1. Introduction
Recent population growth in urban areas negatively affects vehicle traffic in city centers. In addition to the negative impact on the environment, finding a vacant space in parking lots during peak hours may be almost impossible. Shoup reports that, based on the sample of 22 studies performed in 11 cities (Detroit, Washington, New Haven, London, Freiburg, Jerusalem, Cambridge, Cape Town, New York, San Francisco, and Sydney) between 1927 and 2001, drivers spend on average eight minutes finding a vacant space [
1]. Naturally, cruising time may vary, numerous studies performed in European cities (Netherland, Belgium) report average cruise time for on-street parking of 30 s and off-street parking 50 s [
2].
Systems able to manage this problem can be categorized into counter-based, sensor-based, and image or video based. The first two categories have a couple of drawbacks: counter-based systems could help only with information about a total number of vacant spaces, a sensor-based system costs a lot because of the number of sensors required to cover the entire parking lot. However, the third category is usually considered as quite expensive and producing a significant amount of data, which are unable to transmit over the wireless network, the growth in low-cost, low-power sensing and communication technologies enables a wide range of physical objects and environments to be monitored in fine spatial and temporal detail. A network of dedicated low-power devices connected to the cloud then could be part of the Internet of Things (IoT) platform for smart cities [
3].
The oldest video systems for automatic detection of vacant parking spaces were based on a simple calculation of the differences between consecutive frames [
4]. Motion detection is not cost-effective because of the need to process large amounts of redundant data. The system requires continuous image acquisition, which does not provide room for any energy savings. Although systems using temporal characteristics are not efficient, their accuracy may be relatively high, as shown by recent works [
5,
6]. All the below-mentioned approaches do not consider the temporal link between the consecutive frames and solve each image individually.
The system described in [
7] is computationally less demanding. The system determines decision about occupancy from the ratio of the number of edges calculated by Laplace’s operator in the defined areas. The authors report an accuracy of over 95% for one test sequence of a parking lot with 53 parking spaces. The robustness of the classification algorithm is, however, quite low when conditions are worse. Delibatov et al., [
8] model a parking slot as a volume in the 3D space. This approach eliminates problems with overlaps. Parking spaces are semi-automatically marked and then modeled by the probability density that a pixel is part of the parking space. For detection, a rotationally invariant local binary pattern (LBP) descriptor with a support vector machine (SVM) classifier with a nonlinear core is used. The LBP-SVM classifier works on small blocks that can be classified as one of six classes: cars, land, trees, skies, buildings and the rest. The final result of the occupancy of the parking space is obtained by the weighted sum of the results of the block classification where the scales are given by the models of parking spaces.
A number of works are focused on testing of the algorithms’ robustness. De Almeida et al., [
9] verify the usability of texture descriptors based on LBP and local phase quantization (LPQ) descriptors using the SVM classifier. The authors showed an accuracy of 99% when the classification algorithm was tested on the same view of the car park as it was trained. If a different view of the car park was selected for training, they reached an accuracy of around 89%. Algorithms were tested on the PKlot [
10] database of almost 700,000 samples.
In addition to the descriptors already mentioned, there are works employing wavelet transform [
11], scale-invariant feature transform (SIFT) [
12], histogram of oriented gradients (HOG) [
13,
14], integral channel features [
15], or Hue histogram descriptor [
16]. Fusek et al., used AdaBoost based algorithm and also compared such approach with HOG descriptor [
17].
From the point of view of reliability, it is worth mentioning the works focused on Convolutional Neural Networks (CNN). Amato et al., [
18] describes the system using deep learning with accuracy better than 90%. CNN was trained to directly decide about the occupancy status of the individual parking spaces seen by the video cameras. The authors used the CNRPark dataset [
19] consisting of roughly 12.000 labeled images and the CNRPark-EXT dataset including 150.000 labeled samples. Classification of one parking space takes around 300 ms Raspberry Pi model B.
The paper is organized as follows.
Section 2 is dedicated to some aspects of camera systems design and
Section 3 introduces proposed system.
Section 4 discussed results including comparions with some already published papers and
Section 5 describes real-world scenarios.
Section 6 concludes the paper.
2. Design of Camera System
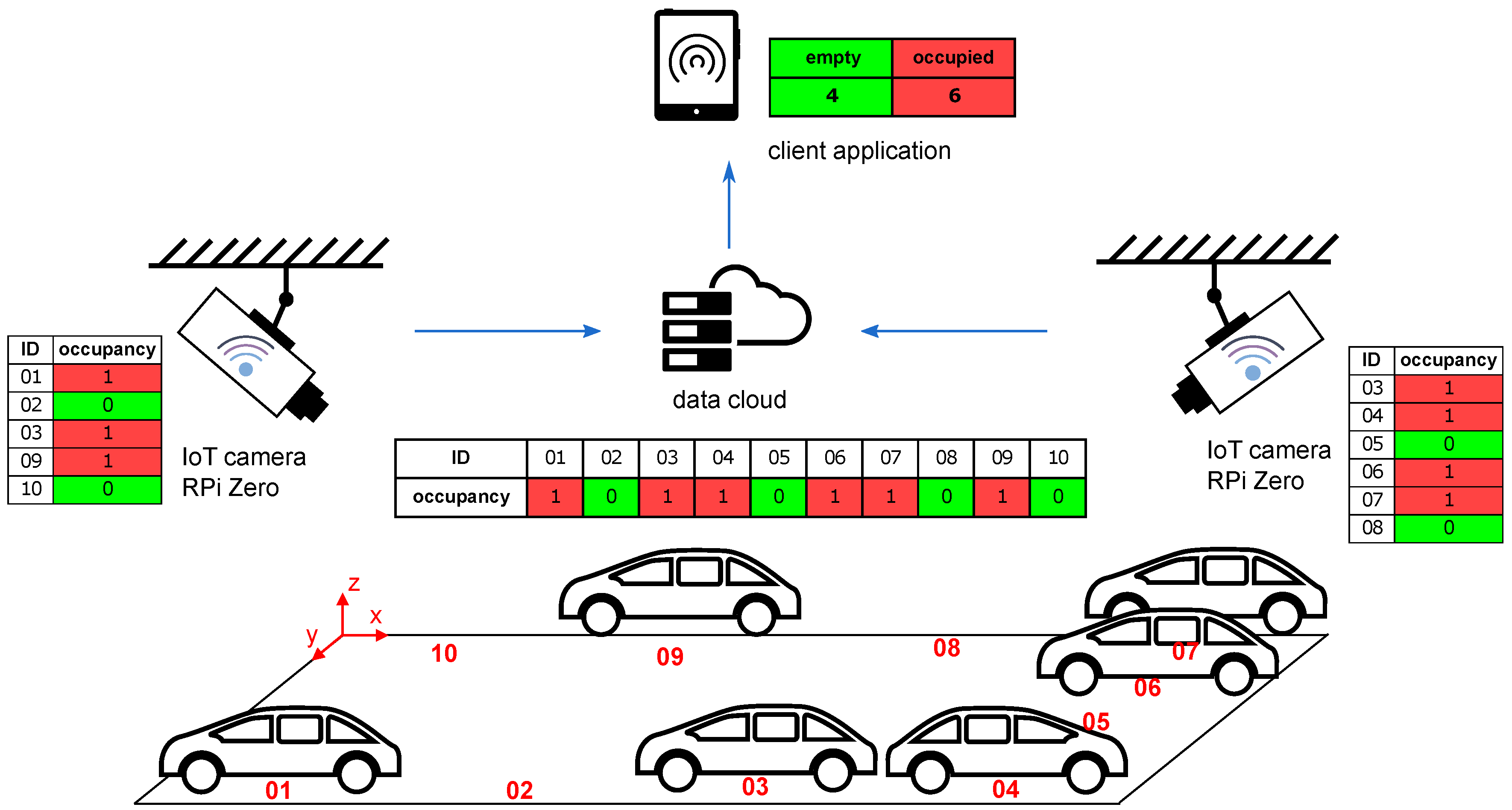
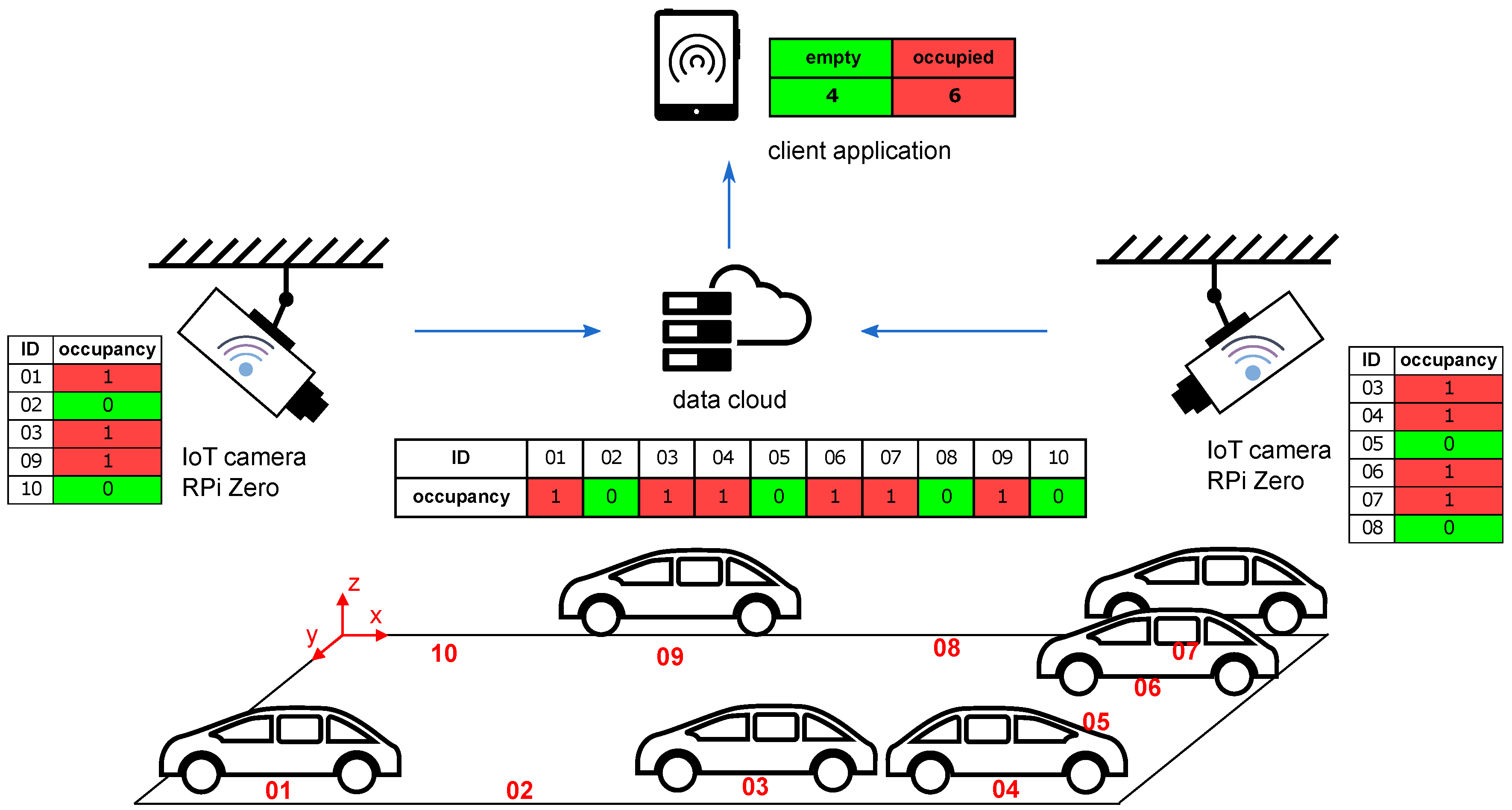
In this paper, we will focus on wireless camera systems. A typical arrangement of such a system can be seen in
Figure 1. The first camera covers parking spaces 01, 02, 03, 09, and 10; the second camera covers parking spaces 03, 04, 05, 06, 07, and 08. Information on the occupancy of parking spaces is transferred to the server, which then evaluates the data and transmits it to the end user. In this case, one parking space (03) is visible from both cameras, so there should be an algorithm to solve this overlap. The server also has a database to keep all messages for further analysis.
It is sufficient to describe the occupancy of the single parking space with only 1 bit (0 = vacan/1 = occupied). The transfer of such information (including some error-correcting code) to the central server can be conveniently implemented via any of IoT wireless networks [
20]. For example, the LPWAN (Low-Power Wide-Area Network) Sigfox platform allows users to transmit 96-bit messages 140 times a day, which approximately corresponds to an update interval of 10 min when sending regular messages. Since irregular intervals could better capture the peak situation, the time between messages can be adaptively modified according to the significance of changes in occupancy. Information about the occupancy of parking slots including navigation to the vacant space could be distributed via the Internet, for example using Vehicle-to-vehicle communication [
21].
For wireless cameras, it is also necessary to solve their power supply. Cameras usually consume more energy than simpler sensors, and the design is therefore more complicated. The basic trick to reduce power consumption is the use of sleeping mode with a periodic wake-up. It is not necessary to update the parking capacity at a high sampling frequency, as slower changes are expected. When in sleeping mode, the power consumption of single unit can be minimized to the order of mW, thus significantly prolonging the battery life. Another way to optimize power consumption can be solar panels, which can achieve complete energy self-sufficiency of the camera [
22].
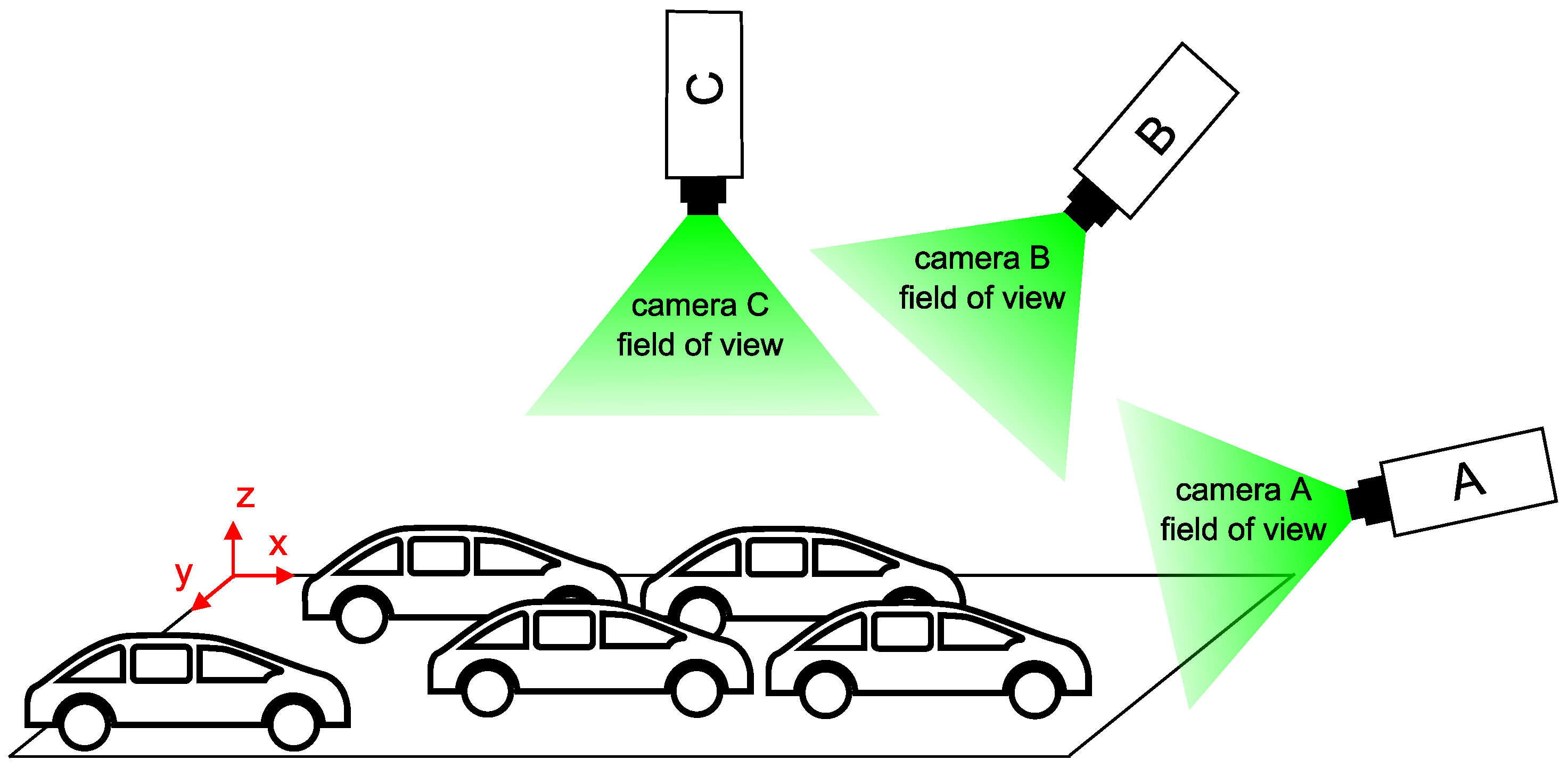
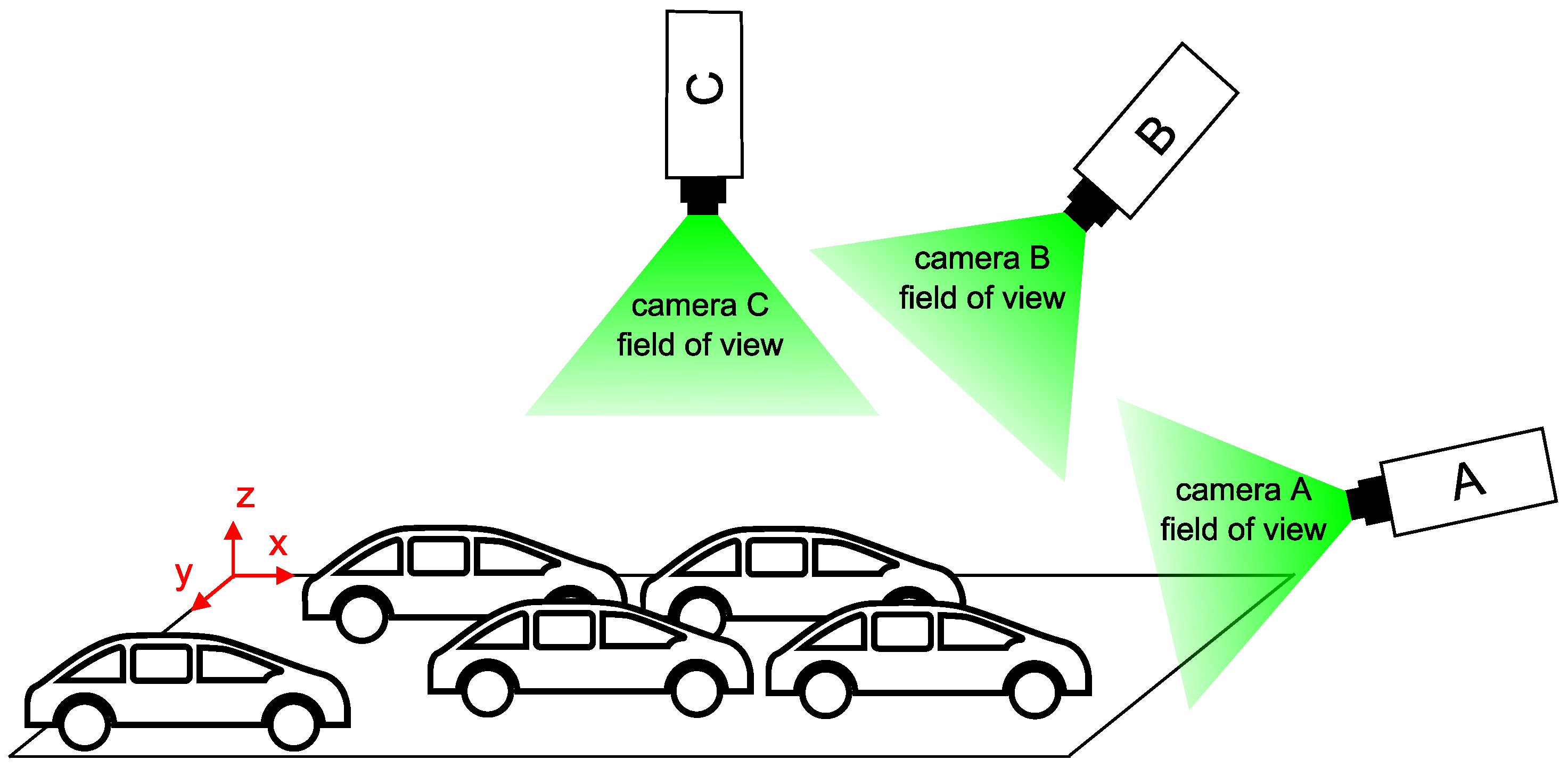
An essential part of the design of camera systems is the consideration of the relative position of the cameras and the sensed objects. It is desirable to find the most efficient solution to maximize the coverage area with the minimum number of cameras. However, the design must take into account further consequences associated with placing the camera in a certain position [
23]. The illustration image (
Figure 2) indicates three different camera positions relative to the plane of the car park. The size of the area and the number of parking spaces to be covered by the camera depends on its location and its field of view. The large FOV usually associated with wide-angle lenses, intruding unwanted geometrical distortions. Camera A can easily cover all the parking spaces but at the cost of overlaps, which make occupancy harder to distinguish. Camera C can capture parking spaces without overlapping, but all of them come into view only when the camera is high above the ground or when using a large FOV lens. There may be overlaps in camera B but not as distinctive as in camera A. Option B seems to be the most advantageous as it is a compromise between the FOV and the overlaps. Moreover, the cameras can be placed on public lighting pillars or nearby buildings.
3. Implementation
Prototypes are based on Raspberry Pi Zero with camera module connected to the CSI-2 interface. Camera module uses CMOS sensors OmniVision OV5647 with a spatial resolution of 2592 × 1944 pixels and lens with focal length of 3.6 mm (FOV is 54 × 41 degrees). As a power supply we used two Li-Io batteries of 3.7 V (2 × 3.7 V × 1800 mAh) and DC-DC step-up converter 5 V/2 A.
The module is equipped with Wi-Fi adapter 802.11 b/g/n and LPWAN SigFox Node UART Modem working at 868 Mhz. While the Wi-Fi interface serves to configure the module, the SigFox modem serves to transmit information about the availability of parking spaces to the central server. Naturally, choice of this IoT communication platform limits the number of parking space that can be managed to approximately 90 (assuming that 6 bits will be used to identify camera module), which is enough for experimental purposes. All image processing tasks are done on Raspberry Pi, extracted information of vacant/occupied parking spaces is then transmitted through a central server to a client application.
3.1. Training Set and Descriptor
Training data are images displaying occupied and free parking spaces. Images were obtained with a camera mounted on a telescopic rod from a height of about 4 m. Overall, about 1000 images were collected in different daytimes and weather conditions. 1120 positive samples and 1378 negative were extracted from these data. After preliminary experiments we considered HOG descriptor as a most suitable and robust solution for our dataset. Test showed that HOG descriptor is highly invariant to light conditions. Extraction of feature vectors using the HOG descriptor requires input data of constant size, so the samples were resampled to the same size, aspect ratio 3:2.
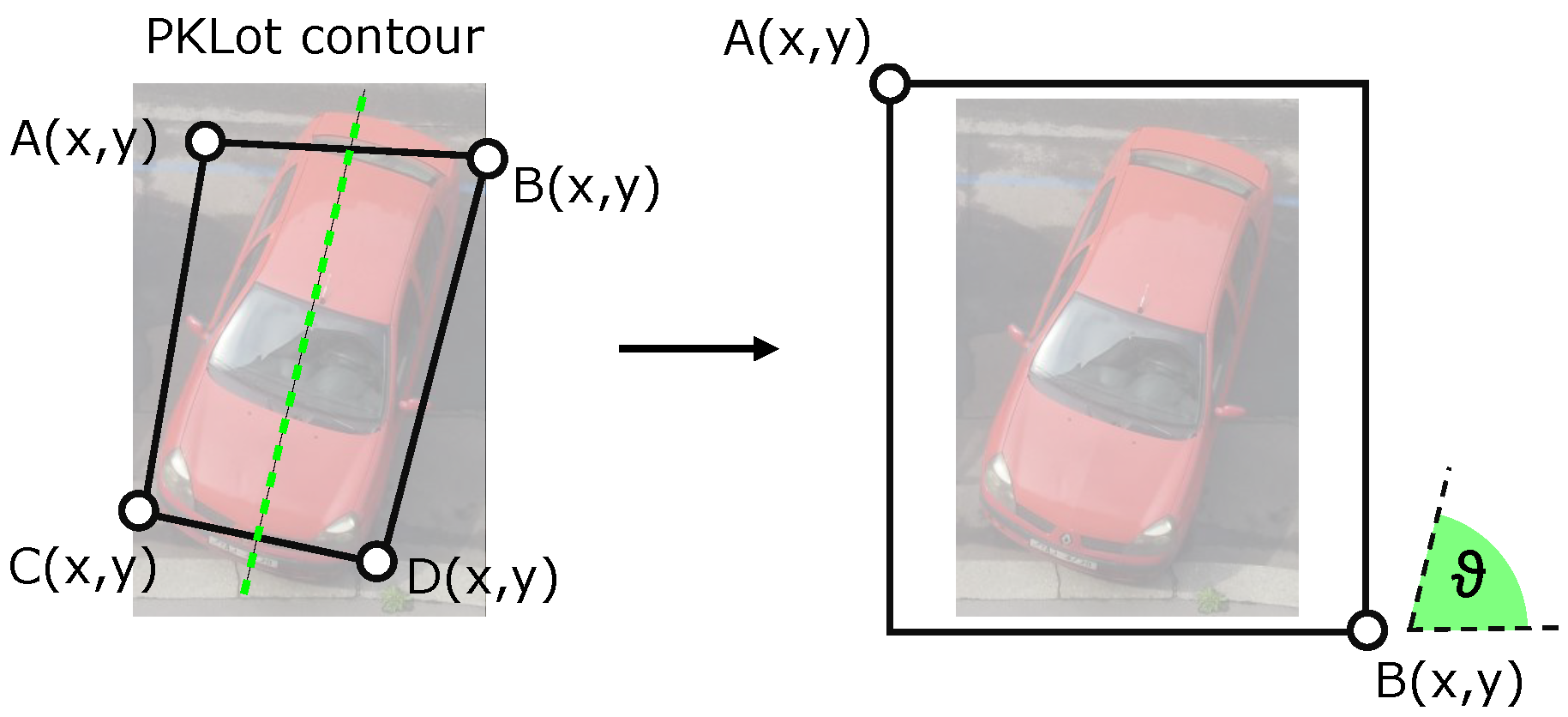
According to our experiments, the standard HOG feature descriptor is not able to adequately describe differently rotated vehicles and produces a high number of false positives. Our findings are supported by work of Fusek et al., [
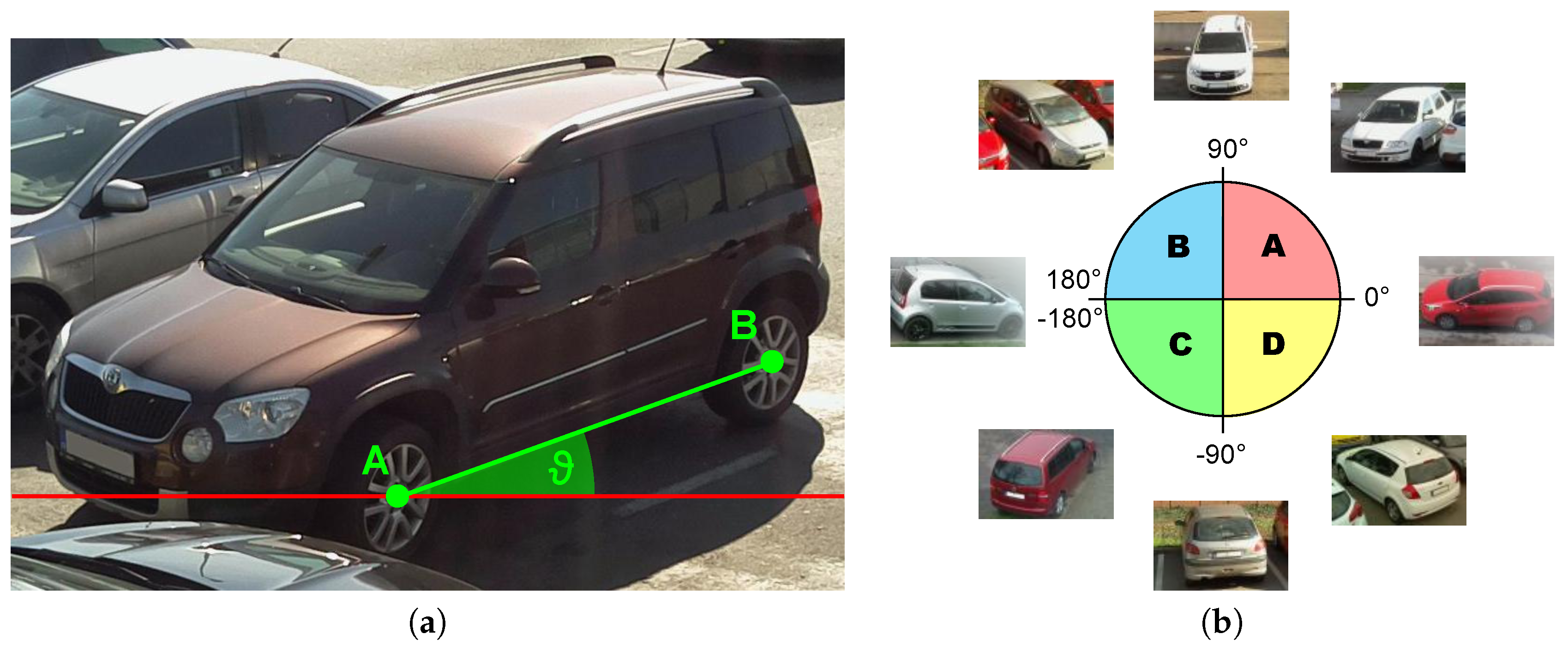
17], where authors report less than 44% accuracy of the HOG based detector. Thus, reasonably use the HOG descriptor requires describing the relative position of the car and the camera. For the purpose, we divided the positive samples into several categories according to the orientation of the car in the picture. The orientation is described by a single value corresponding to the angle between the wheels of the vehicle and the horizontal line.
Figure 3a displays example of the training sample with manually labeled wheels (points
A and
B).
Although this model is very simple, it allows us to very easily distinguish the samples according to the orientation. The angle of the vehicle rotation can yield values from −180–180, but dimensionality can be reduced by adoption of the following simplification:
it is possible to park a vehicle in two ways (for example −90 and 90, or −135 and 45), therefore, the samples corresponding to these angles can be merged;
a typical vehicle is horizontally symmetric, so it is possible to group corresponding samples (for example 135 and 45).
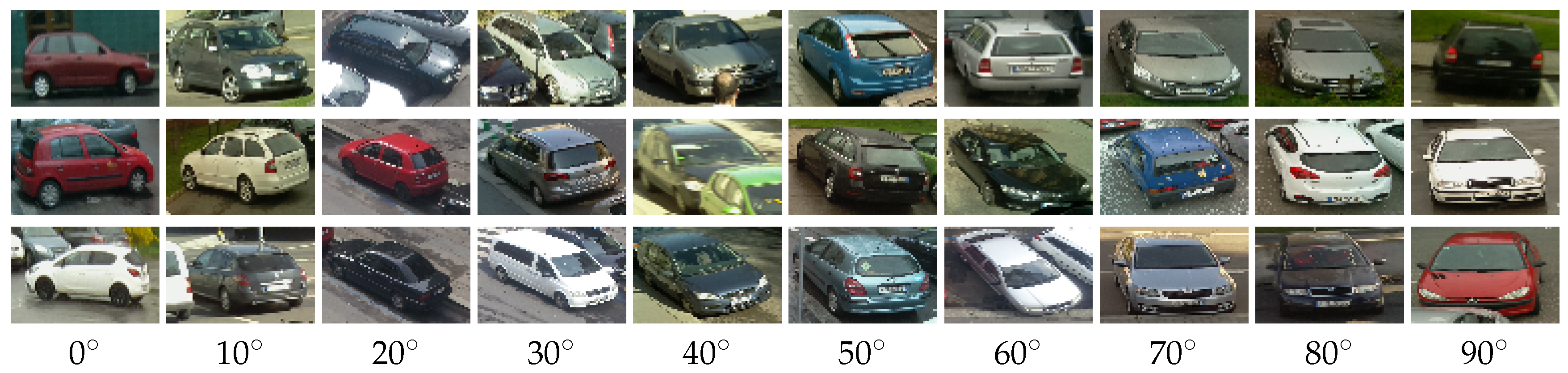
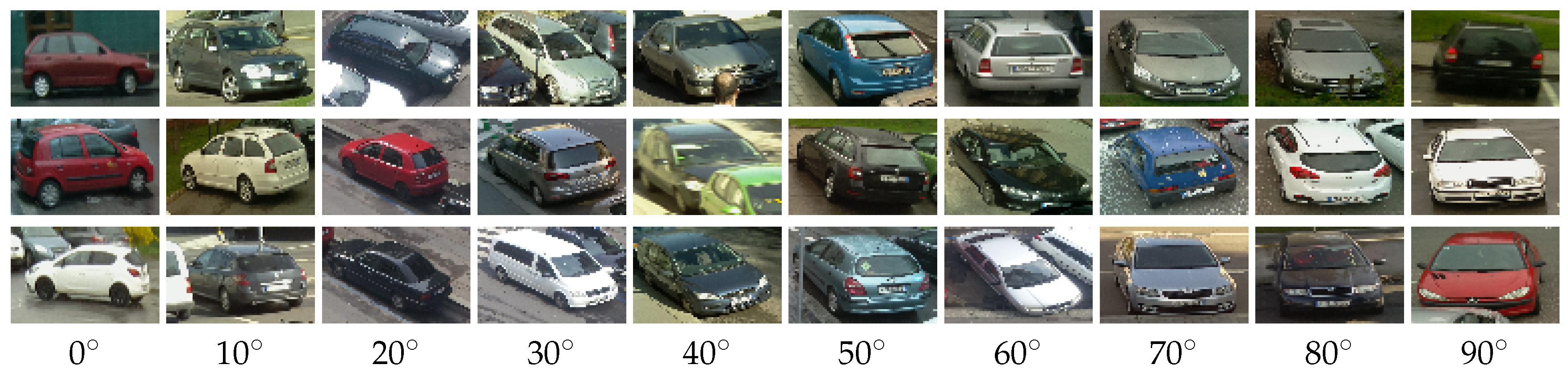
Figure 3b demonstrates the similarity of differently rotated vehicles: quadrants A and B are horizontally symmetric, quadrants A and C represents opposite direction of parking and quadrants A and D show the opposite orientation of the cars in the parking space relative to the horizontal symmetry. Based on this consideration, we have merged positive samples into a single quadrant. After experiments, we resampled samples to the size of 72 × 48 pixels (i.e., feature vector has the length of 1440). This size of the sample was chosen as an optimal size according to the typical size of the car in the field of view of the camera. We divided samples into ten groups, representing vehicle rotations 0
–90
with the step of 10
. For examples see
Figure 4.
3.2. Learning Algorithm
Since our target platform is Raspberry Pi Zero or possibly any other similar low-power platform, the main focus of the implementation is on efficiency and low complexity of used algorithms (i.e., lower usage of computer resources and thus lower power consumption). For this reason, we performed a comparison of popular learning algorithms performance: SVM with linear kernel, Logistic Regression (LR) and Random Forrest (RF). Tests were performed on our dataset described in
Section 4.2, accuracy ACC (ratio between a number of correct classification and a total number of samples), area under ROC (Receiver operating characteristic) and also the average time needed to the classification of one parking space have been investigated. Results are summarized in the
Table 1. The best learning algorithm regarding speed is LR, but this algorithm exhibits bad performance with our dataset. As the best trade-off between computational difficulty and accuracy, we selected SVM. Due to the relatively large size of the feature vector and a small number of samples, the training set data is linearly separable. Thus, the linear kernel is a natural choice.
3.3. Classification of the Parking Space
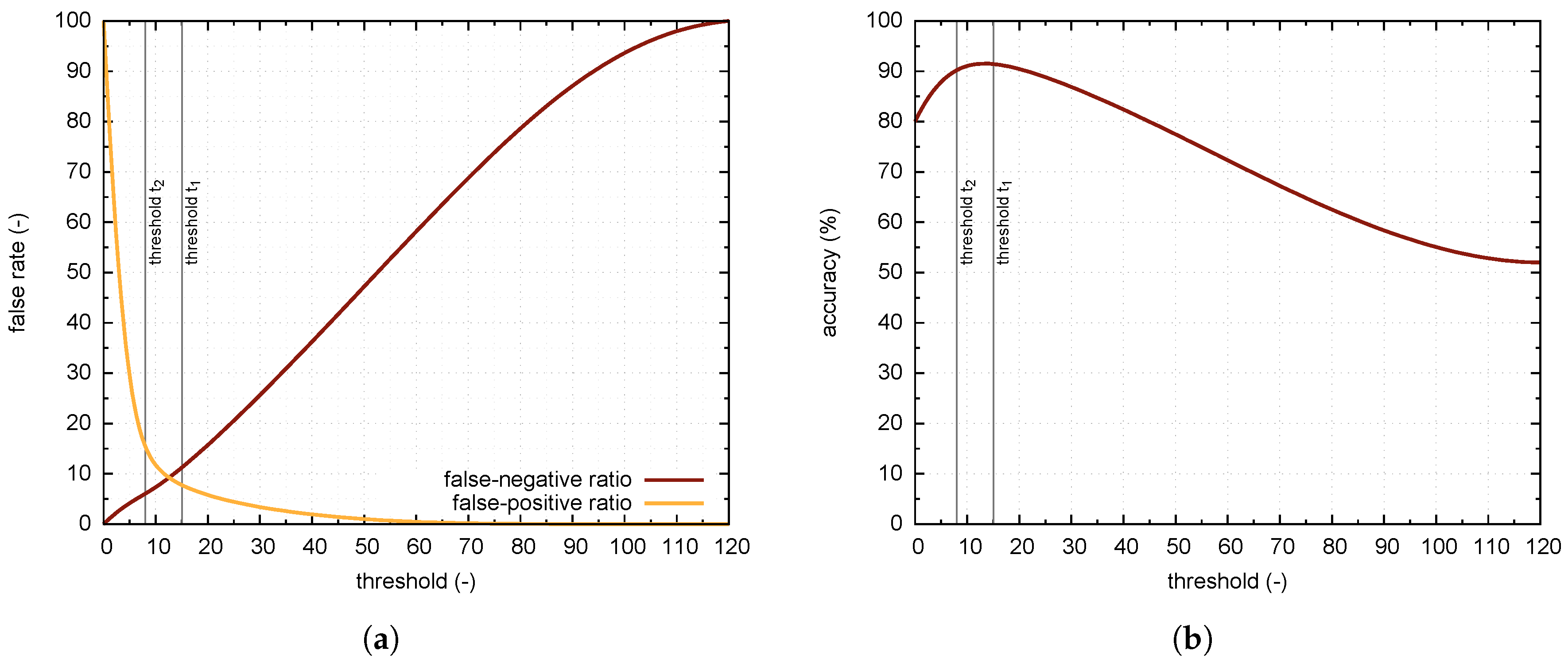
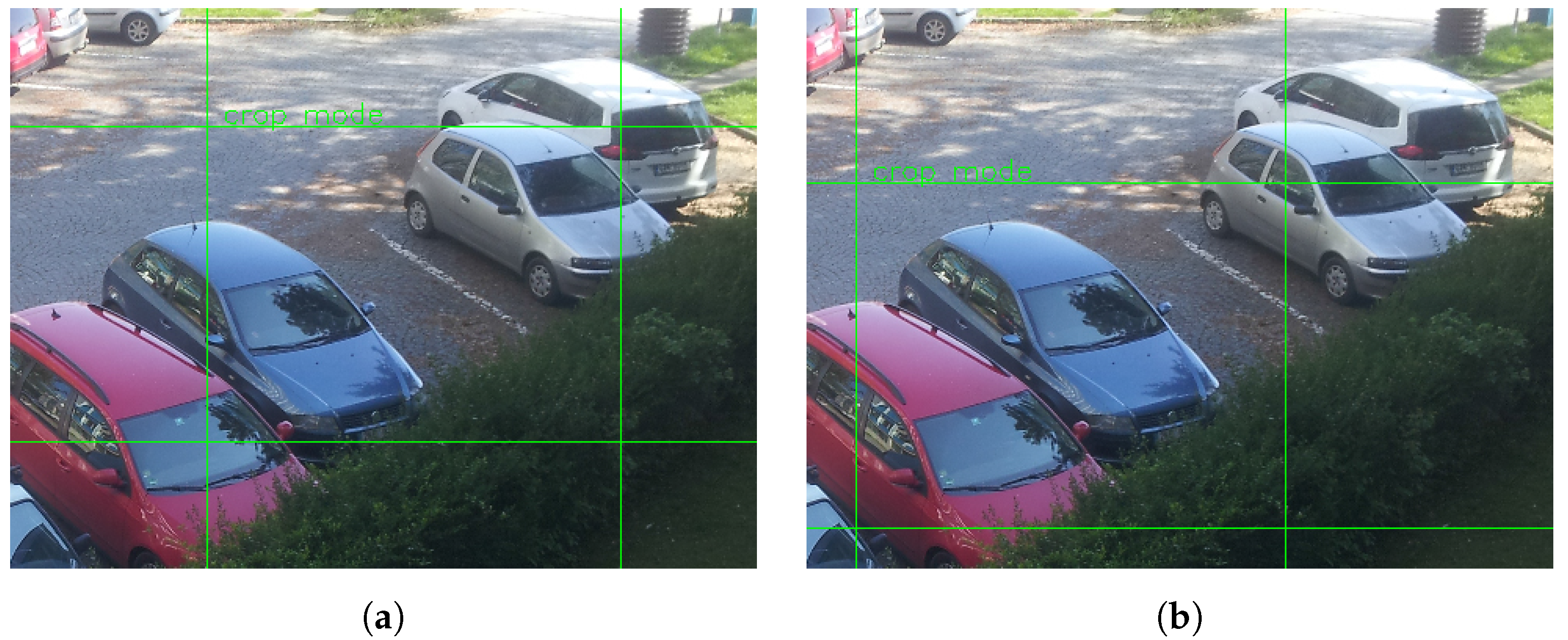
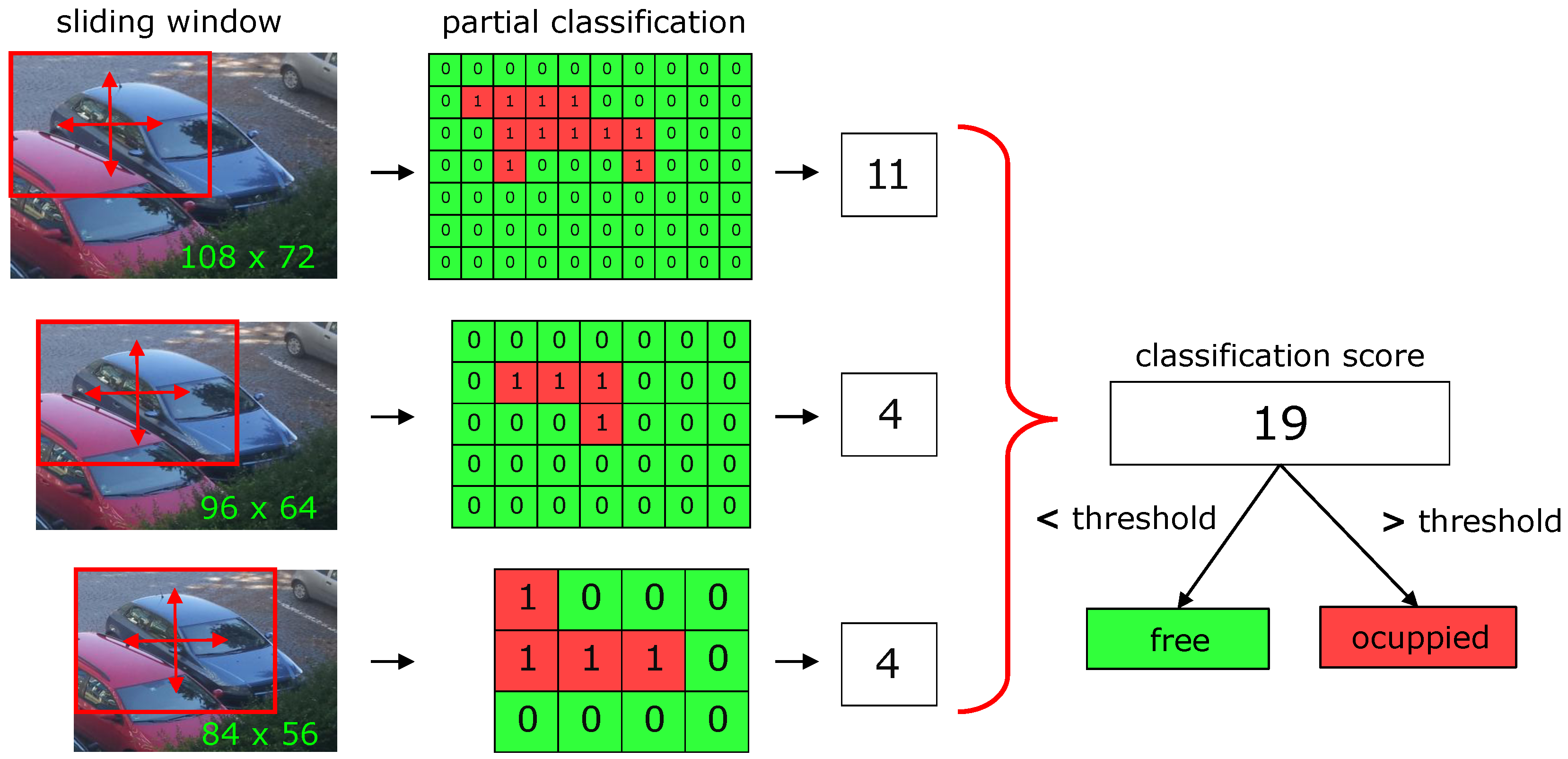
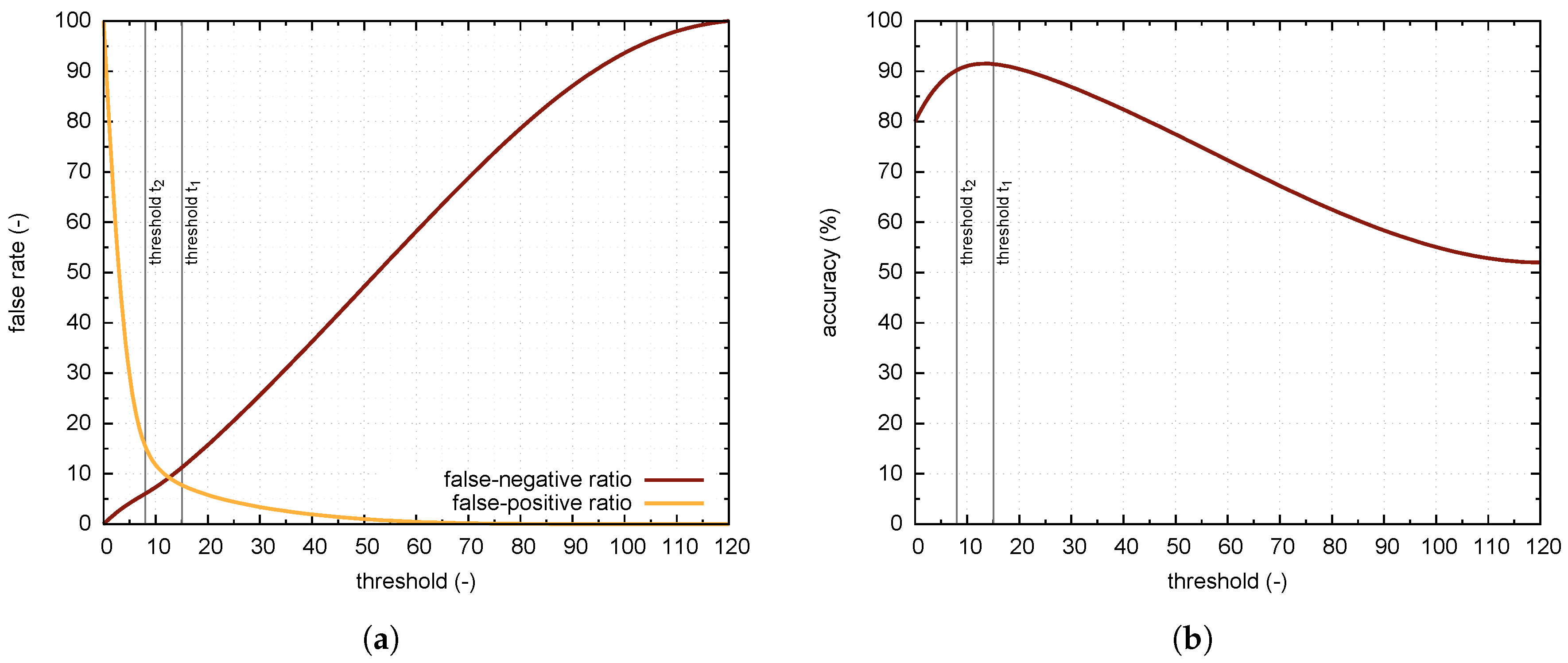
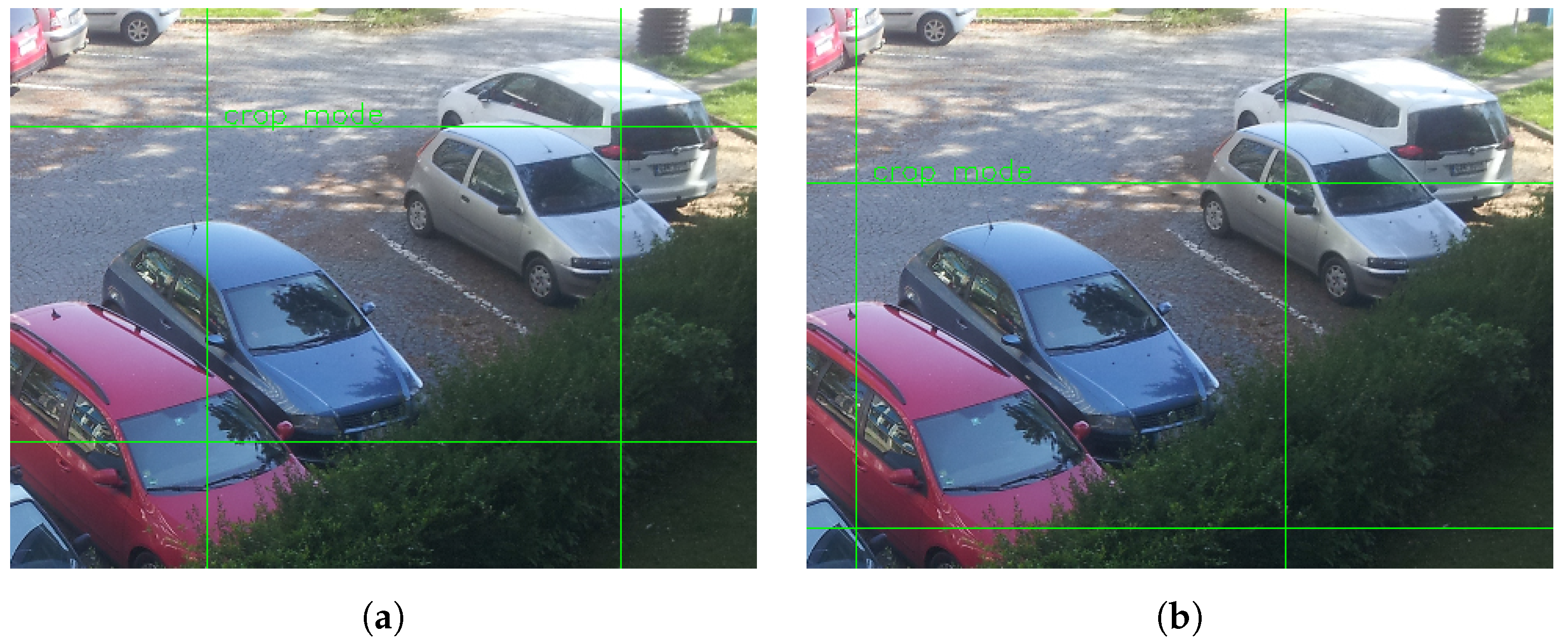
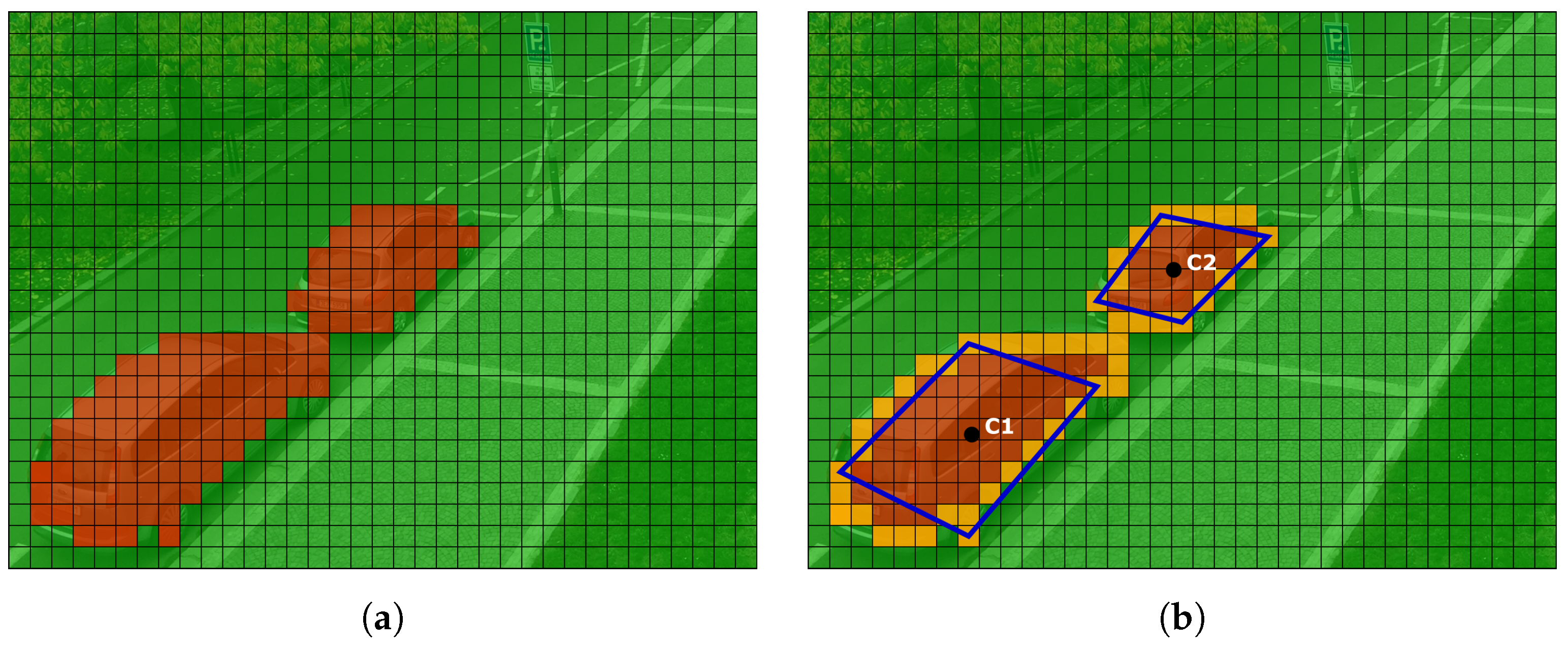
Unlike the training phase, it is not possible to specify the position of the vehicle during classification, since its exact position and size are not known. Thus, the algorithm works with a previously known approximate position of a parking space, which is naturally larger than the vehicle itself. The classification is then carried out using a sliding window in variously resampled copies of the section of the parking area (see
Figure 5). From each copy, a sliding window of size 72 × 48 produces several segments for which the HOG feature vectors are calculated. SVM classification model then predicts the class. If the model classifies the given feature vector as a vehicle, the prediction is equal to one. Otherwise, the prediction value is zero. Summing up the results for all segments produced by sliding window, the algorithm calculates a classification score that is thresholded to obtain the final classification result. The value of the threshold is determined from the statistical analysis, for details see
Section 4. The classification of a single parking space is relatively computationally inexpensive; with Raspberry Pi Zero it takes about 100 ms. Thus, the system can classify about ten parking spaces per second.
If the system uses more cameras with an overlapping field of view, the parking space in the overlay is classified by all cameras. The decisive classification score is the value with the greatest difference from the chosen threshold.
3.4. Power Consumption
The module works with the voltage of 5V. We measured the current consumption of the module during typical actions: idle, dense scanning (classification of single parking space), Wi-Fi connected and SigFox data transmission. For details about current consumption see
Table 2. Note, that the Raspberry Pi Camera Modules require 250 mA to an operation, and the SigFox module has current consumption 65 mA during transmit and 15 mA during receive operation, typical sleep mode current is 2
A. The timing of the actions is determined by the frequency of data transmissions and a number of parking spaces. Assuming that the module is working during the daytime, with the limitation of the SigFox network it is possible to send one message per five minutes. A Wi-Fi interface is switched on during normal operation, and it may be switched on with a command sent over the SigFox network. Peak current occurs when the camera is in action. This is typically 10 s during the above-mentioned five minutes interval (to classify up to 100 parking spaces). The average power consumption of the single module is about 1.5 W during daytime (6 am to 8 pm during the summer).
6. Conclusions
A fast and reliable algorithm designed to run on low-power consumption embedded systems is used to classify images of parking space to recognize if they are occupied or vacant. The extracted information can be used in any application aiming to help drivers to find free parking space. In order to increase the accuracy of the detector based on HOG descriptors and SVM, we have provided a descriptor with additional information about rotation of the vehicle. We also employed dense scanning in three different scales to improve detector performance.
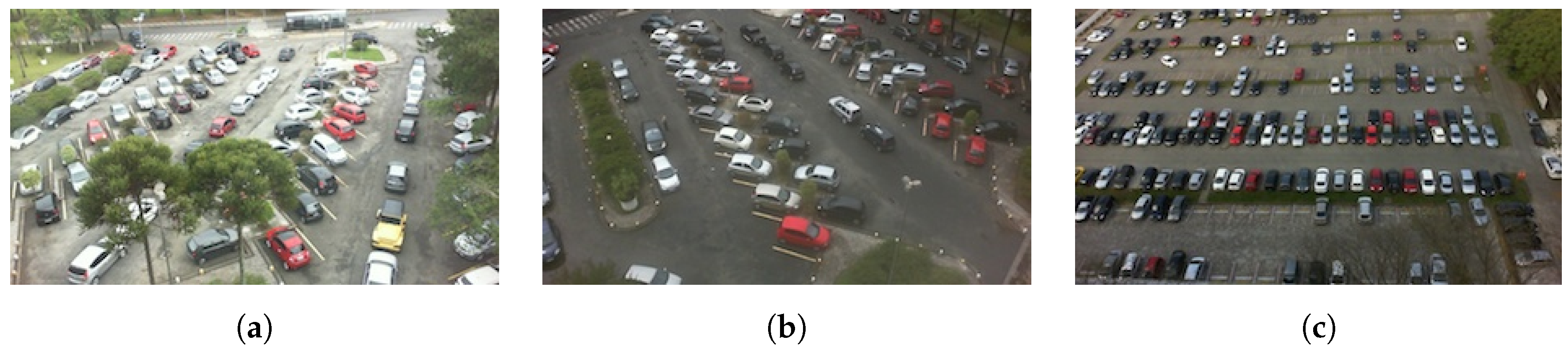
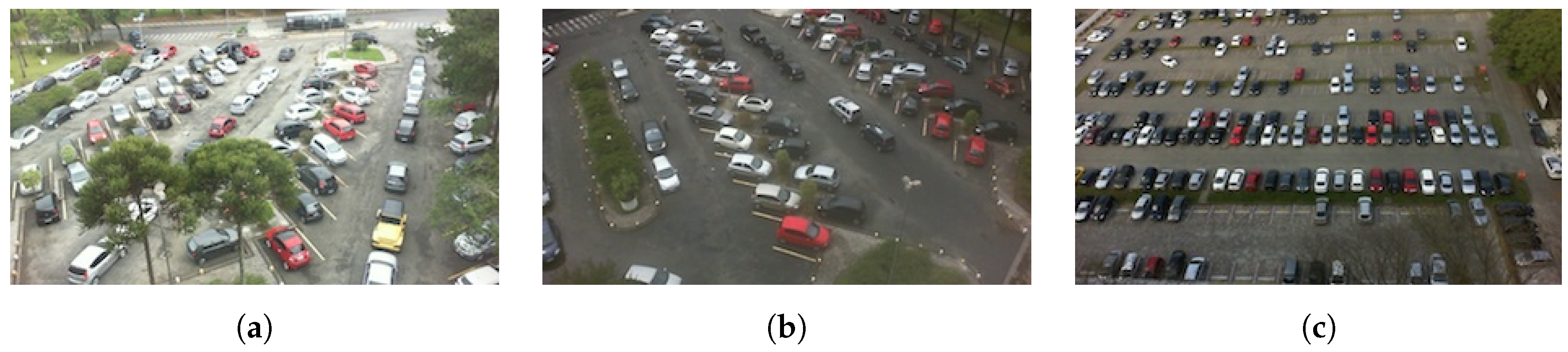
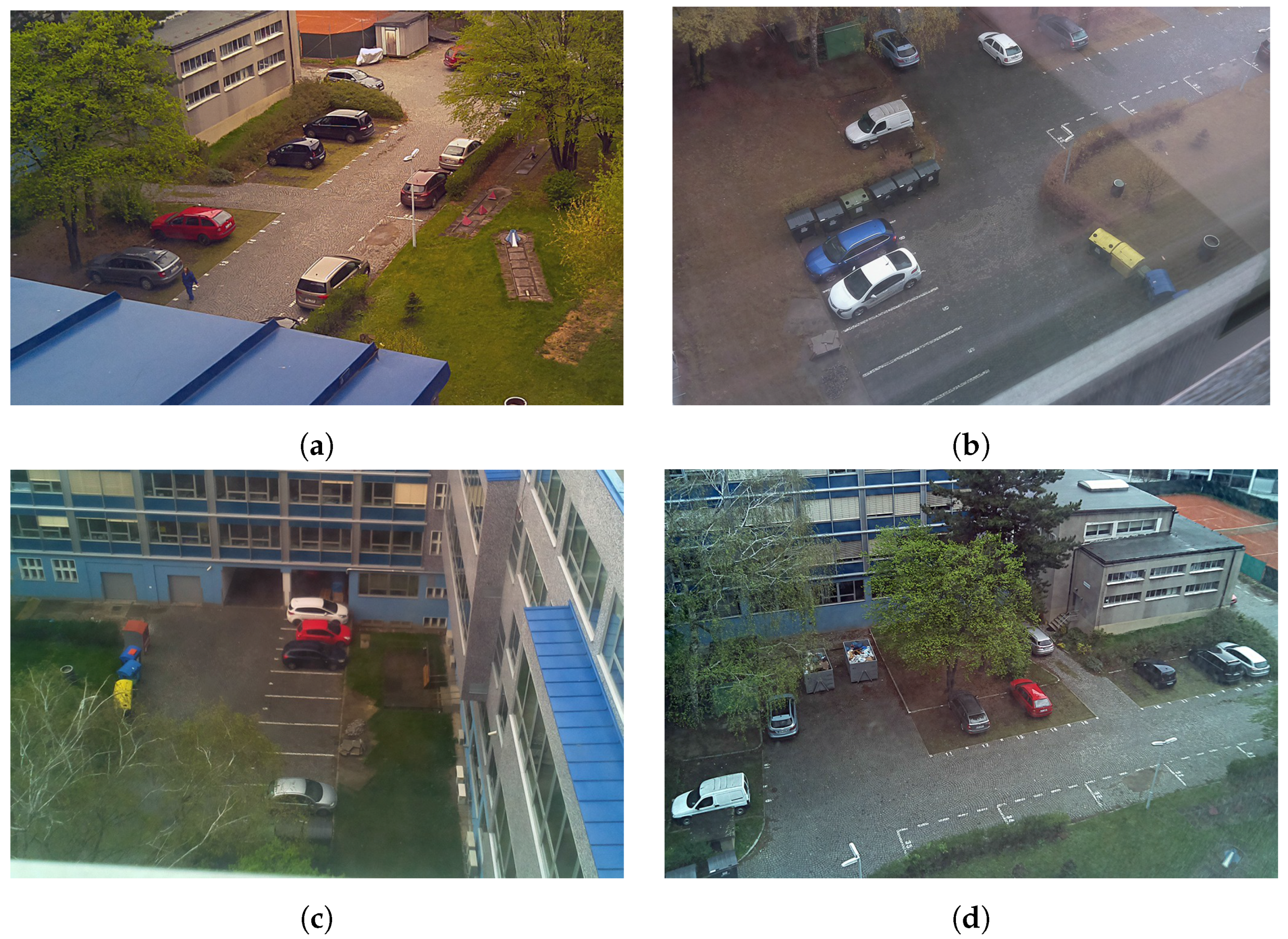
Performance of our algorithm was determined on the publicly available dataset for parking occupancy detection PKLot. We also collected two new datasets based on the different approach (more views and weather conditions) and then evaluated them. Average time to classify one parking space is about 100 ms on Raspberry Pi Zero. For the real-world applications, we prepared two different scenarios that are able to manage off-street as well as on-street parking, with a self learning procedure. Clearly, there is room for further improvement, for example, the design of predicting algorithms. Tests in the real environment showed that the system works well for a wide range of light conditions. We would also like to solve possible security issues—our plan is to implement our system with the use of IBM Bluemix, which is employing secured MTTQ (Message Queue Telemetry Transport) protocol.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}