Touch Locating and Stretch Sensing Studies of Conductive Hydrogels with Applications to Soft Robots


Abstract
:1. Introduction
2. Materials and Methods
2.1. CHs Fabrication
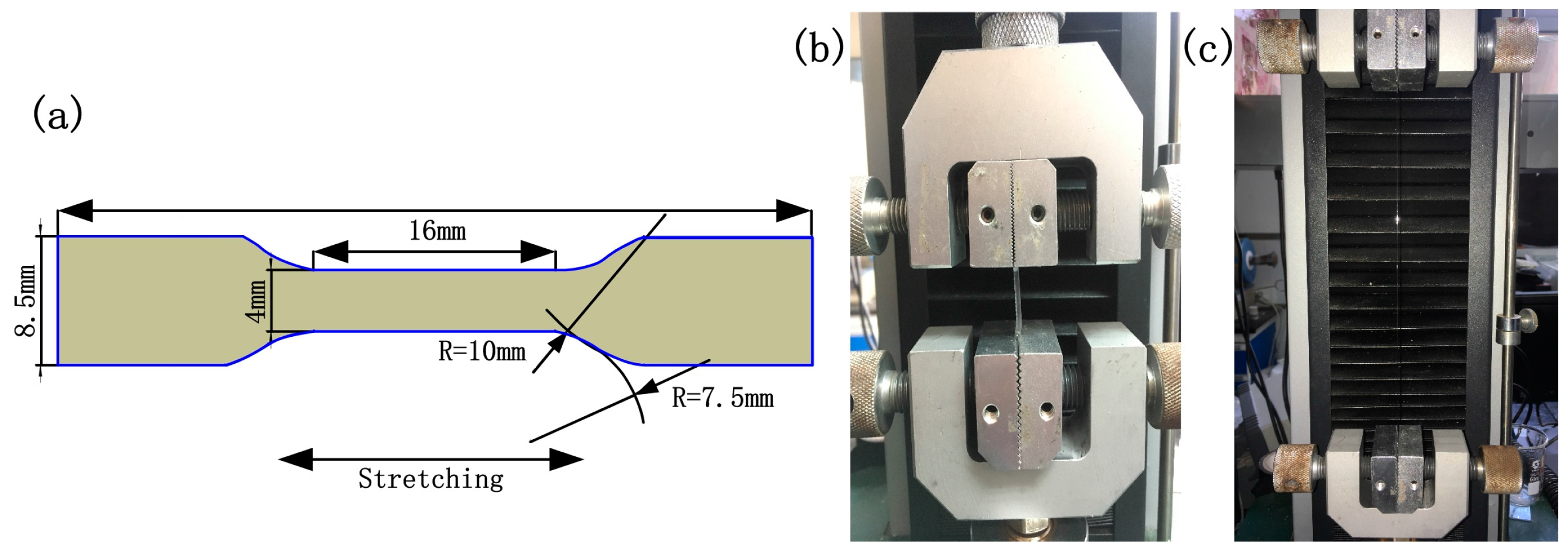
2.2. Mechanical Stretching Setup
2.3. Measuring Setup
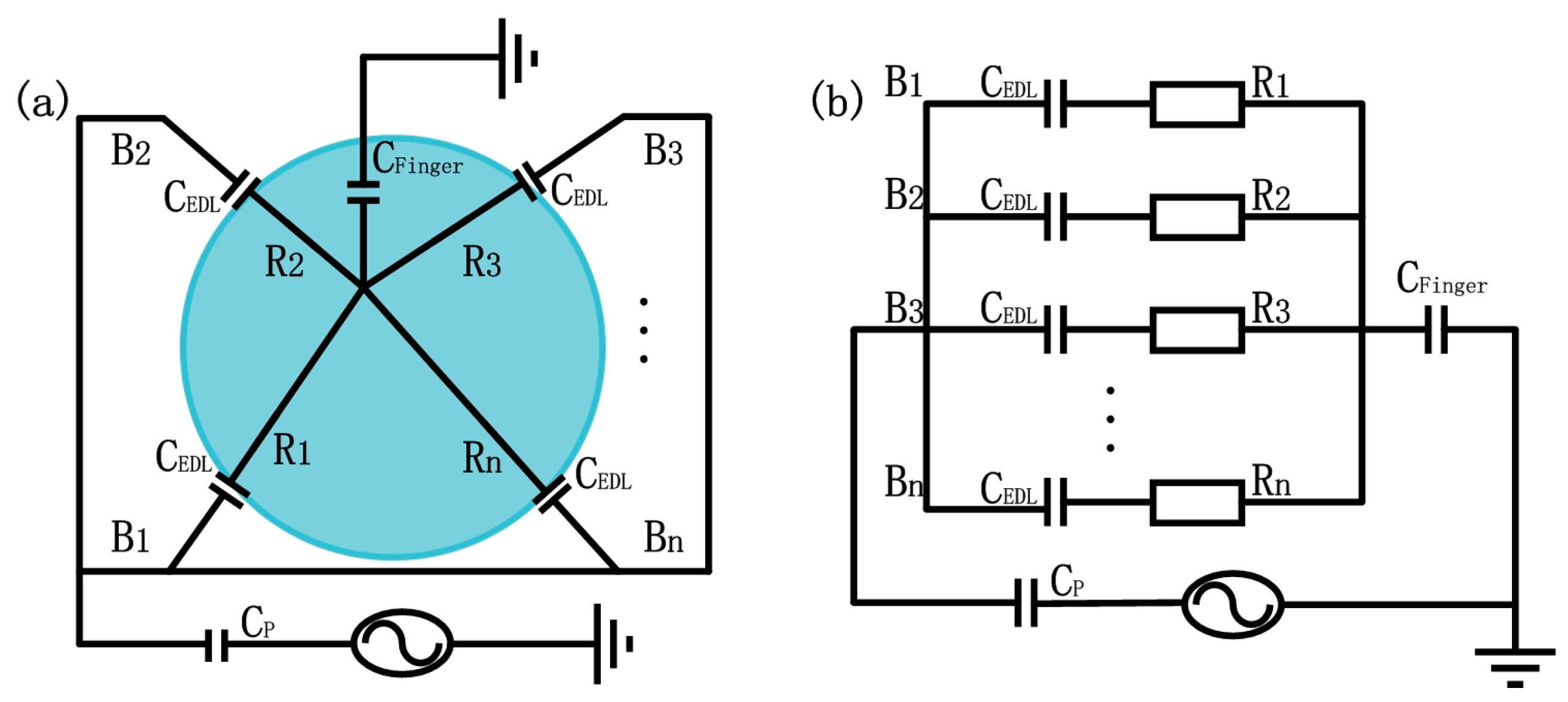
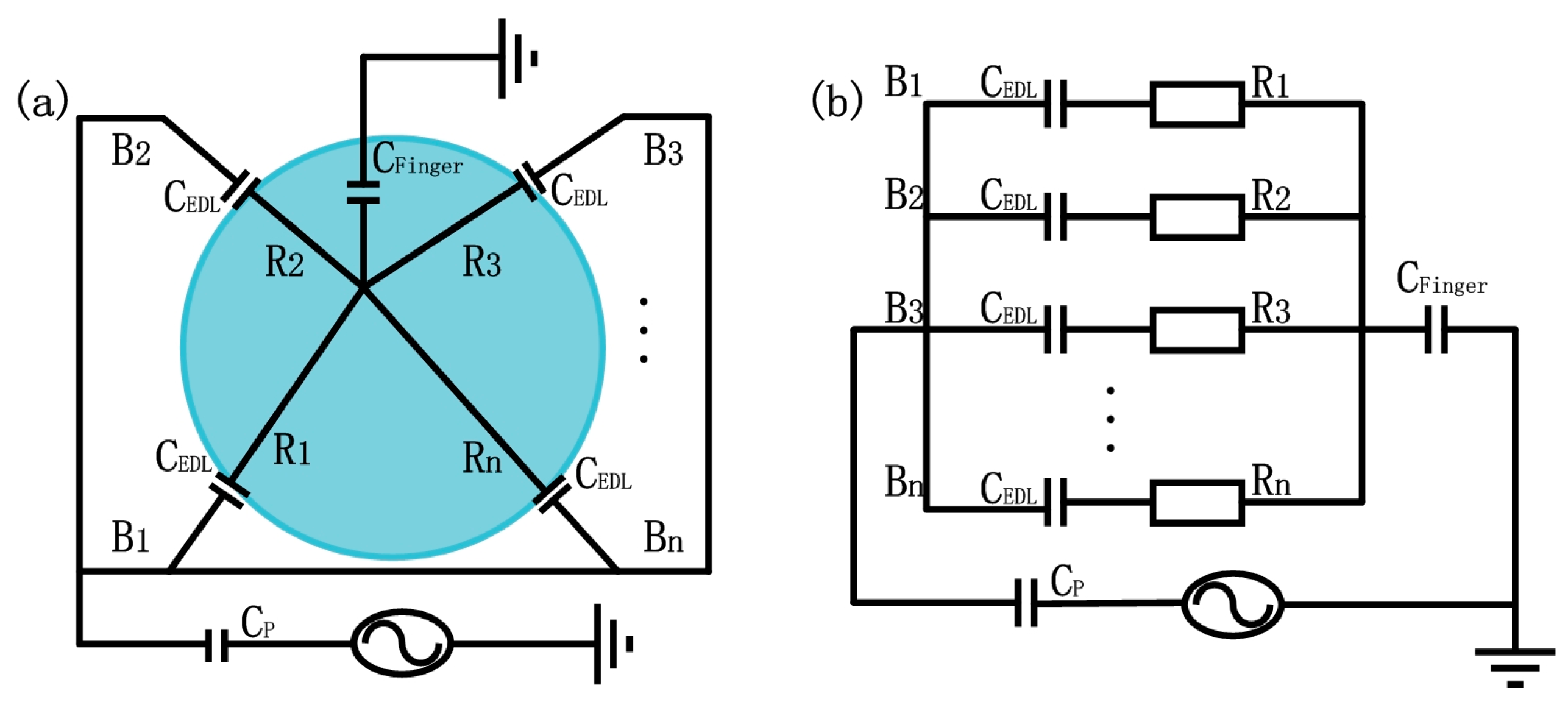
2.4. Sensing Mechanisms
2.5. Finite Element Method Simulations
3. Results
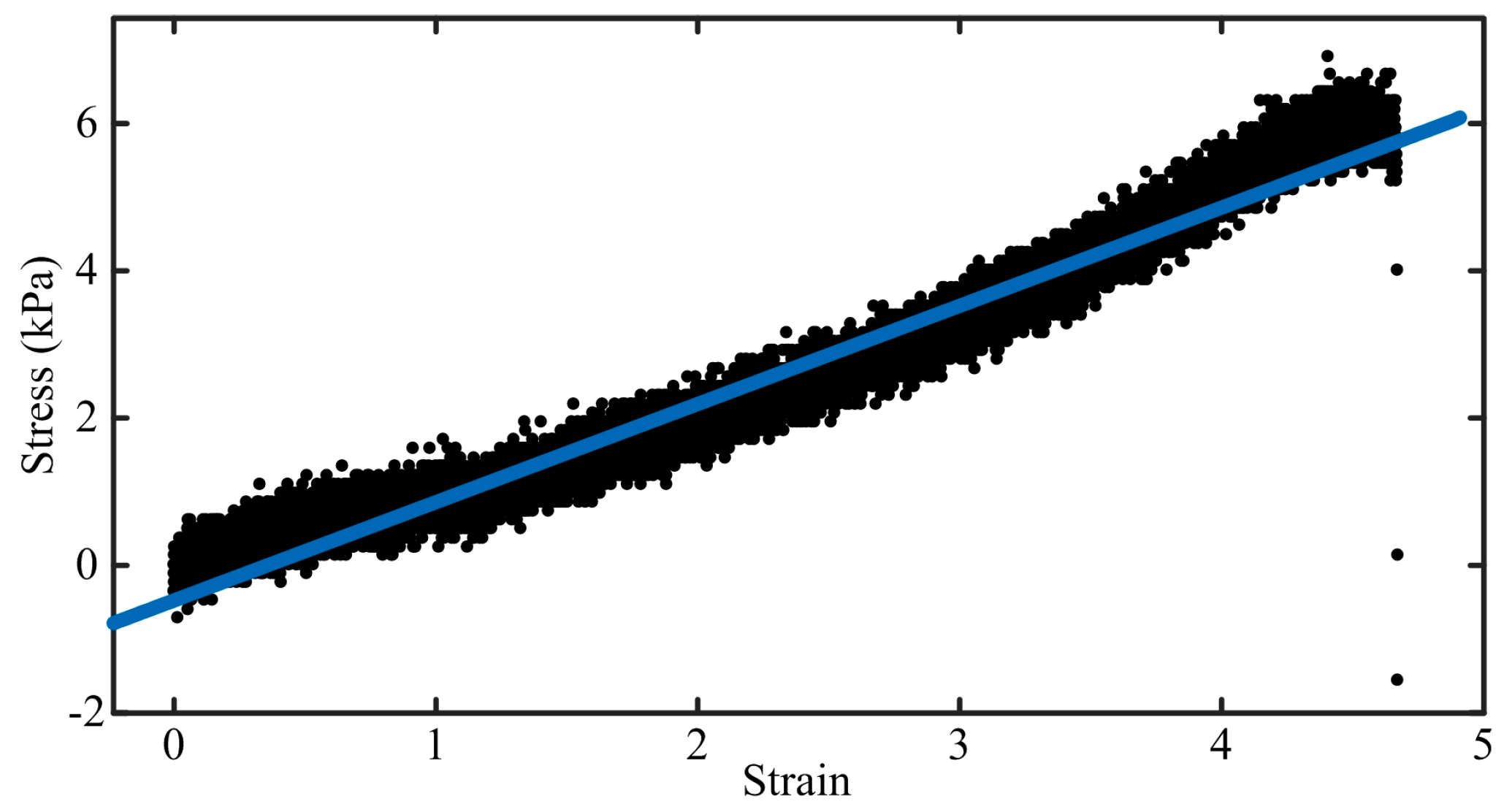
3.1. Mechanical Properties
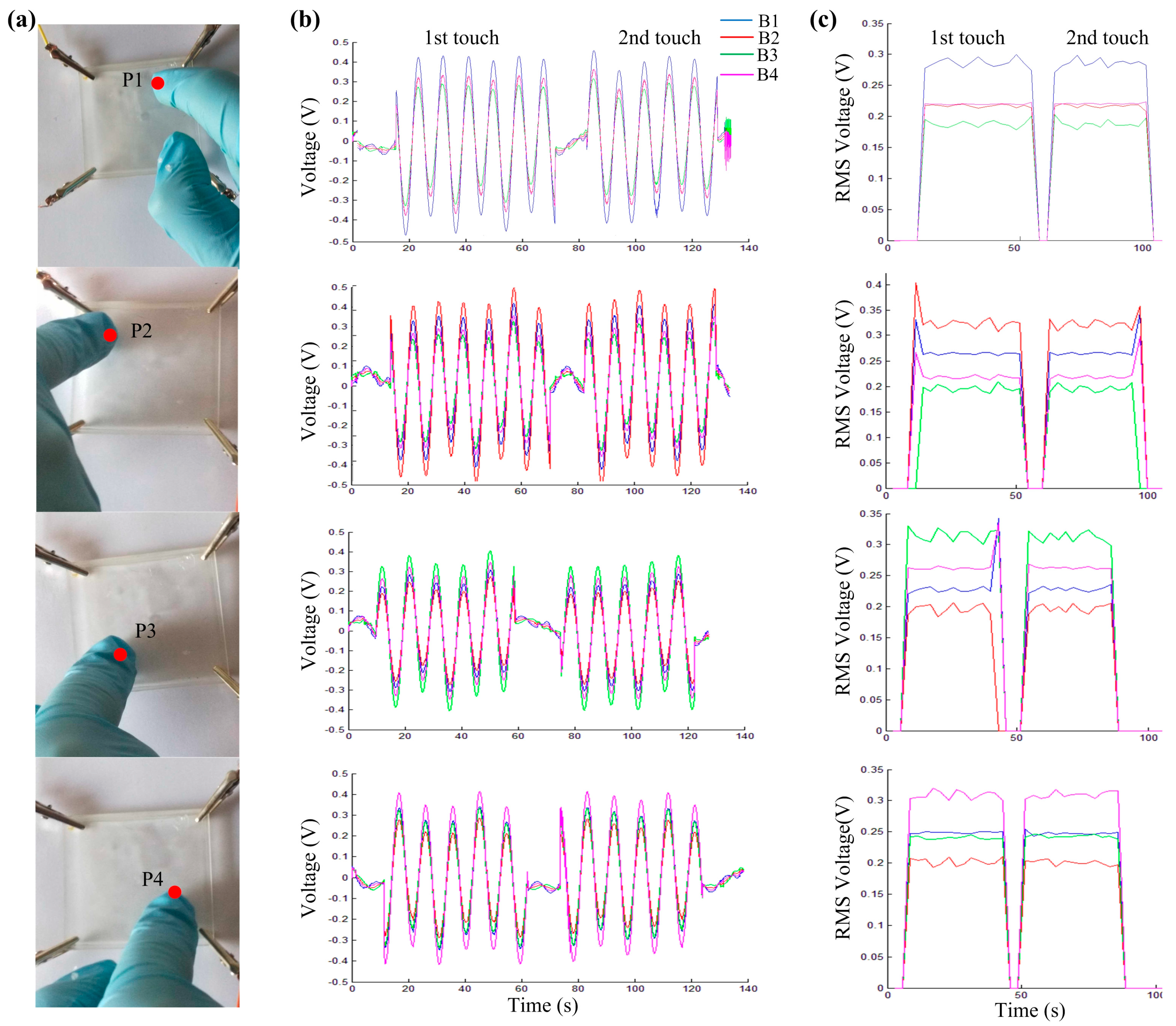
3.2. Touch Sensing of the Panel
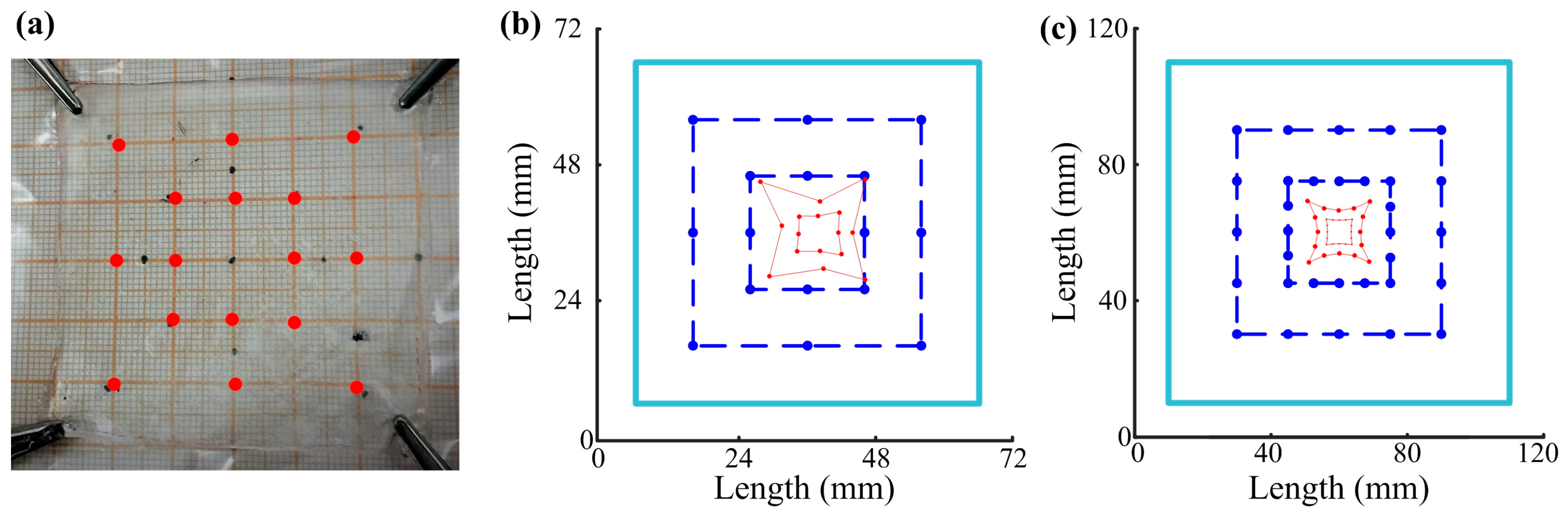
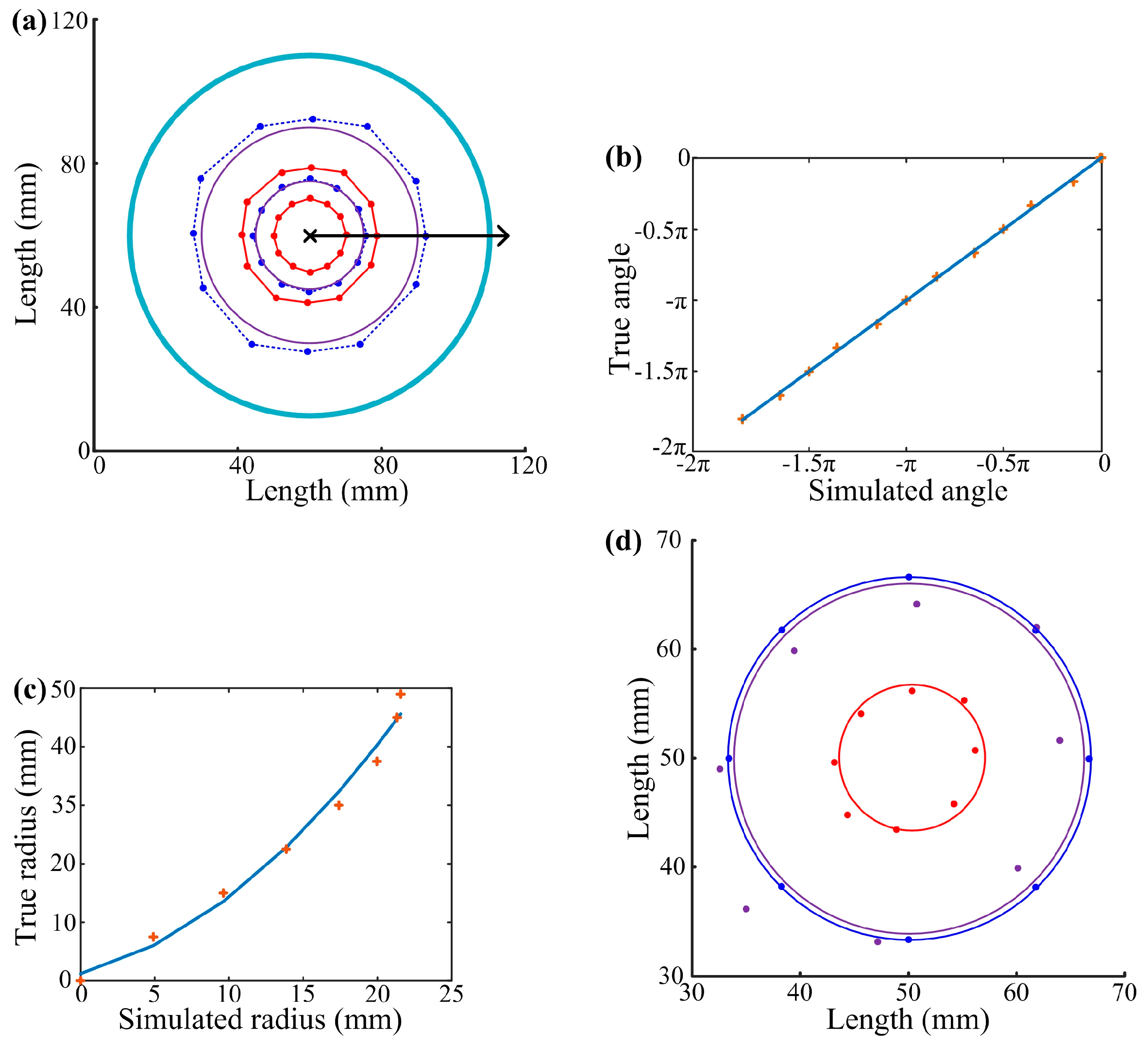
3.3. Touch Locating of the Panel
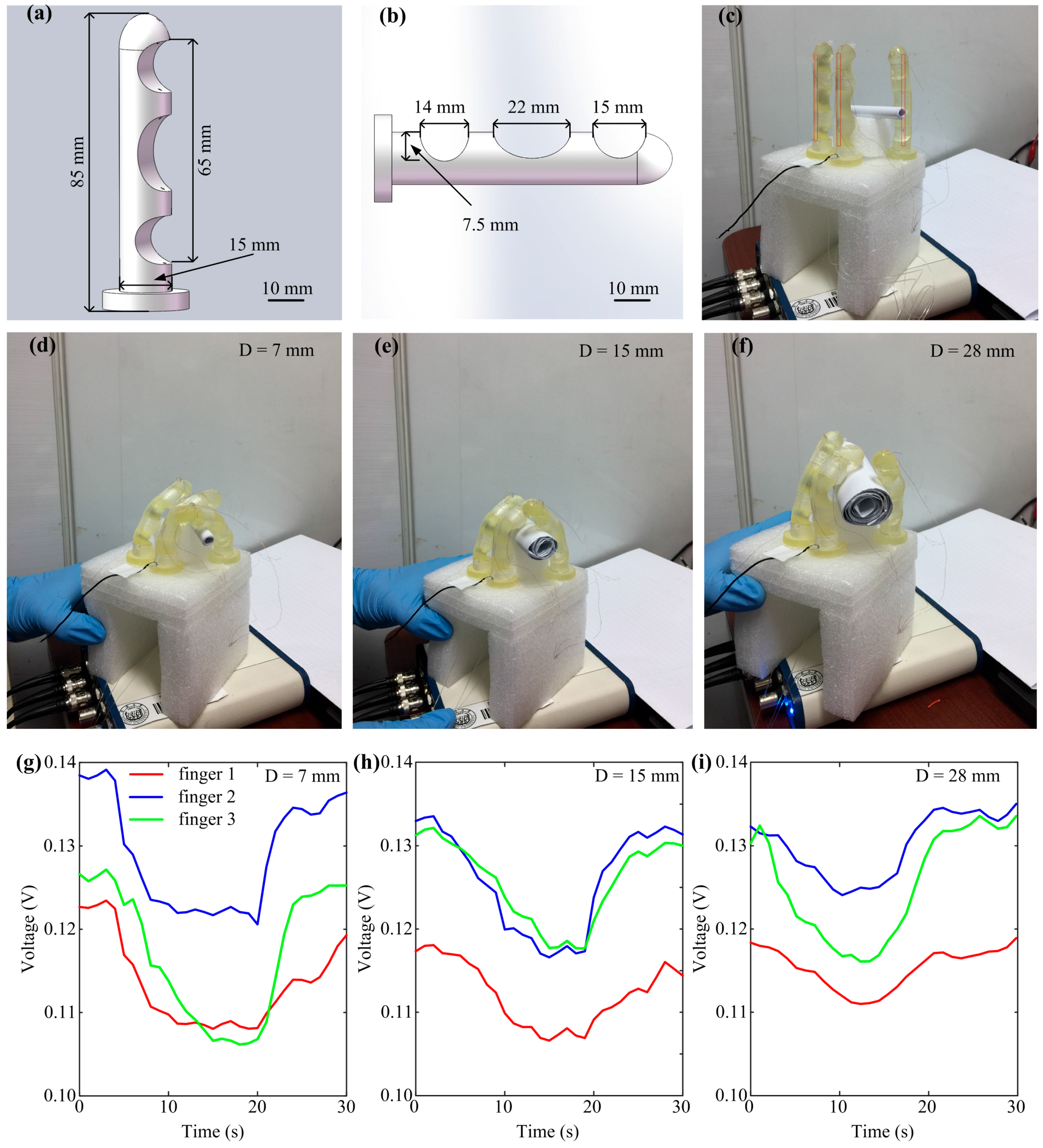
3.4. Stretch Sensing
4. Discussion
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef] [PubMed]
- Deepak, T.; Christopher, D.R.; William, M.K.; Ian, D.W. Soft robotics: Biological inspiration, state of the art, and future research. Appl. Bionics. Biomech. 2008, 5, 99–117. [Google Scholar]
- Kim, S.; Laschi, C.; Trimmer, B. Soft robotics: A bioinspired evolution in robotics. Trends Biotechnol. 2013, 31, 287–294. [Google Scholar] [CrossRef] [PubMed]
- He, B.; Wang, Z.; Li, M.; Wang, K.; Shen, R.; Hu, S. Wet Adhesion Inspired Bionic Climbing Robot. IEEE/ASME Trans. Mechatron. 2014, 19, 312–320. [Google Scholar] [CrossRef]
- Trimmer, B. Soft robots. Curr. Biol. 2013, 23, R639–R641. [Google Scholar] [CrossRef] [PubMed]
- Alcaraz-Jimenez, J.J.; Herrero-Perez, D.; Martinez-Barbera, H. Robust feedback control of ZMP-based gait for the humanoid robot Nao. Int. J. Robot. Res. 2013, 32, 1074–1088. [Google Scholar] [CrossRef]
- Calisti, M.; Giorelli, M.; Levy, G.; Mazzolai, B.; Hochner, B.; Laschi, C.; Dario, P. An octopus-bioinspired solution to movement and manipulation for soft robots. Bioinspir. Biomim. 2011, 6, 036002. [Google Scholar] [CrossRef] [PubMed]
- Sun, Y.; Song, S.; Liang, X. A Miniature Soft Robotic Manipulator Based on Novel Fabrication Methods. IEEE Robot. Autom. Mag. 2016, 1, 617–623. [Google Scholar] [CrossRef]
- Saifeldeen, M.A.; Fouad, N.; Huang, H.; Wu, Z.S. Stabilization of electrical sensing properties of carbon fiber sensors using pre-tensioning approach. Smart Mater. Struct. 2017, 26, 015012. [Google Scholar] [CrossRef]
- Majidi, C.; Kramer, R.; Wood, R.J. A non-differential elastomer curvature sensor for softer-than-skin electronics. Smart Mater. Struct. 2011, 20, 105017. [Google Scholar] [CrossRef]
- Kramer, R.K.; Majidi, C.; Wood, R.J. Masked Deposition of Gallium-Indium Alloys for Liquid-Embedded Elastomer Conductors. Adv. Funct. Mater. 2013, 23, 5292–5296. [Google Scholar] [CrossRef]
- Muth, J.T.; Vogt, D.M.; Truby, R.L.; Menguc, Y.; Kolesky, D.B.; Wood, R.J.; Lewis, J.A. Embedded 3D Printing of Strain Sensors within Highly Stretchable Elastomers. Adv. Mater. 2014, 26, 6307–6312. [Google Scholar] [CrossRef] [PubMed]
- Khondoker, M.A.H.; Sameoto, D. Fabrication methods and applications of microstructured gallium based liquid metal alloys. Smart Mater. Struct. 2016, 25, 093001. [Google Scholar] [CrossRef]
- Park, Y.L.; Chen, B.R.; Wood, R.J. Design and fabrication of soft artificial skin using embedded microchannels and liquid conductors. IEEE Sens. J. 2012, 12, 2711–2718. [Google Scholar] [CrossRef]
- Park, W.; Ro, K.; Kim, S.; Bae, J. A Soft Sensor-Based Three-Dimensional (3-D) Finger Motion Measurement System. Sensors 2017, 17, 420. [Google Scholar] [CrossRef] [PubMed]
- Umedachi, T.; Vikas, V.; Trimmer, B.A. Softworms: The design and control of non-pneumatic, 3D-printed, deformable robots. Bioinspir. Biomim. 2016, 11, 025001. [Google Scholar] [CrossRef] [PubMed]
- Mutlu, R.; Alici, G.; Panhuis, M.I.H.; Spinks, G.M. 3D Printed Flexure Hinges for Soft Monolithic Prosthetic Fingers. Soft Robot. 2016, 3, 120–133. [Google Scholar] [CrossRef]
- Hong, H.C.; Chen, C.M. Design, Fabrication and Failure Analysis of Stretchable Electrical Routings. Sensors 2014, 14, 11855–11877. [Google Scholar]
- Qiu, Y.; Park, K. Environment-sensitive hydrogels for drug delivery. Adv. Drug Del. Rev. 2012, 64, 49–60. [Google Scholar] [CrossRef]
- Darnell, M.C.; Sun, J.-Y.; Mehta, M.; Johnson, C.; Arany, P.R.; Suo, Z.; Mooney, D.J. Performance and biocompatibility of extremely tough alginate/polyacrylamide hydrogels. Biomaterials 2013, 34, 8042–8048. [Google Scholar] [CrossRef] [PubMed]
- Kiyohaya, O.; Masayuki, I.; Toshiaki, I.; Masanori, F.; Yuichi, O.; Tadaaki, M.; Yoshio, S.; Hirofumi, Y.; Takemi, M.; Hidemi, H.; et al. Photocrosslinkable chitosan hydrogel containing fibroblast growth factor-2 stimulates wound healing in healing-impaired db/db mice. Biomaterials 2003, 24, 3437–3444. [Google Scholar]
- Mawad, D.; Stewart, E.; Officer, D.L.; Romeo, T.; Wagner, P.; Wagner, K.; Wallace, G.G. A Single Component Conducting Polymer Hydrogel as a Scaffold for Tissue Engineering. Adv. Funct. Mater. 2012, 22, 2692–2699. [Google Scholar] [CrossRef]
- Masarapu, C.; Wang, L.P.; Li, X.; Wei, B.Q. Tailoring Electrode/Electrolyte Interfacial Properties in Flexible Supercapacitors by Applying Pressure. Adv. Energy Mater. 2012, 2, 546–552. [Google Scholar] [CrossRef]
- Keplinger, C.; Sun, J.Y.; Foo, C.C.; Rothemund, P.; Whitesides, G.M.; Suo, Z.G. Stretchable, Transparent, Ionic Conductors. Science 2013, 341, 984–987. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sun, J.Y.; Keplinger, C.; Whitesides, G.M.; Suo, Z.G. Ionic Skin. Adv. Mater. 2014, 26, 7608–7614. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Larson, C.; Peele, B.; Li, S.; Robinson, S.; Totaro, M.; Beccai, L.; Mazzolai, B.; Shepherd, R. Highly stretchable electroluminescent skin for optical signaling and tactile sensing. Science 2016, 351, 1071–1074. [Google Scholar] [CrossRef] [PubMed]
- Kim, C.C.; Lee, H.H.; Oh, K.H.; Sun, J.Y. Highly stretchable, transparent ionic touch panel. Science 2016, 353, 682–687. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.H.; Wu, D.B.; Wang, H.L.; Wang, Q.G. Self-Recovering Tough Gel Electrolyte with Adjustable Supercapacitor Performance. Adv. Mater. 2014, 26, 4370–4375. [Google Scholar] [CrossRef] [PubMed]
- Tian, K.; Bae, J.; Bakarich, S.E.; Yang, C.; Gately, R.D.; Spinks, G.M.; Marc, P.; Suo, Z.; Vlassak, J.J. 3D Printing of Transparent and Conductive Heterogeneous Hydrogel–Elastomer Systems. Adv. Mater. 2017, 29, 1604827–1604834. [Google Scholar] [CrossRef] [PubMed]
- Wu, Q.; Wei, J.; Wu, B.; Liu, X.; Wang, H.; Wang, W.; Wang, Q.; Liu, W. A robust, highly stretchable supramolecular polymer conductive hydrogel with self-healability and thermo-processability. Sci. Rep. 2017, 7, 41566. [Google Scholar] [CrossRef] [PubMed]
- Gao, Y.; Song, J.F.; Li, S.M.; Elowsky, C.; Zhou, Y.; Ducharme, S.; Chen, Y.M.; Zhou, Q.; Tan, L. Hydrogel microphones for stealthy underwater listening. Nat. Commun. 2016, 7, 12316. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.H.; He, B.; Wang, Z.P.; Tang, H.F.; Su, T.; Wang, Q.G. Tough Nanocomposite Ionogel-based Actuator Exhibits Robust Performance. Sci. Rep. 2014, 4, 6673. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; He, B.; Wang, Q.; Yin, Y. Electromechanical bending behavior study of soft photocurable ionogel actuator using: A new finite element method. Smart Mater. Struct. 2016, 25, 095018. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Rod Diameter (mm) | ||
|---|---|---|---|
| 7 | 15 | 28 | |
| Resistance Increase (%) | 115.60 | 112.13 | 107.11 |
| Length Increase (%) | 107.52 | 105.89 | 103.49 |
| Strain (%) | 7.52 | 5.89 | 3.49 |
| Stress of Gel Strips (kPa) | 0.58 | 0.55 | 0.52 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Y.; He, B.; Yan, Z.; Shang, Y.; Wang, Q.; Wang, Z. Touch Locating and Stretch Sensing Studies of Conductive Hydrogels with Applications to Soft Robots. Sensors 2018, 18, 569. https://doi.org/10.3390/s18020569
Zhou Y, He B, Yan Z, Shang Y, Wang Q, Wang Z. Touch Locating and Stretch Sensing Studies of Conductive Hydrogels with Applications to Soft Robots. Sensors. 2018; 18(2):569. https://doi.org/10.3390/s18020569
Chicago/Turabian StyleZhou, Yanmin, Bin He, Zhe Yan, Yinghui Shang, Qigang Wang, and Zhipeng Wang. 2018. "Touch Locating and Stretch Sensing Studies of Conductive Hydrogels with Applications to Soft Robots" Sensors 18, no. 2: 569. https://doi.org/10.3390/s18020569