Compact Hip-Force Sensor for a Gait-Assistance Exoskeleton System

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. A Hip-Force Sensor for a Gait-Enhancing Mechatronic System
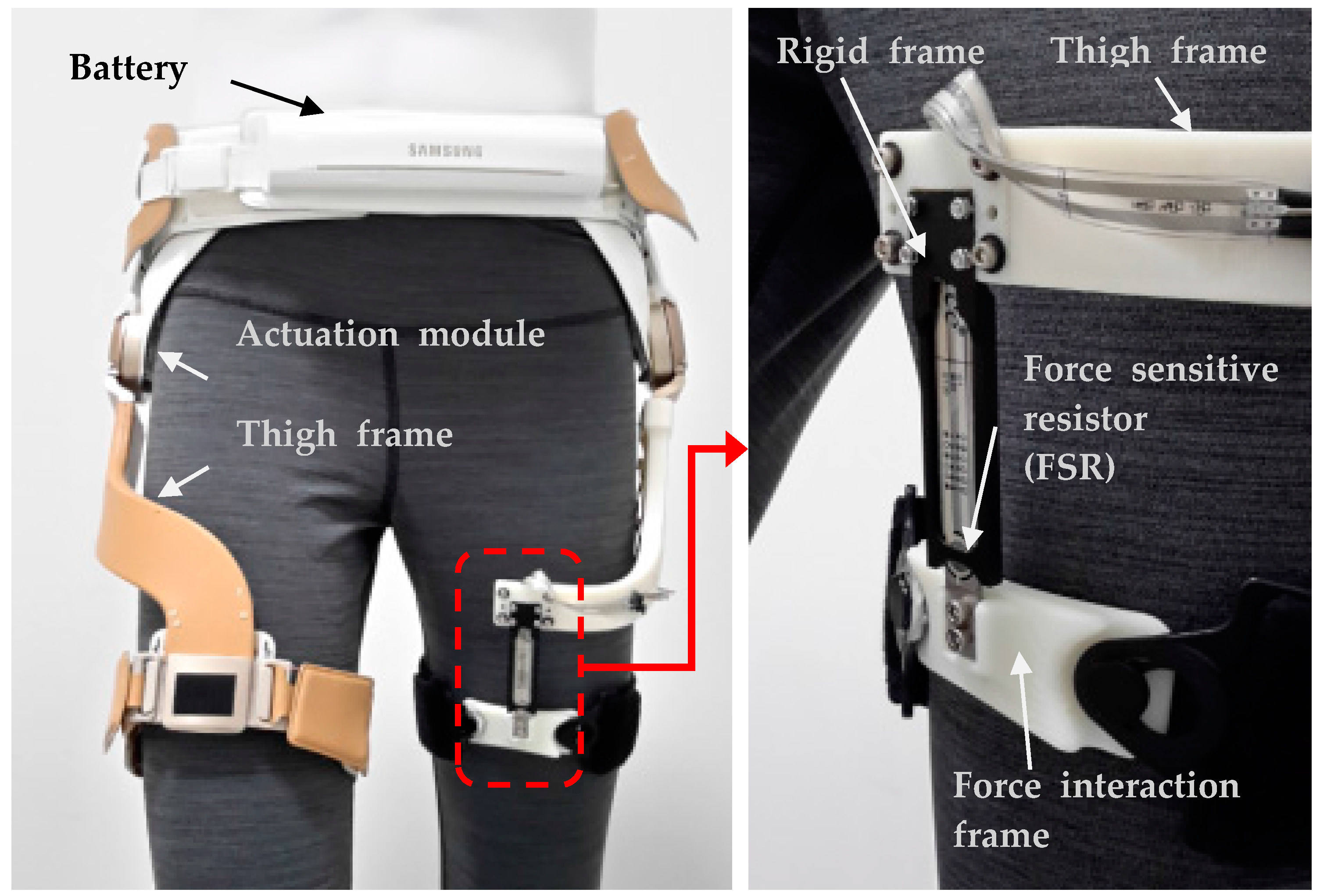
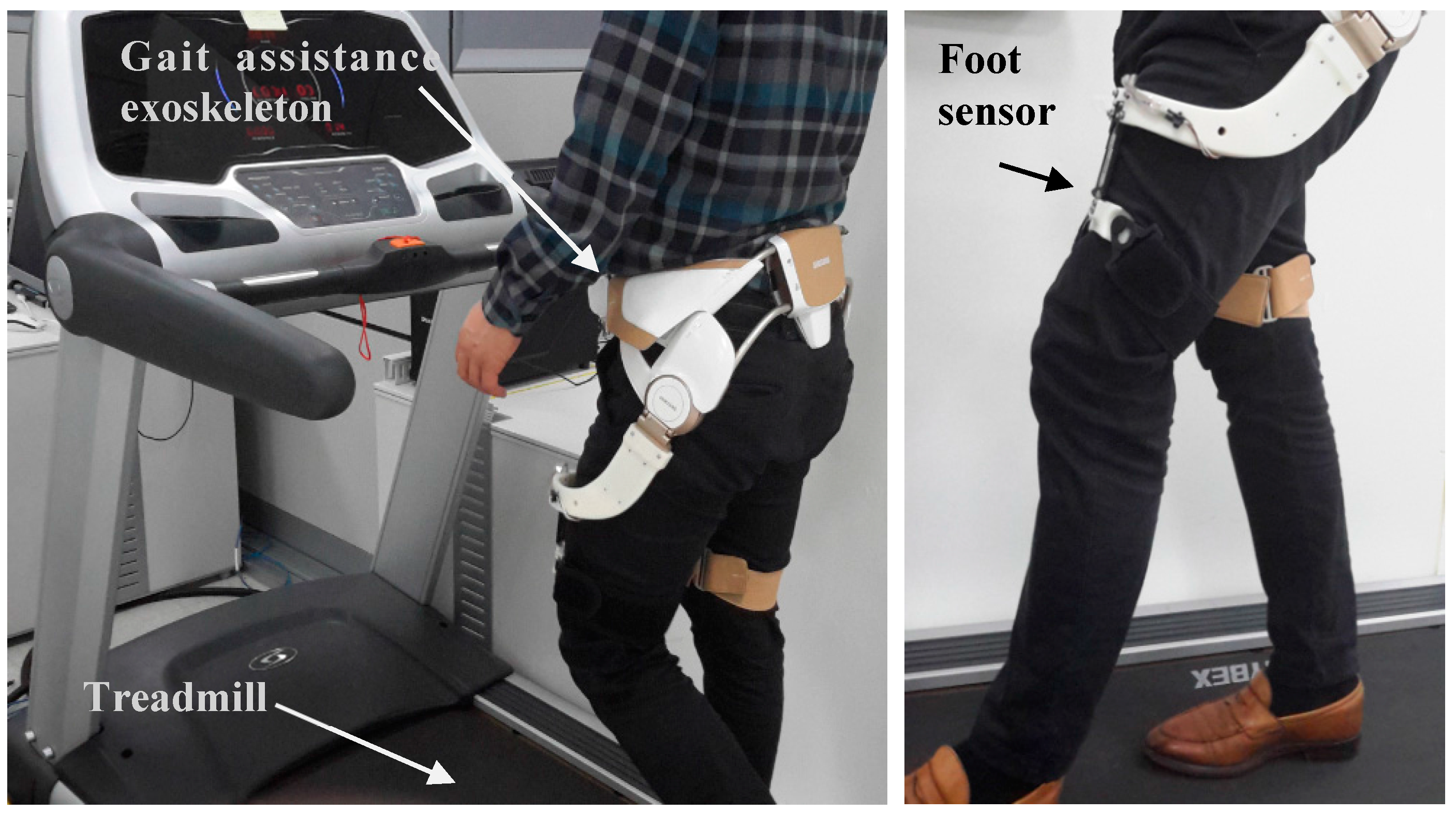
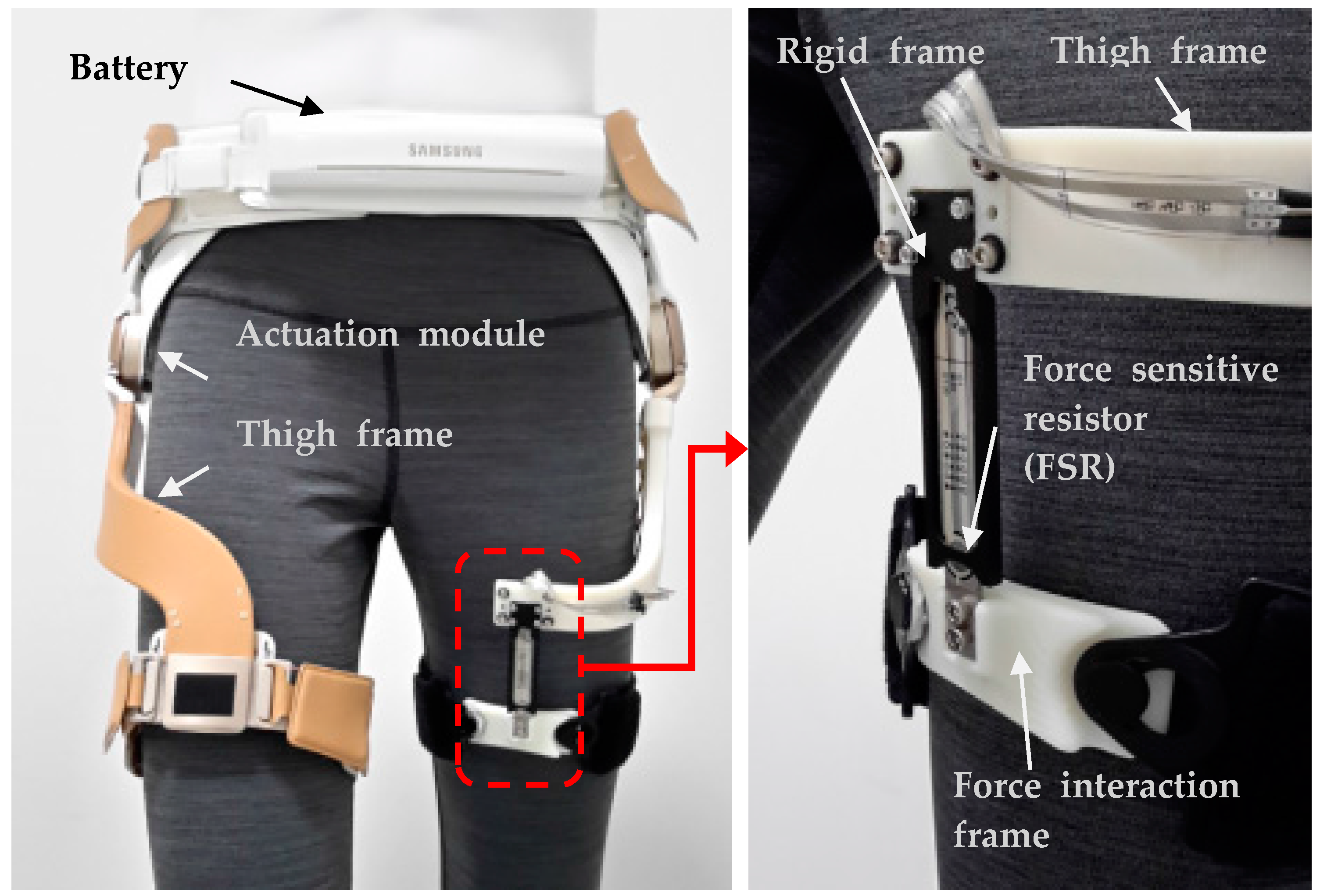
2.1. Autonomous Hip Exoskeleton with a Thin-Force Sensor
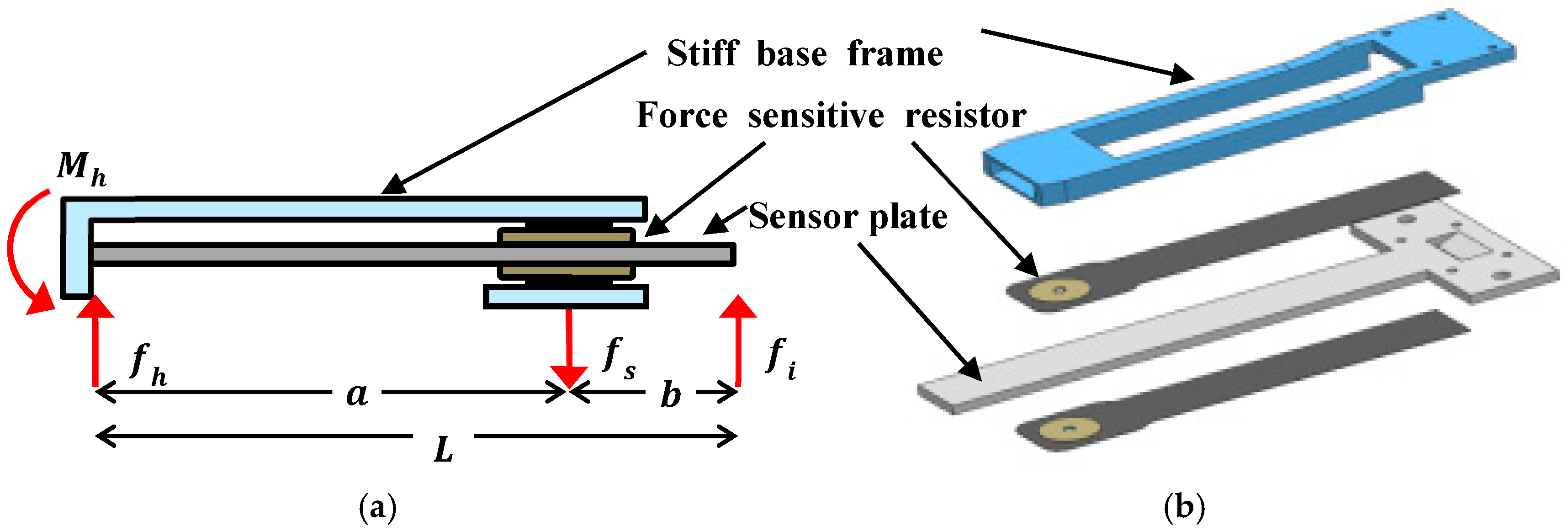
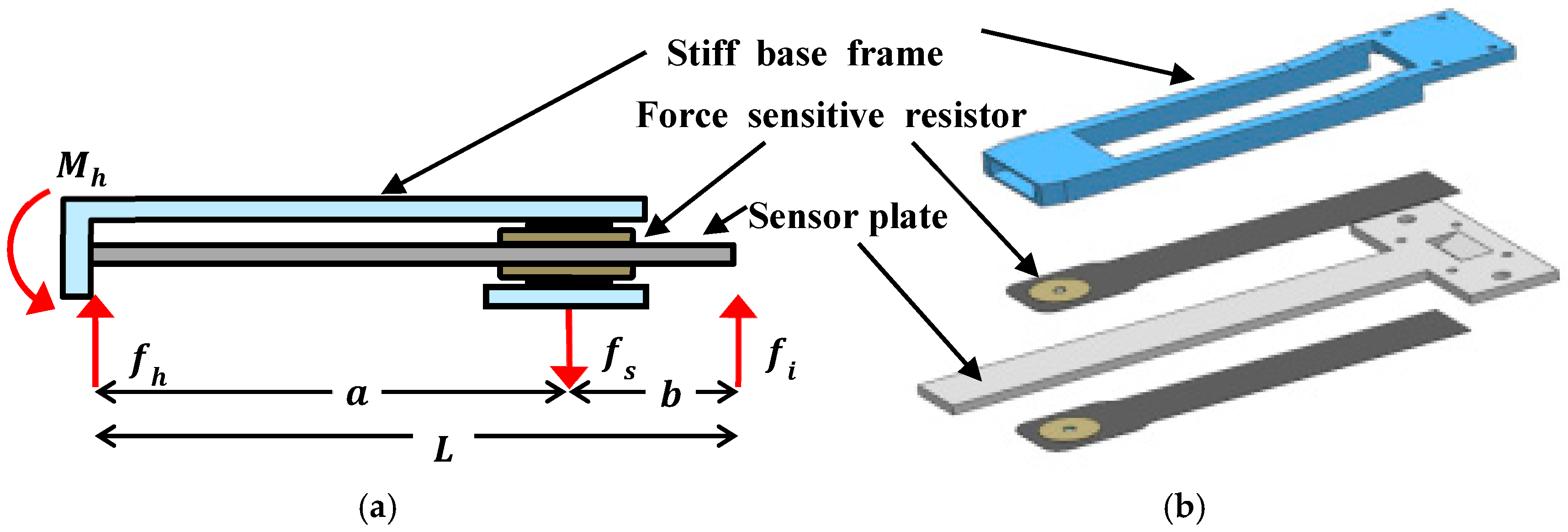
2.2. Design and Modeling of the Hip Force Sensor
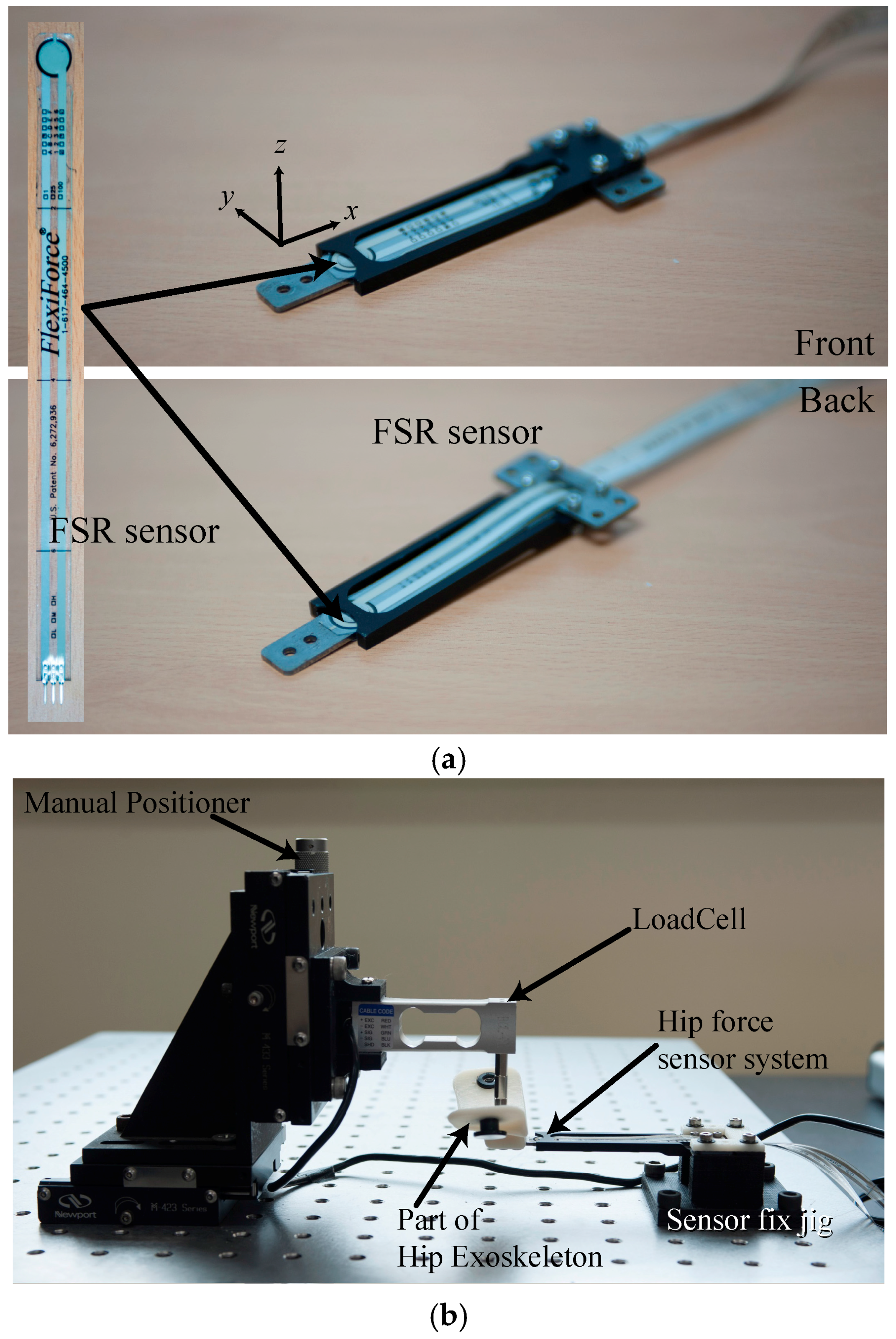
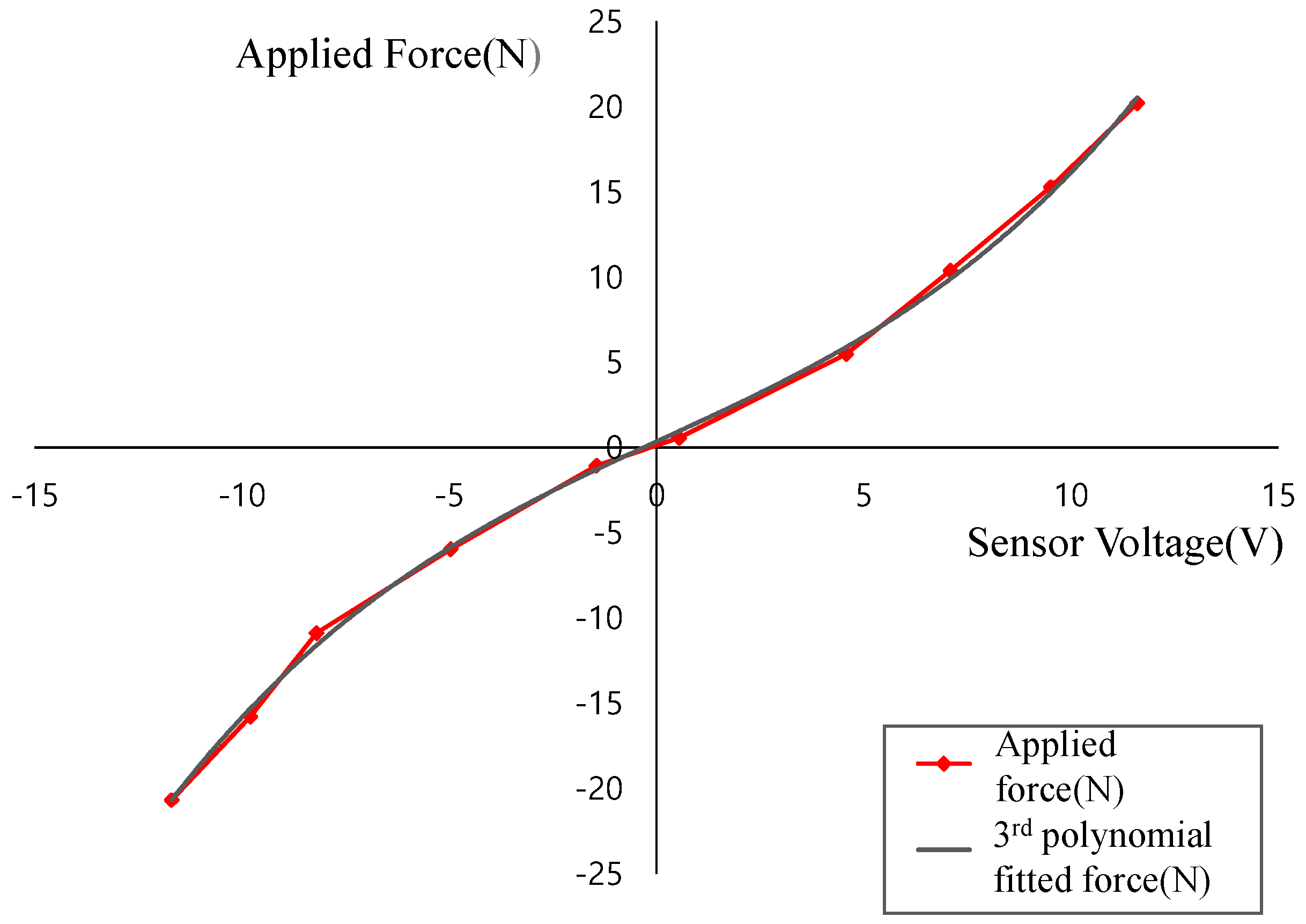
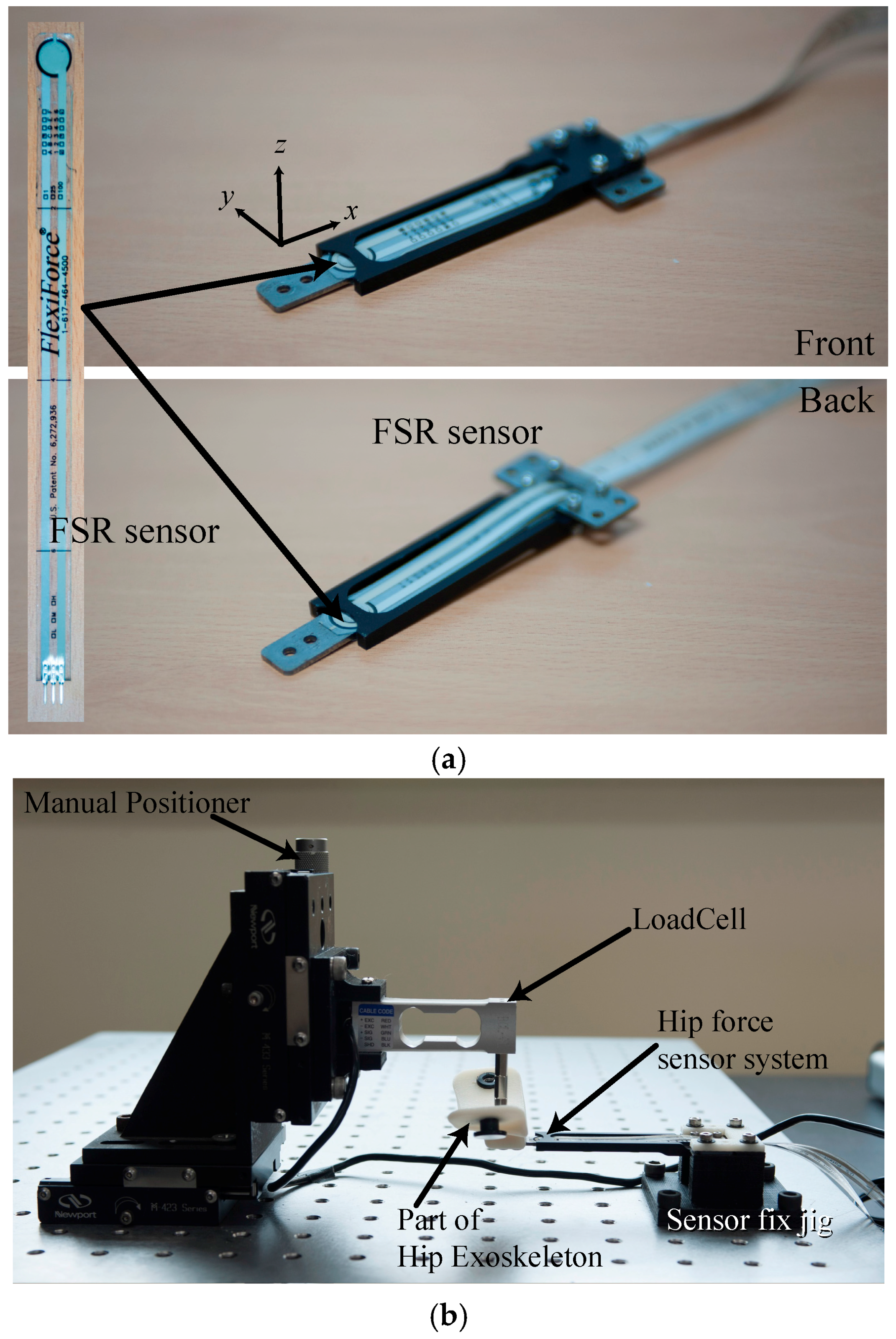
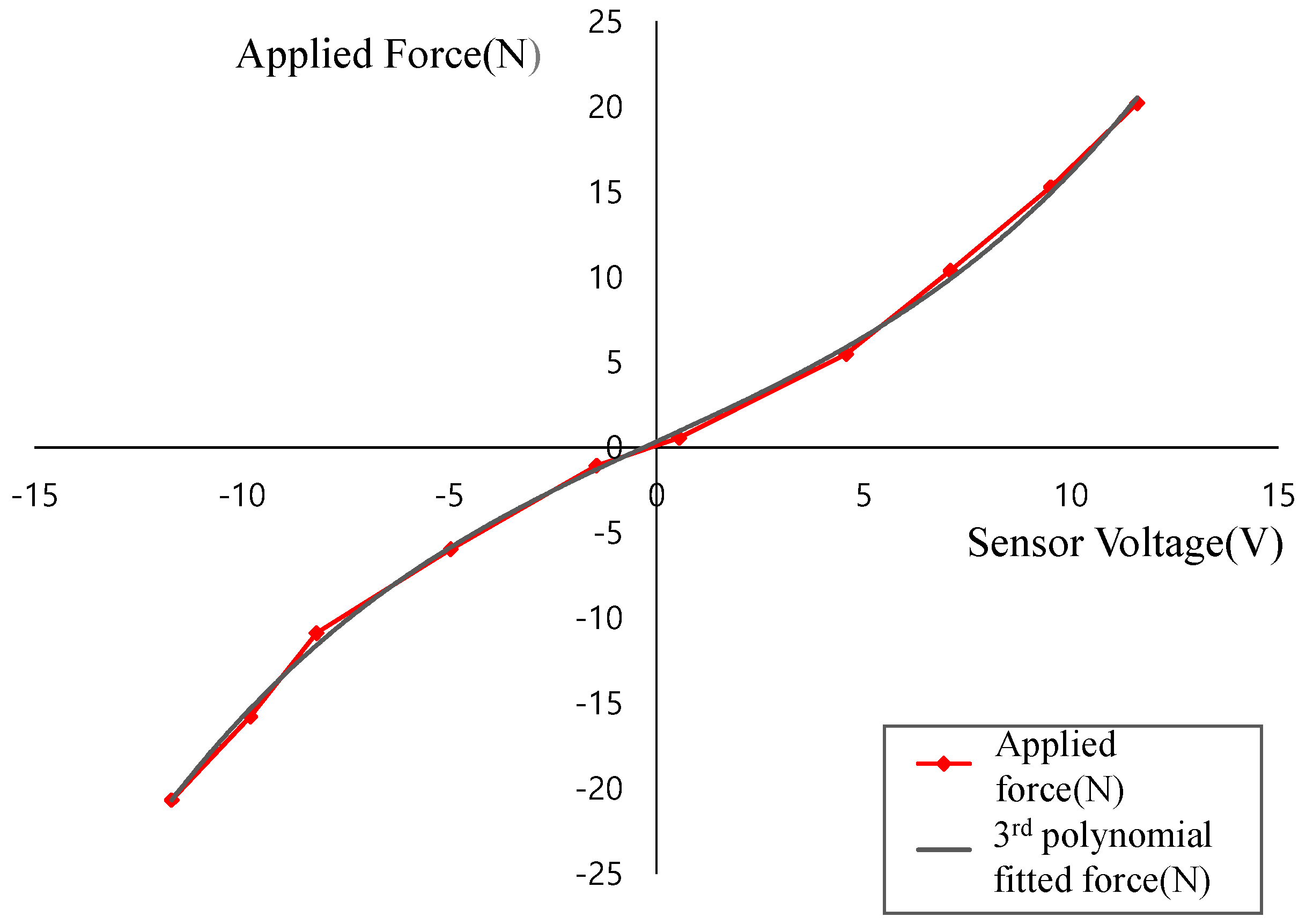
2.3. Calibration of the Force Sensor and Measuring Hip Force
3. Implementation of the Force Sensor in the Gait-Assistance Exoskeleton System
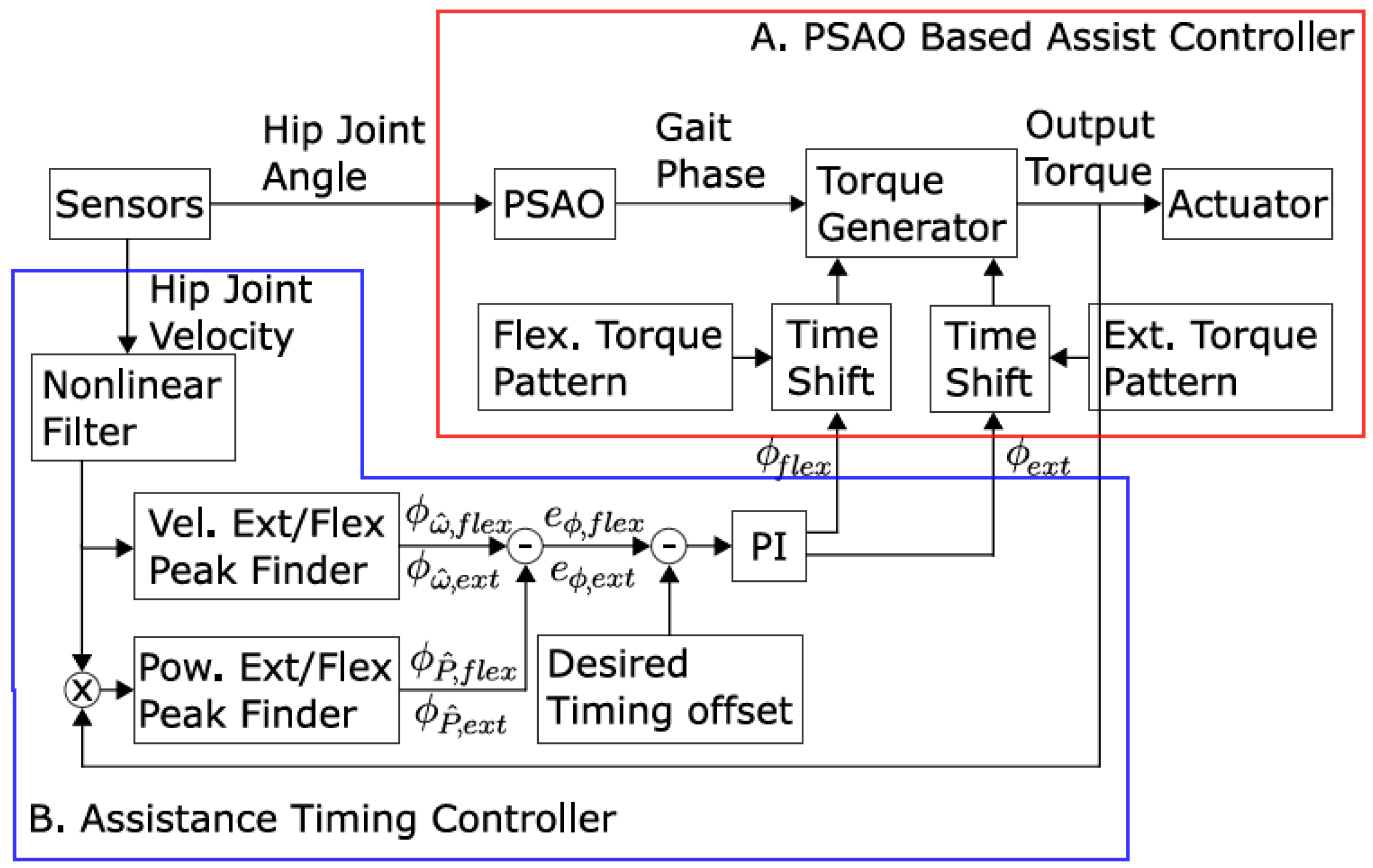
3.1. Control of the Gait-Assistance Exoskeleton System
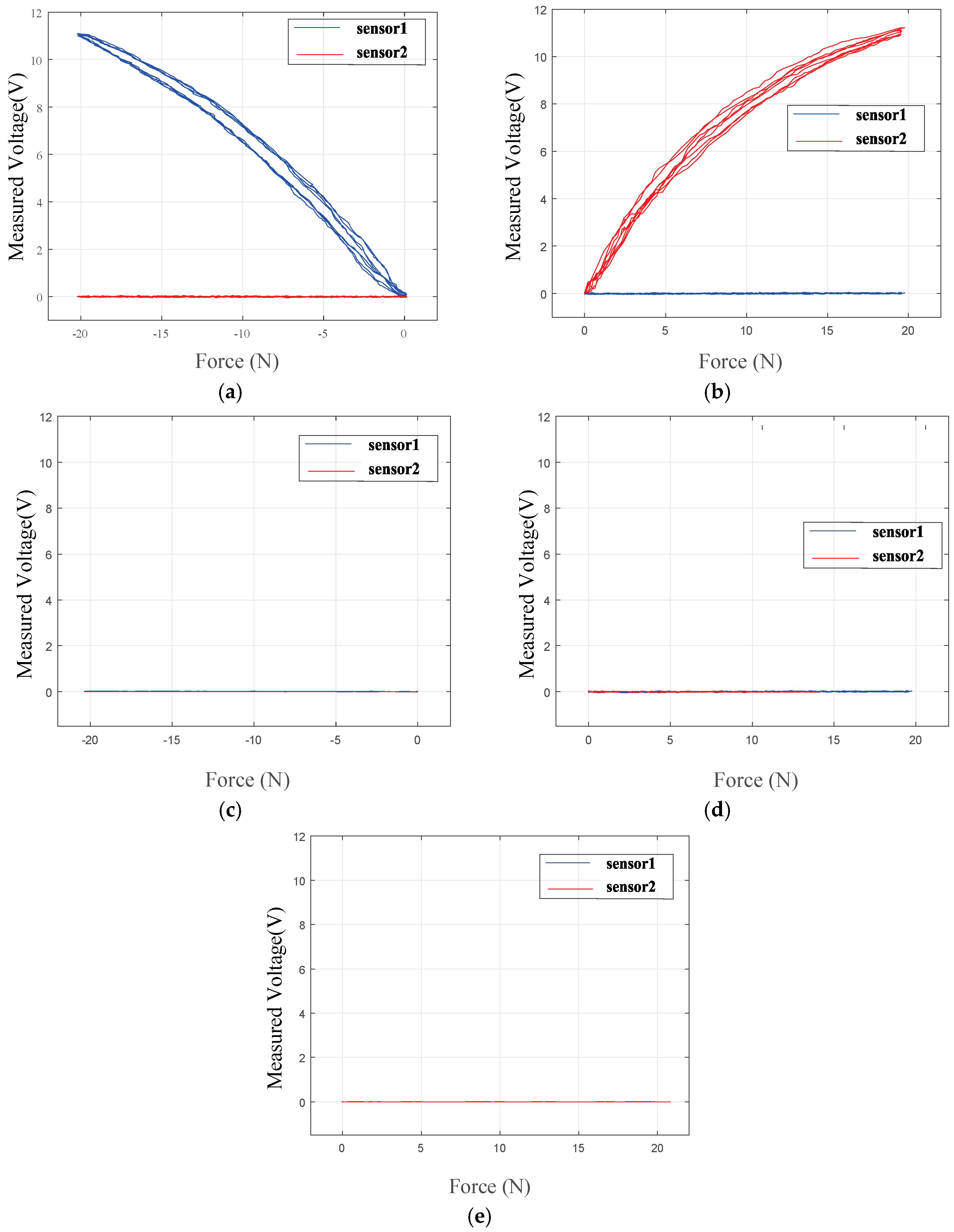
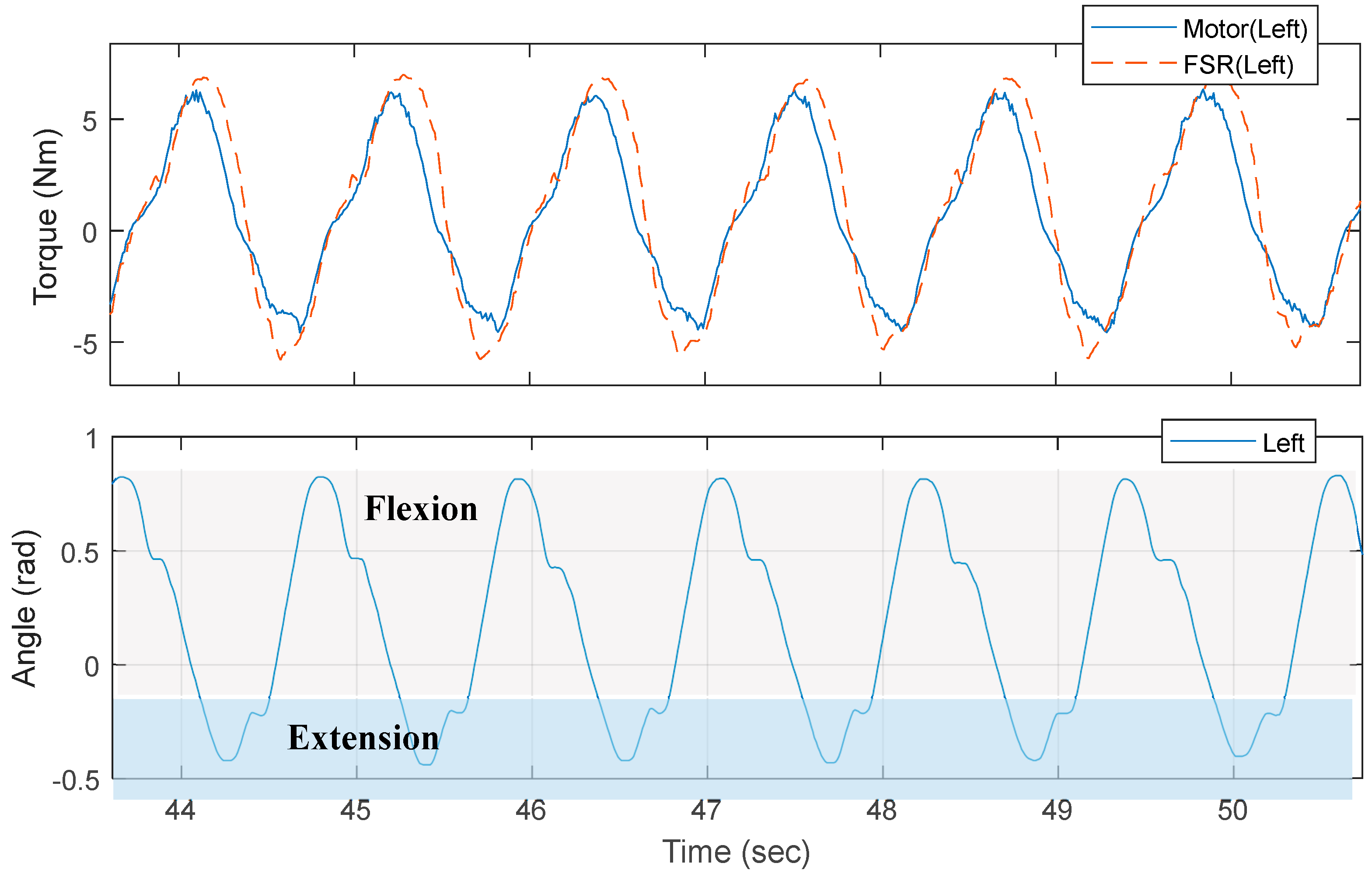
3.2. Force Sensor Test Results
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Cruz-Jentoft, A.J.; Baeyens, J.P.; Bauer, J.M.; Boirie, Y.; Cederholm, T.; Landi, F.; Martin, F.C.; Michel, J.-P.; Rolland, Y.; Schneider, S.M.; et al. Sarcopenia: European consensus on definition and diagnosis: Report of the European working group on Sarcopenia in older people. Age Aging 2010, 39, 412–423. [Google Scholar] [CrossRef] [PubMed]
- Gullberg, B.; Johnell, O.; Kanis, J.A. World-wide projections for hip fracture. Osteoporos. Int. 1997, 7, 407–413. [Google Scholar] [CrossRef] [PubMed]
- Verghese, J.; LeValley, A.; Hall, C.B.; Katz, M.J.; Ambrose, A.F.; Lipton, R.B. Epidemiology of gait disorders in community-residing older adults. J. Am. Geriatr. Soc. 2006, 54, 255–261. [Google Scholar] [CrossRef] [PubMed]
- Ferris, D.P. The exoskeletons are here. J. Neuroeng. Rehabilit. 2009, 6. [Google Scholar] [CrossRef] [PubMed]
- Collins, S.H.; Wiggin, M.B.; Sawicki, G.S. Reducing the energy cost of human walking using an unpowered exoskeleton. Nature 2015, 522, 212–215. [Google Scholar] [CrossRef] [PubMed]
- Zoss, A.B.; Kazerooni, H.; Chu, A. Biomechanical design of the berkeley lower extremity exoskeleton (BLEEX). IEEE/ASME Trans. Mechatron. 2006, 11, 128–138. [Google Scholar] [CrossRef]
- Kim, J.-H.; Shim, M.; Ahn, D.H.; Son, B.J.; Kim, S.-Y.; Kim, D.Y.; Baek, Y.S.; Cho, B.-K. Design of a knee exoskeleton using foot pressure and knee torque sensors. Int. J. Adv. Robot. Syst. 2015, 12. [Google Scholar] [CrossRef]
- Hwang, B.; Jeon, D. A method to accurately estimate the muscular torques of human wearing exoskeletons by torque sensors. Sensors 2015, 15, 8337–8356. [Google Scholar] [CrossRef] [PubMed]
- Yan, T.; Cempini, M.; Oddo, C.M.; Vitiello, N. Review of assistive strategies in powered lower-limb orthoses and exoskeletons. Robot. Auton. Syst. 2015, 64, 120–136. [Google Scholar] [CrossRef]
- Sanz-Merodio, D.; Cestari, M.; Arevalo, J.C.; Garcia, E. A lower-limb exoskeleton for gait assistance in quadriplegia. In Proceedings of the 2012 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guangzhou, China, 11–14 December 2012; pp. 122–127. [Google Scholar]
- Sankai, Y. Hal: Hybrid assistive limb based on cybernics. In Robotics Research; Kaneko, M., Nakamura, Y., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 25–34. [Google Scholar]
- Farris, R.J.; Quintero, H.A.; Goldfarb, M. Preliminary evaluation of a powered lower limb orthosis to aid walking in paraplegic individuals. IEEE Trans. Neural Syst. Rehabilit. Eng. 2011, 19, 652–659. [Google Scholar] [CrossRef] [PubMed]
- Lim, B.; Kyungrock, K.; Jusuk, L.; Junwon, J.; Youngbo, S. An event-driven control to achieve adaptive walking assist with gait primitives. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 5870–5875. [Google Scholar]
- Lenzi, T.; Carrozza, M.C.; Agrawal, S.K. Powered hip exoskeletons can reduce the user’s hip and ankle muscle activations during walking. IEEE Trans. Neural Syst. Rehabilit. Eng. 2013, 21, 938–948. [Google Scholar] [CrossRef] [PubMed]
- Holgate, M.A.; Sugar, T.G.; Bohler, A.W. A novel control algorithm for wearable robotics using phase plane invariants. In Proceedings of the 2009 ICRA ’09 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3845–3850. [Google Scholar]
- Nagarajan, U.; Goswami, A. Improved mobility with a neutral, motion-amplifying controller for an experimental exoskeleton. SAE Int. J. Passeng. Cars-Mech. Syst. 2015, 8, 606–613. [Google Scholar] [CrossRef]
- Seo, K.; Lee, J.; Lee, Y.; Ha, T.; Shim, Y. Fully autonomous hip exoskeleton saves metabolic cost of walking. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 4628–4635. [Google Scholar]
- Hyon, S.H.; Morimoto, J.; Matsubara, T.; Noda, T.; Kawato, M. Xor: Hybrid drive exoskeleton robot that can balance. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 3975–3981. [Google Scholar]
- Lenzi, T.; Rossi, S.M.M.D.; Vitiello, N.; Carrozza, M.C. Intention-based emg control for powered exoskeletons. IEEE Trans. Biomed. Eng. 2012, 59, 2180–2190. [Google Scholar] [CrossRef] [PubMed]
- Yin, Y.H.; Fan, Y.J.; Xu, L.D. EMG and EPP-integrated human-machine interface between the paralyzed and rehabilitation exoskeleton. IEEE Trans. Inf. Technol. Biomed. 2012, 16, 542–549. [Google Scholar] [CrossRef] [PubMed]
- Perry, J.C.; Powell, J.M.; Rosen, J. Isotropy of an upper limb exoskeleton and the kinematics and dynamics of the human arm. Appl. Bion. Biomech. 2009, 6, 175–191. [Google Scholar] [CrossRef]
- Kong, K.; Moon, H.; Jeon, D.; Tomizuka, M. Control of an exoskeleton for realization of aquatic therapy effects. IEEE/ASME Trans. Mechatron. 2010, 15, 191–200. [Google Scholar] [CrossRef]
- Rocon, E.; Pons, J.L. Exoskeletons in Rehabilitation Robotics: Tremor Suppression; Springer: Berlin, Germany, 2011; Volume 69. [Google Scholar]
- Zanotto, D.; Akiyama, Y.; Stegall, P.; Agrawal, S.K. Knee joint misalignment in exoskeletons for the lower extremities: Effects on user’s gait. IEEE Trans. Robot. 2015, 31, 978–987. [Google Scholar] [CrossRef]
- Jang, J.; Kyungrock, K.; Jusuk, L.; Bokman, L.; Youngbo, S. Online gait task recognition algorithm for hip exoskeleton. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 5327–5332. [Google Scholar]
- Choi, H.; Park, Y.J.; Seo, K.; Lee, J.; Lee, S.-E.; Shim, Y. A multifunctional ankle exoskeleton for mobility enhancement of gait-impaired individuals and seniors. IEEE Robot. Autom. Lett. 2018, 3, 411–418. [Google Scholar] [CrossRef]
- Lee, Y.; Kim, Y.-J.; Lee, J.; Lee, M.; Choi, B.; Kim, J.; Park, Y.J.; Choi, J. Biomechanical design of a novel flexible exoskeleton for lower extremities. IEEE/ASME Trans. Mechatron. 2017, 22, 2058–2069. [Google Scholar] [CrossRef]
- Duong, M.K.; Cheng, H.; Tran, H.T.; Jing, Q. Minimizing human-exoskeleton interaction force using compensation for dynamic uncertainty error with adaptive RBF network. J. Intell. Robot. Syst. 2016, 82, 413–433. [Google Scholar] [CrossRef]
- Yang, Z.; Zhu, Y.; Yang, X.; Zhang, Y. Impedance control of exoskeleton suit based on adaptive RBF neural network. In Proceedings of the 2009 IHMSC ’09 International Conference on Intelligent Human-Machine Systems and Cybernetics, Hangzhou, China, 26–27 August 2009; pp. 182–187. [Google Scholar]
- Lee, H.-J.; Lee, S.; Chang, W.H.; Seo, K.; Shim, Y.; Choi, B.-O.; Ryu, G.-H.; Kim, Y.-H. A wearable hip assist robot can improve gait function and cardiopulmonary metabolic efficiency in elderly adults. IEEE Trans. Neural Syst. Rehabilit. Eng. 2017, 25, 1549–1557. [Google Scholar] [CrossRef] [PubMed]
- Lee, H.; Lee, S.; Kim, D.; Chang, W.; Choi, B.; Ryu, G.; Kim, Y. Recovery of locomotion function and cardiopulmonary metabolic energy efficiency of intensive gait training with wearable hip-assist robot in stroke patients. In Proceedings of the International Neurorehabilitation Symposium, London, UK, 18–20 July 2017. [Google Scholar]
- Hwang, S.; Hong, Y.; Lee, H.; Kim, Y.; Choi, B. Hip assist robot reduces metabolic energy cost in patients with neuromuscular disease during walking. In Proceedings of the 51th Korean society of Medical & Biological Engineering, Pusan, Korea, 13 May 2016; pp. 1–55. [Google Scholar]
- Lee, Y.; Choi, B.; Lee, J.; Lee, M.; Roh, S.-G.; Kim, J.; Choi, H.; Kim, Y.-J. Flexible sliding frame for gait enhancing mechatronic system (GEMs). In Proceedings of the 2016 IEEE 38th Annual International Conference of the Engineering in Medicine and Biology Society (EMBC), Orlando, FL, USA, 17–20 August 2016; pp. 598–602. [Google Scholar]
- Giovanelli, D.; Farella, E. Force sensing resistor and evaluation of technology for wearable body pressure sensing. J. Sens. 2016, 2016. [Google Scholar] [CrossRef]
- Khodasevych, I.; Parmar, S.; Troynikov, O. Flexible sensors for pressure therapy: Effect of substrate curvature and stiffness on sensor performance. Sensors 2017, 17, 2399. [Google Scholar] [CrossRef] [PubMed]
- Flórez, J.; Velasquez, A. Calibration of force sensing resistors (FSR) for static and dynamic applications. In Proceedings of the 2010 IEEE ANDESCON, Bogota, Colombia, 15–17 September 2010; pp. 1–6. [Google Scholar]
- Jones, L.; Hunter, I.; Irwin, R. Differential thresholds for limb movement measured using adaptive techniques. Percept. Psychophys. 1992, 52, 529–535. [Google Scholar] [CrossRef] [PubMed]
- Feyzabadi, S.; Straube, S.; Folgheraiter, M.; Kirchner, E.A.; Kim, S.K.; Albiez, J.C. Human force discrimination during active arm motion for force feedback design. IEEE Trans. Haptics 2013, 6, 309–319. [Google Scholar] [CrossRef] [PubMed]
- Khabbaz, F.H.; Goldenberg, A.; Drake, J. Force discrimination ability of the human hand near absolute threshold for the design of force feedback systems in teleoperations. Presence Teleoper. Virtual Environ. 2016, 25, 47–60. [Google Scholar] [CrossRef]
- Lee, J.; Seo, K.; Lim, B.; Jang, J.; Kim, K.; Choi, H. Effects of assistance timing on metabolic cost, assistance power and gait parameters for a hip-type exoskeleton. In Proceedings of the 2017 IEEE International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; pp. 498–504. [Google Scholar]
- Young, A.J.; Ferris, D.P. State of the art and future directions for lower limb robotic exoskeletons. IEEE Trans. Neural Syst. Rehabilit. Eng. 2017, 25, 171–182. [Google Scholar] [CrossRef] [PubMed]
- Chen, B.; Ma, H.; Qin, L.-Y.; Gao, F.; Chan, K.-M.; Law, S.-W.; Qin, L.; Liao, W.-H. Recent developments and challenges of lower extremity exoskeletons. J. Orthop. Transl. 2016, 5, 26–37. [Google Scholar] [CrossRef]
- Dinh, B.K.; Xiloyannis, M.; Cappello, L.; Antuvan, C.W.; Yen, S.-C.; Masia, L. Adaptive backlash compensation in upper limb soft wearable exoskeletons. Robot. Auton. Syst. 2017, 92, 173–186. [Google Scholar] [CrossRef]
- Chen, D.; Yun, Y.; Deshpande, A.D. Experimental characterization of bowden cable friction. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 5927–5933. [Google Scholar]
- Do, T.; Tjahjowidodo, T.; Lau, M.; Phee, S. Adaptive control for enhancing tracking performances of flexible tendon–sheath mechanism in natural orifice transluminal endoscopic surgery. Mechatronics 2015, 28, 67–78. [Google Scholar] [CrossRef]
- Schiele, A.; Letier, P.; Van Der Linde, R.; Van Der Helm, F. Bowden cable actuator for force-feedback exoskeletons. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 3599–3604. [Google Scholar]


© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, H.; Seo, K.; Hyung, S.; Shim, Y.; Lim, S.-C. Compact Hip-Force Sensor for a Gait-Assistance Exoskeleton System. Sensors 2018, 18, 566. https://doi.org/10.3390/s18020566
Choi H, Seo K, Hyung S, Shim Y, Lim S-C. Compact Hip-Force Sensor for a Gait-Assistance Exoskeleton System. Sensors. 2018; 18(2):566. https://doi.org/10.3390/s18020566
Chicago/Turabian StyleChoi, Hyundo, Keehong Seo, Seungyong Hyung, Youngbo Shim, and Soo-Chul Lim. 2018. "Compact Hip-Force Sensor for a Gait-Assistance Exoskeleton System" Sensors 18, no. 2: 566. https://doi.org/10.3390/s18020566
APA StyleChoi, H., Seo, K., Hyung, S., Shim, Y., & Lim, S.-C. (2018). Compact Hip-Force Sensor for a Gait-Assistance Exoskeleton System. Sensors, 18(2), 566. https://doi.org/10.3390/s18020566