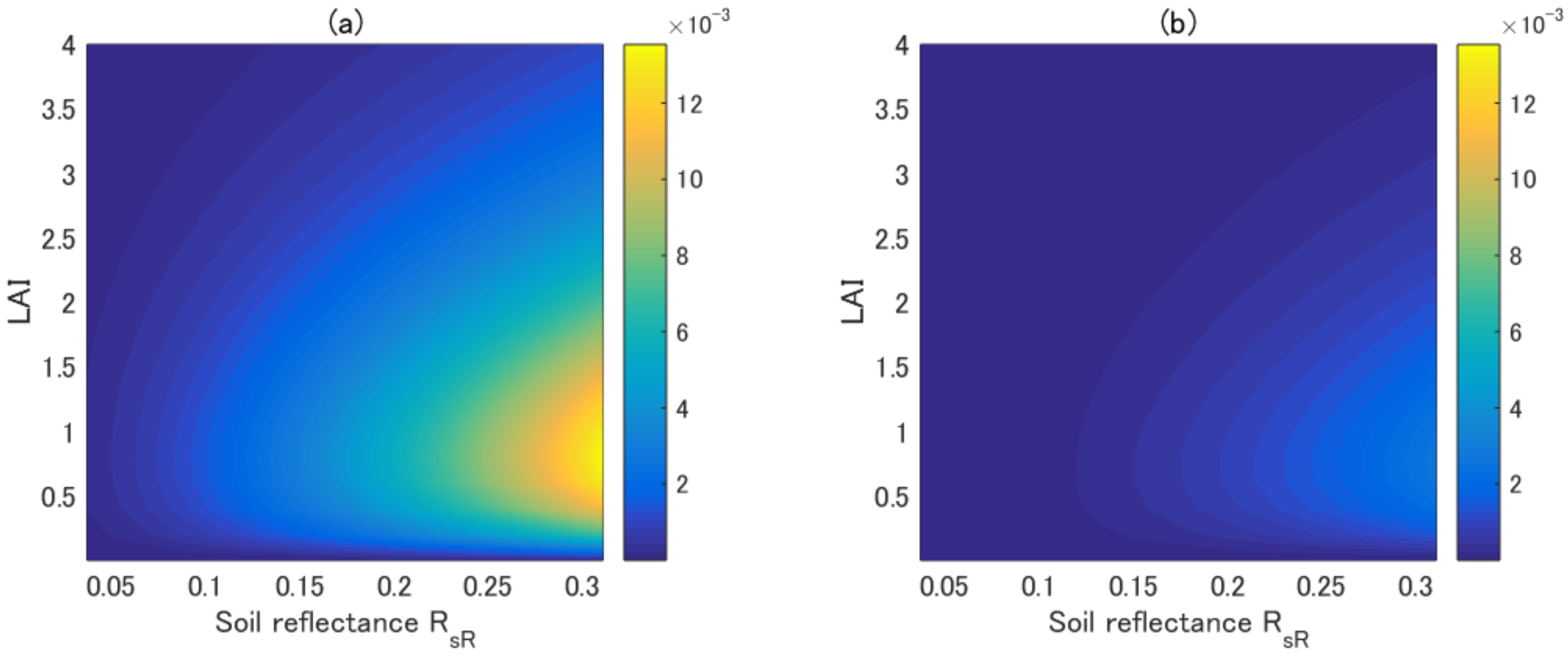
Figure 1.
(a) Error in the first-order isoline; and (b) error in the asymmetric-order isoline. LAI: leaf area index.
Figure 1.
(a) Error in the first-order isoline; and (b) error in the asymmetric-order isoline. LAI: leaf area index.
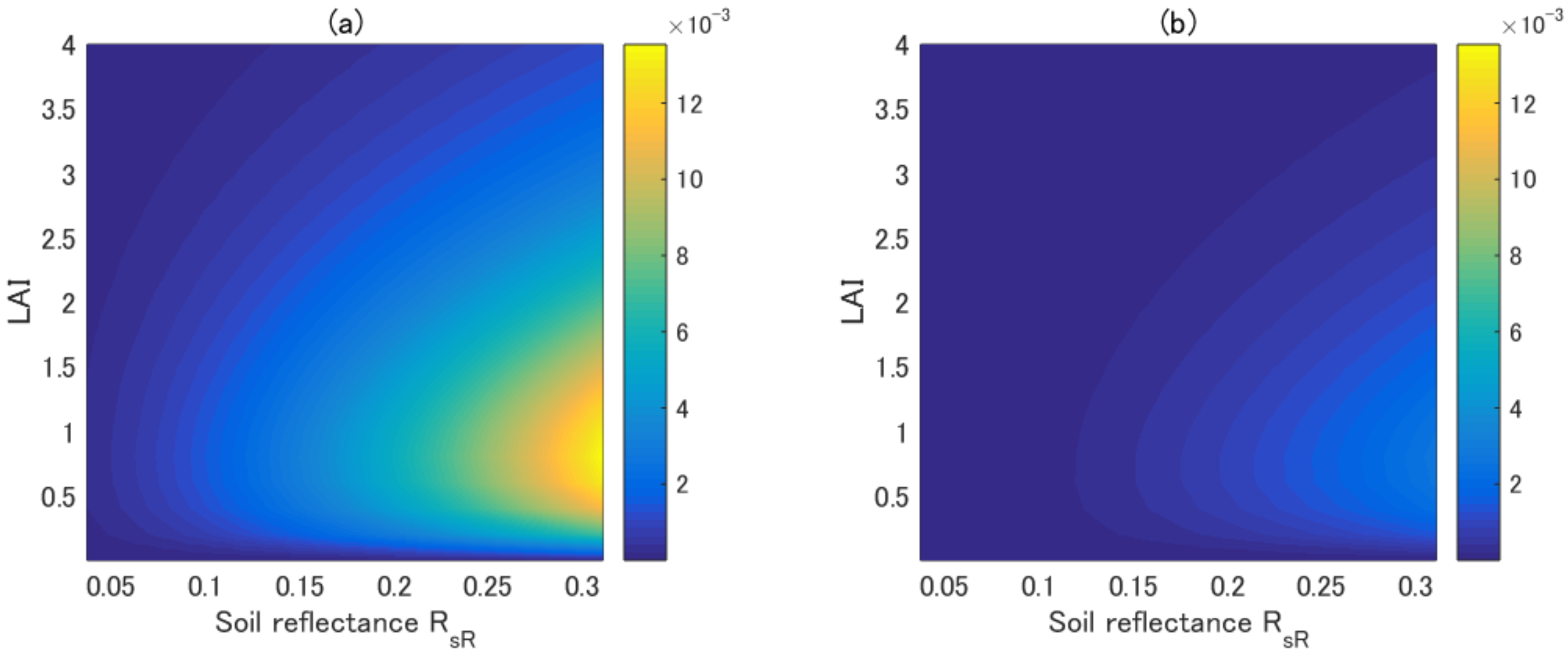
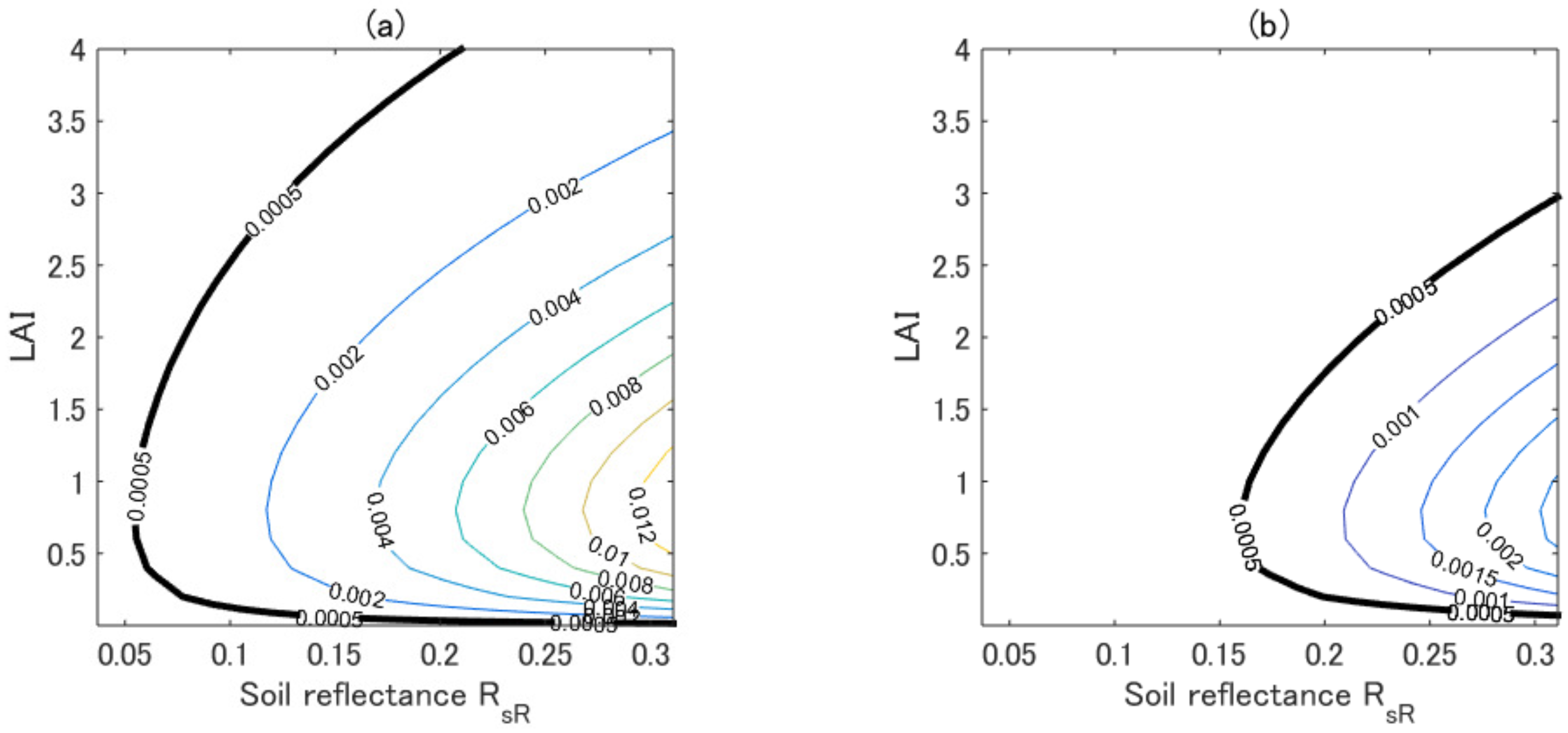
Figure 2.
Comparison of the errors in the vegetation isolines with the error (0.0005) computed from the noise corresponding to a signal-to-noise ration (SNR) of 200 at the NIR reflectance of 0.1. (a) The error in the first-order isoline; and (b) the error in the asymmetric-order isoline. The thick solid lines indicate the contour lines corresponding to 0.0005.
Figure 2.
Comparison of the errors in the vegetation isolines with the error (0.0005) computed from the noise corresponding to a signal-to-noise ration (SNR) of 200 at the NIR reflectance of 0.1. (a) The error in the first-order isoline; and (b) the error in the asymmetric-order isoline. The thick solid lines indicate the contour lines corresponding to 0.0005.
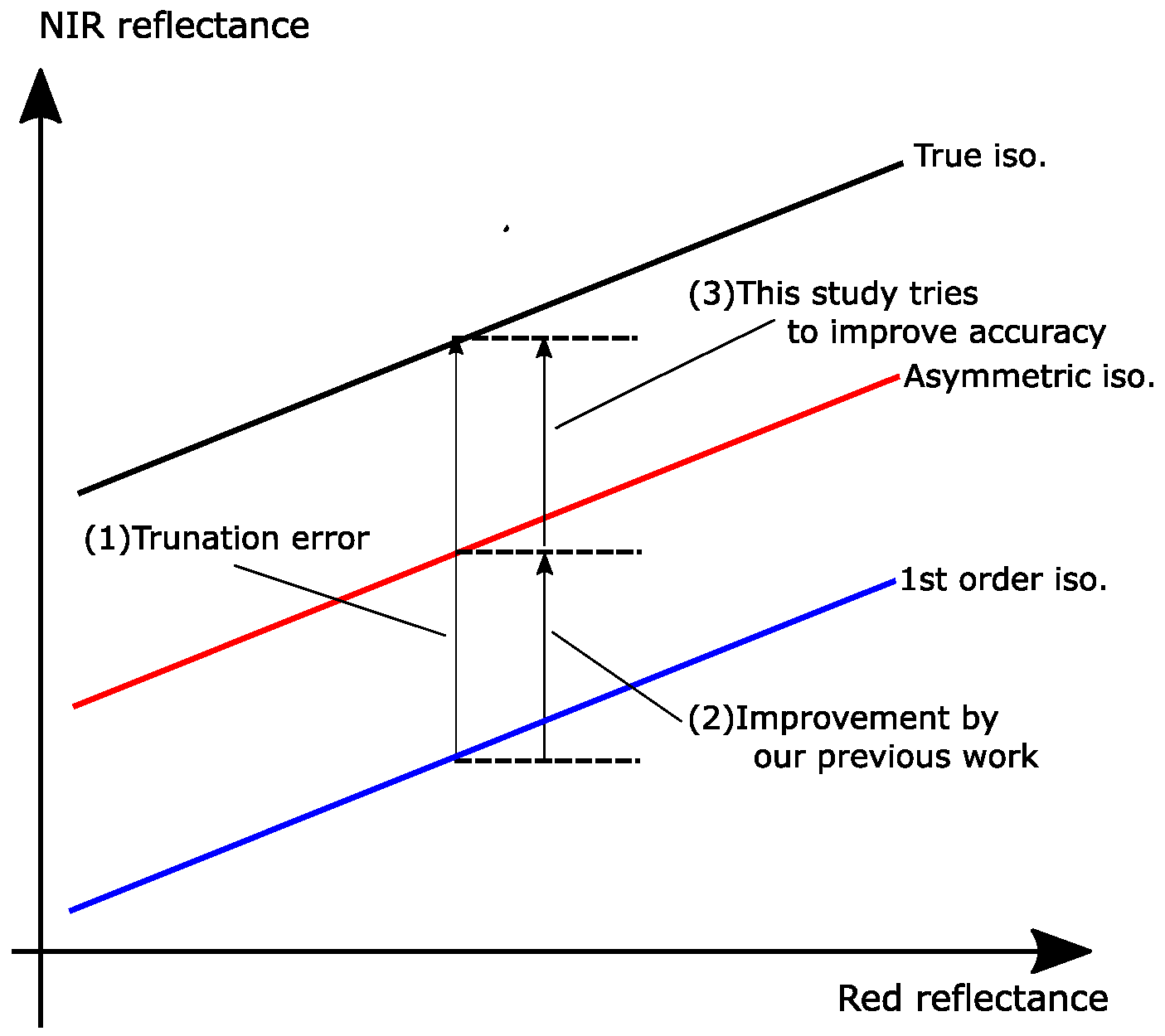
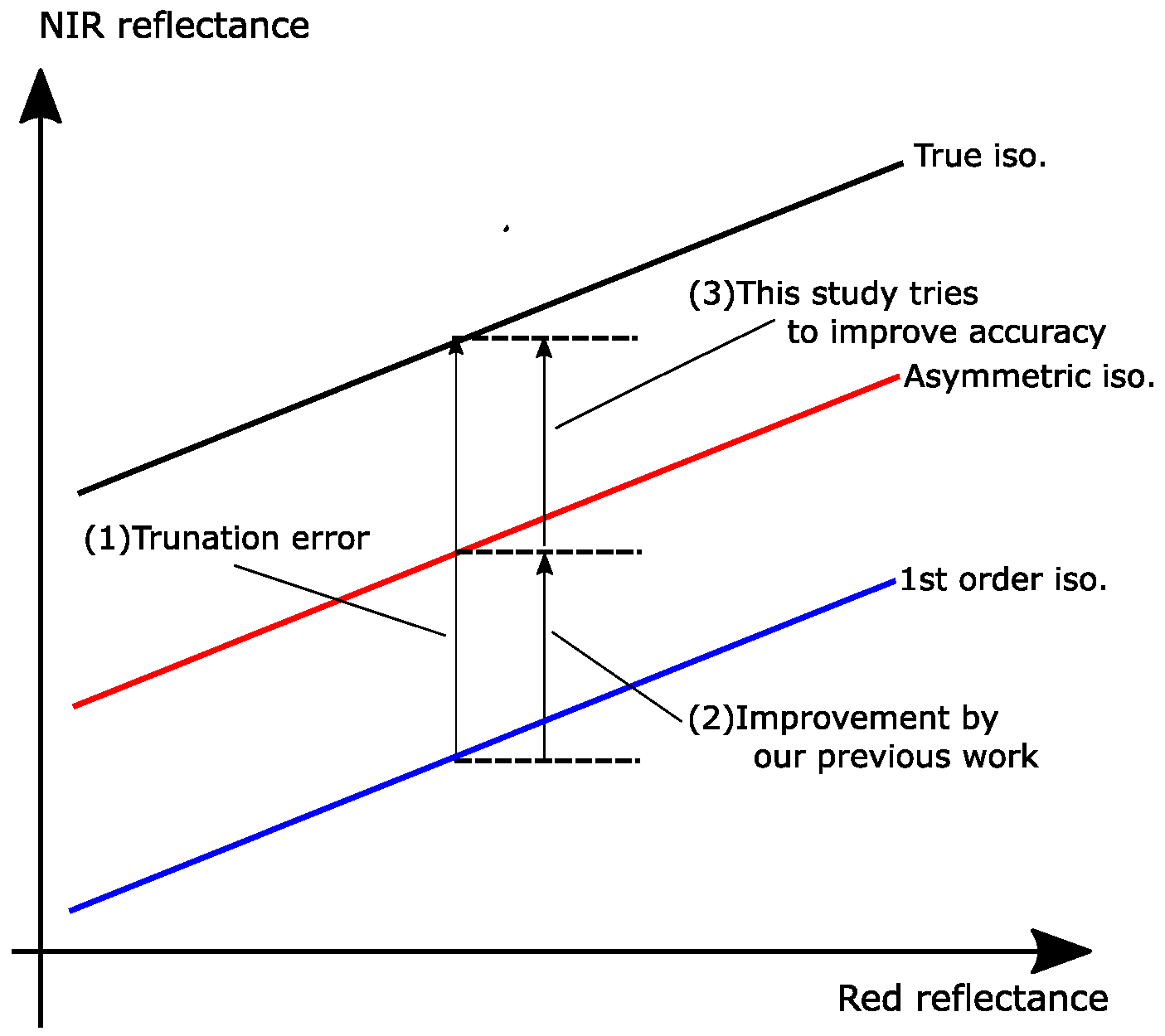
Figure 3.
Illustration of the truncation error in the vegetation isoline equations and its improvement by this and previous studies.
Figure 3.
Illustration of the truncation error in the vegetation isoline equations and its improvement by this and previous studies.
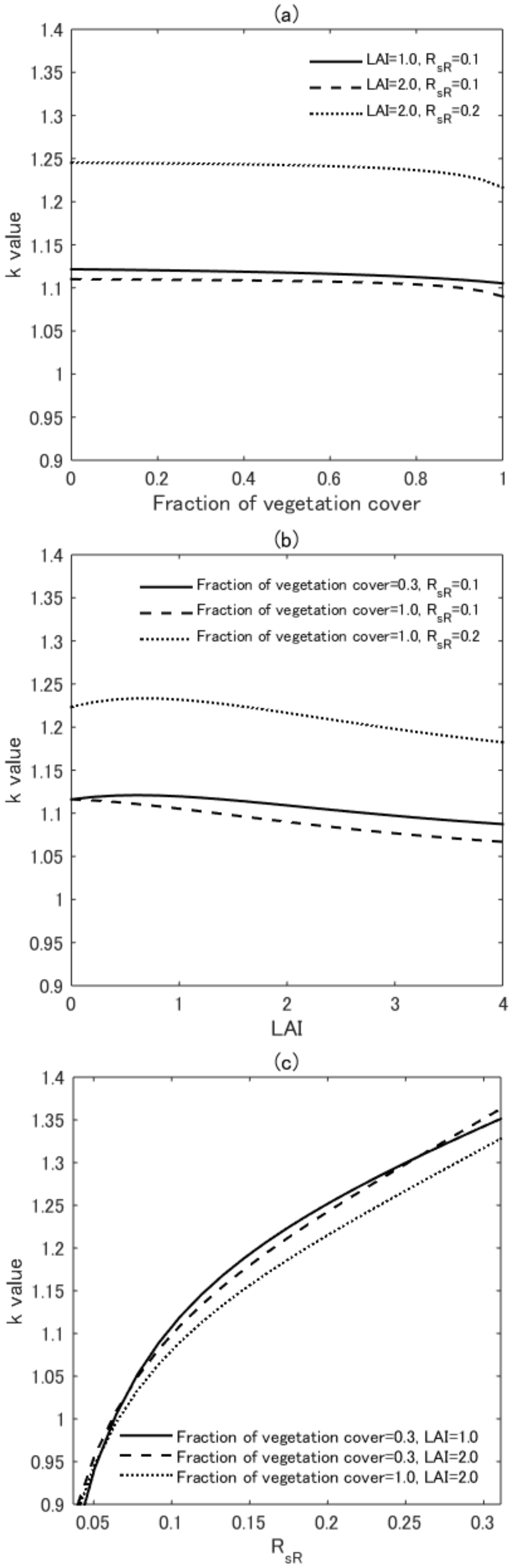
Figure 4.
(a) Plot of the k-values along with the FVC over three pairs of fixed LAI and (LAI = 1.0 and = 0.1, LAI = 2.0 and = 0.1, and LAI = 2.0 and = 0.2); (b) Plot of the k-values along with LAI over three pairs of fixed FVC and (FVC = 0.3 and = 0.1, FVC = 1.0 and = 0.1, and FVC = 1.0 and = 0.2); (c) Plot of the k-values along with over three pairs of fixed FVC and LAI (FVC = 0.3 and LAI = 1.0, FVC = 0.3 and LAI = 2.0, and FVC = 1.0 and LAI = 2.0).
Figure 4.
(a) Plot of the k-values along with the FVC over three pairs of fixed LAI and (LAI = 1.0 and = 0.1, LAI = 2.0 and = 0.1, and LAI = 2.0 and = 0.2); (b) Plot of the k-values along with LAI over three pairs of fixed FVC and (FVC = 0.3 and = 0.1, FVC = 1.0 and = 0.1, and FVC = 1.0 and = 0.2); (c) Plot of the k-values along with over three pairs of fixed FVC and LAI (FVC = 0.3 and LAI = 1.0, FVC = 0.3 and LAI = 2.0, and FVC = 1.0 and LAI = 2.0).
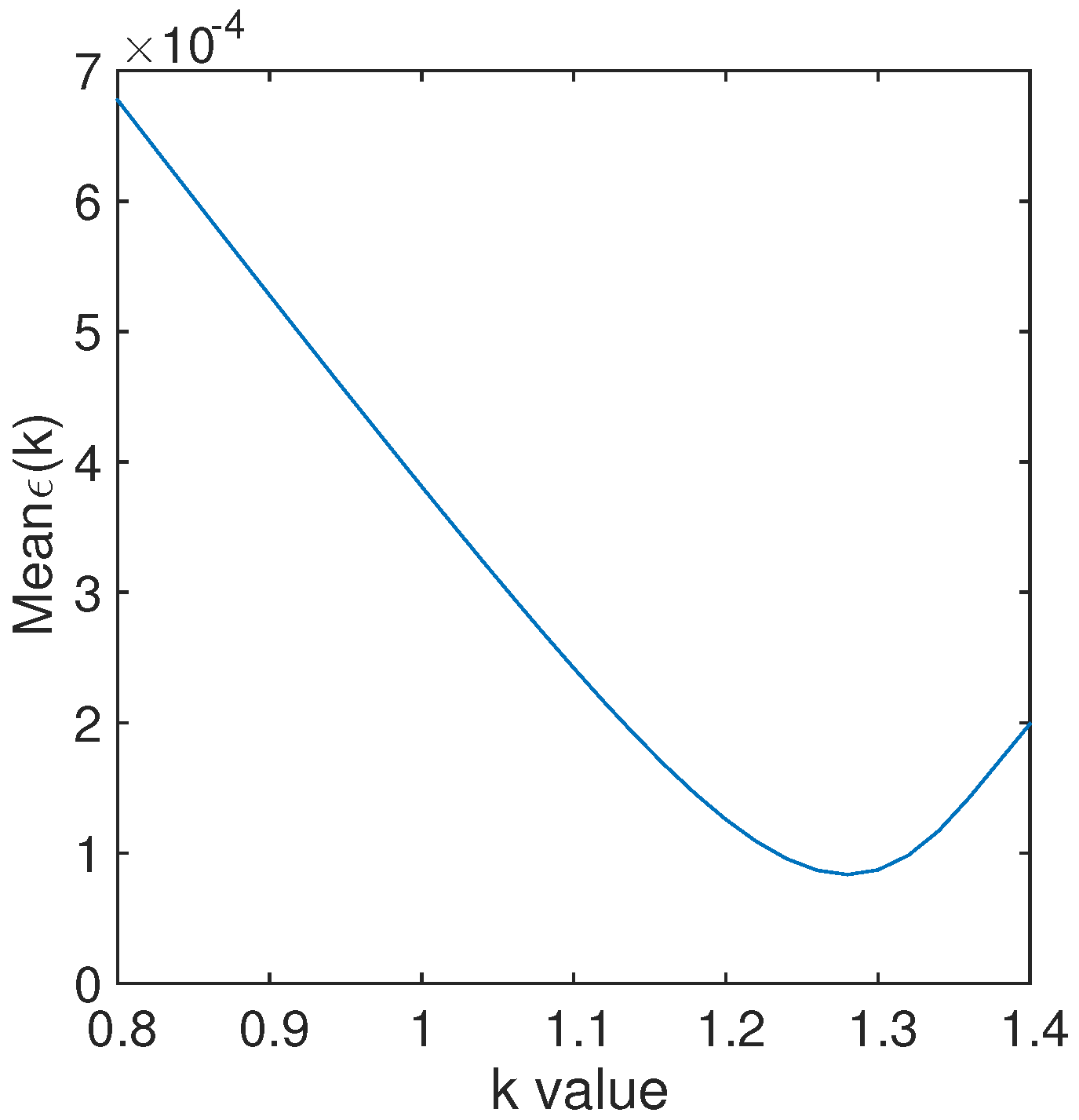
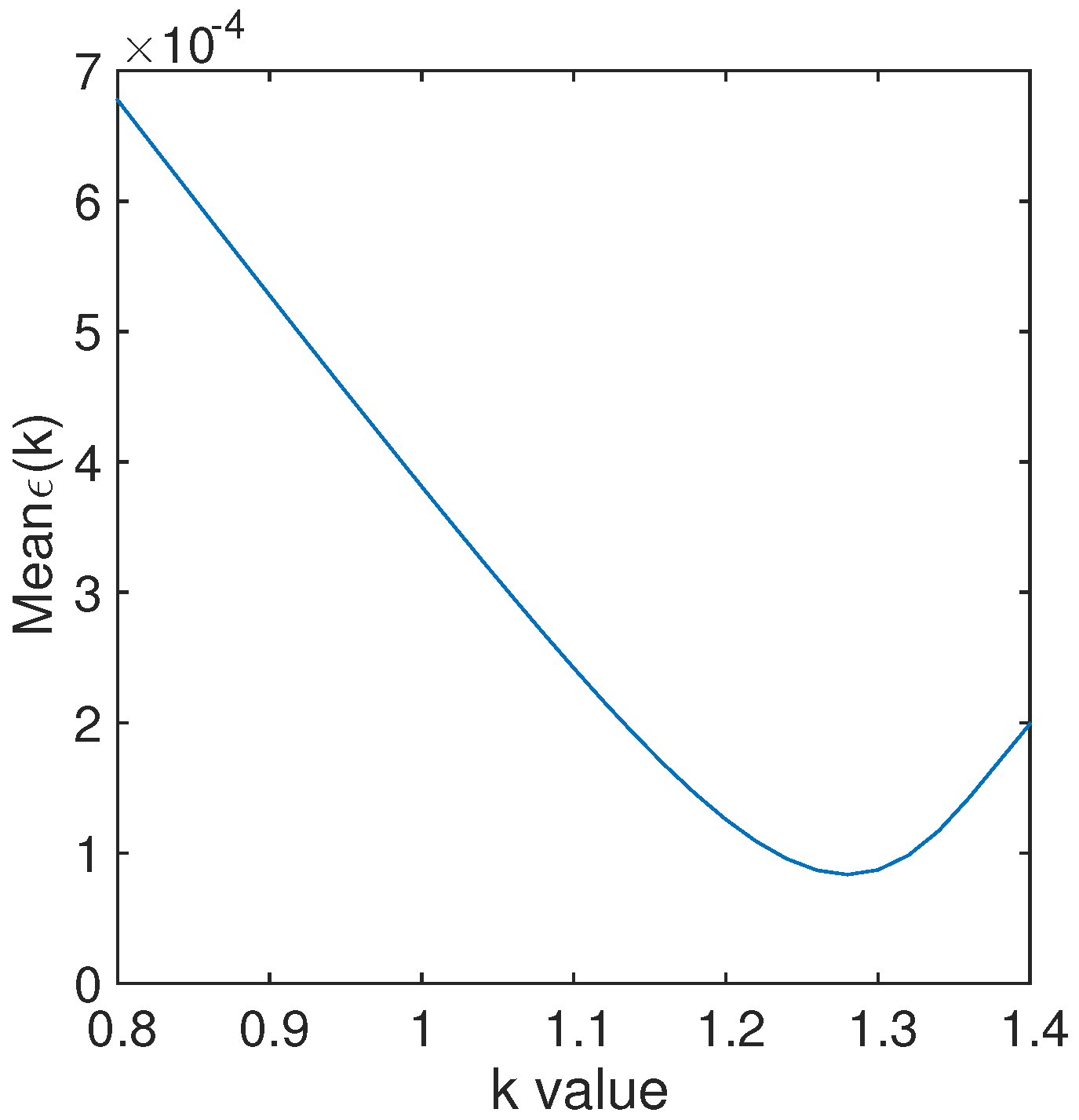
Figure 5.
Plot of the mean value of ϵ versus the k-value.
Figure 5.
Plot of the mean value of ϵ versus the k-value.
Figure 6.
(a) Contour plot of ϵ over LAI and space for k = 1.00; (b) Contour plot of ϵ for k = 1.25; (c) Contour plot of ϵ for k = 1.29; (d) Contour plot of ϵ for k = 1.30.
Figure 6.
(a) Contour plot of ϵ over LAI and space for k = 1.00; (b) Contour plot of ϵ for k = 1.25; (c) Contour plot of ϵ for k = 1.29; (d) Contour plot of ϵ for k = 1.30.
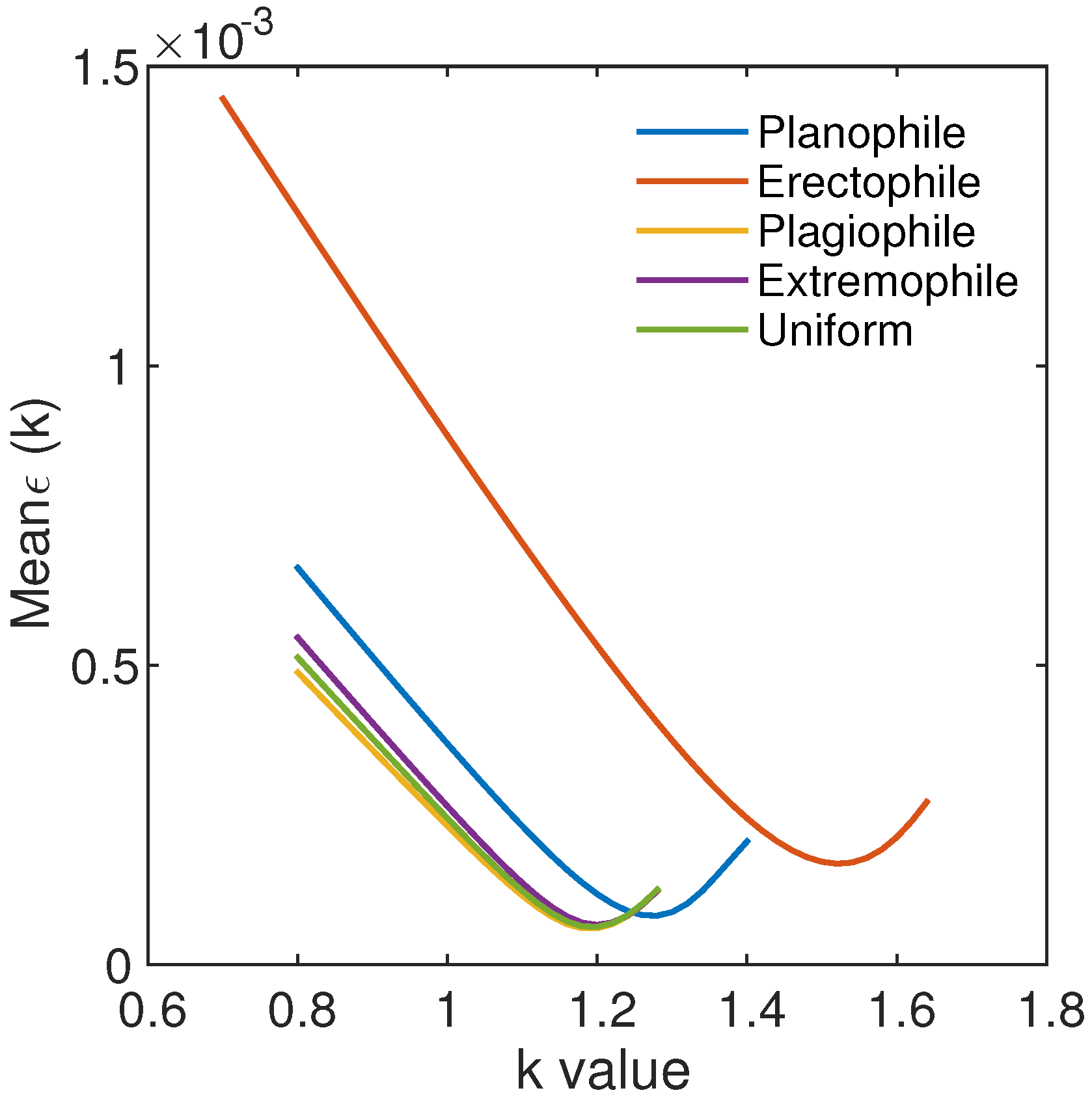
Figure 7.
Plot of the mean ϵ as a function of the k-value for the planophile, erectophile, plagiophile, extremophile, and uniform LADs, respectively.
Figure 7.
Plot of the mean ϵ as a function of the k-value for the planophile, erectophile, plagiophile, extremophile, and uniform LADs, respectively.
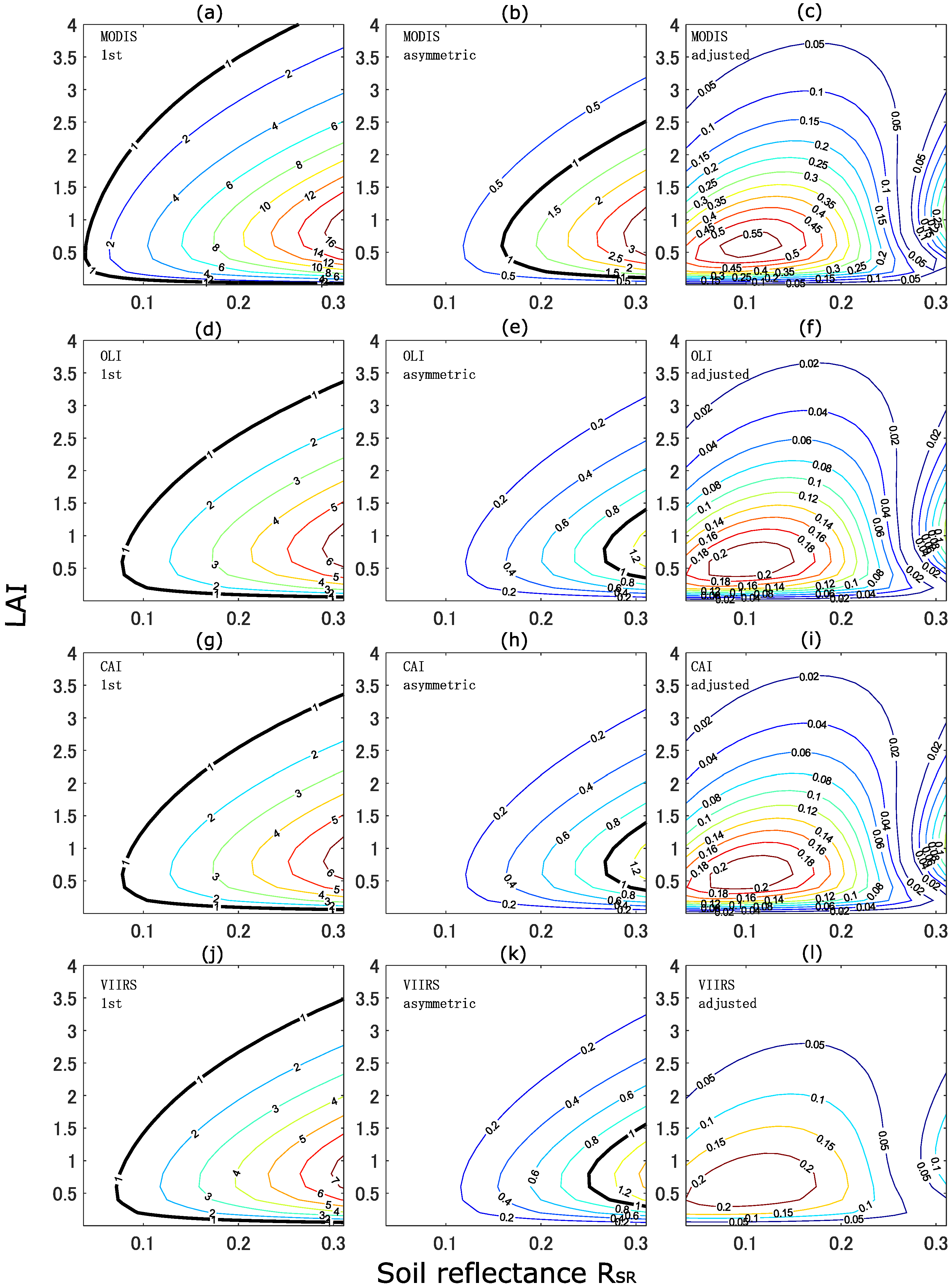
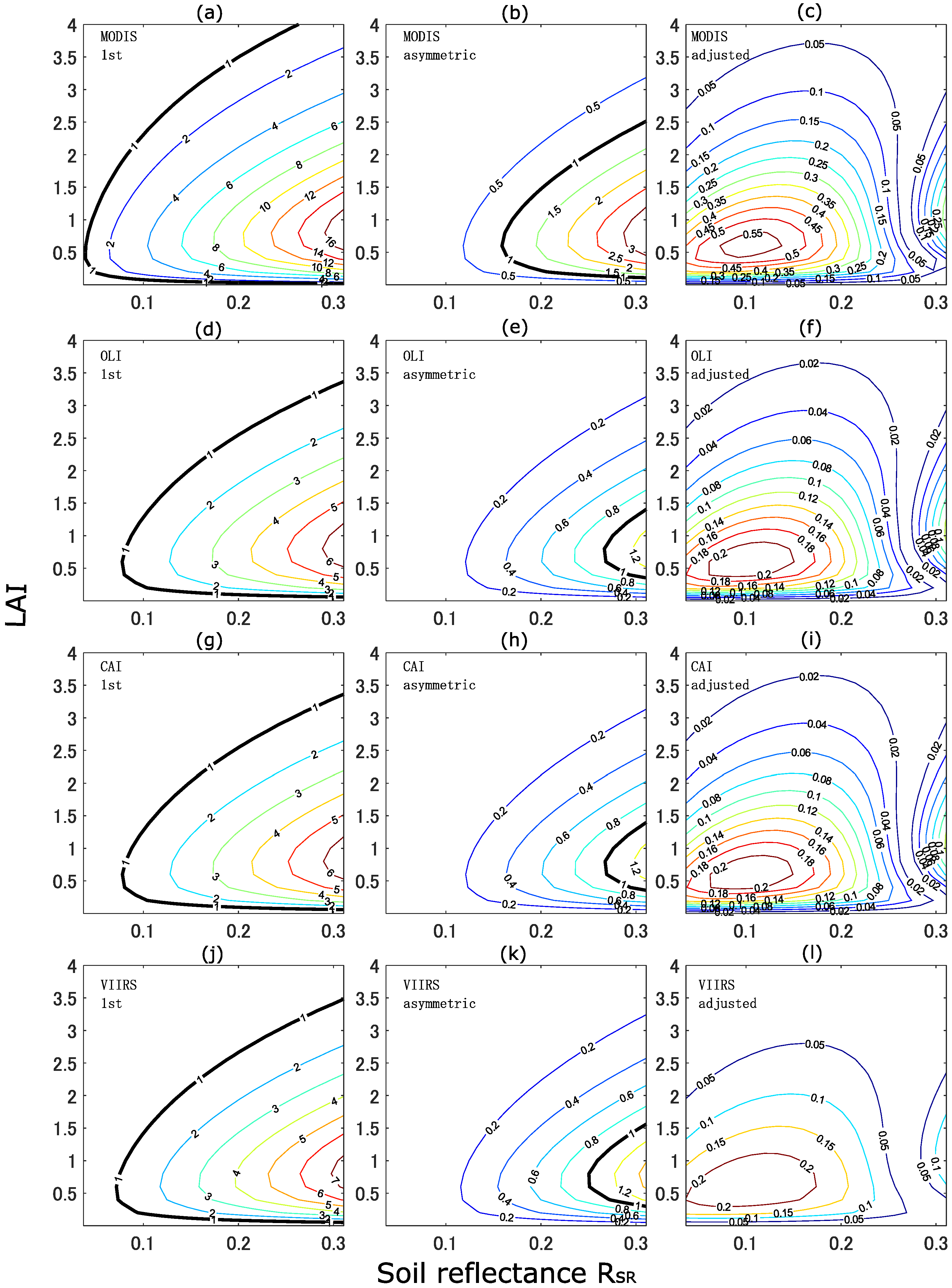
Figure 8.
Contour plots of r over LAI- space. From the top to the bottom, each plot correspond to the MODIS (a, b, c), OLI (d, e, f), CAI (g, h, i), and VIIRS (j, k, l) sensors, respectively. From the left to right column, each plot corresponds to the first-order (a, d, g, j), asymmetric-order (b, e, h, k), and adjusted asymmetric-order (c, f, i, l) (with = 1.29) isoline equations, respectively. The bold line indicates r = 1.0. (a) MODIS-first; (b) MODIS-asymmetric; (c) MODIS-adjusted; (d) OLI-first; (e) OLI-asymmetric; (f) OLI-adjusted; (g) CAI-first; (h) CAI-asymmetric; (i) CAI-adjusted; (j) VIIRS-first; (k) VIIRS-asymmetric; (l) VIIRS-adjusted.
Figure 8.
Contour plots of r over LAI- space. From the top to the bottom, each plot correspond to the MODIS (a, b, c), OLI (d, e, f), CAI (g, h, i), and VIIRS (j, k, l) sensors, respectively. From the left to right column, each plot corresponds to the first-order (a, d, g, j), asymmetric-order (b, e, h, k), and adjusted asymmetric-order (c, f, i, l) (with = 1.29) isoline equations, respectively. The bold line indicates r = 1.0. (a) MODIS-first; (b) MODIS-asymmetric; (c) MODIS-adjusted; (d) OLI-first; (e) OLI-asymmetric; (f) OLI-adjusted; (g) CAI-first; (h) CAI-asymmetric; (i) CAI-adjusted; (j) VIIRS-first; (k) VIIRS-asymmetric; (l) VIIRS-adjusted.
Table 1.
Input parameters used in the numerical simulations.
Table 1.
Input parameters used in the numerical simulations.
| Geometry |
|---|
| Solar zenith angle | |
| Observation zenith angle | |
| Relative azimuth angle | |
| Pixel Heterogeneous Property |
| Fraction of vegetation cover (FVC) | 0.0–1.0 |
| Canopy Properties |
| Leaf area index (LAI) | 0.0–4.0 |
| Hotspot size parameter | 0.01 |
| Leaf Structural and Chemical Properties |
| Leaf angle distribution (LAD) | Spherical, Planophile, Erectophile |
| | Plagiophile, Extremophile, Uniform |
| Leaf mesophyll structure | 1.5 |
| Chlorophyll-a and -b | 40 |
| Carotenoid content | 8 |
| Leaf mass per area | 0.009 |
| Equivalent water thickness | 0.01 cm |
| Brown pigment content | 0 |
| Soil Properties |
| Wet soil reflectances at 655 and 865 nm | 0.037 and 0.071 |
| Dry soil reflectances at 655 and 865 nm | 0.311 and 0.412 |
| Soil factor (mixture ratio of wet and dry soils) | 0.0–1.0 [0.0: wet soil; 1.0: dry soil] |
Table 2.
Statistics of for k = 1.25, 1.26, 1.27, 1.28, 1.29, and 1.30. STD: standard deviation.
Table 2.
Statistics of for k = 1.25, 1.26, 1.27, 1.28, 1.29, and 1.30. STD: standard deviation.
| | LAD: Spherical |
|---|
| | 1.25 | 1.26 | 1.27 | 1.28 | 1.29 | 1.30 |
| Mean | | | | | | |
| STD | | | | | | |
| MAX | | | | | | |
Table 3.
Statistics of the errors in first-order, asymmetric-order, and adjusted asymmetric-order ( = 1.29) isoline equations.
Table 3.
Statistics of the errors in first-order, asymmetric-order, and adjusted asymmetric-order ( = 1.29) isoline equations.
| | LAD: Spherical |
|---|
| | First-Order | Asymmetric | Adjusted Asymmetric | adj./first | adj./asym. |
| Mean | | | | 4.0% | 22.1% |
| STD | | | | 2.9% | 13.9% |
| MAX | | | | 3.2% | 16.1% |
Table 4.
Statistical distributions of the errors in the first-order, asymmetric-order, and adjusted aymmetric-order ( = 1.29) isoline equations for the five LADs, including planophile, erectophile, plagiophile, extremophile, and uniform distributions.
Table 4.
Statistical distributions of the errors in the first-order, asymmetric-order, and adjusted aymmetric-order ( = 1.29) isoline equations for the five LADs, including planophile, erectophile, plagiophile, extremophile, and uniform distributions.
| | LAD: Planophile |
|---|
| | first-order isoline | asymmetric isoline | adjusted isoline | adj./1st | adj./asym. |
| Mean | | | | 4.1% | 22.7% |
| STD | | | | 2.8% | 13.8% |
| MAX | | | | 2.8% | 14.6% |
| | LAD: Erectophile |
| | first-order isoline | asymmetric isoline | adjusted isoline | adj./1st | adj./asym. |
| Mean | | | | 12.6% | 44.1% |
| STD | | | | 15.6% | 49.4% |
| MAX | | | | 15.8% | 50.9% |
| | LAD: Plagiophile |
| | first-order isoline | asymmetric isoline | adjusted isoline | adj./1st | adj./asym. |
| Mean | | | | 7.9% | 58.4% |
| STD | | | | 6.2% | 39.4% |
| MAX | | | | 6.9% | 48.0% |
| | LAD: Extremophile |
| | first-order isoline | asymmetric isoline | adjusted isoline | adj./1st | adj./asym. |
| Mean | | | | 7.2% | 51.9% |
| STD | | | | 5.5% | 33.6% |
| MAX | | | | 5.7% | 38.3% |
| | LAD: Uniform |
| | first-order isoline | asymmetric isoline | adjusted isoline | adj./1st | adj./asym. |
| Mean | | | | 7.7% | 56.6% |
| STD | | | | 5.9% | 37.3% |
| MAX | | | | 6.5% | 44.4% |
Table 5.
Optimum k-value and statistical distributions of the errors in the adjusted asymmetric isoline equations, with the optimal k-values for each of the five LADs, including the planophile, erectophile, plagiophile, extremophile, and uniform distributions.
Table 5.
Optimum k-value and statistical distributions of the errors in the adjusted asymmetric isoline equations, with the optimal k-values for each of the five LADs, including the planophile, erectophile, plagiophile, extremophile, and uniform distributions.
| LAD | Optimum k | Mean | STD | MAX |
|---|
| Planophile | 1.28 | | | |
| Erectophile | 1.53 | | | |
| Plagiophile | 1.19 | | | |
| Extremophile | 1.2 | | | |
| Uniform | 1.20 | | | |
Table 6.
SNR in the red and NIR bands for the Aqua-Moderate Resolution Imaging Spectroradiometer (Aqua-MODIS) [
38], Landsat 8-Operational Land Imager (Landsat 8 OLI) [
39], Greenhouse Gases Observing Satellite (GOSAT)-Cloud and Aerosol Imager (CAI) [
40], and Suomi National Polar-orbiting Partnership (NPP)-Visible Infrared Imaging Radiometer Suite (VIIRS) [
41]. SNR for MODIS band1 (red) was derived by calculating 128 (sensor design requirement) × 1.57 (ratio of measured SNR in-orbit to sensor design requirement) and SNR for MODIS band 2 (NIR) was derived by 201 × 2.64 [
38]. Similaly, SNR for VIIRS I1 and I2 bands (red and NIR) were derived by caluculating 119 × 1.76 and 150 × 1.5, respectively [
41].
Table 6.
SNR in the red and NIR bands for the Aqua-Moderate Resolution Imaging Spectroradiometer (Aqua-MODIS) [38], Landsat 8-Operational Land Imager (Landsat 8 OLI) [39], Greenhouse Gases Observing Satellite (GOSAT)-Cloud and Aerosol Imager (CAI) [40], and Suomi National Polar-orbiting Partnership (NPP)-Visible Infrared Imaging Radiometer Suite (VIIRS) [41]. SNR for MODIS band1 (red) was derived by calculating 128 (sensor design requirement) × 1.57 (ratio of measured SNR in-orbit to sensor design requirement) and SNR for MODIS band 2 (NIR) was derived by 201 × 2.64 [38]. Similaly, SNR for VIIRS I1 and I2 bands (red and NIR) were derived by caluculating 119 × 1.76 and 150 × 1.5, respectively [41].
| | MODIS | Landsat8 OLI | GOSAT-CAI | VIIRS |
|---|
| Red band | 201 | 227 | 200 | 209 |
| NIR band | 530 | 201 | 200 | 225 |








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}