Improved WαSH Feature Matching Based on 2D-DWT for Stereo Remote Sensing Images


Abstract
1. Introduction
2. 2D-DWT
3. WαSH Feature Detector
- (1)
- Edge detecting: is the normalized gradient image of the input image in . The binary edge image is acquired by applying the Canny detector on .
- (2)
- Edge sampling: With a fixed sampling interval , is sampled uniformly along edges to obtain a discrete set of edge points . For each point , the weight is defined to be multiple of its gradient strength:where is the value of at .
- (3)
- WαSH construction: Regular triangulation of is calculated. The line segments and triangles of triangulation are added into a collection and are ordered by descending size, followed by the weighted α-shape constructing. For more details, please see [19].
- (4)
- Feature extracting: the neighbors of each triangle are its three edges, while the neighbors of each line segments are the two adjacent triangles in the triangulation. Since the size of an edge is not larger than that of its two adjacent triangles, and α is decreasing, the intuition is that this edge can keep the two triangles disconnected until it is processed itself. Based on this neighborhood system, each connected weighted α complex is called a component. Considering that each element (line segment or triangle) of in descending order of size is an independent component, the components are joined with their neighbors that have already been processed. Decreasing the value of α continuously, the strength of a component is calculated following Equation (2) when it is joined to another component through its boundary element:where is the total area of (the area of the line segment is 0); is the size of the boundary element. If strength is greater than a fixed threshold , the component is determined to be a WαSH feature which is consequently fitted to an ellipse. We assume the image coordinate of the ellipse center is , and the ellipse parameter is , then the ellipse equation is . The WαSH feature is denoted as in this paper.
4. Algorithm
4.1. Feature Set Construction
4.1.1. WWF Set Constructing
4.1.2. IWWF Set Constructing
4.1.3. LIWWF Set Constructing
4.2. Similarly Matching
5. Experiments and Analysis
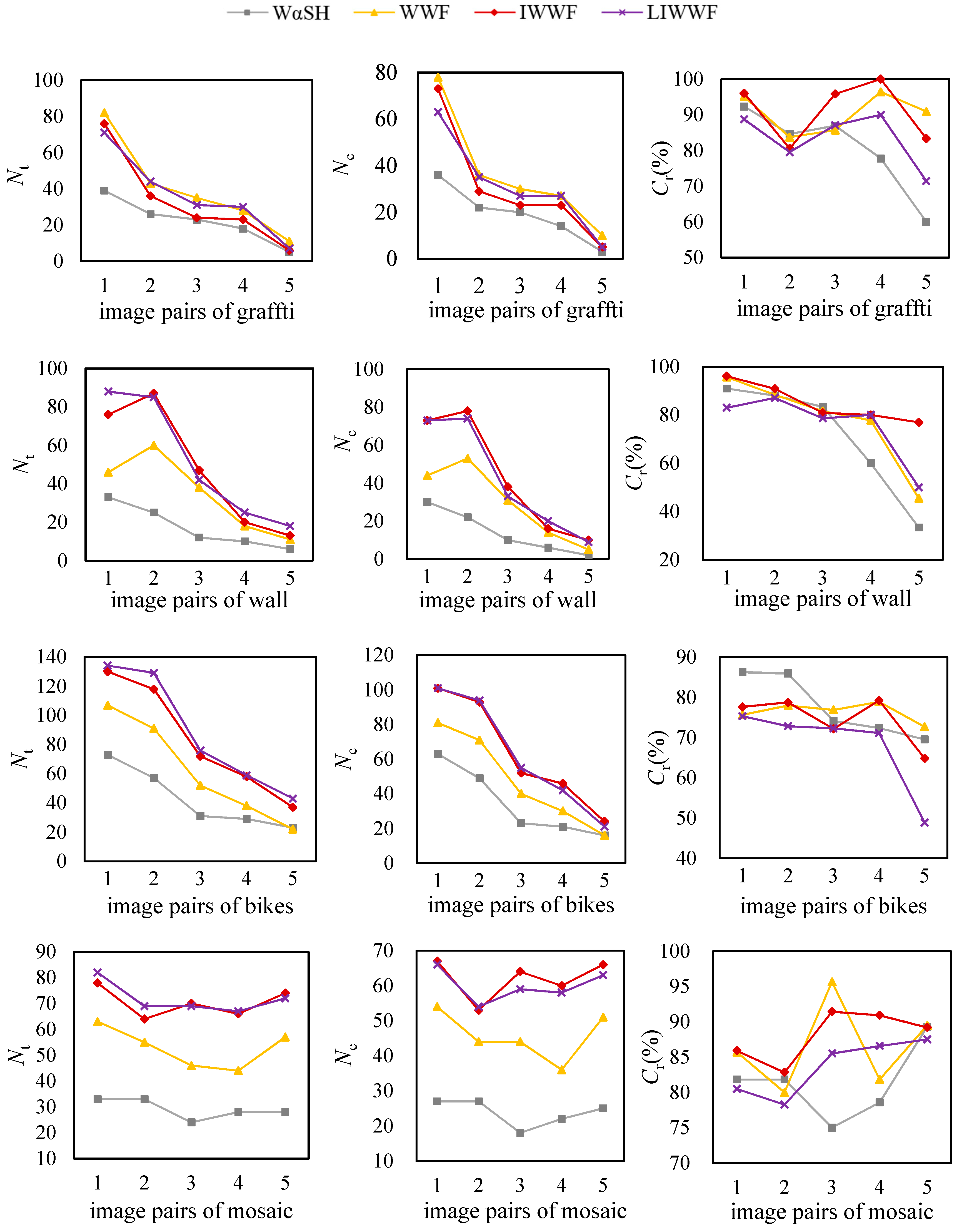
5.1. Performance Compared to WαSH for Different Distortion
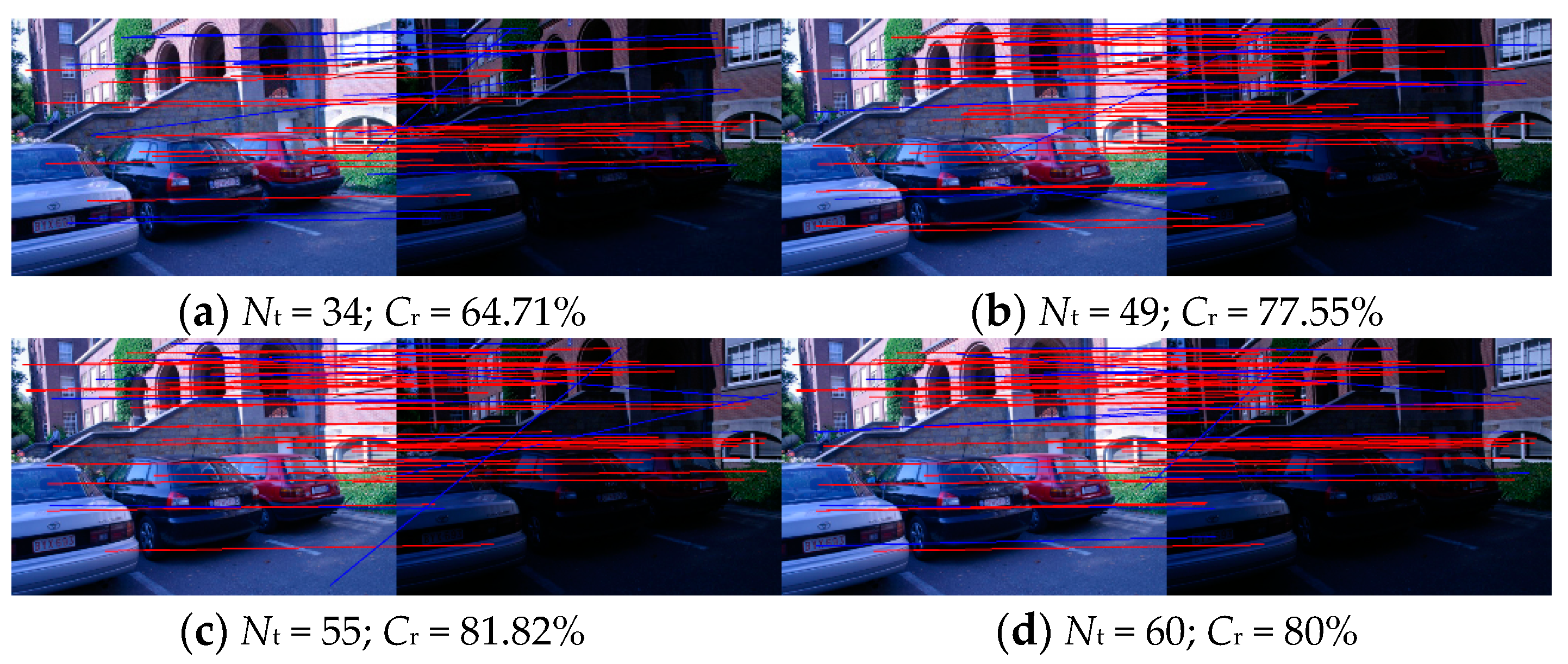
5.2. Application for Stereo Remote Sensing Images Matching
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Yu, Z.; Zhou, H.; Li, C. Fast non-rigid image feature matching for agricultural UAV via probabilistic inference with regularization techniques. Comput. Electron. Agric. 2017, 143, 79–89. [Google Scholar] [CrossRef]
- Sedaghat, A.; Mokhtarzade, M.; Ebadi, H. Uniform Robust Scale-Invariant Feature Matching for Optical Remote Sensing Images. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4516–4527. [Google Scholar] [CrossRef]
- Kahaki, S.M.M.; Arshad, H.; Nordin, M.J.; Ismail, W. Geometric feature descriptor and dissimilarity-based registration of remotely sensed imagery. PLoS ONE 2018, 13, e200676. [Google Scholar] [CrossRef] [PubMed]
- Kalantar, B.; Mansor, S.B.; Abdul Halin, A.; Shafri, H.Z.M.; Zand, M. Multiple Moving Object Detection from UAV Videos Using Trajectories of Matched Regional Adjacency Graphs. IEEE Trans. Geosci. Remote Sens. 2017, 55, 5198–5213. [Google Scholar] [CrossRef]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Chang, X.; Du, S.; Li, Y.; Fang, S. A Coarse-to-Fine Geometric Scale-Invariant Feature Transform for Large Size High Resolution Satellite Image Registration. Sensors 2018, 18, 1360. [Google Scholar] [CrossRef] [PubMed]
- Xiang, Y.; Wang, F.; You, H. An Automatic and Novel SAR Image Registration Algorithm: A Case Study of the Chinese GF-3 Satellite. Sensors 2018, 18, 672. [Google Scholar] [CrossRef] [PubMed]
- Youjie, Q.I.; Zhu, E. A New Fast Matching Algorithm by Trans-Scale Search for Remote Sensing Image. Chin. J. Electron. 2015, 24, 654–660. [Google Scholar]
- Jiang, S.; Jiang, W. Efficient structure from motion for oblique UAV images based on maximal spanning tree expansion. ISPRS J. Photogramm. 2017, 132, 140–161. [Google Scholar] [CrossRef]
- Morel, J.; Yu, G. ASIFT: A New Framework for Fully Affine Invariant Image Comparison. SIAM J. Imaging Sci. 2009, 2, 438–469. [Google Scholar] [CrossRef]
- Mikolajczyk, K.; Schmid, C. Scale & Affine Invariant Interest Point Detectors. Int. J. Comput. Vis. 2004, 60, 63–86. [Google Scholar] [CrossRef]
- Matas, J.; Chum, O.; Urban, M.; Pajdla, T. Robust Wide-baseline Stereo from Maximally Stable Extremal Regions. Image Vis. Comput. 2004, 22, 761–767. [Google Scholar] [CrossRef]
- Tuytelaars, T.; Van Gool, L. Matching Widely Separated Views Based on Affine Invariant Regions. Int. J. Comput. Vis. 2004, 51, 61–85. [Google Scholar] [CrossRef]
- Tuytelaars, T.; Van Gool, L. Content-based image retrieval based on local affinely invariant regions. In Proceedings of the International Conference on Visual Information and Information Systems, Amsterdam, The Netherlands, 2–4 June 1999; Volume 1614, pp. 493–500. [Google Scholar]
- Mikolajczyk, K.; Tuytelaars, T.; Schmid, C.; Zisserman, A.; Matas, J.; Schaffalitzky, F.; Kadir, T.; Gool, L.V. A Comparison of Affine Region Detectors. Int. J. Comput. Vis. 2005, 65, 43–72. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, Y.; Wang, L. Registration of Images with Affine Geometric Distortion Based on Maximally Stable Extremal Regions and Phase Congruency. Image Vis. Comput. 2015, 36, 23–39. [Google Scholar] [CrossRef]
- Sedaghat, A.; Ebadi, H. Accurate Affine Invariant Image Matching Using Oriented Least Square. Photogramm. Eng. Remote Sens. 2015, 81, 733–743. [Google Scholar] [CrossRef]
- Yu, M.; Yang, H.; Deng, K.; Yuan, K. Registrating oblique images by integrating affine and scale-invariant features. Int. J. Remote Sens. 2018, 39, 3386. [Google Scholar] [CrossRef]
- Varytimidis, C.; Rapantzikos, K.; Avrithis, Y.; Kollias, S. α-shapes for local feature detection. Pattern Recogn. 2016, 50, 56–73. [Google Scholar] [CrossRef]
- Varytimidis, C.; Rapantzikos, K.; Avrithis, Y. WαSH: Weighted α-Shapes for Local Feature Detection. In Proceedings of the ECCV’12 12th European Conference on Computer Vision, Florence, Italy, 7–13 October 2012; pp. 788–801. [Google Scholar]
- Avrithis, Y.; Rapantzikos, K. The Medial Feature Detector: Stable Regions from Image Boundaries. In Proceedings of the IEEE International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; Volume 24, pp. 1724–1731. [Google Scholar]
- Zitnick, C.L.; Ramnath, K. Edge foci interest points. In Proceedings of the International Conference on Computer Vision (ICCV), Barcelona, Spain, 6–13 November 2011; pp. 359–366. [Google Scholar]
- Alcantarilla, P.F.; Bartoli, A.; Davison, A.J. KAZE features. In Proceedings of the European Conference on Computer Vision, Florence, Italy, 7–13 October 2012; Volume 7577, pp. 214–227. [Google Scholar]
- Hussein, A.J.; Hu, F.; He, F. Multisensor of thermal and visual images to detect concealed weapon using harmony search image fusion approach. Pattern Recogn. Lett. 2017, 94, 219–227. [Google Scholar] [CrossRef]
- Luo, X.; Bhakta, T. Estimating observation error covariance matrix of seismic data from a perspective of image denoising. Comput. Geosci. 2017, 21, 205–222. [Google Scholar] [CrossRef]
- Mikolajczyk, K.; Schmid, C. A Performance Evaluation of Local Descriptors. IEEE Trans. Pattern Anal. 2005, 27, 1615–1630. [Google Scholar] [CrossRef] [PubMed]
- Krystian Mikolajczyk Personal Homepage. Available online: http://lear.inrialpes.fr/people/mikolajczyk/ (accessed on 15 January 2018).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| WαSH Features on | Repeatability | Cr |
|---|---|---|
| Original image | 53.719% | 67.68% (described on original image) |
| LL layer | 48.7395% | 79% (described on original image) |
| 88.36% (described on LL layer) | ||
| LH layer | 52.5424% | 62.5% (described on LH layer) |
| HL layer | 38.2022% | 84.62% (described on HL layer) |
| MSER | DWT-MSER | WαSH | DWT-WαSH | KAZE | WWF | IWWF | LIWWF | ||
|---|---|---|---|---|---|---|---|---|---|
| Figure 7a | Nt | 9 | 1 | 7 | 10 | 28 | 15 | 14 | 18 |
| Nc | 4 | 0 | 6 | 6 | 10 | 7 | 10 | 10 | |
| Cr | 44.44 | 0.00 | 85.71 | 60.00 | 35.71 | 46.67 | 71.43 | 55.56 | |
| Figure 7b | Nt | 34 | 11 | 13 | 16 | 206 | 21 | 22 | 28 |
| Nc | 7 | 3 | 6 | 7 | 111 | 5 | 11 | 14 | |
| Cr | 20.59 | 27.27 | 46.15 | 43.75 | 53.88 | 23.81 | 50.00 | 50.00 | |
| Figure 7c | Nt | 66 | 55 | 15 | 34 | 1236 | 18 | 34 | 40 |
| Nc | 46 | 38 | 13 | 27 | 1114 | 18 | 33 | 36 | |
| Cr | 69.70 | 69.09 | 88.67 | 79.41 | 90.13 | 100.00 | 97.06 | 90.00 | |
| Figure 7d | Nt | 19 | 9 | 14 | 30 | 199 | 28 | 36 | 42 |
| Nc | 8 | 4 | 7 | 12 | 82 | 13 | 19 | 20 | |
| Cr | 42.11 | 44.44 | 50.00 | 40.00 | 46.23 | 46.43 | 52.78 | 47.62 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, M.; Deng, K.; Yang, H.; Qin, C. Improved WαSH Feature Matching Based on 2D-DWT for Stereo Remote Sensing Images. Sensors 2018, 18, 3494. https://doi.org/10.3390/s18103494
Yu M, Deng K, Yang H, Qin C. Improved WαSH Feature Matching Based on 2D-DWT for Stereo Remote Sensing Images. Sensors. 2018; 18(10):3494. https://doi.org/10.3390/s18103494
Chicago/Turabian StyleYu, Mei, Kazhong Deng, Huachao Yang, and Changbiao Qin. 2018. "Improved WαSH Feature Matching Based on 2D-DWT for Stereo Remote Sensing Images" Sensors 18, no. 10: 3494. https://doi.org/10.3390/s18103494
APA StyleYu, M., Deng, K., Yang, H., & Qin, C. (2018). Improved WαSH Feature Matching Based on 2D-DWT for Stereo Remote Sensing Images. Sensors, 18(10), 3494. https://doi.org/10.3390/s18103494