Machine Learning and Infrared Thermography for Fiber Orientation Assessment on Randomly-Oriented Strands Parts

 ,
,  , , , , ,
, , , , ,  , and
, and
Abstract
:1. Introduction
2. Methodology
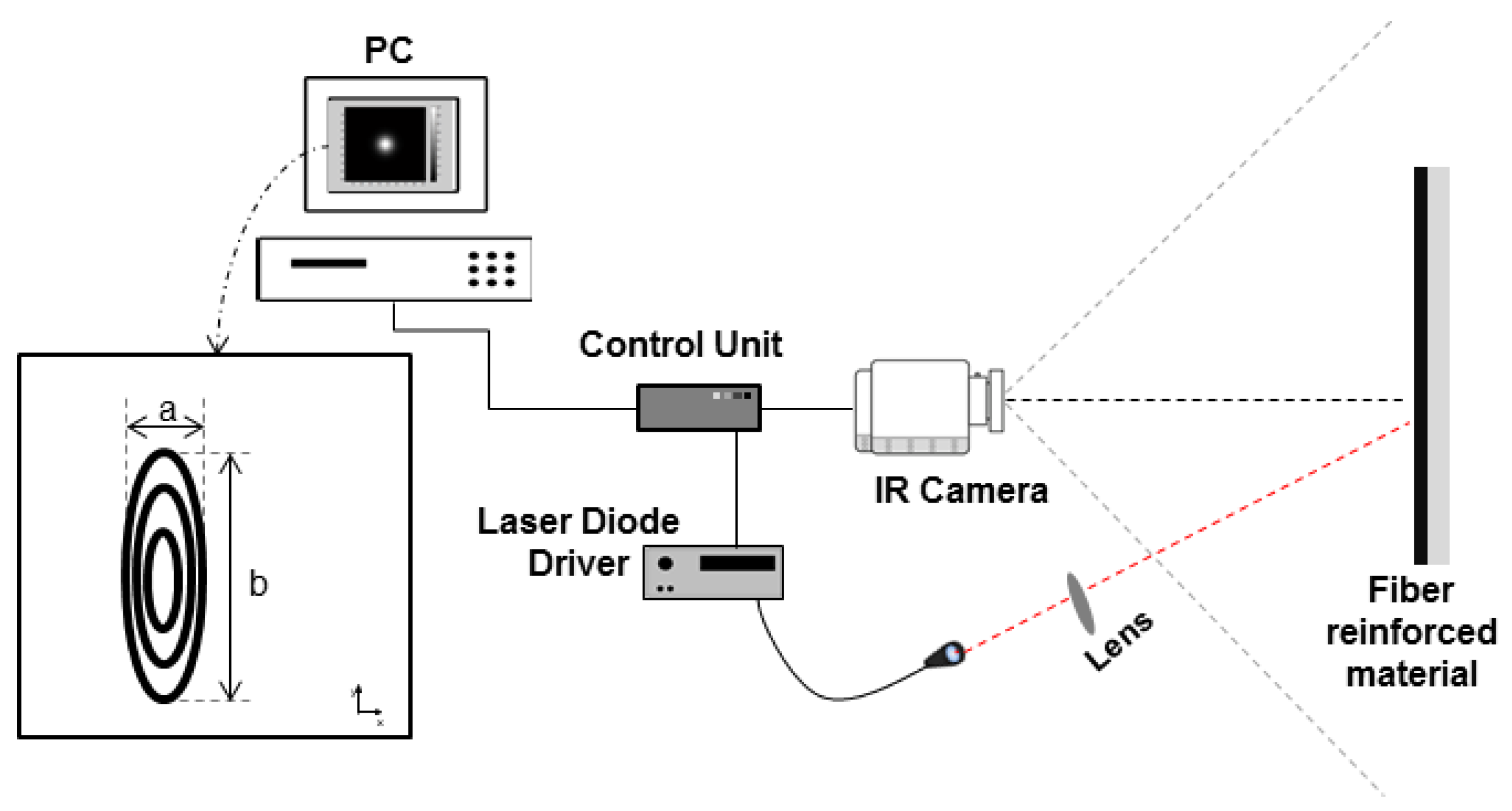
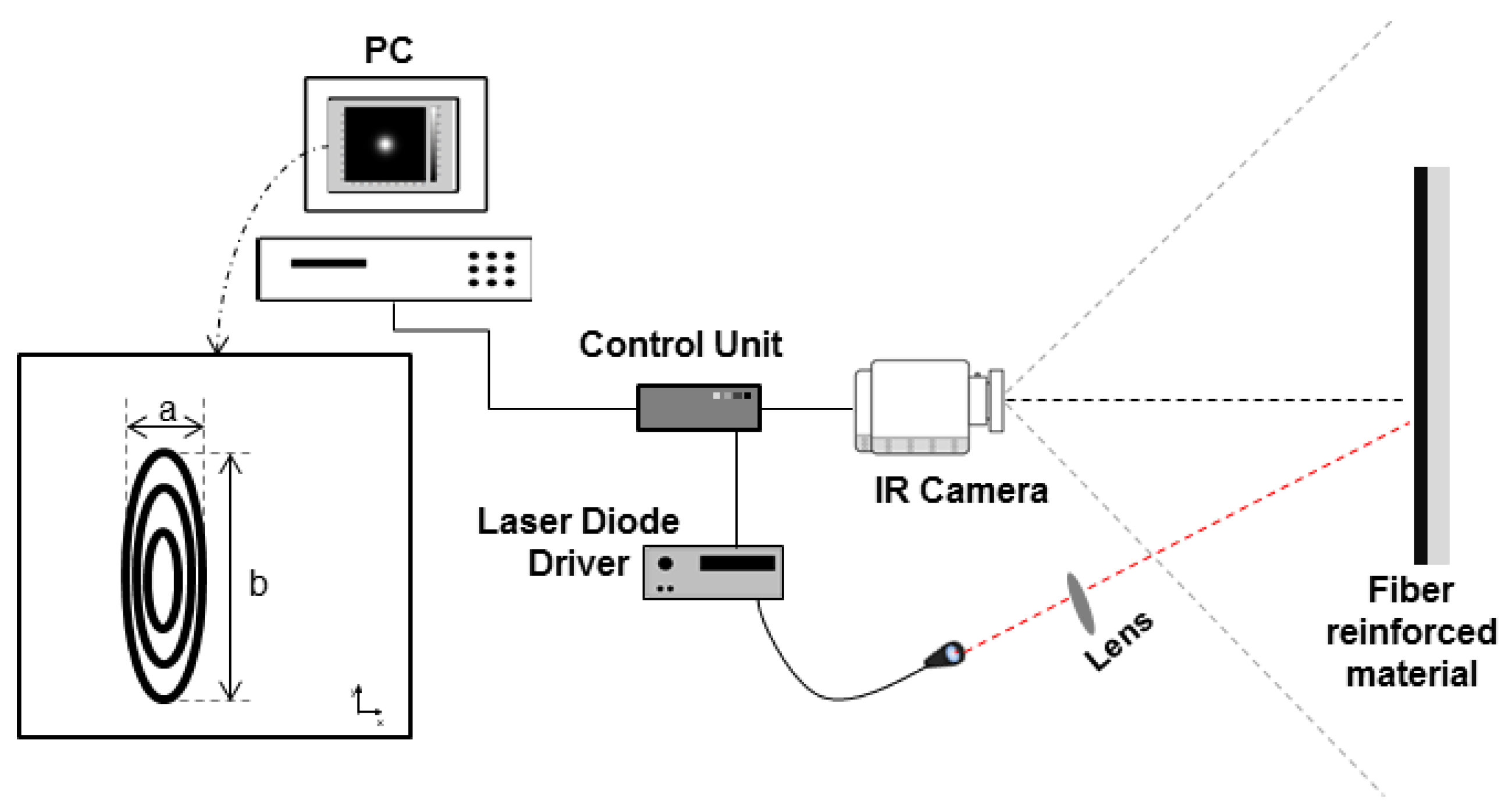
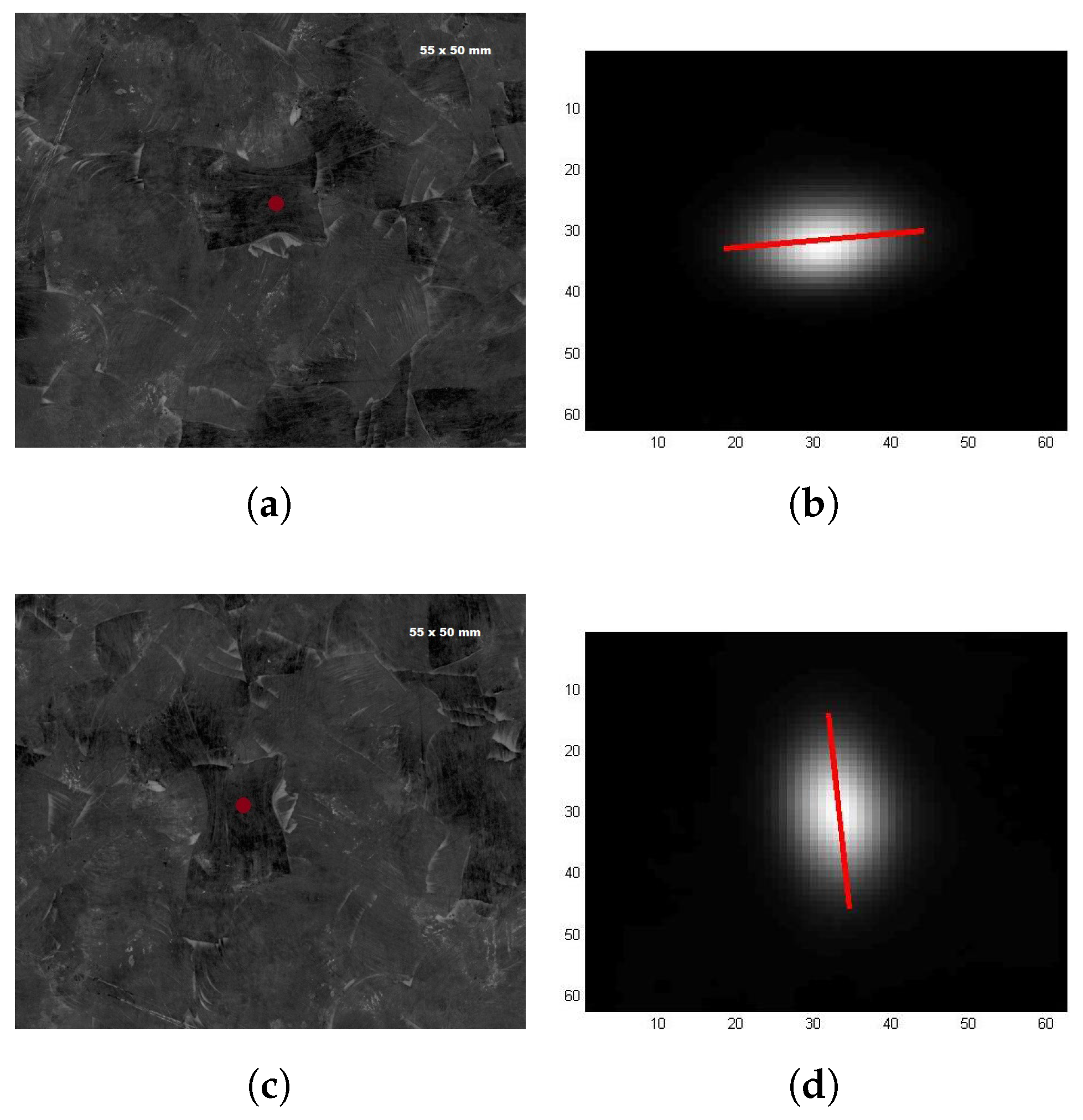
2.1. Pulsed Thermal Ellipsometry
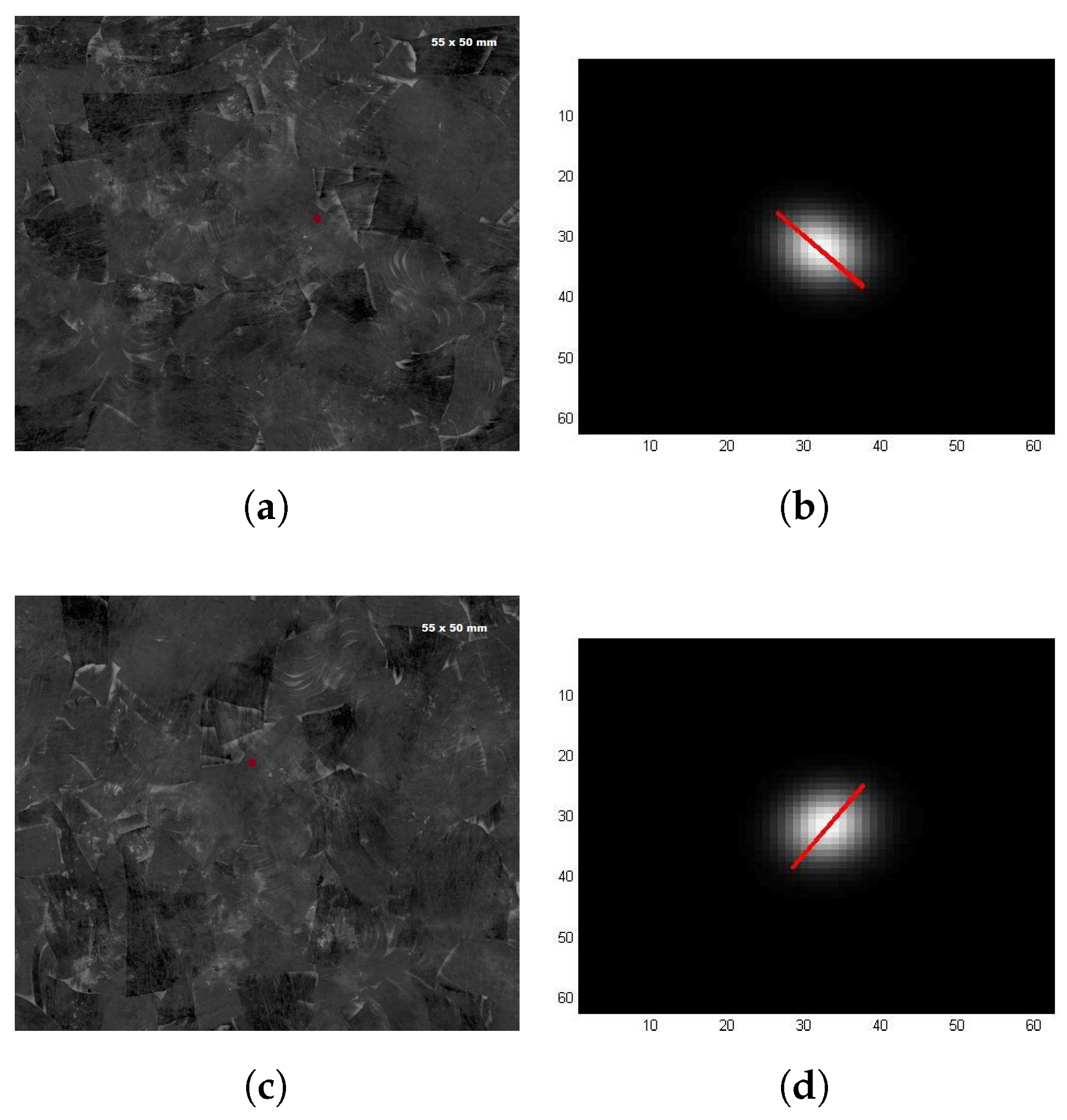
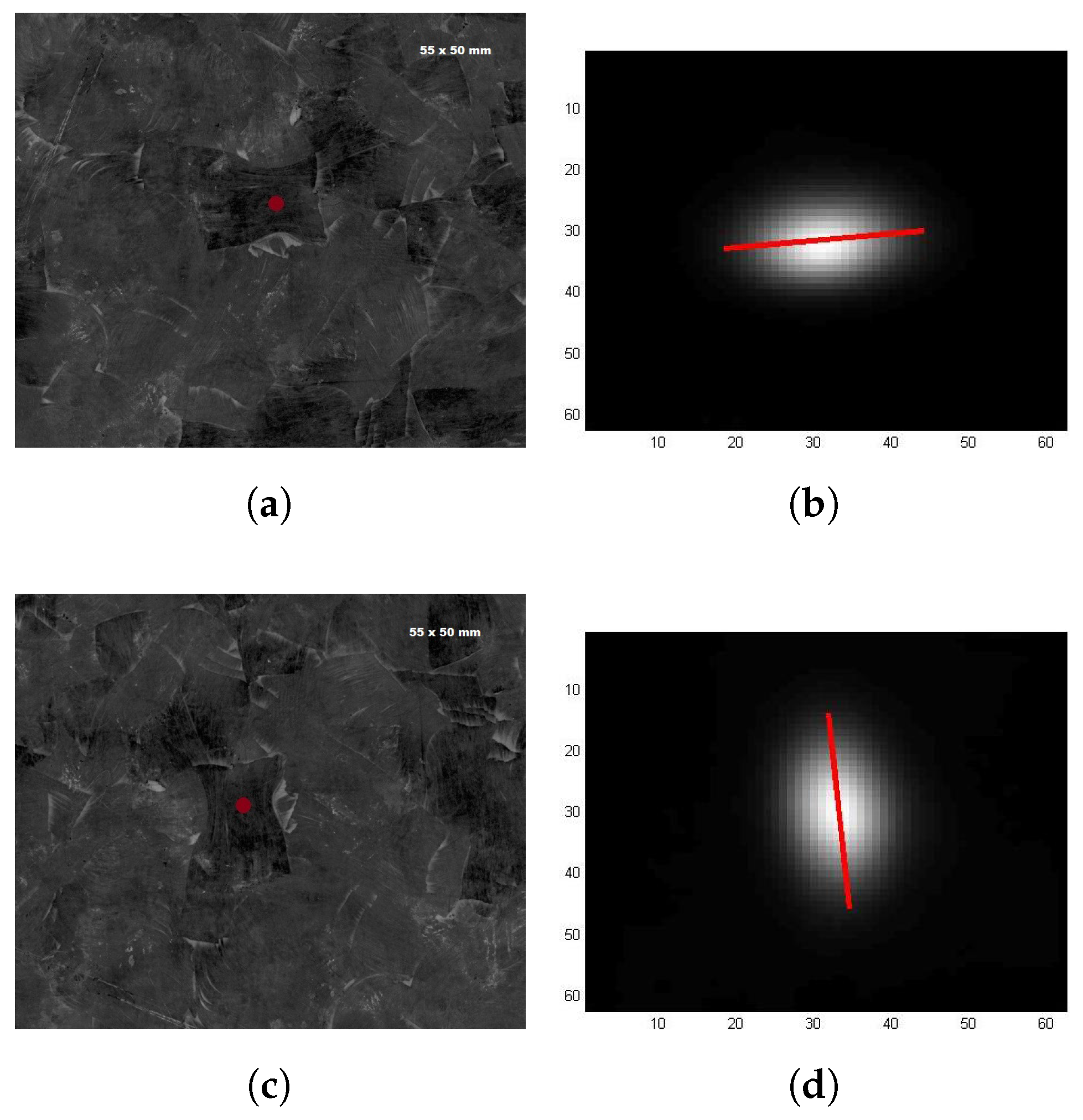
2.1.1. Point Heating Source Approach
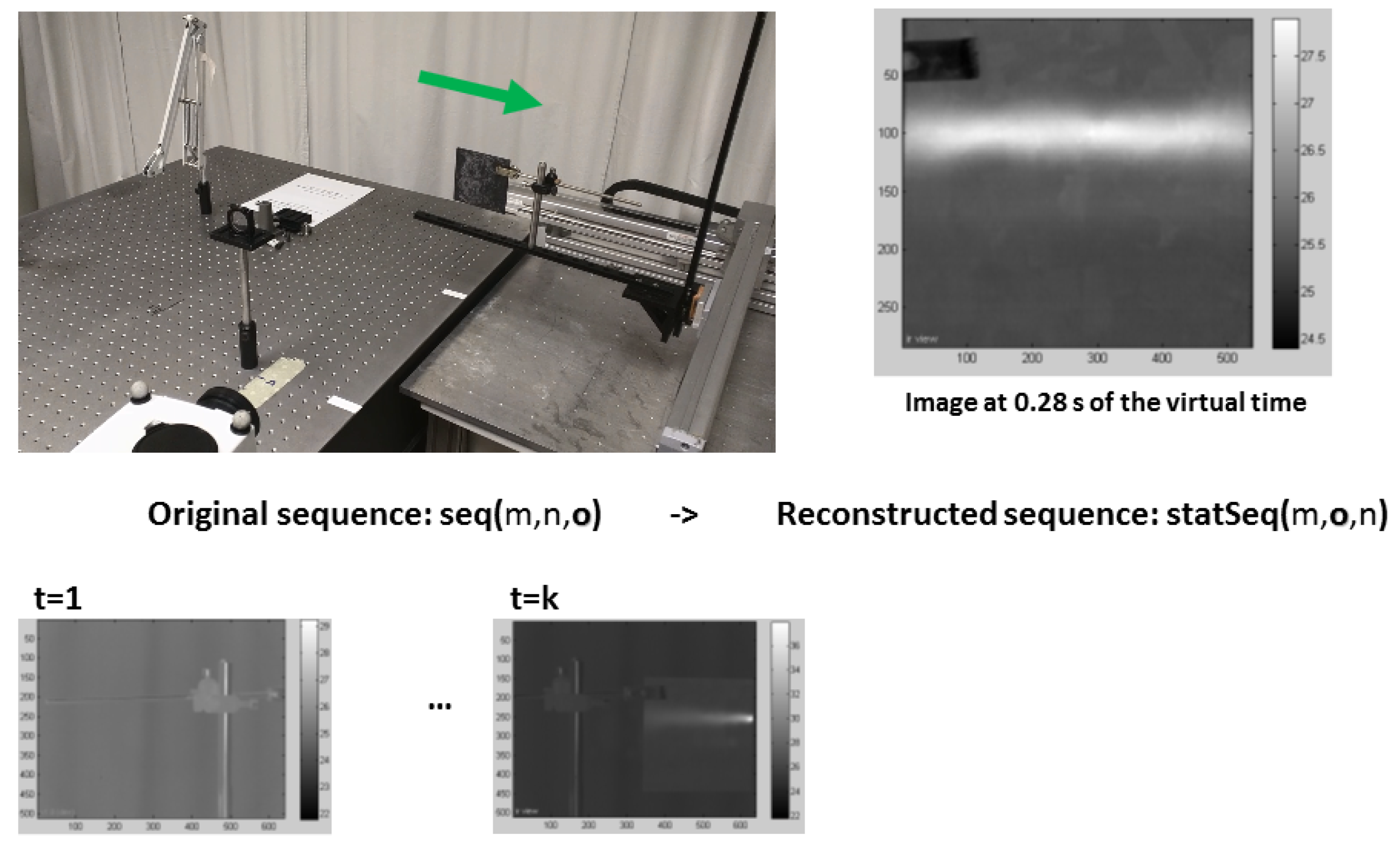
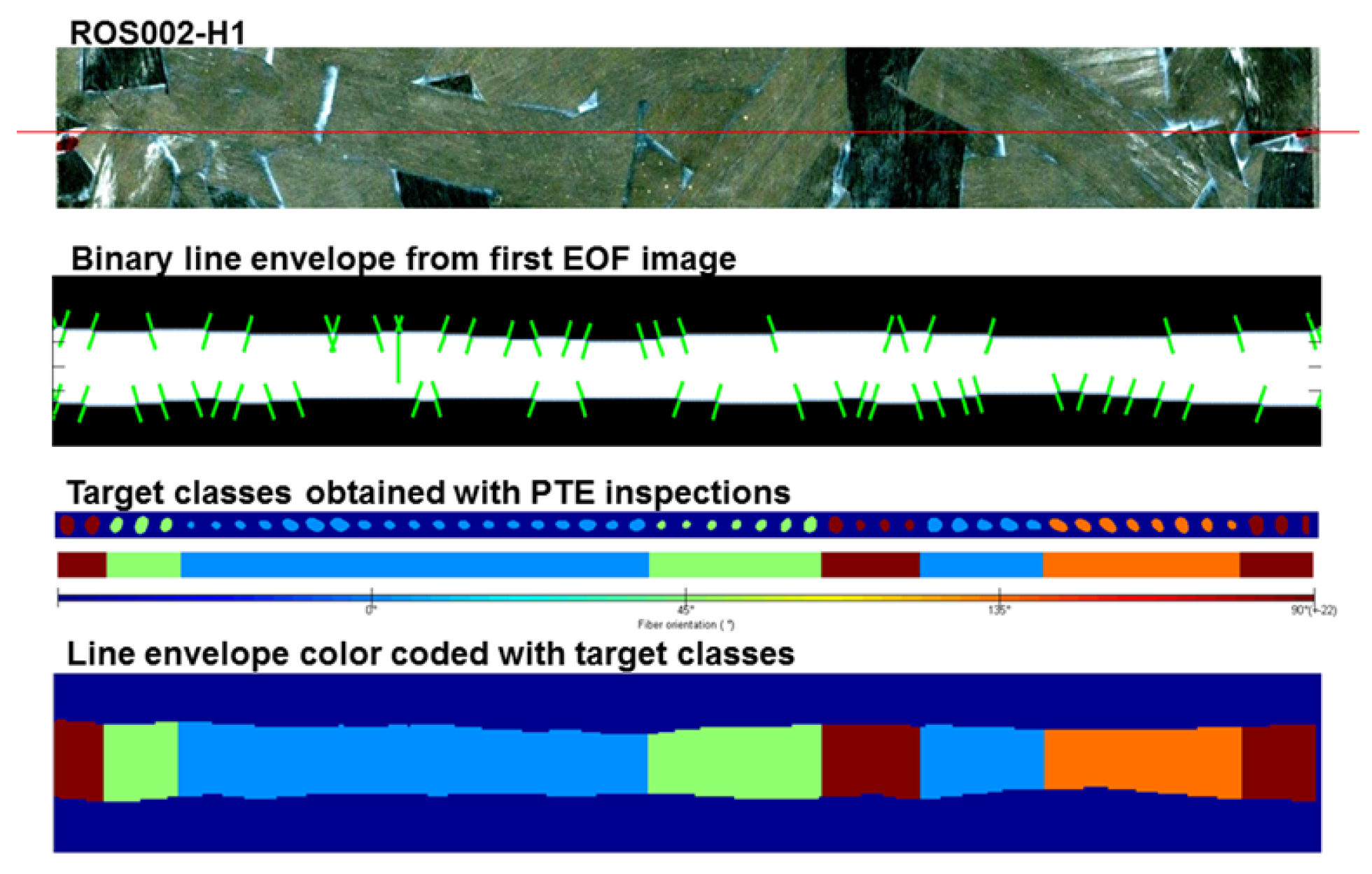
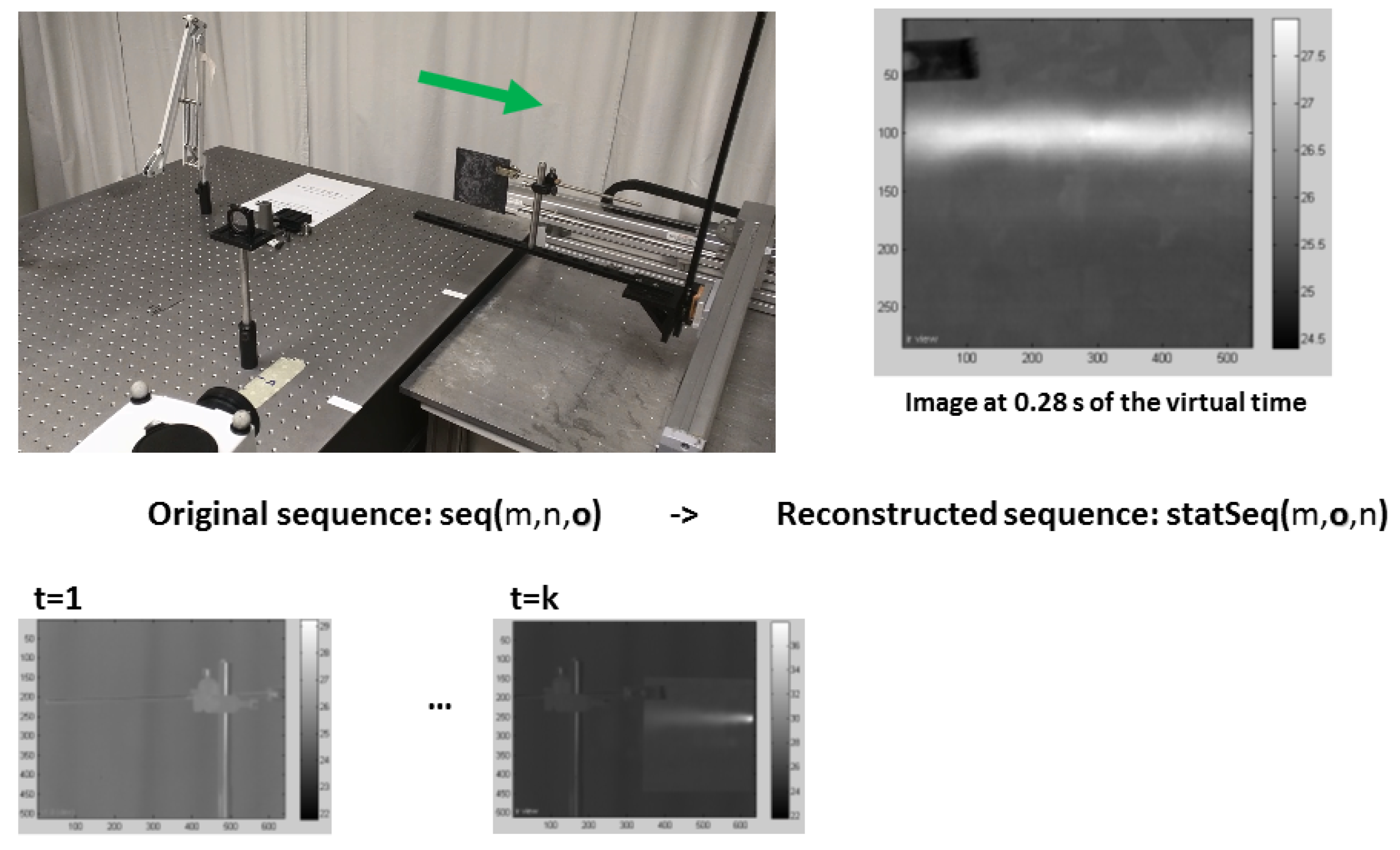
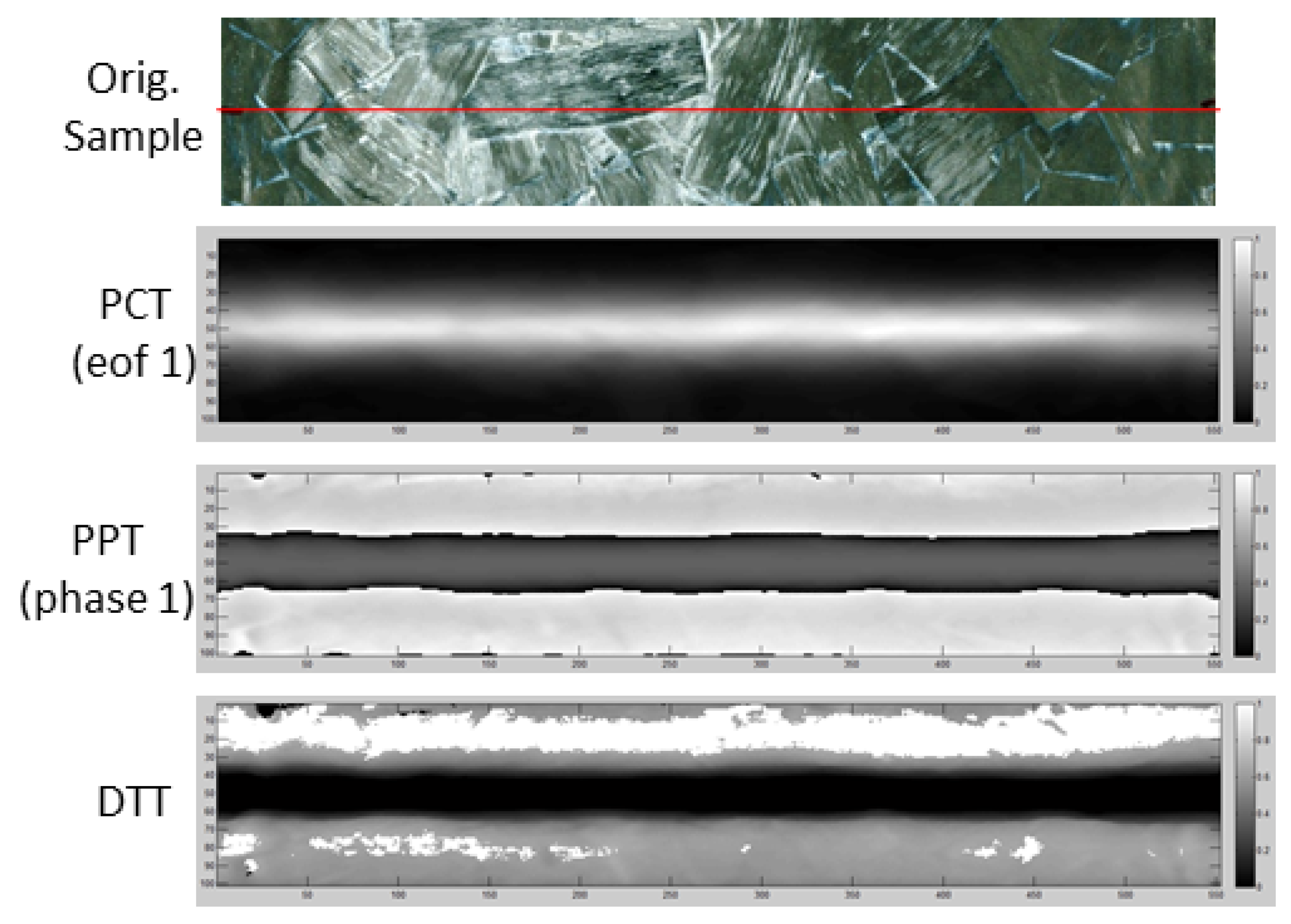
2.1.2. Line Approach
2.2. Image Processing Techniques
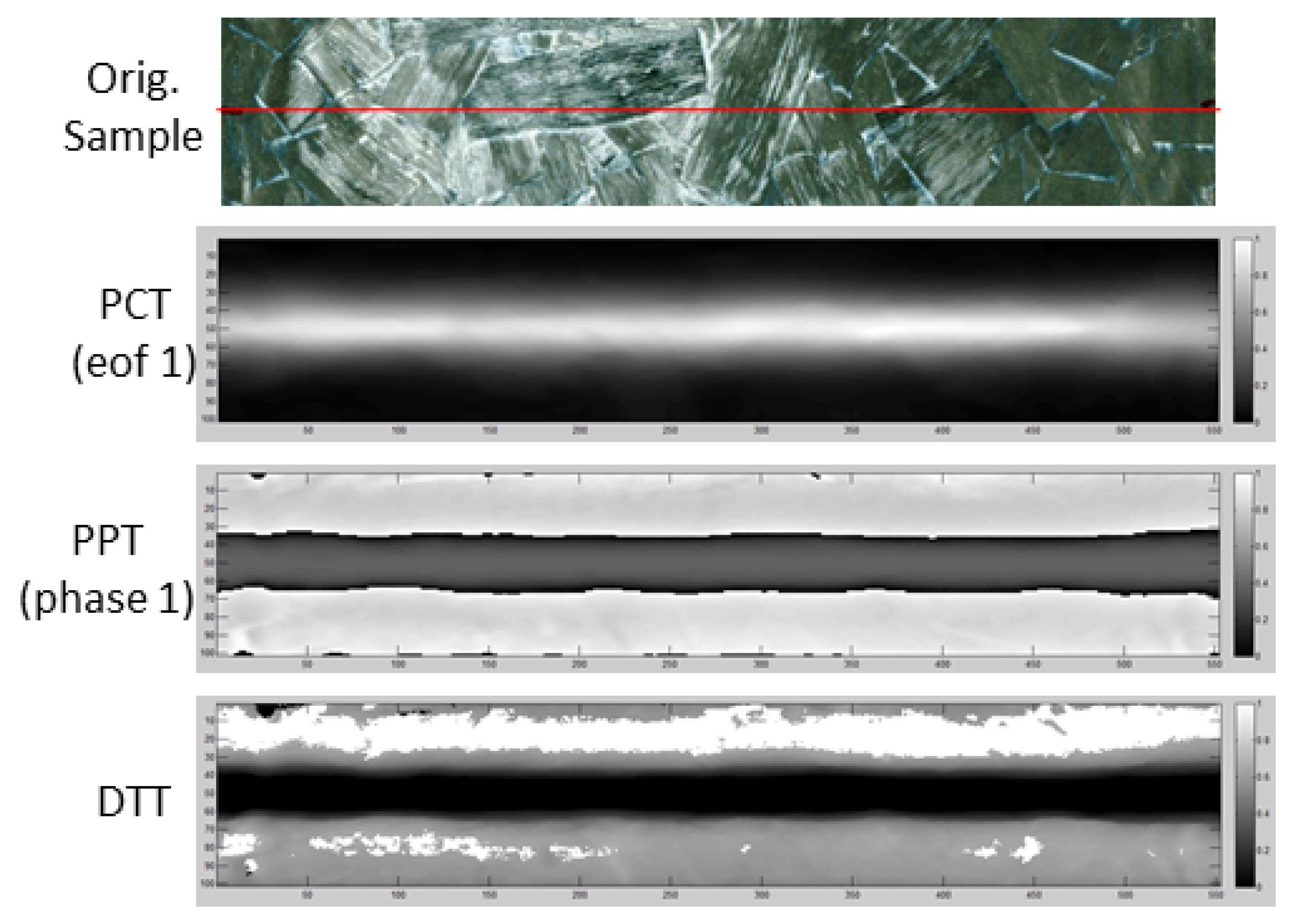
2.2.1. Dynamic Thermal Tomography (DTT)
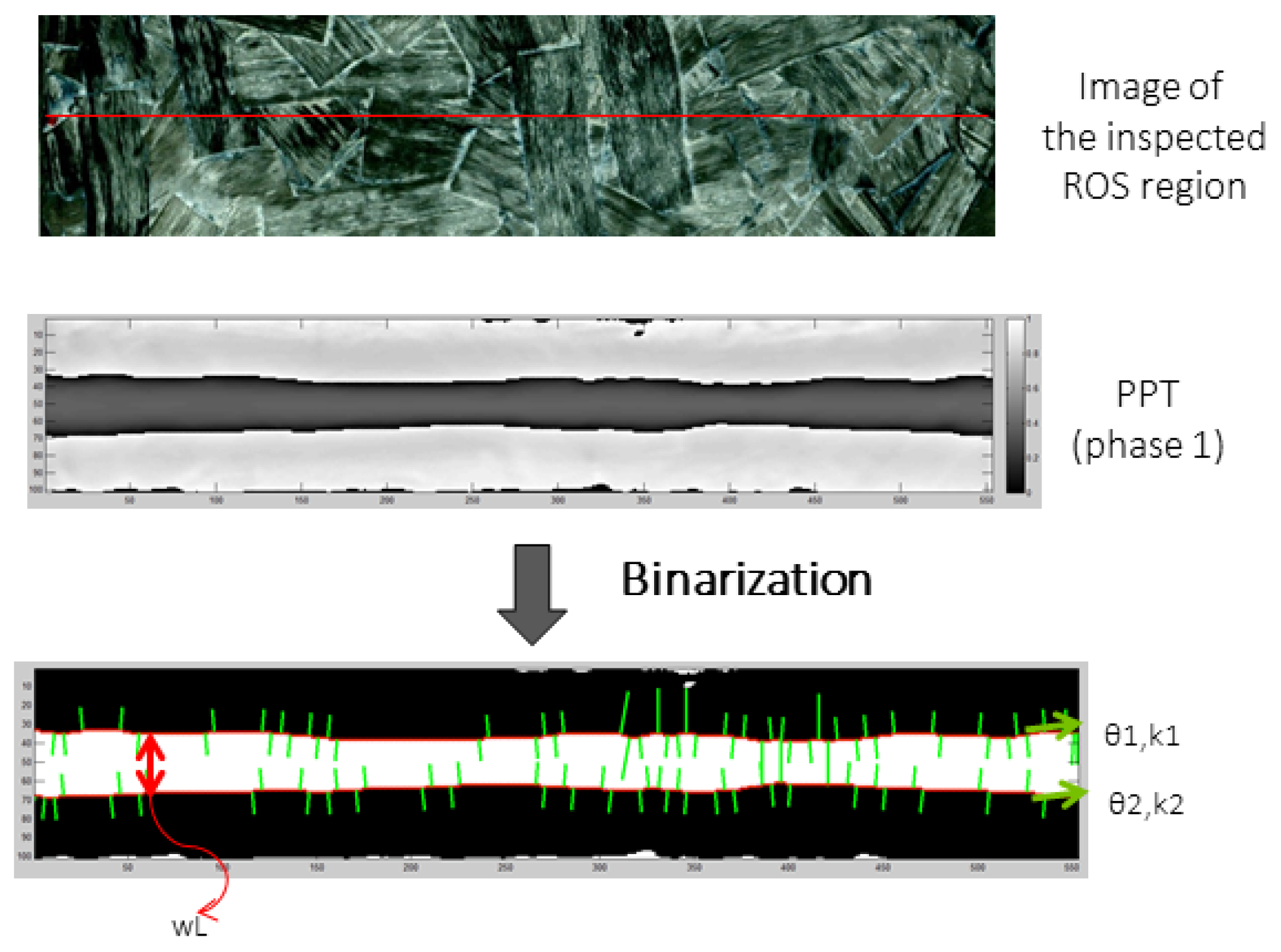
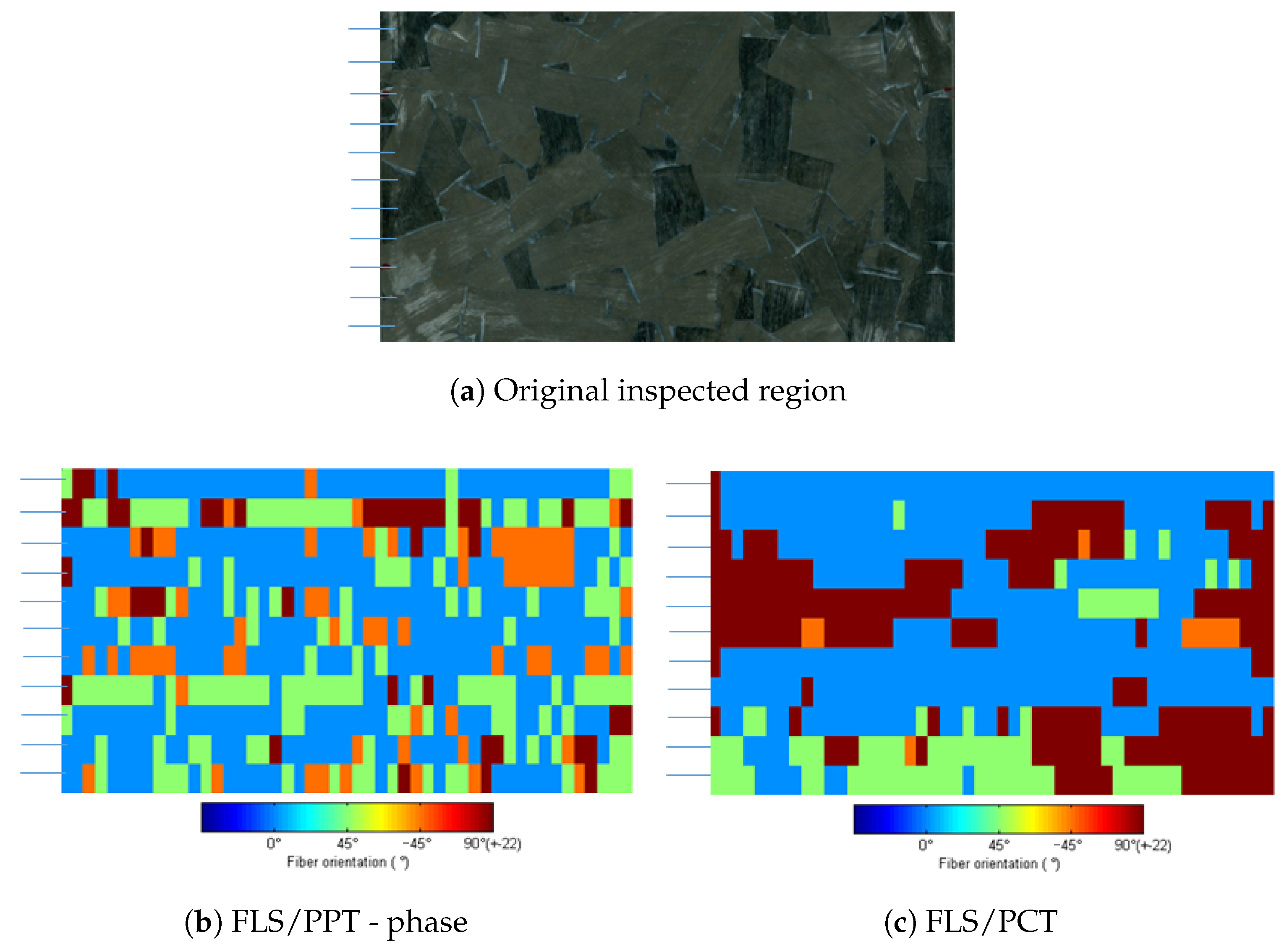
2.2.2. Pulsed Phase Thermography (PPT)
2.2.3. Principal Component Thermography (PCT)
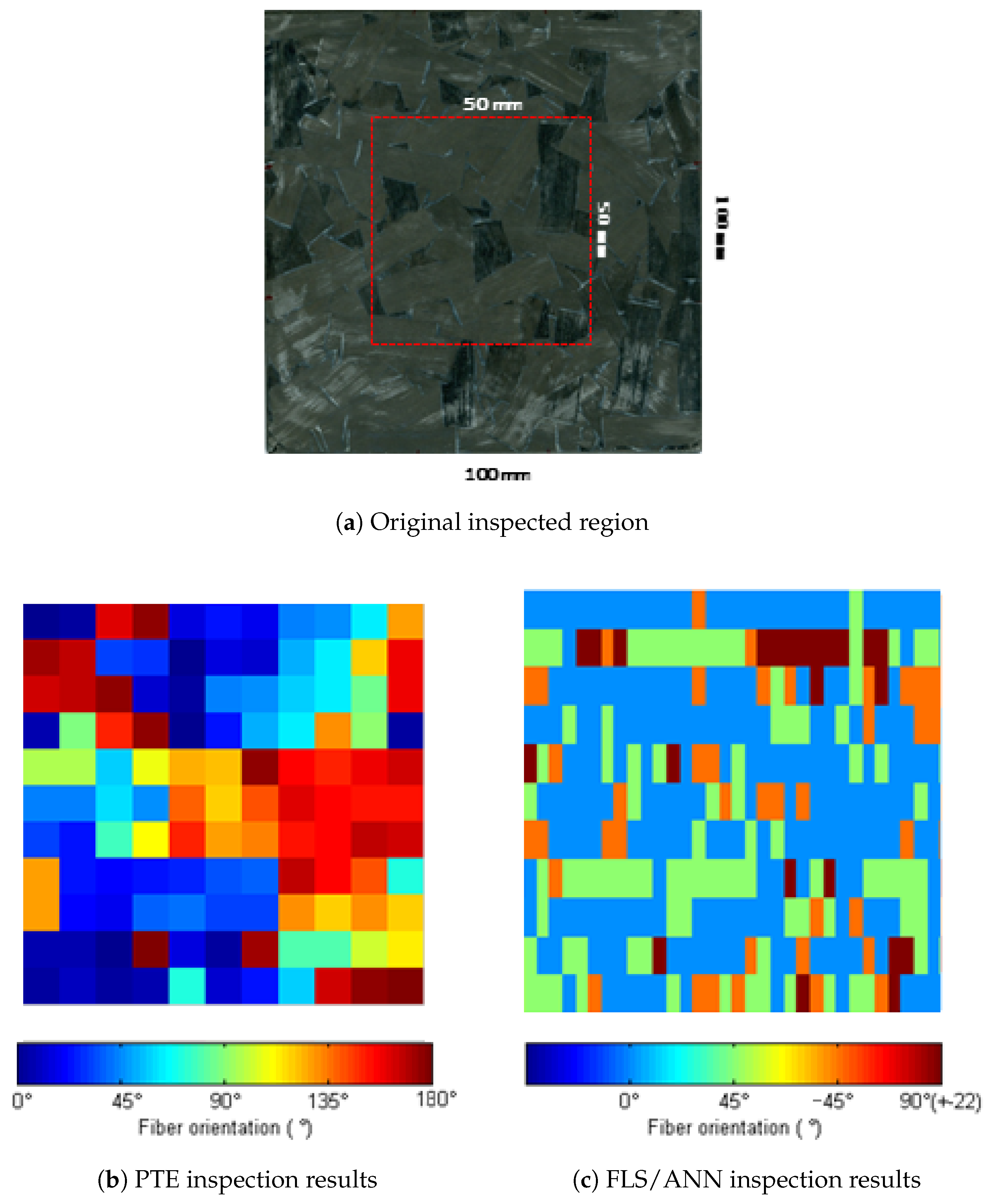
2.3. Artificial Neural Network (ANN)
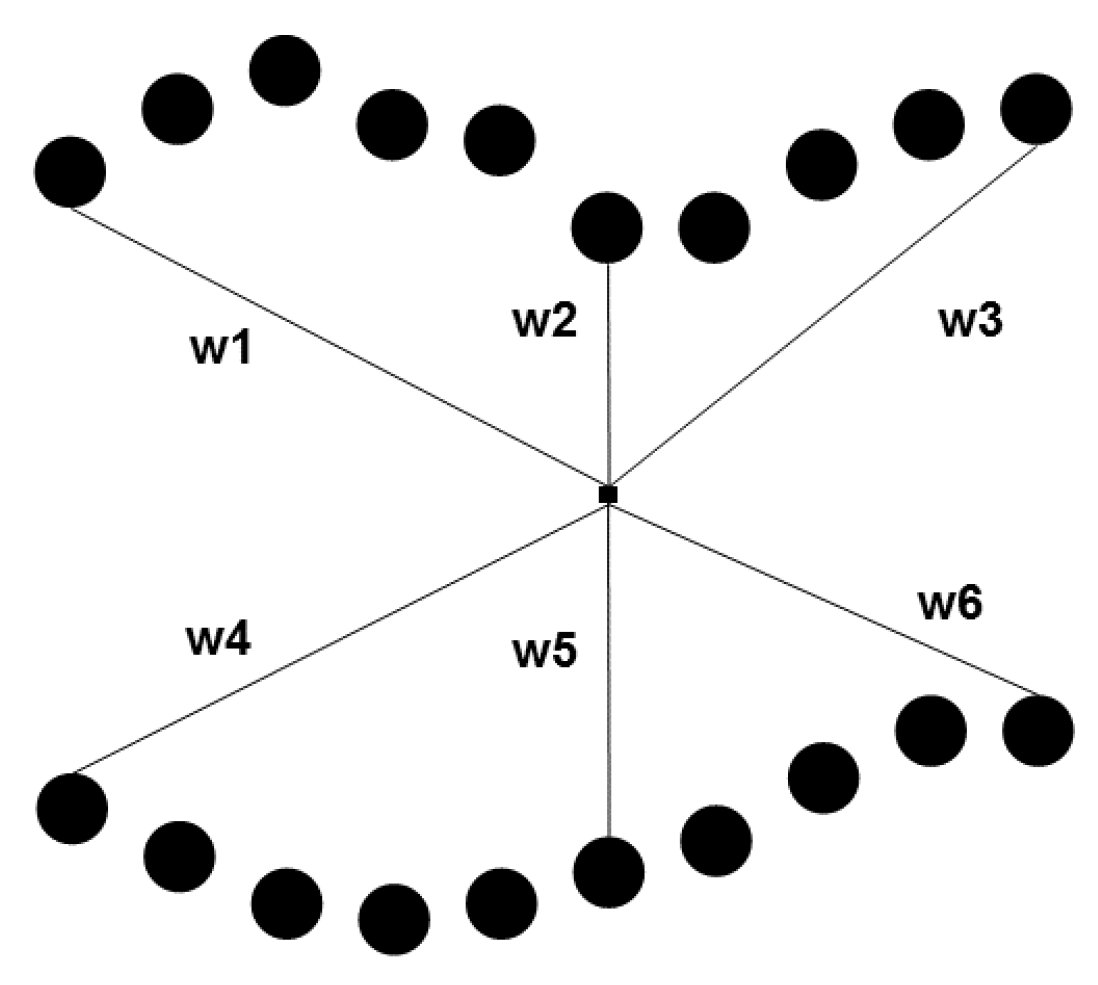
2.3.1. ANN Input
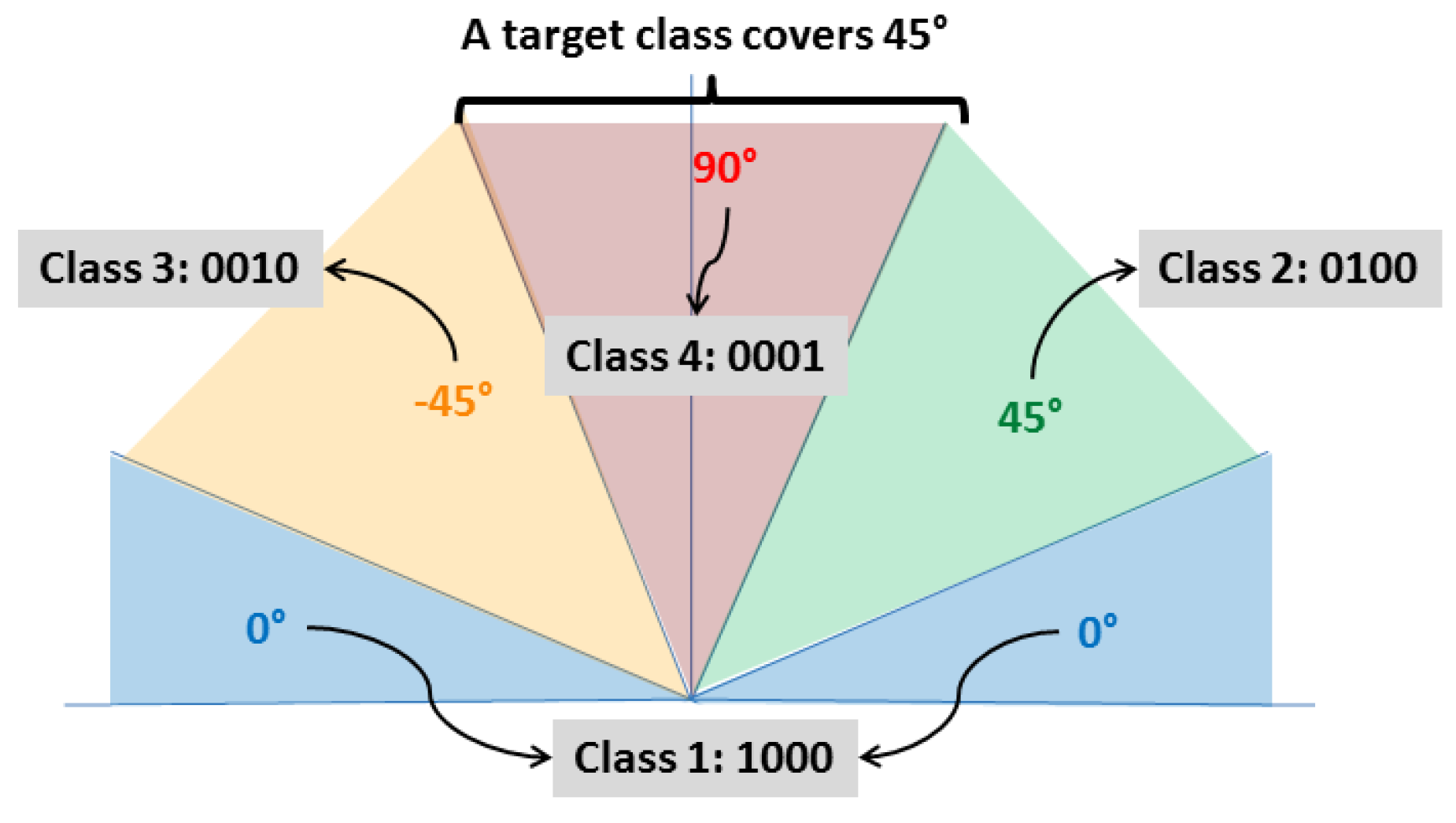
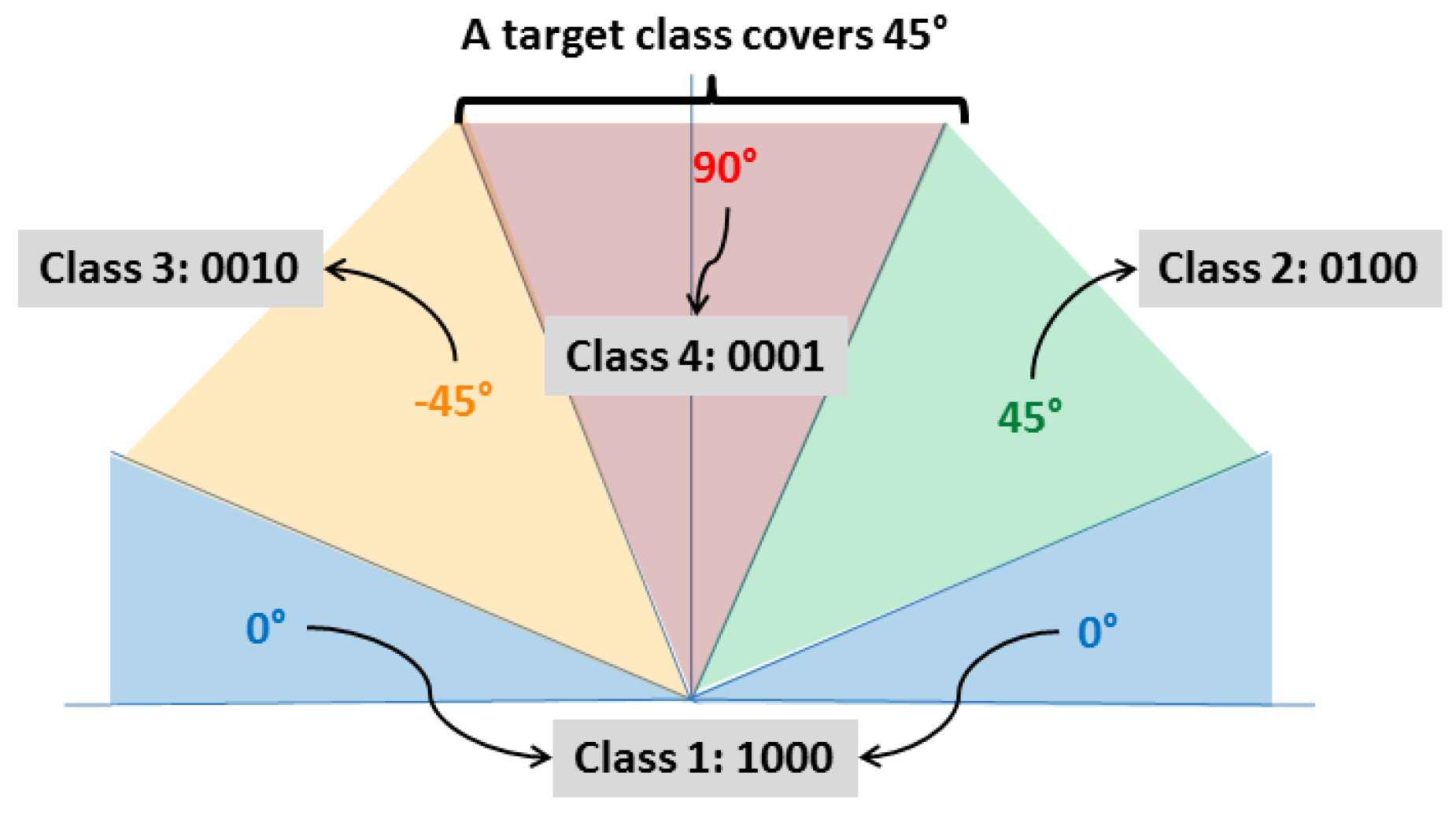
2.3.2. ANN Output
2.3.3. ANN Training
3. Results and Discussion
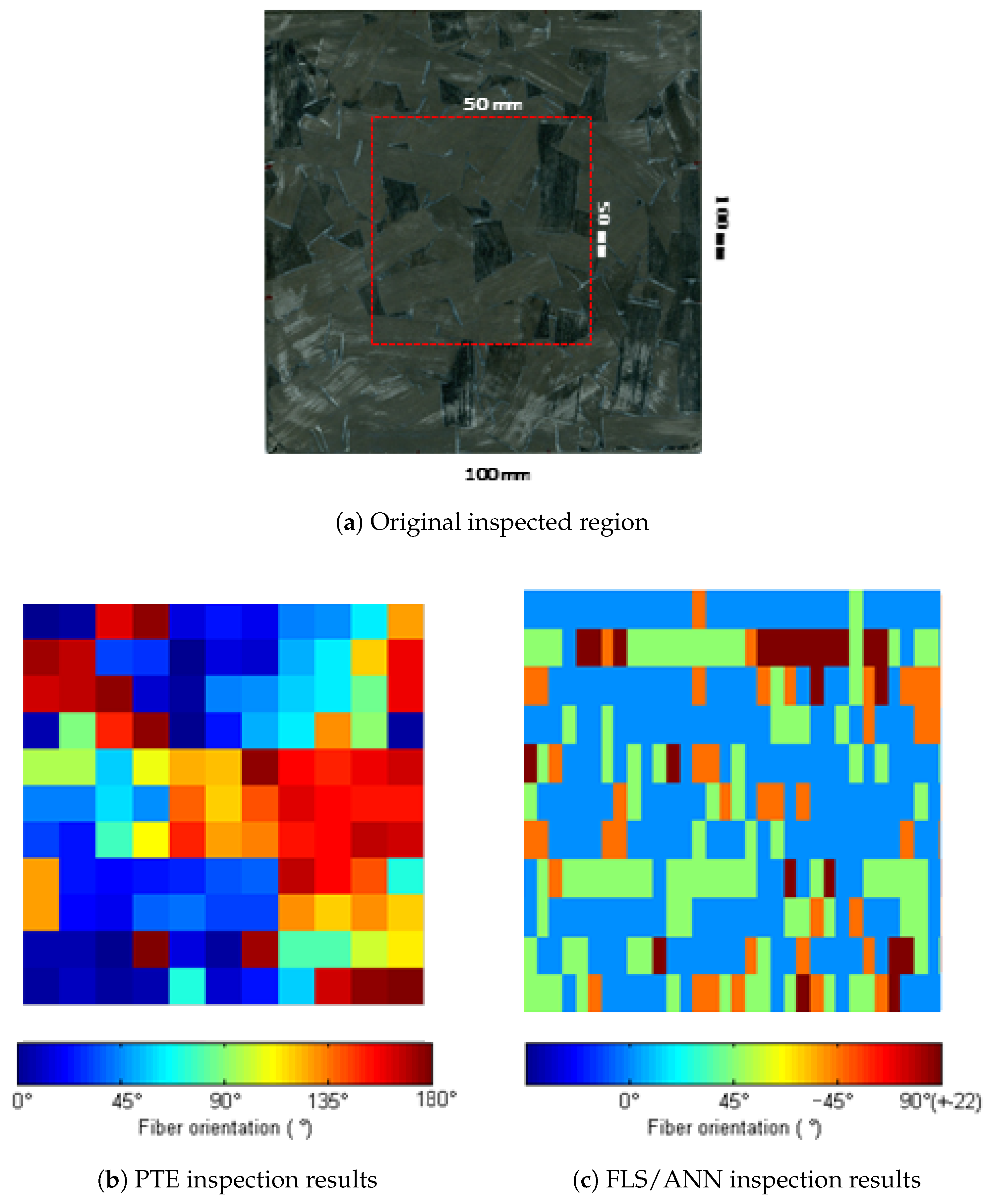
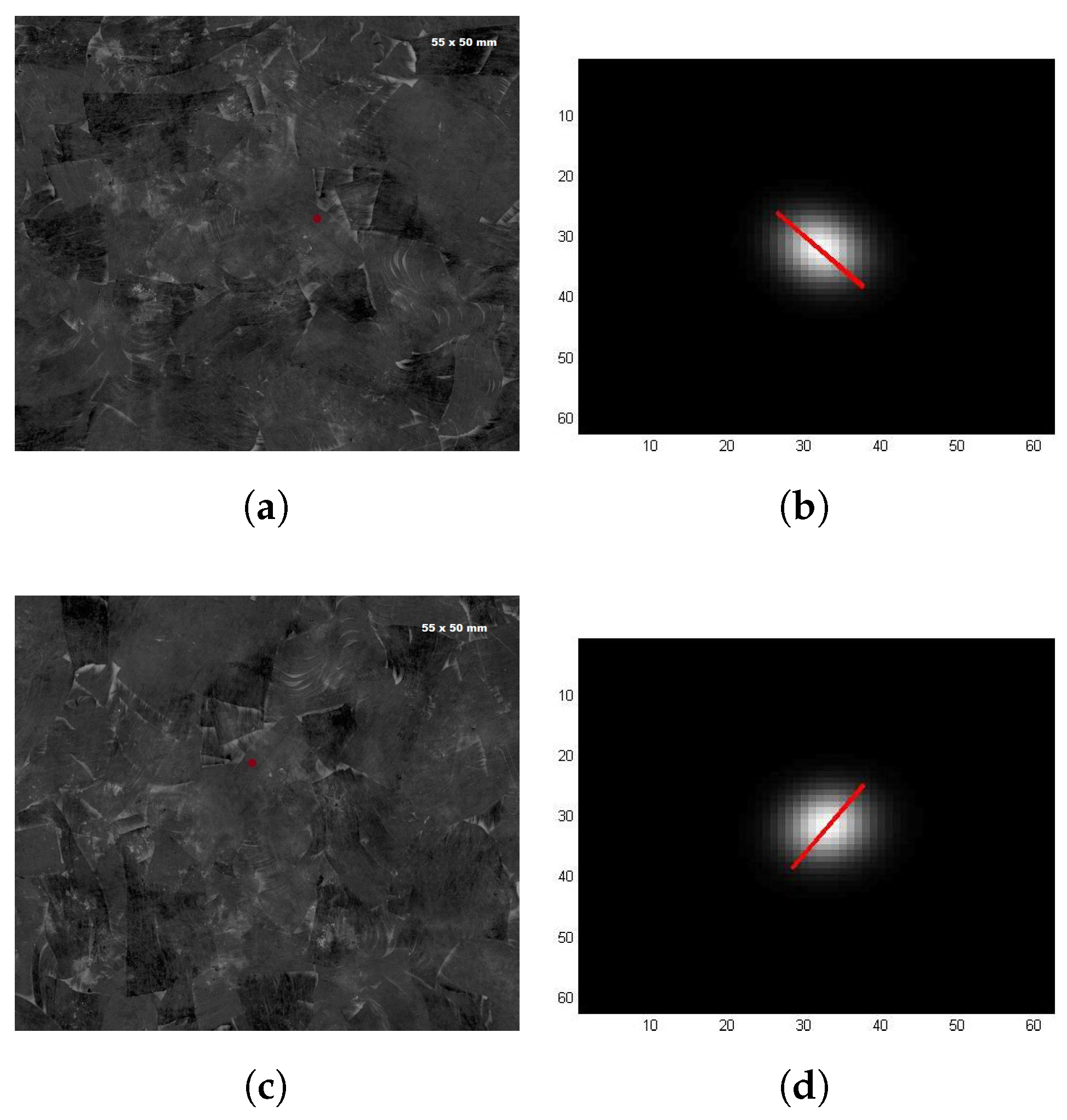
3.1. Pulsed Thermal Ellipsometry Results
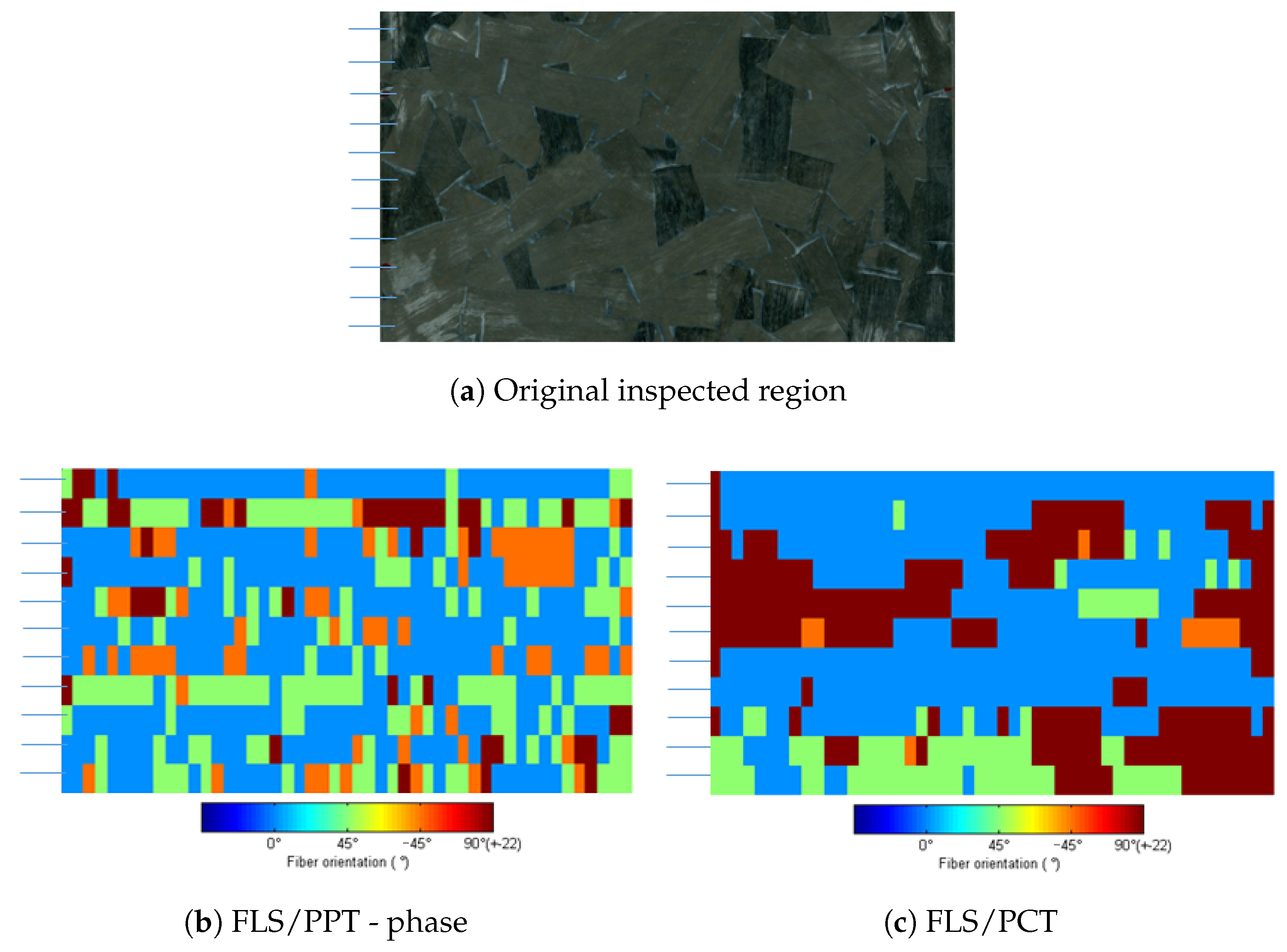
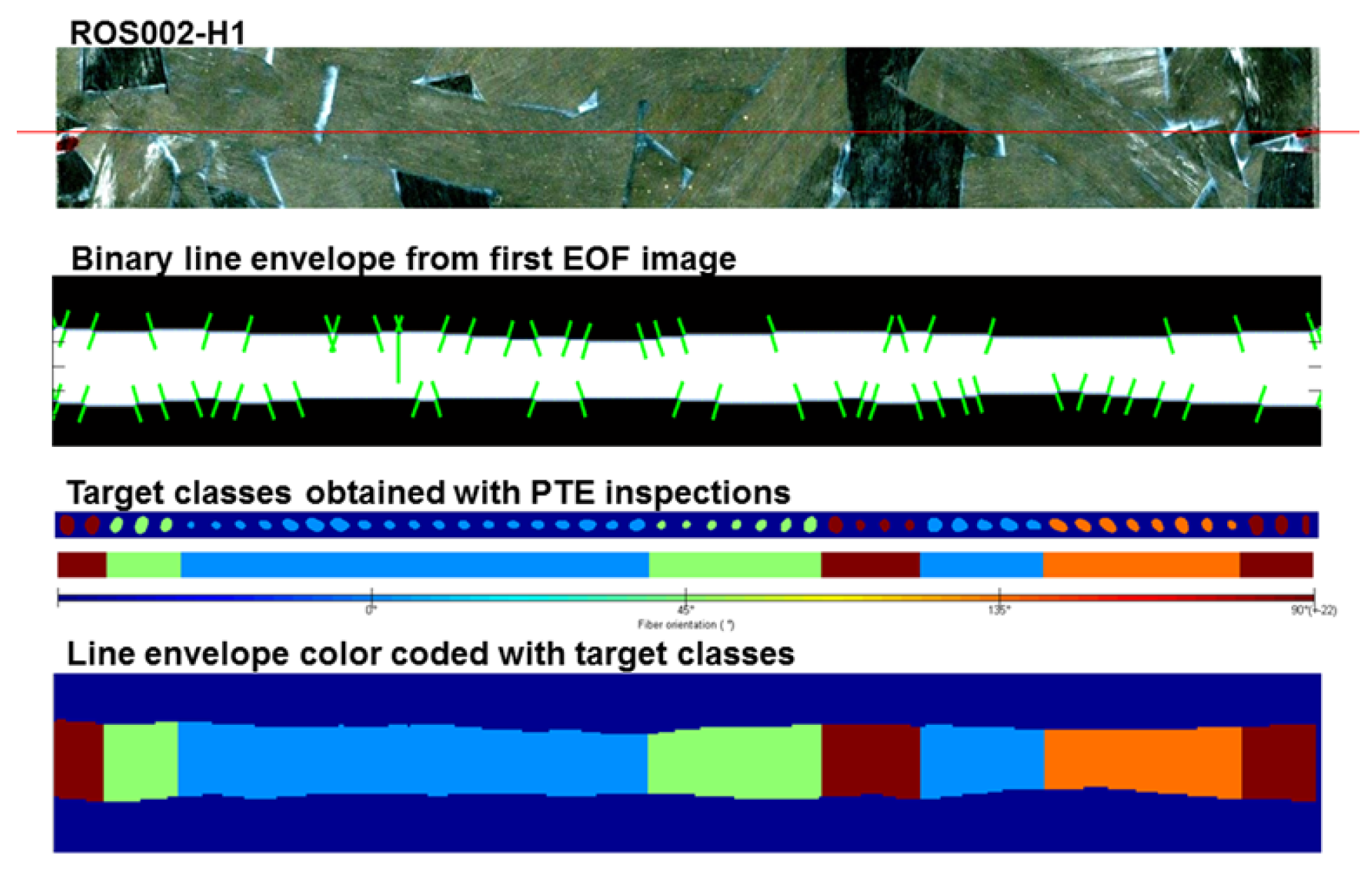
3.2. Line Approach Results
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Rezende, M.C.; Botelho, E.C. O uso de compósitos estruturais na indústria aeroespacial. Polímeros 2000, 10, e4–e10. [Google Scholar] [CrossRef]
- Zhang, H.; Sfarra, S.; Saluja, K.; Peeters, J.; Fleuret, J.; Duan, Y.; Fernandes, H.; Avdelidis, N.; Ibarra-Castanedo, C.; Maldague, X. Non-destructive Investigation of Paintings on Canvas by Continuous Wave Terahertz Imaging and Flash Thermography. J. Nondestruct. Evaluation 2017, 36, 34. [Google Scholar] [CrossRef]
- Zhang, H.; Yu, L.; Hassler, U.; Fernandes, H.; Genest, M.; Robitaille, F.; Joncas, S.; Holub, W.; Sheng, Y.; Maldague, X. An experimental and analytical study of micro-laser line thermography on micro-sized flaws in stitched carbon fiber reinforced polymer composites. Compos. Sci. Technol. 2016, 126, 17–26. [Google Scholar] [CrossRef]
- Fernandes, H.; Zhang, H.; Figueiredo, A.; Ibarra-Castanedo, C.; Guimarares, G.; Maldague, X. Carbon fiber composites inspection and defect characterization using active infrared thermography: numerical simulations and experimental results. Appl. Opt. 2016, 55, D46–D53. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Sfarra, S.; Sarasini, F.; Ibarra-Castanedo, C.; Perilli, S.; Fernandes, H.; Duan, Y.; Peeters, J.; Avelidis, N.P.; Maldague, X. Optical and Mechanical Excitation Thermography for Impact Response in Basalt-Carbon Hybrid Fiber-Reinforced Composite Laminates. IEEE Trans. Ind. Informat. 2017. [Google Scholar] [CrossRef]
- Maldague, X. Theory and Practice of Infrared Technology for Nondestructive Testing, 1st ed.; Wiley-Interscience: New York, NY, USA, 2001; p. 684. [Google Scholar]
- Senarmont, M.H.D. Mémoire sur la Conductivité des Substances Cristallisées Pour la Chaleur: Second Mémoire; Imprr. de Bachelier: Paris, France, 1848; Volume 3, pp. 179–211. [Google Scholar]
- Krapez, J.C. Thermal ellipsometry applied to the evaluation of fibre orientation in composite. Journee d’Etude sur la Thermographie 1994. [Google Scholar]
- Aindow, J.D.; Markham, M.E.; Puttick, K.E.; Rider, J.G.; Rudman, M.R. Fibre orientation detection in injection-moulded carbon fibre reinforced components by thermography and ultrasonics. NDT E Int. 1986, 19, 24–29. [Google Scholar] [CrossRef]
- Cielo, P.; Maldague, X.; Krapez, J.C.; Lewak, R. Optics-based techniques for the characterization of composites and ceramics. In Optics-Based Techniques for the Characterization of Composites and Ceramics; Bussiere, J.F., Monchalin, J.P., Ruud, C.O., GReen, R.E., Eds.; Springer: Boston, MA, USA, 1987; pp. 733–744. [Google Scholar]
- Krapez, J.C. Thermal Ellipsometry: A Tool Applied for in-Depth Resolved Characterization of Fibre Orientation in Composites. In Review of Progress in Quantitative Nondestructive Evaluation; Thompson, D.O., Chimenti, D.E., Eds.; Springer: Boston, MA, USA, 1996; pp. 533–540. [Google Scholar]
- Krapez, J.C.; Gardette, G.; Balageas, D. Thermal ellipsometry in steady-state and by lock-in thermography. Application to anisotropic materials characterization. In Proceedings of the QIRT 96, Stuttgart, Germany, January 1996; pp. 257–262. [Google Scholar] [CrossRef]
- Krapez, J.C.; Gardette, G. Characterisation of anisotropic materials by steady-state and modulated thermal ellipsometry. High Temp. High Press. 1998, 30, 567–574. [Google Scholar] [CrossRef]
- Karpen, W.; Wu, D.; Busse, G. A Theoretical Model for the Measurement of Fiber Orientation with Thermal Waves. Res. Nondestruct. Evaluation 1999, 11, 179–197. [Google Scholar] [CrossRef]
- Kalogiannakis, G.; Hemelrijck, D.V.; Longuemart, S.; Ravi, J.; Okasha, A.; Glorieux, C. Thermal characterization of anisotropic media in photothermal point, line, and grating configuration. J. Appl. Phys. 2006, 100, 063521. [Google Scholar] [CrossRef]
- Fernandes, H.; Zhang, H.; Maldague, X. An active infrared thermography method for fiber orientation assessment of fiber-reinforced composite materials. Infrared Phys. Technol. 2015, 72, 286–292. [Google Scholar] [CrossRef]
- Fernandes, H.; Zhang, H.; Ibarra-Castanedo, C.; Maldague, X. Fiber orientation assessment on randomly-oriented strand composites by means of infrared thermography. Compos. Sci. Technol. 2015, 121, 25–33. [Google Scholar] [CrossRef]
- Gruss, C.; Balageas, D. Theoretical and experimental applications of the flying spot camera. In Proceedings of the QIRT 92, Paris, France, 7–9 July 1992; pp. 19–24. [Google Scholar]
- Ibarra-Castanedo, C.; Servais, P.; Ziadi, A.; Klein, M.; Maldague, X. RITA—Robotized Inspection by Thermography and Advanced processing for the inspection of aeronautical components. In Proceedings of the 12th International Conference on Quantitative InfraRed Thermography, Bordeaux, France, 7–11 July 2014. [Google Scholar]
- Vavilov, V.P.; Maldague, X.P. Dynamic thermal tomography: New promise in the IR thermography of solids. In Proceedings of the SPIE—The International Society for Optical Engineering, Orlando, FL, USA, 22–24 April 1992; pp. 194–206. [Google Scholar]
- Maldague, X.; Marinetti, S. Pulse phase thermography. J. Appl. Phys. 1996, 79, 2694–2698. [Google Scholar] [CrossRef]
- Rajic, N. Principal component thermography for flaw contrast enhancement and flaw depth characterisation in composite structures. Compos. Struct. 2002, 58, 521–528. [Google Scholar] [CrossRef]
- Ibarra-Castanedo, C.; Maldague, X. Review of pulse phase thermography. In Proceedings of the SPIE—Thermosense: Thermal Infrared Applications XXXVII, Baltimore, MD, USA, 12 May 2015. [Google Scholar]
- Ibarra-Castanedo, C.; Maldague, X. Pulsed phase thermography reviewed. Quant. InfraRed Thermogr. J. 2004, 1, 47–70. [Google Scholar] [CrossRef]
- Shepard, S.M. Advances in pulsed thermography. In Proceedings of the SPIE, Thermosense: Thermal Infrared Applications XXVIII; SPIE: Bellingham, WA, USA, 2001; Volume 4360, pp. 511–515. [Google Scholar]
- Ibarra-Castanedo, C. Quantitative Subsurface Defect Evaluation by Pulsed Phase Thermography Depth Retrieval with the Phase. Ph.D. Thesis, Faculté des études supérieurs de Université Laval, Quebec City, QC, Canada, 2005. [Google Scholar]
- Bai, W.; Wong, B.S. Evaluation of defects in composite plates under convective environments using lock-in thermography. Meas. Sci. Technol. 2001, 12, 142–150. [Google Scholar] [CrossRef]
- Busse, G.; Rosencwaig, A. Subsurface imaging with photoacoustics. Appl. Phys. Lett. 1980, 36, 215–812. [Google Scholar] [CrossRef]
- Meola, C.; Carlomagno, G.M. Recent advances in the use of infrared thermography. Meas. Sci. Technol. 2004, 15, 27–58. [Google Scholar] [CrossRef]
- Meola, C.; Carlomagno, G.M.; Giorleo, L. The use of infrared thermography for materials characterization. J. Mater. Process. Technol. 2004, 155, 1132–1137. [Google Scholar] [CrossRef]
- Egmont-Petersen, M.; de Ridder, D.; Handels, H. Image processing with neural networks—A review. Pattern Recognit. 2002, 35, 2279–2301. [Google Scholar] [CrossRef]
- Darabi, A.; Maldague, X. Neural network based defect detection and depth estimation in TNDE. NDT E Int. 2002, 35, 165–175. [Google Scholar] [CrossRef]
- Benítez, H.D.; Loaiza, H.; Caicedo, E.; Ibarra-Castanedo, C.; Bendada, A.; Maldague, X. Defect characterization in infrared non-destructive testing with learning machines. NDT E Int. 2009, 42, 630–643. [Google Scholar] [CrossRef]
- Wang, H.; Hsieh, S.J.; Peng, B.; Zhou, X. Non-metallic coating thickness prediction using artificial neural network and support vector machine with time resolved thermography. Infrared Phys. Technol. 2016, 77, 316–324. [Google Scholar] [CrossRef]
- Fernandes, H.C.; Maldague, X.P.V. Fiber orientation assessment on surface and beneath surface of carbon fiber reinforced composites using active infrared thermography. In Proceedings of the SPIE 9105 Thermosense: Thermal Infrared Applications XXXVI, Baltimore, MD, USA, 5–7 May 2014; pp. 9105–9109. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Image | Training | Validation | Test |
|---|---|---|---|
| PCT | 91.3% | 68.2% | 71.6% |
| PTT | 88.6% | 55.7% | 71.6% |
| DTT | 80.6% | 61.4% | 71.6% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fernandes, H.; Zhang, H.; Figueiredo, A.; Malheiros, F.; Ignacio, L.H.; Sfarra, S.; Ibarra-Castanedo, C.; Guimaraes, G.; Maldague, X. Machine Learning and Infrared Thermography for Fiber Orientation Assessment on Randomly-Oriented Strands Parts. Sensors 2018, 18, 288. https://doi.org/10.3390/s18010288
Fernandes H, Zhang H, Figueiredo A, Malheiros F, Ignacio LH, Sfarra S, Ibarra-Castanedo C, Guimaraes G, Maldague X. Machine Learning and Infrared Thermography for Fiber Orientation Assessment on Randomly-Oriented Strands Parts. Sensors. 2018; 18(1):288. https://doi.org/10.3390/s18010288
Chicago/Turabian StyleFernandes, Henrique, Hai Zhang, Alisson Figueiredo, Fernando Malheiros, Luis Henrique Ignacio, Stefano Sfarra, Clemente Ibarra-Castanedo, Gilmar Guimaraes, and Xavier Maldague. 2018. "Machine Learning and Infrared Thermography for Fiber Orientation Assessment on Randomly-Oriented Strands Parts" Sensors 18, no. 1: 288. https://doi.org/10.3390/s18010288