A Novel Loss Recovery and Tracking Scheme for Maneuvering Target in Hybrid WSNs




Abstract
:1. Introduction
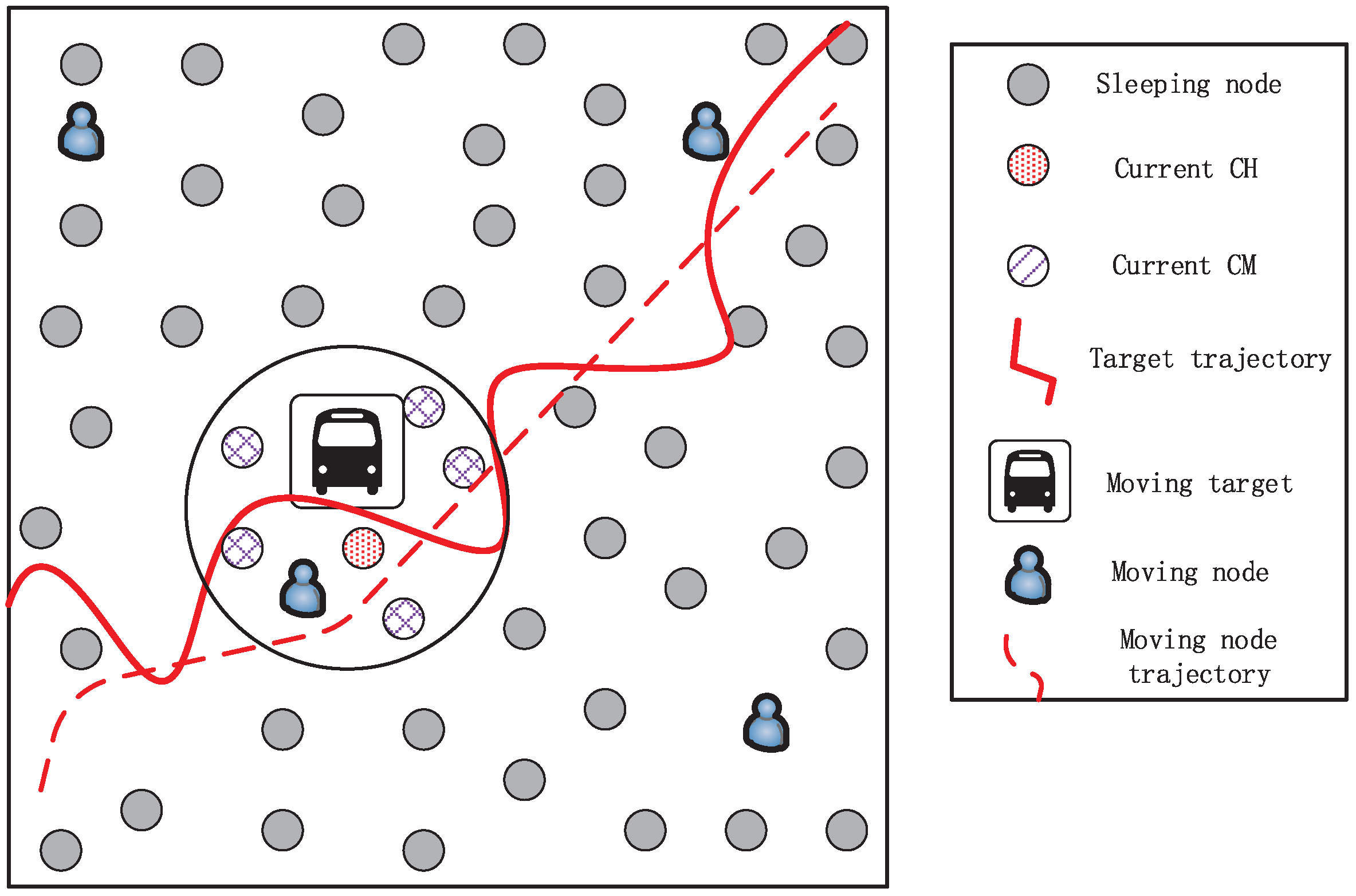
- Propose an effective target tracking scheme in hybrid WSNs where the MNs and the dynamic activated cluster nodes are integrated for cooperation tracking.
- Design a novel loss recovery mechanism for mobile target in hybrid WSNs, which aims to recover the mobile target with fewer active nodes in the cases that the target suddenly changes its speed or direction and the target enters coverage holes in the deployment monitoring area.
- Propose an adaptive UKF (AUKF) algorithm which adaptively adjusts the process noise covariance matrix based on the weighting combination of its current theoretical estimation value and previous data.
2. Problem Formulation and System Models
2.1. Problem Formulation and System Overview
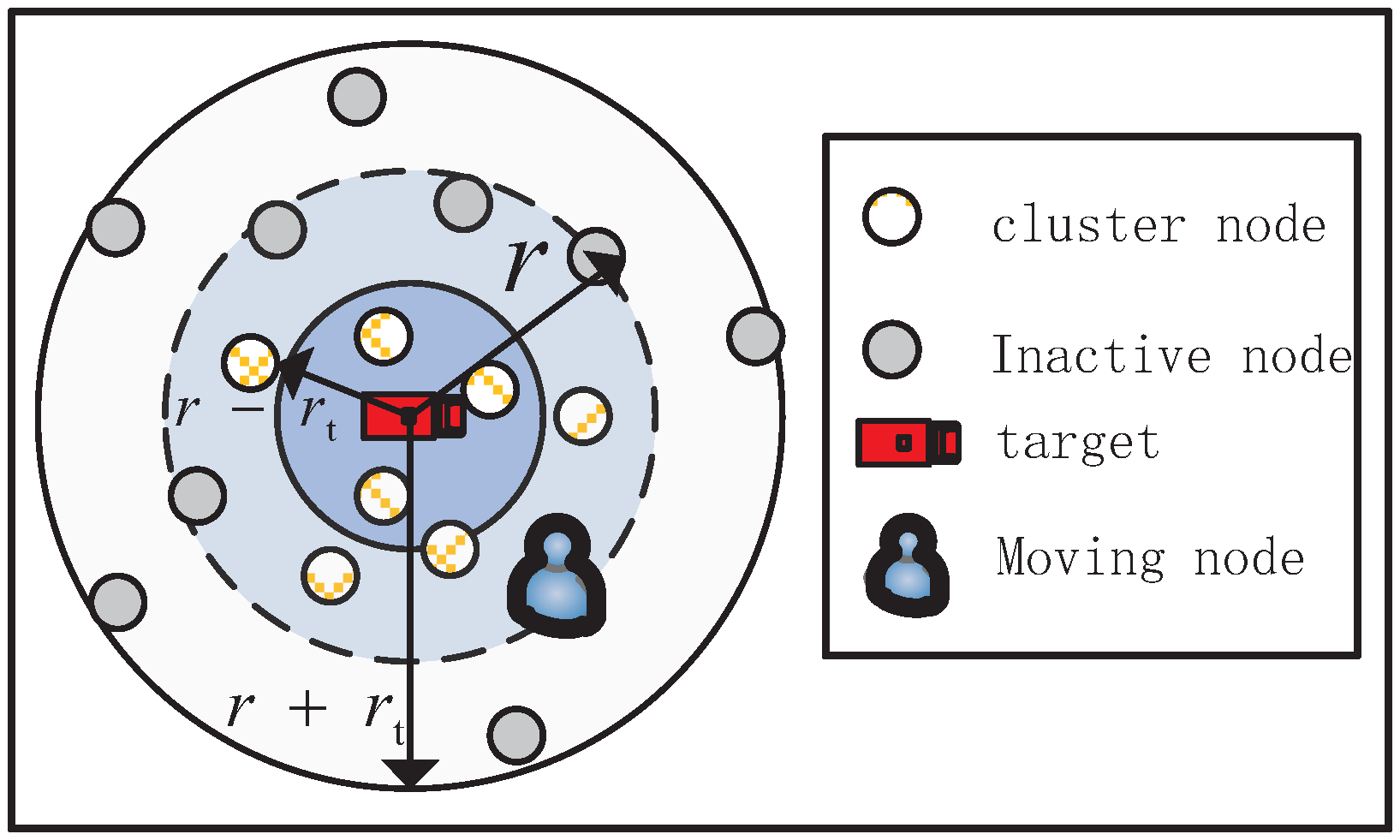
2.2. Event-Detection Model and Tracking-Probability Definition
2.3. Motion and Measurement Models
2.4. Energy Consumption Model
3. Adaptive Unscented Kalman Filter Algorithm for Target Tracking
3.1. Standard Unscented Kalman Filter: A Brief Review
- Compute weights with the initial parameter :where is the dimension of the state vector, } is the unit vector of the jth dimension and when .
- At timestep k, establish symmetric sigma points about the previous state estimation with the last estimation of target state and error covariance matrix :where is the square root of .
- Predict the target state at timestep k and its error covariance matrix :where is the process noise covariance matrix at timestep .
- Establish symmetric sigma points about the state prediction:where is also the square root of .
- Predict the innovation covariance matrix and cross covariance matrix :where is the prediction of measurement and is the measurement noise covariance matrix at timestep k.
- Calculate current Kalman gain and then obtain the estimation of current state and its error covariance matrix using current actual measurement .
3.2. Adaptive Unscented Kalman Filter
| Algorithm 1: The adaptive Unscented Kalman filter (AUKF) algorithm. |
| Input: . |
| 1: Initialization: |
| 2: ; . |
| 3: for do |
| 4: Implement the standard UKF to obtain , , , . |
| 5: Update the : |
| 6: |
| 7: ; |
| 8: Correct state estimations: |
| 9: ; |
| 10: ; |
| 11: ; |
| 12: , . |
| 13: Save the and . |
| 14: end for |
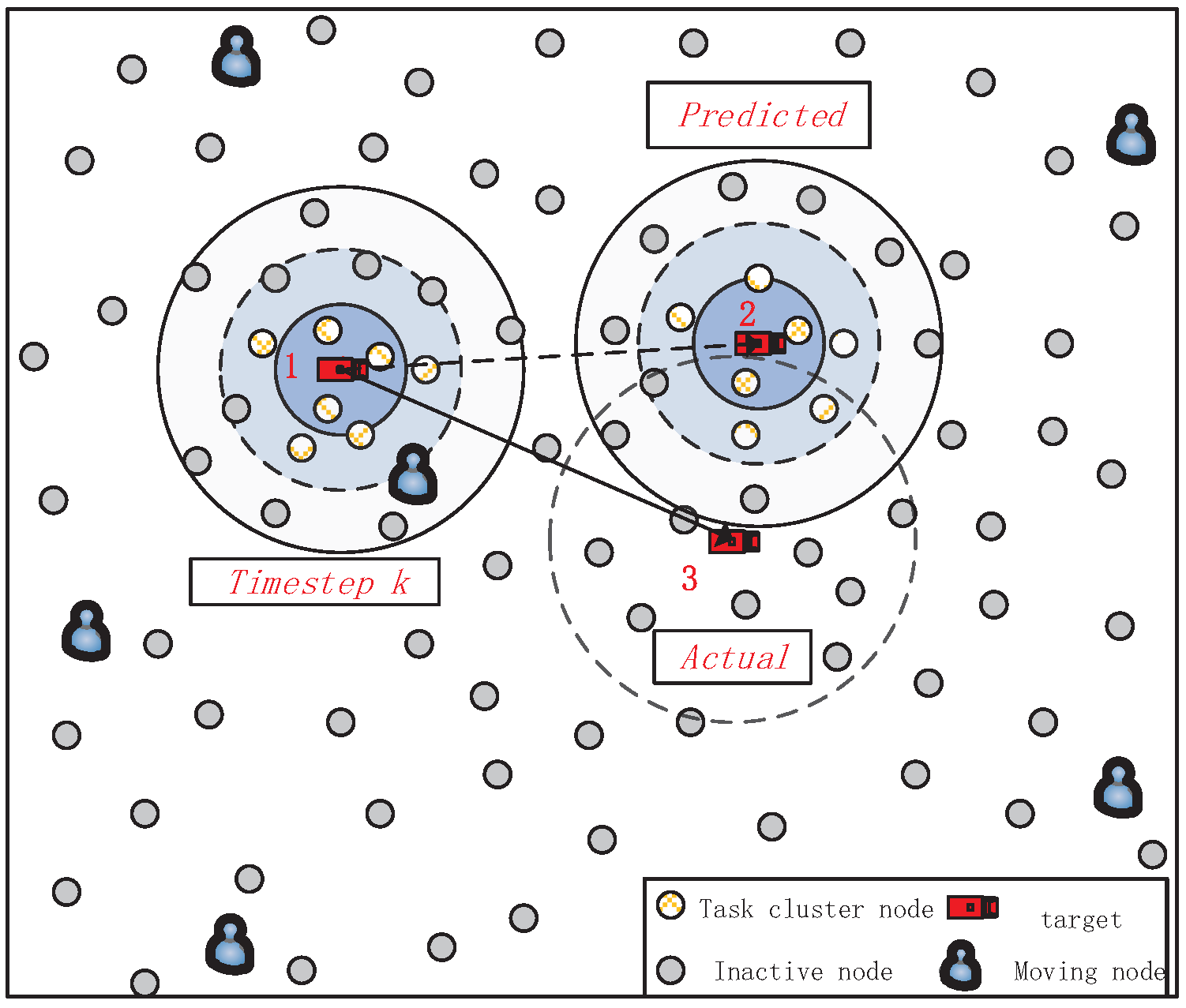
4. Selection of Task Cluster
5. Tracking the Target with Mobile Sensors
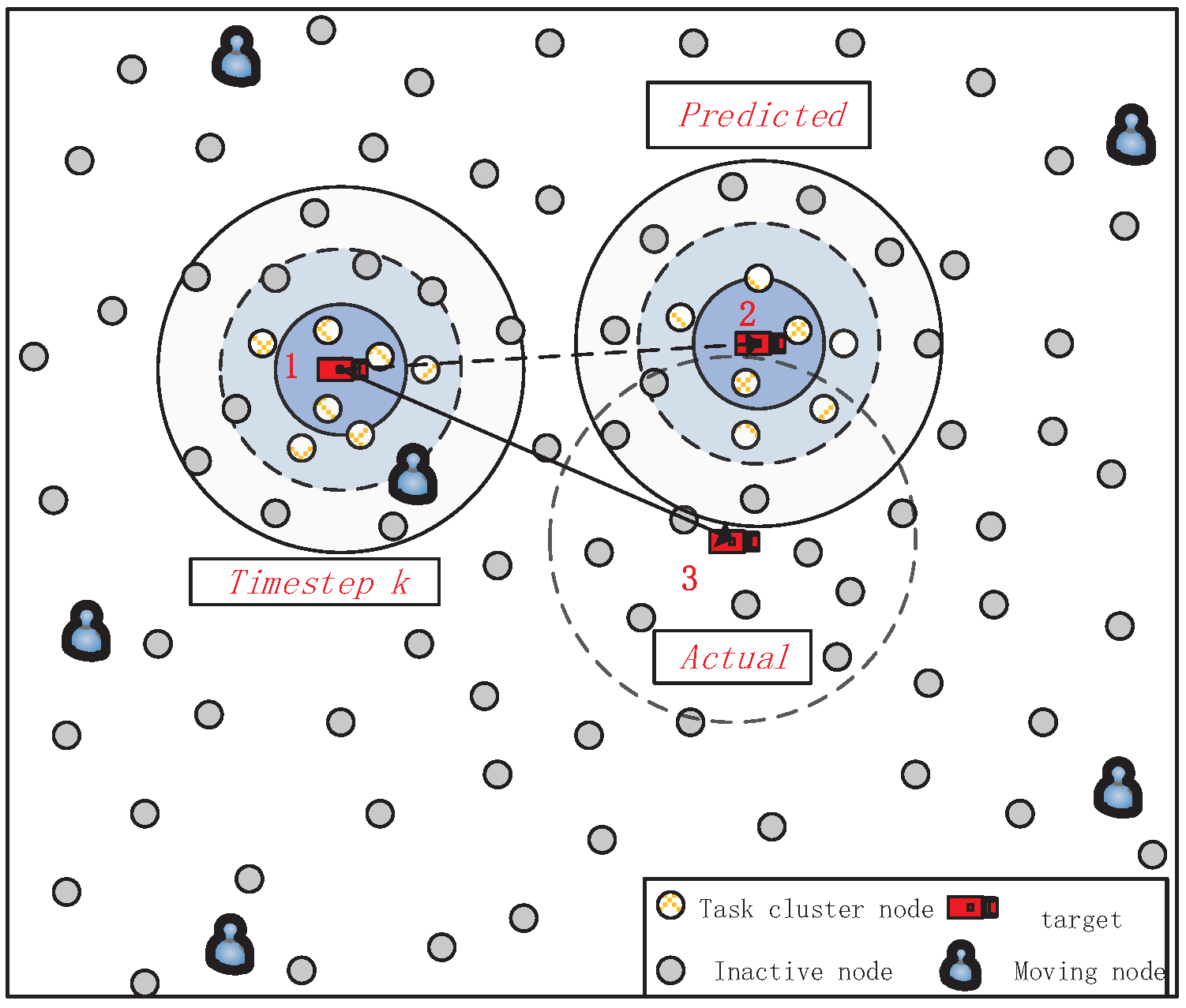
5.1. Description of Tracking Process with Mobile Nodes
- Once the PIR sensors make a positive detection, it will turn on the distance-measuring sensor to achieve the distance-to-target.
- When the preset time interval is up, the node will send a data packet which includes its current measurements and remaining energy information to the CH and the closest MN after a random delayed time with the conflict detect mechanism, CSMA/CA.
- Once sending the data packet successfully, it will shut down its sensors and turn into sleep mode again to save energy until awakened next time.
- After receiving the activated message packet from the last CH, it extracts and saves the previous state information of the target, and then it will also execute the detection task like that in the CM.
- When the preset time interval is up, it begins to receive the data packets from its CMs and the MN. Then, it carries out standard UKF algorithm to fuse different measurements with its own measurements and then obtains current estimations of target state as well as its predictions.
- It extracts the remaining energy information of its neighbour nodes from the data packet coming from the MN and then chooses appropriate cluster nodes and a new CH for next cluster according to the method described in Section 4.
- It sends a data packet which includes current estimations of target state and its predictions to the MN and activates the next cluster nodes.
- After reporting the results to related nodes, it also closes its sensors and puts into sleep state until awakened next time.
- It will approach the predicted position of target at current timestep as soon as possible and then implement the detection task like the cluster node.
- When the preset time interval is up, it sends a data packet including its measurements and the remaining energy information of the neighbour nodes of current CH.
- Once receiving the data packet from the CH, it forwards the current state information of the target to the remote end by some internets (e.g., the cellular network) and also shares the information with other MNs.
- It will select the MN nearest to the predicted position of target as the next mobile sink.
5.2. Analysis of Mobile Nodes in Tracking
- Performance as the mobile sink. As the sinks, node needs to gather information from current cluster head and forward it to a remote end. As shown in Figure 4a, four fixed sinks are involved in the monitor area. If current cluster head closes to one of sinks, it could communicate with the sink directly. When current cluster head is far away the fixed sinks, it has to depend on a relay node to communicate with the closest sink, which brings in a heavy communication burden. While, in this work, the selected MN will service as a mobile sink and keep close to current cluster during a timestep. Hence, current cluster head can directly communicate with the mobile sink without any relay nodes as shown in Figure 4b.
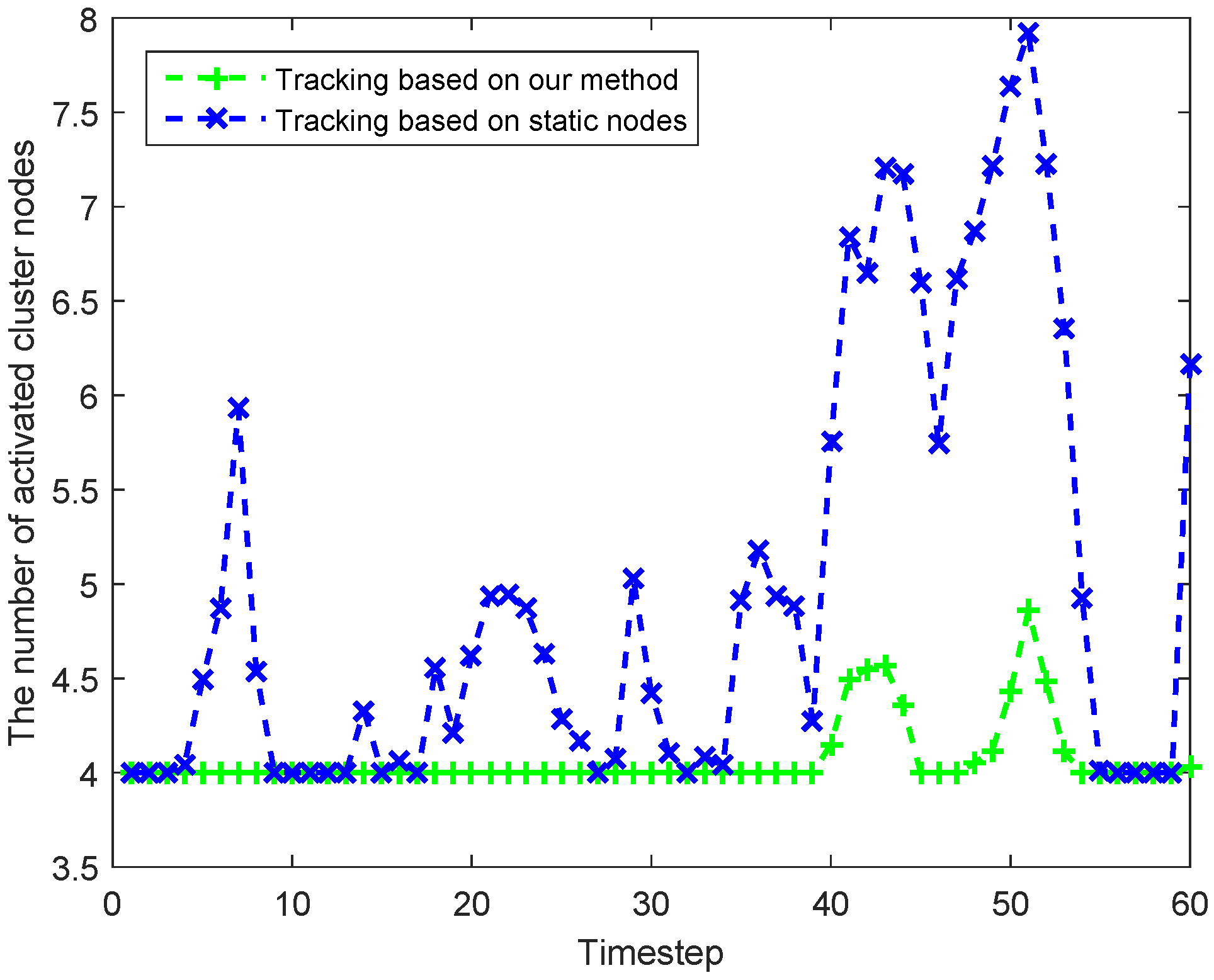
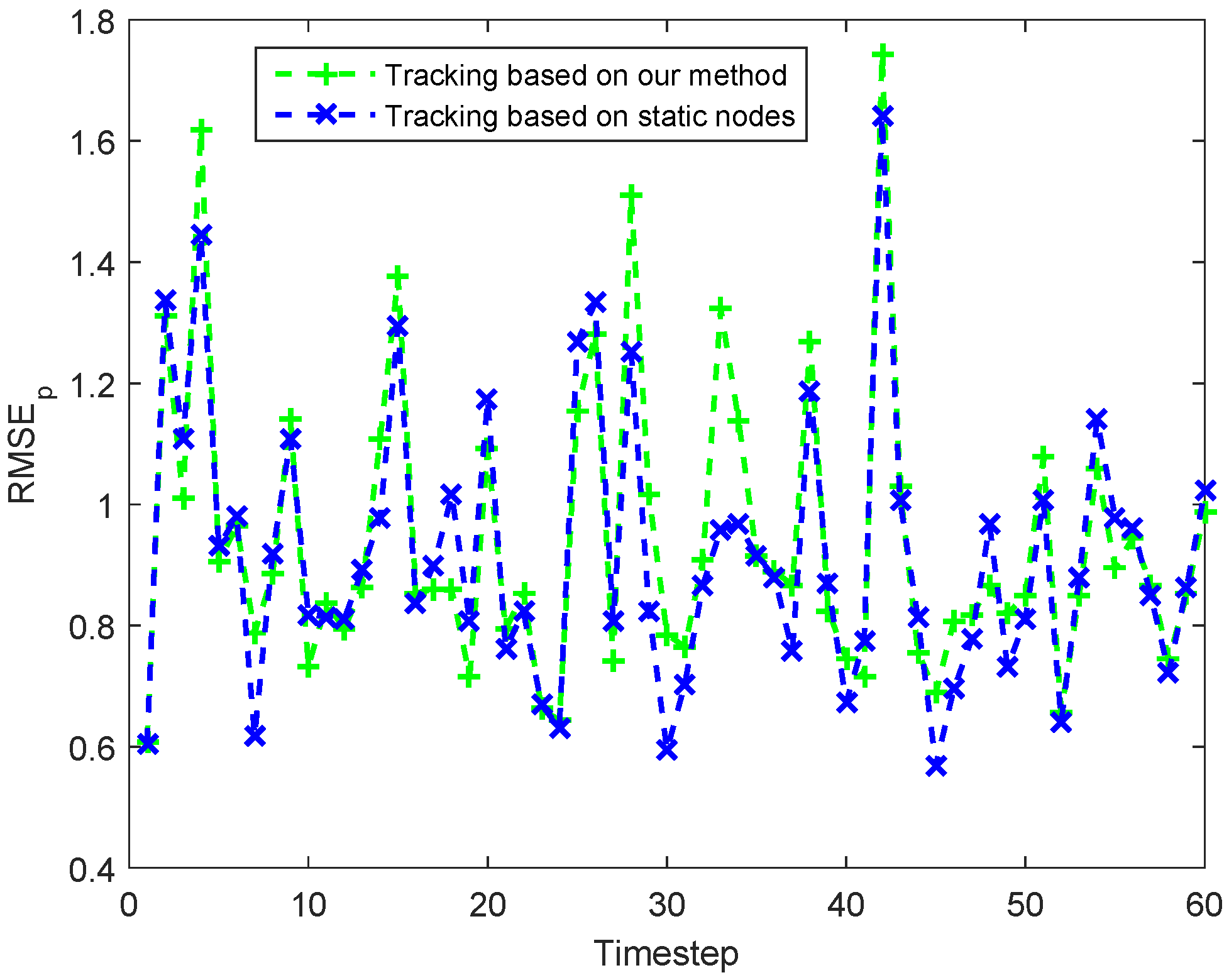
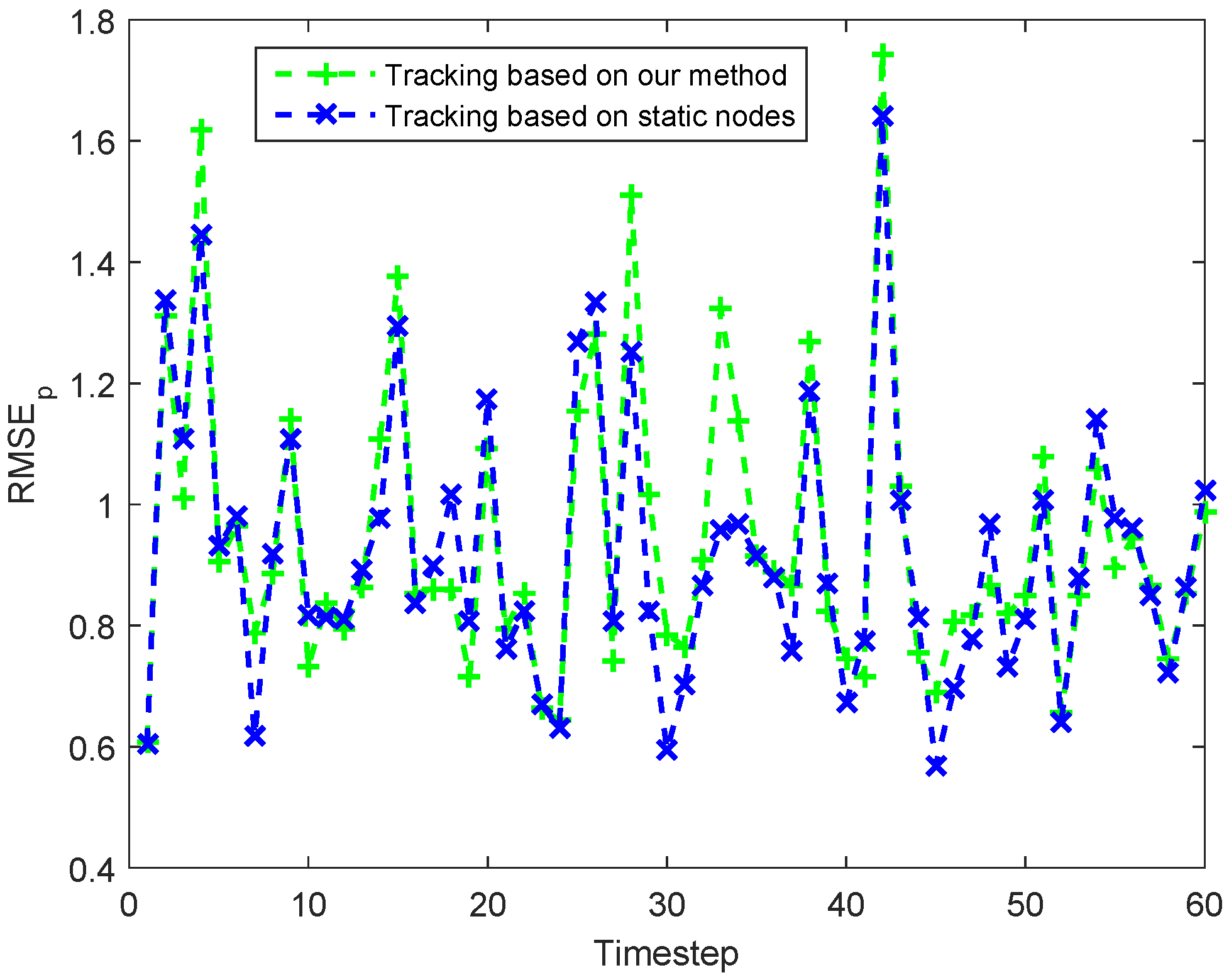
- Performance as the tracking node. To ensure a high tracking accuracy, the tracking scheme should select a task cluster with a tracking-probability. Thus, as shown in Figure 4a, six static nodes are selected as current task nodes to ensure a high tracking-probability. Nevertheless, when a mobile node is involved, only two static nodes are required to ensure a high tracking-probability, which can been seen in Figure 4b. That is because the selected MN will move close to target, improving the detecting probability and saving the energy consumption of static nodes [21].
6. Recovery Mechanism for Target Lost
- Localization errors: As mentioned earlier, only some sensor nodes are awakened to track the target for saving energy. Localization is never perfect no matter what estimation methods (e.g., EKF, UKF or PF) are used. Furthermore, the estimation errors may have a cumulative effect on estimating the target state. Then, an inaccurate estimation of target location may result in prediction errors which can further lead to target loss, since an unsuitable cluster is wakened in advance.
- Communication failures: Sensor nodes may be unable to communicate due to some obstacles, such as trees, stones, and buildings. Moreover, packet loss and delay in response owing to communication breakdown, overload, and environmental factors can also be considered in this case.
- Node failures: Sensor nodes in WSNs have limited battery capacity and unreliable components in order to reduce costs. Thus, node failures may occur due to software or hardware failure, battery discharge, enemy action, etc.
- Abrupt change in target’s speed or direction: The target may change its trajectory or speed suddenly because of the internal or external factors. In this case, the difference between actual and prior prediction position of target becomes so large that the active cluster cannot track the target efficiently.
- Target enters the coverage hole in WSN: The coverage holes exist in the sensor networks due to the uneven deployment of the sensor nodes [15]. The tracking network system may lose the target when it enters the holes where only few nodes could detect the target.
6.1. Declaration of Lost Target
6.2. Target Recovery Method
| Algorithm 2: The target recovery mechanism. |
| Step 1: The MN detects and tracks the target: |
|
| Step 2: The recovery cluster detects the target: |
|
| Step 3: The downstream cluster tracks the target: |
|
7. Simulation and Performance Evaluation
7.1. Simulation Setup
7.2. Tracking Performance under Normal Circumstances
- (1)
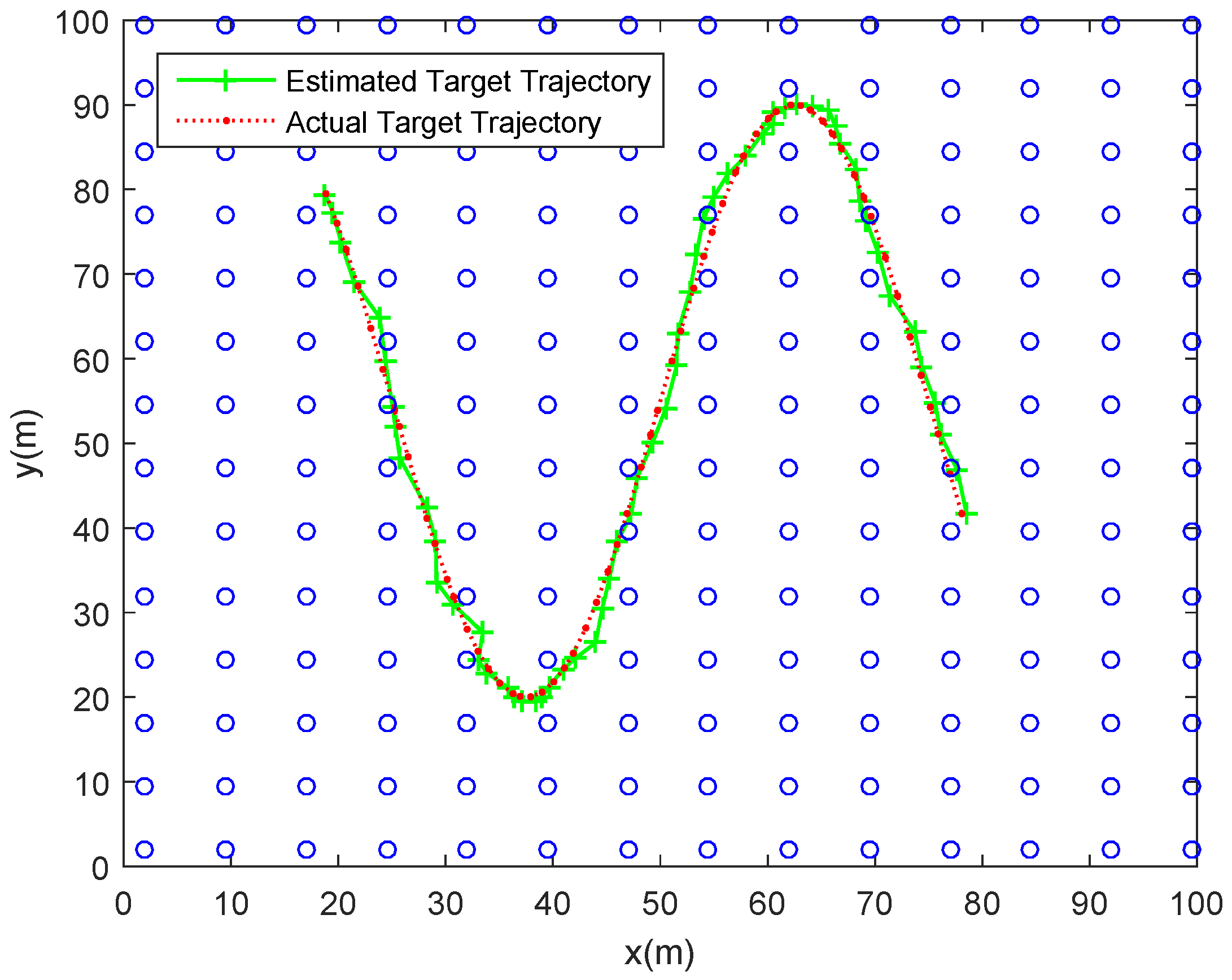
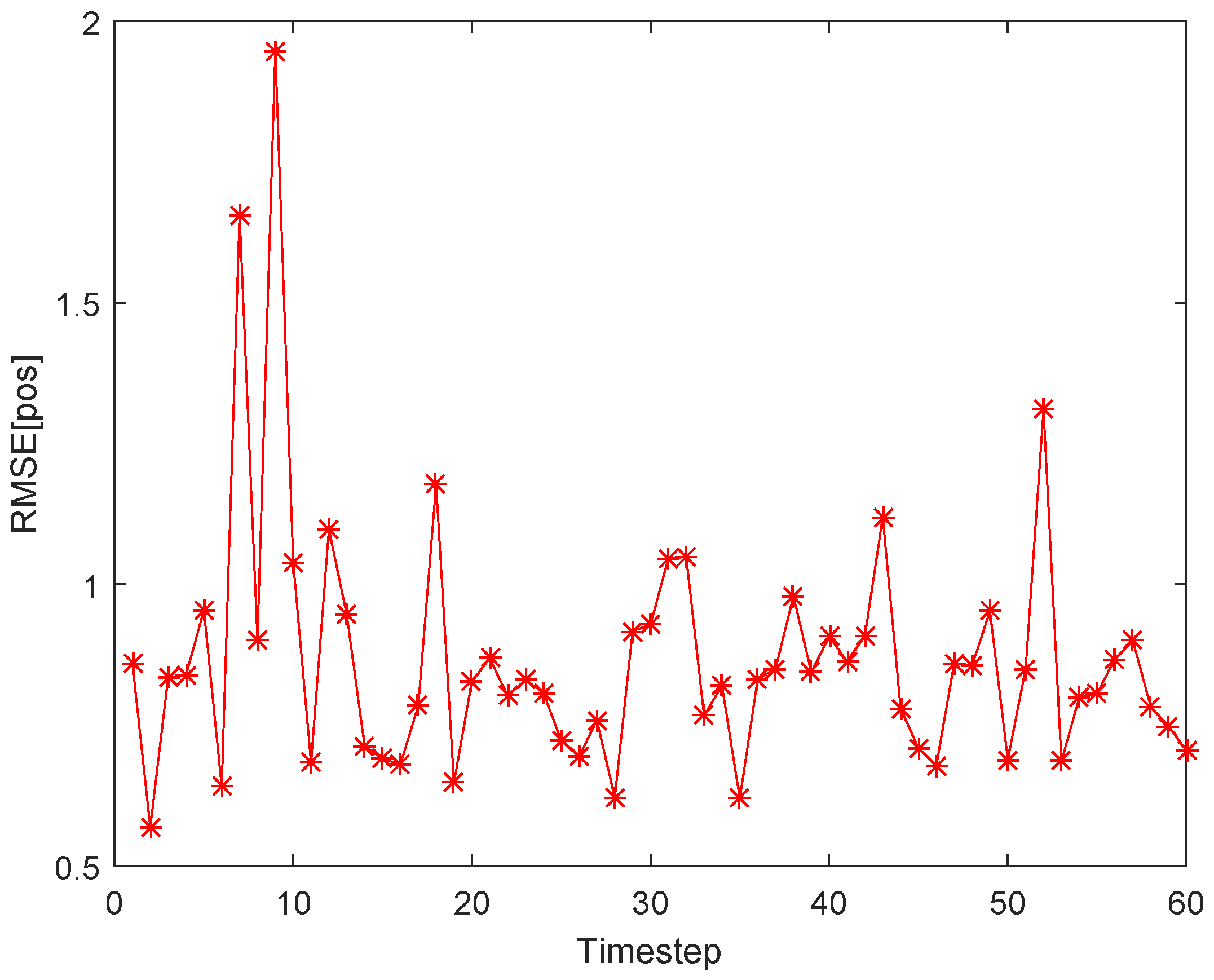
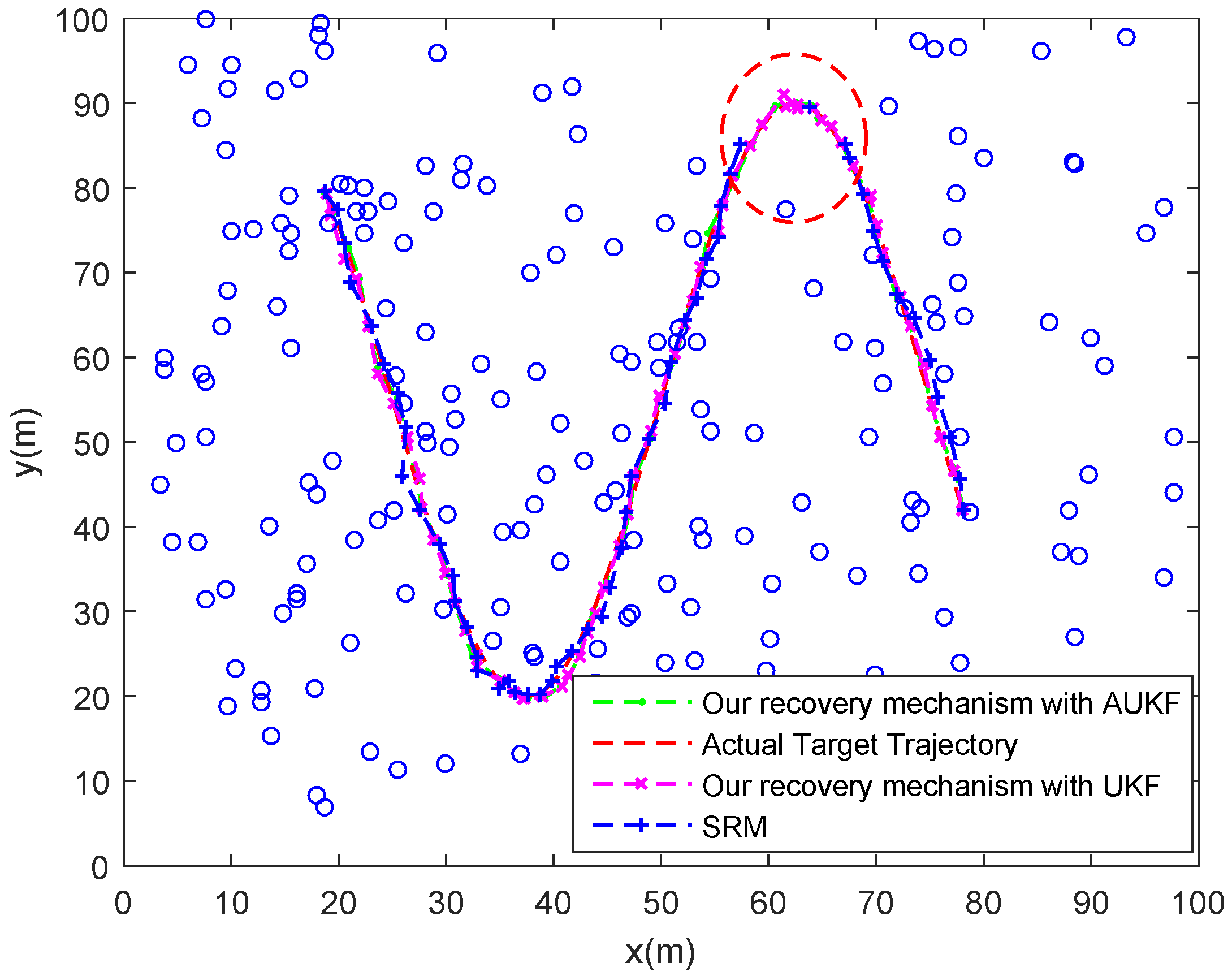
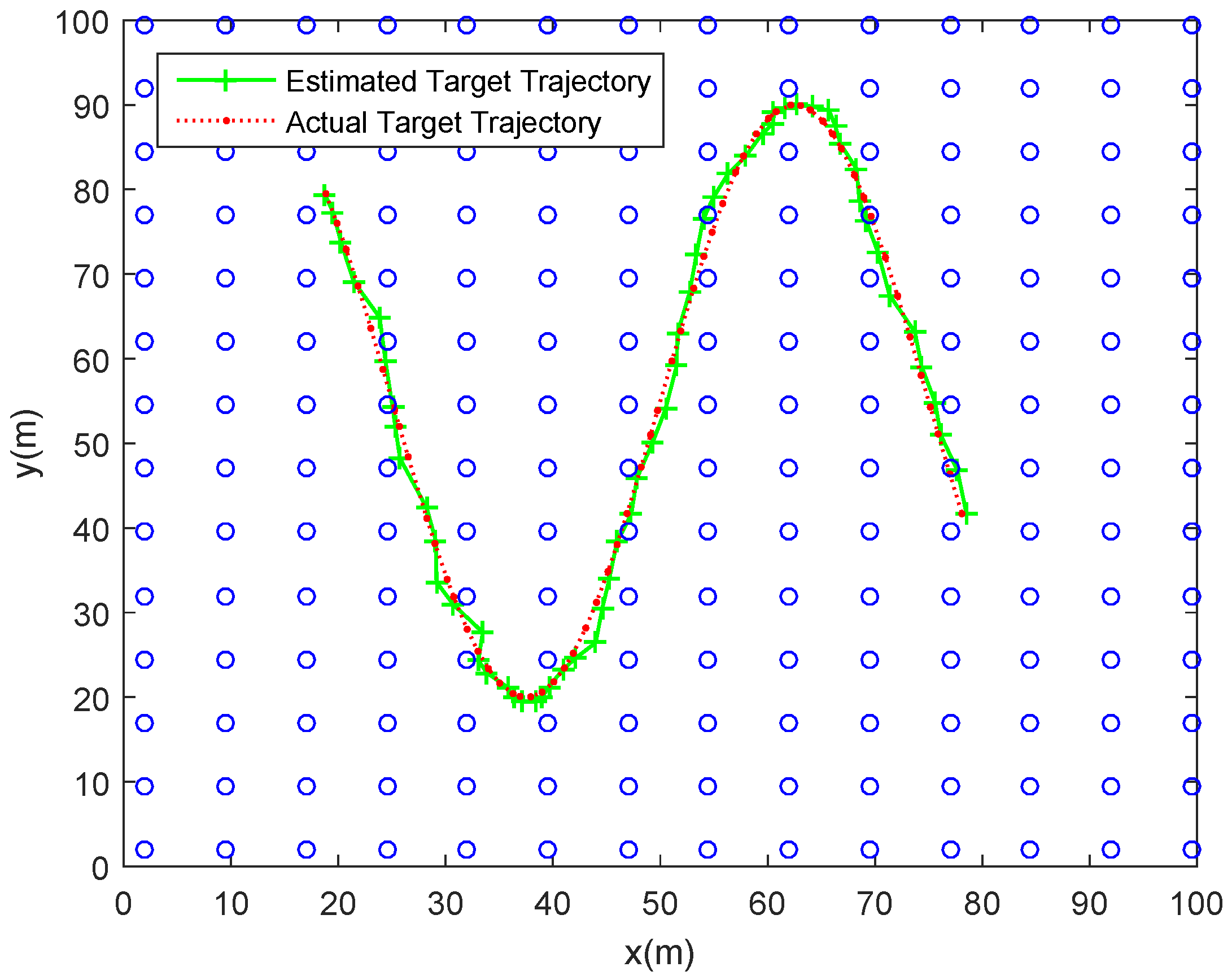
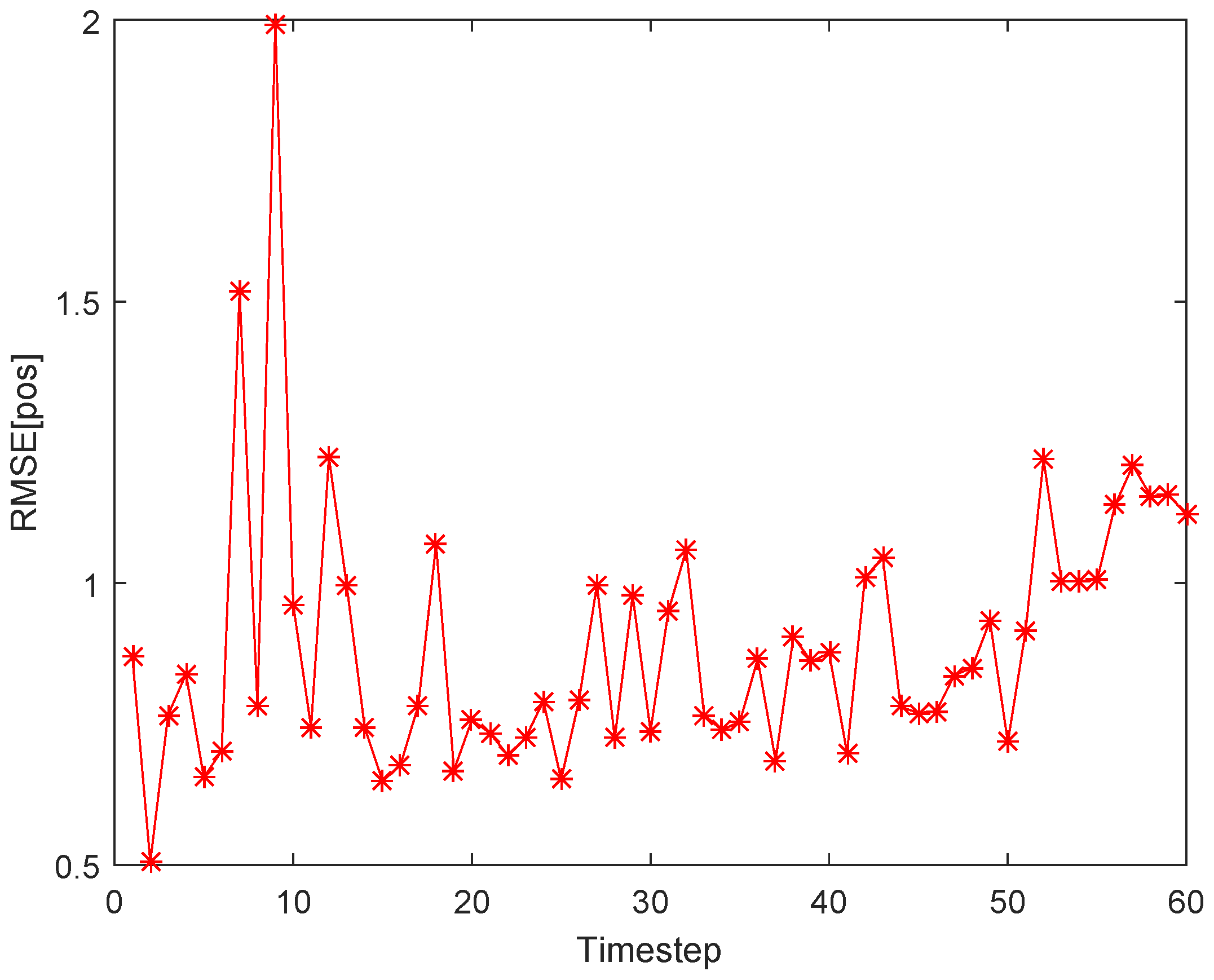
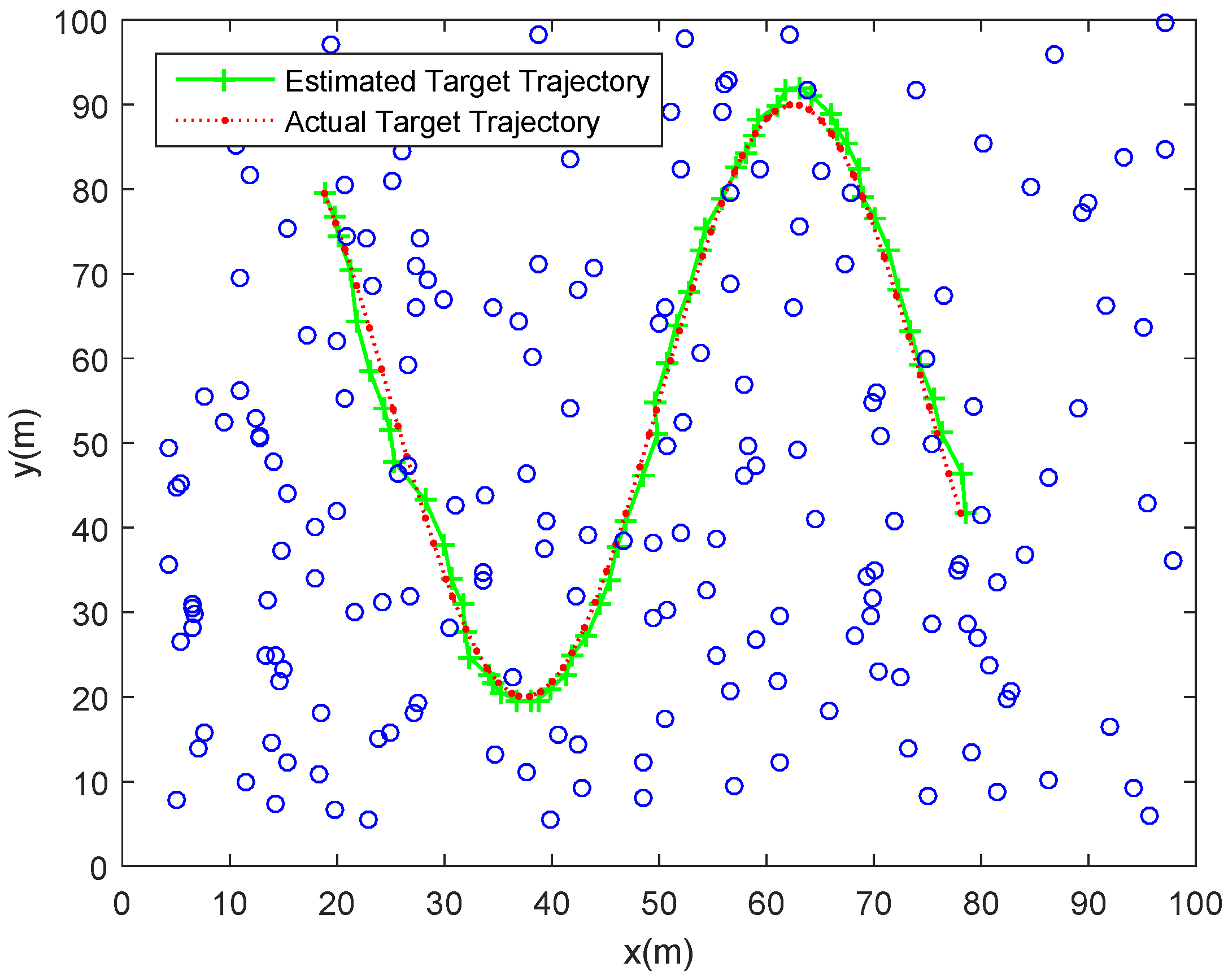
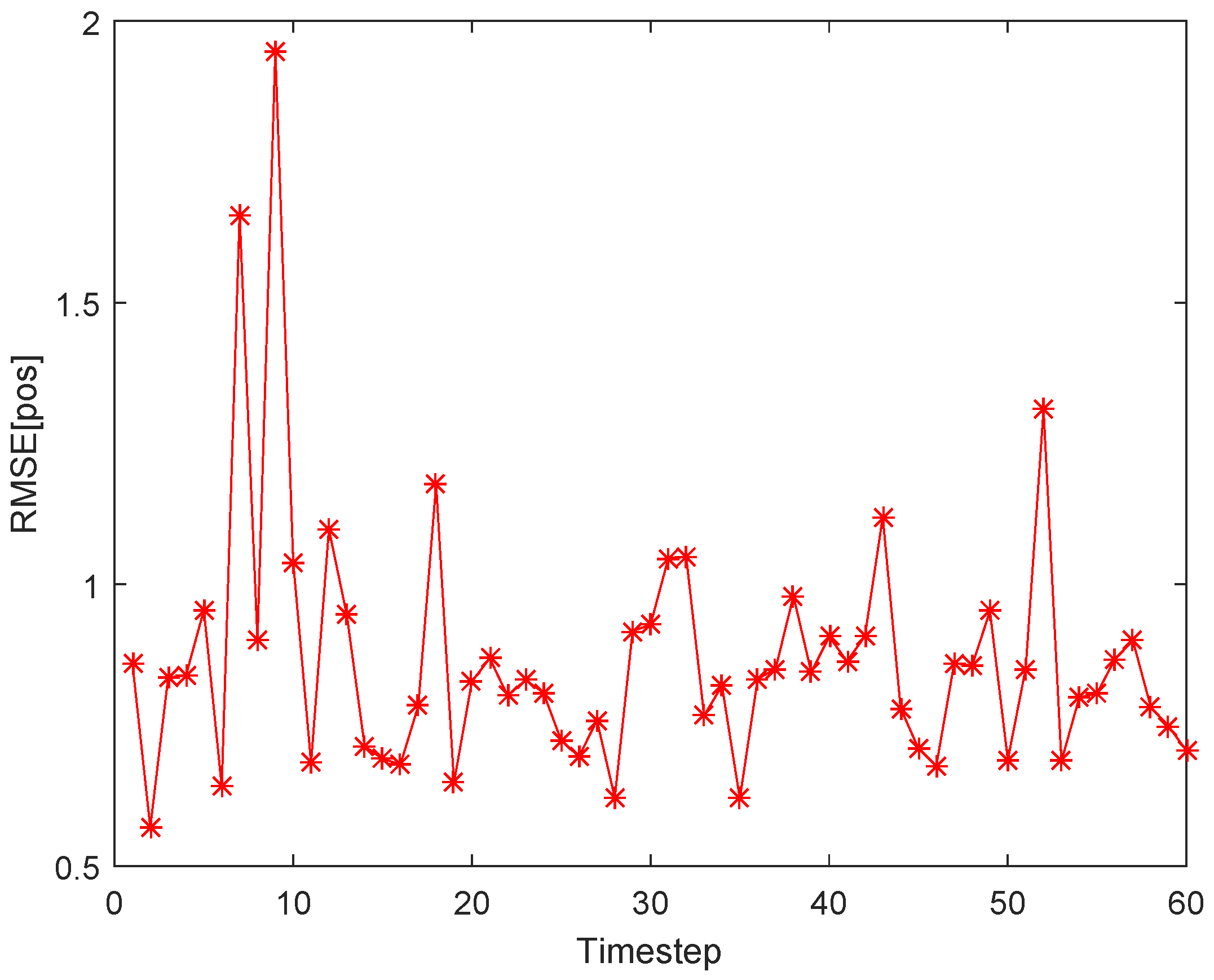
- Tracking errors. As shown with the red dotted line in Figure 6, a maneuvering target move along a curve trajectory in the monitored area which is assumed to be covered by uniformly distributed SNs. One of the estimated target trajectories is displayed with green solid line. The tracking errors shown in Figure 7 is indicated by the RMSE in position () at each timestep. The minimum and maximum are separately 0.5046 m and 1.9921 m, and the is 0.8920 m. As for the tracking errors in randomly distributed sensor networks, Figure 8 and Figure 9 show, respectively, one of the estimated target trajectories and tracking errors. The minimum and maximum are respectively 0.5684 m and 1.9463 m, and the is 0.8670 m.
- (2)
- Total energy consumption. The amount of energy consumed by the whole network to monitor the mobile target is another important metric to measure the practicality of our scheme. The averaged energy consumption of the proposed tracking scheme in one tracking action used in the randomly distributed sensor network is 2.4623 J, higher than that in the uniformly distributed sensor network a bit (2.3449 J). The reason for this is that the proposed method may activate more SNs due to the uneven distribution in the randomly distributed sensor network.
7.3. Performance Analysis of Mobile Nodes in Tracking the Target
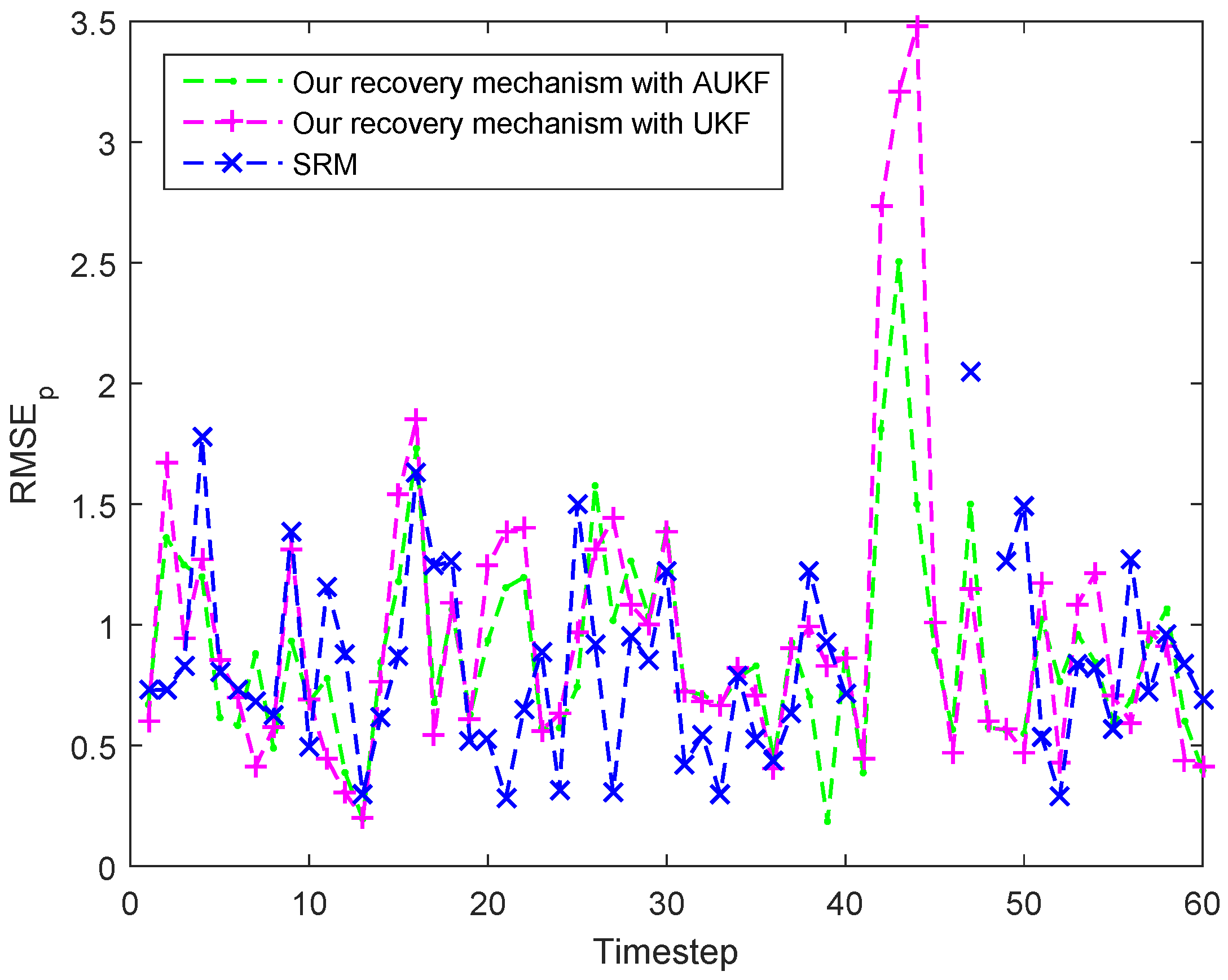
7.4. Recovery Performance When Target Is Lost
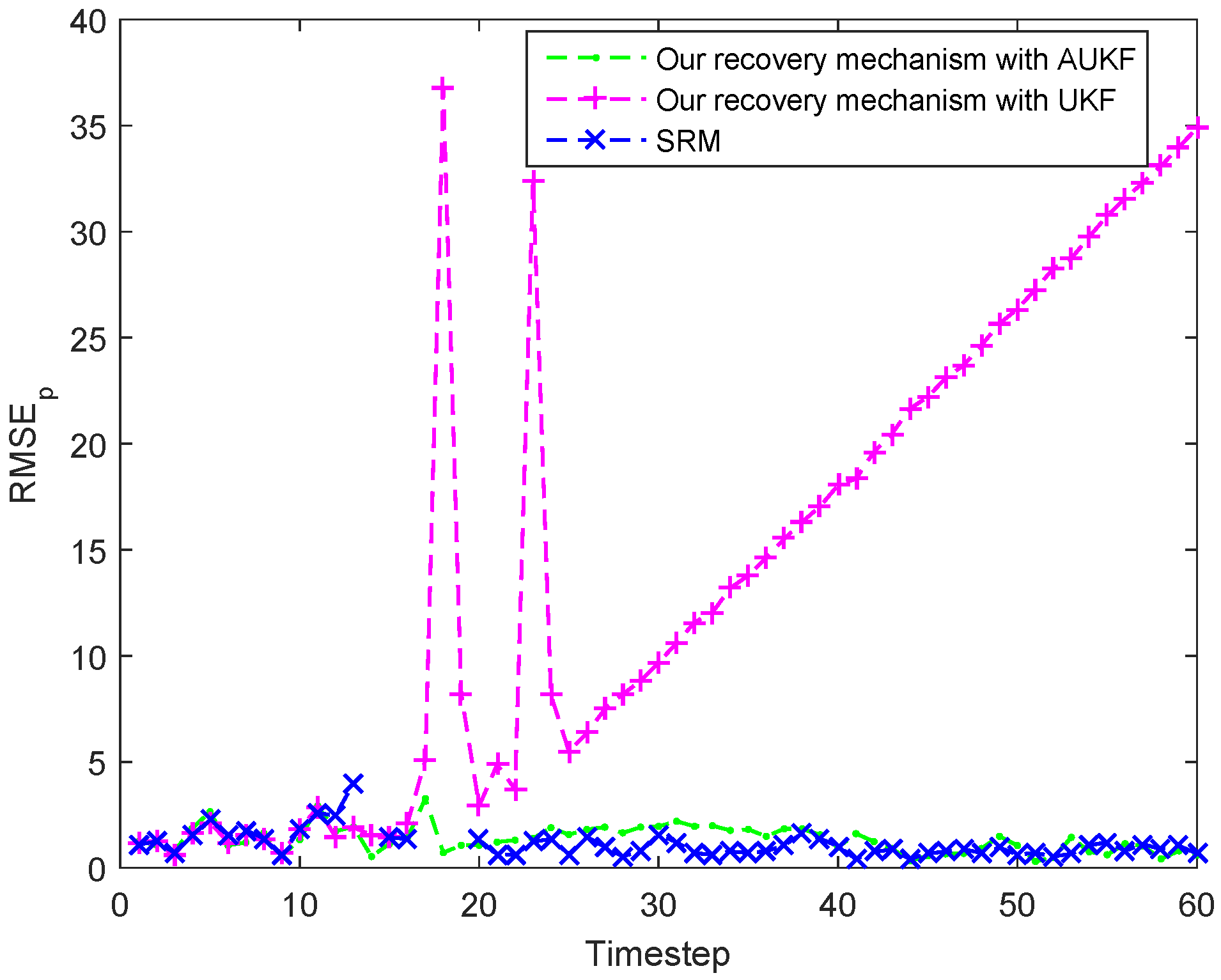
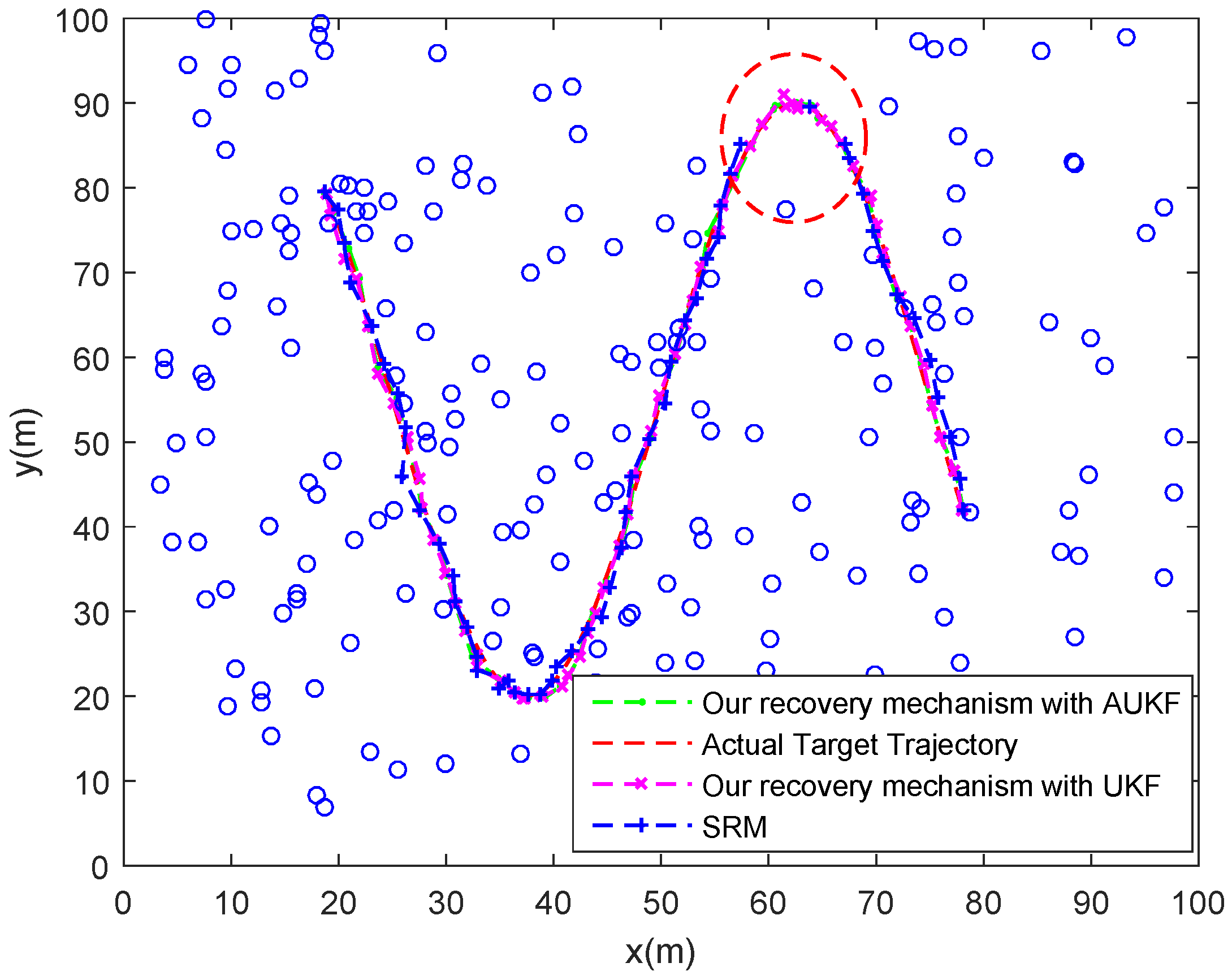
7.4.1. Abrupt Change in Target’s Speed or Direction
7.4.2. Target Enters Coverage Holes in the Monitoring Area
8. Conclusions and Future Work
Author Contributions
Conflicts of Interest
References
- Souza, E.L.; Nakamura, E.F.; Pazzi, R.W. Target Tracking for Sensor Networks: A Survey. ACM Comput. Surv. 2016, 49, 1–31. [Google Scholar] [CrossRef]
- Brunelli, D.; Minakov, I.; Passerone, R.; Rossi, M. POVOMON: An Ad-hoc Wireless Sensor Network for indoor environmental monitoring. In Proceedings of the 2014 IEEE Workshop on Environmental, Energy, and Structural Monitoring Systems, Naples, Italy, 17–18 September 2014; pp. 1–6. [Google Scholar]
- Yoo, J.; Kim, H.J. Target Localization in Wireless Sensor Networks Using Online Semi-Supervised Support Vector Regression. Sensors 2015, 2015, 12539–12559. [Google Scholar] [CrossRef] [PubMed]
- Cenedese, A.; Luvisotto, M.; Michieletto, G. Distributed clustering strategies in industrial wireless sensor networks. IEEE Trans. Ind. Inform. 2017, 13, 228–237. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Weilian, S.; Sankarasubramaniam, Y.; Cayirci, E. A survey on sensor networks. IEEE Commun. Mag. 2002, 40, 102–114. [Google Scholar] [CrossRef]
- Han, G.; Shen, J.; Liu, L.; Shu, L. BRTCO: A Novel Boundary Recognition and Tracking Algorithm for Continuous Objects in Wireless Sensor Networks. IEEE Syst. J. 2017, PP, 1–10. [Google Scholar] [CrossRef]
- Enayet, A.; Razzaque, M.; Hassan, M.; Almogren, A.; Alamri, A. Moving Target Tracking through Distributed Clustering in Directional Sensor Networks. Sensors 2014, 14, 24381–24407. [Google Scholar] [CrossRef] [PubMed]
- Shi, K.; Chen, H.; Lin, Y. Probabilistic coverage based sensor scheduling for target tracking sensor networks. Inf. Sci. 2015, 292, 95–110. [Google Scholar] [CrossRef]
- Shang, C. An Efficient Target Tracking Mechanism for Guaranteeing User-Defined Tracking Quality in WSNs. IEEE Sens. J. 2015, 15, 5258–5271. [Google Scholar] [CrossRef]
- Wen, Y.; Gao, R.; Zhao, H. Energy Efficient Moving Target Tracking in Wireless Sensor Networks. Sensors 2016, 16, 29. [Google Scholar] [CrossRef] [PubMed]
- Hu, X.; Hu, Y.H.; Xu, B. Energy-Balanced Scheduling for Target Tracking in Wireless Sensor Networks Sensor Networks. ACM Trans. Sens. Netw. (TOSN) 2014, 11, 21. [Google Scholar]
- El-Fouly, F.H.; Ramadan, R.A.; Mahmoud, M.I.; Dessouky, M.I. REBTAM: Reliable energy balance traffic aware data reporting algorithm for object tracking in multi-sink wireless sensor networks. Wirel. Netw. 2016, 1–19. [Google Scholar] [CrossRef]
- Fu, P.; Tang, H.; Cheng, Y.; Li, B.; Qian, H.; Yuan, X. An energy-balanced multi-sensor scheduling scheme for collaborative target tracking in wireless sensor networks. Int. J. Distrib. Sens. Netw. 2017, 13. [Google Scholar] [CrossRef]
- Zhou, Z.; Du, C.; Shu, L.; Hancke, G.; Niu, J.; Ning, H. An Energy-Balanced Heuristic for Mobile Sink Scheduling in Hybrid WSNs. IEEE Trans. Ind. Inform. 2016, 12, 28–40. [Google Scholar] [CrossRef]
- Patil, S.; Gupta, A.; Zaveri, M. Recovery of Lost Target Using Target Tracking in Event Driven Clustered Wireless Sensor Network. J. Comput. Netw. Commun. 2014, 2014, 15. [Google Scholar] [CrossRef]
- Hsu, J.M.; Chen, C.C.; Li, C.C. POOT: An efficient object tracking strategy based on short-term optimistic predictions for face-structured sensor networks. Comput. Math. Appl. 2012, 63, 391–406. [Google Scholar] [CrossRef]
- Samarah, S.; Al-Hajri, M.; Boukerche, A. A Predictive Energy-Efficient Technique to Support Object-Tracking Sensor Networks. IEEE Trans. Veh. Technol. 2011, 60, 656–663. [Google Scholar] [CrossRef]
- Gupta, A.; Patil, S.; Zaveri, M. Lost Target Recovery in Wireless Sensor Network Using Tracking. In Proceedings of the International Conference on Communication Systems and Network Technologies, Rajkot, India, 11–13 May 2012; pp. 352–356. [Google Scholar]
- Mahboubi, H.; Masoudimansour, W.; Aghdam, A.G.; Sayrafian-Pour, K. An Energy-Efficient Target-Tracking Strategy for Mobile Sensor Networks. IEEE Trans. Cybern. 2017, 47, 511–523. [Google Scholar] [CrossRef] [PubMed]
- Lembke, K.; Kietlinski, L.; Golanski, M.; Schoeneich, R. RoboMote: Mobile Autonomous Hardware Platform for Wireless Ad-hoc Sensor Networks. In Proceedings of the 2011 IEEE International Symposium on Industrial Electronics (ISIE), Gdansk, Poland, 27–30 June 2011; pp. 940–944. [Google Scholar]
- Wang, T.; Peng, Z.; Liang, J.; Wen, S.; Bhuiyan, M.Z.A.; Cai, Y.; Cao, J. Following targets for mobile tracking in wireless sensor networks. ACM Trans. Sens. Netw. (TOSN) 2016, 12, 31. [Google Scholar] [CrossRef]
- Nakamura, E.F.; Souza, E.L. Towards a flexible event-detection model for wireless sensor networks. In Proceedings of the IEEE Symposium on Computers and Communications, Riccione, Italy, 22–25 June 2010; pp. 459–462. [Google Scholar]
- Liu, W.R.; He, Y.; Zhang, X.Y.; Jiang, F.; Gao, K.; Xiao, J.M. Energy-Efficient Node Scheduling Method for Cooperative Target Tracking in Wireless Sensor Networks. Math. Probl. Eng. 2015, 2015. [Google Scholar] [CrossRef]
- SanMiguel, J.C.; Cavallaro, A. Cost-Aware Coalitions for Collaborative Tracking in Resource-Constrained Camera Networks. IEEE Sens. J. 2015, 15, 2657–2668. [Google Scholar] [CrossRef]
- Oguz-Ekim, P.; Gomes, J.P.; Xavier, J.; Oliveira, P. Robust Localization of Nodes and Time-Recursive Tracking in Sensor Networks Using Noisy Range Measurements. IEEE Trans. Signal Process. 2011, 59, 3930–3942. [Google Scholar] [CrossRef]
- Lin, J.; Xiao, W.; Lewis, F.L.; Xie, L. Energy-Efficient Distributed Adaptive Multisensor Scheduling for Target Tracking in Wireless Sensor Networks. IEEE Trans. Instrum. Meas. 2009, 58, 1886–1896. [Google Scholar]
- Zhou, H.Y.; Luo, D.Y.; Gao, Y.; Zuo, D.C. Modeling of Node Energy Consumption for Wireless Sensor Networks. Wirel. Sens. Netw. 2011, 3, 18–23. [Google Scholar] [CrossRef]
- Fu, P.; Cheng, Y.; Tang, H.; Li, B.; Pei, J.; Yuan, X. An Effective and Robust Decentralized Target Tracking Scheme in Wireless Camera Sensor Networks. Sensors 2017, 17, 639. [Google Scholar] [CrossRef] [PubMed]
- Xing, G.; Li, M.; Wang, T.; Jia, W.; Huang, J. Efficient Rendezvous Algorithms for Mobility-Enabled Wireless Sensor Networks. IEEE Trans. Mob. Comput. 2012, 11, 47–60. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. Unscented filtering and nonlinear estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Gustafsson, F.; Hendeby, G. Some Relations between Extended and Unscented Kalman Filters. IEEE Trans. Signal Process. 2012, 60, 545–555. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. Corrections to “Unscented Filtering and Nonlinear Estimation”. Proc. IEEE 2005, 92, 1958. [Google Scholar] [CrossRef]
- Hajiyev, C.; Soken, H.E. Robust adaptive unscented Kalman filter for attitude estimation of pico satellites. Int. J. Adapt. Control Signal Process. 2014, 28, 107–120. [Google Scholar] [CrossRef]
- Song, Q.; Han, J. An Adaptive UKF Algorithm for the State and Parameter Estimations of a Mobile Robot. Acta Automatica Sin. 2008, 34, 72–79. [Google Scholar]
- Zhou, J.; Knedlik, S.; Loffeld, O. INS/GPS tightly-coupled integration using adaptive unscented particle filter. J. Navig. 2010, 63, 491–511. [Google Scholar] [CrossRef]
- Khare, A.; Sivalingam, K.M. On recovery of lost targets in a cluster-based wireless sensor network. In Proceedings of the IEEE International Conference on Pervasive Computing and Communications Workshops, Seattle, WA, USA, 21–25 March 2011; pp. 208–213. [Google Scholar]
- Fang, B.T. Trilateration and Extension to Global Positioning System Navigation. J. Guid. Control Dyn. 1986, 9, 715–717. [Google Scholar] [CrossRef]
- Li, X.R.; Zhao, Z. Evaluation of estimation algorithms part I: Incomprehensive measures of performance. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 1340–1358. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Notation | Symbol | Notation | Symbol | Notation |
|---|---|---|---|---|---|
| MN | Motion node | Position vector of ℑ | m | Position vector of MN | |
| r | Sensing radius | Uncertainty distance | R | Covariance matrix of v | |
| SN | Static node | Target state vector | Probability of ℑ sensed by | ||
| ℑ | The target | Position vector of | Distance between and ℑ | ||
| Tracking cluster | The sensor node | Probability of ℑ sensed by | |||
| w | Process noise | z | Measurement vector | Q | Covariance matrix of w |
| Cluster node set | v | Measurement noise | Sampling time interval | ||
| Number of | Velocity vector of ℑ | Sensing and processing cost | |||
| Receiving cost | Transmission cost | Total energy cost of a node | |||
| Estimation of x | Innovation sequence | Cross covariance matrix | |||
| Prediction of x | Estimation of P | Innovation covariance matrix | |||
| Parameters of | Initial R of AUKF | Error covariance of state | |||
| Thresholds of | Thresholds of | Remaining energy of | |||
| Parameters of | Bits of data packets | c of energy cost |
| , | , |
| , | , |
| , | = 0.5 s, |
| r = 10 m, | t = 2 m, |
| , | , |
| = 0.05 J | = 0.2 J, |
| , | , |
| , | , |
| , | , |
| J/bit, | J/bit, |
| J/bit, | J/bit, |
| = 48 bits, | . |
| Recovery Mechanisms | Averaged Amount of Activated Nodes in One Tracking Action | |
|---|---|---|
| Our recovery mechanism with AUKF | 6.010 | 1.581 m |
| Source recovery mechanism (SRM) | 24.505 | 1.378 m |
| Our recovery mechanism with UKF | - | 18.360 m |
| Recovery Mechanisms | Averaged Amount of Activated Nodes in One Tracking Action | |
|---|---|---|
| Our recovery mechanism with AUKF | 3.5 | 0.977 m |
| Source recovery mechanism (SRM) | 433.996 | 2.140 m |
| Our recovery mechanism with UKF | 3.7 | 1.153 m |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qian, H.; Fu, P.; Li, B.; Liu, J.; Yuan, X. A Novel Loss Recovery and Tracking Scheme for Maneuvering Target in Hybrid WSNs. Sensors 2018, 18, 341. https://doi.org/10.3390/s18020341
Qian H, Fu P, Li B, Liu J, Yuan X. A Novel Loss Recovery and Tracking Scheme for Maneuvering Target in Hybrid WSNs. Sensors. 2018; 18(2):341. https://doi.org/10.3390/s18020341
Chicago/Turabian StyleQian, Hanwang, Pengcheng Fu, Baoqing Li, Jianpo Liu, and Xiaobing Yuan. 2018. "A Novel Loss Recovery and Tracking Scheme for Maneuvering Target in Hybrid WSNs" Sensors 18, no. 2: 341. https://doi.org/10.3390/s18020341
APA StyleQian, H., Fu, P., Li, B., Liu, J., & Yuan, X. (2018). A Novel Loss Recovery and Tracking Scheme for Maneuvering Target in Hybrid WSNs. Sensors, 18(2), 341. https://doi.org/10.3390/s18020341