Self-Adaption Matched Filter and Bi-Directional Difference Method for Moving Target Detection

 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Formulation of Target Detection
3. Target Detection Method
3.1. SMF Technique
3.2. ACA Method
3.3. BDD Technique
- Step 1
- Detect the target repetitively using a single-component LFM signal in a urban environment and remove the background noise using the priori information;
- Step 2
- Encode the echoes using the SMF and remove the coherent part based on the test data;
- Step 3
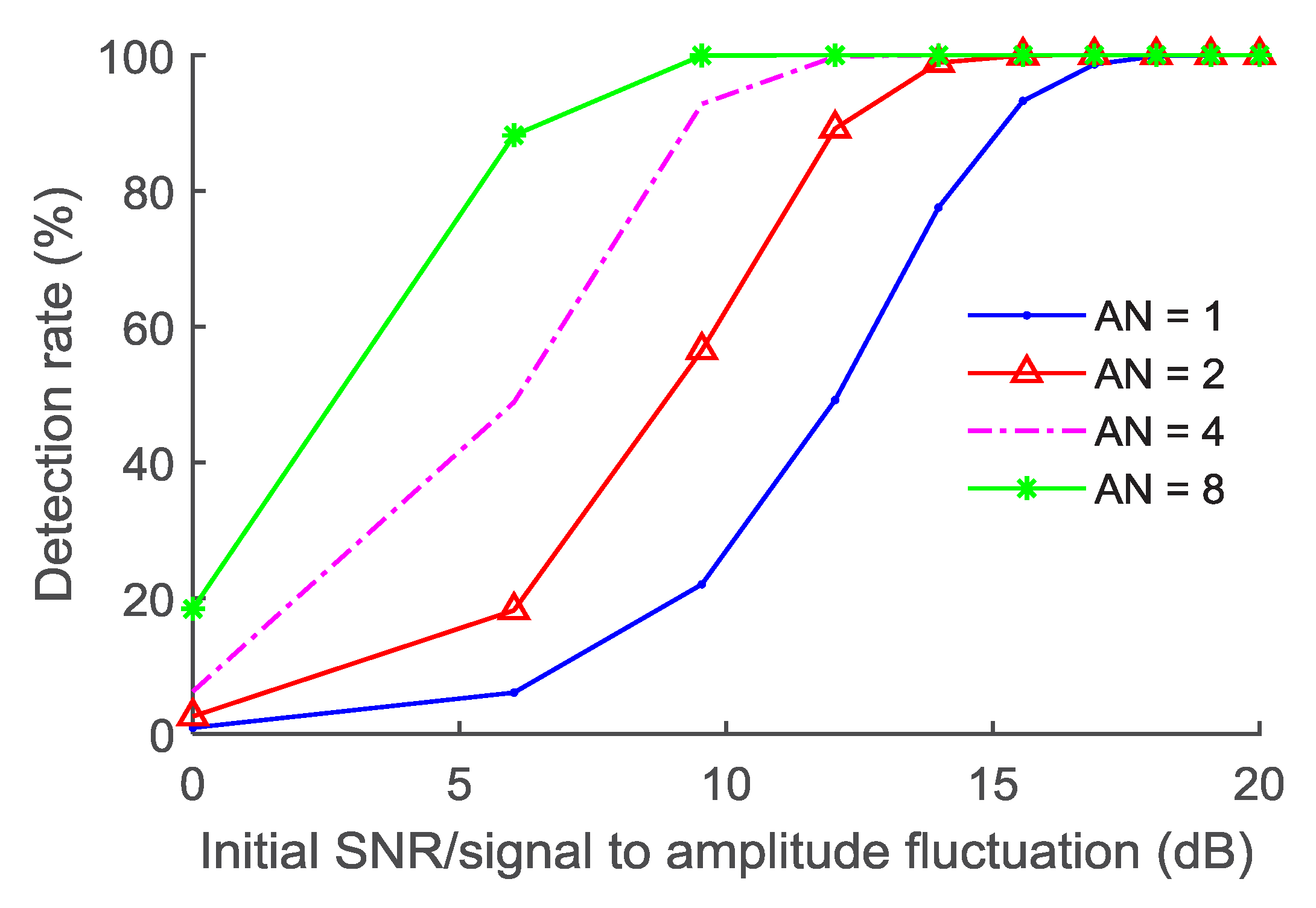
- Employ ACA method to improve the SINR and reduce the amplitude fluctuation of the interference;
- Step 4
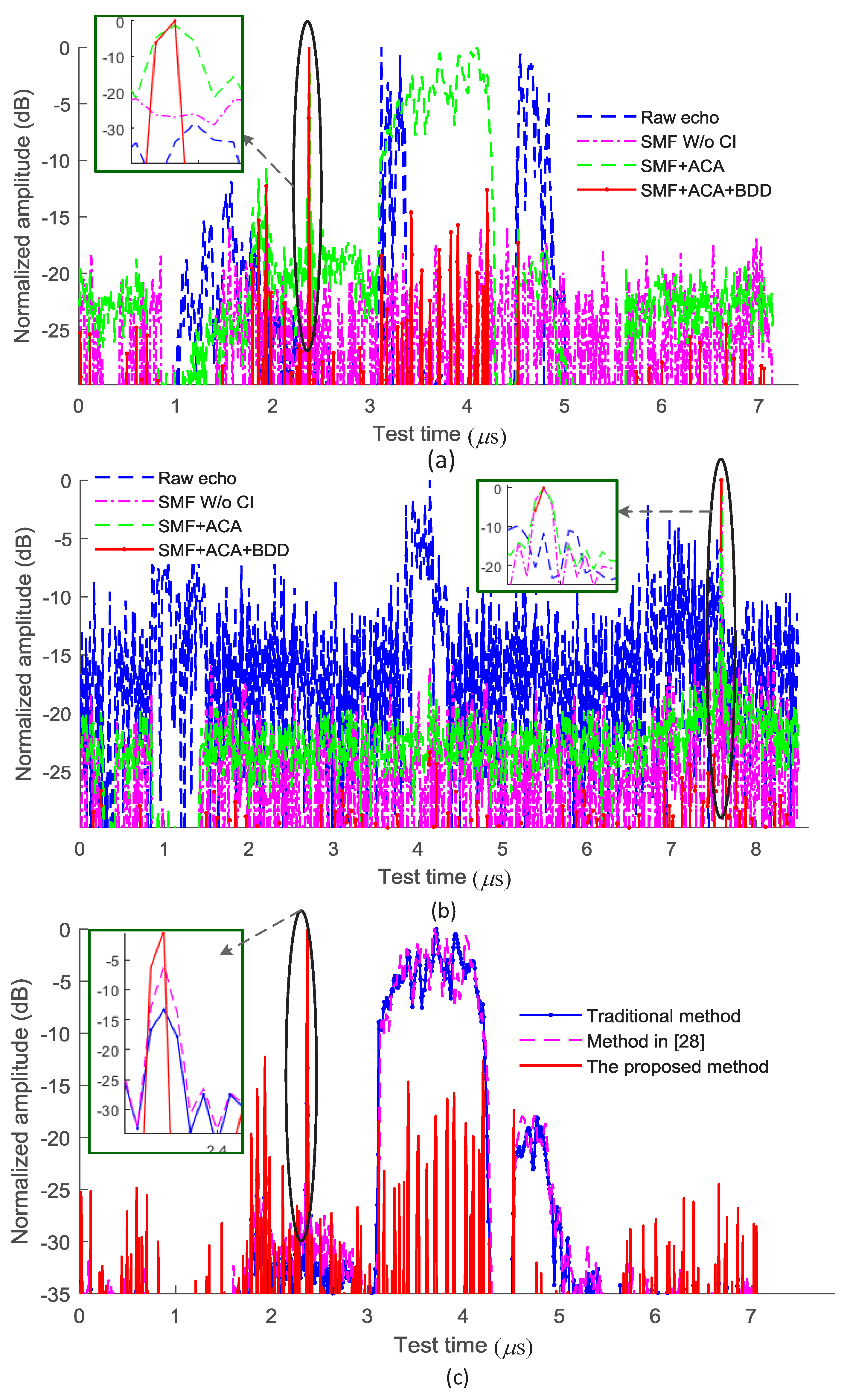
- Enhance the differences of the target echo and the interference using the BDD technique;
- Step 5
- Obtain the target location by searching the peak position of the echo after post-processing.
4. Experiments and Analysis
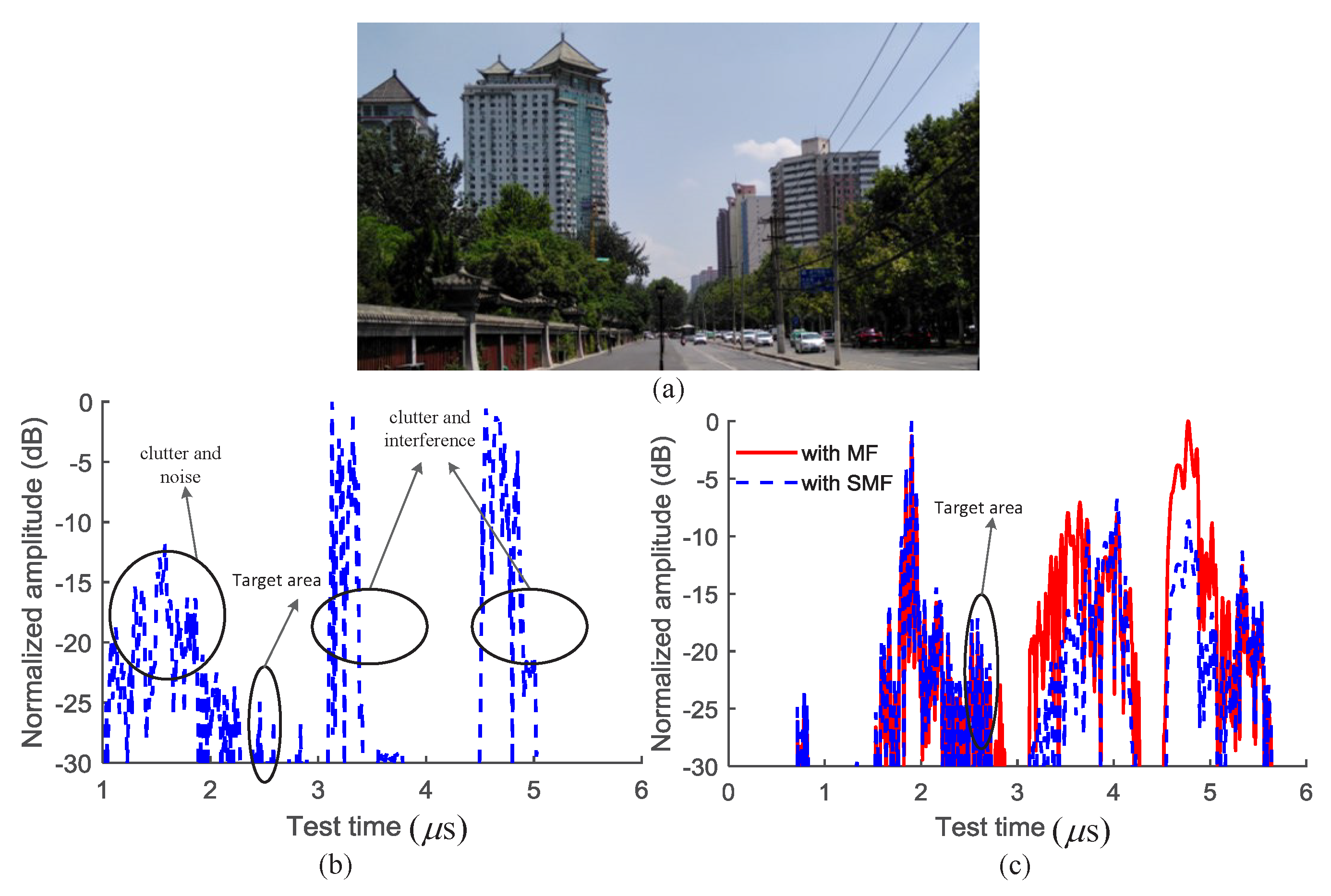
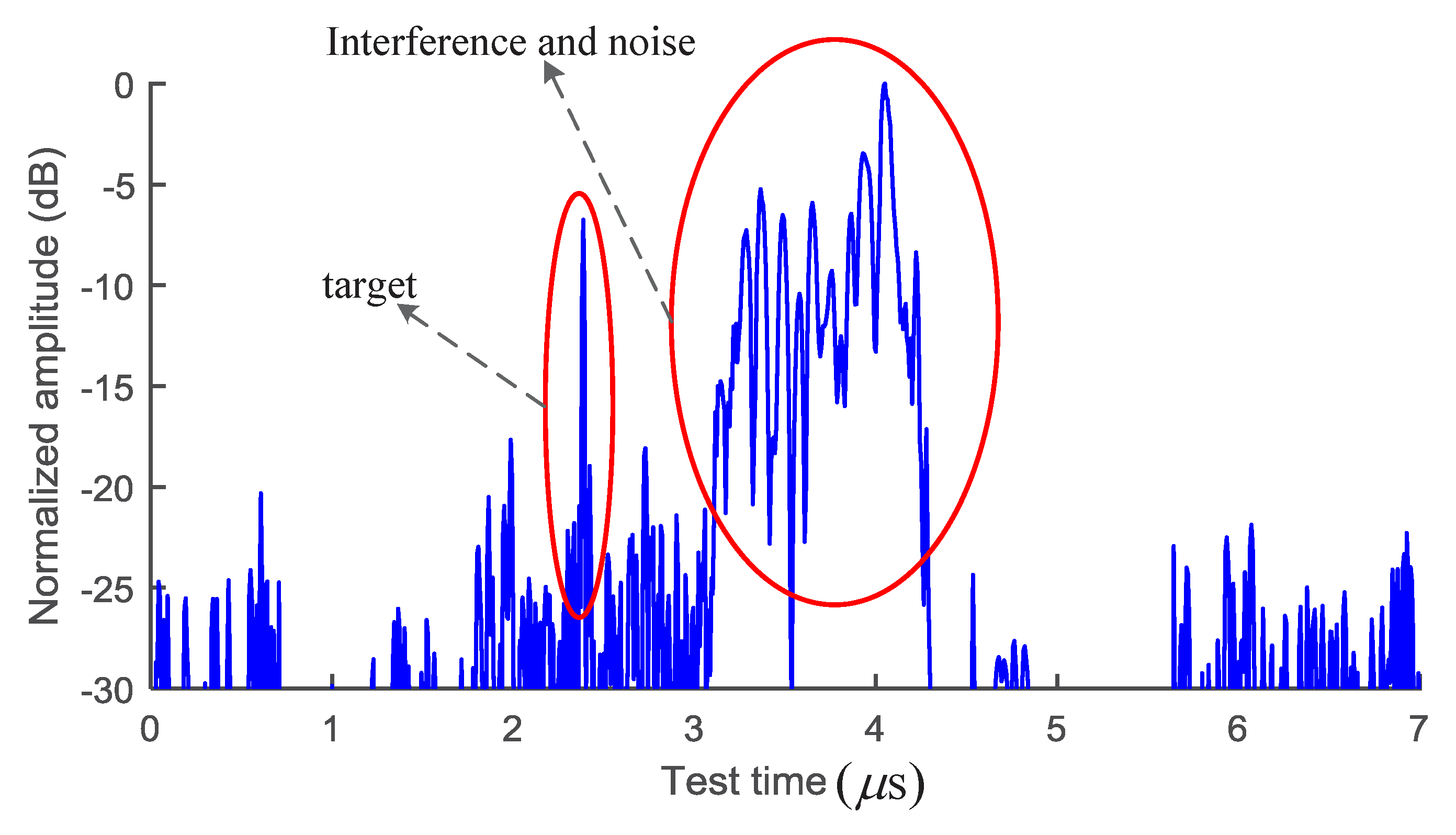
4.1. SMF Technique
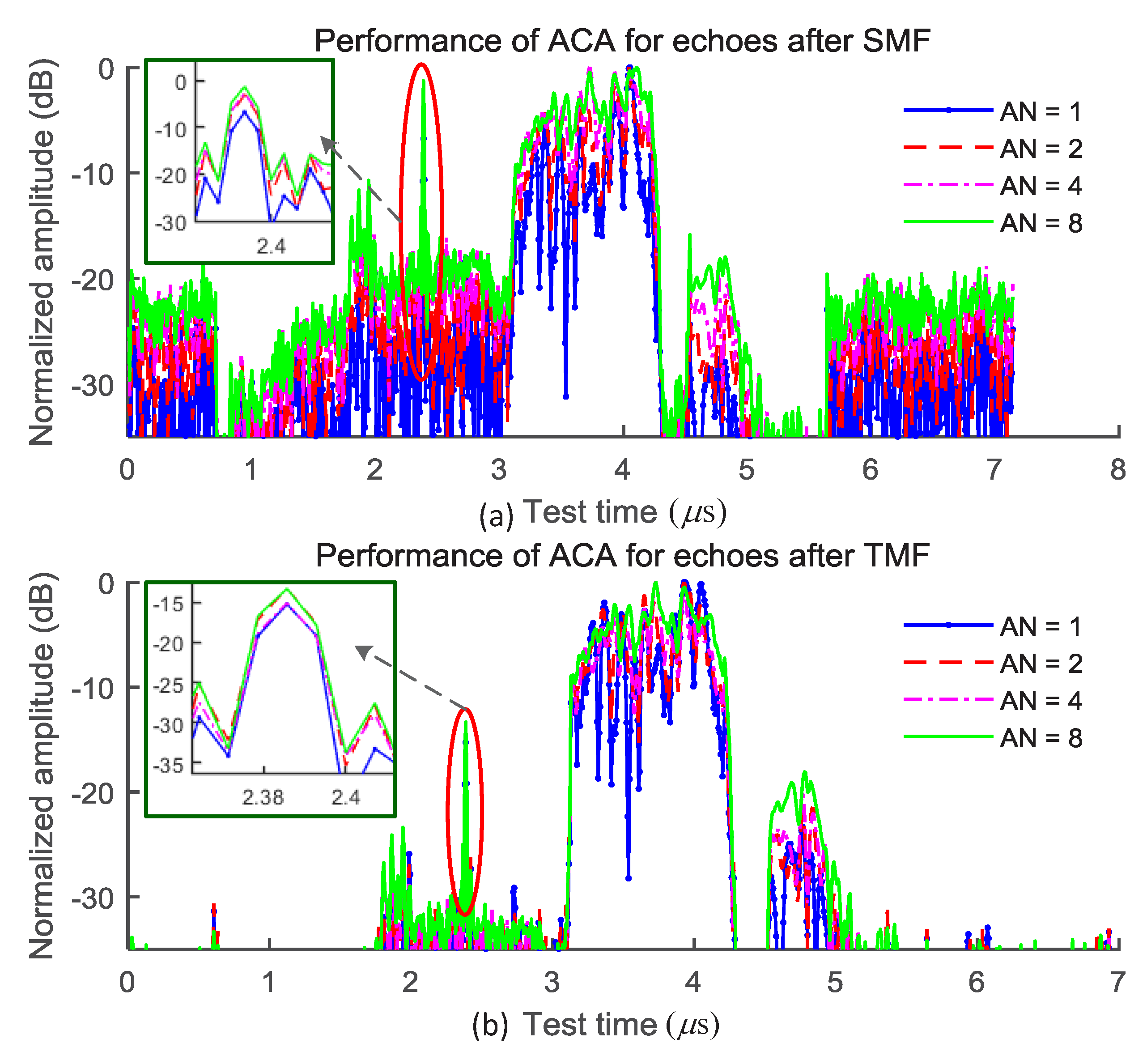
4.2. ACA Method
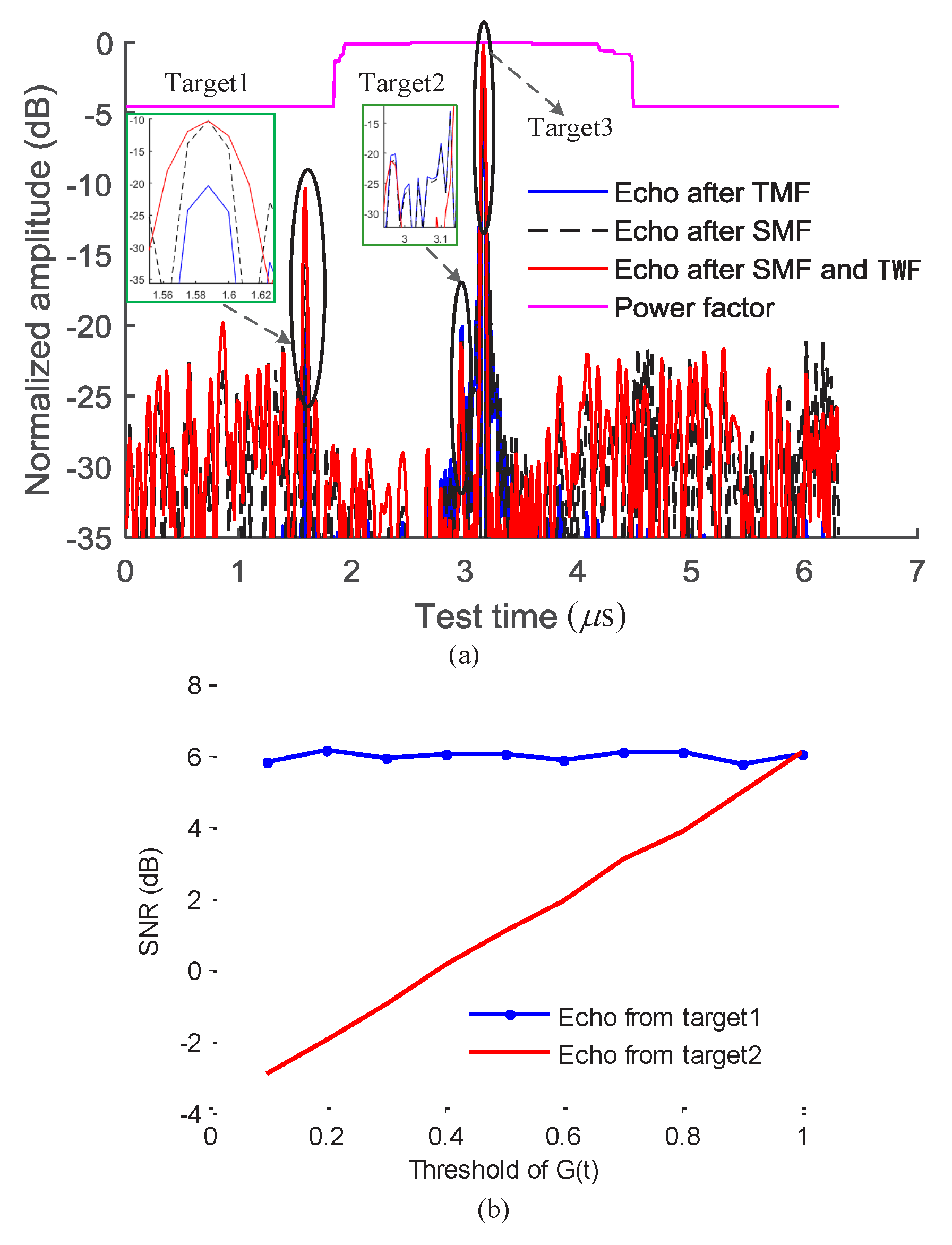
4.3. BDD Technique
4.4. Real Data Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ACA | Amplitude Coherence Accumulation |
| AN | Accumulation Number |
| BDD | Bi-Directional Difference |
| CI | Coherent Interference |
| CPF | Cubic Phase Function |
| LFM | Linear Frequency Modulation |
| MF | Matched Filter |
| SAMTD | Self-Adaption Moving Target Detection |
| SINR | Signal-to-Interference-Noise Ratio |
| SMF | Self-adaption Matched Filter |
| STFT | Short-Time Fourier Transform |
| TF | Time-Frequency |
| TMF | Traditional Matched Filter |
| TSL | Time Side Lobe |
| TWF | Time Window Function |
| WT | Wavelet Transform |
| WVD | Wigner–Ville Distribution |
References
- Cristallini, D.; Pastina, D.; Colone, F.; Lombardo, P. Efficient detection and imaging of moving targets in SAR images based on chirp scaling. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2403–2416. [Google Scholar] [CrossRef]
- Cirillo, L.; Zoubir, A.; Amin, M. Parameter estimation for locally linear fm signals using a time-frequency Hough transform. IEEE Trans. Signal Process. 2008, 56, 4162–4175. [Google Scholar] [CrossRef]
- Lee, D.H.; Shin, J.W.; Do, D.W.; Choi, S.M.; Kim, H.N. Robust LFM target detection in wide-band sonar systems. IEEE Trans. Aerosp. Elect. Systs. 2017, 53, 2399–2412. [Google Scholar] [CrossRef]
- Huang, P.; Liao, G.; Yang, Z.; Xia, X.; Ma, J.; Zhang, X. A fast SAR imaging method for ground moving target using a second-order WVD transform. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1940–1956. [Google Scholar] [CrossRef]
- Wu, Y.; Li, X. Elimination of cross-terms in the Wigner–Ville distribution of multi-component LFM signals. IET Signal Process. 2017, 11, 657–662. [Google Scholar] [CrossRef]
- Avargel, Y.; Cohen, I. Adaptive nonlinear system identification in the short-time Fourier transform domain. Signal Process. 2009, 57, 3891–3904. [Google Scholar] [CrossRef]
- Sun, K.; Jin, T.; Yang, D. An Improved Time-Frequency Analysis Method in Interference Detection for GNSS Receivers. Sensors 2015, 15, 9404–9426. [Google Scholar] [CrossRef] [PubMed]
- Waldspurger, I. Phase retrieval for wavelet transforms. IEEE Trans. Inf. Theory 2017, 63, 2993–3009. [Google Scholar] [CrossRef]
- Staszewski, W.J.; Worden, K.; Tomlinson, G.R. Time-frequency analysis in gearbox fault detection using the Wigner-Ville distribution and pattern recognition. Mech. Syst. Signal Process. 1997, 11, 673–692. [Google Scholar] [CrossRef]
- Shui, P.; Shang, H.; Zhao, Y. Instantaneous frequency estimation based on directionally smoothed pseudo-Wigner-Ville distribution bank. IET Radar Sonar Navig. 2007, 1, 317–325. [Google Scholar] [CrossRef]
- Bouchikhi, A.; Boudraa, A.; Cexus, J.; Chonavel, T. Analysis of multicomponent LFM signals by Teager Huang-Hough transform. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 1222–1233. [Google Scholar] [CrossRef] [Green Version]
- Barma, S.; Chen, B.W.; Ji, W.; Rho, S.; Chou, C.H.; Wang, J.F. Detection of the Third Heart Sound Based on Nonlinear Signal Decomposition and Time–Frequency Localization. IEEE Trans. Biomed. Eng. 2016, 63, 1718–1727. [Google Scholar] [CrossRef] [PubMed]
- Jain, P.; Pachori, R.B. An iterative approach for decomposition of multi-component non-stationary signals based on eigenvalue decomposition of the Hankel matrix. J. Frankl. Inst. 2015, 352, 4017–4044. [Google Scholar] [CrossRef]
- Li, Y.; Yang, Y.; Zhu, X. Target detection in sea clutter based on multifractal characteristics after empirical mode decomposition. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1547–1551. [Google Scholar] [CrossRef]
- Gómez, S.; Naranjo, V.; Miralles, R. Removing interference components in time–frequency representations using morphological operators. J. Vis. Commun. Image Represent. 2011, 22, 401–410. [Google Scholar] [CrossRef] [Green Version]
- Khan, N.A.; Sandsten, M. Time-frequency image enhancement based on interference suppression in Wigner-Ville distribution. Signal Process. 2016, 127, 80–85. [Google Scholar] [CrossRef]
- Ma, N.; Wang, J.X. Dynamic threshold for SPWVD parameter estimation based on Otsu algorithm. J. Syst. Eng. Electron. 2013, 24, 919–924. [Google Scholar] [CrossRef]
- Serbes, A. On the Estimation of LFM Signal Parameters: Analytical Formulation. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 848–860. [Google Scholar] [CrossRef]
- Cathcart, J.; Doll, T.; Schmieder, D. Target detection in urban clutter. IEEE Trans. Syst. Man Cybern. Syst. 1989, 19, 1242–1250. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, T.; Peng, F.; Wang, X.; Wei, Y. Morphology-based building target detection from forward-looking infrared imagery in dense urban areas. IEEE Trans. Aerosp. Electron. Syst. Mag. 2012, 27, 6–17. [Google Scholar] [CrossRef]
- Wu, W.; Guo, H.; Li, X. Man-Made Target Detection in Urban Areas Based on a New Azimuth Stationarity Extraction Method. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 1138–1146. [Google Scholar] [CrossRef]
- Zhang, Y.; Song, B.; Du, X.; Guizani, M. Urban Area Man-Made Target Detection for PolSAR Data Based on a Nonzero-Mean Statistical Model. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1782–1786. [Google Scholar]
- Wu, W.; Guo, H.; Li, X. Vehicle Tracking Using Surveillance With Multimodal Data Fusion. IEEE Trans. Intell. Transp. Syst. 2018, 19, 2353–2361. [Google Scholar]
- Yebes, J.J.; Bergasa, L.M.; García-Garrido, M. Visual Object Recognition with 3D-Aware Features in KITTI Urban Scenes. Sensors 2015, 15, 9228–9250. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Krichene, H.; Brawley, E.; Lauritzen, K.; Wu, A. Time sidelobe correction of hardware errors in stretch processing. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 637–647. [Google Scholar] [CrossRef]
- Zhang, Y.; Hong, R.; Pan, P.; Deng, Z.; Liu, Q. Frequency-domain range sidelobe correction in stretch processing for wideband LFM radars. IEEE Trans. Aerosp. Electron. Syst. 2017, 35, 111–121. [Google Scholar] [CrossRef]
- Wang, P.; Li, H.B.; Djurovic, I.; Himed, B. Integrated cubic phase function for linear FM signal analysis. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 963–977. [Google Scholar] [CrossRef]
- Li, D.; Gui, X.G.; Liu, H.Q.; Su, J.; Xiong, H. An ISAR imaging algorithm for maneuvering targets with low SNR based on parameter estimation of multicomponent quadratic FM signals and nonuniform FFT. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 5688–5702. [Google Scholar] [CrossRef]
- Yin, Q.; Shen, L.; Lu, M.; Wang, X.; Liu, Z. Selection of optimal window length using STFT for quantitative SNR analysis of LFM signal. IEEE Trans. Geosci. Remote Sens. 2013, 24, 26–35. [Google Scholar] [CrossRef]
- He, R.; Li, Q.; Ai, B.; Geng, Y.L.; Molisch, A.F.; Kristem, V.; Zhong, Z.; Yu, J. A Kernel-power-density based algorithm for channel multipath components clustering. IEEE Trans. Wirel. Commun. 2017, 16, 7138–7151. [Google Scholar] [CrossRef]
- Pang, C.; Han, Y.; Hou, H.; Liu, S.; Zhang, N. Micro-Doppler Signal Time-Frequency Algorithm Based on STFRFT. Sensors 2016, 16, 1559. [Google Scholar] [CrossRef] [PubMed]
- Guan, K.; Zhong, Z.; Ai, B.; He, R.; Chen, B.; Li, Y.; Briso-Rodriguez, C. Complete Propagation Modeling in Tunnels. IEEE Antennas Wirel. Propag. Lett. 2013, 12, 741–744. [Google Scholar] [CrossRef]
- Wang, B.; Xu, S.; Wu, W.; Hu, P.; Chen, Z. Adaptive ISAR Imaging of Maneuvering Targets Based on a Modified Fourier Transform. Sensors 2018, 18, 1370. [Google Scholar] [CrossRef] [PubMed]
- Mohamed, A.; John, B.; Behrouz, F. Performance Analysis of Matched Filter Bank for Detection of Linear Frequency Modulated Chirp Signals. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 41–54. [Google Scholar]
- Guan, K.; Li, G.; Kürner, T.; Molisch, A.F.; Peng, B.; He, R.; Hui, B.; Kim, J.; Zhong, Z. On Millimeter Wave and THz Mobile Radio Channel for Smart Rail Mobility. IEEE Trans. Veh. Technol. 2017, 66, 5658–5674. [Google Scholar] [CrossRef]







© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, S.; Chen, X.; Pan, X.; Dong, X.; Shi, H.; Zhang, A.; Xu, Z. Self-Adaption Matched Filter and Bi-Directional Difference Method for Moving Target Detection. Sensors 2018, 18, 3177. https://doi.org/10.3390/s18103177
Zhu S, Chen X, Pan X, Dong X, Shi H, Zhang A, Xu Z. Self-Adaption Matched Filter and Bi-Directional Difference Method for Moving Target Detection. Sensors. 2018; 18(10):3177. https://doi.org/10.3390/s18103177
Chicago/Turabian StyleZhu, Shitao, Xiaoming Chen, Xuehan Pan, Xiaoli Dong, Hongyu Shi, Anxue Zhang, and Zhuo Xu. 2018. "Self-Adaption Matched Filter and Bi-Directional Difference Method for Moving Target Detection" Sensors 18, no. 10: 3177. https://doi.org/10.3390/s18103177
APA StyleZhu, S., Chen, X., Pan, X., Dong, X., Shi, H., Zhang, A., & Xu, Z. (2018). Self-Adaption Matched Filter and Bi-Directional Difference Method for Moving Target Detection. Sensors, 18(10), 3177. https://doi.org/10.3390/s18103177