
Hybrid Analytical and Data-Driven Modeling for Feed-Forward Robot Control †


Abstract
:1. Introduction
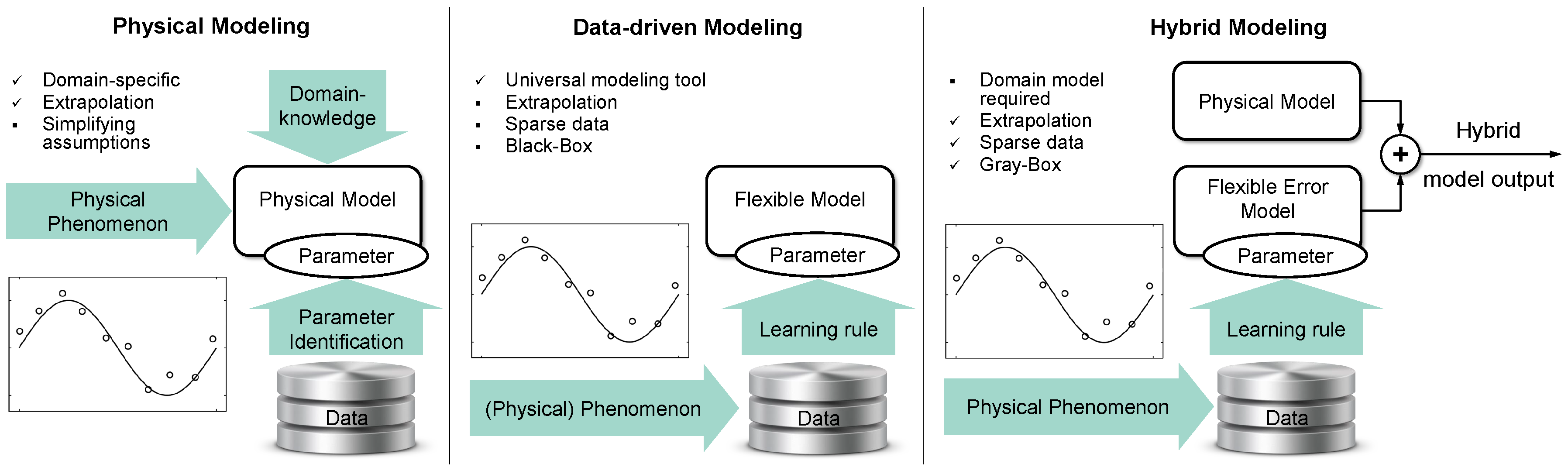
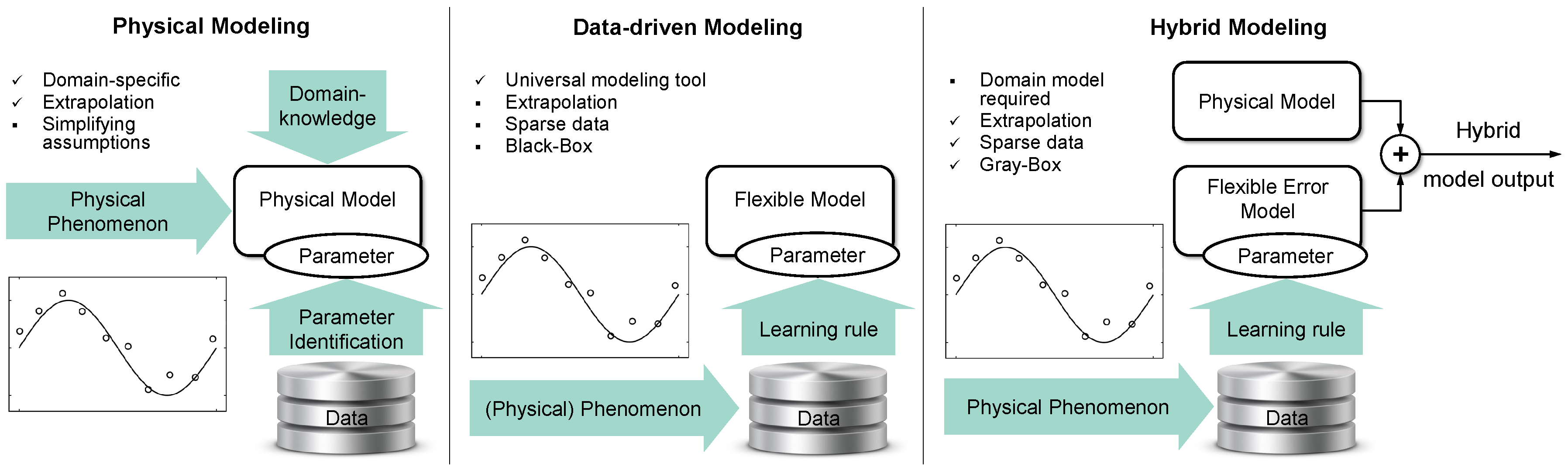
2. Hybrid Modeling
- (A)
- The analytical model: In principle, any analytical model of a plant can be used in hybrid modeling. Naturally, the better and more accurate this model is, the easier the remaining learning task. Therefore, while in theory very coarse approximations could be used, it will in practice be important to capture at least some of the main non-linearities and difficulties of the task-relevant mechanism in the analytical part. Here, the relation to the task, usually a specific control objective, is important. For instance, in robotics the analytical inverse dynamics model, which is used for computed torque-control, requires kinematic information, however in an implicit way. The form of this dynamic model is textbook knowledge and no explicit kinematics model is needed. In inverse kinematics velocity control, however, the inverse of the explicit kinematics is needed for control. Then we have different options for modeling, namely forward kinematics modeling plus local inversion or direct inverse kinematics modeling. Both lead to respectively different approaches in hybrid modeling as well, because in the former case the learned error model also has to be inverted. In the latter case different and not so easy to obtain training data is needed due to redundancies of the kinematics and resulting non-convexity of the direct inverse modeling problem [6]. Furthermore, reduced models are used in practice like the already mentioned SLIP model for floating bases. Another example, as discussed in Section 3 below, is approximate continuum kinematics which may be used for soft robots, because no better model is easily available. In these cases, a hybrid model additionally has to deal with the approximation errors.
- (B)
- The data: In the hybrid modeling approach, data is always needed to train the error model, but often also for parameter identification of the analytical model. Ideally, the same data can be used and the learning approach can benefit from parameter identification theory. Methods to excite the plant in optimal ways to reflect all relevant dynamical phenomena in the measurable data have been studied in that domain, e.g., [2]. To obtain such data is also a precondition for the learning approach, because nothing can be captured through machine learning that is not present in the data. However, for machine learning the issue of data acquisition is more intricate because the amount and density of the available data may strongly determine the choice of the learning algorithm and its underlying representation model. The issue of overfitting, that is too high-model complexity that fits too few data too well and then leads to poor generalization, is a persistent issue for robots and other physical plants. Overfitting can be mitigated by collecting additional data. However, data collection is expensive if real-world action must be executed to generate a training sample. Thus the “know your data”-principle also applies in the hybrid modeling context as in any data-based method, whereas data acquisition can benefit from well-founded data collection schemes from the domain.
- (C)
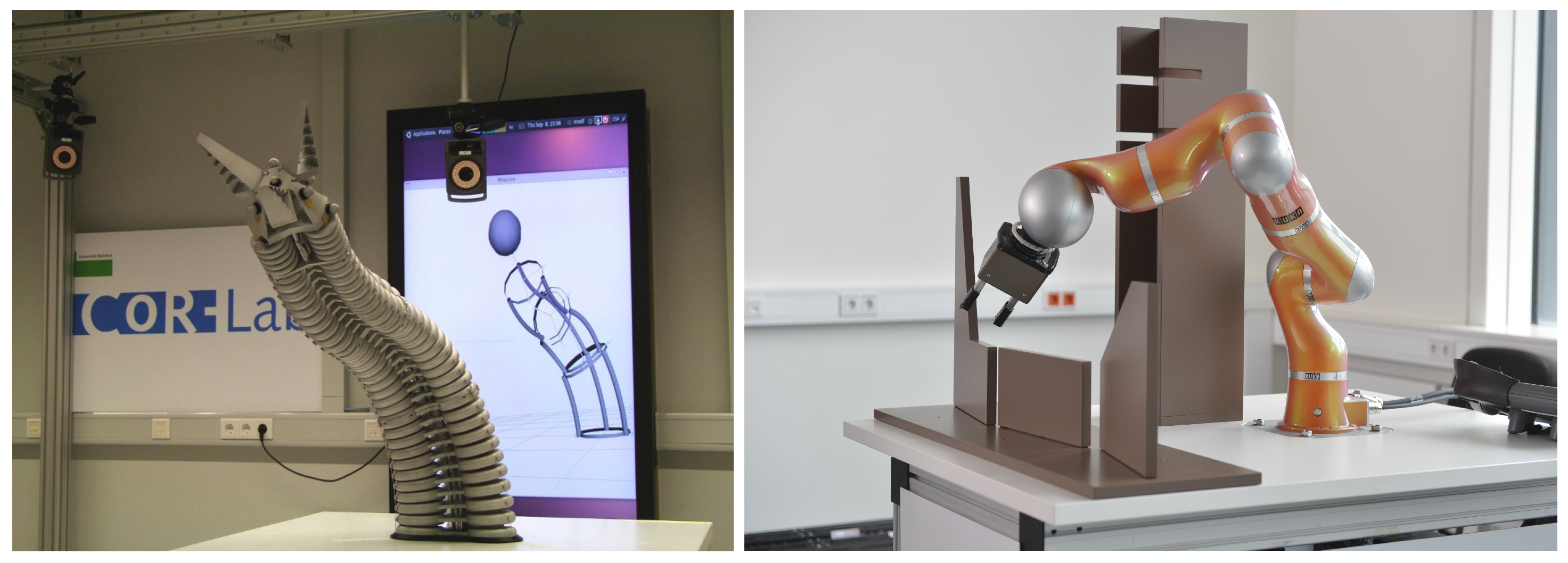
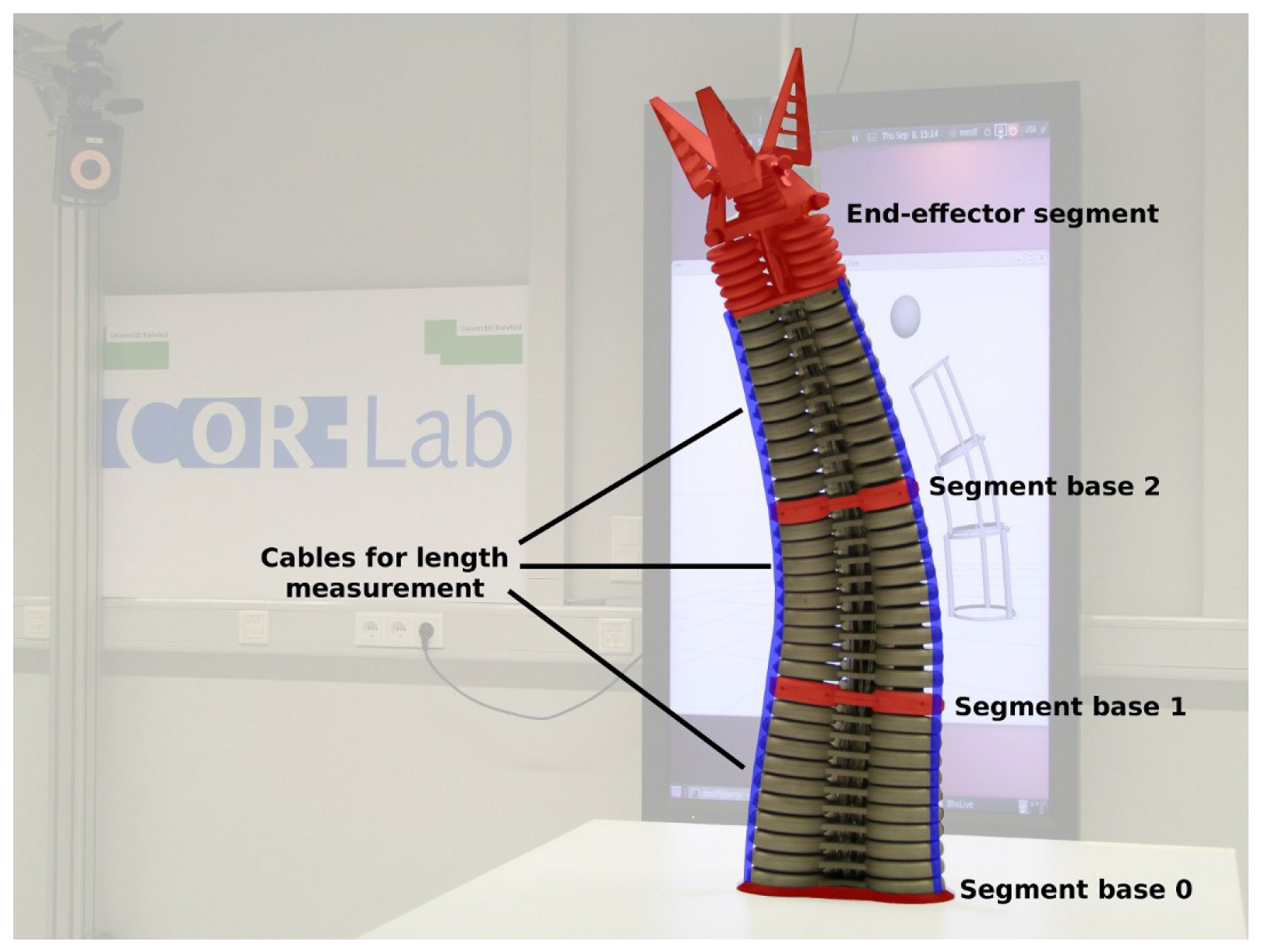
- The learning algorithm: The choice of the learning algorithm and its underlying representation naturally has an important impact on the overall performance of the approach. In principle, any learner may be used and various approaches have been tried in practice. To discuss all possible aspects is beyond the scope of this work, but some particular issues for hybrid modeling deserve mentioning. First, in control applications a distinct value needs to be applied and maintaining distributions for repeated sampling is not in the focus. Thus both deterministic and probabilistic methods are reasonable and often perform similarly, because the latter apply a subsequent decision stage to arrive at a well defined output value. Then many of the well-known algorithms internally compute effectively the same type of representation, a “unified regression model” [22] based on a superposition of Gaussian basis functions, as was recently shown in the excellent review [22]. In hybrid modeling, it is more important for the choice of the learning algorithm whether such local learner (e.g., Radial Basis Functions, Gaussian Mixture Models, Gaussian Processes, Locally Weighted Projection Regression, local linear regression) shall be employed, or a learner based on global basis functions like, e.g., Multi-layer Perceptrons or Extreme Learning Machines. The local approach assumes that no extrapolation is needed and desired. Consequently models can be designed such that outputs are zero far away from the training data (e.g., Radial Basis Function network variant described in Section 3.3). This is well suited for trajectory-based approaches, where a particular predefined task has to be tracked. If extrapolation beyond the training data is desired, e.g., in explorative learning, a global internal representation may be better suited. The difference is demonstrated below in Section 3 in the soft-robot use case.Second, the data obtained is often sparse and therefore strong biases, that is assumptions about the character of the learning problem, are needed to enable generalization from this sparse data. In practice, it is important to control model complexity in terms of number of basis functions, number of parameters, or by means of regularization as overfitting is often a serious problem. In hybrid modeling applications, some knowledge about the underlying physical processes is typically available. A method to use this knowledge in form of additional constraints for the learner and to mediate the problem of sparse data through such additional bias has been developed in [23] and applied to learn an inverse equilibrium model of the dynamics for the soft robot shown in Figure 1.Third, in control applications often the model has to be inverted and/or differentiated and thus a learner that is algebraically differentiable can be very useful. For instance, in inverse velocity control in robotics it is desired to re-compute and invert the Jacobians in every control cycle. Some learners can enable this, as is demonstrated also below in Section 3. Finally, in critical applications it may be desired or required to give guarantees about the learner’s performance. To this aim, in [23] a method has been developed that can proof that after learning certain predefined constraints are observed.
- (D)
- The performance criterion: Finally, a performance criterion has to be defined for evaluation of the approach. This is seemingly trivial, but in practice tricky, because the modeling error can hardly be evaluated against ground truth and the performance of the learner on the training data alone is not significant. In most cases, task performance of the hybrid model is more important, which lends in control applications to standard error measures like tracking accuracy along a task trajectory or for a grid of reference positions in kinematic control. However, within a control application often the controller guarantees tracking and more indirect performance criteria must be employed. For instance, the reduction of gains for comparable accuracy has been proposed as criterion in inverse dynamics modeling [14,18], which is also desirable to reduce strain on the mechanism. Unfortunately, this level of performance measurement does not directly feed back to the learning algorithms. Therefore, in most cases the learning system has to be evaluated during training on the data only, independent of the final performance goal. Consequently, special attention has to be paid to the connection between performance criteria with respect to the learning/modeling and task execution.
3. Hybrid Forward Kinematics for a Soft Robot
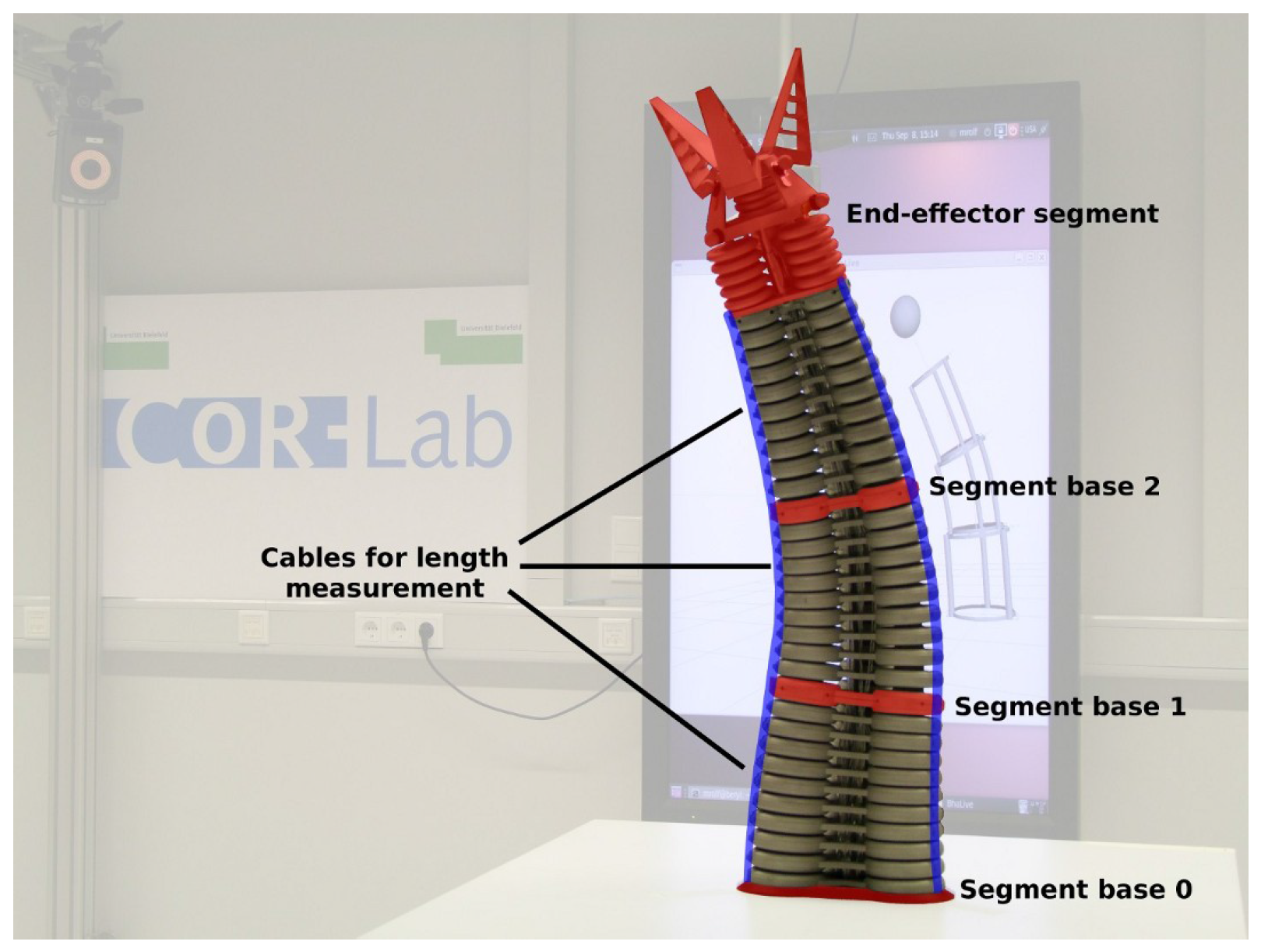
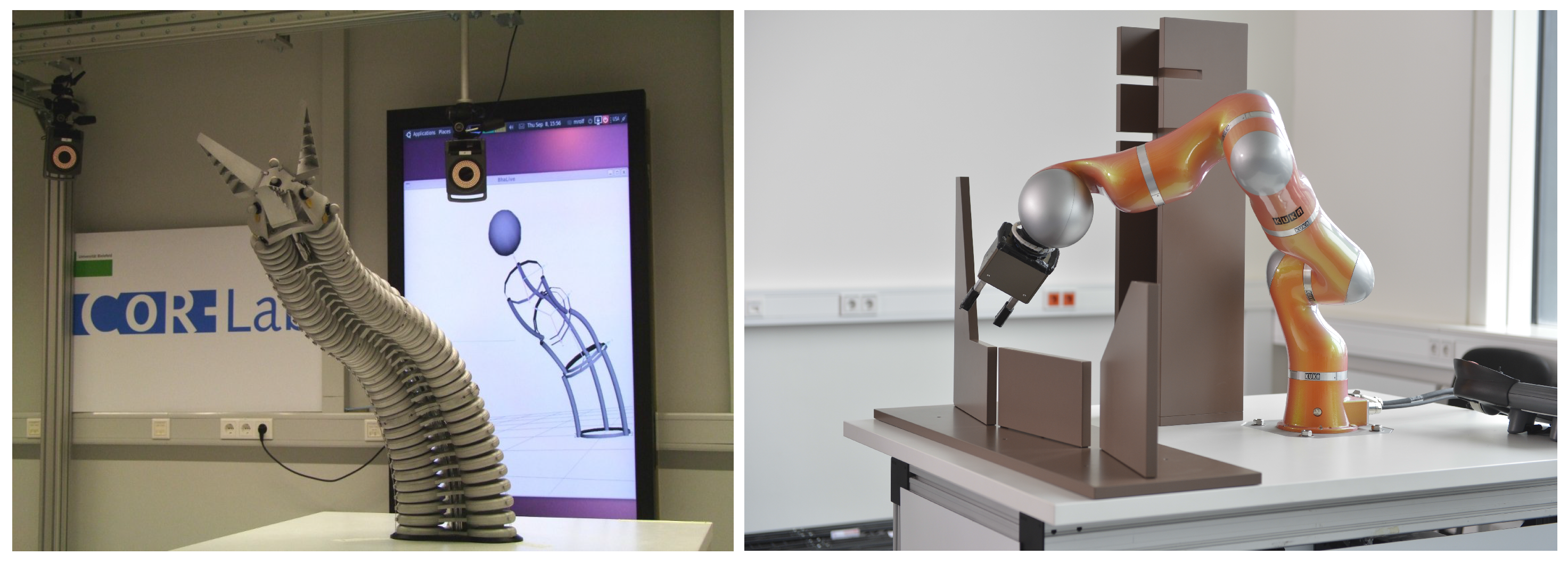
3.1. Bionic Handling Assistant (BHA)
3.1.1. Constant Curvature Model of the Forward Kinematics
3.1.2. Differential Inverse Kinematics
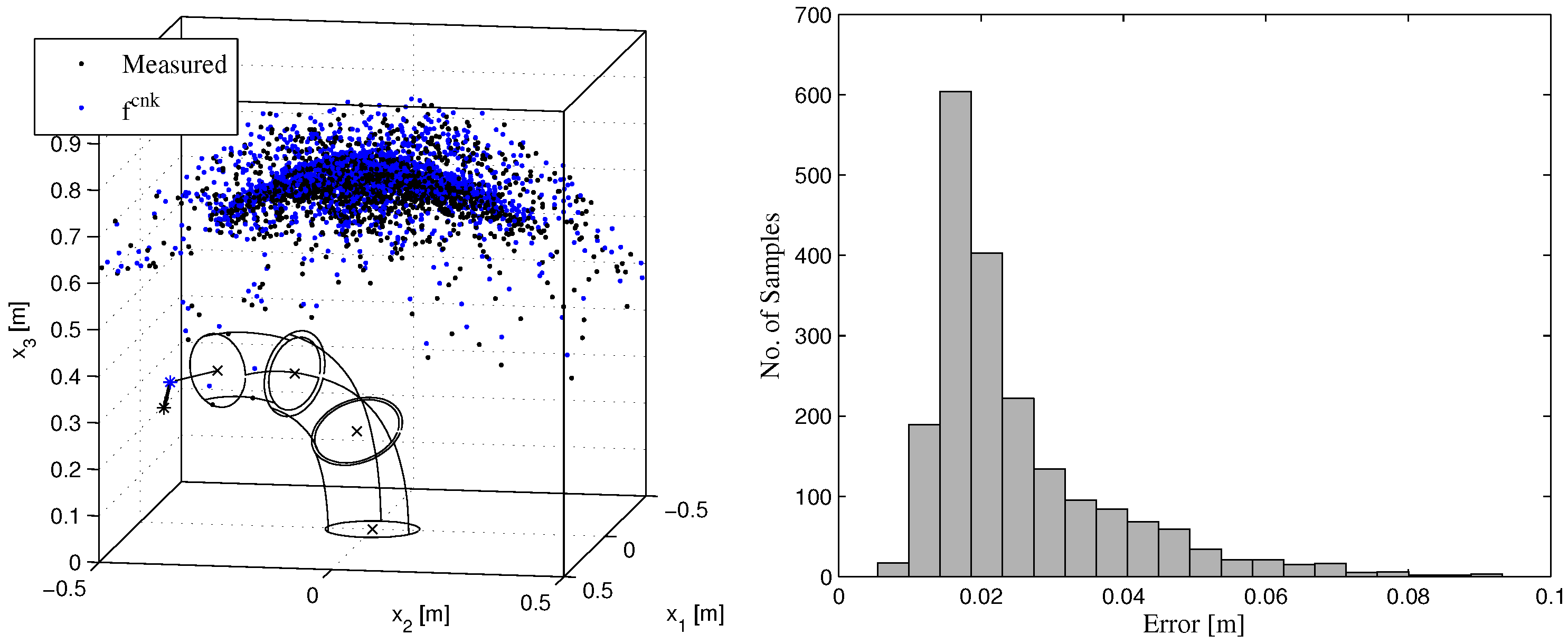
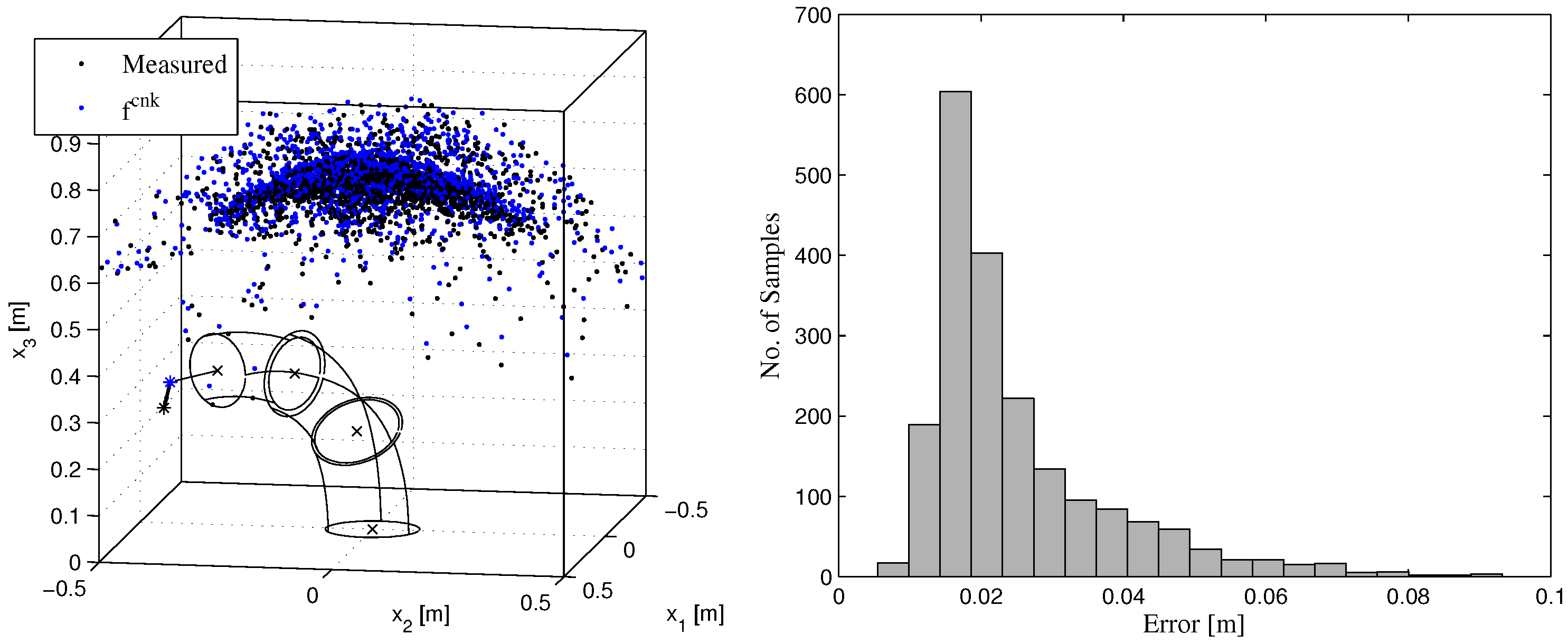
3.1.3. Error of the Constant Curvature Kinematic Model
3.2. Data-Driven and Hybrid Forward Models
3.3. Linear Models, Extreme Learning Machines, and Radial Basis Functions
- Linear Model: A linear model of the form is trained by linear regression as a baseline.
- Extreme Learning Machine (ELM, [29]): Extreme Learning Machines are feed-forward neural networks with a single hidden layer and an efficient training scheme based on linear regression. The output of the network is computed according towhere is a sigmoid activation function applied component-wise to the synaptic summations . In comparison to classical training of feed-forward neural networks by gradient descent through error backpropagation, ELMs restrict learning to the connections from the hidden layer to the outputs. The number of hidden neurons H is chosen large in comparison to the number of inputs. The input weights and biases are initialized randomly and remain fixed. In this paper, the components of and are drawn from a uniform distribution with range . Inputs are scaled to range . The idea of using feed-forward neural networks with a random hidden layer has been proposed earlier, e.g., in [30].Learning aims at minimization of the sum of squared errors with regularization termwhere is the target output for input . Minimization of Equation (4) with respect to is a convex optimization problem, which can be solved efficiently by linear regression. The optimal output weight matrix is given bywhere and collect the hidden neuron activations and target outputs for all samples row-wise. The regularization parameter allows for the continuous selection of the model complexity.
- Radial Basis Functions (RBF, [31]): We also apply a variant of Radial Basis Functions to learn error models. The basis functions take the formwhere is the center and ς the width of the i-th basis function, respectively. Training proceeds in two phases. First, the set of basis function centers is initialized in an unsupervised manner using a simple clustering algorithm. The clustering algorithm adds sample to the set of basis function centers if . Then, the output matrix is computed according to Equation (5), where the radial basis functions from Equation (6) are used in Equation (3). This RBF implementation has the property that the minimal distance between radial basis function centers and their region of activation can be intuitively parameterized by radius r and basis function width ς. Further, the basis function responses and hence approach to zero, i.e., , for all inputs far away from the training data. With this choice of the basis functions, the learner is biased towards learning of error models with heavily restricted extrapolation capabilities. This illustrates the arguments made in Section 2-(C).
3.3.1. Learning of Pure Data-Driven Models and Error Models
3.3.2. Generalization of the Learned Models
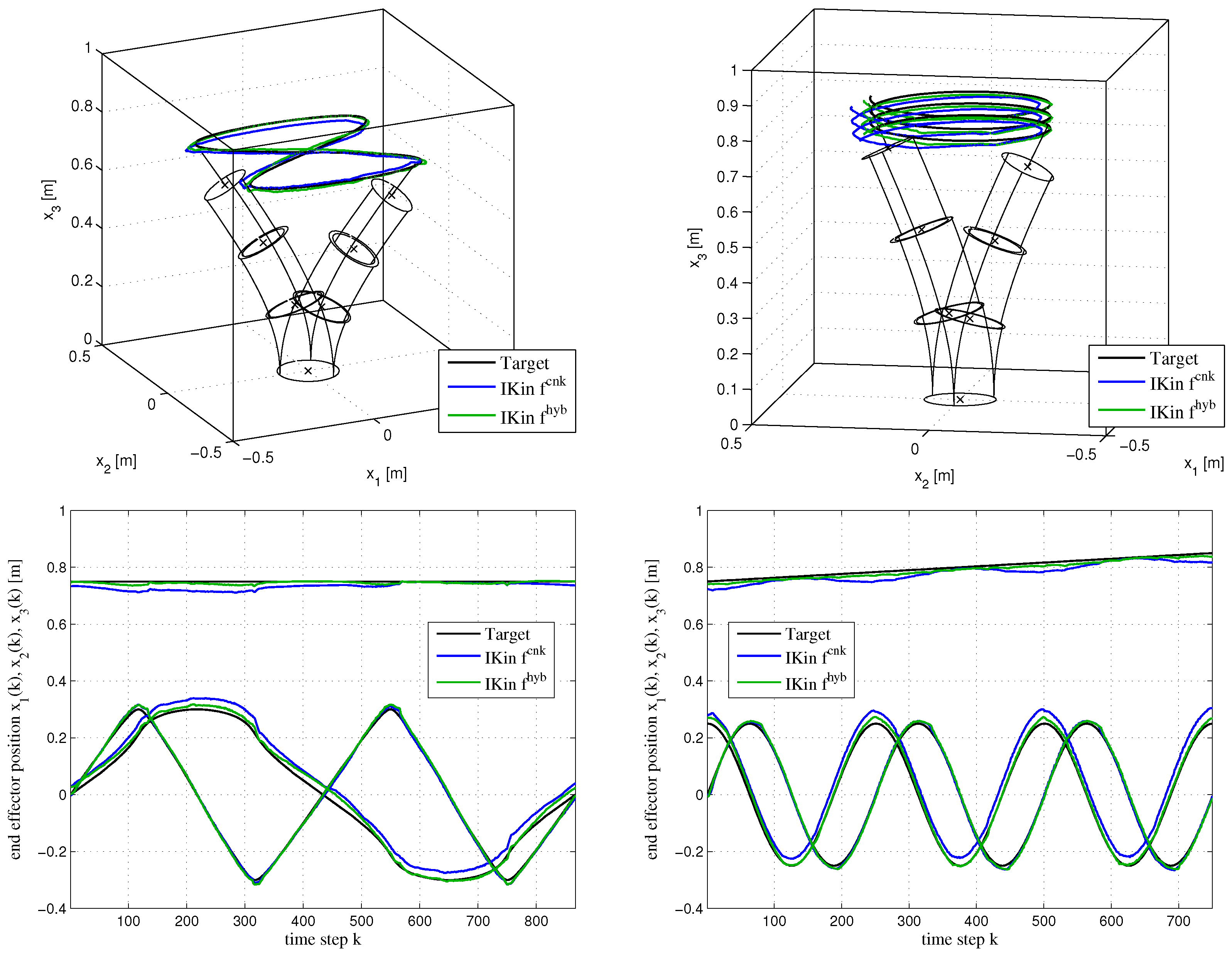
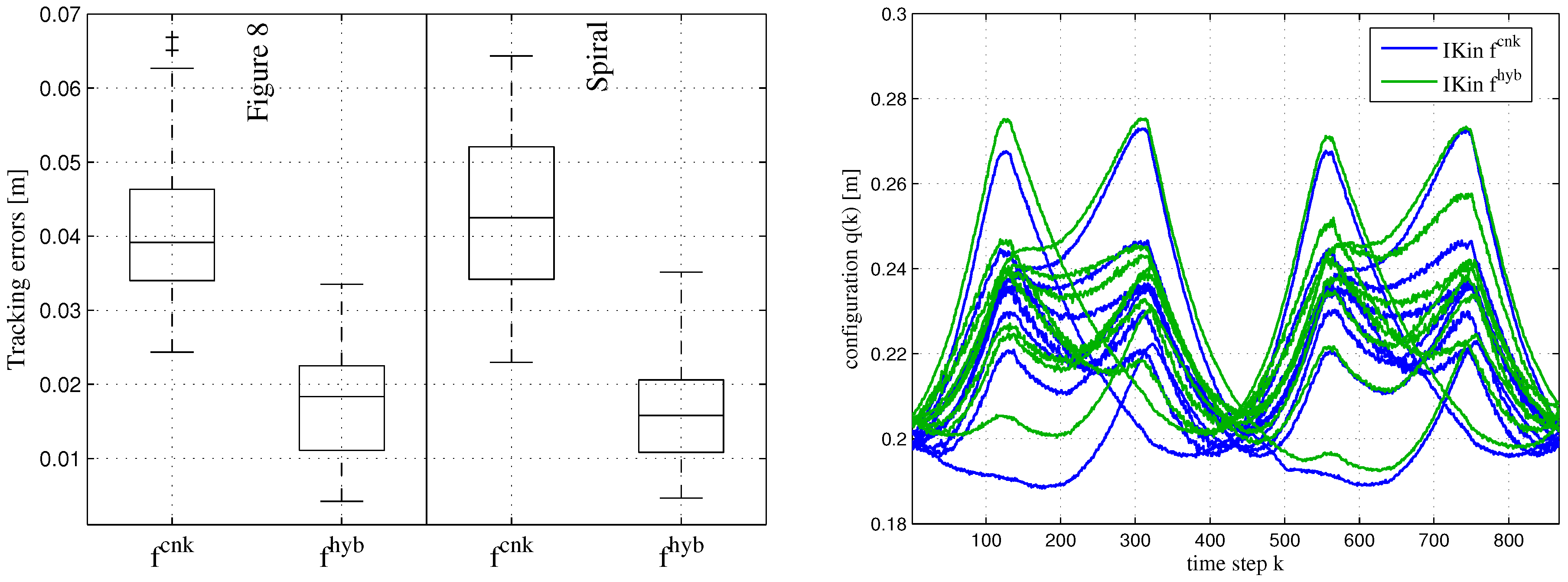
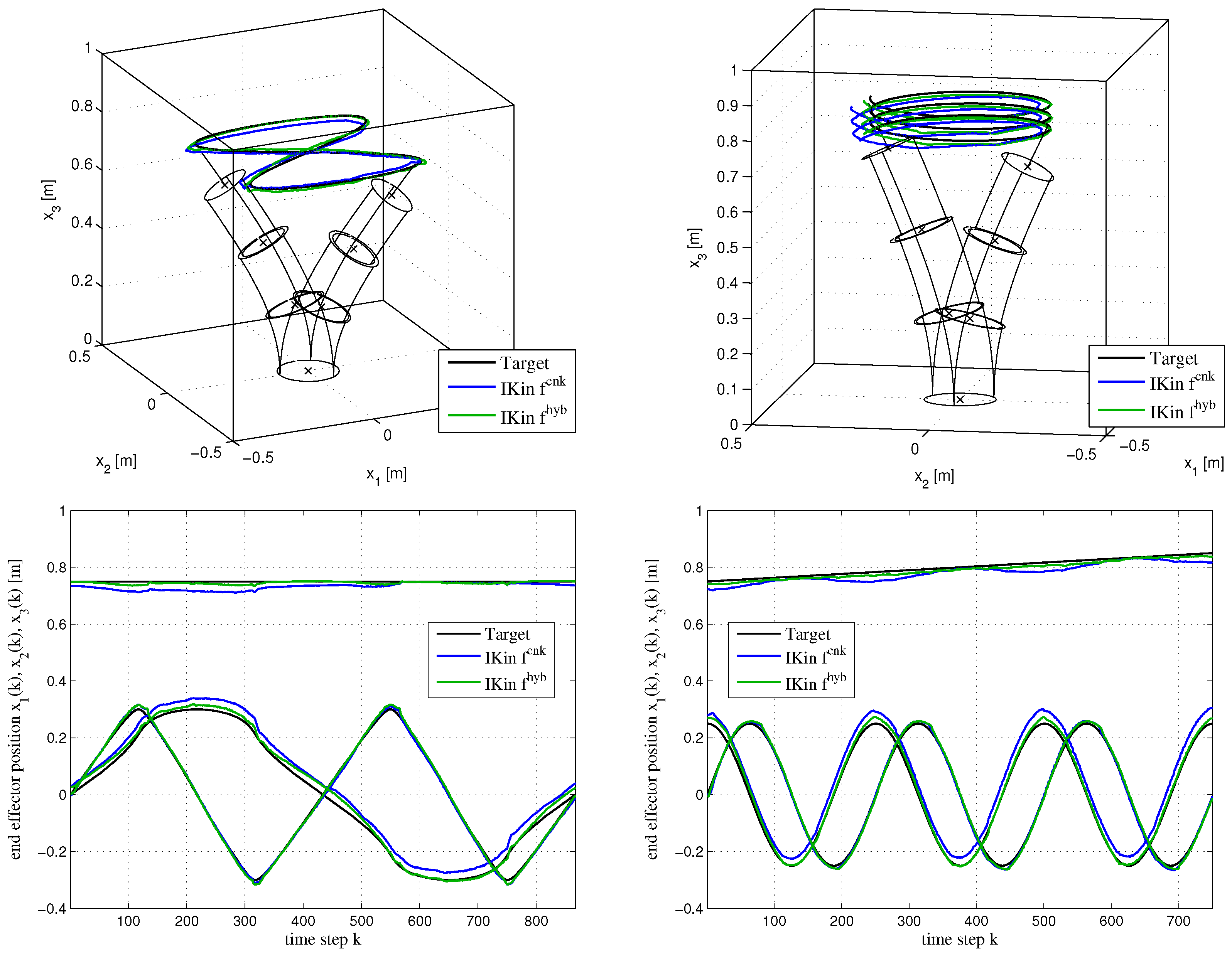
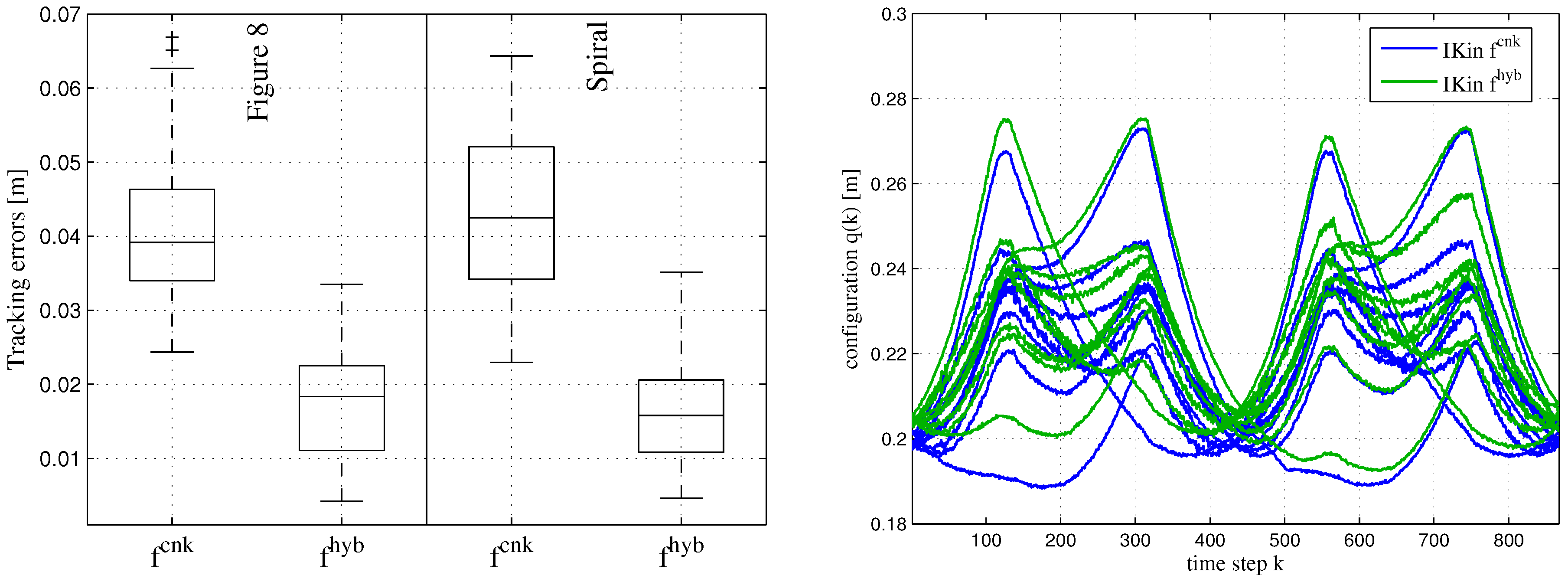
3.4. Inverse Kinematics with a Hybrid Forward Model
4. Hybrid Inverse Dynamics for a Rigid Robot
4.1. The Approximate Analytic Dynamic Model of KUKA LWR IV+
4.2. Data Acquisition
4.3. Independent Joint Learning (IJL)
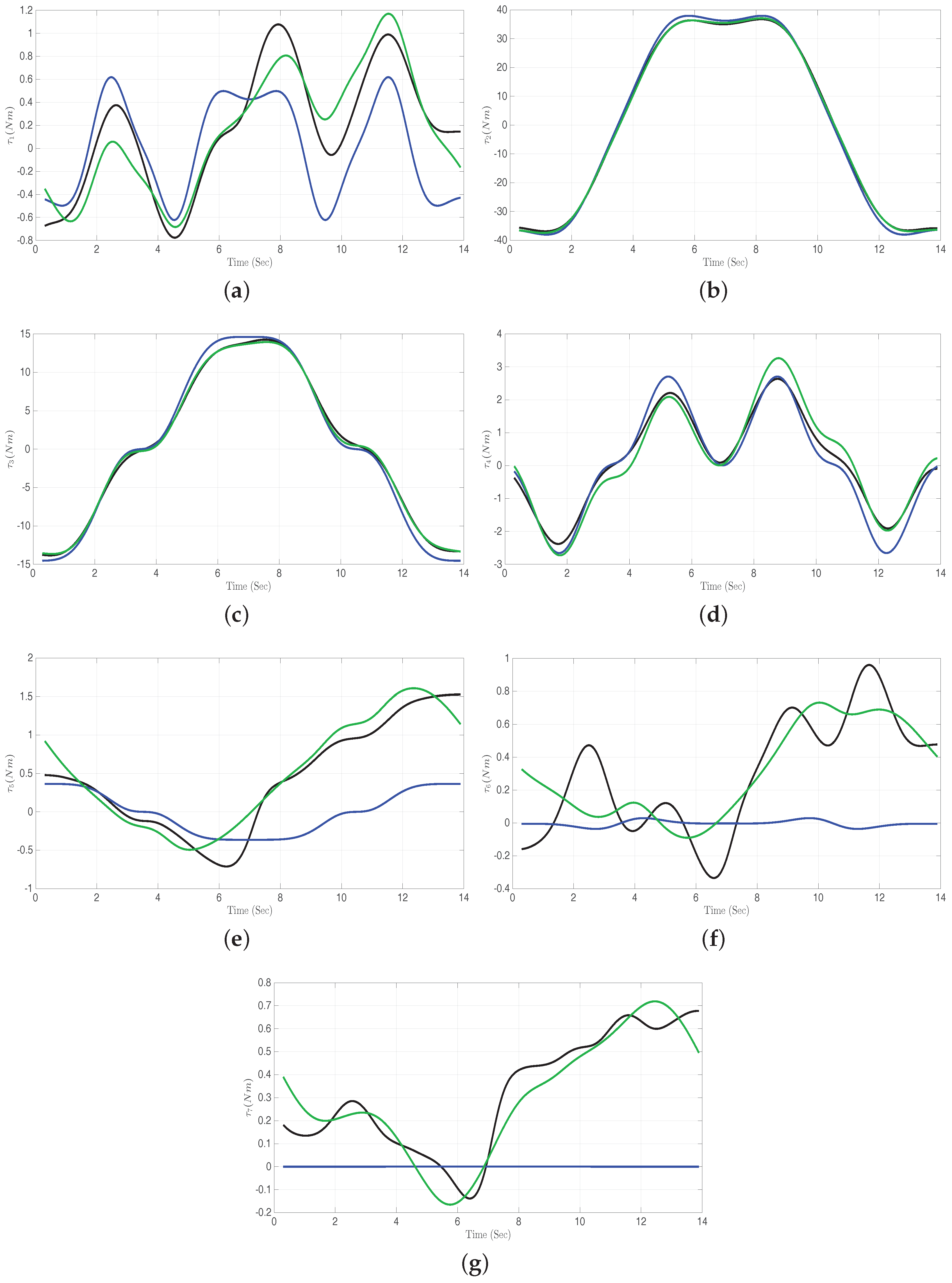
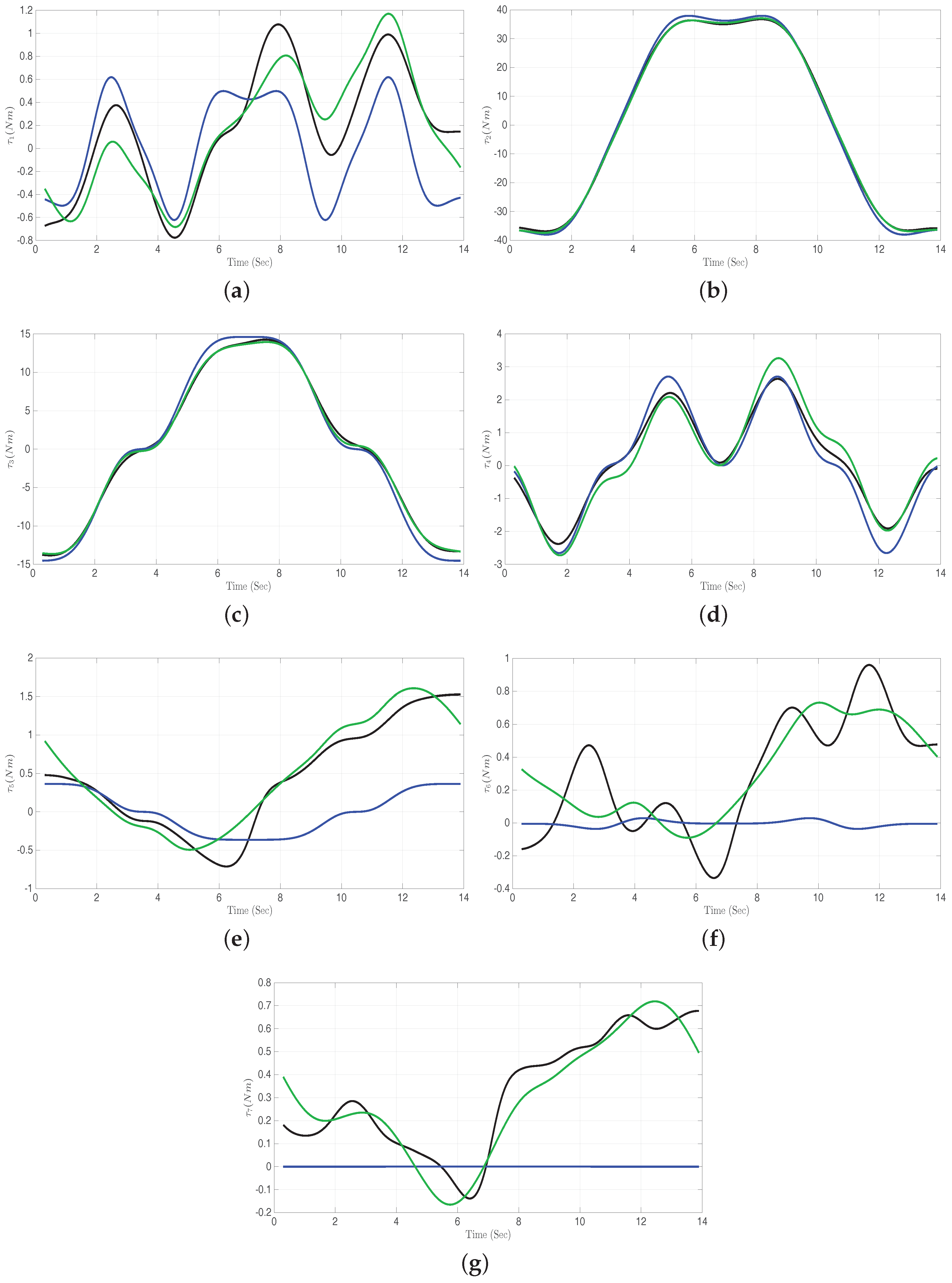
4.4. Experimental Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Traversaro, S.; Prete, A.D.; Ivaldi, S.; Nori, F. Inertial parameters identification and joint torques estimation with proximal force/torque sensing. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 2105–2110.
- Vantilt, J.; Aertbeliën, E.; Groote, F.D.; Schutter, J.D. Optimal Excitation and Identification of the Dynamic Model of Robotic Systems with Compliant Actuators. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 2117–2124.
- Velthuis, W.; de Vries, T.; van Amerongen, J. Learning feedforward control of a flexible beam. In Proceedings of the IEEE International Symposium on Intelligent Control, Dearborn, MI, USA, 15–18 September 1996; pp. 103–108.
- Schaal, S.; Atkeson, C.G.; Vijayakumar, S. Scalable Techniques from Nonparametric Statistics for Real Time Robot Learning. Appl. Intell. 2002, 17, 49–60. [Google Scholar] [CrossRef]
- Nguyen-Tuong, D.; Seeger, M.; Peters, J. Computed torque control with nonparametric regression models. In Proceedings of the American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 212–217.
- Rolf, M.; Steil, J.; Gienger, M. Goal Babbling Permits Direct Learning of Inverse Kinematics. IEEE Trans. Auton. Ment. Dev. 2010, 2, 216–229. [Google Scholar] [CrossRef]
- Rolf, M.; Steil, J. Efficient Exploratory Learning of Inverse Kinematics on a Bionic Elephant Trunk. IEEE Trans. Neural Netw. Learn. Syst. 2014, 25, 1147–1160. [Google Scholar]
- Ting, J.A.; D’Souza, A.; Schaal, S. Bayesian robot system identification with input and output noise. Neural Netw. 2011, 24, 99–108. [Google Scholar] [CrossRef] [PubMed]
- Nguyen-Tuong, D.; Peters, J.; Seeger, M.; Schölkopf, B. Learning Inverse Dynamics: A Comparison. In Proceedings of the European Symposium on Artificial Neural Networks, Bruges, Belgium, 23–25 April 2008; pp. 1–6.
- Nguyen-Tuong, D.; Peters, J. Using model knowledge for learning inverse dynamics. In Proceedings of the IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–8 May 2010; pp. 2677–2682.
- Polydoros, A.S.; Nalpantidis, L.; Krüger, V. Real-time deep learning of robotic manipulator Inverse Dynamics. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; pp. 3442–3448.
- Oestersoetebier, F.; Traphoener, P.; Reinhart, R.F.; Wessels, S.; Traechtler, A. Design and Implementation of Intelligent Control Software for a Dough Kneader. Procedia Technol. 2016, 26, 473–482. [Google Scholar] [CrossRef]
- Um, T.; Park, M.S.; Park, J.M. Independent Joint Learning: A novel task-to-task transfer learning scheme for robot models. In Proceedings of the IEEE International Conference on Robotics and Automation, Hong Kong, China, 31 May–7 June 2014; pp. 5679–5684.
- Caluwaerts, K.; Steil, J.J. Independent Joint Learning in Practice: Local Error Estimates to Improve Inverse Dynamics Control. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Seoul, Korea, 3–5 November 2015; pp. 643–650.
- Reinhart, R.F.; Steil, J.J. Hybrid Mechanical and Data-driven Modeling Improves Inverse Kinematic Control of a Soft Robot. Procedia Technol. 2016, 26, 12–19. [Google Scholar] [CrossRef]
- Shareef, Z.; Mohammadi, P.; Steil, J. Improving the Inverse Dynamics Model of the KUKA LWR IV+ Using Independent Joint Learning. IFAC-PapersOnLine 2016, 49, 507–512. [Google Scholar] [CrossRef]
- Shareef, Z.; Reinhart, F.; Steil, J. Generalizing a learned inverse dynamic model of KUKA LWR IV+ for load variations using regression in the model space. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Daejeon, Korea, 9–14 October 2016; pp. 606–611.
- Meier, F.; Kappler, D.; Ratliff, N.; Schaal, S. Towards robust online inverse dynamics learning. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Daejeon, Korea, 9–14 October 2016; pp. 4034–4039.
- Rolf, M.; Steil, J. Constant curvature continuum kinematics as fast approximate model for the Bionic Handling Assistant. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 3440–3446.
- Mahl, T.; Hildebrandt, A.; Sawodny, O. A Variable Curvature Continuum Kinematics for Kinematic Control of the Bionic Handling Assistant. IEEE Trans. Robot. 2014, 30, 935–949. [Google Scholar] [CrossRef]
- Garofalo, G.; Ott, C.; Albu-Schäffer, A. Walking control of fully actuated robots based on the bipedal slip model. In Proceedings of the IEEE International Conference on Robotics and Automation, St Paul, MN, USA, 14–18 May 2012; pp. 1456–1463.
- Stulp, F.; Sigaud, O. Many regression algorithms, one unified model: A review. Neural Netw. 2015, 69, 60–79. [Google Scholar] [CrossRef] [PubMed]
- Neumann, K.; Rolf, M.; Steil, J.J. Reliable Integration of Continuous Constraints into Extreme Learning Machines. Int. J. Uncertain. Fuzziness Knowl.-Based Syst. 2013, 21, 35–50. [Google Scholar] [CrossRef]
- Grzesiak, A.; Becker, R.; Verl, A. The Bionic Handling Assistant: A success story of additive manufacturing. Assem. Autom. 2011, 31, 329–333. [Google Scholar] [CrossRef]
- Bruno, D.; Calinon, S.; Caldwell, D.G. Null space redundancy learning for a flexible surgical robot. In Proceedings of the IEEE International Conference on Robotics and Automation, Hong Kong, China, 31 May–7 June 2014; pp. 2443–2448.
- Rolf, M.; Neumann, K.; Queißer, J.; Reinhart, R.; Nordmann, A.; Steil, J. A multi-level control architecture for the bionic handling assistant. Adv. Robot. 2015, 29, 847–859. [Google Scholar] [CrossRef]
- Spong, M.; Vidyasagar, M. Robot Dynamics and Control; John Wiley & Sons: Hoboken, NJ, USA, 1989. [Google Scholar]
- VICON Motion Tracking Systems. Available online: http://www.vicon.com (accessed on 9 February 2016).
- Huang, G.B.; Zhu, Q.Y.; Siew, C.K. Extreme learning machine: A new learning scheme of feedforward neural networks. In Proceedings of the IEEE International Joint Conference on Neural Networks, Budapest, Hungary, 25–29 July 2004; Volume 2, pp. 985–990.
- Schmidt, W.; Kraaijveld, M.; Duin, R. Feedforward neural networks with random weights. In Proceedings of the IAPR International Conference on Pattern Recognition, Vol.II. Conference B: Pattern Recognition Methodology and Systems, The Hague, The Netherlands, 30 August–3 September 1992; pp. 1–4.
- Broomhead, D.; Lowe, D. Multivariable Functional Interpolation and Adaptive Networks. Compl. Syst. 1988, 2, 321–355. [Google Scholar]
- Zhang, C.D.; Song, S.M. An efficient method for inverse dynamics of manipulators based on the virtual work principle. J. Robot. Syst. 1993, 10, 605–627. [Google Scholar] [CrossRef]
- Rohmer, E.; Singh, S.P.N.; Freese, M. V-REP: A versatile and scalable robot simulation framework. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1321–1326.
- Corke, P. A robotics toolbox for MATLAB. IEEE Robot. Autom. Mag. 1996, 3, 24–32. [Google Scholar] [CrossRef]
- Gaz, C.; Flacco, F.; Luca, A.D. Identifying the Dynamic Model Used by the KUKA LWR: A Reverse Engineering Approach. In Proceedings of the IEEE International Conference on Robotics and Automation, Hong Kong, China, 31 May–7 June 2014; pp. 1386–1392.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Learning Algorithm | Training Error (cm) | Test Error (cm) |
|---|---|---|---|
| Data-driven model | Linear Model | ||
| Data-driven model | ELM (, ) | ||
| Hybrid model | Linear Model | ||
| Hybrid model | ELM (, ) | ||
| Hybrid model | Radial Basis Functions |
| Joint | MSE in ID Model [35] | MSE for Predicted Torques after IJL | |||
|---|---|---|---|---|---|
| 1 | 0.1757 | 0.0338 | 0.1541 | 0.0328 | 0.0389 |
| 2 | 1.6144 | 0.1744 | 0.6258 | 0.2089 | 0.1864 |
| 3 | 0.8294 | 0.0714 | 0.3385 | 0.3417 | 0.0551 |
| 4 | 0.1052 | 0.0491 | 0.0607 | 0.0969 | 0.0961 |
| 5 | 0.4767 | 0.0236 | 0.2734 | 0.0217 | 0.0355 |
| 6 | 0.2126 | 0.0429 | 0.1022 | 0.0401 | 0.0409 |
| 7 | 0.1585 | 0.0087 | 0.0487 | 0.0059 | 0.0073 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Reinhart, R.F.; Shareef, Z.; Steil, J.J. Hybrid Analytical and Data-Driven Modeling for Feed-Forward Robot Control †. Sensors 2017, 17, 311. https://doi.org/10.3390/s17020311
Reinhart RF, Shareef Z, Steil JJ. Hybrid Analytical and Data-Driven Modeling for Feed-Forward Robot Control †. Sensors. 2017; 17(2):311. https://doi.org/10.3390/s17020311
Chicago/Turabian StyleReinhart, René Felix, Zeeshan Shareef, and Jochen Jakob Steil. 2017. "Hybrid Analytical and Data-Driven Modeling for Feed-Forward Robot Control †" Sensors 17, no. 2: 311. https://doi.org/10.3390/s17020311