A Practical, Robust and Fast Method for Location Localization in Range-Based Systems



Abstract
1. Introduction
2. Methodology
2.1. The Theory
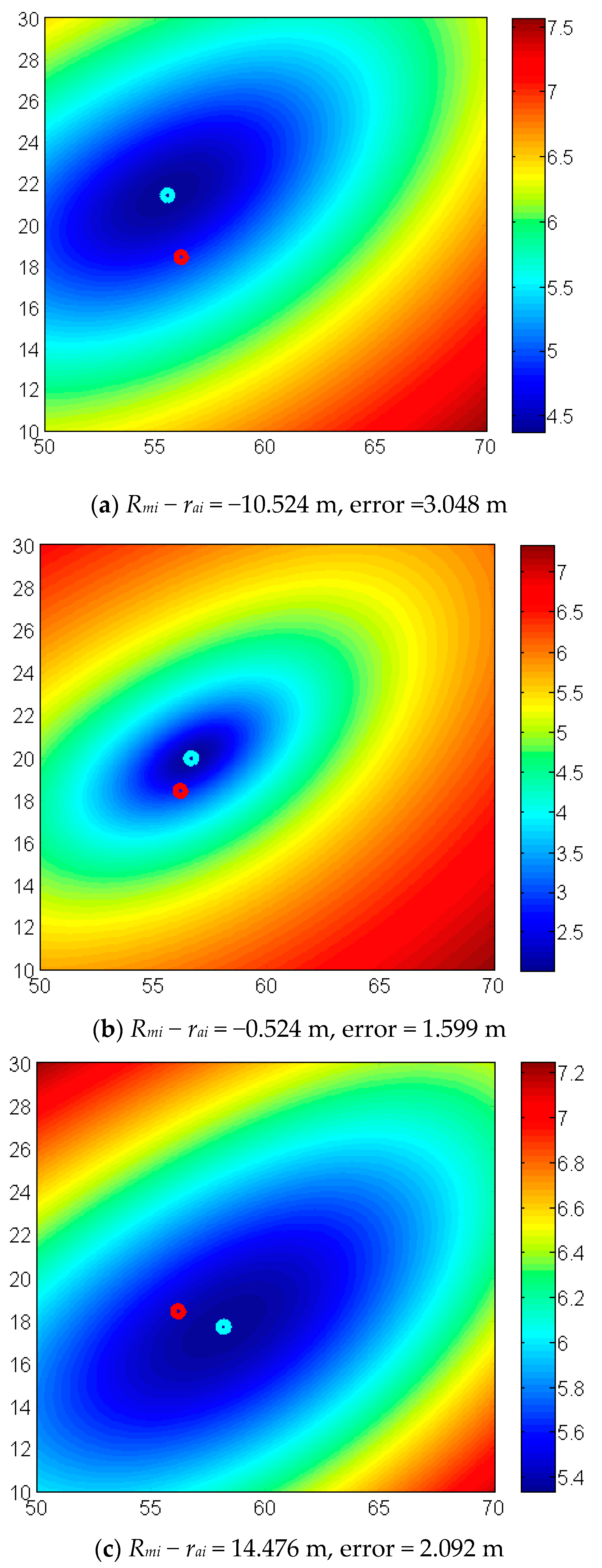
2.2. Self-Correcting Process
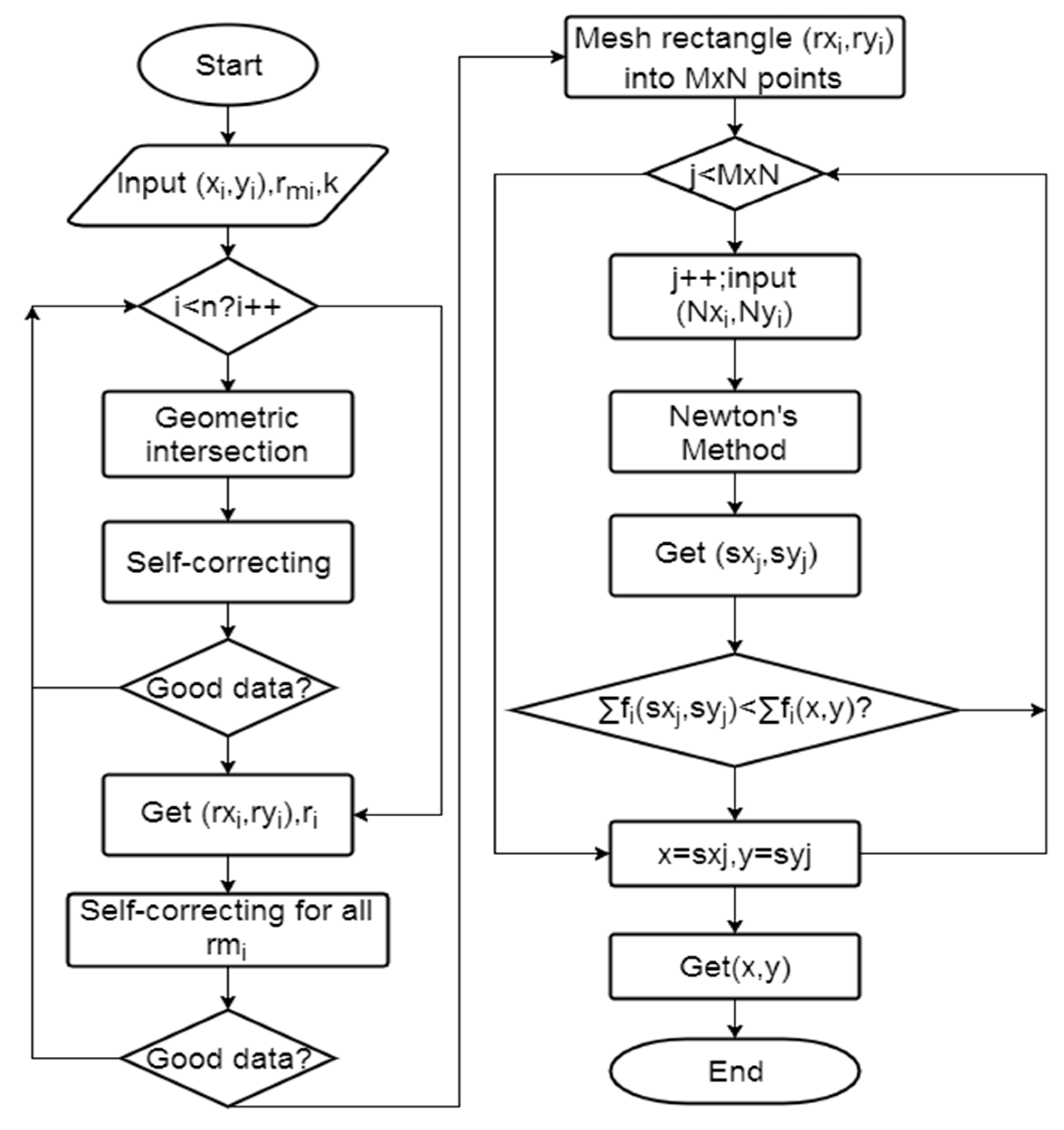
2.3. The Complete Algorithm
- Step 1:
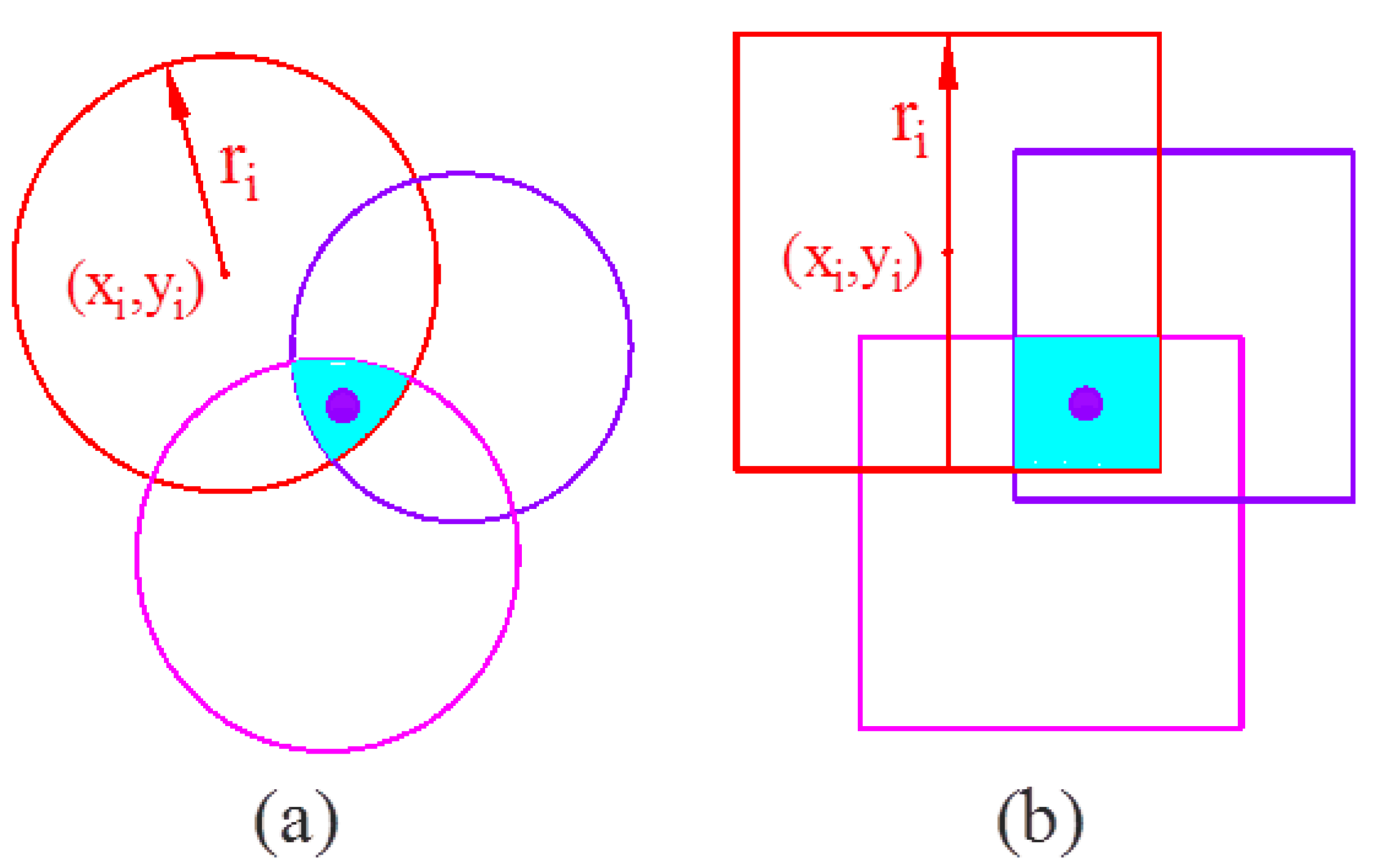
- Input the station coordinates (xi, yi) and distance rmi, k.
- Step 2:
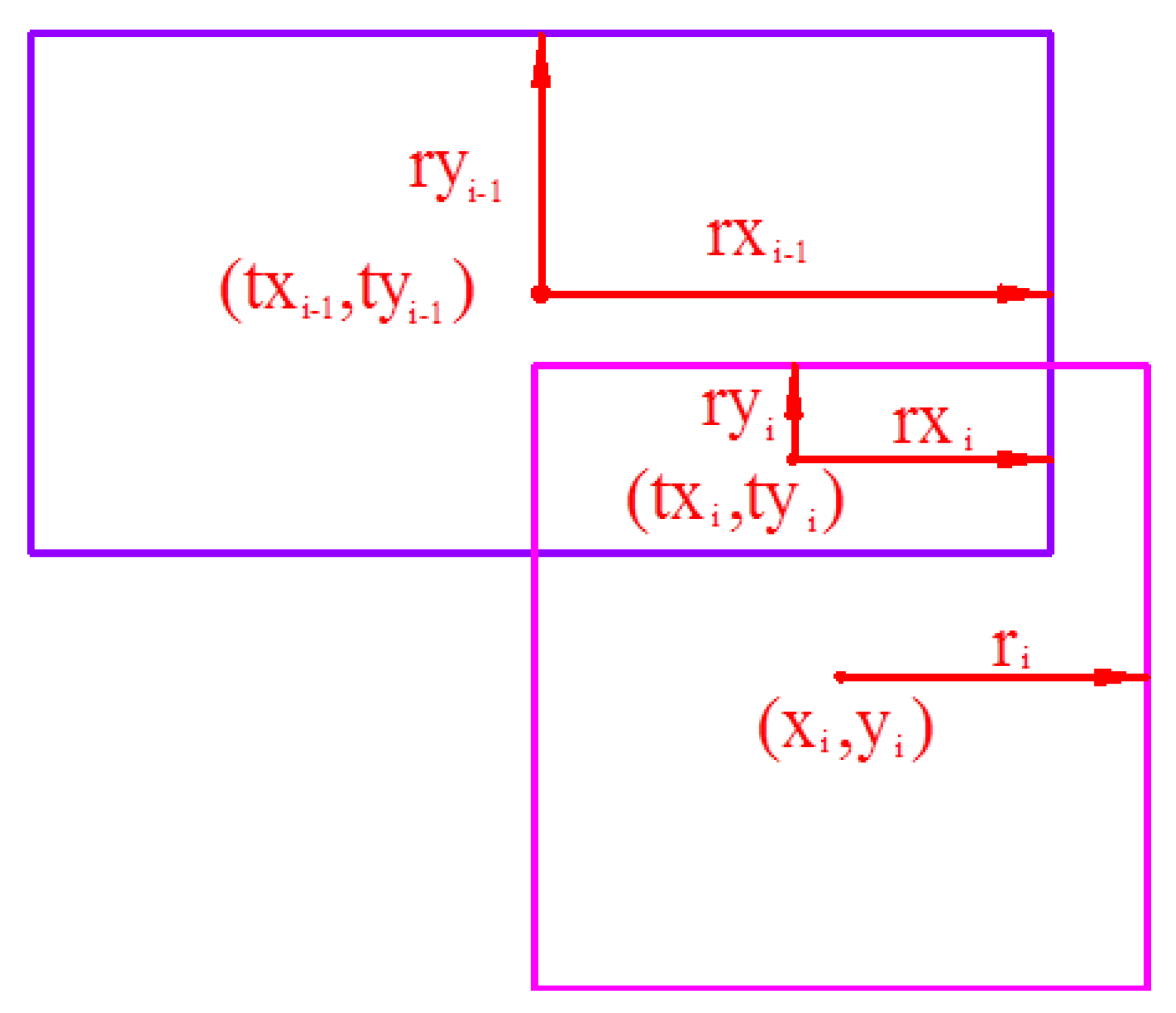
- Perform the geometric intersection algorithm based on Equations (8)–(12). Each iteration of algorithm will generate a new intersection region. The new region will intersect with the measurement square until all the stations are exhausted.
- Step 3:
- Using the self-correcting process to determine whether the current measurement is a low-quality measurement. If it is a low-quality measurement, then remove this data and go back to step 1.
- Step 4:
- When the target search domain obtained, do the self-correcting process again to check whether any low-quality measurement still exists. Those low-quality measurements should be removed and the geometric intersection restarted until no measurement is considered as low-quality measurement.
- Step 5:
- Mesh the intersection region into M × N points (usually M × N = 2n). Use the mesh grid coordinates as the initial guess of Newton’s Method.
- Step 6:
- Use Newton’s iterations to refine the potential unknown point (sxi, syi), which could be one of the local minimums.
- Step 7:
- Find the ‘global minimum’ by comparing Ʃfj(sxj, syj) and Ʃfj(x, y). If Ʃfj(sxj, syj) < Ʃfj(x, y), substitute x = sxi, y = syi.
- Step 8:
- Repeat step 7 for all the mesh grid points.
- Step 9:
- Get the minimum Ʃf(x, y), and (x, y) is the solution.
3. Results and Discussion
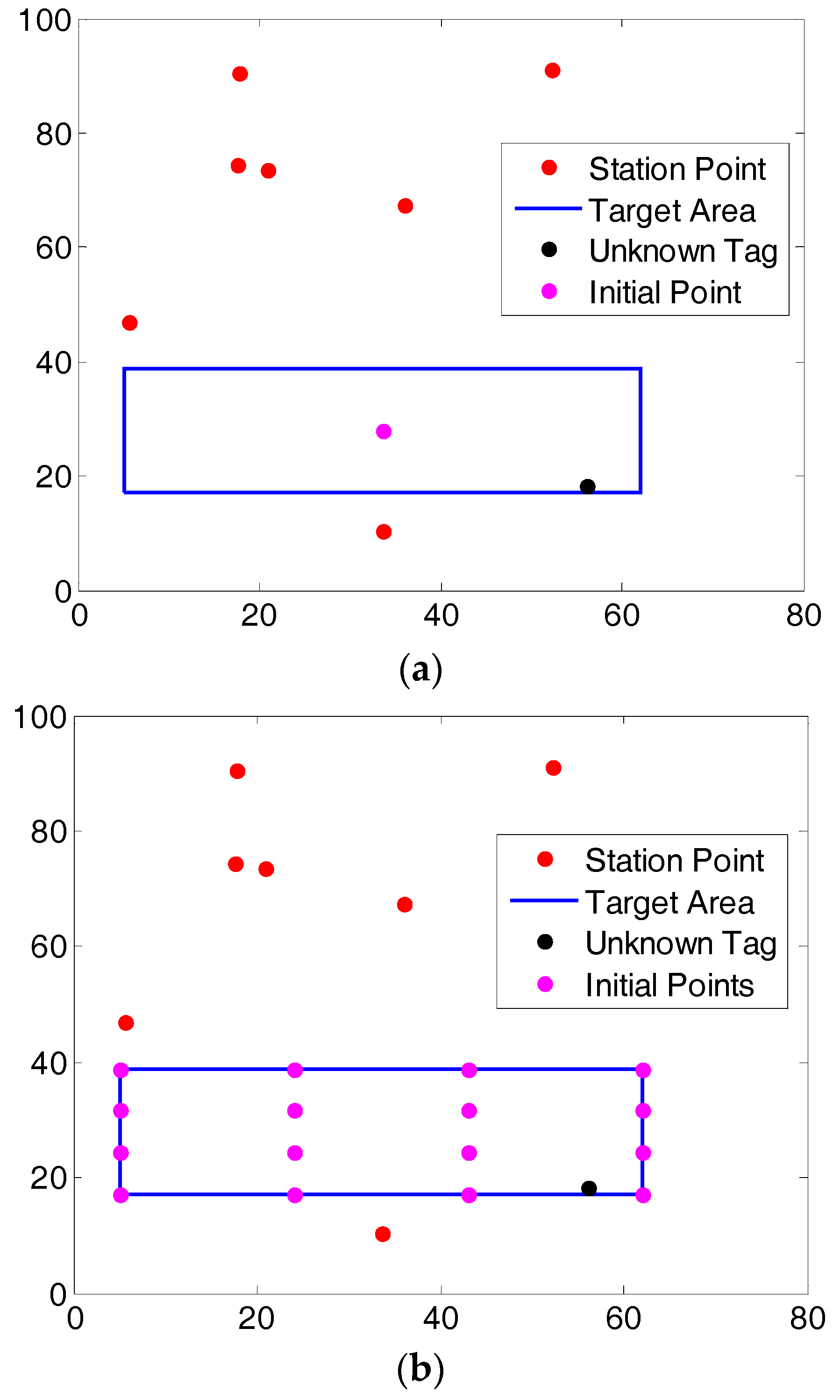
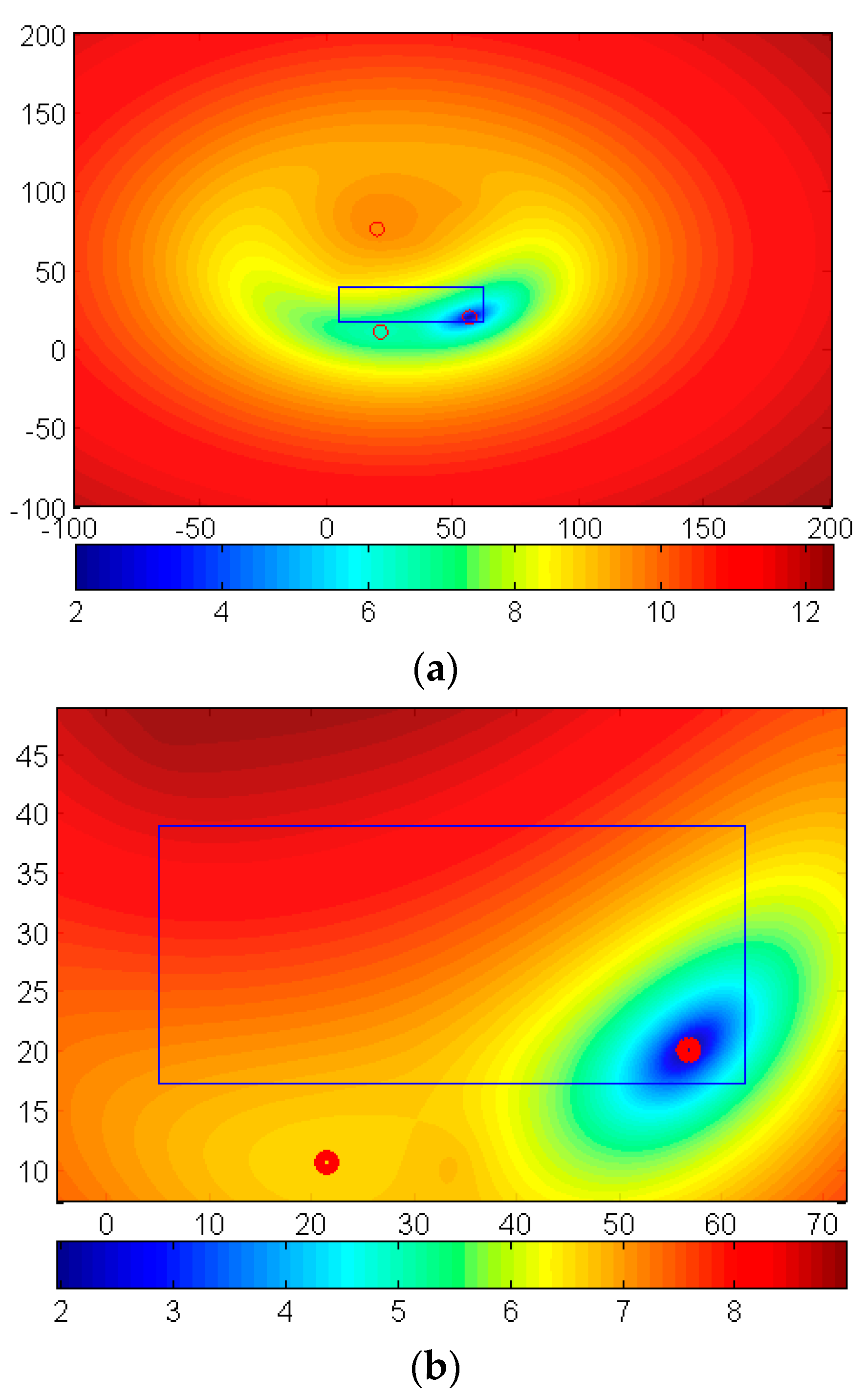
3.1. A Numerical Example
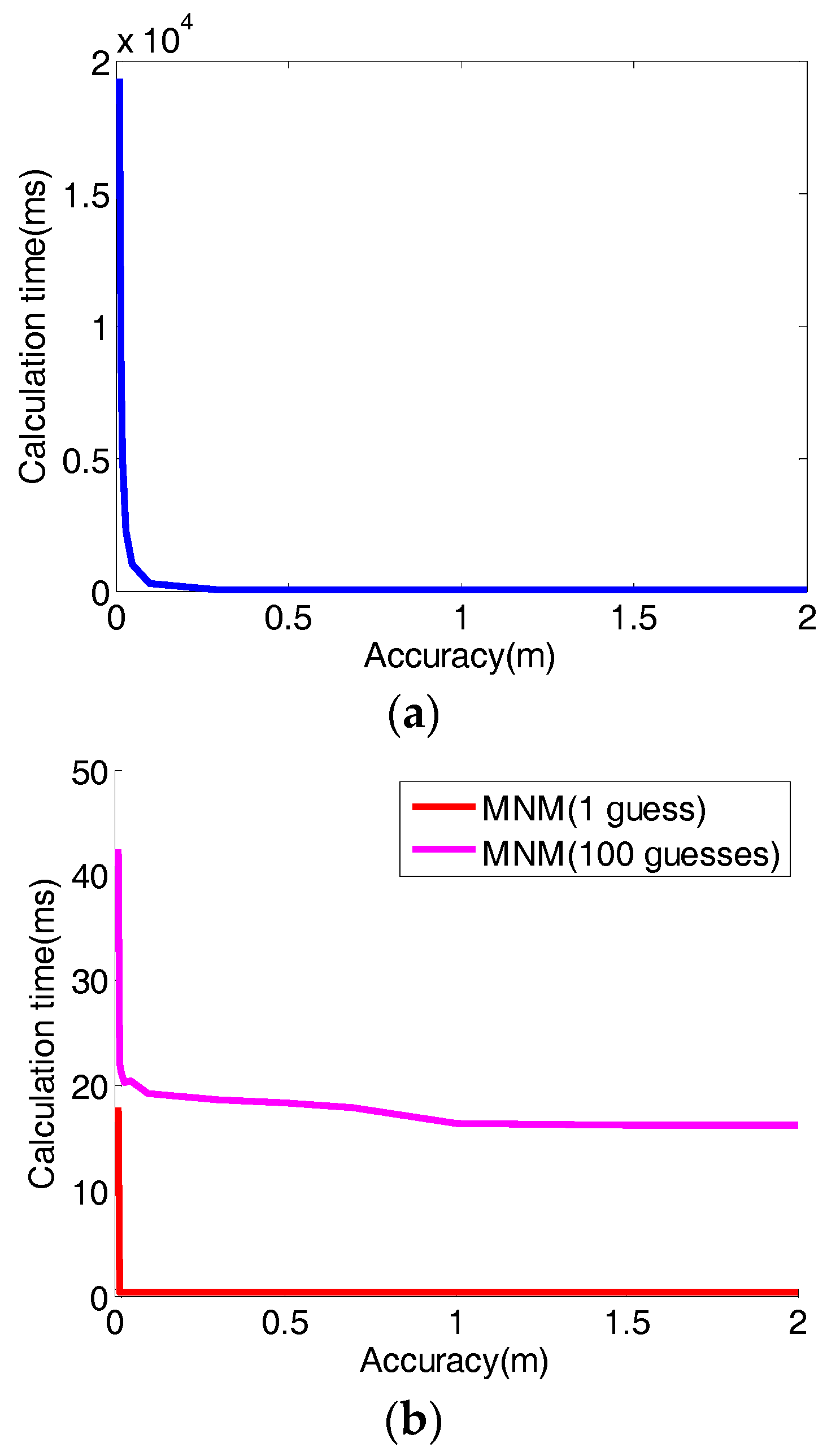
3.2. Comparison of Calculation Time between Direct Search Method and Modified Newton’s Method
3.3. Effect of Low-Quality Data
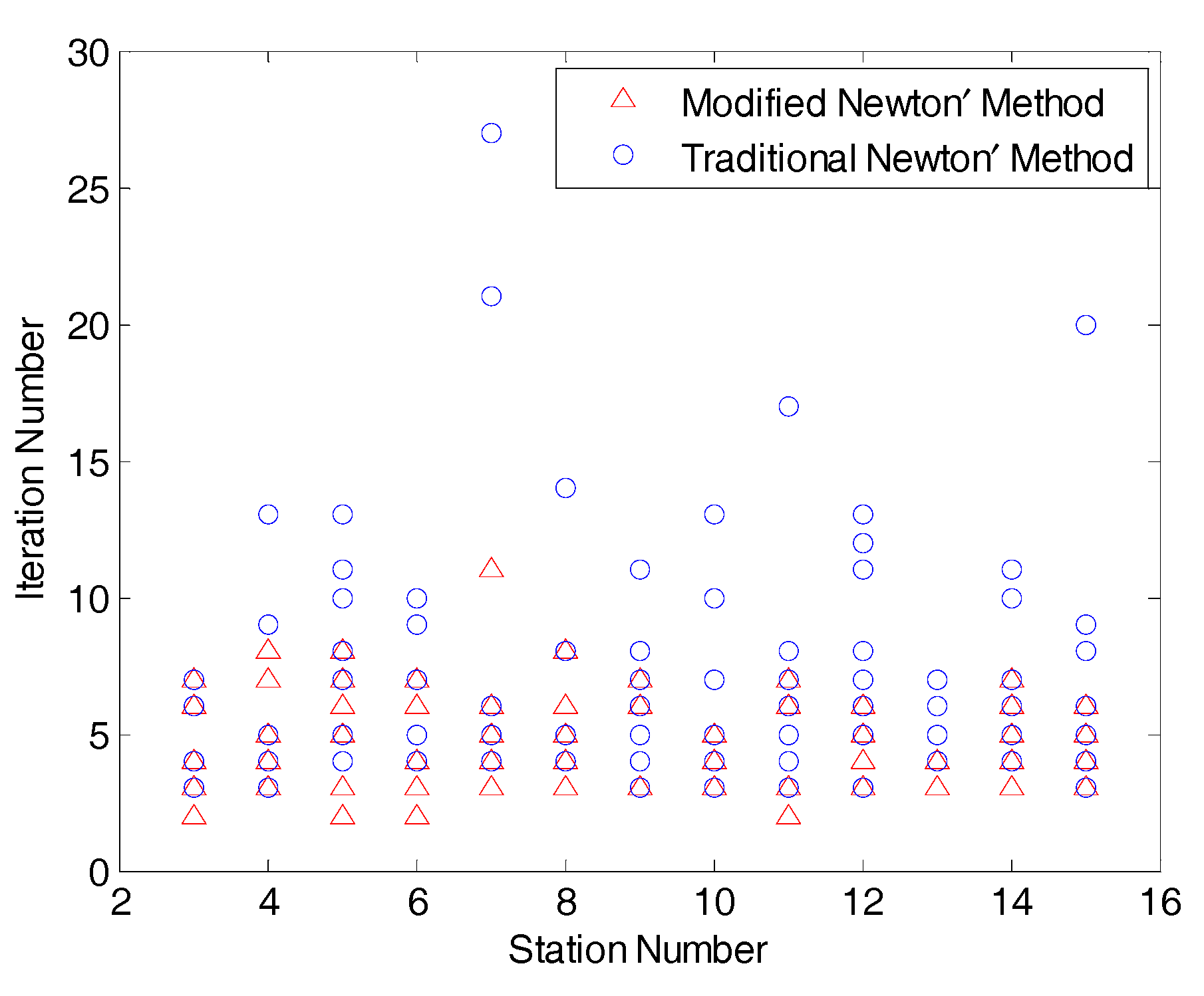
3.4. Comparison of Modified Newton’s Method and traditional Newton’s Method
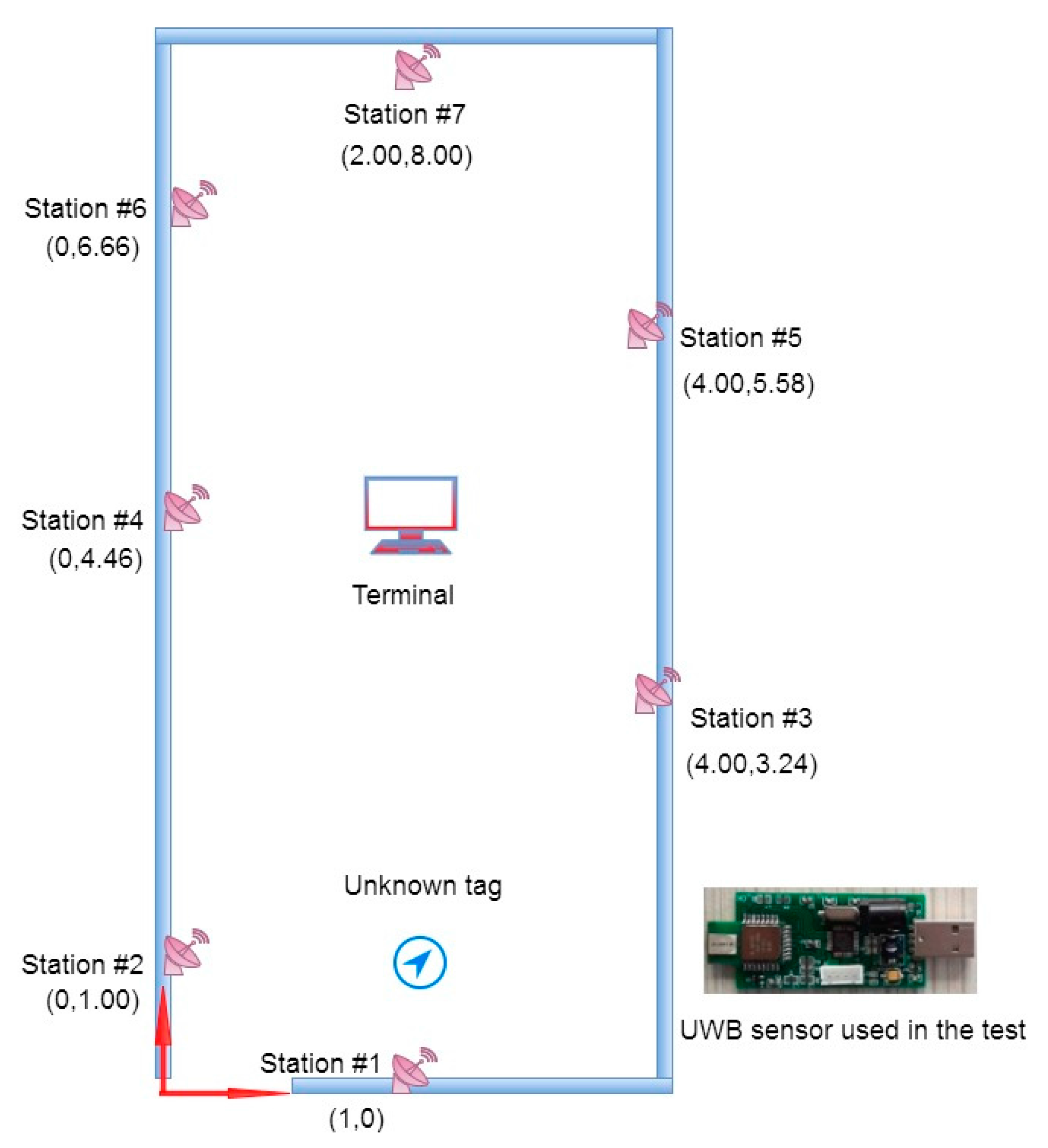
3.5. An Indoor Localization Experiment
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
References
- Thrun, S.; Fox, D.; Burgard, W.; Dellaert, F. Robust Monte Carlo localization for mobile robots. Artif. Intell. 2001, 128, 99–141. [Google Scholar] [CrossRef]
- Grimson, W.E.L.; Lozano-Perez, T. Model-based recognition and localization from sparse range or tactile data. Int. J. Robot. Res. 1984, 3, 3–35. [Google Scholar] [CrossRef]
- Drawil, N.M.; Amar, H.M.; Basir, O.A. GPS localization accuracy classification: A context-based approach. IEEE Trans. Intell. Trans. Syst. 2013, 14, 262–273. [Google Scholar] [CrossRef]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybern. Part C 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Corso, N.; Zakhor, A. Indoor localization algorithms for an ambulatory human operated 3D mobile mapping system. Remote Sens. 2013, 5, 6611–6646. [Google Scholar] [CrossRef]
- Qian, C.; Liu, H.; Tang, J.; Chen, Y.; Kaartinen, H.; Kukko, A.; Zhu, L.; Liang, X.; Chen, L.; Hyyppä, J. An integrated GNSS/INS/LIDAR-SLAM positioning method for highly accurate forest stem mapping. Remote Sens. 2016, 9, 3. [Google Scholar] [CrossRef]
- Wu, J.; Xu, Y.; Zhong, X.; Sun, Z.; Yang, J. A three-dimensional localization method for multistatic SAR based on numerical range-doppler algorithm and entropy minimization. Remote Sens. 2017, 9, 470. [Google Scholar] [CrossRef]
- Soldovieri, F.; Lopera, O.; Lambot, S. Combination of advanced inversion techniques for an accurate target localization via GPR for demining applications. IEEE Trans. Geosci. Remote Sens. 2011, 49, 451–461. [Google Scholar] [CrossRef]
- Bulusu, N.; Heidemann, J.; Estrin, D. GPS-less low-cost outdoor localization for very small devices. IEEE Pers. Commun. 2000, 7, 28–34. [Google Scholar] [CrossRef]
- Schipperijn, J.; Kerr, J.; Duncan, S.; Madsen, T.; Klinker, C.D.; Troelsen, J. Dynamic accuracy of GPS receivers for use in health research: A novel method to assess GPS accuracy in real-world settings. Emerg. Technol. Promot. Eval. Phys. Act. 2014, 23, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Biswas, J.; Veloso, M.M. Wifi localization and navigation for autonomous indoor mobile robots. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation (ICRA), Anchorage, AK, USA, 3–7 May 2010. [Google Scholar]
- Youssef, M.A.; Agrawala, A.; Shankar, A.U. Wlan location determination via clustering and probability distributions. In Proceedings of the First IEEE International Conference on Pervasive Computing and Communications, Fort Worth, TX, USA, 26 March 2003; pp. 143–150. [Google Scholar]
- Altini, M.; Brunelli, D.; Farella, E.; Benini, L. Bluetooth indoor localization with multiple neural networks. In Proceedings of the 2010 5th IEEE International Symposium on Wireless Pervasive Computing (ISWPC), Modena, Italy, 5–7 May 2010; pp. 295–300. [Google Scholar]
- Raghavan, A.N.; Ananthapadmanaban, H.; Sivamurugan, M.S.; Ravindran, B. Accurate mobile robot localization in indoor environments using bluetooth. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation (ICRA), Anchorage, AK, USA, 3–7 May 2010; pp. 4391–4396. [Google Scholar]
- Huircán, J.I.; Muñoz, C.; Young, H.; Von Dossow, L.; Bustos, J.; Vivallo, G.; Toneatti, M. ZigBee-based wireless sensor network localization for cattle monitoring in grazing fields. Comput. Electron. Agric. 2010, 74, 258–264. [Google Scholar] [CrossRef]
- Cheon, J.; Hwang, H.; Kim, D.; Jung, Y. IEEE 802.15. 4 ZigBee-based time-of-arrival estimation for wireless sensor networks. Sensors 2016, 16, 203. [Google Scholar] [CrossRef] [PubMed]
- Medina, C.; Segura, J.C.; De la Torre, A. Ultrasound indoor positioning system based on a low-power wireless sensor network providing sub-centimeter accuracy. Sensors 2013, 13, 3501–3526. [Google Scholar] [CrossRef] [PubMed]
- Varshavsky, A.; De Lara, E.; Hightower, J.; LaMarca, A.; Otsason, V. GSM indoor localization. Pervasive Mob. Comput. 2007, 3, 698–720. [Google Scholar] [CrossRef]
- Cong, L.; Zhuang, W. Hybrid TDOA/AOA mobile user location for wideband cdma cellular systems. IEEE Trans. Wirel. Commun. 2002, 1, 439–447. [Google Scholar] [CrossRef]
- Yang, H.; Zhang, R.; Bordoy, J.; Höflinger, F.; Li, W.; Schindelhauer, C.; Reindl, L. Smartphone-based indoor localization system using inertial sensor and acoustic transmitter/receiver. IEEE Sens. J. 2016, 16, 8051–8061. [Google Scholar] [CrossRef]
- Jourdan, D.B.; Dardari, D.; Win, M.Z. Position error bound for uwb localization in dense cluttered environments. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 613–628. [Google Scholar] [CrossRef]
- Lee, J.-Y.; Scholtz, R.A. Ranging in a dense multipath environment using an UWB radio link. Sel. Areas Commun. IEEE J. 2002, 20, 1677–1683. [Google Scholar]
- Masiero, A.; Fissore, F.; Vettore, A. A low cost UWB based solution for direct georeferencing UAV photogrammetry. Remote Sens. 2017, 9, 414. [Google Scholar] [CrossRef]
- Chóliz, J.; Hernández, Á.; Valdovinos, A. A framework for UWB-based communication and location tracking systems for wireless sensor networks. Sensors 2011, 11, 9045–9068. [Google Scholar] [CrossRef] [PubMed]
- Dardari, D.; Conti, A.; Ferner, U.; Giorgetti, A.; Win, M.Z. Ranging with ultrawide bandwidth signals in multipath environments. Proc. IEEE 2009, 97, 404–426. [Google Scholar] [CrossRef]
- Jachimczyk, B.; Dziak, D.; Kulesza, W.J. Customization of UWB 3D-RTLS based on the new uncertainty model of the AoA ranging technique. Sensors 2017, 17, 227. [Google Scholar] [CrossRef] [PubMed]
- Patwari, N.; Hero, A.O., III. Using proximity and quantized RSS for sensor localization in wireless networks. In Proceedings of the 2nd ACM International Conference on Wireless Sensor Networks and Applications, San Diego, CA, USA, 19 September 2003; pp. 20–29. [Google Scholar]
- Foy, W.H. Position-location solutions by Taylor-series estimation. IEEE Trans. Aerosp. Electron. Syst. 1976, AES-12, 187–194. [Google Scholar] [CrossRef]
- Nguyen, T.L.; Shin, Y. Matrix completion optimization for localization in wireless sensor networks for intelligent IoT. Sensors 2016, 16, 722. [Google Scholar] [CrossRef] [PubMed]
- Leugner, S.; Pelka, M.; Hellbrück, H. Comparison of wired and wireless synchronization with clock drift compensation suited for U-TDoA localization. In Proceedings of the 2016 13th Workshop on Positioning, Navigation and Communications (WPNC), Bremen, Germany, 19–20 October 2016; pp. 1–4. [Google Scholar]
- Low, Z.; Cheong, J.; Law, C. Low-cost PCB antenna for UWB applications. IEEE Antennas Wirel. Propag. Lett. 2005, 4, 237–239. [Google Scholar] [CrossRef]
- Choi, S.H.; Park, J.K.; Kim, S.K.; Park, J.Y. A new ultra-wideband antenna for UWB applications. Microw. Opt. Technol. Lett. 2004, 40, 399–401. [Google Scholar] [CrossRef]
- Win, M.Z.; Scholtz, R.A. On the robustness of ultra-wide bandwidth signals in dense multipath environments. IEEE Commun. Lett. 1998, 2, 51–53. [Google Scholar] [CrossRef]
- Win, M.Z.; Scholtz, R.A. Characterization of ultra-wide bandwidth wireless indoor channels: A communication-theoretic view. IEEE J. Sel. Areas Commun. 2002, 20, 1613–1627. [Google Scholar] [CrossRef]
- Peyraud, S.; Bétaille, D.; Renault, S.; Ortiz, M.; Mougel, F.; Meizel, D.; Peyret, F. About non-line-of-sight satellite detection and exclusion in a 3D map-aided localization algorithm. Sensors 2013, 13, 829–847. [Google Scholar] [CrossRef] [PubMed]
- Müller, C.A.; Delande, D. Disorder and interference: Localization phenomena. arXiv, 2010; arXiv:1005.0915. [Google Scholar]
- Chan, Y.T.; Ho, K.C. A simple and efficient estimator for hyperbolic location. IEEE Trans. Signal Proc. 1994, 42, 1905–1915. [Google Scholar] [CrossRef]
- Kelley, C.T. Solving Nonlinear Equations with Newton’s Method; SIAM: Philadelphia, PA, USA, 2003. [Google Scholar]
- Yang, L.; Cao, J.; Yang, W. TDOA location based on modified newton method. In Proceedings of the 2016 IEEE 13th International Conference on Signal Processing (ICSP), Chengdu, China, 6–10 November 2016; pp. 1515–1518. [Google Scholar]
- Cota-Ruiz, J.; Rosiles, J.-G.; Rivas-Perea, P.; Sifuentes, E. A distributed localization algorithm for wireless sensor networks based on the solutions of spatially-constrained local problems. IEEE Sens. J. 2013, 13, 2181–2191. [Google Scholar] [CrossRef]
- Duff, I.S.; Erisman, A.M.; Reid, J.K. Direct Methods for Sparse Matrices; Oxford University Press: New York, NY, USA, 2017. [Google Scholar]
- Sasaki, T.; Murao, H. Efficient Gaussian elimination method for symbolic determinants and linear systems. ACM Trans. Math. Softw. 1982, 8, 277–289. [Google Scholar] [CrossRef]
- Misra, A.; Huang, S. Micromechanics based stress-displacement relationships of rough contacts: Numerical implementation under combined normal and shear loading. Comput. Model. Eng. Sci 2009, 52, 197–215. [Google Scholar]
- Huber, P.J. Robust Statistics; Springer: Hoboken, NY, USA, 2011. [Google Scholar]
- Lee, S.; Kim, E.; Kim, C.; Kim, K. Localization with a mobile beacon based on geometric constraints in wireless sensor networks. IEEE Trans. Wirel. Commun. 2009, 8, 5801–5805. [Google Scholar] [CrossRef]
- Cota-Ruiz, J.; Rosiles, J.-G.; Sifuentes, E.; Rivas-Perea, P. A low-complexity geometric bilateration method for localization in wireless sensor networks and its comparison with least-squares methods. Sensors 2012, 12, 839–862. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Hua, B.; Shang, Y.; Xiong, Y. A robust localization algorithm in wireless sensor networks. Front. Comput. Sci. China 2008, 2, 438–450. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Station, n | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| Coordinate xi (m) | 17.812 | 35.963 | 5.670 | 52.189 | 33.585 | 17.567 | 20.895 |
| Coordinate yi (m) | 90.515 | 67.539 | 46.847 | 91.213 | 10.401 | 74.555 | 73.627 |
| measurement rmi (m) | 82.159 | 52.119 | 56.136 | 71.467 | 25.956 | 65.994 | 64.236 |
| measurement errors (m) | 0.486 | 1.000 | 1.829 | 1.437 | 1.975 | 2.143 | 1.288 |
| Accuracy (m) | 0.01 | 0.015 | 0.02 | 0.03 | 0.05 | 0.1 | 0.3 | 0.5 | 0.7 | 1 | 1.5 | 2 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DSM time | 19309 | 8570 | 4954 | 2274 | 975 | 282 | 26.04 | 8.96 | 4.20 | 2.05 | 0.93 | 0.56 |
| MNM time (initial guess = 1) | 17.96 | 0.44 | 0.42 | 0.41 | 0.40 | 0.40 | 0.39 | 0.37 | 0.36 | 0.39 | 0.36 | 0.32 |
| MNM (initial guesses = 100) | 42.47 | 22.02 | 21.14 | 20.32 | 20.47 | 19.26 | 18.61 | 25.33 | 17.88 | 16.32 | 16.29 | 16.26 |
| Station, n | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| Coordinate xi (m) | 2.00 | 0.00 | 4.00 | 0.00 | 4.00 | 0.00 | 2.00 |
| Coordinate yi (m) | 0.00 | 1.00 | 3.24 | 4.46 | 5.58 | 6.66 | 8.00 |
| Measurement rmi (m) | 1.22 | 2.12 | 3.25 | 4.36 | 5.39 | 7.01 | 7.62 |
| Actual distance (m) | 1.00 | 2.00 | 3.01 | 4.00 | 5.00 | 5.98 | 6.99 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, S.; Wu, Z.; Misra, A. A Practical, Robust and Fast Method for Location Localization in Range-Based Systems. Sensors 2017, 17, 2869. https://doi.org/10.3390/s17122869
Huang S, Wu Z, Misra A. A Practical, Robust and Fast Method for Location Localization in Range-Based Systems. Sensors. 2017; 17(12):2869. https://doi.org/10.3390/s17122869
Chicago/Turabian StyleHuang, Shiping, Zhifeng Wu, and Anil Misra. 2017. "A Practical, Robust and Fast Method for Location Localization in Range-Based Systems" Sensors 17, no. 12: 2869. https://doi.org/10.3390/s17122869
APA StyleHuang, S., Wu, Z., & Misra, A. (2017). A Practical, Robust and Fast Method for Location Localization in Range-Based Systems. Sensors, 17(12), 2869. https://doi.org/10.3390/s17122869