
A Weighted Spatial-Spectral Kernel RX Algorithm and Efficient Implementation on GPUs


Abstract
:1. Introduction
2. Methods
2.1. Anomaly Detection Methods
2.1.1. RX Detector
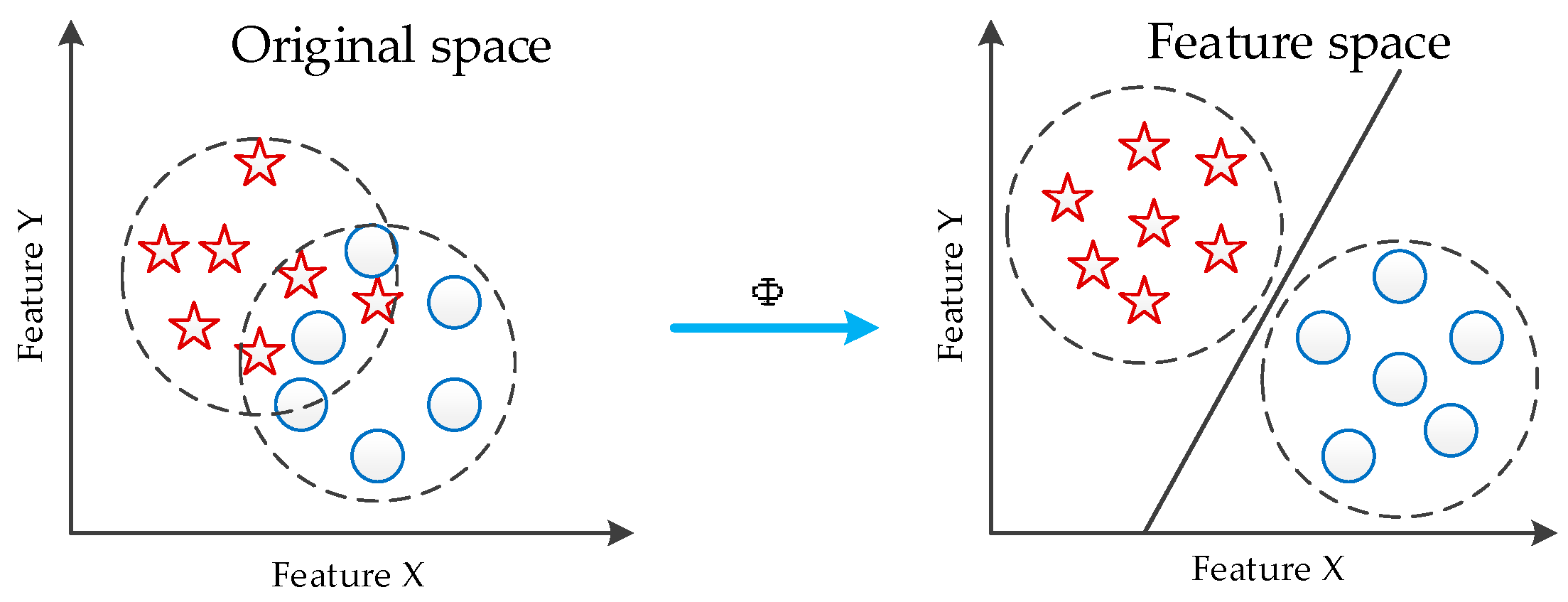
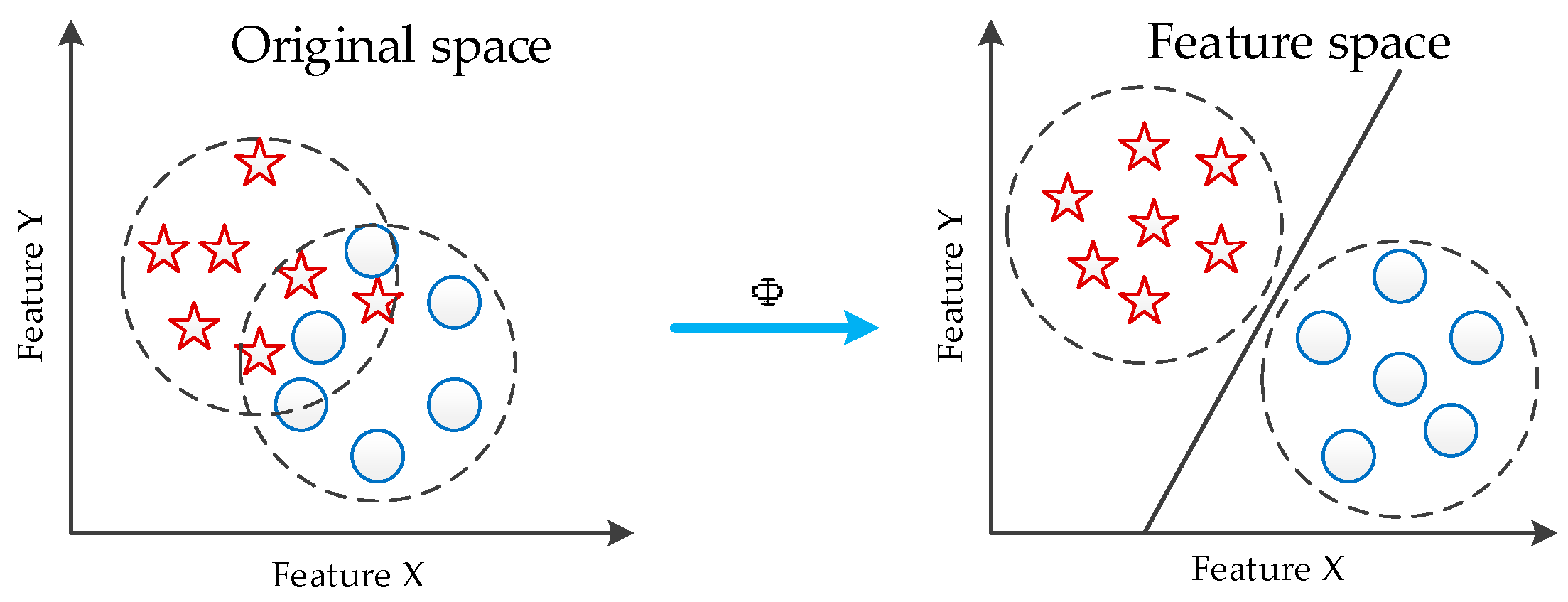
2.1.2. Kernel RX Detector
2.2. WSSKRX Algorithm and Parallel Implementation on GPUs
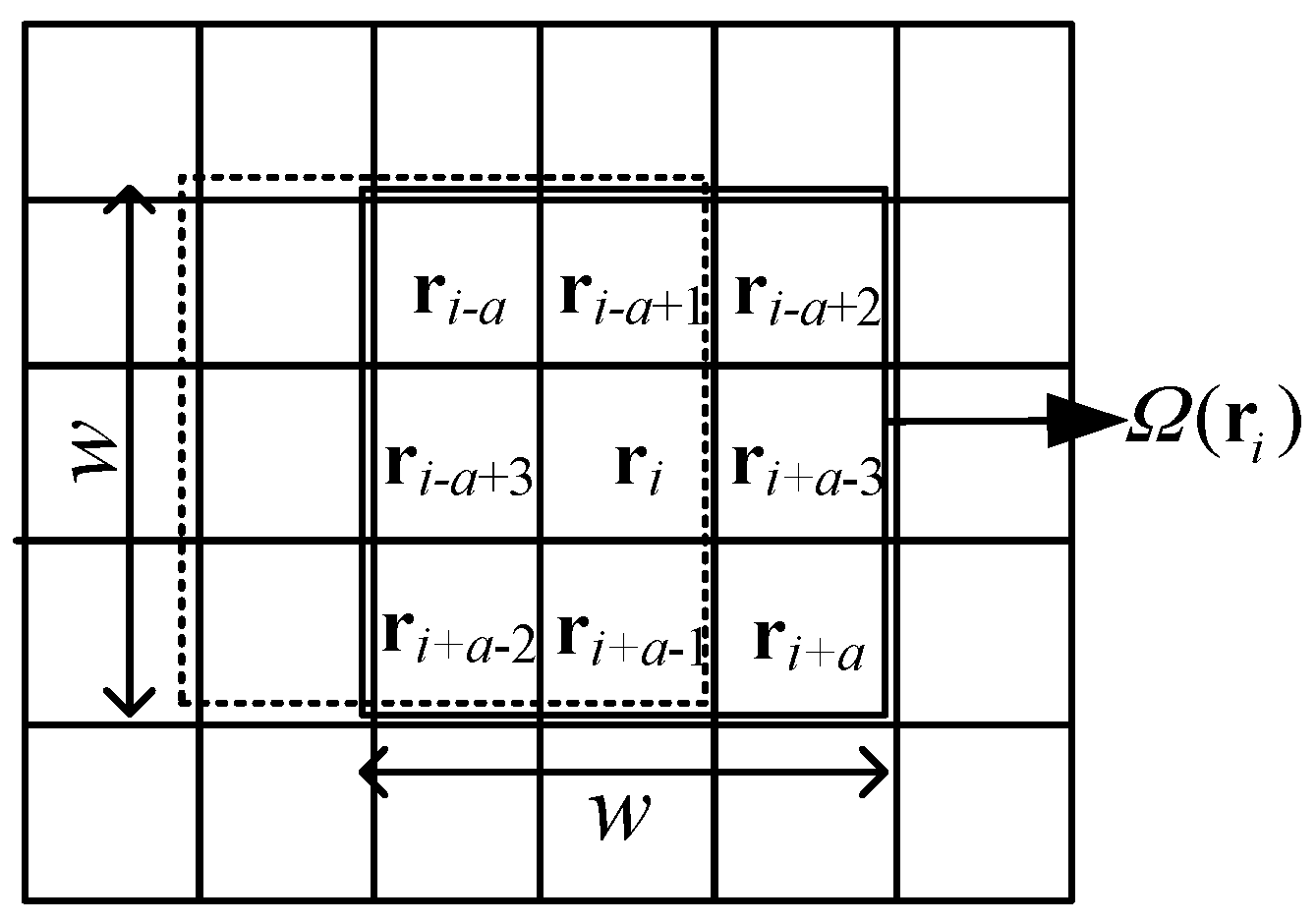
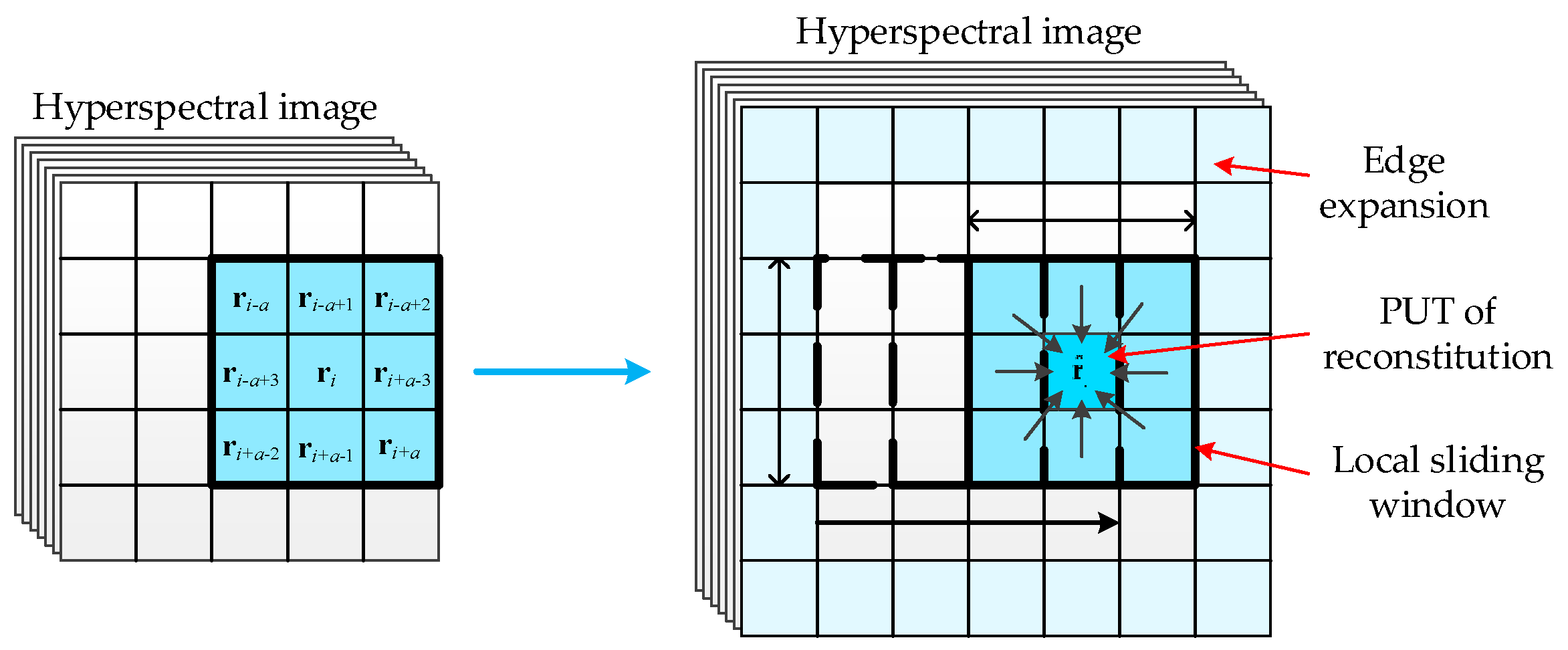
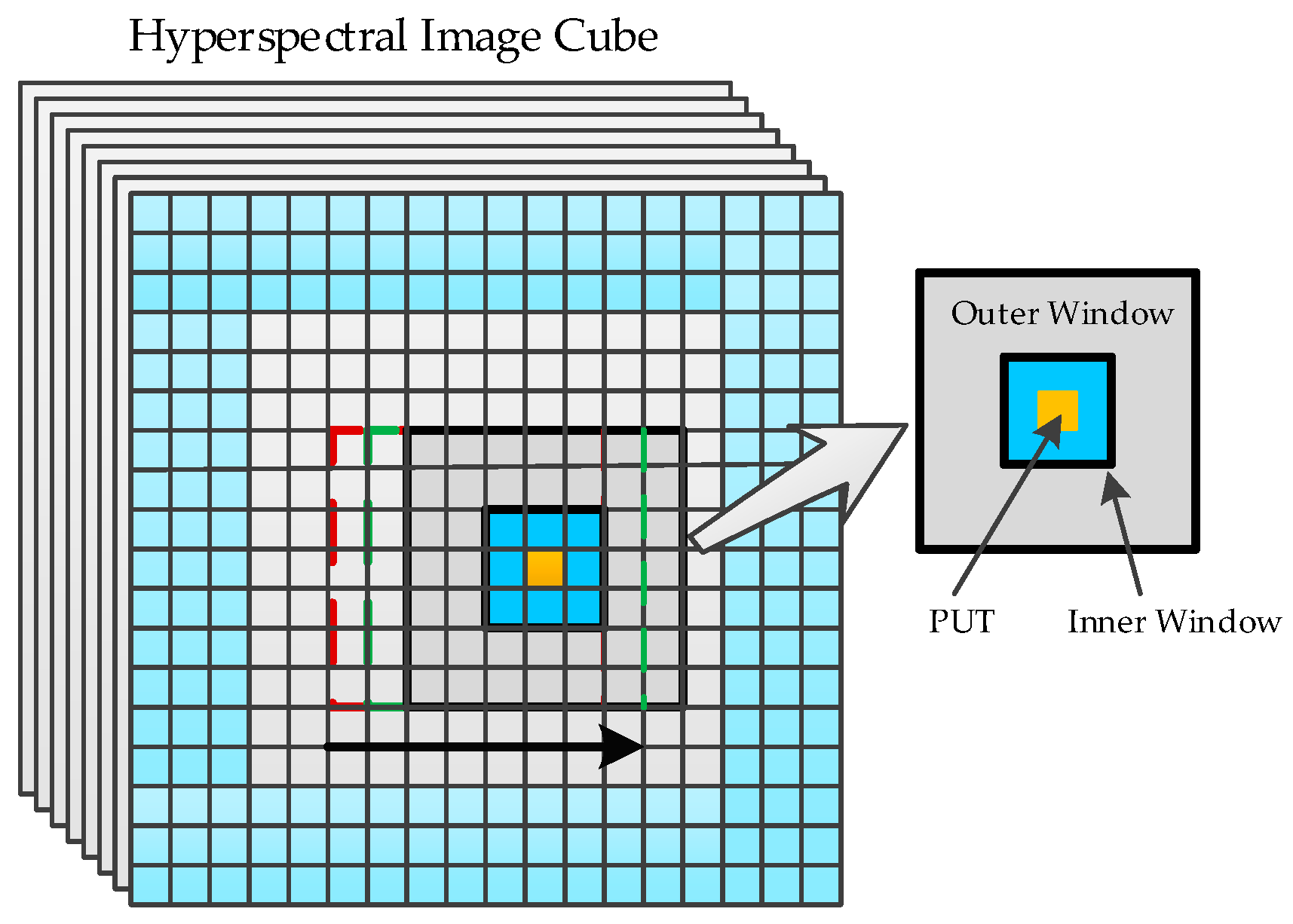
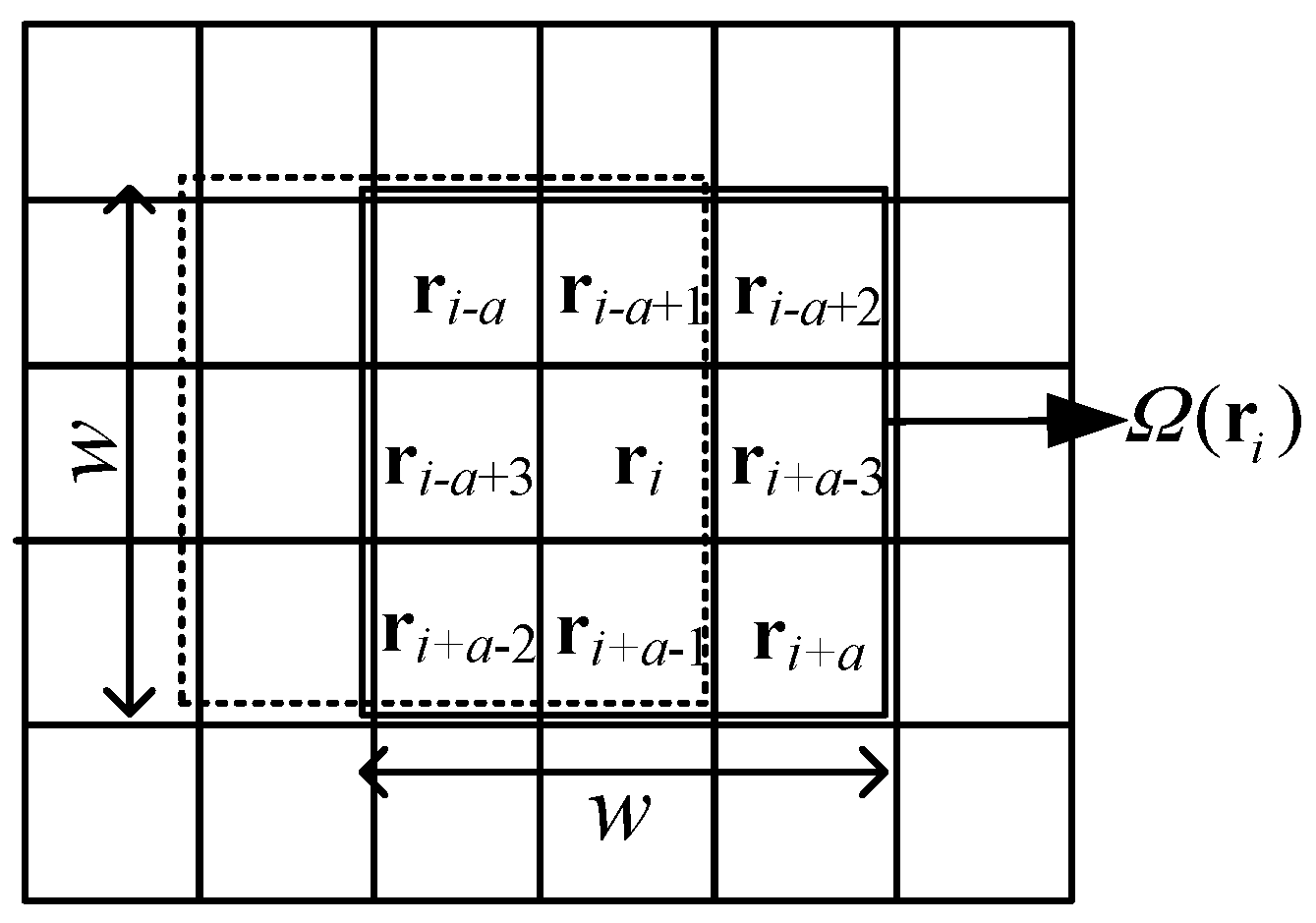
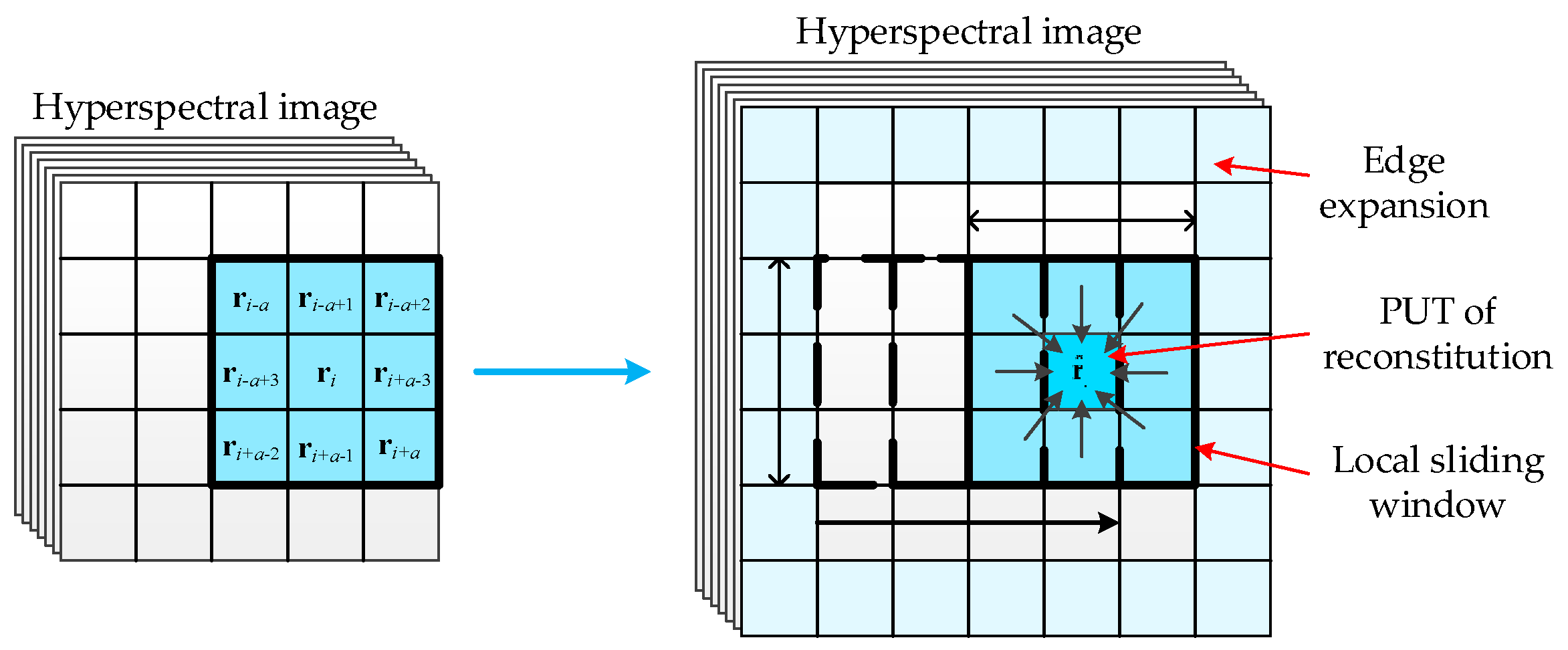
2.2.1. The Local Information Reconstruction
2.2.2. Weighted Spatial-Spectral Kernel RX Method
2.2.3. Parallel Implementation of the WSSKRX Algorithm on GPUs
| Algorithm 1. CUDA Pseudo-Code of WSSKRX |
| 1: INPUTS: D, N, L ,, , , and |
| //D denotes a hyperspectral image with N pixel, L denotes the number of spectral bands, and denote the size of outer and inner window, respectively, denotes spectral factor, denotes the width of the RBF kernel, and denotes weighting factor. |
| 2: cudaMemcpy (); |
| //copy the initial hyperspectral data from host to device (data communication) |
| 3: the edge expansion of D; |
| //the size of expansion is determined by the |
| 4: ; |
| // denotes data sample vector |
| 5: For (N) |
| 6: Calculate in ; |
| // denotes reconstructed information of sample vector |
| 7: cudaThreadSynchronize (); |
| //the function of thread synchronization |
| 8: Calculate and ; |
| // and denoted the kernel operations in the feature space |
| 9: cudaThreadSynchronize (); |
| //the function of thread synchronization |
| 10: Calucalate ; |
| // denoted Gram matrix, |
| 11: ; |
| 12: ; |
| 13: cudaMemcpy(); |
| //copy the hyperspectral data from device to host (data communication) |
| 14: End for |
| 15: OUTPUT: result |
- (1)
- In order to facilitate the detection of edge information, the original data need to be expanded. Thus, the first CUDA kernel (step 3) is designed to copy the original edge information to new extended boundaries. Row = blockIdx.x * blockDim.x + threadIdx.x and Col = blockIDx.y * blockDim.y + threaddx.y have been used to achieve the index of thread and useful threads have been systematically scheduled. Thereby realizing the parallel process of information expansion.
- (2)
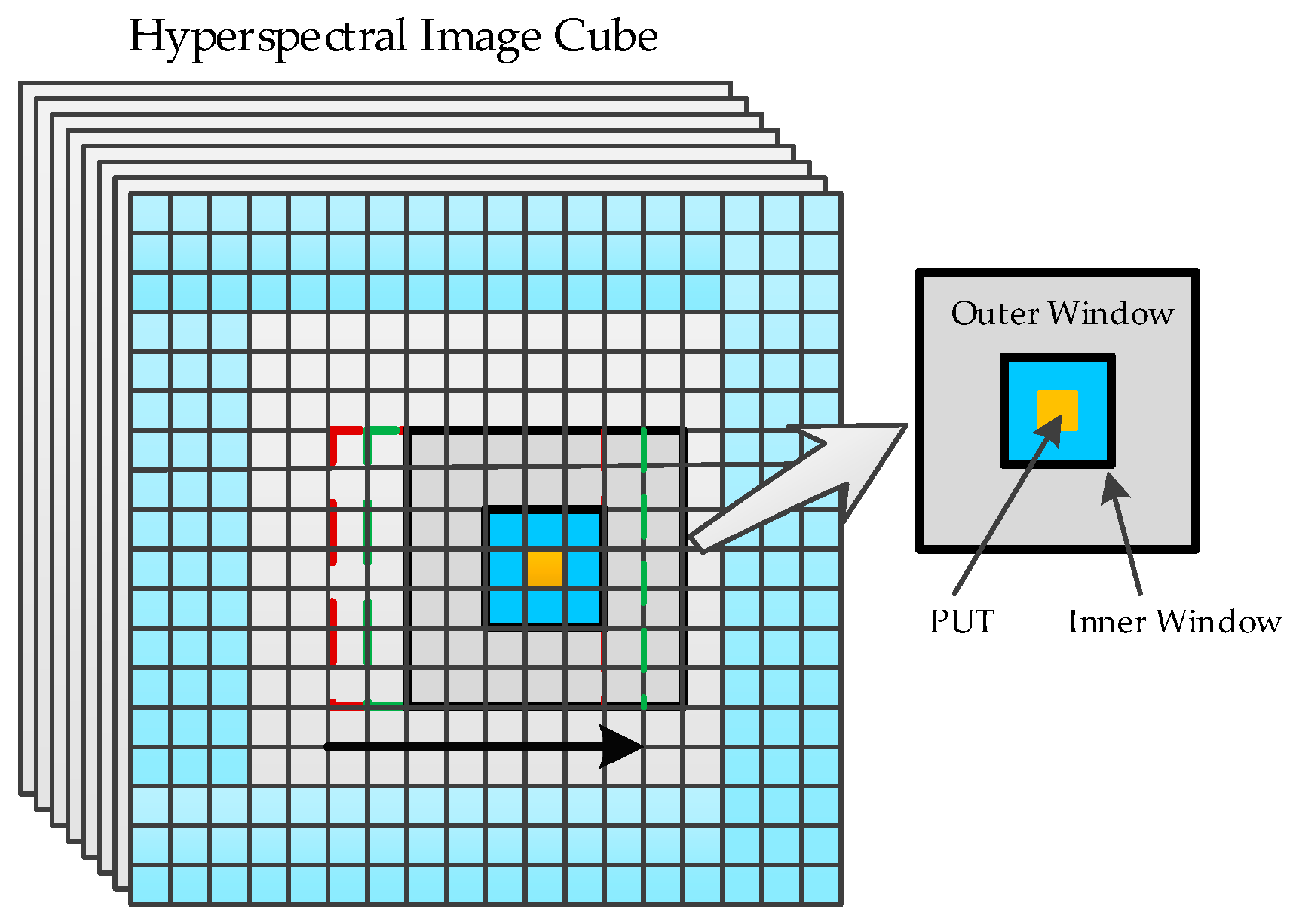
- The second CUDA kernel (step 6) fetches the PUTs from dual concentric windows and achieves the process of information reconstruction. The kernel launches as many blocks as the number of pixels for the original data presented in step 2, where each thread in one block computes an element of and then stores their reconstructed information into the global memory.
- (3)
- The kernel function takes a certain amount of computation in the algorithm and then the third kind of CUDA kernel is designed for each kernel operation in global memory. All the computational tasks are allocated to multiple threads for independent parallel implementation (steps 8–11). The CUDA kernel uses the sub-block of matrix and multi-warps independent operation to reduce memory latency and processing time. Since the calculation of the centralized Gram matrix is related to , a barrier should be created before calculation of to ensure correctness of the calculation. Through a series of parallel optimization design, the computational complexity of kernel function and matrix inversion are effectively reduced.
- (4)
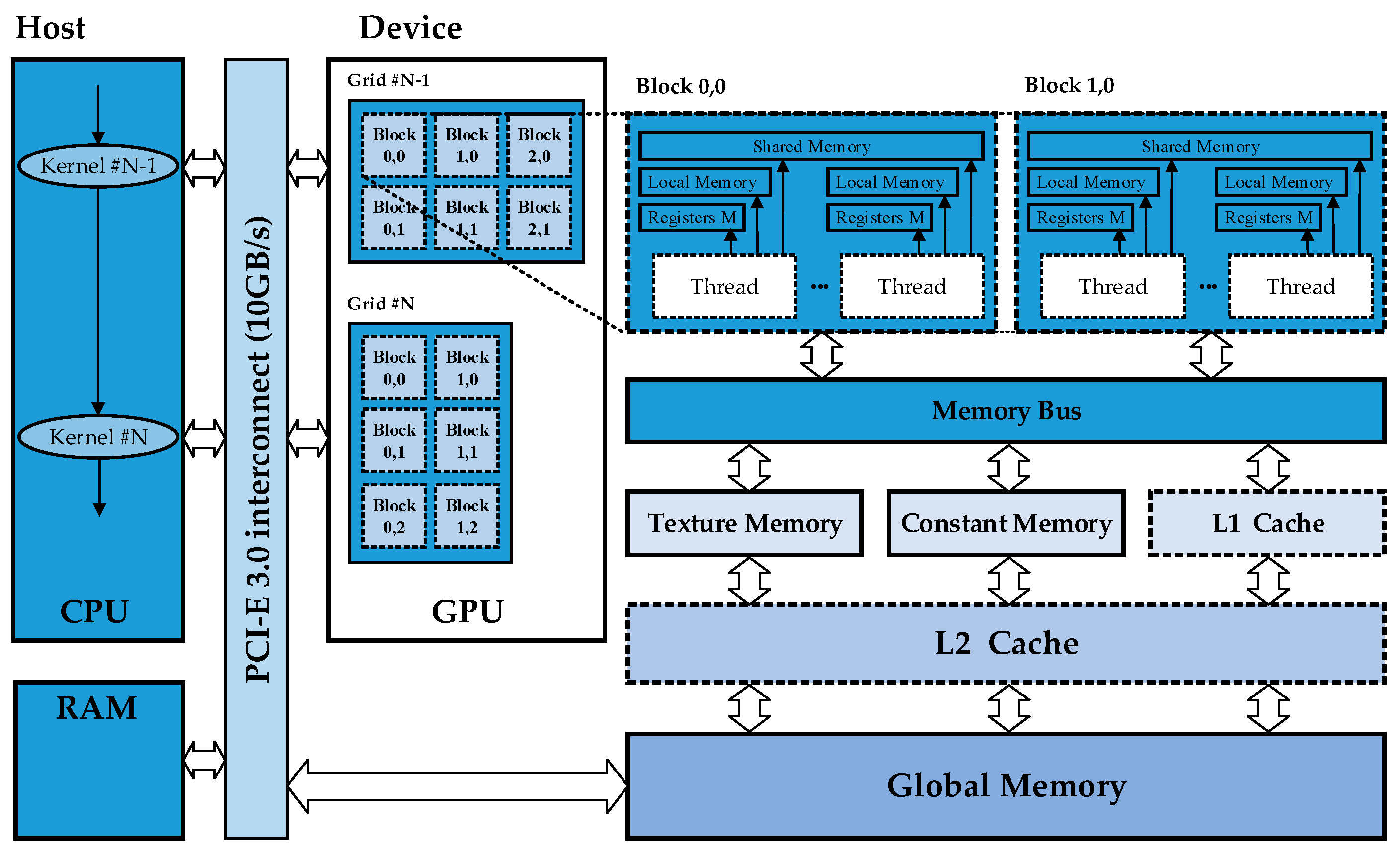
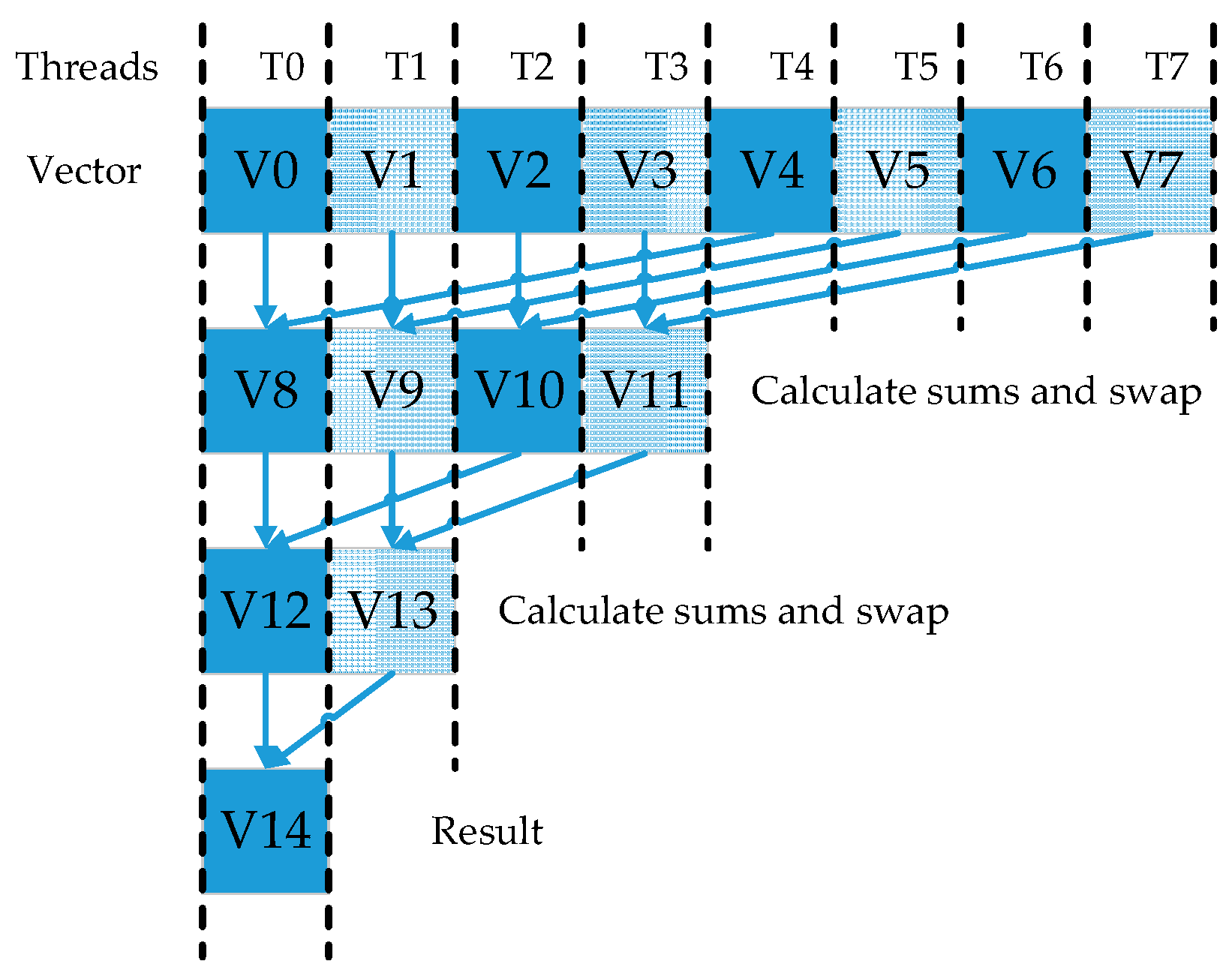
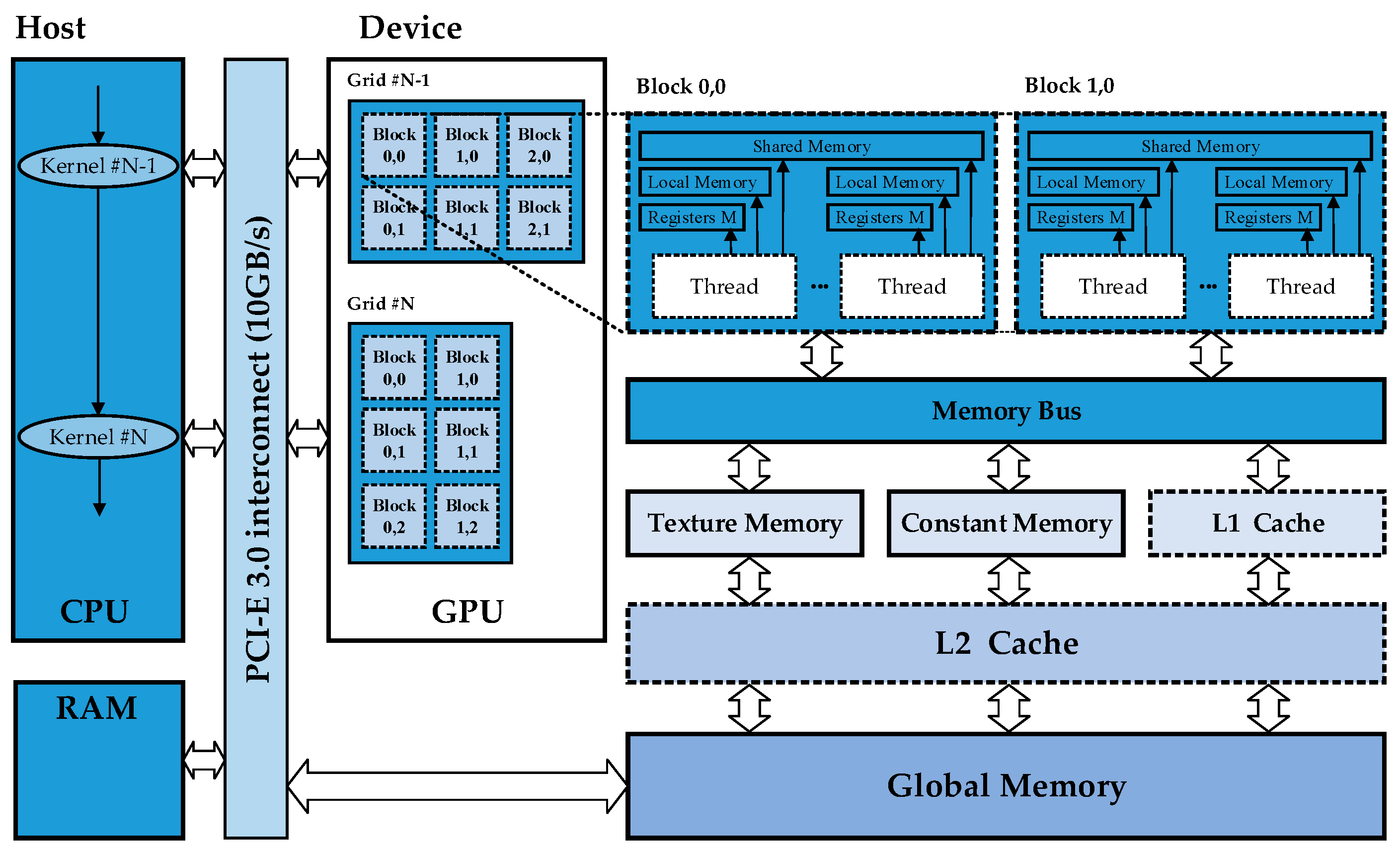
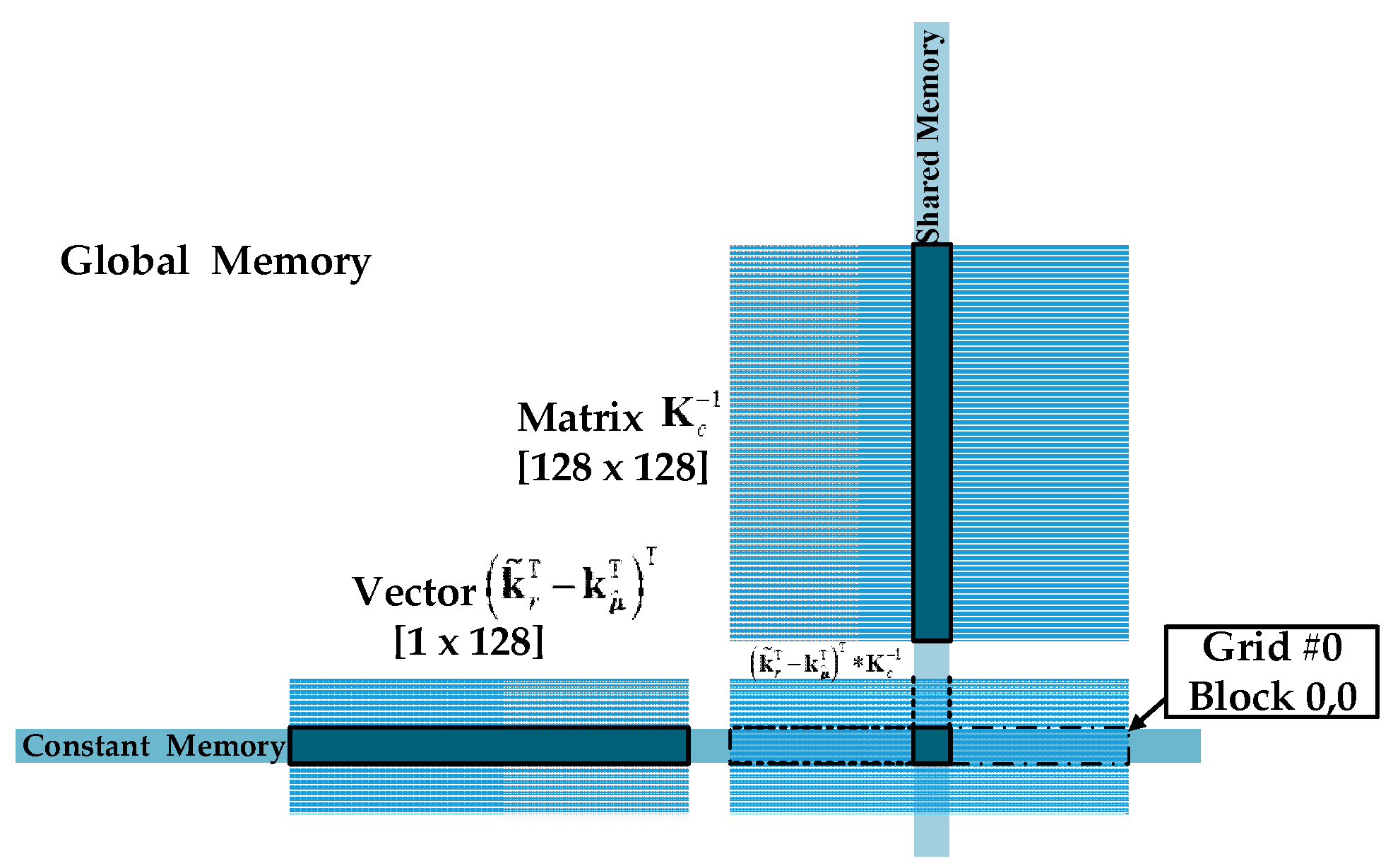
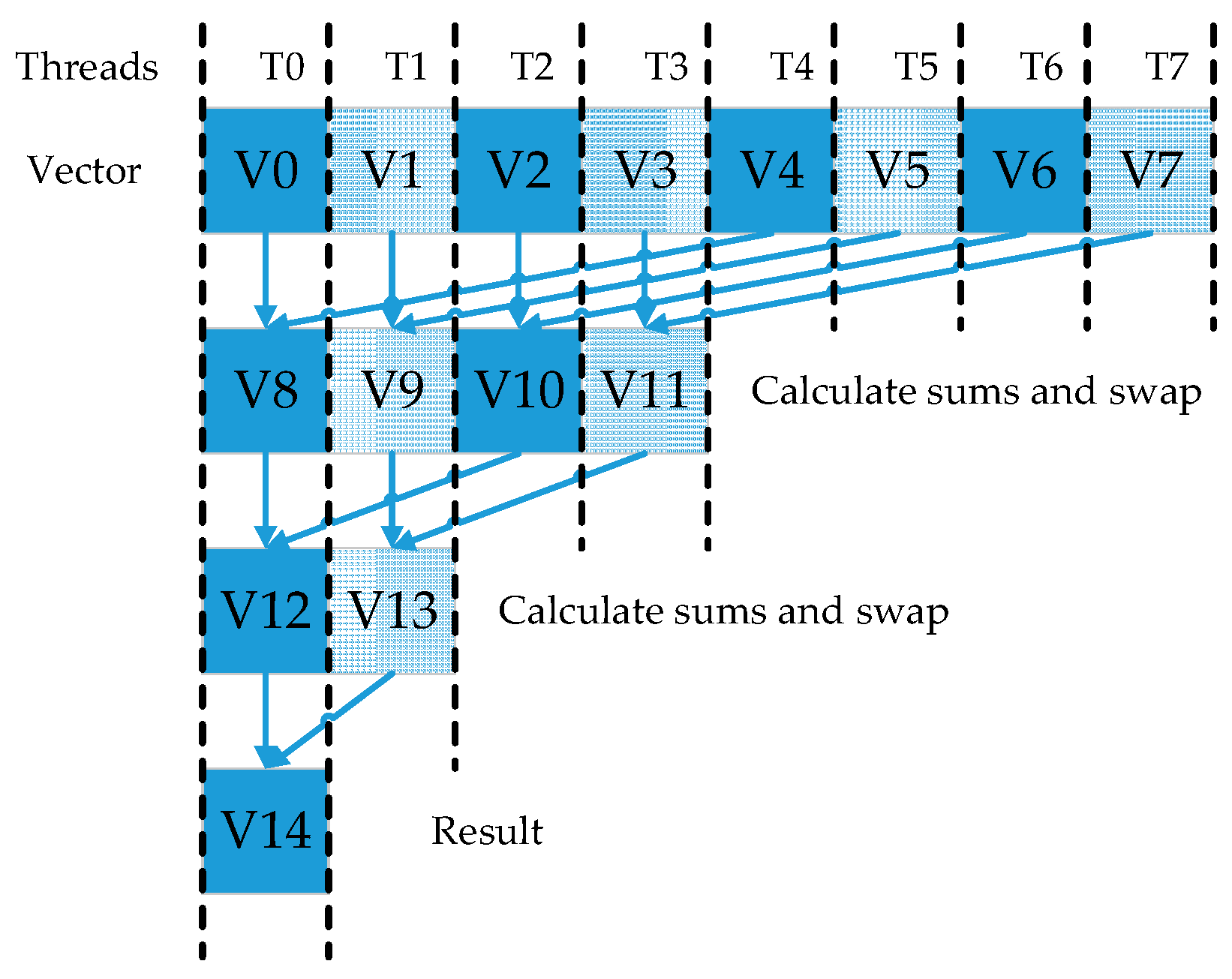
- And the last CUDA kernel (step 12) computes the results and completes target detection. To minimize the number of the global memory accesses and reduce access time, the result vector of and matrix are partitioned into sub-blocks and transferred to the shared memory. Each block uses a total of 48 KB of shared memory. Figure 6 illustrates this procedure, where each thread is responsible for computing each element of . For every matrix multiplication, each thread in one warp is responsible for one calculation, in which a row of the matrix is multiplied by a column. For two vector multiplication, every corresponding element of them are multiplied and added in turn. It takes plenty of time and threads. One common approach to solve this problem is parallel reduction. It works by using half number of threads of the elements in the dataset. Every thread calculates the sum of products. The resultant element is forwarded to the next round. In addition, the number of threads is then reduced by half and the process repeats until there is just a single element remaining (in Figure 7). A better approach is to drop whole warps by selecting the element from the other half of the dataset.
3. Description of Hyperspectral Datasets
3.1. Synthetic Dataset
3.2. SanDiego Airport Dataset
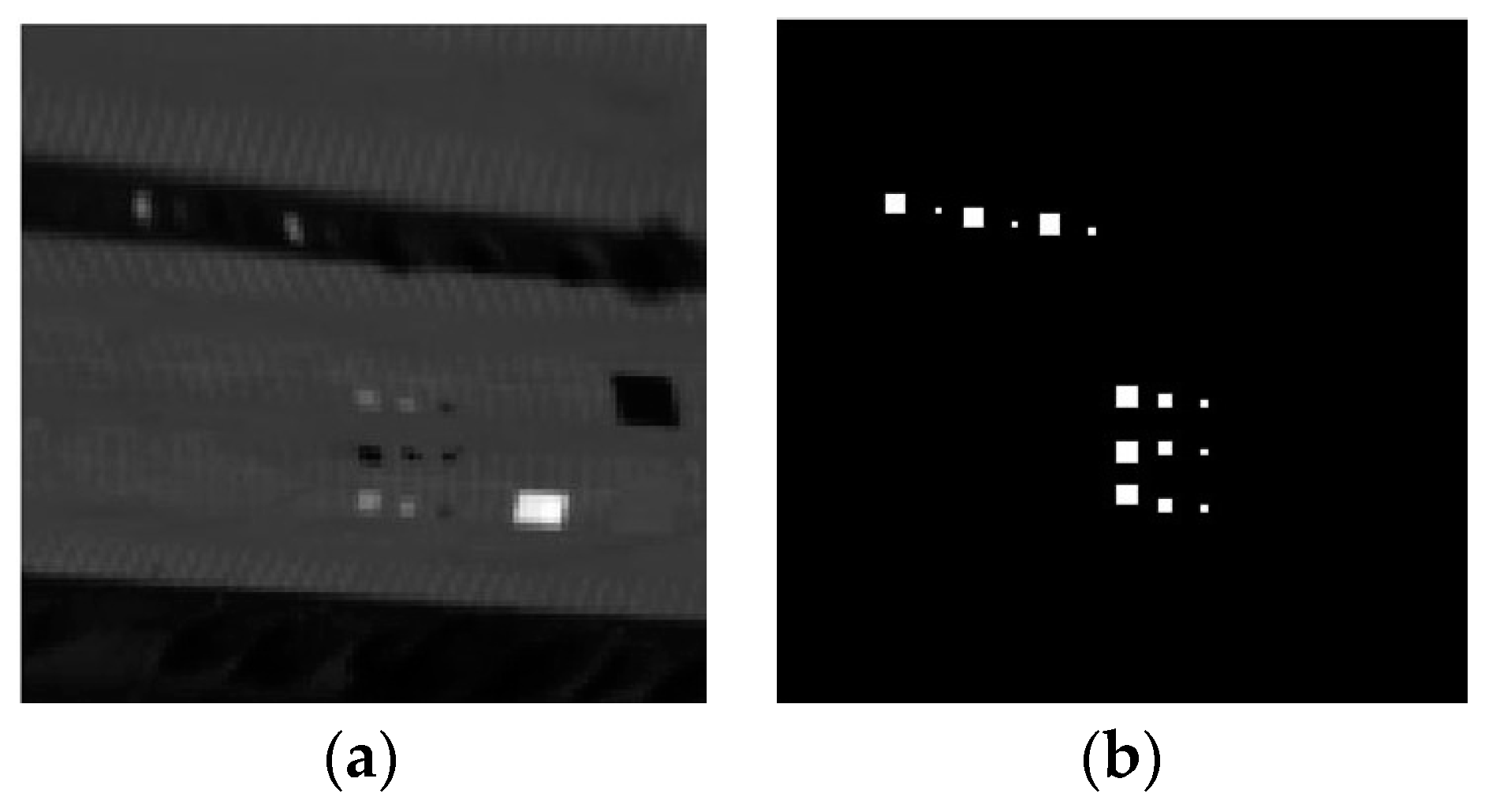
3.3. SpecTIR Dataset
4. Experimental Results and Analysis
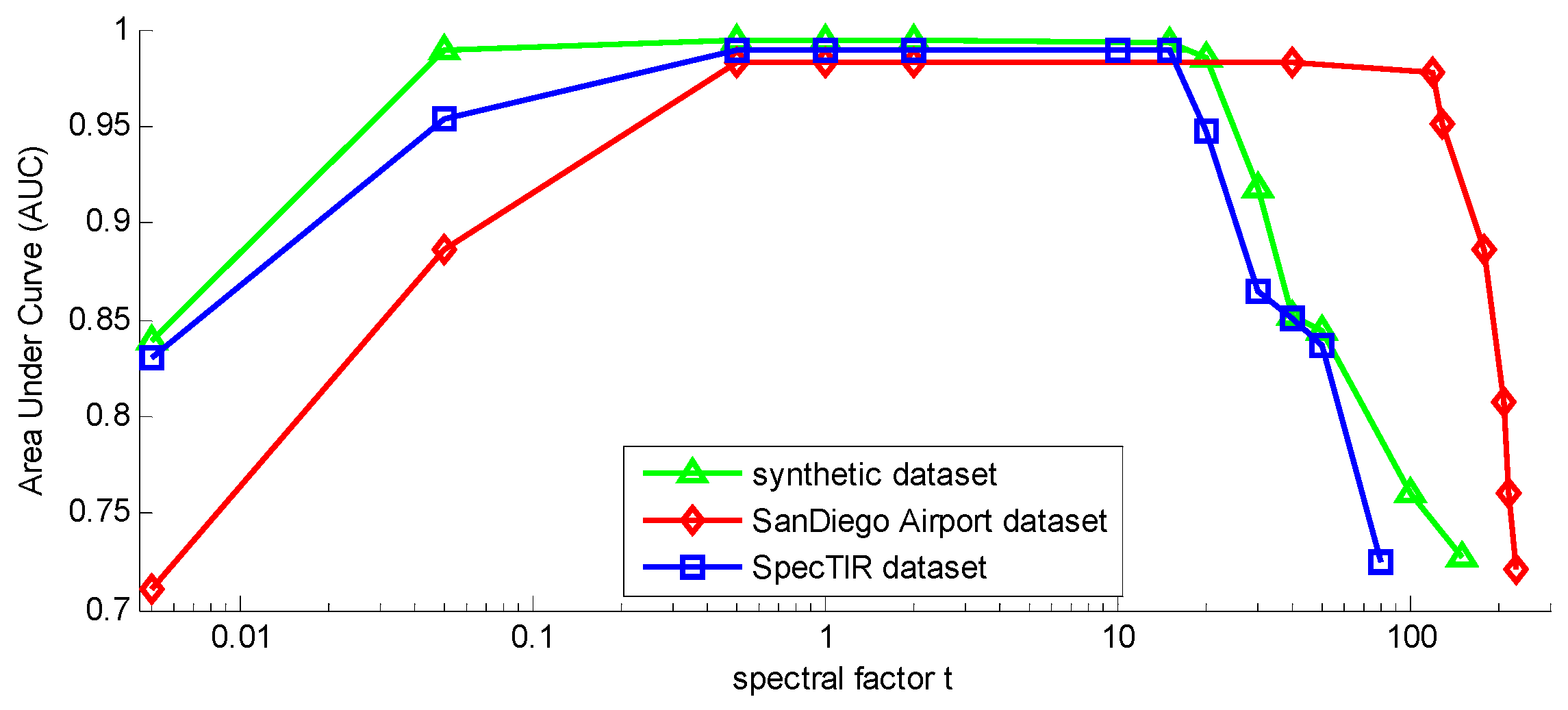
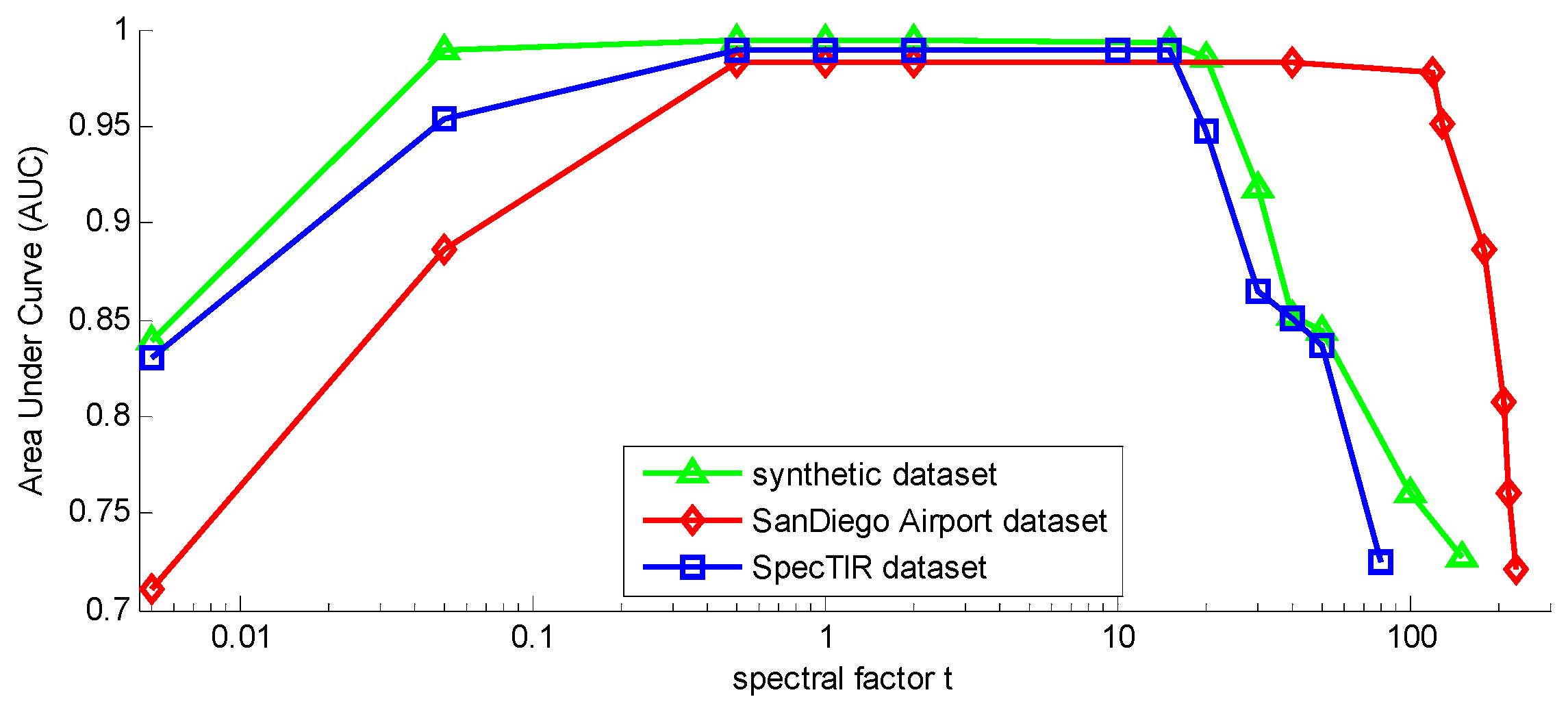
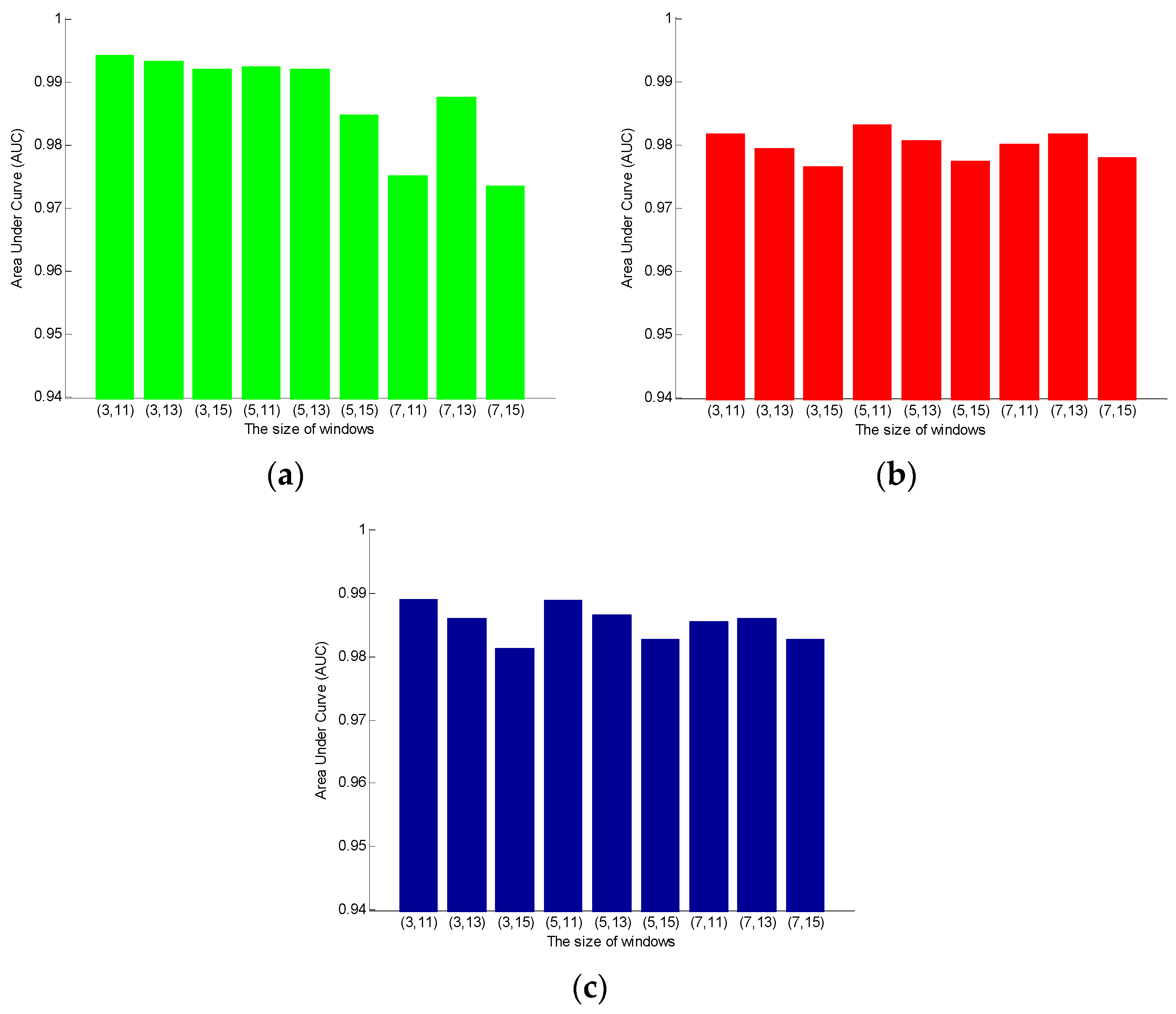
4.1. Effects from the Parameter on WSSKRX
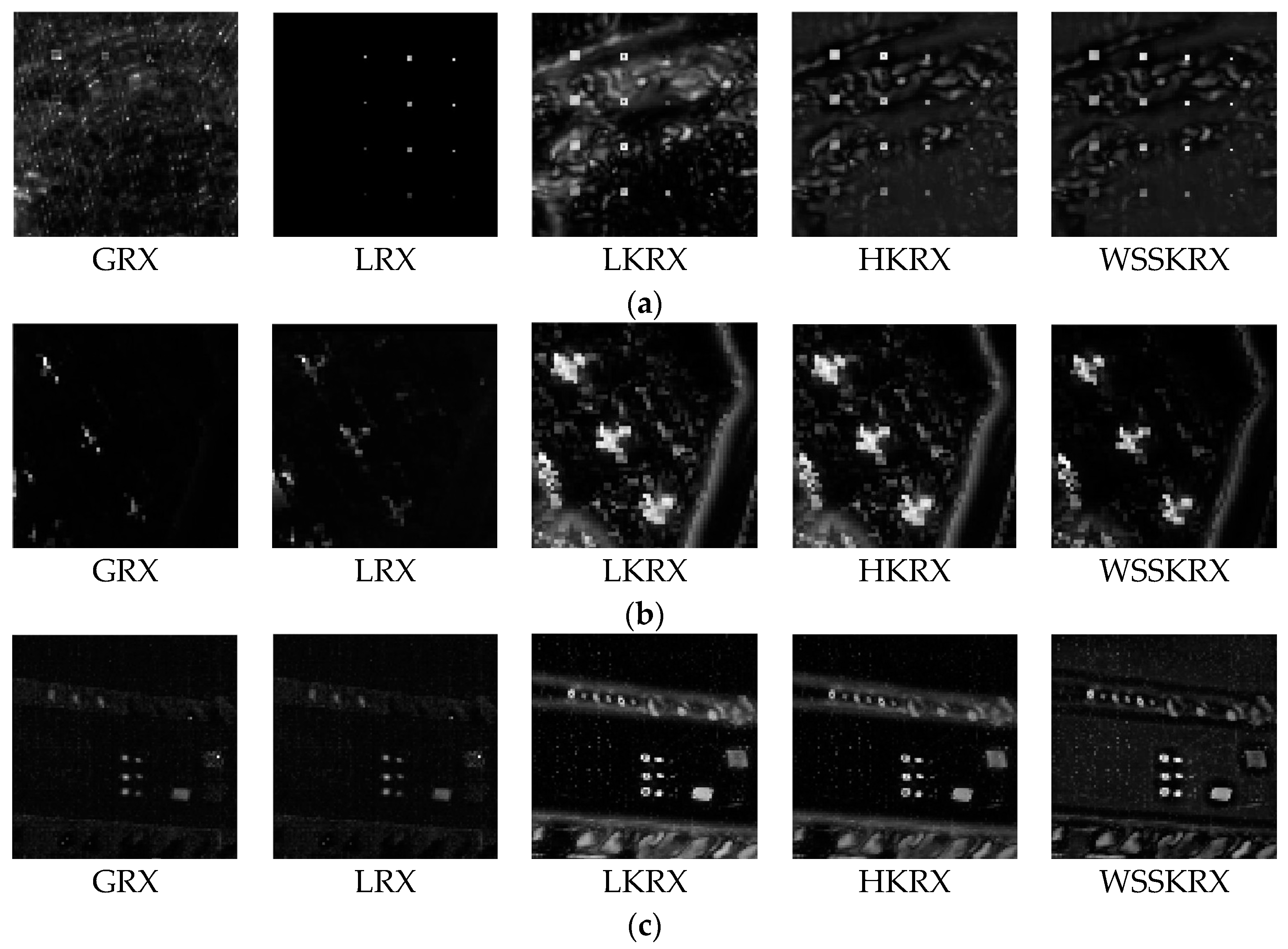
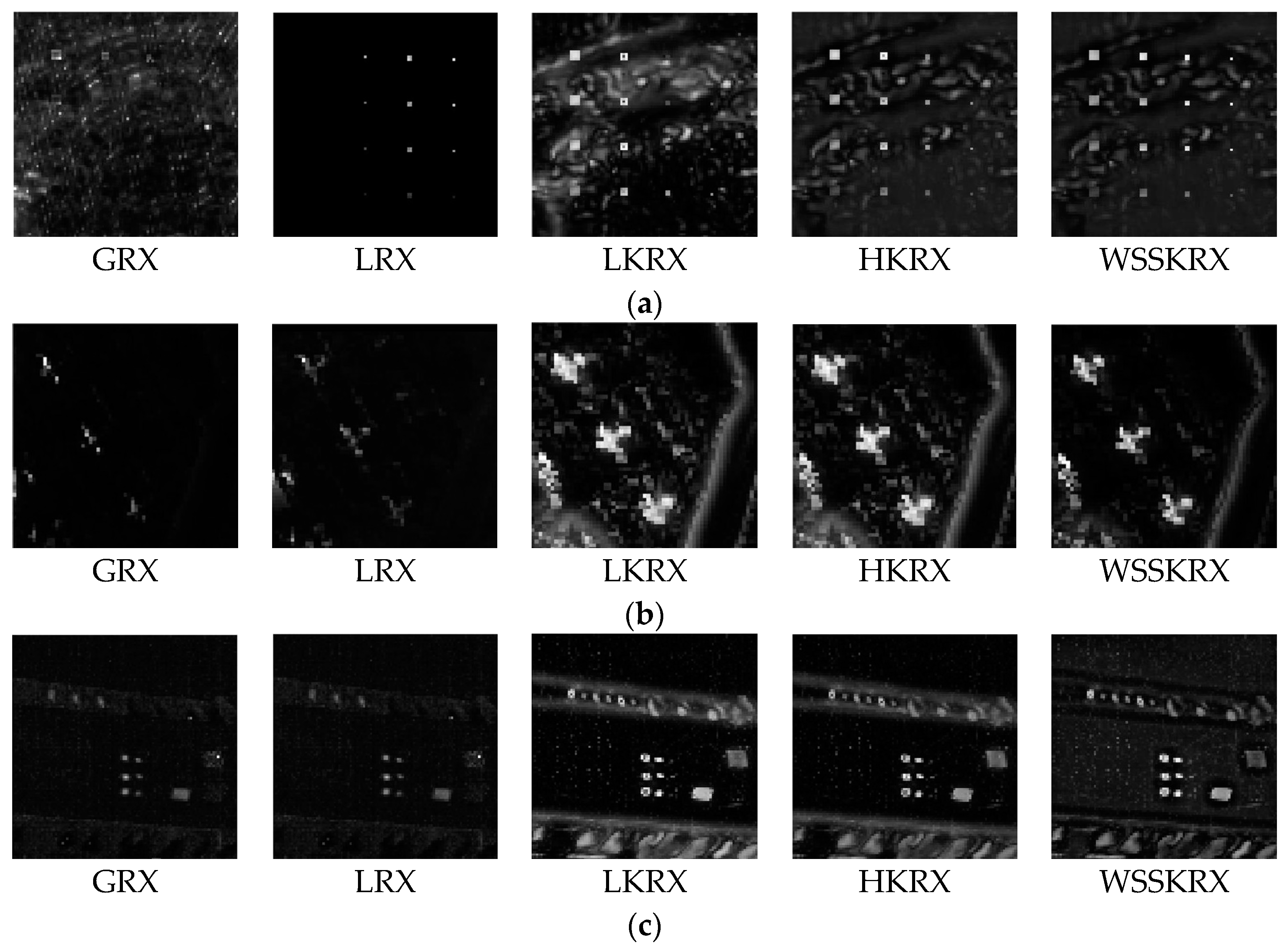
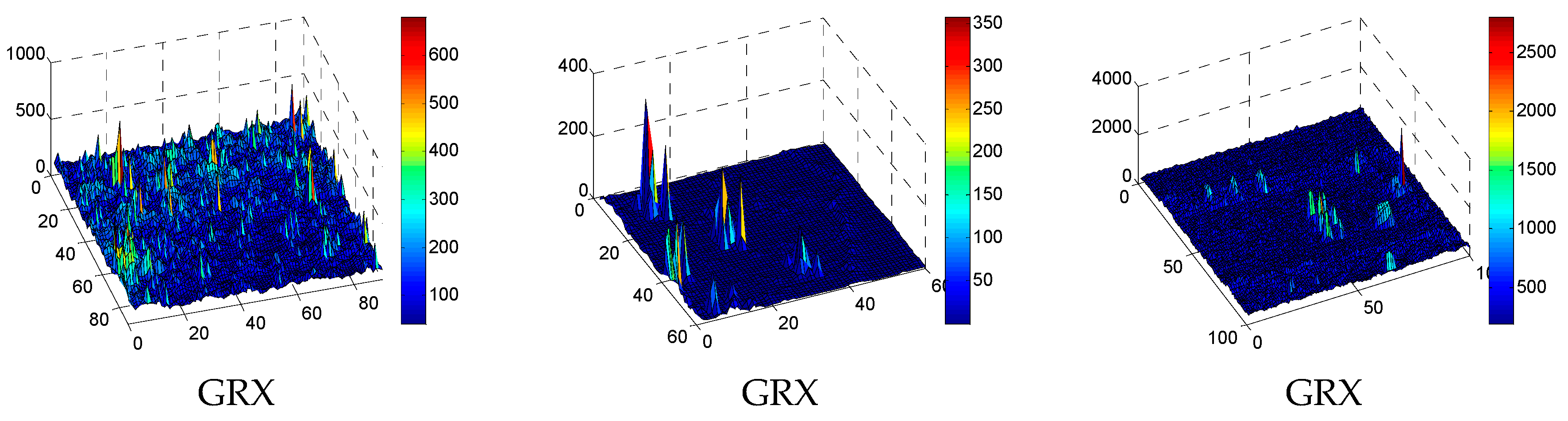
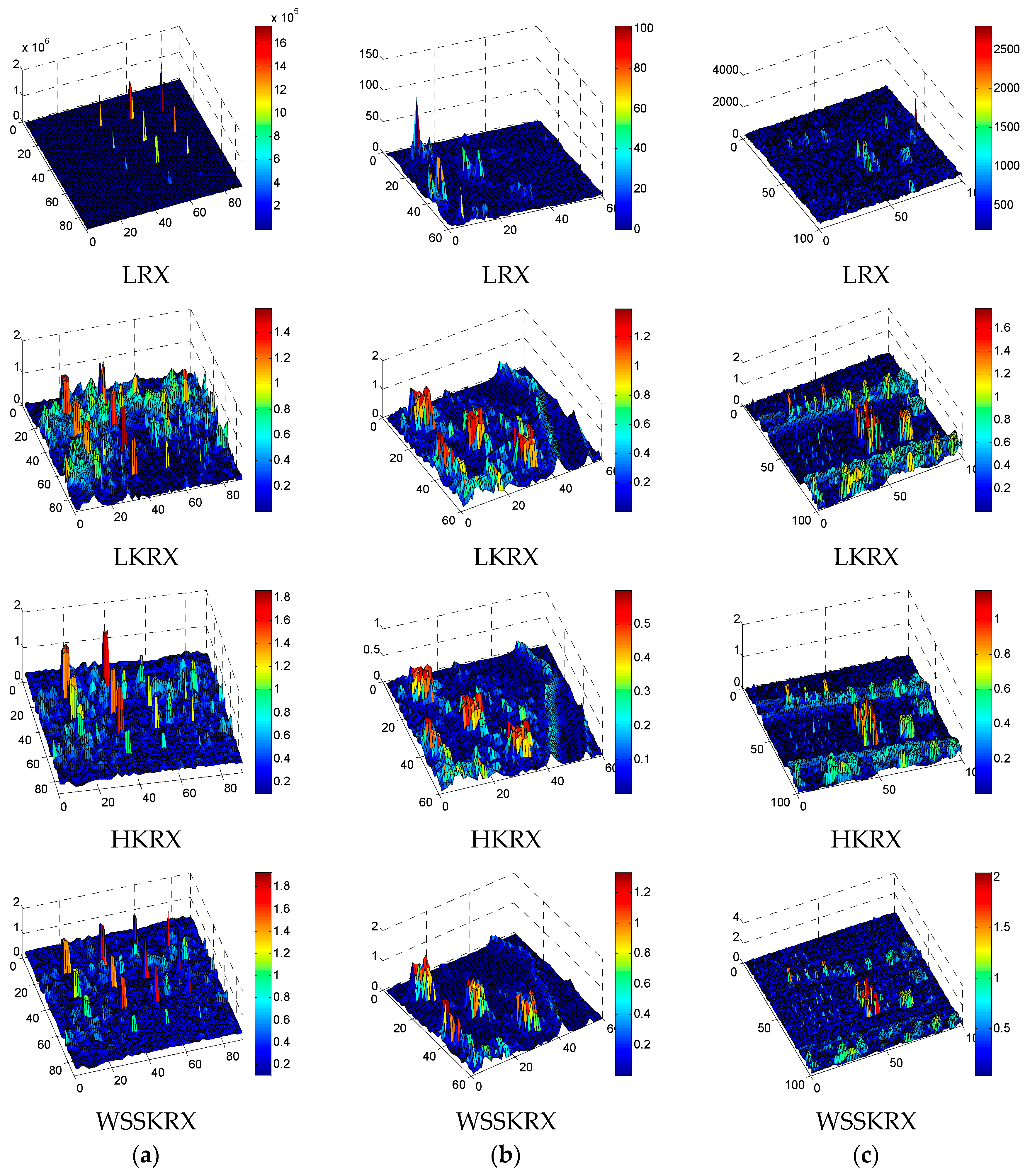
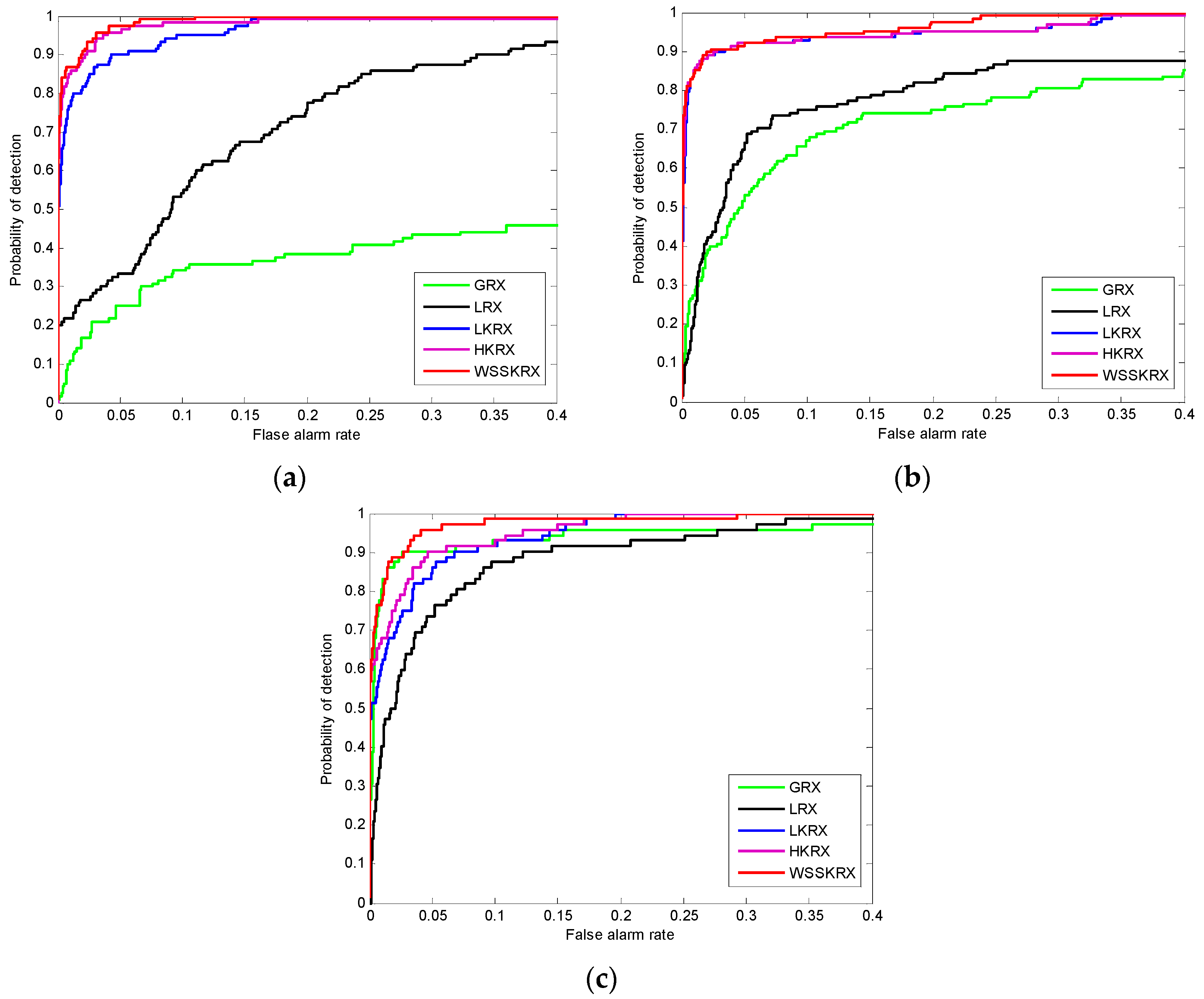
4.2. Detection Accuracy of WSSKRX
4.3. Analysis of Parallel Performance
5. Discussion
6. Conclusions and Future Research Lines
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bajorski, P. Target detection under misspecified models in hyperspectral images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 470–477. [Google Scholar] [CrossRef]
- Du, B.; Zhang, L.P. Random-selection-based anomaly detector for hyperspectral imagery. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1578–1589. [Google Scholar] [CrossRef]
- Khazai, S.; Safari, A.; Mojaradi, B.; Homayouni, S. An approach for subpixel anomaly detection in hyperspectral images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 769–778. [Google Scholar] [CrossRef]
- Ma, L.; Crawford, M.M.; Tian, J. Anomaly detection for hyperspectral images based on robust locally linear embedding. J. Infrared Millim. Terahertz Waves 2010, 31, 753–762. [Google Scholar] [CrossRef]
- Malpica, J.A.; Rejas, J.G.; Alonso, M.C. A projection pursuit algorithm for anomaly detection in hyperspectral imagery. Pattern Recognit. 2008, 41, 3313–3327. [Google Scholar] [CrossRef]
- Yuan, Y.; Wang, Q.; Zhu, G. Fast Hyperspectral Anomaly Detection via High-Order 2-D Crossing Filter. IEEE Trans. Geosci. Remote Sens. 2015, 53, 620–630. [Google Scholar] [CrossRef]
- Yuan, Y.; Ma, D.; Wang, Q. Hyperspectral Anomaly Detection by Graph Pixel Selection. IEEE Trans. Cybern. 2016, 46, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Reed, I.S.; Yu, X. Adaptive multiple-band CFAR detection of an optical pattern with unknown spectral distribution. IEEE Trans. Signal. Process. 1990, 38, 1760–1770. [Google Scholar] [CrossRef]
- Kwon, H.; Nasrabadi, N.M. Kernel RX-algorithm: A nonlinear anomaly detector for hyperspectral imagery. IEEE Trans. Geosci. Remote Sens. 2005, 43, 388–397. [Google Scholar] [CrossRef]
- Dell’Acqua, F.; Gamba, P.; Ferrari, A.; Palmason, J.A. Exploiting spectral and spatial information in hyperspectral urban data with high resolution. IEEE Geosci. Remote Sens. Lett. 2004, 1, 322–326. [Google Scholar] [CrossRef]
- Du, B.; Zhao, R.; Zhang, L.; Zhang, L. A spectral-spatial based local summation anomaly detection method for hyperspectral images. Signal Process. 2016, 124, 115–131. [Google Scholar] [CrossRef]
- Liu, J.; Wu, Z.; Li, J.; Xiao, L. Spatial–Spectral Hyperspectral Image Classification Using Random Multiscale Representation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 1–13. [Google Scholar] [CrossRef]
- Ma, X.; Wang, H.; Wang, J. Semisupervised classification for hyperspectral image based on multi-decision labeling and deep feature learning. ISPRS J. Photogramm. Remote Sens. 2016, 120, 99–107. [Google Scholar] [CrossRef]
- Wang, Q.; Lin, J.; Yuan, Y. Salient Band Selection for Hyperspectral Image Classification via Manifold Ranking. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Paz, A.; Plaza, A. Cluster versus GPU implementation of an orthogonal target detection algorithm for remotely sensed hyperspectral images. In Proceedings of the IEEE International Conference on Cluster Computing, Heraklion, Greek, 20–24 September 2010.
- Wu, X.; Huang, B.; Plaza, A.; Li, Y.; Wu, C. Real-time implementation of the pixel purity index algorithm for endmember identification on GPUs. IEEE Geosci. Remote Sens. Lett. 2014, 11, 955–959. [Google Scholar] [CrossRef]
- Tarabalka, Y.; Haavardsholm, T.V.; Kåsen, I.; Skauli, T. Real-time anomaly detection in hyperspectral images using multivariate normal mixture models and GPU processing. J. Real Time Image Process. 2009, 4, 287–300. [Google Scholar] [CrossRef]
- Quesada-Barriuso, P.; Arguello, F.; Heras, D.B.; Benediktsson, J.A. Wavelet-Based classification of hyperspectral images using extended morphological profiles on graphics processing units. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 2962–2970. [Google Scholar] [CrossRef]
- Molero, J.M.; Garzón, E.M.; García, I.; Plaza, A. Analysis and optimizations of global and local versions of the RX algorithm for anomaly detection in hyperspectral data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 801–814. [Google Scholar] [CrossRef]
- Ruiz, A.; Lopez-De-Teruel, P.E. Nonlinear kernel-based statistical pattern analysis. IEEE Trans. Neural Netw. 2001, 12, 16–32. [Google Scholar] [CrossRef] [PubMed]
- Schölkopf, B.; Smola, A. Learning with Kernels; MIT Press: Cambridge, MA, USA, 2002. [Google Scholar]
- Camps-Valls, G.; Gomez-Chova, L.; Munoz-Mari, J.; Vila-Frances, J. Composite kernels for hyperspectral classification. IEEE Geosci. Remote Sens. Lett. 2006, 3, 93–97. [Google Scholar] [CrossRef]
- Wu, X.; Guo, B.; Chen, C.; Shen, H. A RX-based hyperspectral target detection method by fusing two kernels. In Proceedings of the 2014 7th International Congress on Image and Signal Processing, Dalian, China, 14–16 October 2014.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| San Diego Airport Dataset | Synthetic Dataset | SpecTIR Dataset | |
|---|---|---|---|
| CPU/s | 154.097 | 411.388 | 655.076 |
| GPU/s | 11.154 | 16.320 | 20.624 |
| Speedup | 13.815 | 25.208 | 31.763 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, C.; Li, J.; Meng, M.; Yao, X. A Weighted Spatial-Spectral Kernel RX Algorithm and Efficient Implementation on GPUs. Sensors 2017, 17, 441. https://doi.org/10.3390/s17030441
Zhao C, Li J, Meng M, Yao X. A Weighted Spatial-Spectral Kernel RX Algorithm and Efficient Implementation on GPUs. Sensors. 2017; 17(3):441. https://doi.org/10.3390/s17030441
Chicago/Turabian StyleZhao, Chunhui, Jiawei Li, Meiling Meng, and Xifeng Yao. 2017. "A Weighted Spatial-Spectral Kernel RX Algorithm and Efficient Implementation on GPUs" Sensors 17, no. 3: 441. https://doi.org/10.3390/s17030441
APA StyleZhao, C., Li, J., Meng, M., & Yao, X. (2017). A Weighted Spatial-Spectral Kernel RX Algorithm and Efficient Implementation on GPUs. Sensors, 17(3), 441. https://doi.org/10.3390/s17030441