. [Google Scholar] [CrossRef] [PubMed]
- Berg, K.O.; Wood-Dauphinee, S.L.; Williams, J.I.; Maki, B. Measuring balance in the elderly: Validation of an instrument. Can. J. Public Health 1992, 83, 7–11. [Google Scholar]
- Agostini, V.; Knaflitz, M.; Antenucci, L.; Lisco, G.; Gastaldi, L.; Tadano, S. Wearable sensors for gait analysis. In Proceedings of the 2015 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Torino, Italy, 7–9 May 2015; pp. 146–150. [Google Scholar]
- Urbanek, J.K.; Harezlak, J.; Glynn, N.W.; Harris, T.; Crainiceanu, C.; Zipunnikov, V. Stride variability measures derived from wrist- and hip-worn accelerometers. Gait Posture 2017, 52, 217–223. [Google Scholar] [CrossRef] [PubMed]
- Hanly, R.; Doyle, F.; Whitehouse, S.; Timperley, A. Outpatient 3-d gait analysis one year after THA using a portable IMU system. Orthop. Proceed. 2016, 98-B, 1. [Google Scholar]
- Esser, P.; Howells, K.; Dawes, H.; Collet, J. Gait Asymmetry Measurement. U.S. Patent 14/122,344, 24 April 2014. [Google Scholar]
- Rispens, S.M.; Van Dieën, J.H.; Van Schooten, K.S.; Cofré Lizama, L.E.; Daffertshofer, A.; Beek, P.J.; Pijnappels, M. Fall-related gait characteristics on the treadmill and in daily life. J. NeuroEng. Rehabilit. 2016, 13, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Okuda, S.; Takano, S.; Ueno, M.; Hara, Y.; Chida, Y.; Ikkaku, T.; Kanda, F.; Toda, T. Gait analysis of patients with parkinson’s disease using a portable triaxial accelerometer. Neurol. Clin. Neurosci. 2016, 4, 93–97. [Google Scholar] [CrossRef]
- Kitagawa, N.; Ogihara, N. Estimation of foot trajectory during human walking by a wearable inertial measurement unit mounted to the foot. Gait Posture 2016, 45, 110–114. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.A.; Cho, S.H.; Lee, J.W.; Lee, K.H.; Yang, H.K. Wearable accelerometer system for measuring the temporal parameters of gait. In Proceedings of the 2007 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Lyon, France, 22–26 August 2007; pp. 483–486. [Google Scholar]
- Chung, P.C.; Hsu, Y.L.; Wang, C.Y.; Lin, C.W.; Wang, J.S.; Pai, M.C. Gait analysis for patients with alzheimer’s disease using a triaxial accelerometer. In Proceedings of the 2012 IEEE International Symposium on Circuits and Systems, Seoul, Korea, 20–23 May 2012; pp. 1323–1326. [Google Scholar]
- Kavanagh, J.J. Lower trunk motion and speed-dependence during walking. J. Neuroeng. Rehabilit. 2009, 6, 9. [Google Scholar] [CrossRef] [PubMed]
- Song, Y.; Shin, S.; Kim, S.; Lee, D.; Lee, K.H. Speed estimation from a tri-axial accelerometer using neural networks. In Proceedings of the 2007 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Lyon, France, 22–26 August 2007; pp. 3224–3227. [Google Scholar]
- Brajdic, A.; Harle, R. Walk detection and step counting on unconstrained smartphones. In Proceedings of the 2013 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Zurich, Switzerland, 8–12 September 2013; pp. 225–234. [Google Scholar]
- Mladenov, M.; Mock, M. A step counter service for java-enabled devices using a built-in accelerometer. In Proceedings of the 1st International Workshop on Context-Aware Middleware and Services: Affiliated with the 4th International Conference on Communication System Software and Middleware (COMSWARE 2009), Dublin, Ireland, 6–16 June 2009; pp. 1–5. [Google Scholar]
- Boutaayamou, M.; Schwartz, C.; Stamatakis, J.; Denoël, V.; Maquet, D.; Forthomme, B.; Croisier, J.-L.; Macq, B.; Verly, J.G.; Garraux, G.; et al. Development and validation of an accelerometer-based method for quantifying gait events. Med. Eng. Phys. 2015, 37, 226–232. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rebula, J.R.; Ojeda, L.V.; Adamczyk, P.G.; Kuo, A.D. Measurement of foot placement and its variability with inertial sensors. Gait Posture 2013, 38, 974–980. [Google Scholar] [CrossRef] [PubMed]
- Brandes, M.; Zijlstra, W.; Heikens, S.; van Lummel, R.; Rosenbaum, D. Accelerometry based assessment of gait parameters in children. Gait Posture 2006, 24, 482–486. [Google Scholar] [CrossRef] [PubMed]
- Afzal, M.R.; Oh, M.-K.; Lee, C.-H.; Park, Y.S.; Yoon, J. A portable gait asymmetry rehabilitation system for individuals with stroke using a vibrotactile feedback. BioMed Res. Int. 2015, 2015, 16. [Google Scholar] [CrossRef] [PubMed]
- Novak, D.; Reberšek, P.; De Rossi, S.M.M.; Donati, M.; Podobnik, J.; Beravs, T.; Lenzi, T.; Vitiello, N.; Carrozza, M.C.; Munih, M. Automated detection of gait initiation and termination using wearable sensors. Med. Eng. Phys. 2013, 35, 1713–1720. [Google Scholar] [CrossRef] [PubMed]
- Seel, T.; Raisch, J.; Schauer, T. Imu-based joint angle measurement for gait analysis. Sensors 2014, 14, 6891–6909. [Google Scholar] [CrossRef] [PubMed]
- Gouwanda, D.; Arosha Senanayake, S.M.N. Identifying gait asymmetry using gyroscopes—A cross-correlation and normalized symmetry index approach. J. Biomech. 2011, 44, 972–978. [Google Scholar] [CrossRef] [PubMed]
- Paranietharan, D.N. Who|Bangladesh. In WHO; World Health Organization: Geneva, Switzerland, 2017. [Google Scholar]
- Anwary, A.R.; Yu, H.; Vassallo, M. Optimal foot location for placing wearable IMU sensors and automatic feature extraction for gait analysis. IEEE Sens. J. 2017. [Google Scholar] [CrossRef]
- Cornacchia, M.; Ozcan, K.; Zheng, Y.; Velipasalar, S. A survey on activity detection and classification using wearable sensors. IEEE Sens. J. 2017, 17, 386–403. [Google Scholar] [CrossRef]
- MbientLab. Available online: https://mbientlab.com/ (accessed on 3 March 2016).
- Sazonov, E.S.; Fulk, G.; Hill, J.; Schutz, Y.; Browning, R. Monitoring of posture allocations and activities by a shoe-based wearable sensor. IEEE Trans. Biomed. Eng. 2011, 58, 983–990. [Google Scholar] [CrossRef] [PubMed]
- SolidWorks, I. Solidworks Corporation; Solidworks Corporation: Concord, MA, USA, 2002. [Google Scholar]
- Zhi, R. A Drift Eliminated Attitude & Position Estimation Algorithm in 3D. Master’s Thesis, University of Vermont, Burlington, VA, USA, 2016. [Google Scholar]
- MbientLab. Available online: https://mbientlab.Com/docs/metawearcpsv0.5.Pdf (accessed on 25 May 2015).
- Madgwick, S.O. An efficient orientation filter for inertial and inertial/magnetic sensor arrays. Citado 2010, 5, 9–19. [Google Scholar]
- Starlino, B. A Guide to Using IMU (Accelerometer and Gyroscope Devices) in Embedded Applications. Available online: http://www.starlino.com/imu_guide.html (accessed on 29 December 2017).
- Liu, D.-X.; Wu, X.; Du, W.; Wang, C.; Xu, T. Gait phase recognition for lower-limb exoskeleton with only joint angular sensors. Sensors 2016, 16, 1579. [Google Scholar] [CrossRef] [PubMed]
- Patterson, M.; Delahunt, E.; Sweeney, K.; Caulfield, B. An ambulatory method of identifying anterior cruciate ligament reconstructed gait patterns. Sensors 2014, 14, 887–899. [Google Scholar] [CrossRef] [PubMed]
- Foxlin, E. Pedestrian tracking with shoe-mounted inertial sensors. IEEE Comput. Graph. Appl. 2005, 25, 38–46. [Google Scholar] [CrossRef] [PubMed]
- Alvarez, D.; González, R.C.; López, A.; Alvarez, J.C. Comparison of step length estimators from weareable accelerometer devices. In Proceedings of the 28th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBS’06), New York, NY, USA, 30 August–3 September 2006; pp. 5964–5967. [Google Scholar]
- Lee, H.-H.; Choi, S.; Lee, M.-J. Step detection robust against the dynamics of smartphones. Sensors 2015, 15, 27230–27250. [Google Scholar] [CrossRef] [PubMed]
- Chon, Y.; Talipov, E.; Cha, H. Autonomous management of everyday places for a personalized location provider. IEEE Trans. Syst. Man Cybern. Part C 2012, 42, 518–531. [Google Scholar] [CrossRef]
- Gafurov, D.; Snekkenes, E. Towards understanding the uniqueness of gait biometric. In Proceedings of the 8th IEEE International Conference on Automatic Face & Gesture Recognition (FG’08), Amsterdam, The Netherlands, 17–19 September 2008; pp. 1–8. [Google Scholar]
- Truong, P.; Lee, J.; Kwon, A.-R.; Jeong, G.-M. Stride counting in human walking and walking distance estimation using insole sensors. Sensors 2016, 16, 823. [Google Scholar] [CrossRef] [PubMed]
- The MathWorks Inc. Find Local Maxima-Matlab Findpeaks, Mathworks United Kingdom. Available online: https://uk.mathworks.com/help/signal/ref/findpeaks.html (accessed on 14 December 2016).
- Oppenheim, A.V.; Schafer, R.W. Discrete-Time Signal Processing; Prentice Hall: Englewood Cliffs, NJ, USA, 1989. [Google Scholar]
- Hasan, A.M.; Samsudin, K.; Ramli, A.R.; Azmir, R.S.; Ismaeel, S.A. A review of navigation systems (integration and algorithms). Aust. J. Basic Appl. Sci. 2009, 3, 943–959. [Google Scholar]
- Lan, K.-C.; Shih, W.-Y. On calibrating the sensor errors of a PDR-based indoor localization system. Sensors 2013, 13, 4781–4810. [Google Scholar] [CrossRef] [PubMed]
- Sukumar, C.F.P.; Hazas, M. Tutorial: Implementation of a pedestrian tracker using foot-mounted inertial sensors. IEEE Pervasive Comput. 2012, 12, 17–27. [Google Scholar]
- Ilyas, M.; Cho, K.; Baeg, S.-H.; Park, S. Drift reduction in pedestrian navigation system by exploiting motion constraints and magnetic field. Sensors 2016, 16, 1455. [Google Scholar] [CrossRef] [PubMed]
- Fang, J.; Gu, Q.-T.; Ding, T.-H. Dynamic zero velocity update for vehicle inertial navigation system. J. Chin. Inert. Technol. 2008, 3, 004. [Google Scholar]
- Thong, Y.K.; Woolfson, M.S.; Crowe, J.A.; Hayes-Gill, B.R.; Jones, D.A. Numerical double integration of acceleration measurements in noise. Measurement 2004, 36, 73–92. [Google Scholar] [CrossRef]
- Kressig, R.W.; Beauchet, O. Guidelines for clinical applications of spatio-temporal gait analysis in older adults. Aging Clin. Exp. Res. 2006, 18, 174–176. [Google Scholar] [CrossRef] [PubMed]
- Whittle, M. Gait Analysis: An Introduction; Butterworth Heinmann: Oxford, UK, 2002. [Google Scholar]
- Thingstad, P.; Egerton, T.; Ihlen, E.F.; Taraldsen, K.; Moe-Nilssen, R.; Helbostad, J.L. Identification of gait domains and key gait variables following hip fracture. BMC Geriatr. 2015, 15, 150. [Google Scholar] [CrossRef] [PubMed]
- Hausdorff, J.M.; Cudkowicz, M.E.; Firtion, R.; Wei, J.Y.; Goldberger, A.L. Gait variability and basal ganglia disorders: Stride-to-stride variations of gait cycle timing in Parkinson’s disease and Huntington’s disease. Mov. Disord. 1998, 13, 428–437. [Google Scholar] [CrossRef] [PubMed]
- Zeni, J.A.; Higginson, J.S. Gait parameters and stride-to-stride variability during familiarization to walking on a split-belt treadmill. Clin. Biomech. 2010, 25, 383–386. [Google Scholar] [CrossRef] [PubMed]
- Beauchet, O.; Allali, G.; Launay, C.; Herrmann, F.; Annweiler, C. Gait variability at fast-pace walking speed: A biomarker of mild cognitive impairment? J. Nutr., Health Aging 2013, 17, 235–239. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- IJmker, T.; Lamoth, C.J. Gait and cognition: The relationship between gait stability and variability with executive function in persons with and without dementia. Gait Posture 2012, 35, 126–130. [Google Scholar] [CrossRef] [PubMed]
- Balasubramanian, C.K.; Neptune, R.R.; Kautz, S.A. Variability in spatiotemporal step characteristics and its relationship to walking performance post-stroke. Gait Posture 2009, 29, 408–414. [Google Scholar] [CrossRef] [PubMed]
- Sadeghi, H.; Allard, P.; Prince, F.; Labelle, H. Symmetry and limb dominance in able-bodied gait: A review. Gait Posture 2000, 12, 34–45. [Google Scholar] [CrossRef]
- Knutson, G.A. Anatomic and functional leg-length inequality: A review and recommendation for clinical decision-making. Part I, anatomic leg-length inequality: Prevalence, magnitude, effects and clinical significance. Chiropr. Osteopat. 2005, 13, 11. [Google Scholar] [CrossRef] [PubMed]
- Schauer, M.; Mauritz, K.-H. Musical motor feedback (MMF) in walking hemiparetic stroke patients: Randomized trials of gait improvement. Clin. Rehabilit. 2003, 17, 713–722. [Google Scholar] [CrossRef] [PubMed]
- Chou, S.-W.; Wong, A.M.; Leong, C.-P.; Hong, W.-S.; Tang, F.-T.; Lin, T.-H. Postural control during sit-to stand and gait in stroke patients. Am. J. Phys. Med. Rehabilit. 2003, 82, 42–47. [Google Scholar] [CrossRef]
- Lin, P.-Y.; Yang, Y.-R.; Cheng, S.-J.; Wang, R.-Y. The relation between ankle impairments and gait velocity and symmetry in people with stroke. Arch. Phys. Med. Rehabilit. 2006, 87, 562–568. [Google Scholar] [CrossRef] [PubMed]
- Robinson, R.; Herzog, W.; Nigg, B. Use of force platform variables to quantify the effects of chiropractic manipulation on gait symmetry. J. Manip. Physiol. Ther. 1987, 10, 172–176. [Google Scholar]
- Plotnik, M.; Giladi, N.; Hausdorff, J.M. A new measure for quantifying the bilateral coordination of human gait: Effects of aging and Parkinson’s disease. Exp. Brain Res. 2007, 181, 561–570. [Google Scholar] [CrossRef] [PubMed]
- Zifchock, R.A.; Davis, I.; Higginson, J.; Royer, T. The symmetry angle: A novel, robust method of quantifying asymmetry. Gait Posture 2008, 27, 622–627. [Google Scholar] [CrossRef] [PubMed]
- Archer, K.R.; Castillo, R.C.; MacKenzie, E.J.; Bosse, M.J. Gait symmetry and walking speed analysis following lower-extremity trauma. Phys. Ther. 2006, 86, 1630. [Google Scholar] [CrossRef] [PubMed]
- Herzog, W.; Nigg, B.M.; Read, L.J.; Olsson, E. Asymmetries in ground reaction force patterns in normal human gait. Med. Sci. Sports Exerc. 1989, 21, 110–114. [Google Scholar] [CrossRef] [PubMed]
- Leddy, A.L.; Crowner, B.E.; Earhart, G.M. Functional gait assessment and balance evaluation system test: Reliability, validity, sensitivity, and specificity for identifying individuals with Parkinson disease who fall. Phys. Ther. 2011, 91, 102. [Google Scholar] [CrossRef] [PubMed]
- Shapiro, S.S.; Wilk, M.B. An analysis of variance test for normality (complete samples). Biometrika 1965, 52, 591–611. [Google Scholar] [CrossRef]
- Woolson, R.F. Wilcoxon signed-rank test. In Wiley Encyclopedia of Clinical Trials; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2007. [Google Scholar]
- Corp, I. IBM Spss Statistics for Windows, 24; IBM Corp: Armonk, NY, USA, 2013. [Google Scholar]
- Mohler, B.J.; Thompson, W.B.; Creem-Regehr, S.H.; Pick, H.L.; Warren, W.H. Visual flow influences gait transition speed and preferred walking speed. Exp. Brain Res. 2007, 181, 221–228. [Google Scholar] [CrossRef] [PubMed]
- Qualisys Motion Capture. Available online: https://www.Qualisys.Com/ (accessed on 4 August 2017).
- Warren, S.F.; Wall, J.H.; Bevly, D.M. Characterization of Various Imu Error Sources and the Effect on Navigation Performance. In Proceedings of the 18th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2005), Long Beach Convention Center, Long Beach, CA, USA, 13–16 September 2005. [Google Scholar]
- Yang, S.; Laudanski, A.; Li, Q. Inertial sensors in estimating walking speed and inclination: An evaluation of sensor error models. Med. Biol. Eng. Comput. 2012, 50, 383–393. [Google Scholar] [CrossRef] [PubMed]
- Welch, G.; Foxlin, E. Motion tracking: No silver bullet, but a respectable arsenal. IEEE Comput. Graph. Appl. 2002, 22, 24–38. [Google Scholar] [CrossRef]
- Weisstein, E.W. Newton-cotes formulas. MathWorld. Available online: http://mathworld.wolfram.com/Newton-CotesFormulas.html 2004 (accessed on 8 April 2017).
- Brach, J.S.; VanSwearingen, J.M. Interventions to improve walking in older adults. Curr. Transl. Geriatr. Exp. Gerontol. Rep. 2013, 2. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Older subject 1 | Age | Height (m) | Weight (Kg) | Gender | |
|---|---|---|---|---|---|
| 67 | 1.57 | 68 | Male | ||
| Total Time (s) | 99.3 | ||||
| Actual * | Right Leg ** | Accuracy (%) | Left Leg ** | Accuracy (%) | |
| Total Distance (m) | 21.03 | 20.59 | 97.91 | 20.47 | 97.34 |
| Estimated Velocity (m/s) | 0.21 | 0.21 | 97.91 | 0.21 | 97.34 |
| Detected Stride Number | 30 | 30 | 100 | 30 | 100 |
| Detected Step Number | 30 | 30 | 100 | 30 | 100 |
| Right Leg | Left Leg | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Gait Features | Mean | Std | Var | Min | Max | Mean | Std | Var | Min | Max |
| Stride Length (m) | 0.69 | 0.07 | 0.00 | 0.56 | 0.84 | 0.69 | 0.09 | 0.01 | 0.49 | 1.05 |
| Stride Time (s) | 2.80 | 0.28 | 0.08 | 2.30 | 3.40 | 2.85 | 0.37 | 0.13 | 2.05 | 4.30 |
| Stride Velocity (m/s) | 0.25 | 0.24 | ||||||||
| Step length (m) | 0.27 | 0.06 | 0.00 | 0.14 | 0.46 | 0.32 | 0.05 | 0.00 | 0.23 | 0.46 |
| Step time(s) | 1.28 | 0.30 | 0.09 | 0.65 | 2.15 | 1.52 | 0.26 | 0.07 | 1.10 | 2.15 |
| Step Velocity (m/s) | 0.25 | 0.24 | ||||||||
| Cadence (step/min) | 18.13 | 18.13 | ||||||||
| Step Ratio (Step length/cadence) | 0.02 | 0.02 | ||||||||
| Stance Time (s) | 1.65 | 0.23 | 0.05 | 1.67 | 0.35 | 0.12 | ||||
| Swing Length (m) | 0.69 | 0.35 | 0.12 | 0.69 | 0.44 | 0.19 | ||||
| Swing Time (s) | 1.16 | 0.23 | 0.05 | 1.18 | 0.21 | 0.04 | ||||
| Swing Velocity (m/s) | 0.59 | 0.58 | ||||||||
| Participants | Leg | Qualisys | Estimated | Qualisys | Period | ||
|---|---|---|---|---|---|---|---|
| Distance (m) | Accuracy (%) | Time (s) | Accuracy (%) | ||||
| 1 | Right | 7.650 | 7.607 | 99.435 | 12.670 | 12.510 | 98.740 |
| Left | 7.522 | 7.459 | 99.159 | 12.330 | 12.330 | 100.000 | |
| 2 | Right | 7.402 | 7.155 | 96.664 | 12.670 | 12.830 | 98.740 |
| Left | 7.456 | 7.327 | 98.270 | 12.330 | 12.280 | 99.590 | |
| 3 | Right | 8.181 | 8.126 | 99.330 | 8.720 | 8.740 | 99.770 |
| Left | 7.984 | 7.747 | 97.034 | 8.280 | 8.150 | 98.430 | |
| 4 | Right | 7.978 | 7.806 | 97.848 | 8.720 | 8.880 | 98.170 |
| Left | 8.121 | 8.061 | 99.259 | 8.280 | 8.180 | 98.790 | |
| 5 | Right | 7.735 | 7.699 | 99.531 | 9.780 | 9.750 | 99.690 |
| Left | 7.842 | 7.791 | 99.345 | 9.720 | 9.640 | 99.180 | |
| 6 | Right | 7.564 | 7.493 | 99.066 | 9.780 | 9.710 | 99.280 |
| Left | 7.481 | 7.518 | 99.505 | 9.720 | 9.830 | 98.870 | |
| 7 | Right | 7.693 | 6.784 | 88.181 | 7.380 | 7.250 | 98.240 |
| Left | 7.626 | 7.197 | 94.377 | 7.030 | 7.130 | 98.580 | |
| 8 | Right | 7.422 | 6.939 | 93.497 | 7.380 | 7.310 | 99.050 |
| Left | 7.144 | 6.669 | 93.344 | 7.030 | 7.140 | 98.440 | |
| 9 | Right | 7.769 | 7.744 | 99.678 | 7.940 | 7.910 | 99.620 |
| Left | 7.755 | 7.626 | 98.331 | 7.870 | 8.000 | 98.350 | |
| 10 | Right | 7.508 | 7.485 | 99.698 | 7.940 | 7.960 | 99.750 |
| Left | 7.623 | 7.613 | 99.870 | 7.870 | 7.800 | 99.110 | |
| AVERAGE | Age | Height (m) | Weight (Kg) | Gender | |
|---|---|---|---|---|---|
| 25.30 | 1.61 | 61.90 | 9 M, 1 F | ||
| Total Time (s) | 51.85 | ||||
| Actual * | Right Leg ** | Accuracy | Left Leg ** | Accuracy | |
| Total Distance (m) | 37.77 | 37.19 | 97.73 | 37.81 | 98.82 |
| Estimated Velocity (m/s) | 0.73 | 0.72 | 97.73 | 0.73 | 98.82 |
| Detected Stride Number | 30.00 | 30.00 | 100.00 | 30.00 | 100.00 |
| Detected Step Number | 30.00 | 30.00 | 100.00 | 30.00 | 100.00 |
| Right | Left | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Gait Features | Mean | Std | Var | Min | Max | Mean | Std | Var | Min | Max |
| Stride Length (m) | 1.17 | 0.17 | 0.03 | 0.91 | 1.65 | 1.17 | 0.17 | 0.03 | 0.89 | 1.61 |
| Stride Time (s) | 1.41 | 0.20 | 0.04 | 1.10 | 1.97 | 1.39 | 0.19 | 0.04 | 1.07 | 1.91 |
| Stride Velocity (m/s) | 0.83 | 0.83 | 0.83 | 0.84 | 0.84 | 0.84 | ||||
| Cadence (step/min) | 34.93 | 34.93 | ||||||||
| Step Velocity (m/s) | 0.83 | 0.85 | 0.75 | 0.84 | 0.86 | 0.77 | ||||
| Step length (m) | 0.50 | 0.14 | 0.02 | 0.15 | 0.84 | 0.54 | 0.18 | 0.04 | 0.24 | 1.10 |
| Step time(s) | 0.68 | 0.19 | 0.04 | 0.21 | 1.14 | 0.74 | 0.24 | 0.07 | 0.33 | 1.48 |
| Step Ratio (Step length/cadence) | 0.01 | 0.01 | ||||||||
| Stance Time (s) | 0.84 | 0.16 | 0.03 | 0.83 | 0.13 | 0.02 | ||||
| Swing Length (m) | 1.17 | 0.68 | 0.49 | 1.17 | 0.94 | 1.14 | ||||
| Swing Time (s) | 0.58 | 0.12 | 0.02 | 0.57 | 0.15 | 0.02 | ||||
| Swing Velocity (m/s) | 2.07 | 1.80 | 1.80 | 2.10 | 1.83 | 1.83 | ||||
| Average | Age | Height (m) | Weight (Kg) | Gender | |
|---|---|---|---|---|---|
| 69.40 | 1.52 | 63.40 | 9 M, 1F | ||
| Total Time (s) | 80.26 | ||||
| Actual * | Right Leg ** | Accuracy | Left Leg ** | Accuracy | |
| Total Distance (m) | 22.49 | 22.21 | 88.71 | 21.19 | 89.88 |
| Estimated Velocity (m/s) | 0.31 | 0.29 | 88.71 | 0.27 | 89.88 |
| Detected Stride Number | 30 | 27.80 | 92.67 | 27.80 | 92.67 |
| Detected Step Number | 30 | 27.80 | 92.67 | 27.80 | 92.67 |
| Right | Left | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Gait Features | Mean | Std | Var | Min | Max | Mean | Std | Var | Min | Max |
| Stride Length (m) | 0.74 | 0.14 | 0.02 | 0.54 | 1.16 | 0.74 | 0.13 | 0.02 | 0.55 | 1.09 |
| Stride Time (s) | 2.47 | 0.46 | 0.24 | 1.84 | 3.88 | 2.44 | 0.39 | 0.16 | 1.80 | 3.47 |
| Stride Velocity (m/s) | 0.32 | 0.32 | 0.32 | 0.33 | 0.32 | 0.32 | ||||
| Cadence (step/min) | 24.34 | 24.34 | ||||||||
| Step Velocity (m/s) | 0.32 | 0.33 | 0.13 | 0.33 | 0.33 | 0.13 | ||||
| Step length (m) | 0.22 | 0.23 | 0.06 | 0.22 | 0.63 | 0.35 | 0.18 | 0.04 | 0.04 | 0.57 |
| Step time(s) | 0.54 | 0.86 | 1.02 | 1.02 | 2.07 | 1.13 | 0.73 | 0.81 | 0.18 | 2.20 |
| Step Ratio (Step length/cadence) | 0.007 | 0.014 | ||||||||
| Stance Time (s) | 1.39 | 0.30 | 0.10 | 1.37 | 0.28 | 0.08 | ||||
| Swing Length (m) | 0.74 | 0.78 | 0.73 | 0.74 | 0.76 | 0.66 | ||||
| Swing Time (s) | 1.09 | 0.30 | 0.10 | 1.07 | 0.23 | 0.05 | ||||
| Swing Velocity (m/s) | 0.78 | 0.68 | 0.68 | 0.78 | 0.65 | 0.65 | ||||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Anwary, A.R.; Yu, H.; Vassallo, M. An Automatic Gait Feature Extraction Method for Identifying Gait Asymmetry Using Wearable Sensors. Sensors 2018, 18, 676. https://doi.org/10.3390/s18020676
Anwary AR, Yu H, Vassallo M. An Automatic Gait Feature Extraction Method for Identifying Gait Asymmetry Using Wearable Sensors. Sensors. 2018; 18(2):676. https://doi.org/10.3390/s18020676
Chicago/Turabian StyleAnwary, Arif Reza, Hongnian Yu, and Michael Vassallo. 2018. "An Automatic Gait Feature Extraction Method for Identifying Gait Asymmetry Using Wearable Sensors" Sensors 18, no. 2: 676. https://doi.org/10.3390/s18020676
APA StyleAnwary, A. R., Yu, H., & Vassallo, M. (2018). An Automatic Gait Feature Extraction Method for Identifying Gait Asymmetry Using Wearable Sensors. Sensors, 18(2), 676. https://doi.org/10.3390/s18020676