
Data Acquisition Based on Stable Matching of Bipartite Graph in Cooperative Vehicle–Infrastructure Systems †

Abstract
:1. Introduction
2. Related Work
3. Network Scenario and Problem Statement
4. Data Acquisition via V2U Communications
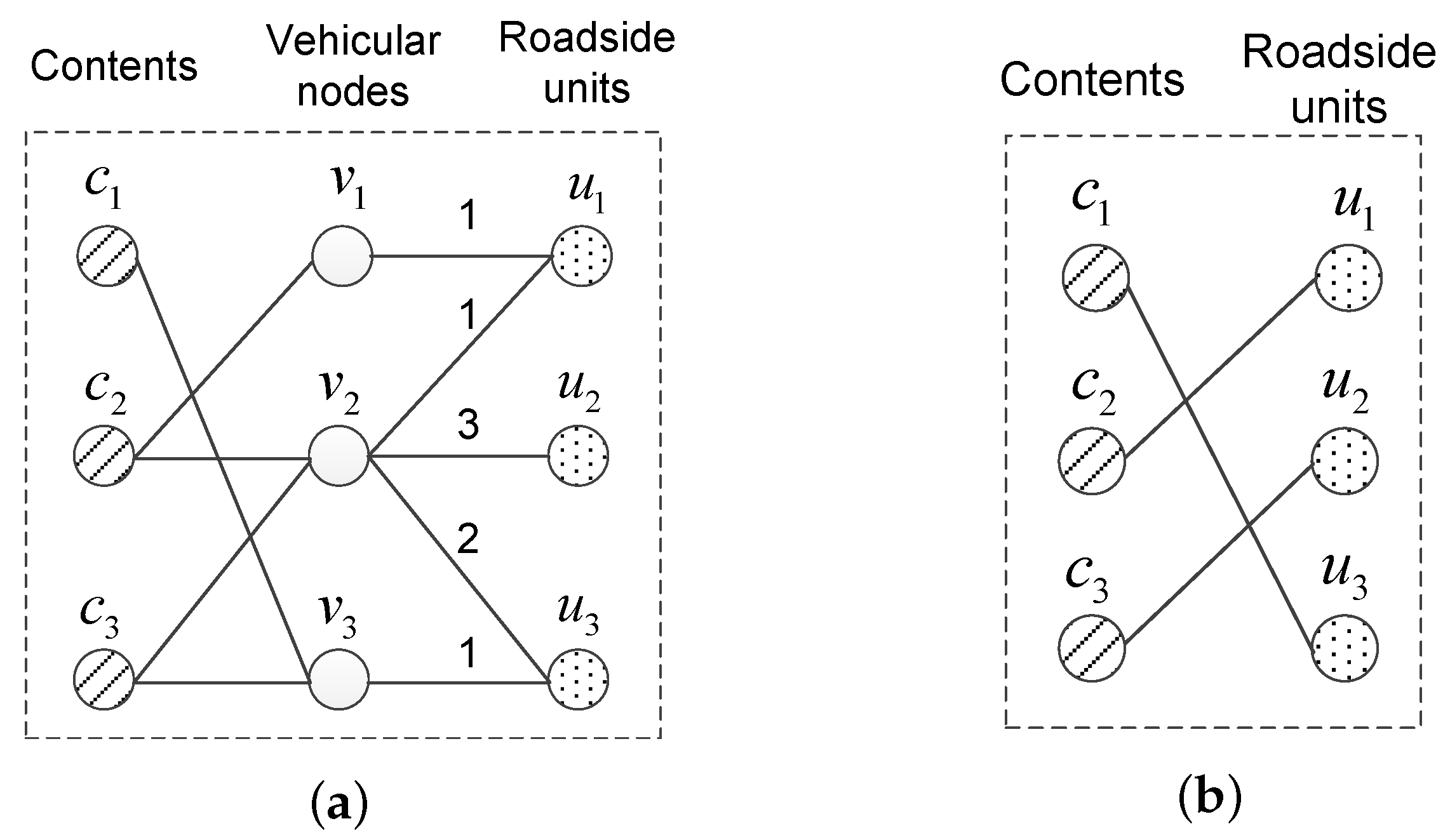
4.1. Data Distribution at Roadside Units Based on Stable Matching of Bipartite Graph
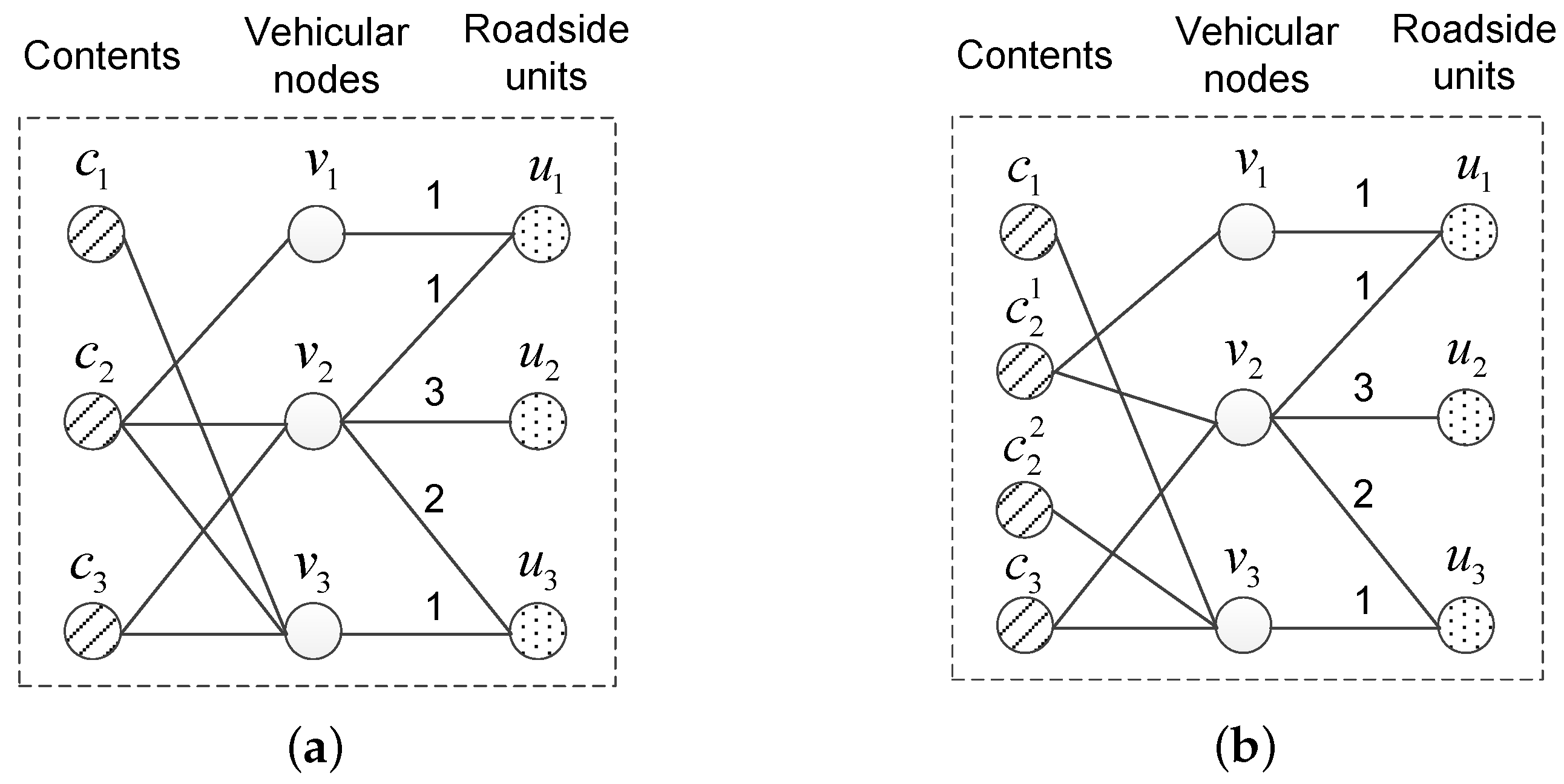
4.2. Multi-Replica Content Preprocessing Algorithm
| Algorithm 1: Multi-replica content preprocessing algorithm. |
 |
5. Data Acquisition via V2V Communications
5.1. Supplementary Storage at Vehicular Nodes
- (1)
- The selection of assistant contents. To increase the access ratio, the content selection depends on the transmission failures at roadside units and the routing plans of vehicular nodes. On the one hand, each roadside unit records its failed contents. When the transmission of a content from a roadside unit to a request sender fails due to bandwidth competition, finds the next roadside unit will meet, denoted by , from , and then increases the number of failed requests of related to the path from to , namely, the failure frequency, denoted by ( is initialized as 0 at the start of ). On the other hand, a roadside unit selects assistant contents according to the failure frequency. When requests an assistant content from , obtains from and sends a copy of the content having the biggest to .The selection of assistant contents gives priority to those having more unsatisfied requests, since there is a higher probability to meet the request senders. In addition, considering that vehicles only send data along its moving direction, different failure frequencies are calculated for different directions.
- (2)
- The lifetime of assistant contents. After receives an assistant content from , moves from to carrying and sends it to other vehicles requesting . The supplementary storage process ends with dropping when reaches .
- (3)
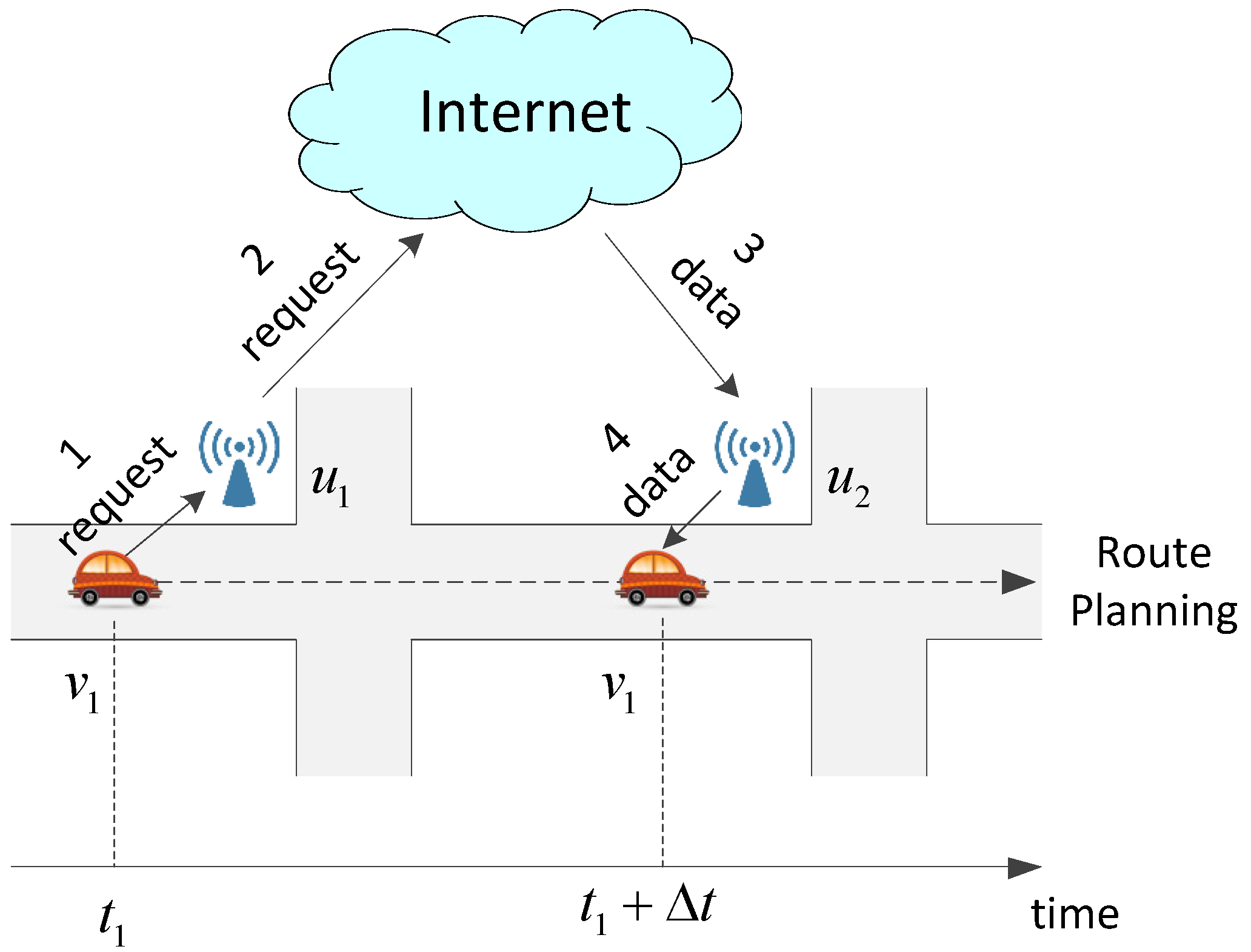
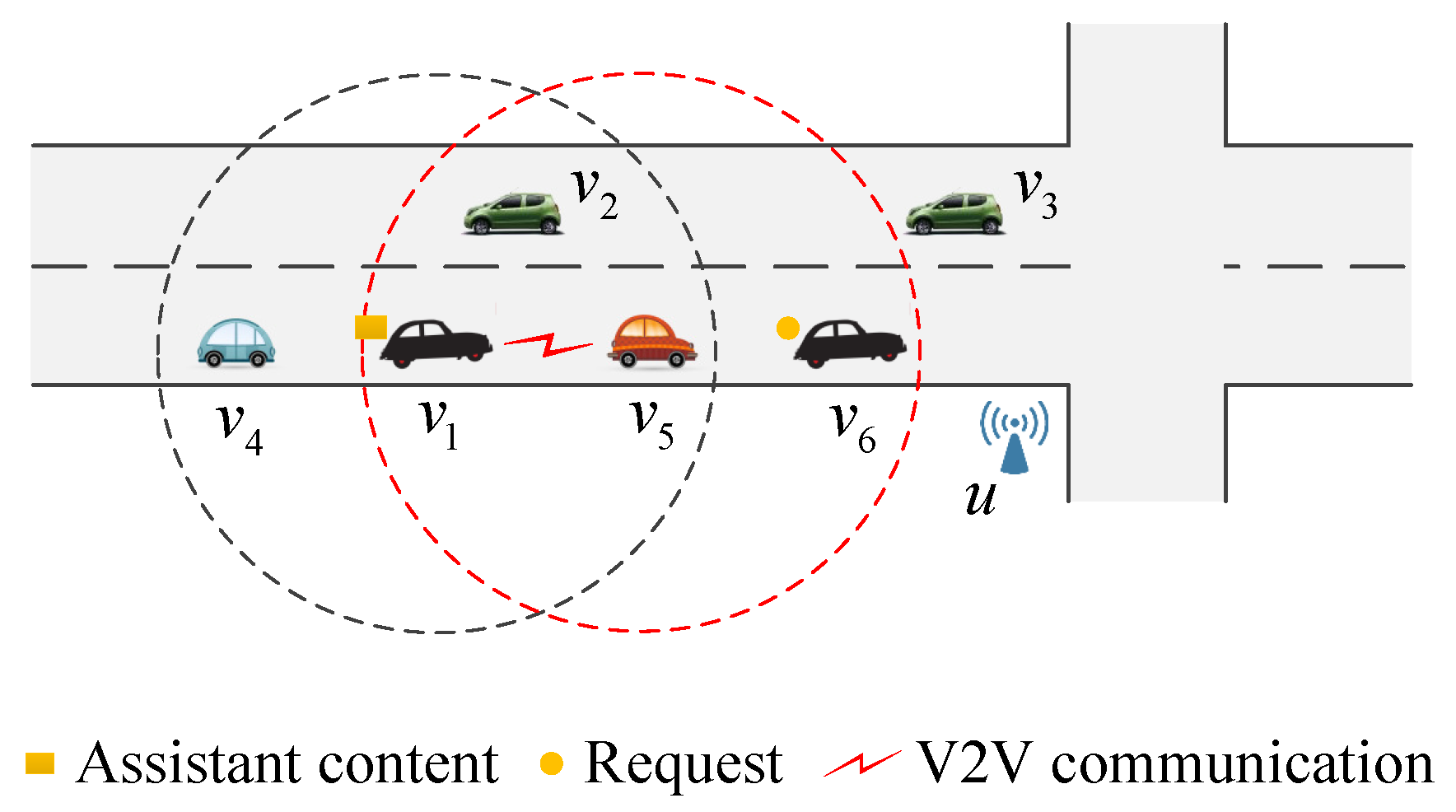
- The forwarding of assistant contents. In order to accelerate the transmission of assistant contents, when an assistant vehicle encounters other vehicles, it selects the neighbor in the same moving direction and nearest to the next roadside unit and then forwards the assistant content to this neighbor. As Figure 4 shows, a vehicle has an assistant content and its next roadside unit to meet is u. In V2V communication, has three neighbors, i.e., , and . According to the above method, since is the neighbor nearest to and moving for u, forwards the assistant content to . Furthermore, has a neighbor who requests this content, so replies to . It is apparent that the data forwarding helps to shorten the access latency.
5.2. Incentive Strategy for Supplementary Storage
- (1)
- How to gain the assistant score. A vehicular node gains its assistant score when it takes part in the supplementary storage. Specifically, when a vehicular node obtains assistant content from a roadside unit and carries it for a carry-recording time , gains a carrying score and updates its assistant score as ; when forwards an assistant content to its neighbor or delivers it to its request sender, gets a transmitting score and updates as . In the simulation experiments, we set s, , .
- (2)
- How to use the assistant score. As analyzed above, when several vehicles ask a roadside unit for different contents simultaneously, the roadside unit with limited bandwidth needs to send out these contents in some order. In our incentive strategy, this order is set based on the assistant scores of the request senders. In detail, the roadside unit computes the sum of the assistant scores of those vehicles requesting the same content, takes this value as the sending priority of the content, and sends these contents in descending order of their priorities until the communication chance passes by. For instance, four vehicular nodes, i.e., , , and , send content requests to a roadside unit u. Their assistant scores are 5, 6, 4 and 8, respectively. and would like the content , while and request . We get the sending priority of is and that of is . Since has a higher sending priority than , u sends to and first. Then, if the communication chance still exists, u sends to and .
6. Performance Evaluation
6.1. Network Configurations
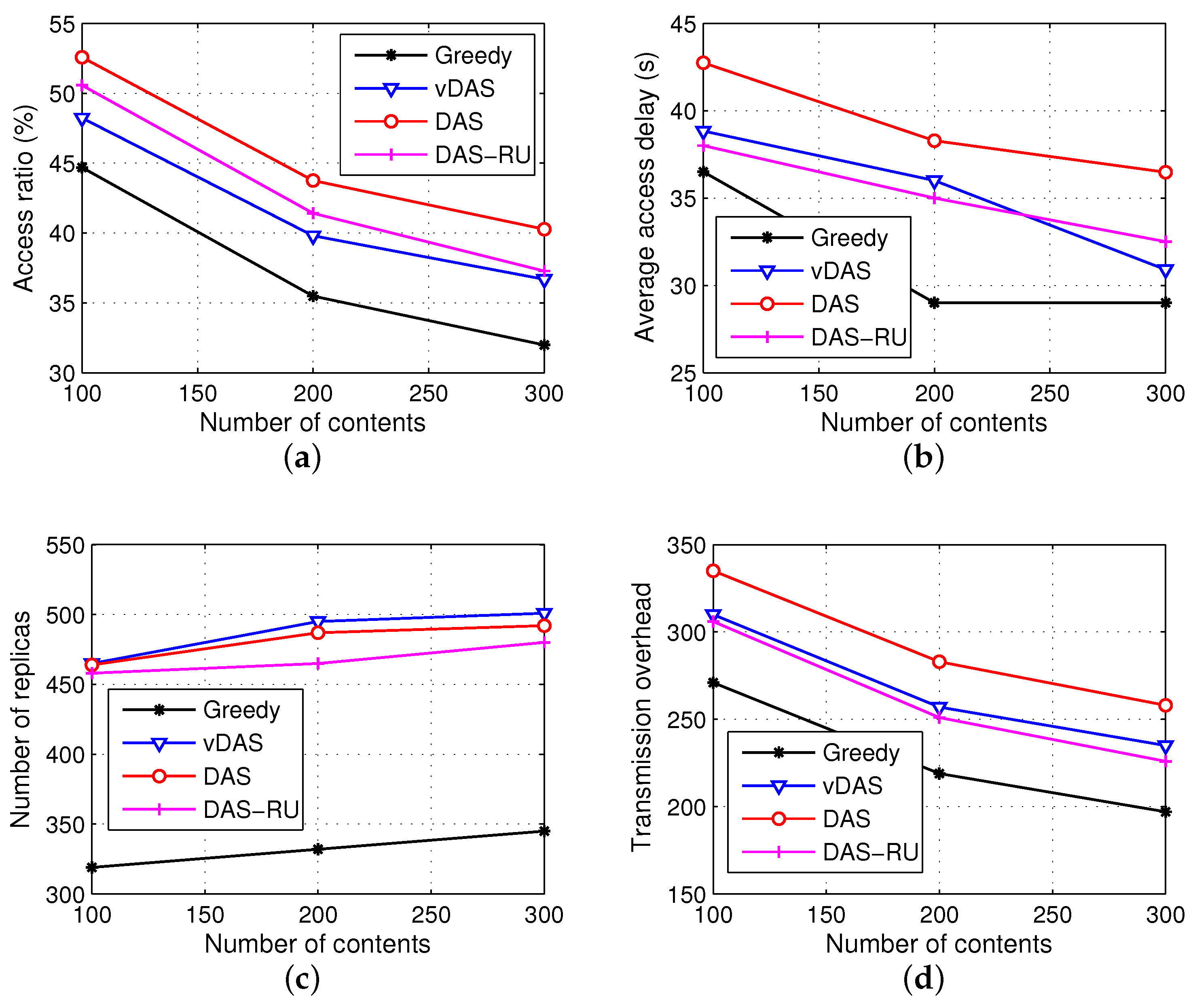
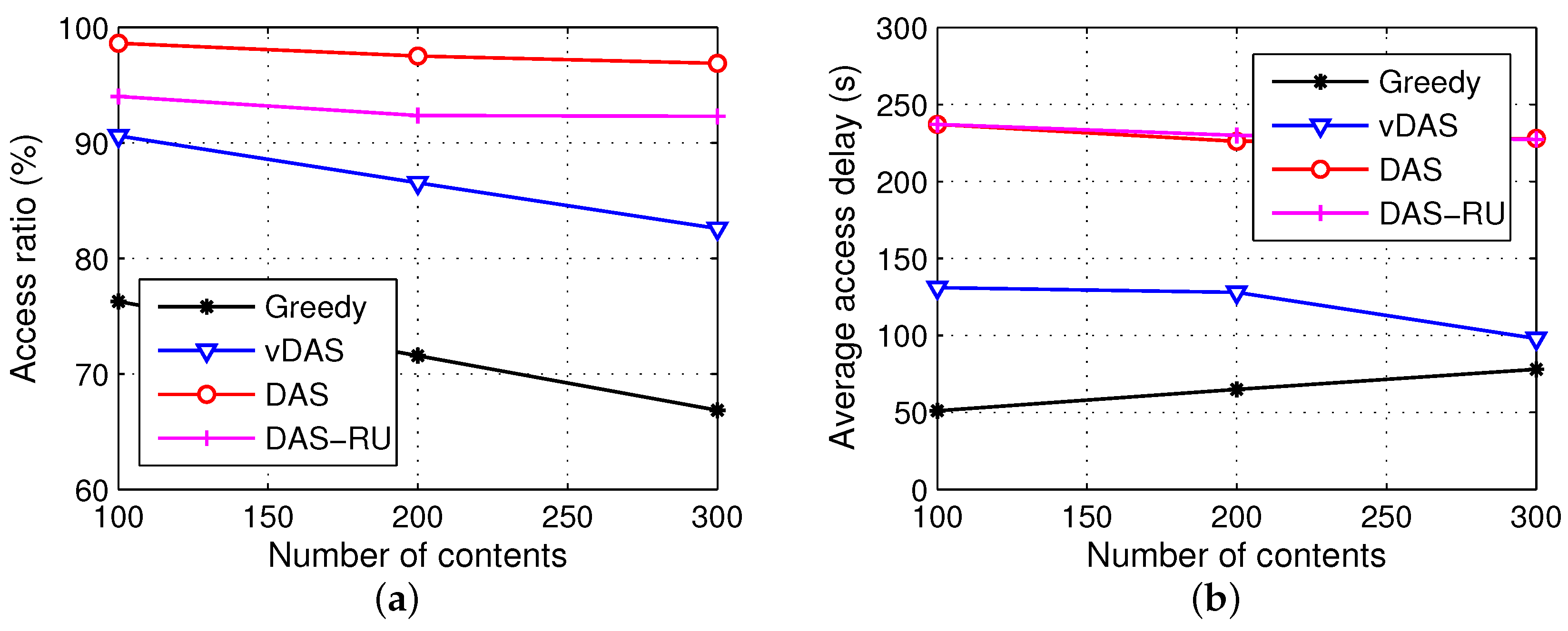
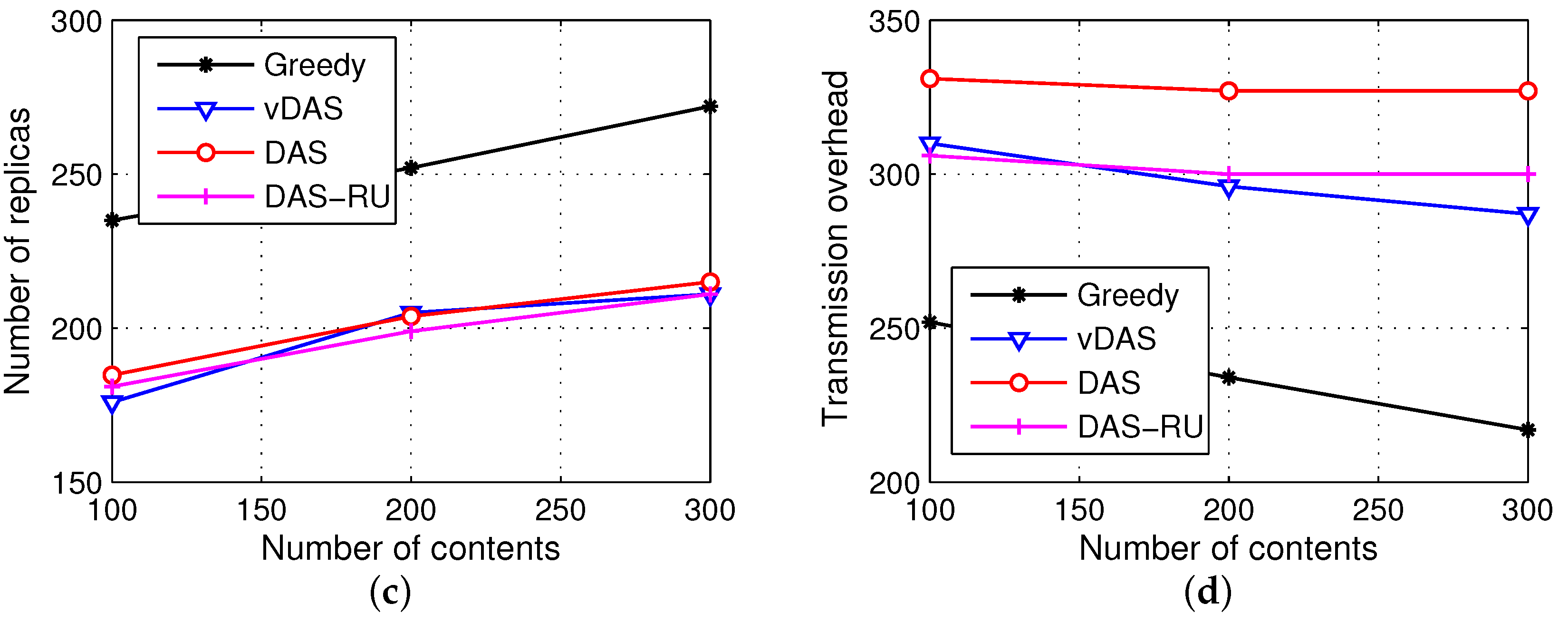
6.2. Simulation Results
6.3. Parameter Analysis
6.3.1. Storage Cycle Analysis
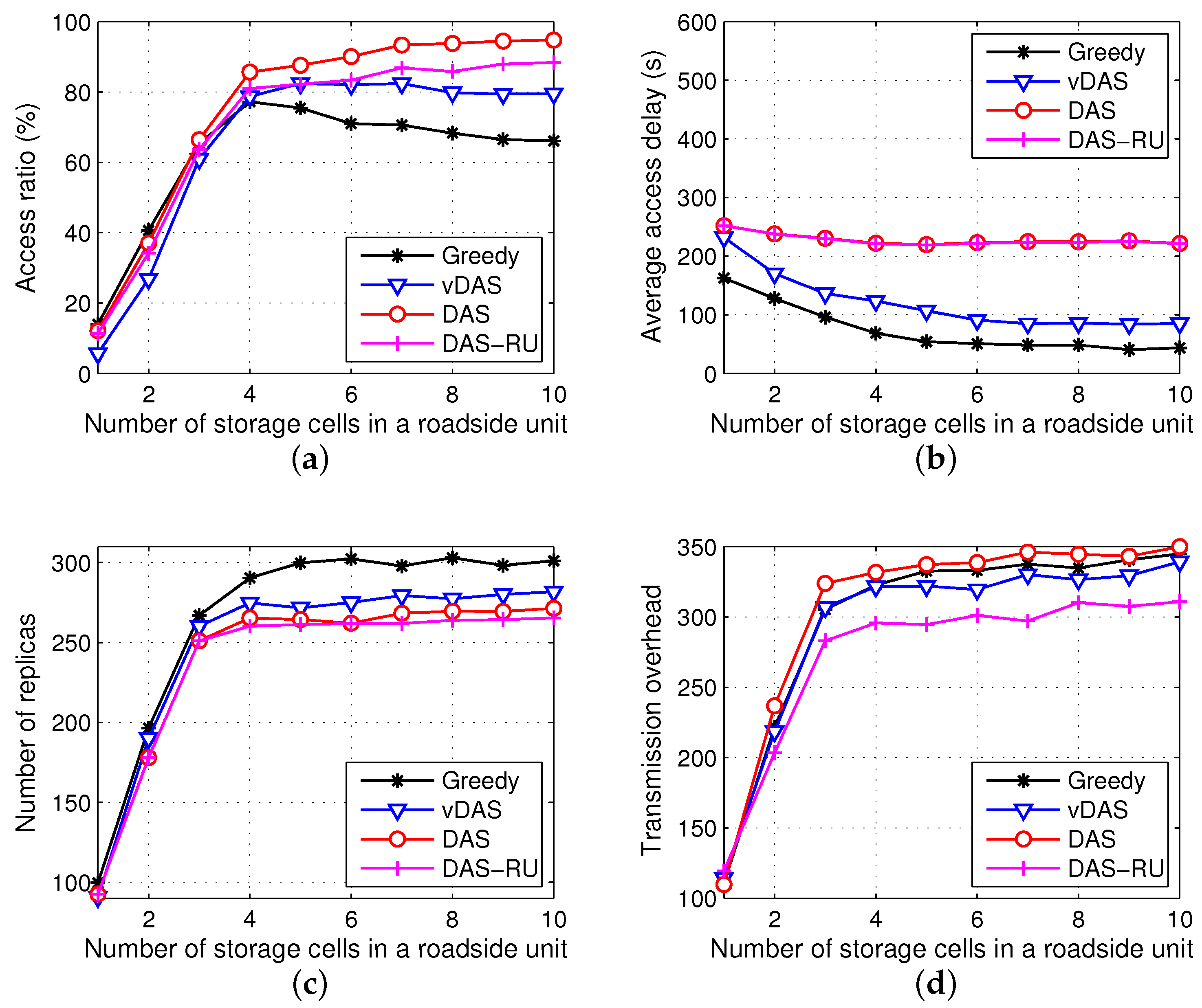
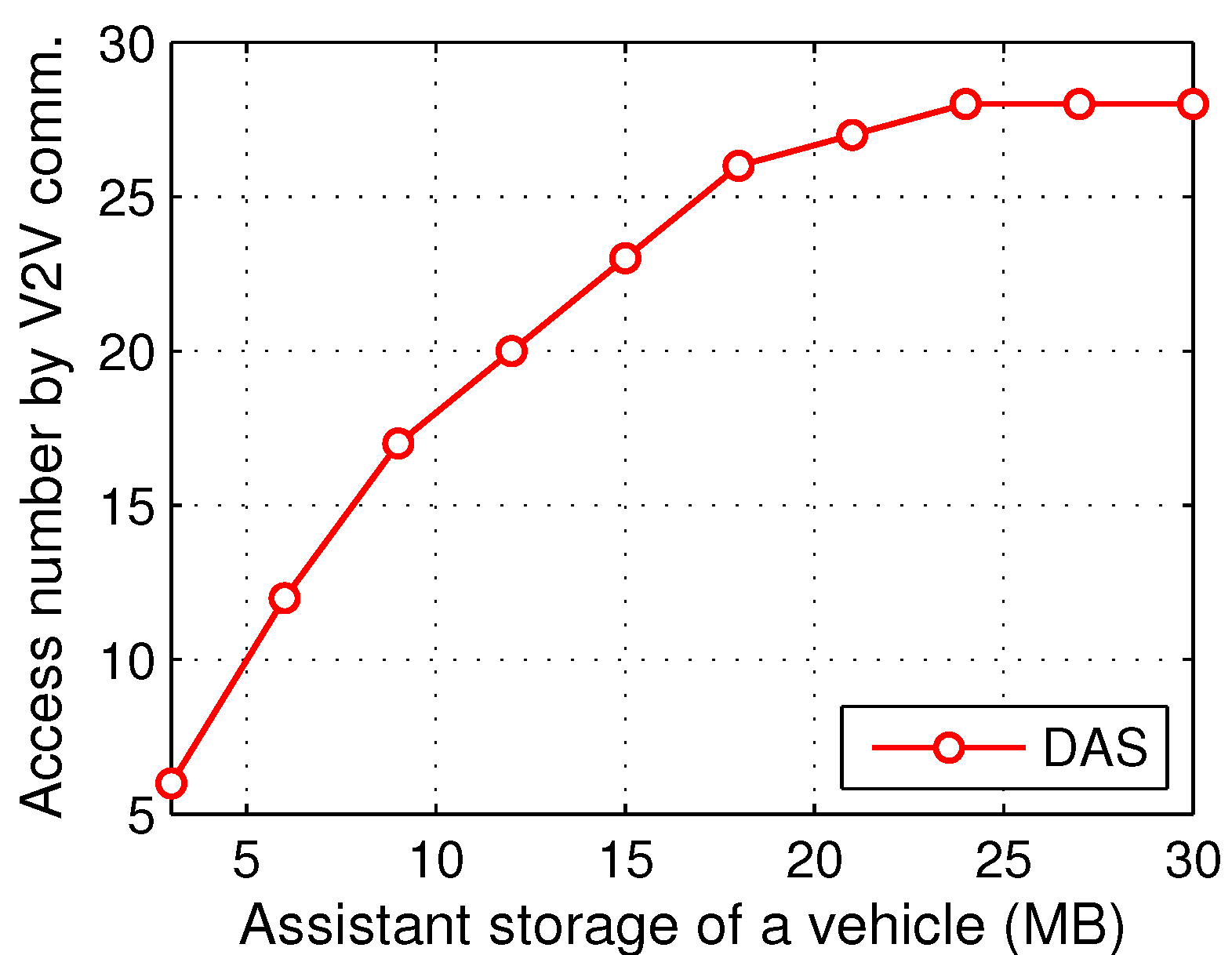
6.3.2. Assistant Storage Analysis
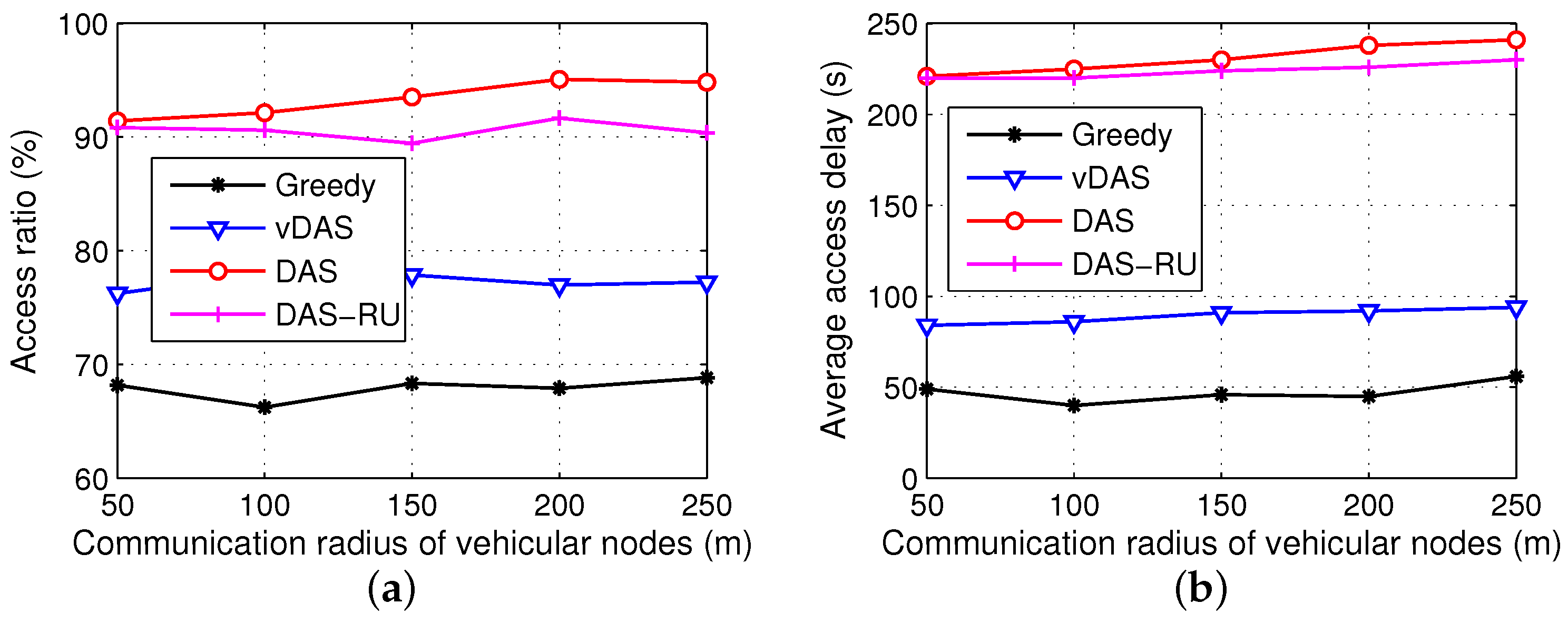
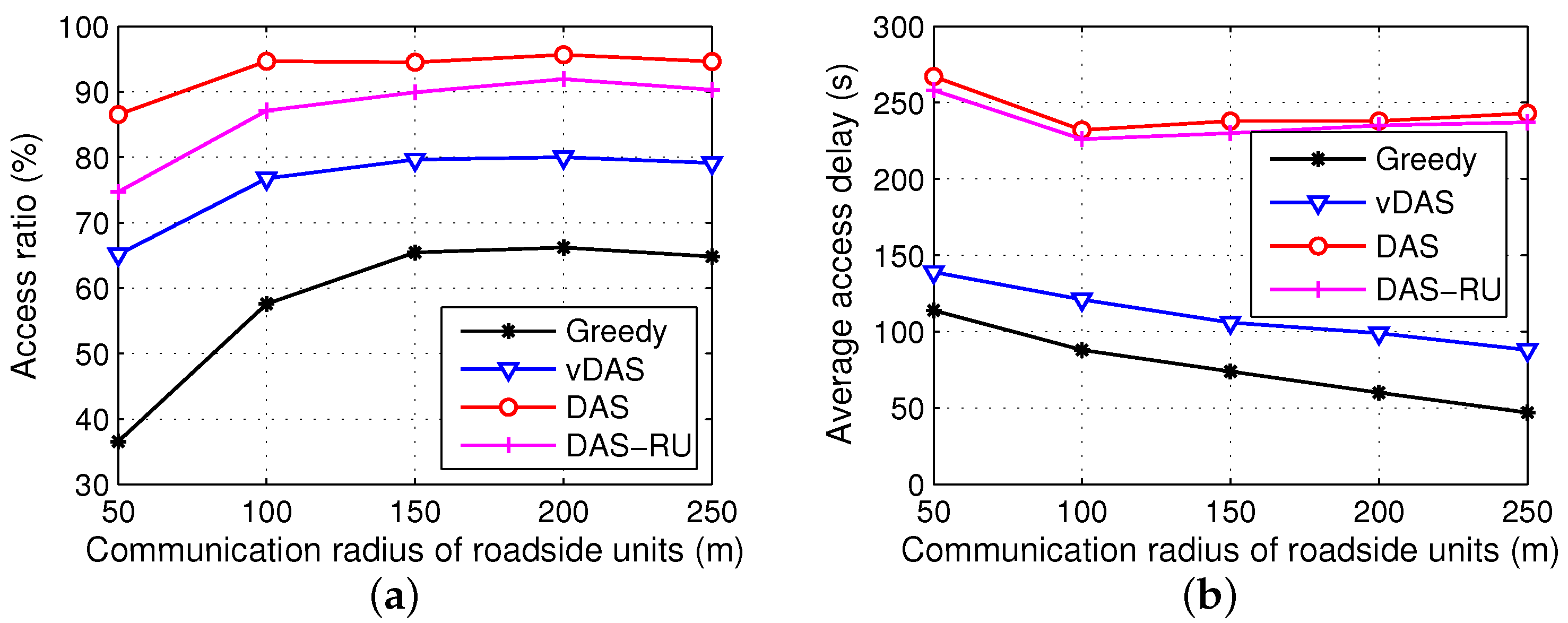
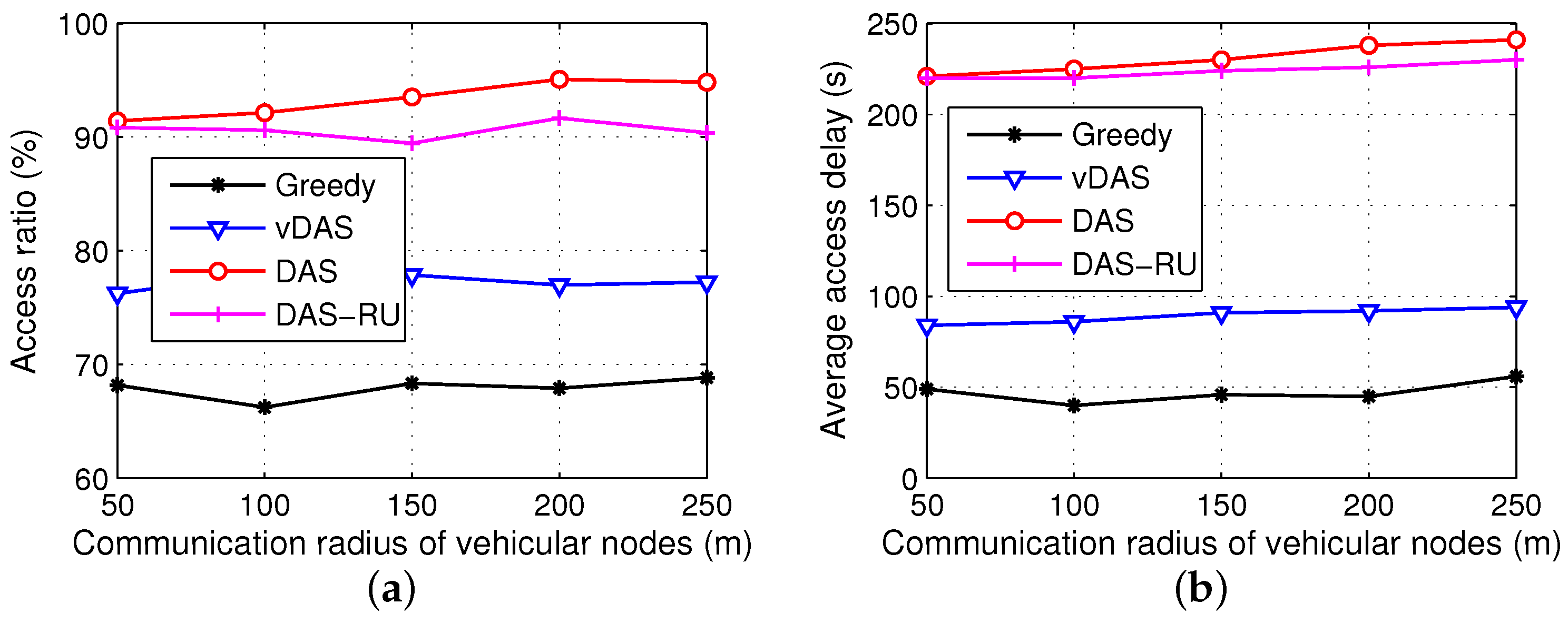
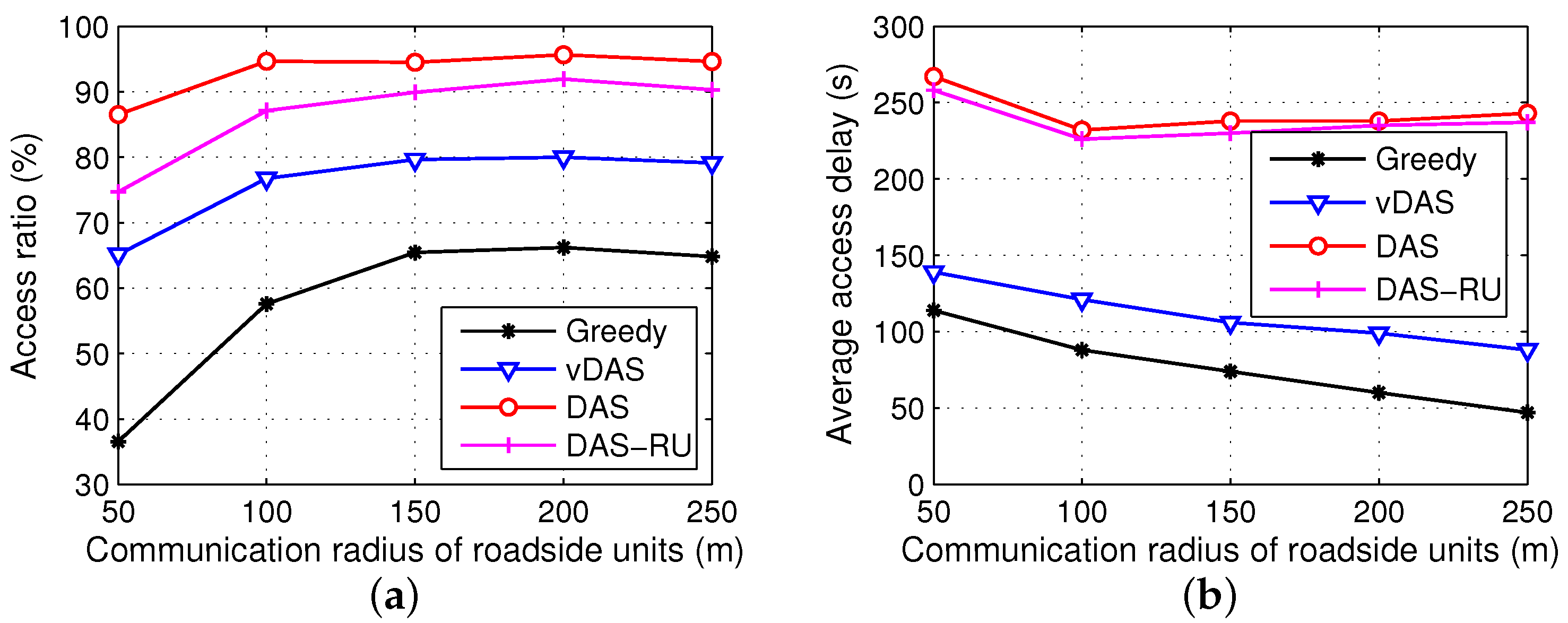
6.3.3. Communication Range Analysis
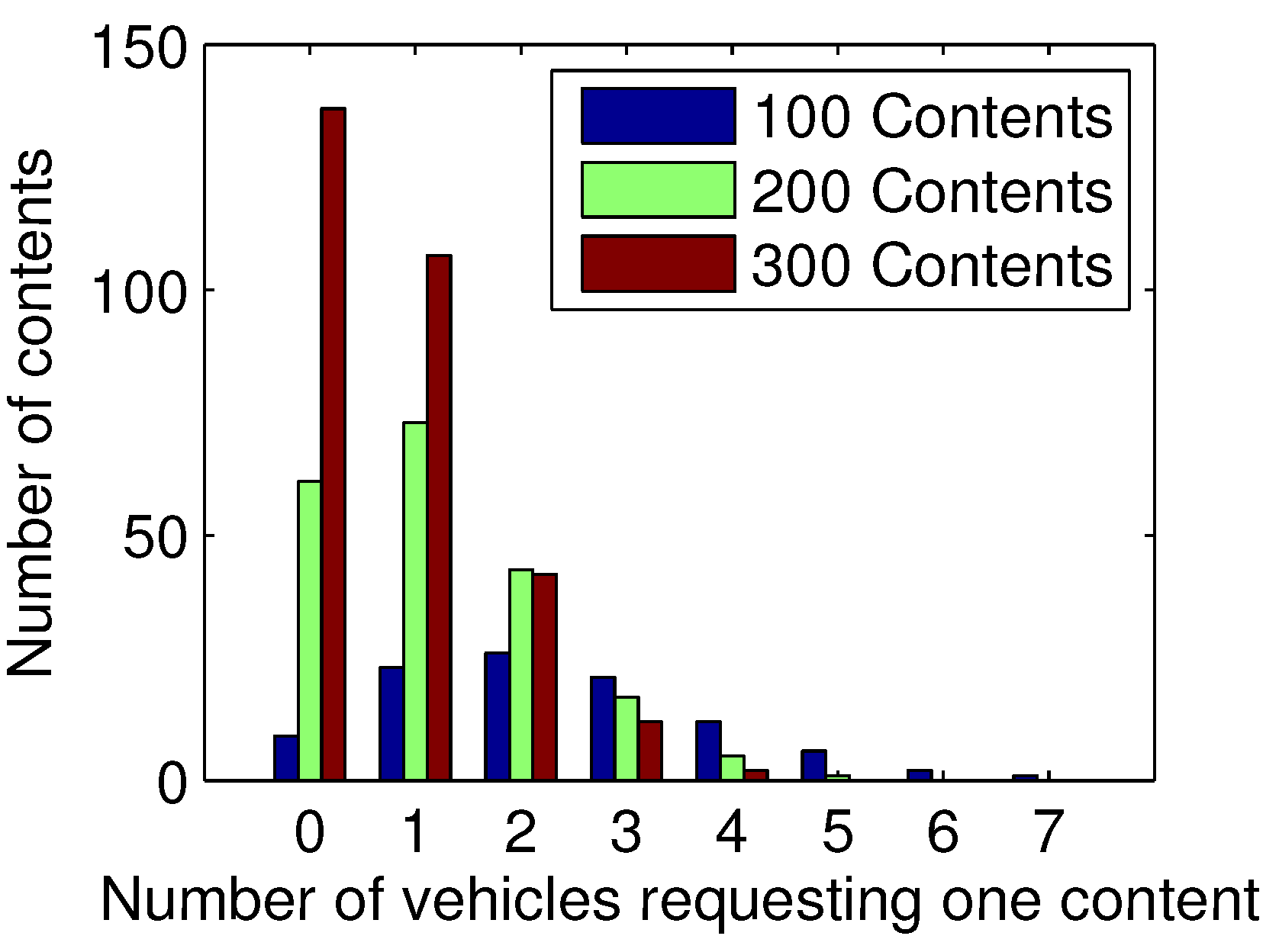
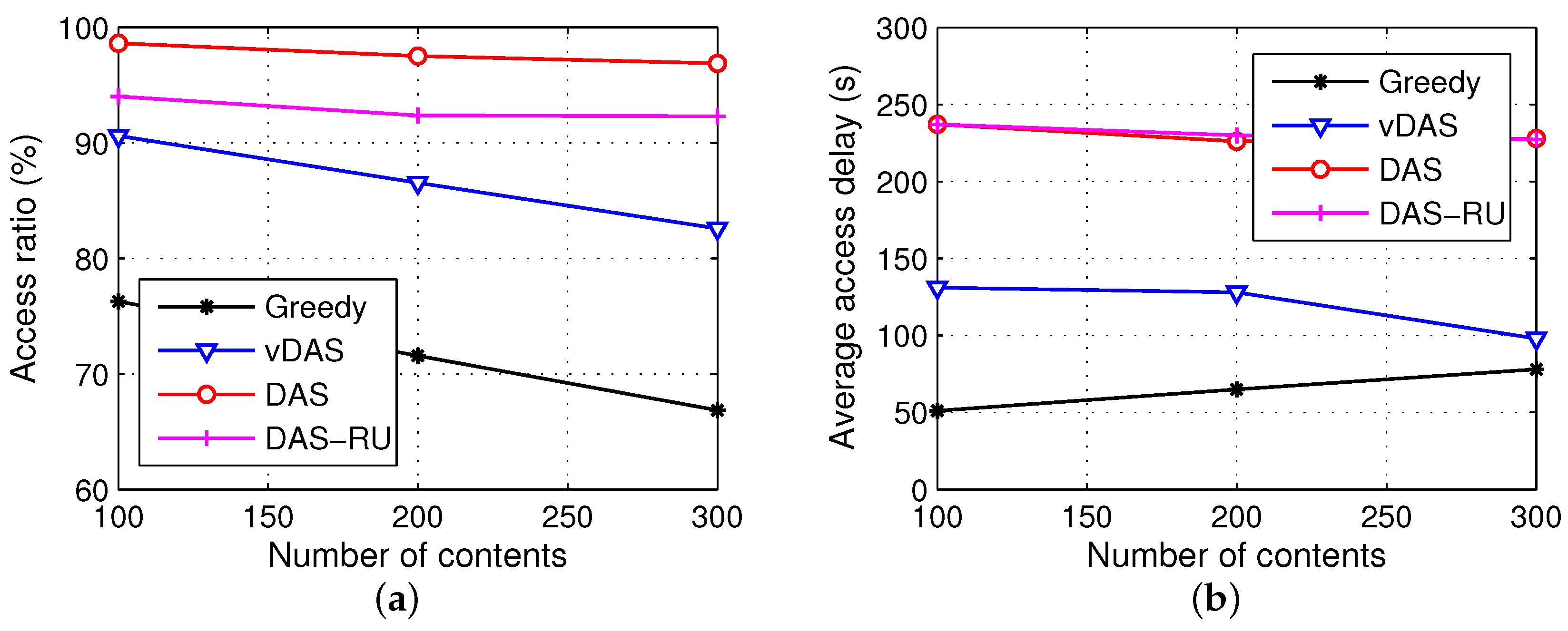
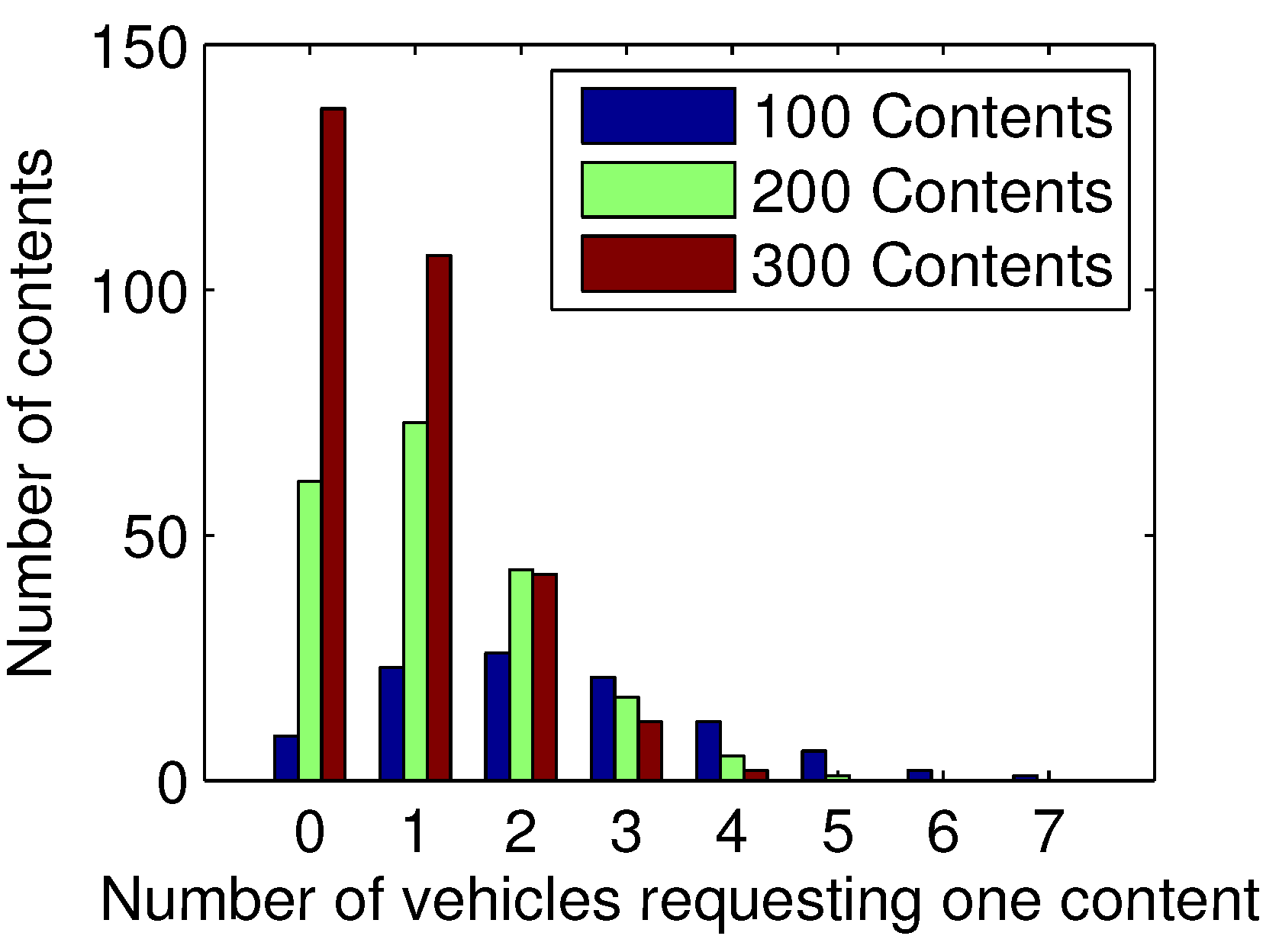
6.3.4. Request Model Analysis
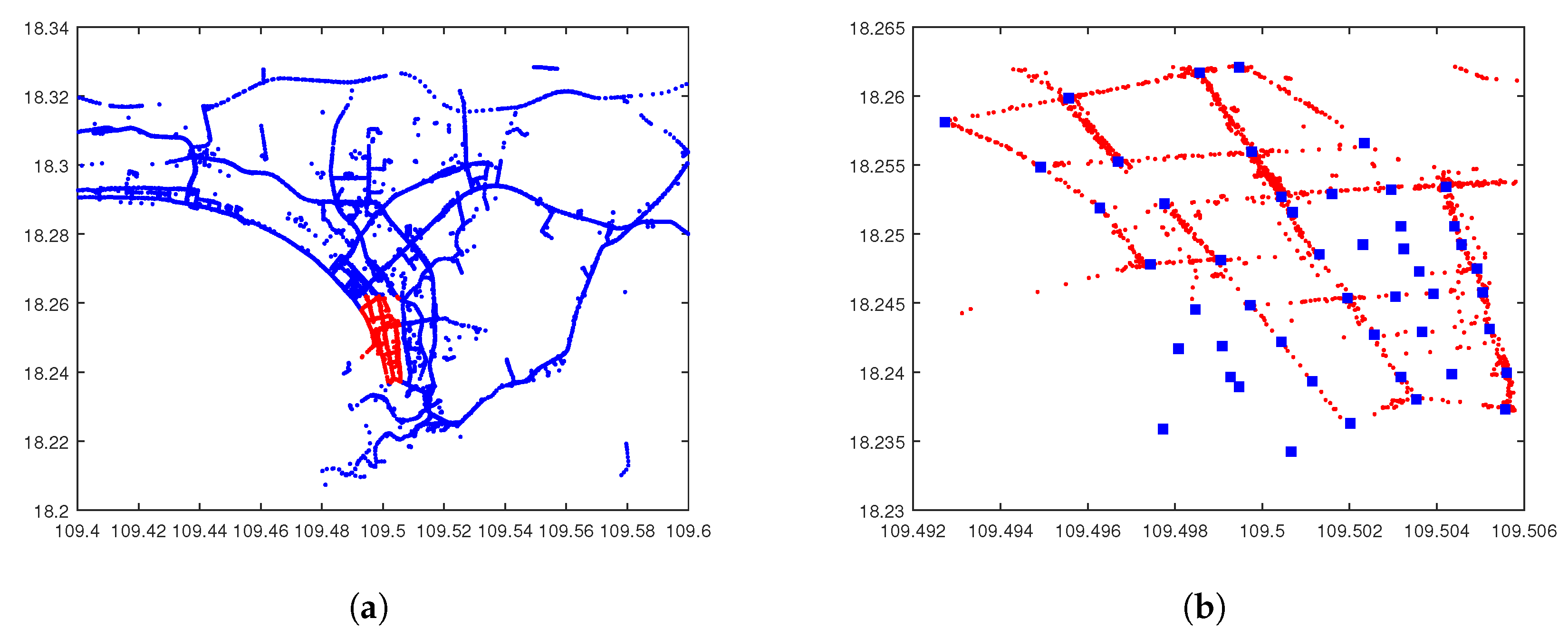
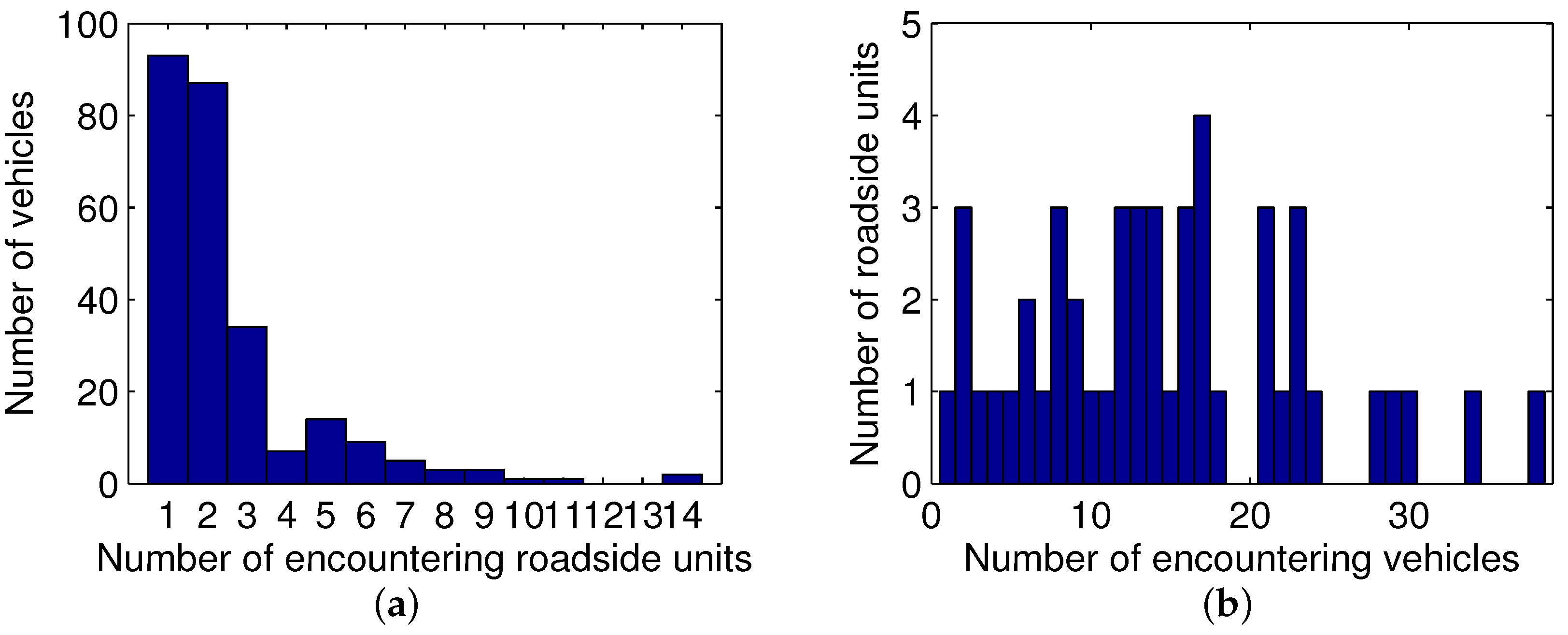
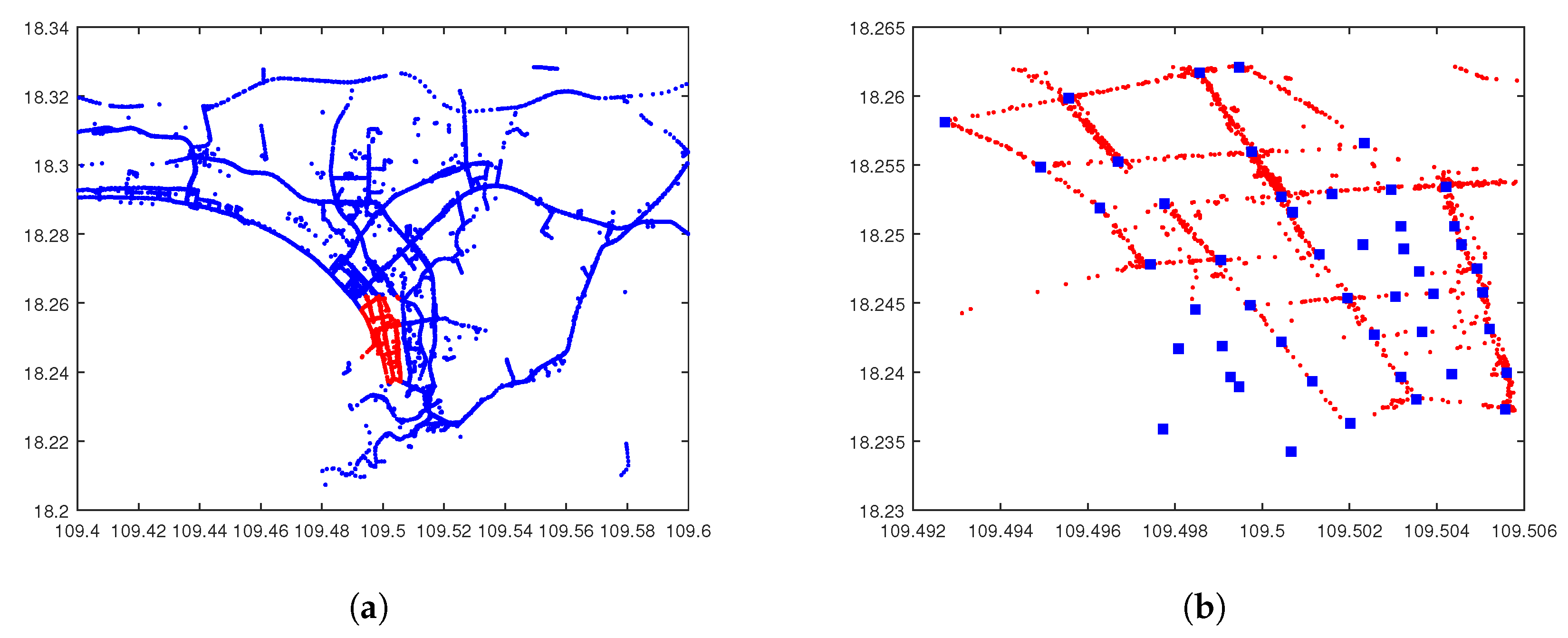
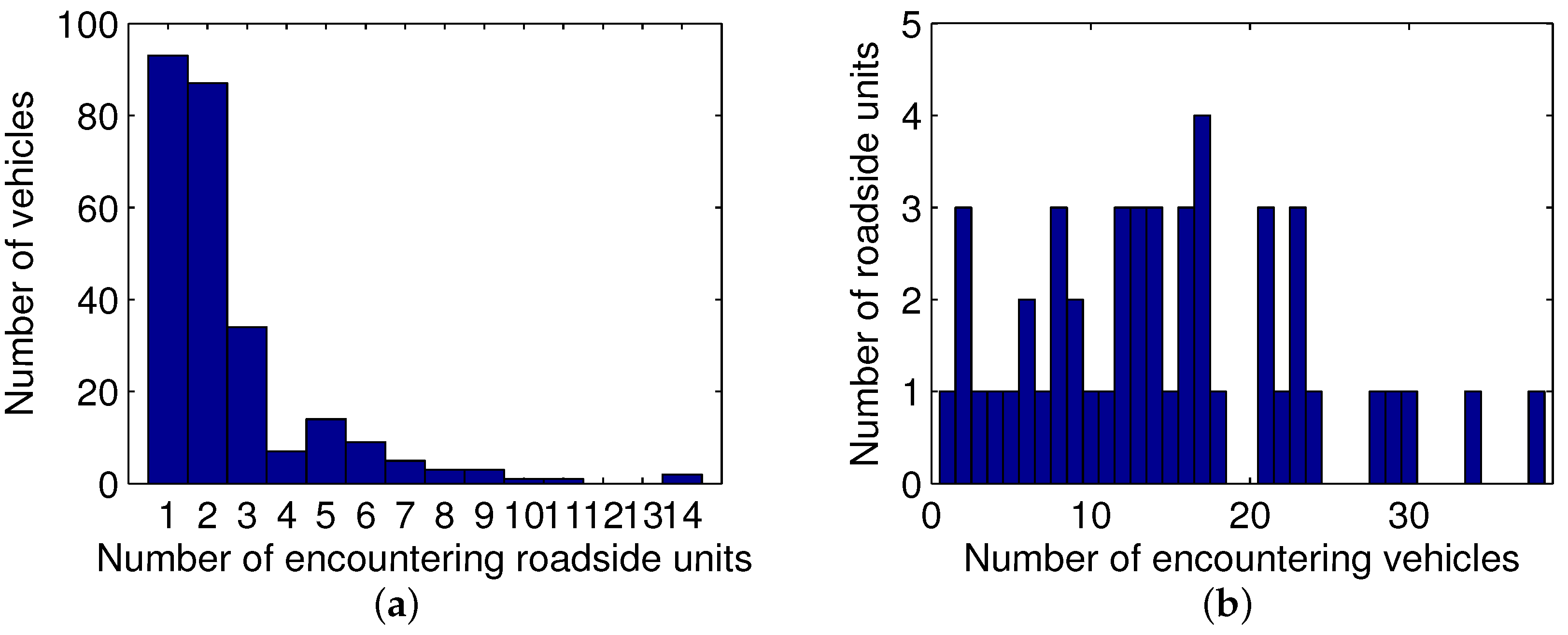
6.4. Performance Evaluation Using Real Taxi Trajectories
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kenney, J.B. Dedicated short-range communications (DSRC) standards in the United States. Proc. IEEE 2011, 99, 1162–1182. [Google Scholar] [CrossRef]
- Li, Y.; Zhu, X.; Jin, D.; Wu, D. Multiple Content Dissemination in Roadside-Unit-Aided Vehicular Opportunistic Networks. IEEE Trans. Veh. Technol. 2014, 63, 3947–3956. [Google Scholar] [CrossRef]
- Li, Y.; Jin, D.; Hui, P.; Chen, S. Contact-aware data replication in roadside unit aided vehicular delay tolerant networks. IEEE Trans. Mob. Comput. 2016, 15, 306–321. [Google Scholar] [CrossRef]
- Jiau, M.K.; Huang, S.C.; Hwang, J.N.; Vasilakos, A.V. Multimedia services in cloud-based vehicular networks. IEEE Intell. Transp. Syst. Mag. 2015, 7, 62–79. [Google Scholar] [CrossRef]
- Xu, C.; Quan, W.; Vasilakos, A.V.; Zhang, H.; Muntean, G.M. Information-centric cost-efficient optimization for multimedia content delivery in mobile vehicular networks. Comput. Commun. 2017, 99, 93–106. [Google Scholar] [CrossRef]
- Chen, B.H.; Huang, S.C.; Tsai, W.H. Eliminating Driving Distractions: Human-Computer Interaction with Built-in Applications. IEEE Veh. Technol. Mag. 2017, 12, 20–29. [Google Scholar] [CrossRef]
- Huang, S.C.; Chen, B.H.; Chou, S.K.; Hwang, J.N.; Lee, K.H. Smart Car. IEEE Comput. Intell. Mag. 2016, 11, 46–58. [Google Scholar] [CrossRef]
- Lin, D.; Wu, X.; Labeau, F.; Vasilakos, A. Internet of vehicles for E-health applications in view of EMI on medical sensors. J. Sens. 2015, 2015, 1–10. [Google Scholar] [CrossRef]
- Wang, S.; Wang, X.; Huang, J.; Bie, R.; Tian, Z.; Zhao, F. The Potential of Mobile Opportunistic Networks for Data Disseminations. IEEE Trans. Veh. Technol. 2016, 65, 912–922. [Google Scholar] [CrossRef]
- Wang, S.; Li, L.; Sun, W.; Guo, J.; Bie, R.; Lin, K. Context Sensing System Analysis for Privacy Preservation Based on Game Theory. Sensors 2017, 17, 339. [Google Scholar] [CrossRef] [PubMed]
- Tang, X.; Hong, D.; Chen, W. Content Replication Scheme Using Stable Matching in Vehicular Networks. In Proceedings of the International Conference on Identification, Information and Knowledge in the Internet of Things (IIKI), Beijing, China, 20–21 October 2016; pp. 1–6. [Google Scholar]
- Jaho, E.; Koukoutsidis, I.; Stavrakakis, I.; Jaho, I. Cooperative content replication in networks with autonomous nodes. Comput. Commun. 2012, 35, 637–647. [Google Scholar] [CrossRef]
- Caviglione, L.; Cervellera, C. An optimized content replication and distribution framework for vehicular networks. J. Intell. Transp. Syst. 2011, 15, 179–192. [Google Scholar] [CrossRef]
- Kapadia, S.; Krishnamachari, B.; Ghandeharizadeh, S. Static replication strategies for content availability in vehicular ad-hoc networks. Mob. Netw. Appl. 2009, 14, 590–610. [Google Scholar] [CrossRef]
- Kumar, N.; Kim, J. Probabilistic trust aware data replica placement strategy for online video streaming applications in vehicular delay tolerant networks. Math. Comput. Model. 2013, 58, 3–14. [Google Scholar] [CrossRef]
- Zhuo, X.; Li, Q.; Gao, W.; Cao, G.; Dai, Y. Contact Duration Aware Data Replication in Delay Tolerant Networks. In Proceedings of the IEEE International Conference on Network Protocols (ICNP), Vancouver, AB, Canada, 17–20 October 2011; pp. 236–245. [Google Scholar]
- La, C.; Michiardi, P.; Casetti, C.; Chiasserini, C.; Fiore, M. Content replication in mobile networks. IEEE J. Sel. Areas Commun. 2012, 30, 1762–1770. [Google Scholar] [CrossRef]
- Wu, Y.; Zhu, Y.; Zhu, H.; Li, B. CCR: Capacity-Constrained Replication for Data Delivery in Vehicular Networks. Proceedings of IEEE International Conference on Computer Communications (INFOCOM), Turin, Italy, 14–19 April 2013; pp. 2580–2588. [Google Scholar]
- Silva, F.A.; Boukerche, A.; Silva, T.R.B.; Benevenuto, F.; Ruiz, L.B.; Loureiro, A.A. ODCRep: Origin–Destination-Based Content Replication for Vehicular Networks. IEEE Trans. Veh. Technol. 2015, 64, 5563–5574. [Google Scholar] [CrossRef]
- Silva, F.A.; Boukerche, A.; Silva, T.R.B.; Ruiz, L.B.; Loureiro, A.A. Geo-localized content availability in VANETs. Ad Hoc Netw. 2016, 36, 425–434. [Google Scholar] [CrossRef]
- Silva, C.M.; Aquino, A.L.; Meira, W. Design of roadside infrastructure for information dissemination in vehicular networks. In Proceedings of the IEEE International Conference on Network Operations and Management Symposium (NOMS), Krakow, Poland, 5–9 May 2014; pp. 1–8. [Google Scholar]
- Reis, A.B.; Sargento, S.; Neves, F.; Tonguz, O.K. Deploying roadside units in sparse vehicular networks: What really works and what does not. IEEE Trans. Veh. Technol. 2014, 63, 2794–2806. [Google Scholar] [CrossRef]
- Silva, C.M.; Aquino, A.L.; Meira, W. Deployment of roadside units based on partial mobility information. Comput. Commun. 2015, 60, 28–39. [Google Scholar] [CrossRef]
- Silva, C.M.; Meira, W.; Sarubbi, J.F. Non-intrusive planning the roadside infrastructure for vehicular networks. IEEE Trans. Intell. Transp. Syst. 2016, 17, 938–947. [Google Scholar] [CrossRef]
- Silva, C.M.; Silva, F.A.; Sarubbi, J.F.; Oliveira, T.R.; Meira, W.; Nogueira, J.M.S. Designing mobile content delivery networks for the internet of vehicles. Veh. Commun. 2016, 8, 1–11. [Google Scholar] [CrossRef]
- Silva, C.M.; Guidoni, D.L.; Souza, F.S.; Pitangui, C.G.; Sarubbi, J.F.; Pitsillides, A. Gamma Deployment: Designing the Communication Infrastructure in Vehicular Networks Assuring Guarantees on the V2I Inter-Contact Time. In Proceedings of the IEEE 13th International Conference on Mobile Ad Hoc and Sensor Systems (MASS), Brasilia, Brazil, 10–13 October 2016; pp. 263–271. [Google Scholar]
- Luan, T.H.; Cai, L.X.; Chen, J.; Shen, X.S.; Bai, F. Engineering a distributed infrastructure for large-scale cost-effective content dissemination over urban vehicular networks. IEEE Trans. Veh. Technol. 2014, 63, 1419–1435. [Google Scholar] [CrossRef]
- Roth, A.E. Deferred Acceptance Algorithms: History, Theory, Practice, and Open Questions. Int. J. Game Theory 2007, 36, 537–569. [Google Scholar] [CrossRef]
- Erdil, A.; Ergin, H. What’s the Matter with Tie-breaking? Improving Efficiency in School Choice. Am. Econ. Rev. 2008, 98, 669–689. [Google Scholar] [CrossRef]
- Gale, D.; Shapley, L.S. College admissions and the stability of marriage. Am. Math. Mon. 1962, 69, 9–15. [Google Scholar] [CrossRef]
- Joao, A.F.F.D.; Joel, J.P.C.R.; Joao, N.G.I.; Niu, J. The impact of cooperative nodes on the performance of vehicular delay-tolerant networks. Mob. Netw. Appl. 2013, 18, 867–878. [Google Scholar]
- Harri, J.; Filali, F.; Bonnet, C. Mobility models for vehicular ad hoc networks: A survey and taxonomy. IEEE Commun. Surv. Tutor. 2009, 11, 19–41. [Google Scholar] [CrossRef]
- Tang, X.; Hong, D.; Chen, W.; Pu, J. Distributed Storage Scheme Using Bipartite Graph Matching for Vehicular Networks. J. Softw. 2016, 27, 2377–2388. [Google Scholar]
- Wu, X.; Subramanian, S.; Guha, R.; White, R.G.; Li, J.; Lu, K.W.; Zhang, T. Vehicular communications using DSRC: Challenges, enhancements, and evolution. IEEE J. Sel. Areas Commun. 2013, 31, 399–408. [Google Scholar]
- Rezgui, J.; Cherkaoui, S. About Deterministic and Non-Deterministic Vehicular Communications over DSRC/802.11p. Wirel. Commun. Mob. Comput. 2014, 14, 1435–1449. [Google Scholar] [CrossRef]
- Wang, Q.; Fan, P.; Letaief, K.B. On the Joint V2I and V2V Scheduling for Cooperative VANETs with Network Coding. IEEE Trans. Veh. Technol. 2012, 61, 62–73. [Google Scholar] [CrossRef]
- Ministry of Transport of China. Taxi Trajectory Data in Sanya, Hainan Province, China. Available online: https://transportdata.cn/traffictravel/open/detail?id=188 (accessed on 10 January 2017).
- Malandrino, F.; Casetti, C.; Chiasserini, C.; Fiore, M. Content download in vehicular networks in presence of noisy mobility prediction. IEEE Trans. Mob. Comput. 2014, 13, 1007–1021. [Google Scholar] [CrossRef]
- Trullols-Cruces, O.; Fiore, M.; Barcelo-Ordinas, J. Cooperative download in vehicular environments. IEEE Trans. Mob. Comput. 2012, 11, 663–678. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| Vehicular nodes, . | |
| Roadside units, . | |
| Contents, . | |
| V | Index set of vehicular nodes, . |
| U | Index set of roadside units, . |
| C | Index set of contents, . |
| s | The size of content or a storage cell. |
| The number of storage cells in . | |
| F | Content request matrix, . |
| G | Encountering matrix, . |
| H | Encountering latency matrix, . |
| P | Preference profile of contents, . |
| Q | Priority ranking of storage cells, . |
| Current storage cycle. | |
| The next storage cycle. | |
| The lth replica of a content . | |
| Failure frequency of relevant with the path to . | |
| The assistant score of . |
| Ranking | ||||
|---|---|---|---|---|
| 0 | 0 | 1 | ||
| 2 | 1 | 1 | ||
| 1 | 1 | 2 |
| Ranking | ||||
|---|---|---|---|---|
| 4 | 1 | 1 | ||
| 4 | 3 | 3 | ||
| 1 | 2 | 1.5 |
| Parameter | Value |
|---|---|
| Network area | Grid network m, each grid m |
| Number of vehicles | 100 |
| Number of roadside units | , deployed at the intersections |
| Number of contents | 300 |
| Simulation time | 12,000 s |
| Storage cycle | 600 s |
| Communication radius | 250 m |
| Data rate | 5 Mbps |
| Mobility model | Map-based shortest path model [32] |
| Mobility velocity | 5.5∼16.5 m/s |
| Size of a content | 3 MB |
| Number of requests | A vehicle sends at most 5 requests in |
| Contents requested | Randomly selected |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, X.; Hong, D.; Chen, W. Data Acquisition Based on Stable Matching of Bipartite Graph in Cooperative Vehicle–Infrastructure Systems. Sensors 2017, 17, 1327. https://doi.org/10.3390/s17061327
Tang X, Hong D, Chen W. Data Acquisition Based on Stable Matching of Bipartite Graph in Cooperative Vehicle–Infrastructure Systems. Sensors. 2017; 17(6):1327. https://doi.org/10.3390/s17061327
Chicago/Turabian StyleTang, Xiaolan, Donghui Hong, and Wenlong Chen. 2017. "Data Acquisition Based on Stable Matching of Bipartite Graph in Cooperative Vehicle–Infrastructure Systems" Sensors 17, no. 6: 1327. https://doi.org/10.3390/s17061327