Highly Accurate Step Counting at Various Walking States Using Low-Cost Inertial Measurement Unit Support Indoor Positioning System

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
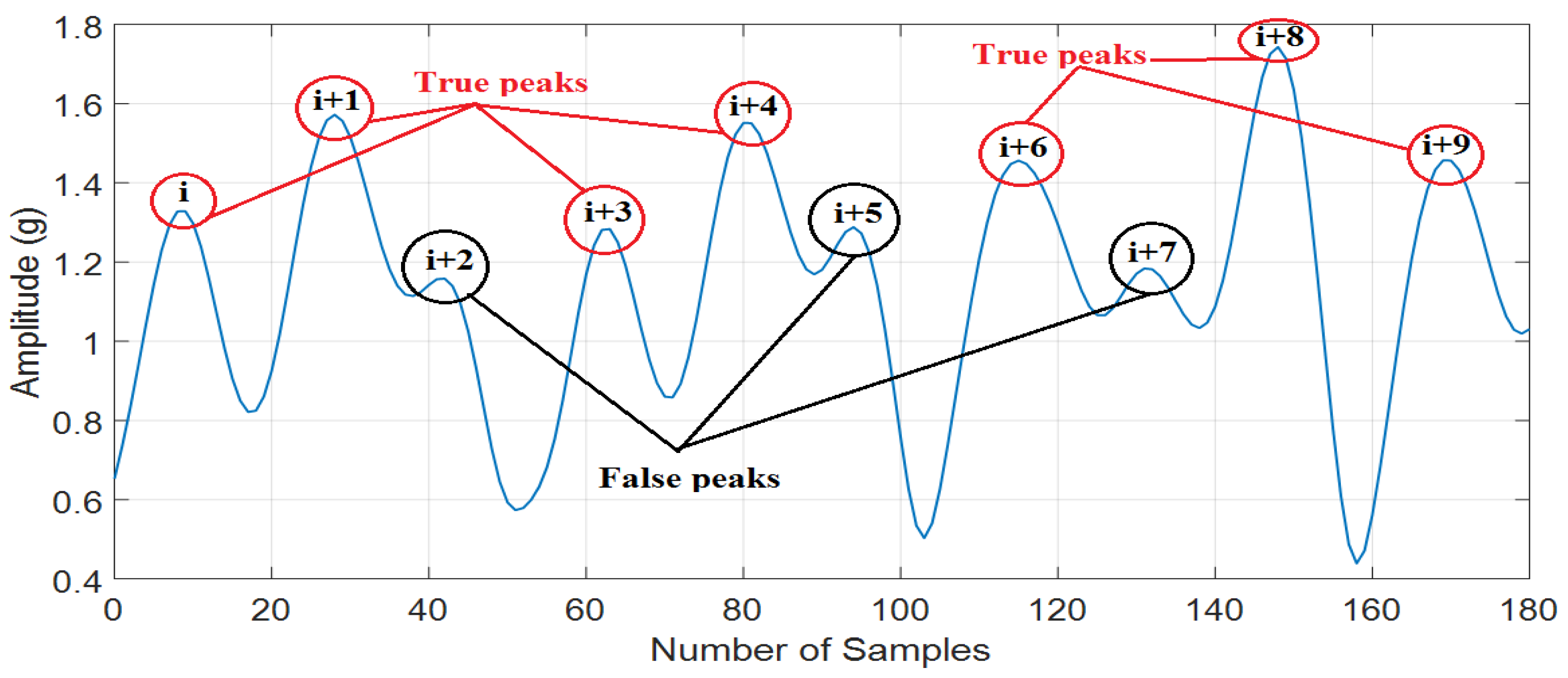
- ○
- Crosses the higher peak
- ○
- Reaches the left or right of the signal in a window
3. Results
3.1. The Experimental Setup
3.2. Testing Process
4. Discussion
4.1. Comparison with Other Methods
4.2. Comparison with Other Commercial Applications
4.3. Testing with Public Datasets
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rantakokko, J.; Rydell, J.; Strömbäck, P.; Händel, P.; Callmer, J.; Törnqvist, D.; Gustafsson, F.; Jobs, M.; Grudén, M. Accurate and reliable soldier and first responder indoor positioning: Multisensor systems and cooperative localization. IEEE Wirel. Commun. 2011, 18, 10–18. [Google Scholar] [CrossRef]
- Hu, X.; Shang, J.; Gu, F.; Han, Q. Improving Wi-Fi indoor positioning via ap sets similarity and semi-supervised affinity propagation clustering. Int. J. Distrib. Sens. Netw. 2015, 2015, 109642. [Google Scholar] [CrossRef]
- Chang, N.; Rashidzadeh, R.; Ahmadi, M. Robust indoor positioning using differential Wi-Fi access points. IEEE Trans. Consum. Electron. 2010, 56, 1860–1867. [Google Scholar] [CrossRef]
- Jeon, H.; Jo, U.; Jo, M.; Kim, N.; Kim, Y. An Adaptive AP Selection Scheme Based on RSS for Enhancing Positioning Accuracy. Wirel. Pers. Commun. 2013, 69, 1535–1550. [Google Scholar] [CrossRef]
- Cramariuc, A.; Huttunen, H.; Lohan, E.S. Clustering benefits in mobile-centric WiFi positioning in multi-floor building. In Proceedings of the 2016 International Conference on Localization and GNSS (ICL-GNSS), Barcelona, Spain, 28–30 June 2016; pp. 1–6. [Google Scholar]
- Ho, N.H.; Truong, P.H.; Jeong, G.M. Step-Detection and Adaptive Step-Length Estimation for Pedestrian Dead-Reckoning at Various Walking Speeds Using a Smartphone. Sensors 2016, 16, 1423. [Google Scholar] [CrossRef] [PubMed]
- Gu, F.; Khoshelham, K.; Shang, J.; Yu, F.; Wei, Z. Robust and Accurate Smartphone-Based Step Counting for Indoor Localization. IEEE Sens. J. 2017, 17, 3453–3460. [Google Scholar] [CrossRef]
- Kang, X.; Huang, B.; Qi, G. A Novel Walking Detection and Step Counting Algorithm Using Unconstrained Smartphones. Sensors 2018, 18, 297. [Google Scholar] [CrossRef] [PubMed]
- Feng, Y.; Wong, C.K.; Janeja, V.; Kuber, R.; Mentis, H.M. Comparison of tri-axial accelerometers step-count accuracy in slow walking conditions. Gait Posture 2017, 53, 11–16. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Yuan, W.; Shen, Q.; Li, T.; Chang, H. A handheld inertial pedestrian navigation system with accurate step modes and device poses recognition. IEEE Sens. J. 2015, 15, 1421–1429. [Google Scholar] [CrossRef]
- Bassett, D.R., Jr.; Toth, L.P.; LaMunion, S.R.; Crouter, S.E. Step Counting: A Review of Measurement Considerations and Health-Related Applications. Sports Med. 2017, 47, 1303–1315. [Google Scholar] [CrossRef] [PubMed]
- Genovese, V.; Mannini, A.; Sabatini, A.M. A Smartwatch Step Counter for Slow and Intermittent Ambulation. IEEE Access 2017, 5, 13028–13037. [Google Scholar] [CrossRef]
- Thorup, C.B.; Andreasen, J.J.; Sørensen, E.E.; Grønkjær, M.; Dinesen, B.I.; Hansen, J. Accuracy of a step counter during treadmill and daily life walking by healthy adults and patients with cardiac disease. BMJ Open 2017, 7, e011742. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, L.; Liu, T.; Wang, Y.; Li, Q.; Inoue, J.Y.Y. Evaluation on Step Counting Performance of Wristband Activity Monitors in Daily Living Environment. IEEE Access 2017, 5, 13020–13027. [Google Scholar] [CrossRef]
- Johnson, M. Activity Monitors Step Count Accuracy in Community-Dwelling Older Adults. Gerontol. Geriatr. Med. 2015. [Google Scholar] [CrossRef] [PubMed]
- van Thanh, P.; Thi, A.N.; Thuy, Q.T.T.; Phuong, D.C.T.; Mau, V.H.; Tran, D. A Novel Step Counter Supporting for Indoor Positioning Based on Inertial Measurement Unit. In Proceedings of the 7th International Conference on Integrated Circuits, Design, and Verification (ICDV), Hanoi, Vietnam, 5–6 October 2017; pp. 69–74. [Google Scholar]
- Tang, Z.; Guo, Y.; Chen, X. Self-adaptive Step Counting on Smartphones under Unrestricted Stepping Modes. In Proceedings of the 2016 IEEE 40th Annual Computer Software and Applications Conference (COMPSAC), Atlanta, GA, USA, 10–14 June 2016; pp. 788–797. [Google Scholar]
- Lee, H.; Bae, M.; Shin, D.B.; Lee, S.; Myeong, S.; Hong, S.G.; Yang, H.; Choi, J.; Son, K.Y.; Lee, K.B.; et al. ATHENA: Distributed IoT Systems Providing Salient Features for Safety of Firefighters in Infra-Less Fire Environments. In Proceedings of the International Conference on Platform Technology and Service (PlatCon), Busan, South Korea, 13–15 February 2017. [Google Scholar]
- Ferreira, A.G.; Fernandes, D.; Catarino, A.P.; Monteiro, J.L. Localization and Positioning Systems for Emergency Responders: A Survey. IEEE Commun. Surv. Tutor. 2017, 19, 2836–2870. [Google Scholar] [CrossRef]
- Nilsson, J.O.; Rantakokko, J.; Händel, P.; Skog, I.; Ohlsson, M.; Hari, K.V.S. Accurate Indoor Positioning of Firefighters using Dual Foot-mounted Inertial Sensors and Inter-agent Ranging. In Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 5–8 May 2014. [Google Scholar]
- Kales, S.N.; Soteriades, E.S.; Christoudias, S.G.; Christiani, D.C. Firefighters and on-duty deaths from coronary heart disease: A case control study. Environ. Health A Glob. Access Sci. Source 2003, 2, 14. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Loh, D.; Zihajehzadeh, S.; Hoskinson, R.; Abdollahi, H.; Park, E.J. Pedestrian Dead Reckoning With Smartglasses and Smartwatch. IEEE Sens. J. 2016, 16, 8132–8141. [Google Scholar] [CrossRef]
- Mannini, A.; Intille, S.S.; Rosenberger, M.; Sabatini, A.M.; Haskell, W. Activity recognition using a single accelerometer placed at the wrist or ankle. Med. Sci. Sports Exerc. 2013, 45, 2193–2203. [Google Scholar] [CrossRef] [PubMed]
- Gu, F.; Kealy, A.; Shang, K.K.J. User-Independent Motion State Recognition Using Smartphone Sensors. Sensors 2015, 15, 30636–30652. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- van Thanh, P.; Tran, D.; Nguyen, D.; Anh, N.D.; Dinh, D.N.; El-Rabaie, S.; Sandrasegaran, K. Development of a Real-time, Simple and High-Accurate Fall Detection System for Elderly Using 3-DOF Accelerometers. Arabian J. Sci. Eng. 2018. [Google Scholar] [CrossRef]
- Davide Figo, P.C.; Diniz, D.R.; Ferreira, J.M.P.C. Preprocessing techniques for context recognition from accelerometer data. Pers. Ubiquitous Comput. 2010, 14, 645–662. [Google Scholar] [CrossRef] [Green Version]
- Cavagnaand, G.A.; Franzetti, P. The determinants of the step frequency in walking in humans. J. Physiol. 1986, 373, 235–242. [Google Scholar] [CrossRef]
- Kirmse, A.; de Ferranti, J. Calculating the prominence and isolation of every mountain in the world. Prog. Phys. Geogr. 2017, 41, 788–802. [Google Scholar] [CrossRef]
- Prominence Theory. Available online: http://www.peaklist.org/theory/theory.html (accessed on 3 October 2017).
- Google Play. Available online: http://play.google.com (accessed on July 14 2018).
- Samsung Electronics Co., Ltd. Samsung Health. Available online: Health.apps.samsung.com (accessed on 3 March 2018).
- Apple Inc. Health. Available online: www.apple.com/ios/health (accessed on 3 March 2018).
- Pacer Heath. Pedometer, Step Counter & Weight Loss Tracker App. Available online: www.mypacer.com (accessed on 3 March 2018).
- Walking Datasets. Available online: https://github.com/Oxford-step-counter/DataSet/tree/master/validation (accessed on 30 August 2018).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Peak | Horizontal Line Extends to the Left and | Horizontal Line Extends to the Right and | Lowest Point on the Left Interval | Lowest Point on the Right Interval | Minimal Peak Prominence of the Peak (the Difference between the Peak and) |
|---|---|---|---|---|---|
| (i) | Reaches the left end | Crosses the peak (i+1) | Left endpoint | a | a |
| (i+1) | Reaches the left end | Crosses the peak (i+8) | Left endpoint | f | Left endpoint |
| (i+2) | Crosses the peak (i+1) | Crosses the peak (i+3) | b | c | b |
| (i+3) | Crosses the peak (i+1) | Crosses the peak (i+4) | c | d | d |
| (i+4) | Crosses the peak (i+1) | Crosses the peak (i+8) | c | f | c |
| (i+5) | Crosses the peak (i+4) | Crosses the peak (i+6) | e | f | e |
| (i+6) | Crosses the peak (i+4) | Crosses the peak (i+8) | f | h | h |
| (i+7) | Crosses the peak (i+6) | Crosses the peak (i+8) | g | h | g |
| (i+8) | Reaches the left end | Reaches the right end | f | k | f |
| (i+9) | Crosses the peak (i+8) | Reaches the right end | k | l | l |
| The States | Minimal Peak Prominence Threshold (H) |
|---|---|
| Fast walking | 0.35 g |
| Normal walking | 0.25 g |
| Slow walking | 0.2 g |
| Speed Level | Average Speed and Step Length for Each State | The Average Time Period for Each Step Ranges Ts(s) | |
|---|---|---|---|
| Slow walking | Mean ± Std (m/s) Step length (m) | 0.937 ± 0.040 (m/s) 0.595 (m) | 0.635 (s) |
| Normal walking | Mean ± Std (m/s) Step length (m) | 1.360 ± 0.037 (m/s) 0.690 (m) | 0.507 (s) |
| Fast walking | Mean ± Std (m/s) Step length (m) | 1.70 ± 0.065 (m/s) 0.797 (m) | 0.469 (s) |
| The States | ThVib1 Threshold |
|---|---|
| Fast walking | 0.15 g |
| Normal walking | 0.1 g |
| Slow walking | 0.08 g |
| The States | Our Propose Method | Step Counting Based Periodicity, Similarity and Continuity [7] | Step Counting Based Peak Detection Method [7] |
|---|---|---|---|
| Free walking | 0.58% | 11.18% | 37.35% |
| Fast walking | 1.06% | 4.26% | 26.73% |
| Slow walking | 2.42% | 14.92% | 96.77% |
| False walking | 3.53% | 15.90% | 52.70% |
| Times | 1 | 2 | 3 | 4 | 5 | Average Number of Steps | Average Error |
|---|---|---|---|---|---|---|---|
| True steps | 500 | 500 | 500 | 500 | 500 | 500 | 0 |
| Our proposed system | 500 | 498 | 499 | 500 | 499 | 499.2 | 0.16% |
| S-Health on Galaxy S5 (Android 6.01) [31] | 500 | 502 | 498 | 503 | 499 | 500.4 | 0.32% |
| Health App on IPhone 5s (iOS 10.3.3) [32] | 499 | 507 | 489 | 477 | 482 | 490.8 | 2.40% |
| Pedometer & Weight Loss Coach installed on Lenovo P780 [33] | 461 | 448 | 376 | 483 | 472 | 448 | 10.40% |
| User No. | Positions | True Steps | Our Proposed Algorithm | Accuracy |
|---|---|---|---|---|
| 1 | Hand | 326 | 323 | 99.08% |
| Front_pocket | 327 | 325 | 99.39% | |
| Back_pocket | 343 | 327 | 95.34% | |
| Neck pouch | 346 | 339 | 97.98% | |
| Bag | 346 | 333 | 96.24% | |
| Armband | 335 | 335 | 100% | |
| 2 | Hand | 340 | 332 | 97.65% |
| Front_pocket | 343 | 329 | 95.92% | |
| Back_pocket | 337 | 335 | 99.41% | |
| Neck pouch | 360 | 348 | 96.67% | |
| Bag | 361 | 322 | 89.2% | |
| Armband | 343 | 335 | 97.67% | |
| Average accuracy | 97.04% | |||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pham, V.T.; Nguyen, D.A.; Dang, N.D.; Pham, H.H.; Tran, V.A.; Sandrasegaran, K.; Tran, D.-T. Highly Accurate Step Counting at Various Walking States Using Low-Cost Inertial Measurement Unit Support Indoor Positioning System. Sensors 2018, 18, 3186. https://doi.org/10.3390/s18103186
Pham VT, Nguyen DA, Dang ND, Pham HH, Tran VA, Sandrasegaran K, Tran D-T. Highly Accurate Step Counting at Various Walking States Using Low-Cost Inertial Measurement Unit Support Indoor Positioning System. Sensors. 2018; 18(10):3186. https://doi.org/10.3390/s18103186
Chicago/Turabian StylePham, Van Thanh, Duc Anh Nguyen, Nhu Dinh Dang, Hong Hai Pham, Van An Tran, Kumbesan Sandrasegaran, and Duc-Tan Tran. 2018. "Highly Accurate Step Counting at Various Walking States Using Low-Cost Inertial Measurement Unit Support Indoor Positioning System" Sensors 18, no. 10: 3186. https://doi.org/10.3390/s18103186