An Improved Quadrilateral Fitting Algorithm for the Water Column Contribution in Airborne Bathymetric Lidar Waveforms

 , ,
, ,
Abstract
1. Introduction
2. Description of Datasets
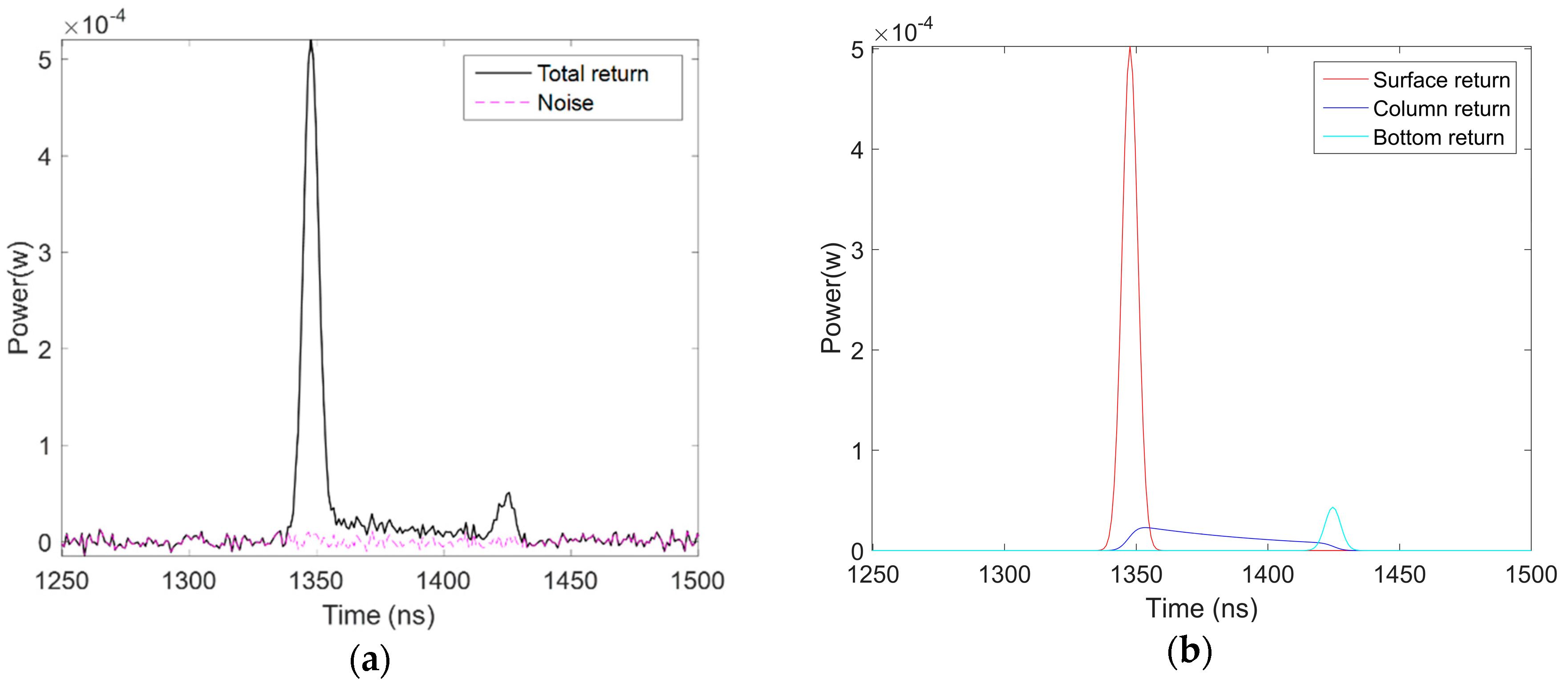
2.1. Simulated Dataset
2.2. Real Dataset
3. Methods
3.1. Mathematical Approximation Method
3.1.1. Triangular Fitting Algorithm
3.1.2. Quadrilateral Fitting Algorithm
3.1.3. Improved Quadrilateral Fitting Algorithm
3.2. Methodology for the Comparison
- (1)
- The success rate, which is defined as the percentage of successfully detected points (points with ≥2 returns detected and errors of less than 1 m):
- (2)
- The false discovery rate, which is defined as the percentage of wrongly detected points (points with ≥2 returns detected and errors larger than 1 m):
- (3)
- The bias, which is defined as the difference between an estimated expected value and the true value of the parameter being estimated, where and are the estimated and true water depths for the ith case, and N is the number of forward modeling cases:
- (4)
- The STD is used to quantify the amount of variation or dispersion of a set of data values, where is the mean of the estimated water depths ():
- (5)
- The root-mean-square error (RMSE) between the true and estimated values of the depth of water under different parameter settings:
- (6)
- R-squared (R2), to estimate the fitness of the true depths of the successfully detected points, where NS is the number of successfully detected points, and is the mean of the true water depths (D):
- (7)
- The time cost (T), to evaluate the efficiency of the algorithm. We adopted parallel computing (eight CPU cores used simultaneously) to accelerate the computations in this paper.
4. Results and Discussion
4.1. Simulated Dataset
4.1.1. Performance Assessments
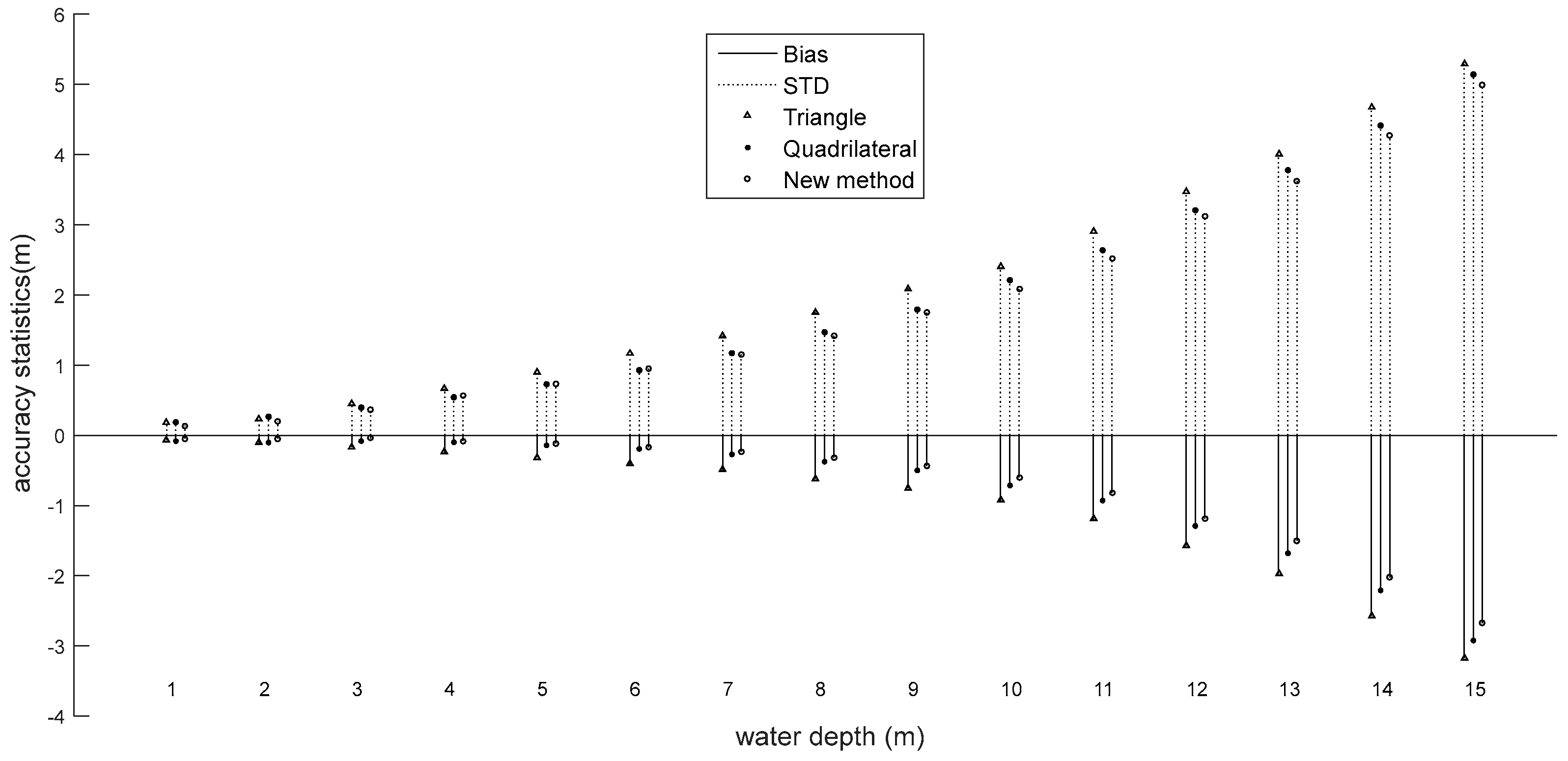
4.1.2. Accuracy Calculations
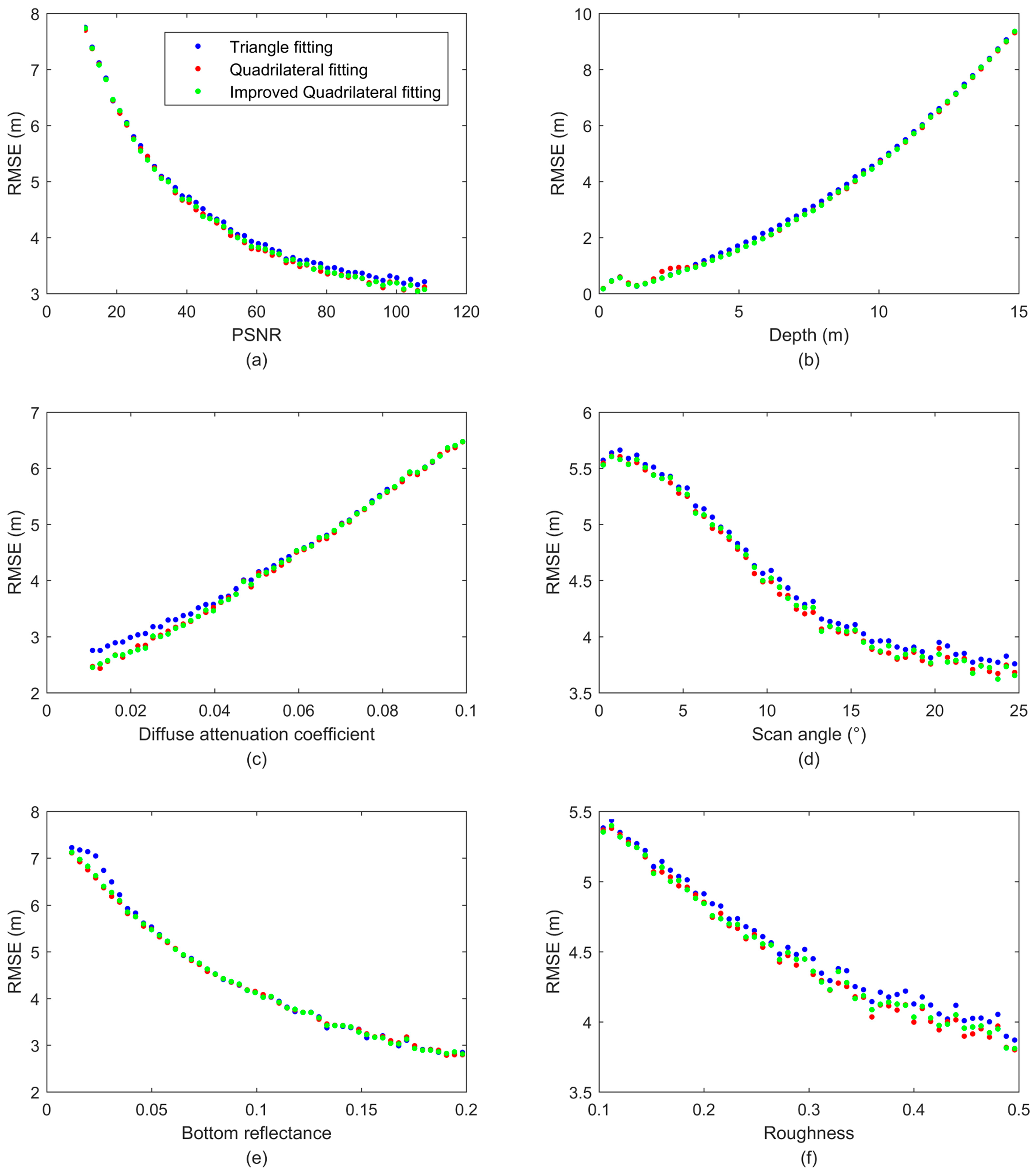
4.1.3. RMSE Changes in the Function of One Parameter
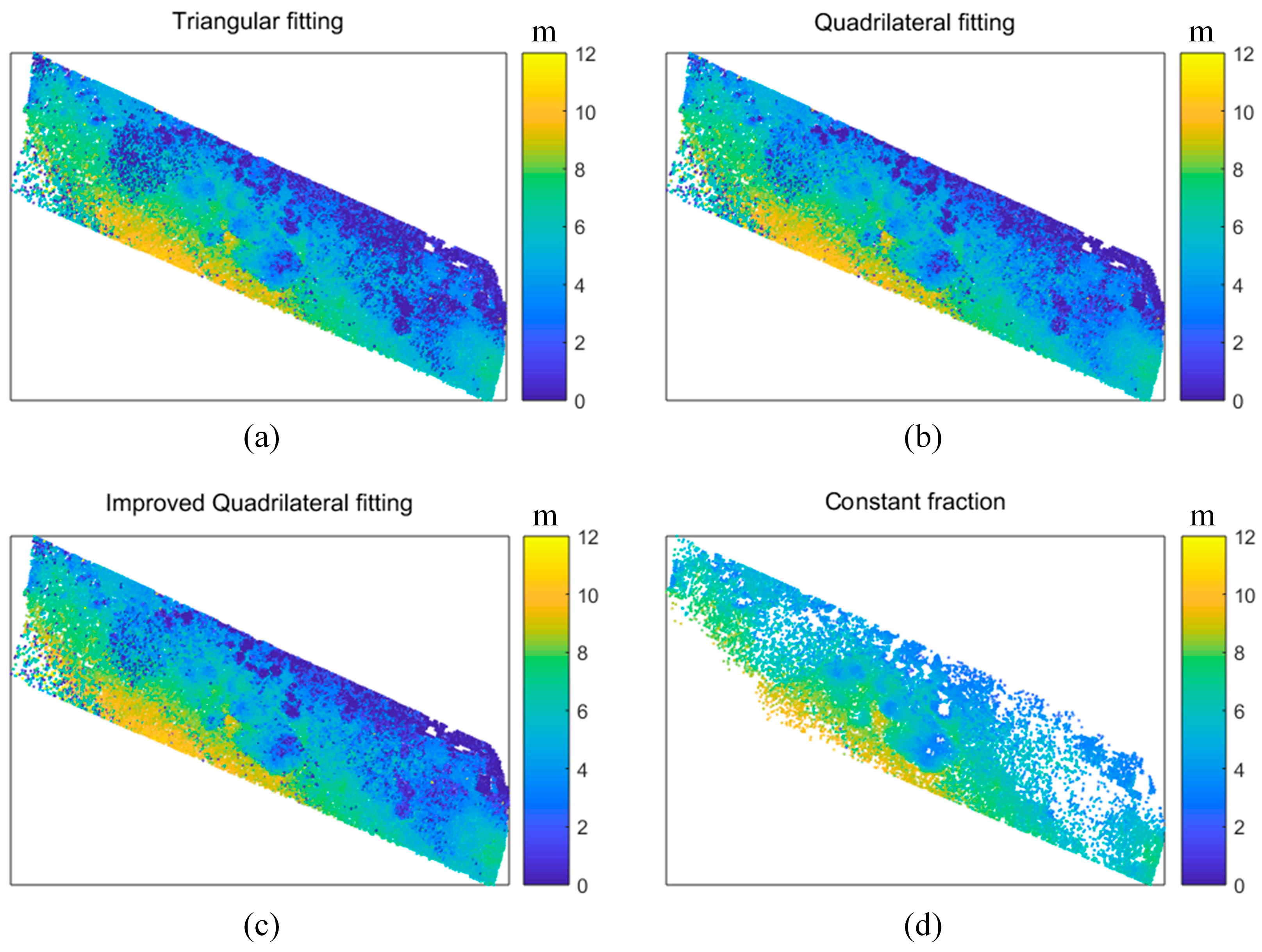
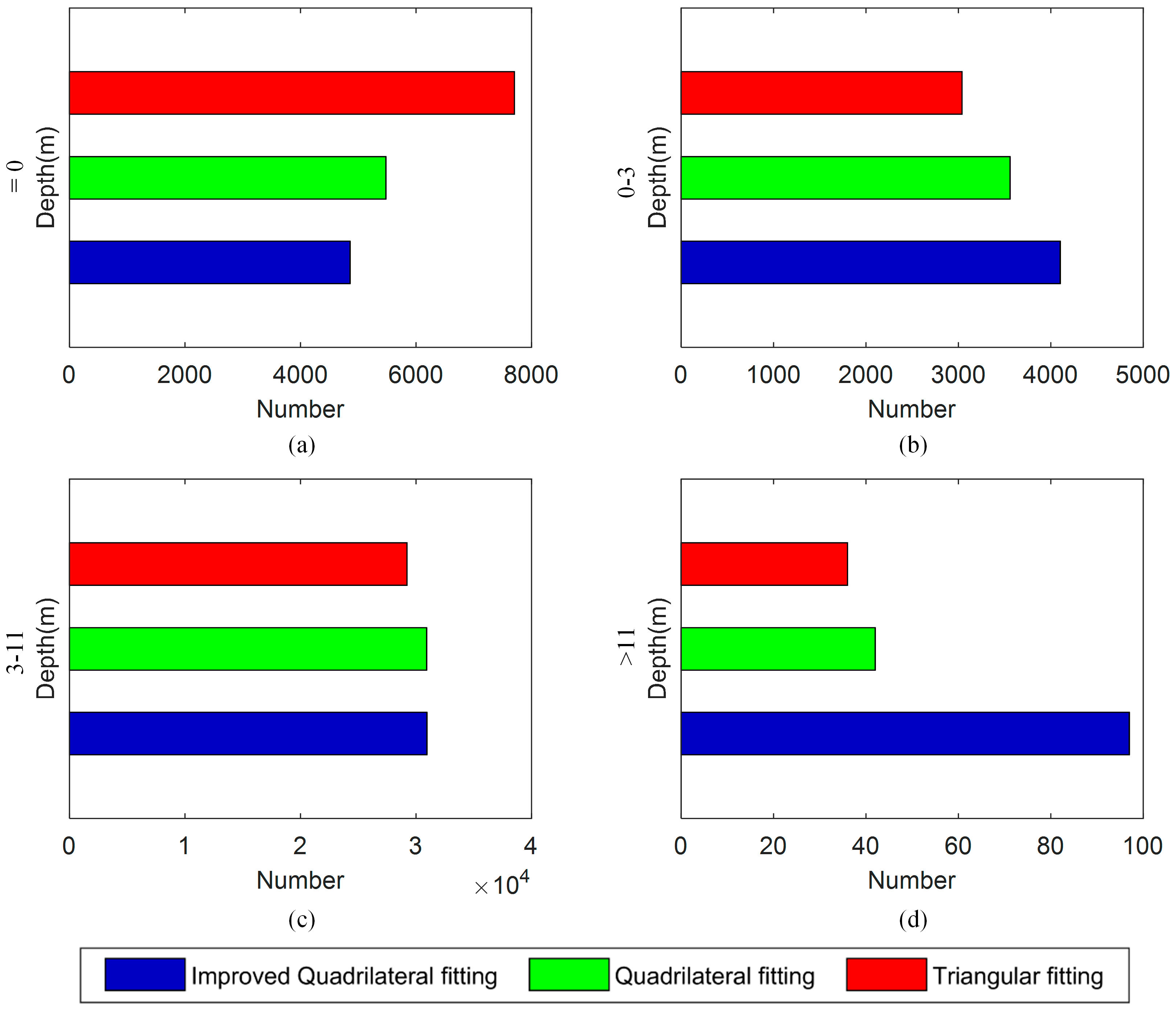
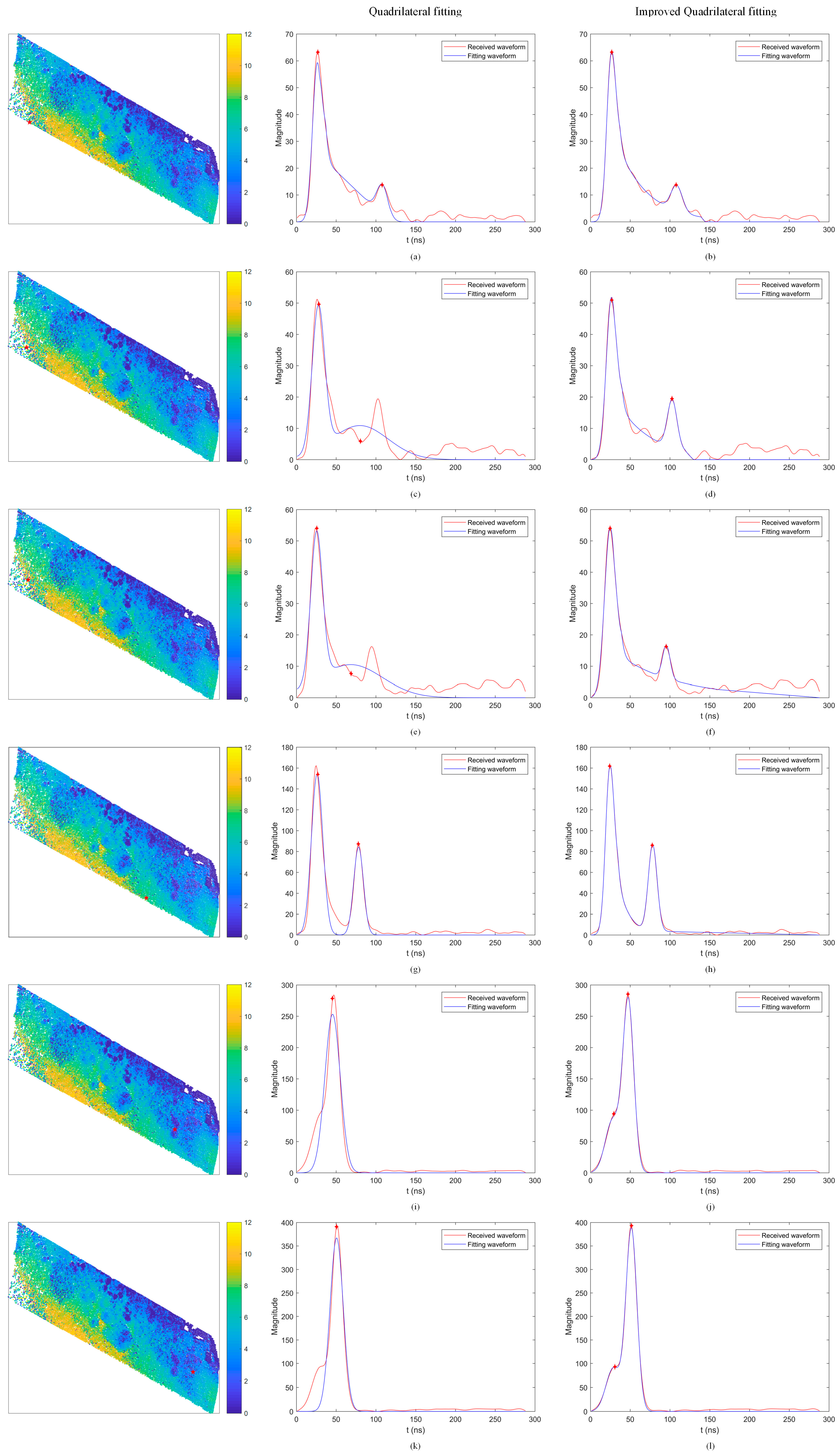
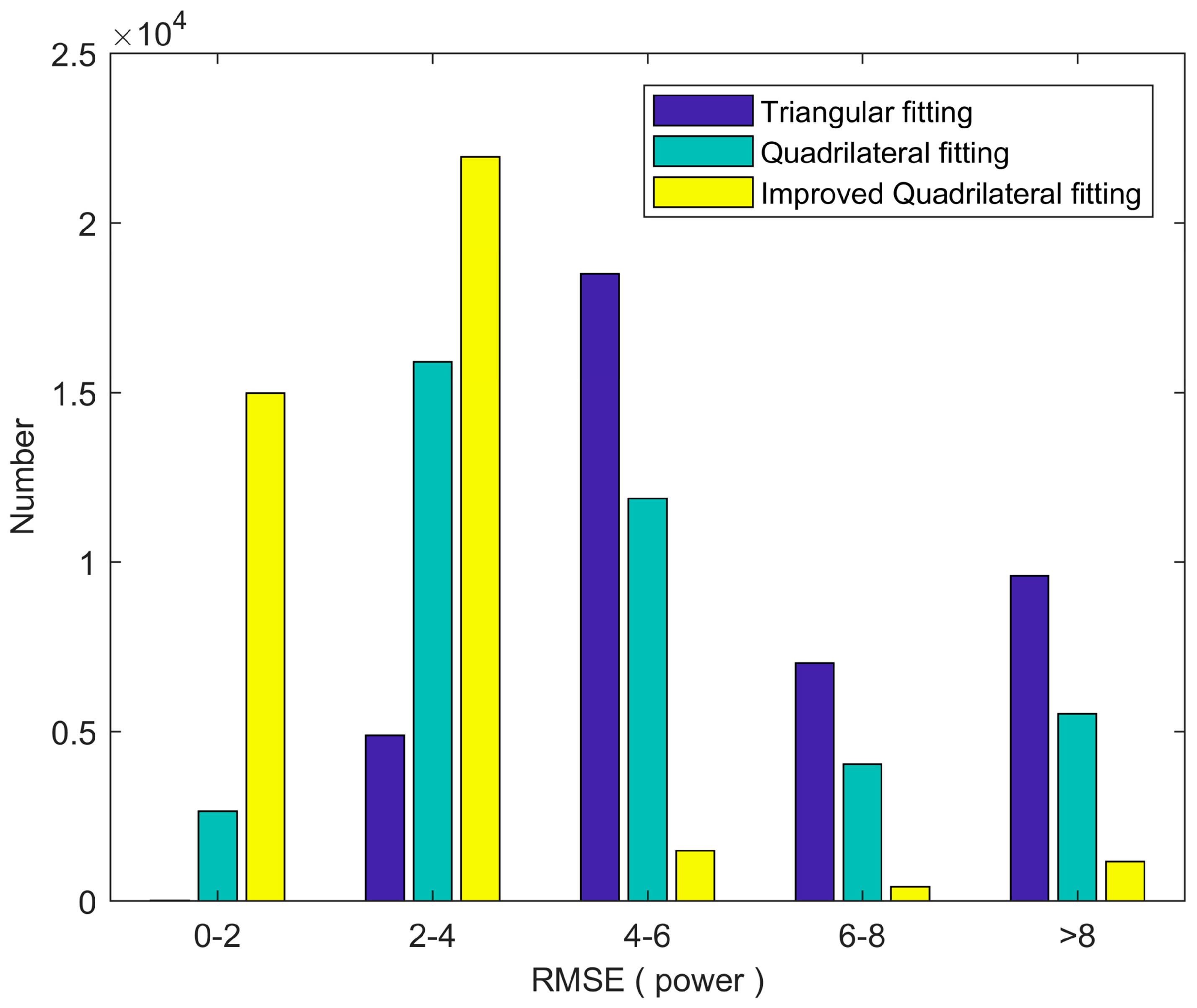
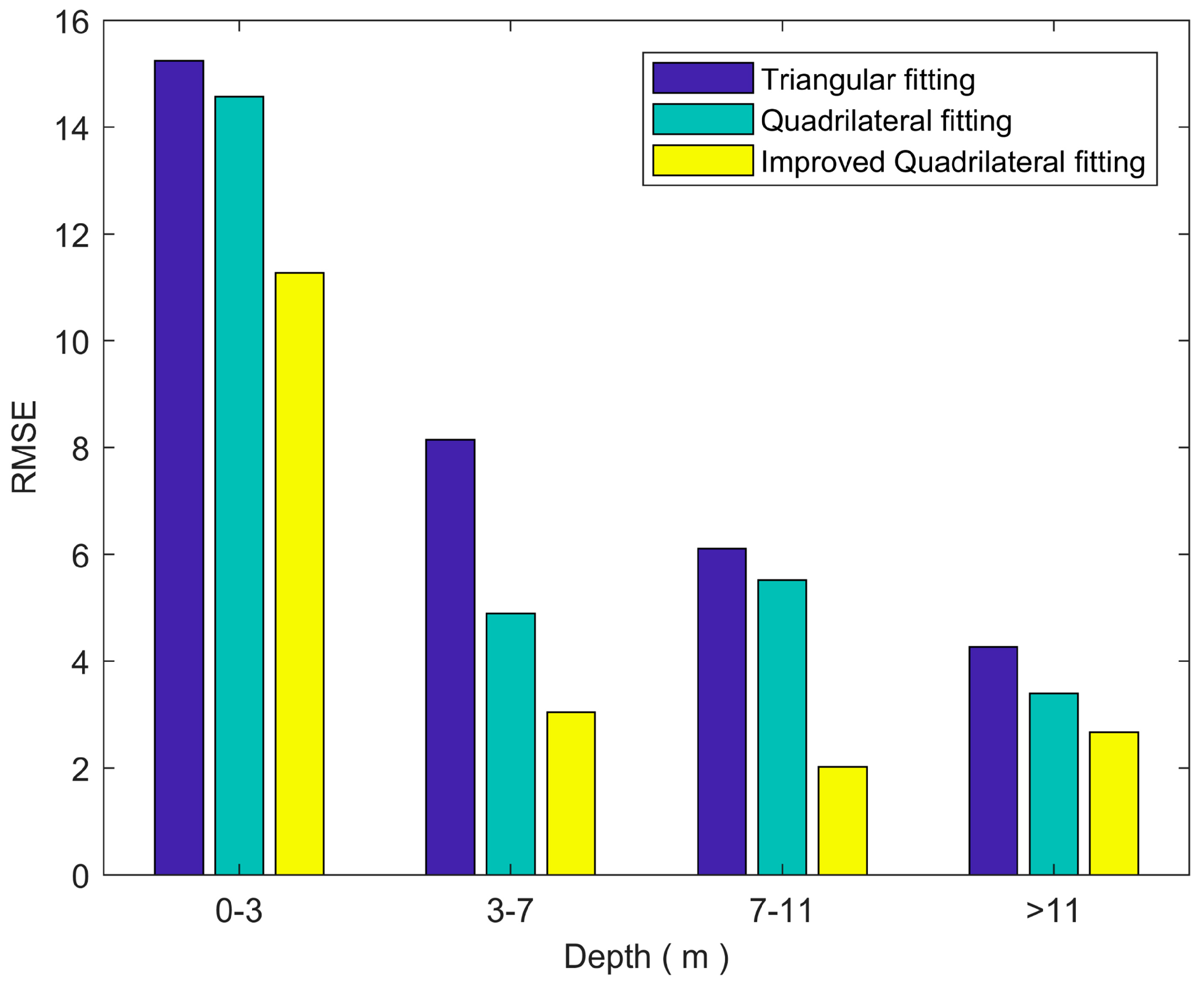
4.2. Real Dataset
5. Conclusions
- (1)
- The new fitting algorithm we presented shows an improvement over the water depth retrieved by the triangular fitting algorithm and the existing quadrilateral fitting algorithm, however, its disadvantage is that it costs the most time, due to its nonlinear curve fitting. The triangular fitting algorithm requires the least time, but its disadvantage is that the number of detected waveforms is less than for the other two algorithms, and it obtains a relatively high RMSED for the retrieved water depth and a higher false discovery rate. Through experiments by using simulated dataset and real dataset, we can find that the new quadrilateral function shows a better fit to the shape of the water column return than the existing quadrilateral function. Therefore, it’s much easier to get the surface and bottom locations by using the improved quadrilateral fitting algorithm.
- (2)
- For the simulated dataset, using the improved quadrilateral function, the results show an improvement of 0.269 m and 0.092 m in bias compared with the triangular fitting algorithm and the existing quadrilateral fitting algorithm. In addition, the overall STD shows an improvement of 0.282 m and 0.123 m when using the improved quadrilateral fitting procedure compared with the triangular fitting algorithm and the existing quadrilateral fitting algorithm. For the real dataset, comparing the other two algorithms, the improved quadrilateral fitting algorithm retrieved the least noise and the least number of unidentified waveforms, especially performed better performance in very shallow water (0–3 m) and deep water (>11 m). What’s more, the improved quadrilateral algorithm showed the best performance (the least RMSE (power)) in fitting the return waveforms, and had consistent fitting goodness for all different water depths.
- (3)
- The mathematical approximation algorithms mainly depend on the step of cost function optimization, which may generate abnormal values or run into local minima. Moreover, the diffuse attenuation coefficient, bottom reflectance, noise level, and water depth play important roles in the RMSE of the bathymetry estimation. The performance of the algorithms is only slightly affected by the roughness of the water surface and scan angle, but it is greatly impacted in very shallow water. Nevertheless, the algorithms perform relatively well under certain conditions when having smaller diffuse attenuation coefficients, higher bottom reflectance, lower noise levels, and shallower water. Therefore, the choice of algorithm not only depends on the performance of the algorithm, but also depends on the actual application.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Farr, H.K. Multibeam bathymetric sonar: Sea beam and hydro chart. Mar. Geodesy 1980, 4, 77–93. [Google Scholar] [CrossRef]
- Feurer, D.; Bailly, J.-S.; Puech, C.; Le Coarer, Y.; Viau, A.A. Very-high-resolution mapping of river-immersed topography by remote sensing. Prog. Phys. Geogr. 2008, 32, 403–419. [Google Scholar] [CrossRef]
- Westaway, R.M.; Lane, S.N.; Hicks, D.M. Remote sensing of clear-water, shallow, gravel-bed rivers using digital photogrammetry. Photogramm. Eng. Remote Sens. 2001, 67, 1271–1282. [Google Scholar]
- Duchesne, M.J.; Bellefleur, G.; Galbraith, M.; Kolesar, R.; Kuzmiski, R. Strategies for waveform processing in sparker data. Mar. Geophys. Res. 2007, 28, 153–164. [Google Scholar] [CrossRef]
- Calkoen, C.; Hesselmans, G.; Wensink, G.; Vogelzang, J. The bathymetry assessment system: Efficient depth mapping in shallow seas using radar images. Int. J. Remote Sens. 2001, 22, 2973–2998. [Google Scholar] [CrossRef]
- Lee, Z.; Carder, K.L.; Mobley, C.D.; Steward, R.G.; Patch, J.S. Hyperspectral remote sensing for shallow waters. 2. Deriving bottom depths and water properties by optimization. Appl. Opt. 1999, 38, 3831–3843. [Google Scholar] [CrossRef] [PubMed]
- Billard, B.; Abbot, R.H.; Penny, M.F. Airborne estimation of sea turbidity parameters from the WRELADS laser airborne depth sounder. Appl. Opt. 1986, 25, 2080–2088. [Google Scholar] [CrossRef] [PubMed]
- Smart, J.H.; Kang, H.K.K. Comparisons between in-situ and remote sensing estimates of diffuse attenuation profiles. Proc. SPIE 1996, 2964. [Google Scholar] [CrossRef]
- Guenther, G.C. Airborne lidar bathymetry. In Digital Elevation Model Technologies and Applications: The Dem Users Manual; Maune, D., Ed.; ASPRS: Bethesda, MD, USA, 2007; pp. 237–306. [Google Scholar]
- Yang, B.; Huang, R.; Li, J.; Tian, M.; Dai, W.; Zhong, R. Automated reconstruction of building lods from airborne lidar point clouds using an improved morphological scale space. Remote Sensing 2016, 9, 14. [Google Scholar] [CrossRef]
- Hickman, G.D.; Hogg, J.E. Application of an airborne pulsed laser for near shore bathymetric measurements. Remote Sens. Environ. 1969, 1, 47–58. [Google Scholar] [CrossRef]
- Banic, J.; Sizgoric, S.; O’Neil, R. Scanning lidar bathymeter for water depth measurement. In Proceedings of the SPIE Laser Radar Technology and Applications, Quebec, Canada, 3–5 June 1986; pp. 187–195. [Google Scholar]
- Feygels, V.; Park, J.Y.; Tuell, G. Predicted bathymetric lidar performance of coastal zone mapping and imaging lidar (CZMIL). Proc. SPIE 2010, 7695, 769511. [Google Scholar]
- Saylam, K.; Brown, R.A.; Hupp, J.R. Assessment of depth and turbidity with airborne Lidar bathymetry and multiband satellite imagery in shallow water bodies of the Alaskan North Slope. Int. J. Appl. Earth Obs. Geoinf. 2017, 58, 191–200. [Google Scholar] [CrossRef]
- Wagner, W.; Ullrich, A.; Melzer, T.; Briese, C.; Kraus, K. From single-pulse to full-waveform airborne laser scanners: Potential and practical challenges. Int. Arch. Photogramm. Remote Sens. 2004, 35, 201–206. [Google Scholar]
- Bretar, F.; Chauve, A.; Mallet, C.; Jutzi, B. Managing full waveform lidar data: A challenging task for the forthcoming years. In Proceedings of the 21st International Society for Photogrammetry and Remote Sensing (ISPRS) Congress, Beijing, China, 3–11 July 2008; pp. 415–420. [Google Scholar]
- Wagner, W.; Roncat, A.; Melzer, T.; Ullrich, A. Waveform analysis techniques in airborne laser scanning. Int. Arch. Photogramm. Remote Sens. 2007, 36, 413–418. [Google Scholar]
- Chauve, A.; Mallet, C.; Bretar, F.; Durrieu, S.; Deseilligny, M.P.; Puech, W. Processing full-waveform lidar data: Modelling raw signals. In Proceedings of the International Society for Photogrammetry and Remote Sensing (ISPRS) Workshop on Laser Scanning 2007 and SilviLaser 2007, Espoo, Finland, 12–14 September 2007; pp. 102–107. [Google Scholar]
- Abdallah, H.; Bailly, J.S.; Baghdadi, N.N.; Saint-Geours, N.; Fabre, F. Potential of space-borne lidar sensors for global bathymetry in coastal and inland waters. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 202–216. [Google Scholar] [CrossRef]
- Abady, L.; Bailly, J.-S.; Baghdadi, N.; Pastol, Y.; Abdallah, H. Assessment of quadrilateral fitting of the water column contribution in lidar waveforms on bathymetry estimates. IEEE Geosci. Remote Sens. Lett. 2014, 11, 813–817. [Google Scholar] [CrossRef]
- Shen, X.; Li, Q.Q.; Wu, G.; Zhu, J. Decomposition of lidar waveforms by b-spline-based modeling. ISPRS J. Photogramm. Remote Sens. 2017, 128, 182–191. [Google Scholar] [CrossRef]
- Johnstone, I.M.; Kerkyacharian, G.; Picard, D.; Raimondo, M. Wavelet deconvolution in a periodic setting. J. R. Stat. Soc. Ser. B Stat. Methodol. 2004, 66, 547–573. [Google Scholar] [CrossRef]
- Jutzi, B.; Stilla, U. Range determination with waveform recording laser systems using a wiener filter. ISPRS J. Photogramm. Remote Sens. 2006, 61, 95–107. [Google Scholar] [CrossRef]
- Wu, J.; van Aardt, J.; Asner, G.P. A comparison of signal deconvolution algorithms based on small-footprint lidar waveform simulation. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2402–2414. [Google Scholar] [CrossRef]
- Parrish, C.E.; Jeong, I.; Nowak, R.D.; Smith, R.B. Empirical comparison of full-waveform lidar algorithms: Range extraction and discrimination performance. Photogramm. Eng. Remote Sens. 2011, 77, 824–838. [Google Scholar] [CrossRef]
- Wang, C.; Li, Q.; Liu, Y.; Wu, G.; Liu, P.; Ding, X. A comparison of waveform processing algorithms for single-wavelength lidar bathymetry. ISPRS J. Photogramm. Remote Sens. 2015, 101, 22–35. [Google Scholar] [CrossRef]
- Pan, Z.; Glennie, C.; Hartzell, P.; Fernandez-Diaz, J.; Legleiter, C.; Overstreet, B. Performance assessment of high resolution airborne full waveform lidar for shallow river bathymetry. Remote Sens. 2015, 7, 5133–5159. [Google Scholar] [CrossRef]
- Chehata, N.; Guo, L.; Mallet, C. Airborne lidar feature selection for urban classification using random forests. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2009, 39, 207–212. [Google Scholar]
- Seshamani, R.; Alex, T.K.; Jain, Y.K. An airborne sensor for primary productivity and related parameters of coastal waters and large water bodies. Int. J. Remote Sens. 1994, 15, 1101–1108. [Google Scholar] [CrossRef]
- Park, J.Y.; Ramnath, V.; Tuell, G. Using lidar waveforms to detect environmental hazards through visualization of the water column. In Proceedings of the OCEANS 2014, Taipei, Taiwan, 7–10 April 2014; pp. 1–5. [Google Scholar]
- Richter, K.; Maas, H.G.; Westfeld, P.; Weiß, R. An approach to determining turbidity and correcting for signal attenuation in airborne lidar bathymetry. J. Photogramm. Remote Sens. Geoinf. Sci. 2017, 85, 31–40. [Google Scholar] [CrossRef]
- Long, B.; Cottin, A.; Collin, A. What Optech’s bathymetric LIDAR sees underwater. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007; pp. 3170–3173. [Google Scholar]
- Marquardt, D.W. An algorithm for least square estimation of non-linear parameters. J. Soc. Ind. Appl. Math. 1963, 11, 431–441. [Google Scholar] [CrossRef]
- Guenther, G.C. Airborne Laser Hydrography: System Design and Performance Factors; National Ocean Service 1; National Oceanic and Atmospheric Administration: Rockville, MD, USA, 1985.
- McLean, J.W. Modeling of ocean wave effects for lidar remote sensing. In Proceedings of the Technical Symposium on Optics, Electro-Optics, and Sensors, Orlando, FL, USA, 16–20 April 1990; pp. 480–491. [Google Scholar]
- Feigels, V.I. Lidars for oceanological research: Criteria for comparison, main limitations, perspectives. Proc. SPIE 1992, 1750, 473–484. [Google Scholar]
- Abdallah, H.; Baghdadi, N.; Bailly, J.S.; Pastol, Y. Wa-lid: A new lidar simulator for waters. IEEE Geosci. Remote Sens. Lett. 2012, 9, 744–748. [Google Scholar] [CrossRef]
- Cook, R.L.; Torrance, K.E. A reflectance model for computer graphics. ACM Trans. Graphics (TOG) 1982, 1, 7–24. [Google Scholar] [CrossRef]
- Guenther, G.C.; Mesick, H.C. Analysis of airborne laser hydrography waveforms. In Proceedings of the Technical Symposium on Optics, Electro-Optics, and Sensors, Orlando, FL, USA, 4–8 April 1988; pp. 232–241. [Google Scholar]
- Feygels, V.I.; Park, J.Y.; Wozencraft, J.; Aitken, J.; Macon, C.; Mathur, A.; Payment, A.; Ramnath, V. Czmil (coastal zone mapping and imaging lidar): From first flights to first mission through system validation. In Proceedings of the SPIE Defense, Security, and Sensing, Baltimore, MD, USA, 29 April–3 May 2013; pp. 1–15. [Google Scholar]
- Hofton, M.A.; Minster, J.B.; Blair, J.B. Decomposition of laser altimeter waveforms. IEEE Trans. Geosci. Remote Sens. 2000, 38, 1989–1996. [Google Scholar] [CrossRef]
- Wagner, W.; Ullrich, A.; Ducic, V.; Melzer, T.; Studnicka, N. Gaussian decomposition and calibration of a novel small-footprint full-waveform digitising airborne laser scanner. ISPRS J. Photogramm. Remote Sens. 2006, 60, 100–112. [Google Scholar] [CrossRef]
- Allouis, T.; Bailly, J.-S.; Pastol, Y.; Le Roux, C. Comparison of lidar waveform processing methods for very shallow water bathymetry using Raman, near-infrared and green signals. Earth Surf. Process. Landf. 2010, 35, 640–650. [Google Scholar] [CrossRef]
- Bouhdaoui, A.; Bailly, J.S.; Baghdadi, N.; Abady, L. Modeling the water bottom geometry effect on peak time shifting in lidar bathymetric waveforms. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1285–1289. [Google Scholar] [CrossRef]
- Figueiredo, M.A.; Nowak, R.D. An EM algorithm for wavelet-based image restoration. IEEE Trans. Image Process. 2003, 12, 906–916. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fixed Parameters | Values | Floating Parameters | Values |
|---|---|---|---|
| λ(nm) | 532 | Kd (m−1) | 0.01–0.1 |
| T0 (ns) | 7 | Rb | 0.01–0.2 |
| PT (W) | 5.0 × 10−4 | r | 0.1–0.5 |
| H (m) | 200 | θ (°) | 0–25 |
| Β (m−1sr−1) | 4.0 × 10−4 | D (m) | 0–15 |
| F | 1 | PSNR | 10–110 |
| Τ (ns) | 0 | ||
| v (m/s) | 3.0 × 108 | ||
| η | 0.01 |
| Parameter | Specification |
|---|---|
| Flight height (AGL, m) | 300–600 |
| Laser wavelength (nm) | 532 |
| Power | 28 V; 900 W; 35 A (peak) |
| Pulse width (FWHM in ns) | 8.3 |
| Digitization frequency (GHz) | 1 |
| Resolution of full waveform (bits) | 12 |
| Beam divergence (mrad) | 1 |
| Pulse repetition rate (KHz) | 33, 50, 70 |
| Scan rate (Hz) | 0~70 |
| Scan half-angle | 0~±25° |
| Point density (pts/m2) | 4 |
| Footprint on water surface (cm) | 30~60 |
| Depth range (m) | 0~ > 10 (for Kd < 0.1 m−1) |
| Algorithm | Sr (%) | Fr (%) | RMSED (m) | Bias (m) | STD (m) | R2 | Tc (s) |
|---|---|---|---|---|---|---|---|
| TF | 73.25 | 8.6362 | 2.6377 | −0.8299 | 2.5037 | 0.9733 | 1804.1613 |
| QF | 75.17 | 6.1840 | 2.4337 | −0.6530 | 2.3444 | 0.9786 | 2350.6966 |
| IQF | 75.68 | 5.6471 | 2.2910 | −0.5607 | 2.2213 | 0.9837 | 4627.2592 |
| TF | QF | IQF | |
|---|---|---|---|
| Bias (m) | −0.970 | −0.773 | −0.686 |
| STD (m) | 2.107 | 1.924 | 1.859 |
| PSNR | RMSE (m) | RMSE (m) | RMSE (m) |
|---|---|---|---|
| TF | QF | IQF | |
| 0–40 | 5.601 | 5.551 | 5.545 |
| 40–80 | 3.358 | 3.225 | 3.213 |
| 80–120 | 2.684 | 2.509 | 2.483 |
| Algorithms | TF | QF | IQF |
|---|---|---|---|
| Averaged RMSE (power) | 7.586 | 5.158 | 2.775 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, K.; Li, Q.; Zhu, J.; Wang, C.; Guan, M.; Chen, Z.; Yang, C.; Cui, Y.; Liao, J. An Improved Quadrilateral Fitting Algorithm for the Water Column Contribution in Airborne Bathymetric Lidar Waveforms. Sensors 2018, 18, 552. https://doi.org/10.3390/s18020552
Ding K, Li Q, Zhu J, Wang C, Guan M, Chen Z, Yang C, Cui Y, Liao J. An Improved Quadrilateral Fitting Algorithm for the Water Column Contribution in Airborne Bathymetric Lidar Waveforms. Sensors. 2018; 18(2):552. https://doi.org/10.3390/s18020552
Chicago/Turabian StyleDing, Kai, Qingquan Li, Jiasong Zhu, Chisheng Wang, Minglei Guan, Zhipeng Chen, Chao Yang, Yang Cui, and Jianghai Liao. 2018. "An Improved Quadrilateral Fitting Algorithm for the Water Column Contribution in Airborne Bathymetric Lidar Waveforms" Sensors 18, no. 2: 552. https://doi.org/10.3390/s18020552
APA StyleDing, K., Li, Q., Zhu, J., Wang, C., Guan, M., Chen, Z., Yang, C., Cui, Y., & Liao, J. (2018). An Improved Quadrilateral Fitting Algorithm for the Water Column Contribution in Airborne Bathymetric Lidar Waveforms. Sensors, 18(2), 552. https://doi.org/10.3390/s18020552