Estimating Stair Running Performance Using Inertial Sensors

 , , and
, , and 
Abstract
:1. Introduction
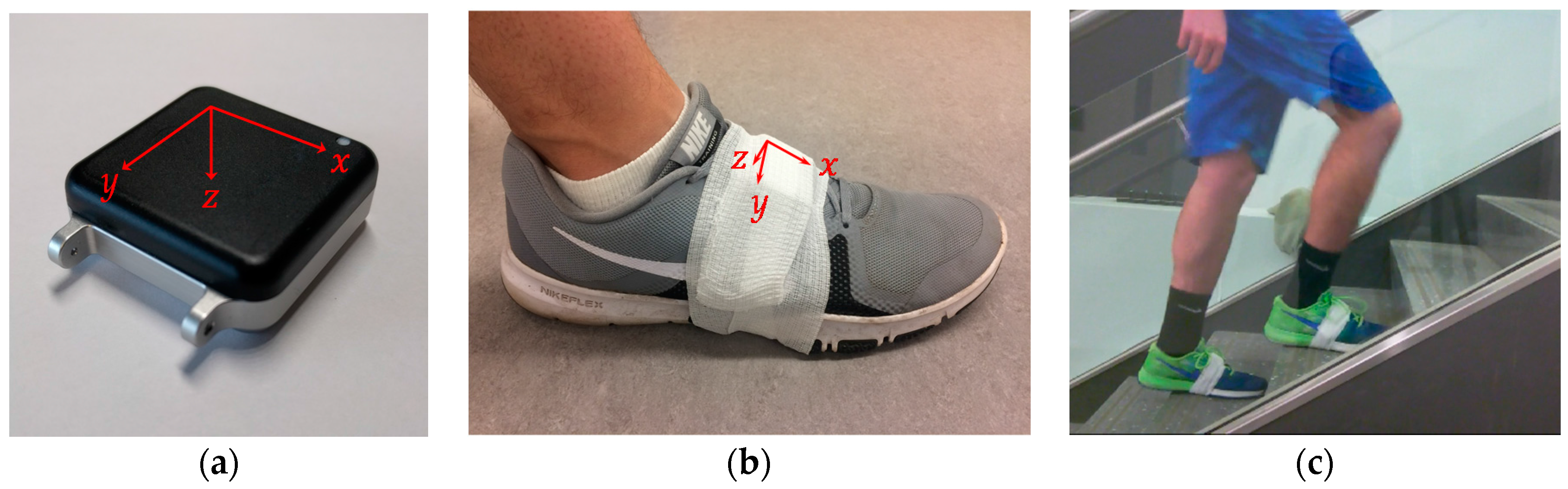
2. Materials and Methods
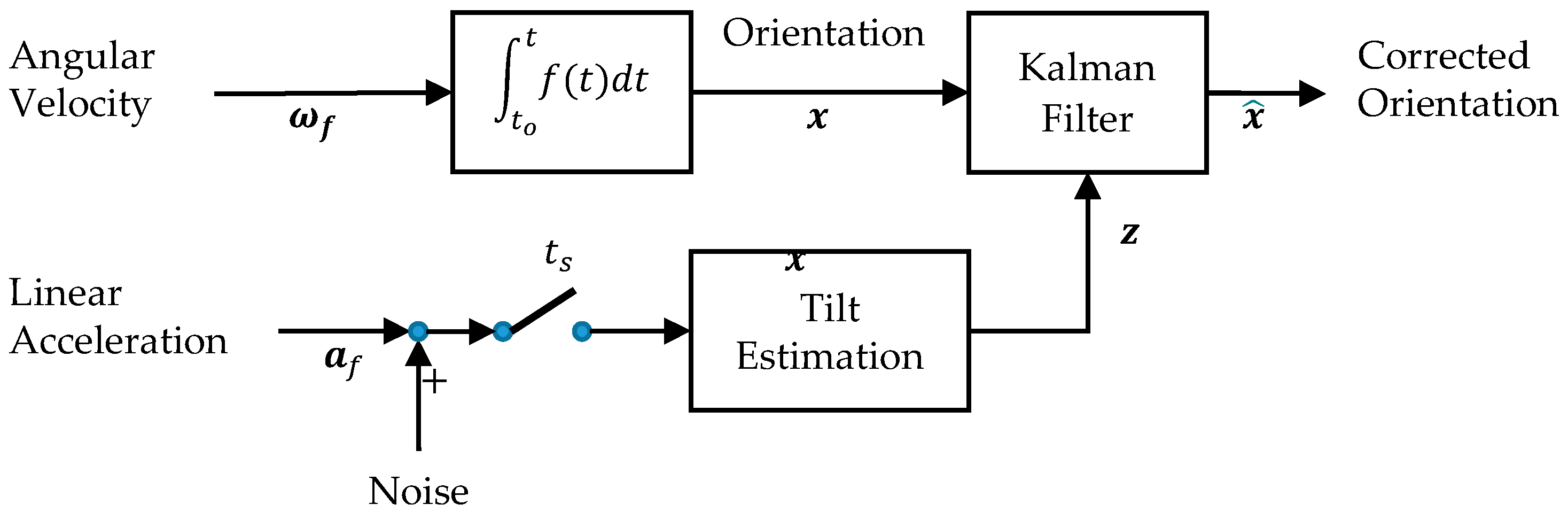
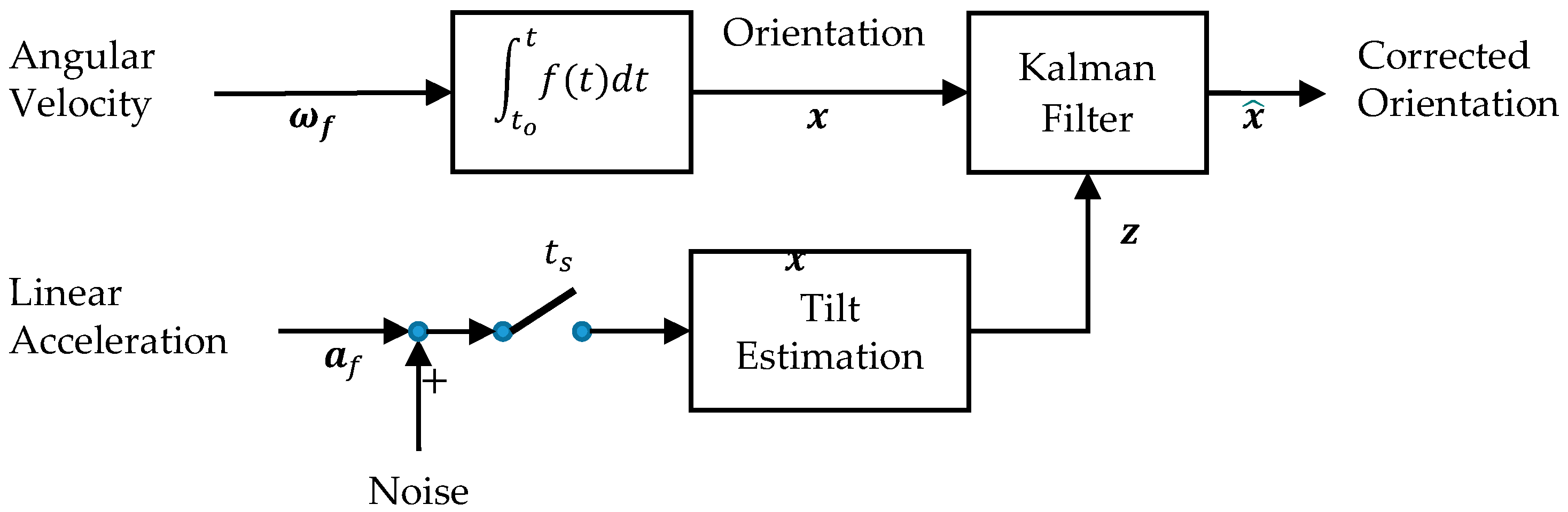
2.1. Orientation Estimation
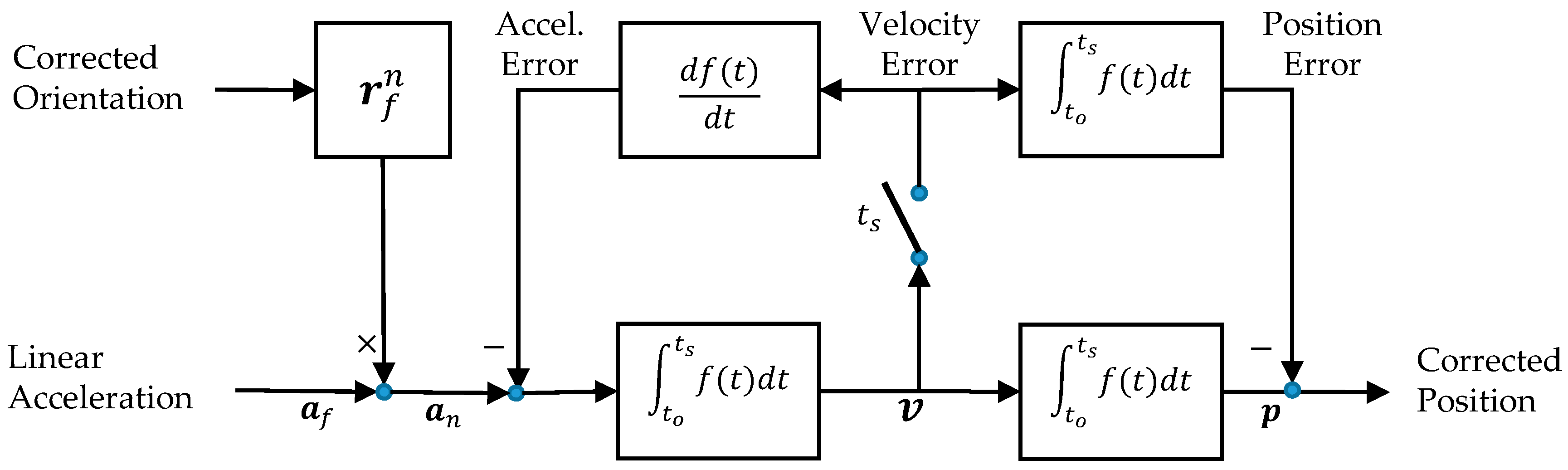
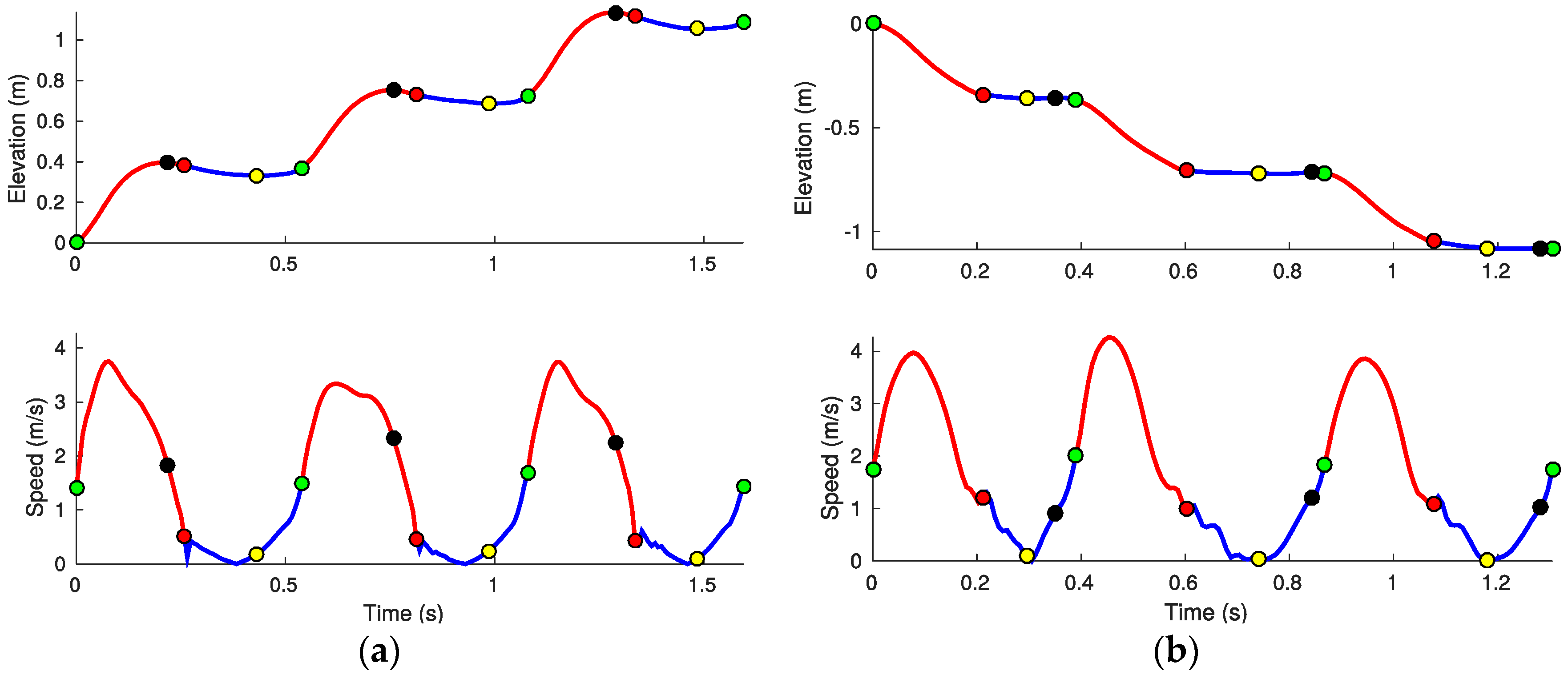
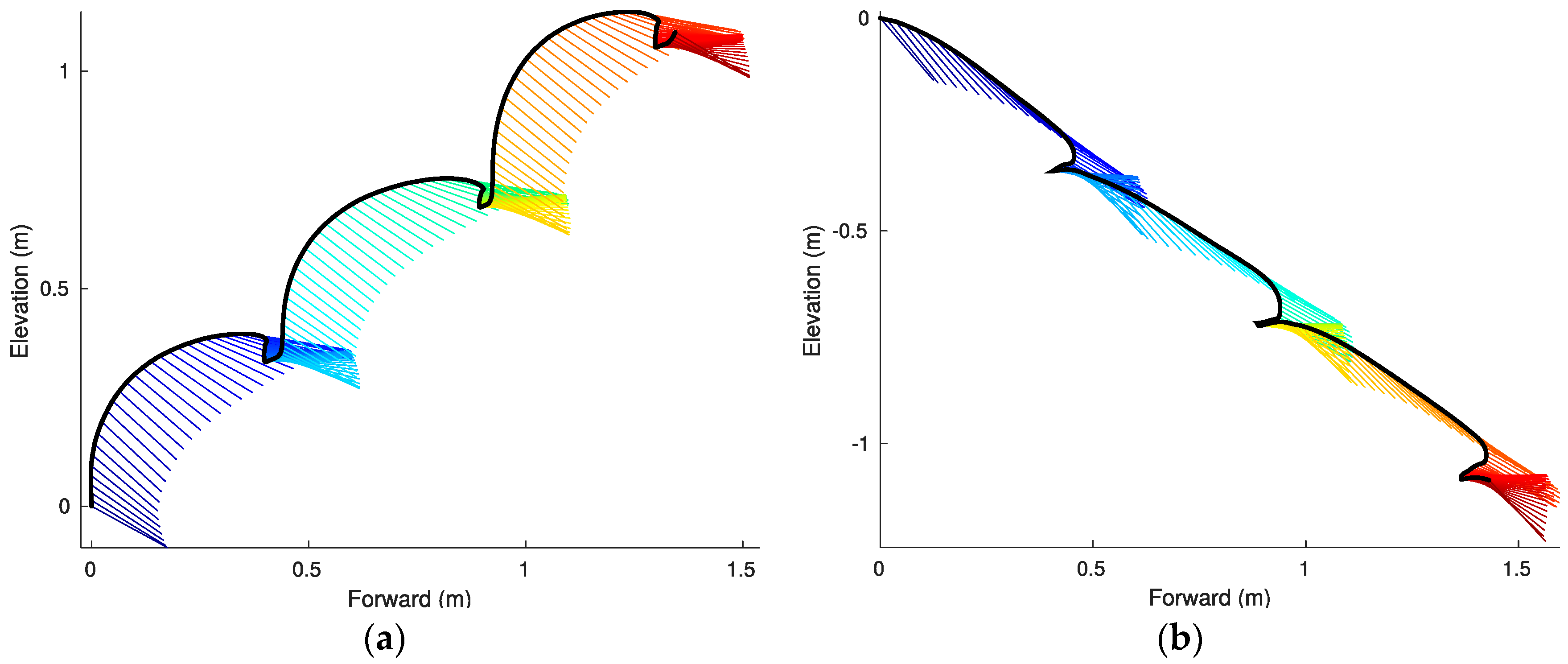
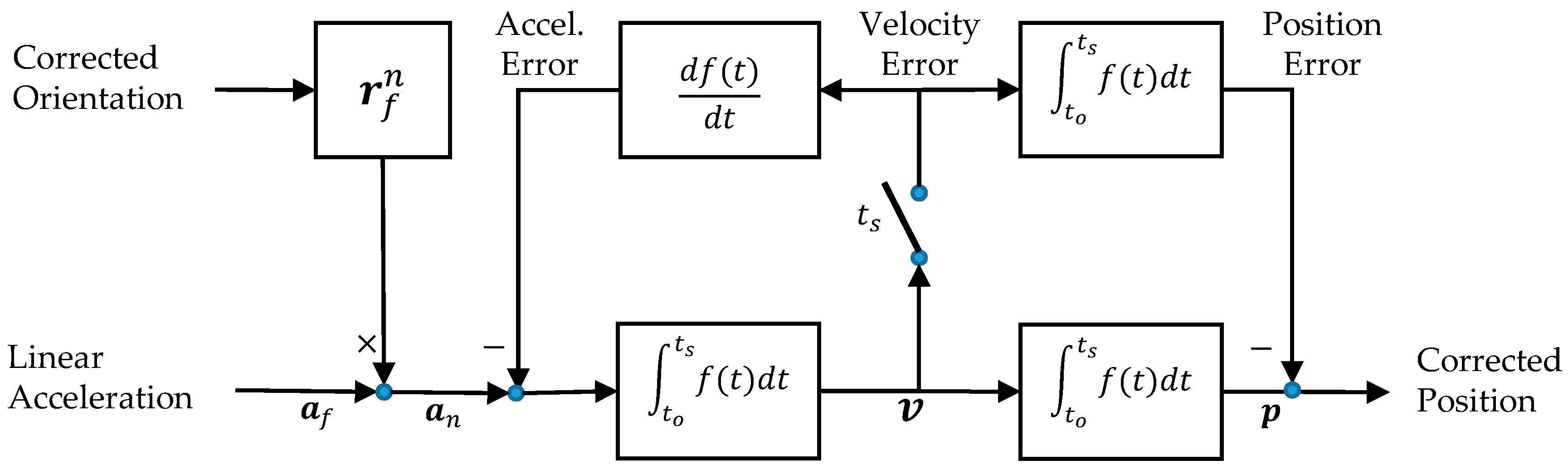
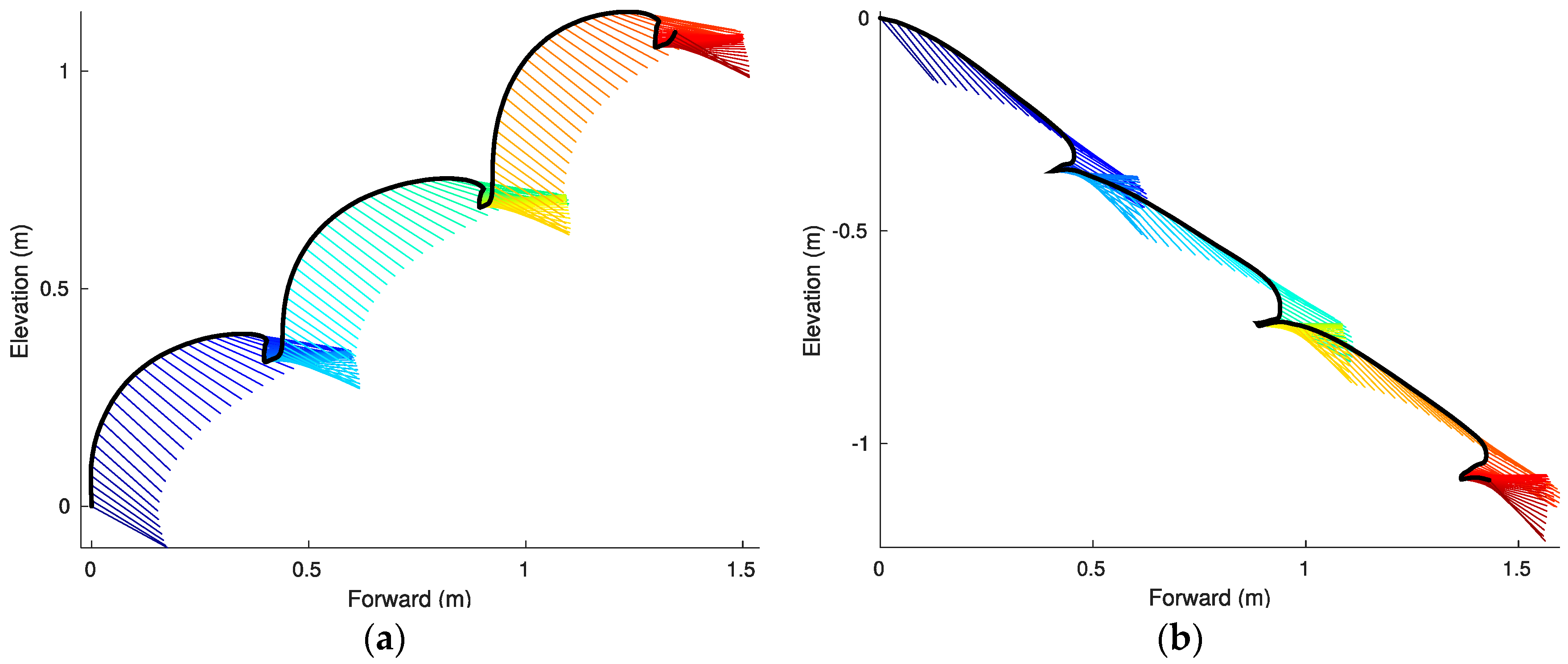
2.2. Foot Trajectory Estimation
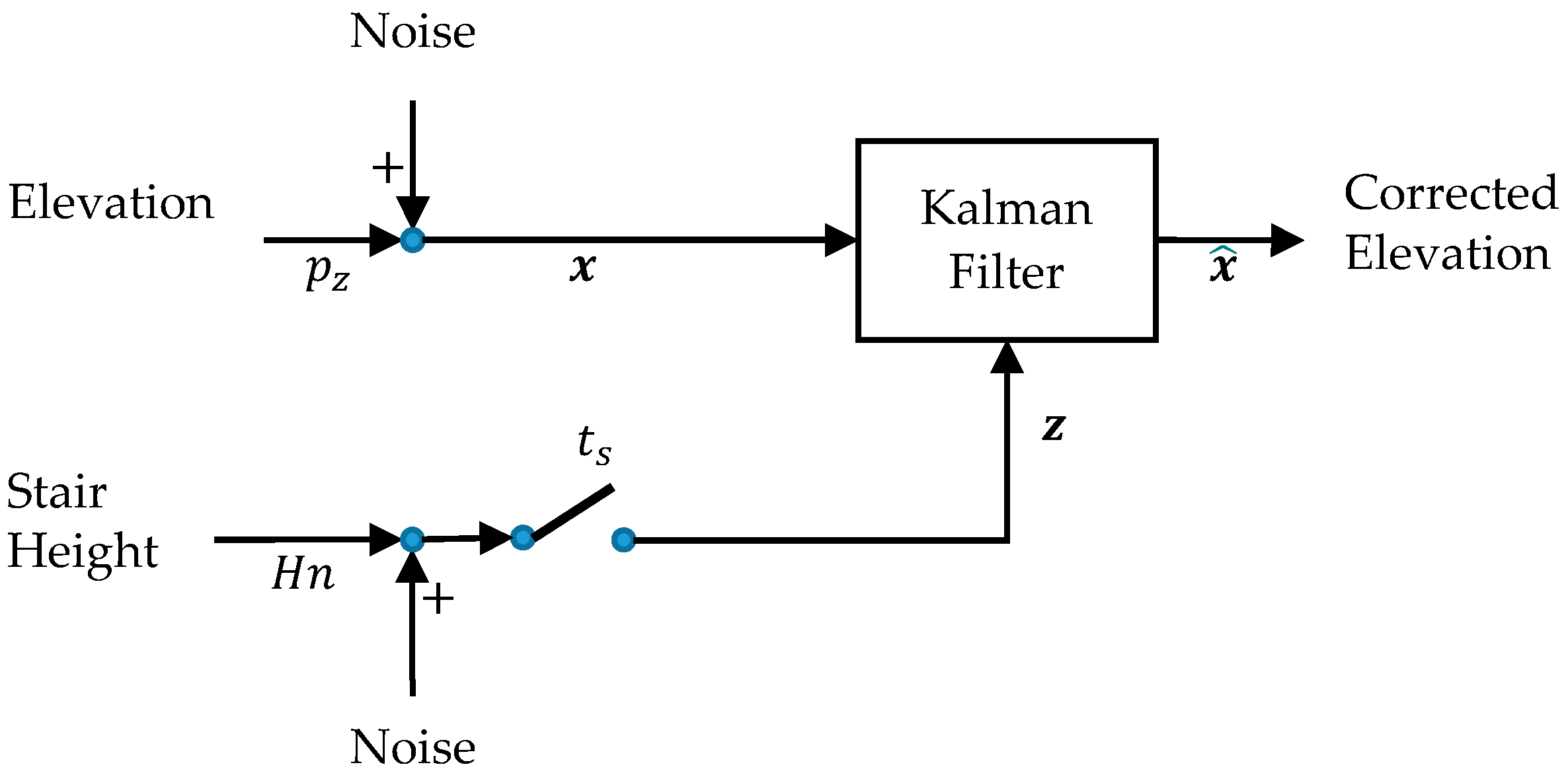
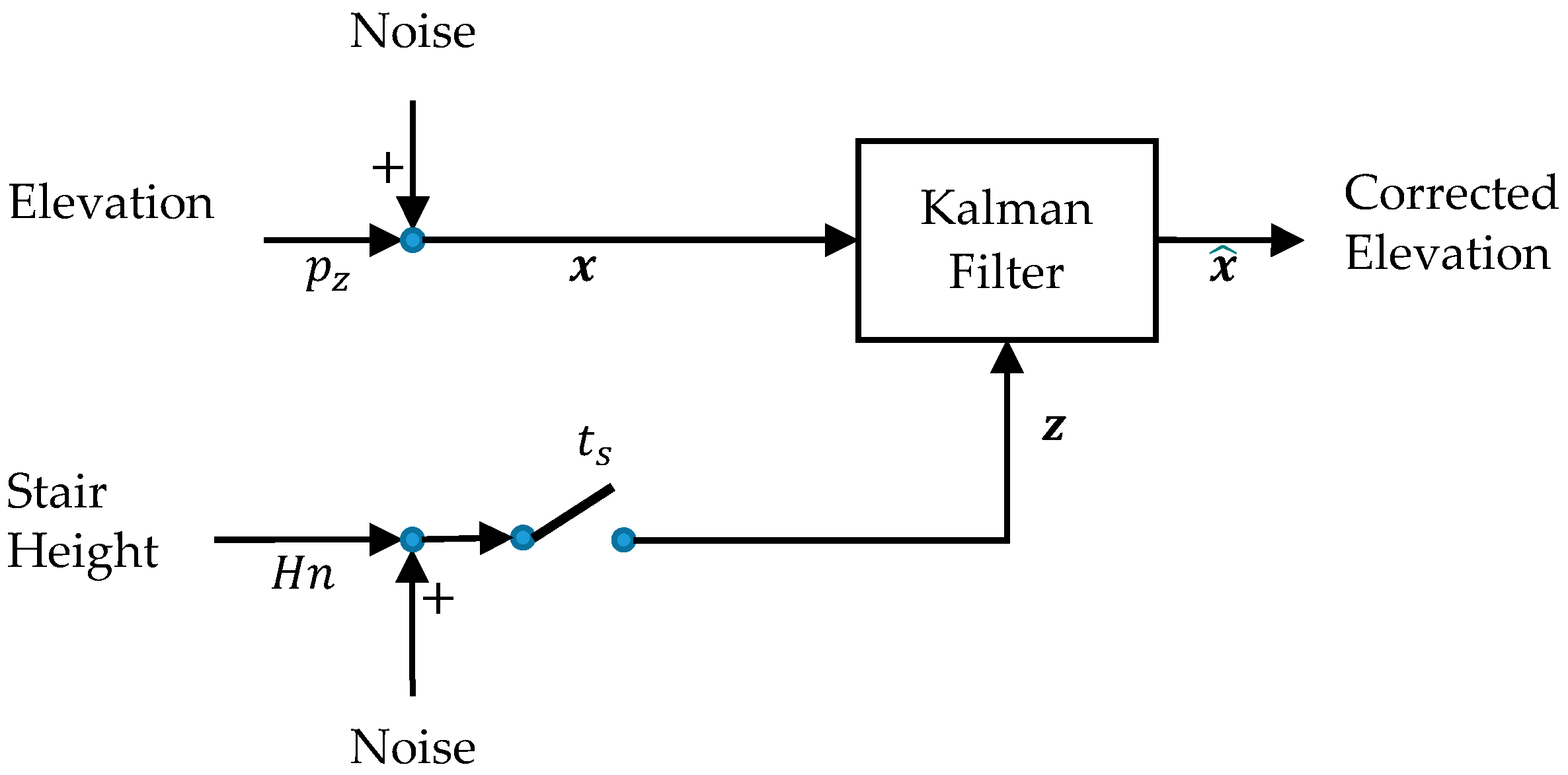
2.3. Elevation Correction
2.4. Gait Timing Variables
2.5. Gait Kinematic and Kinetic Variables
2.6. Statistical Analysis
3. Results and Discussion
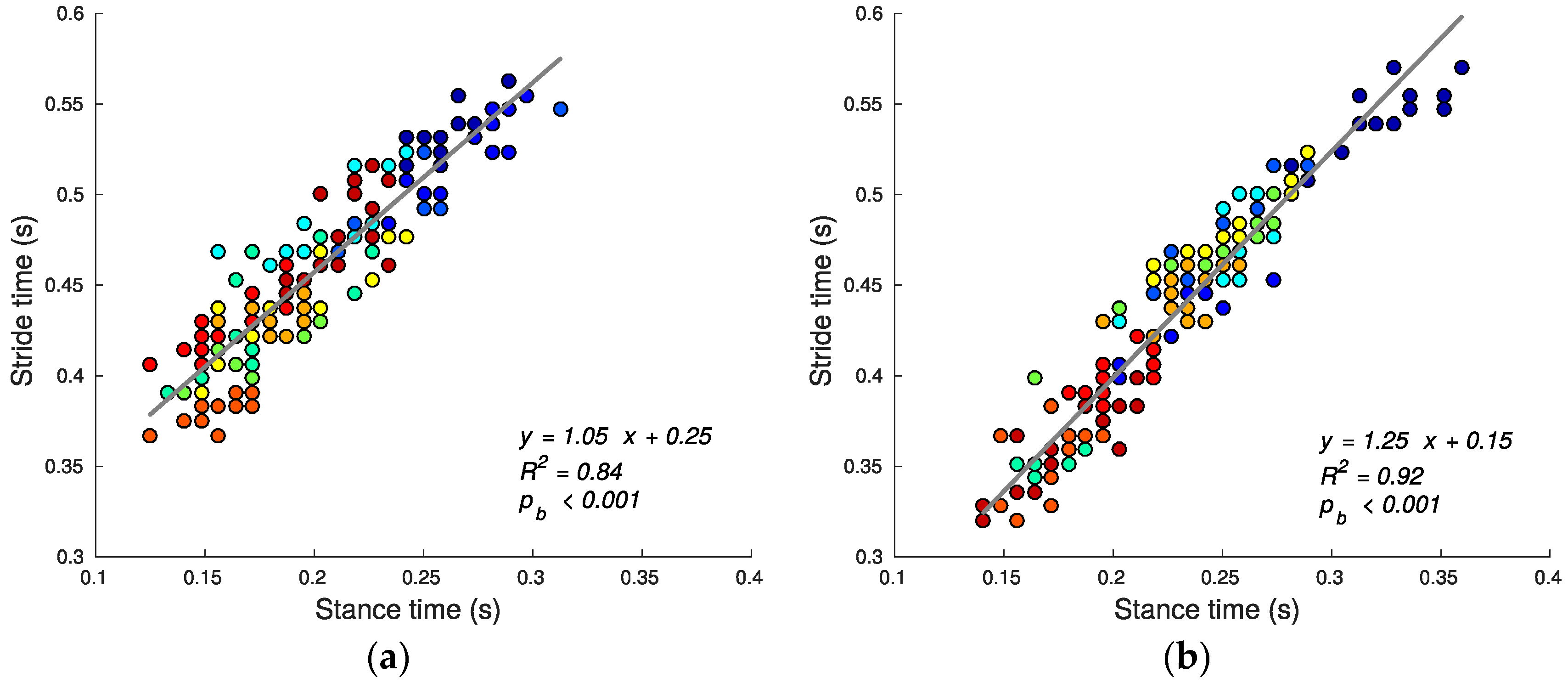
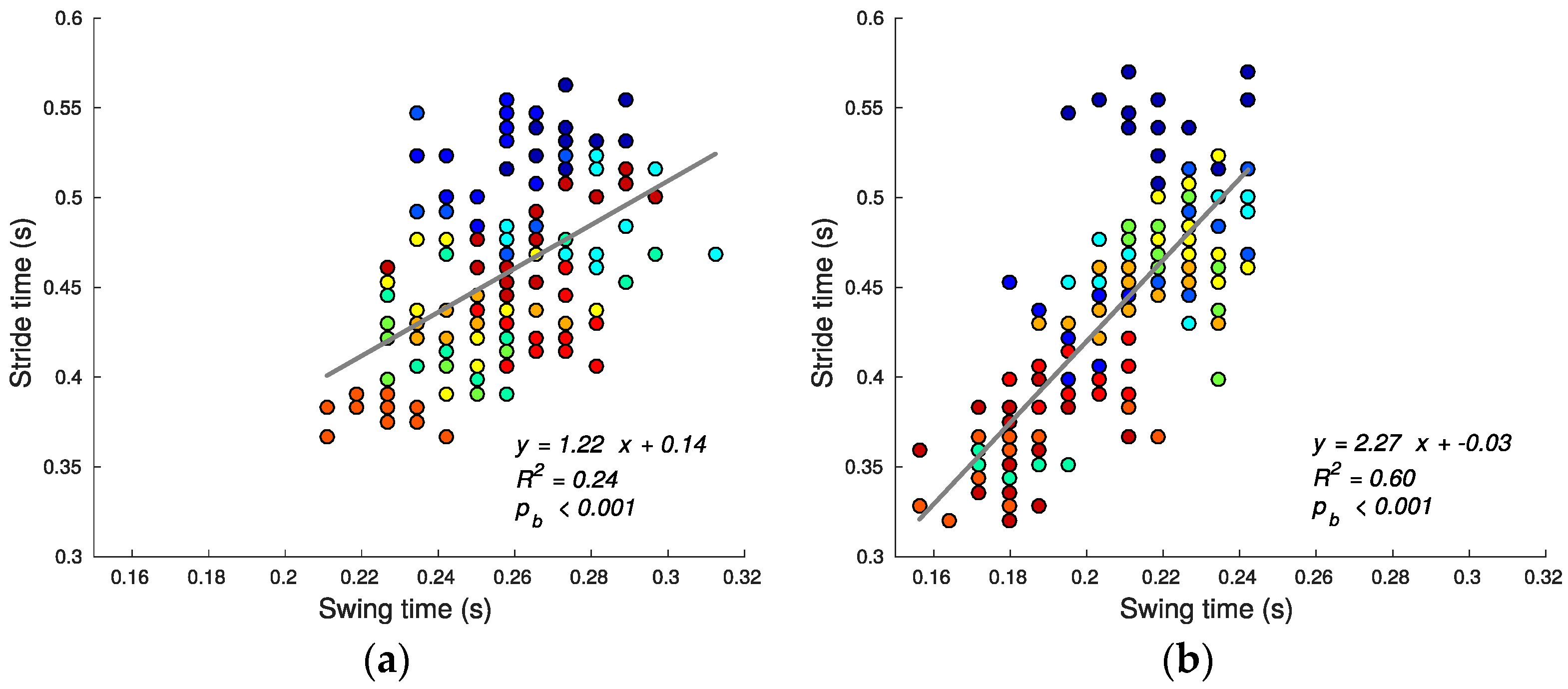
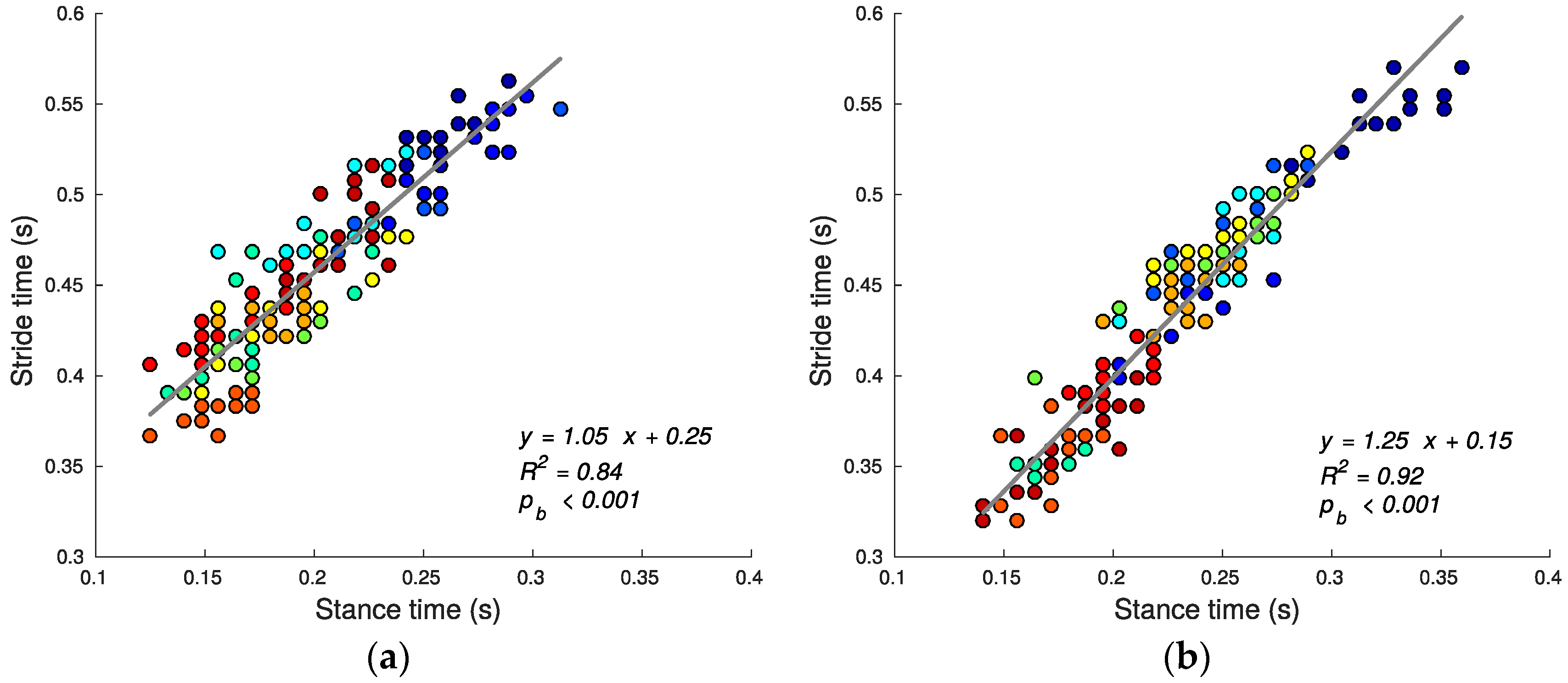
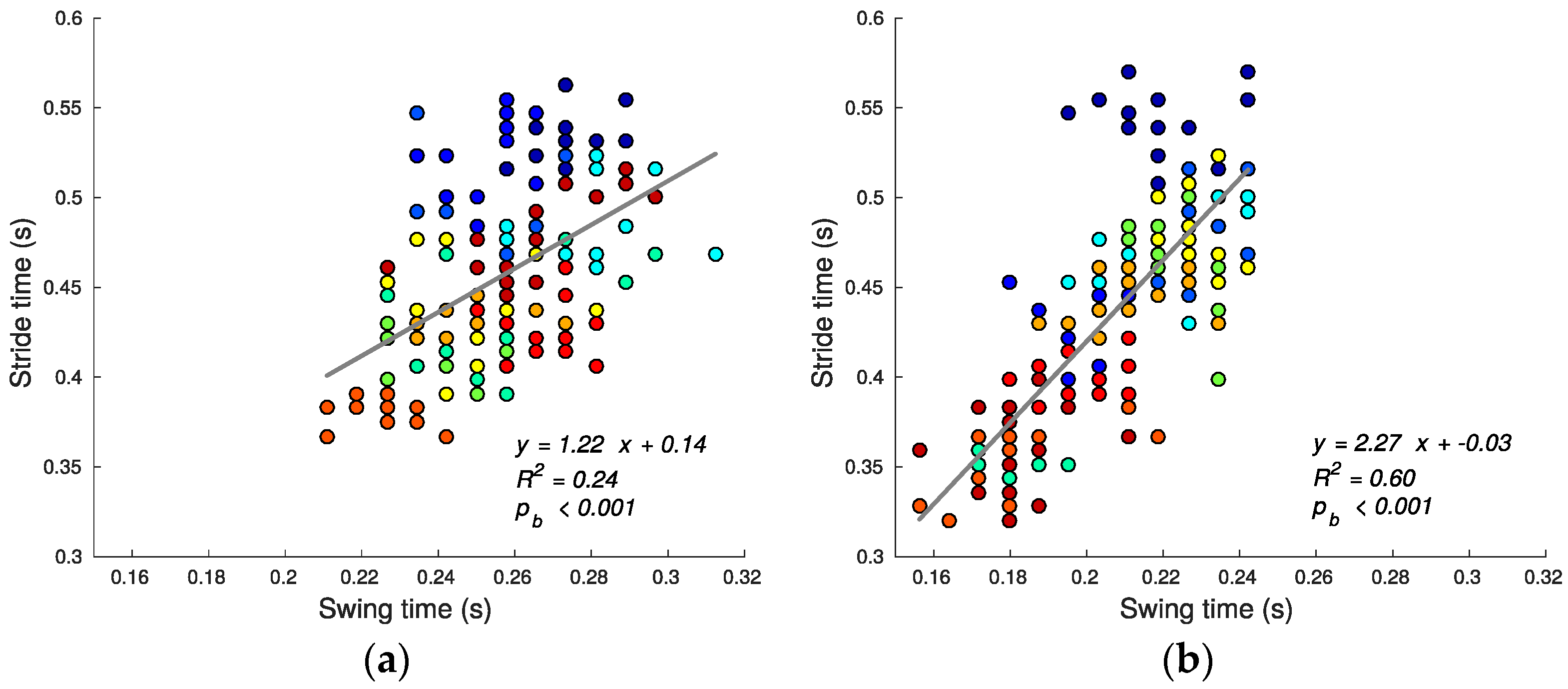
3.1. Gait Timing Variables
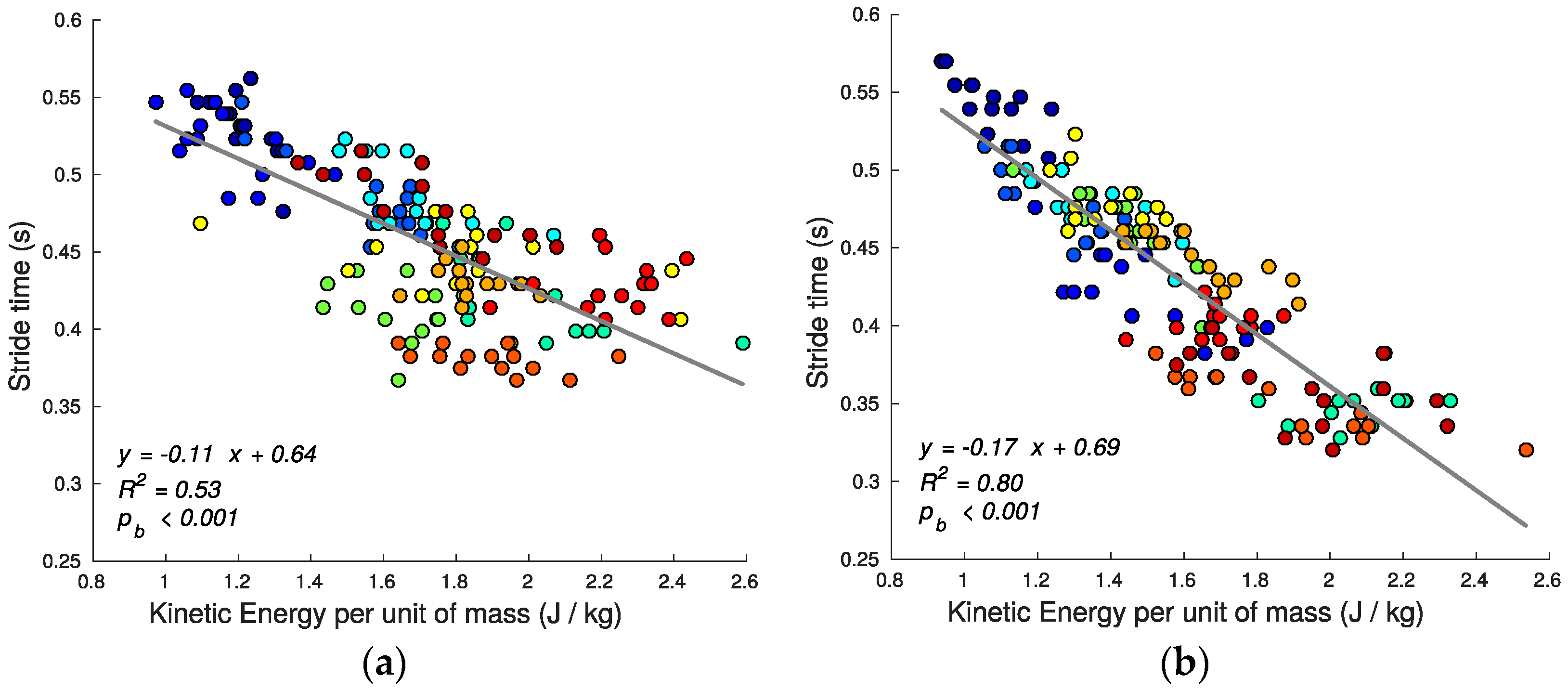
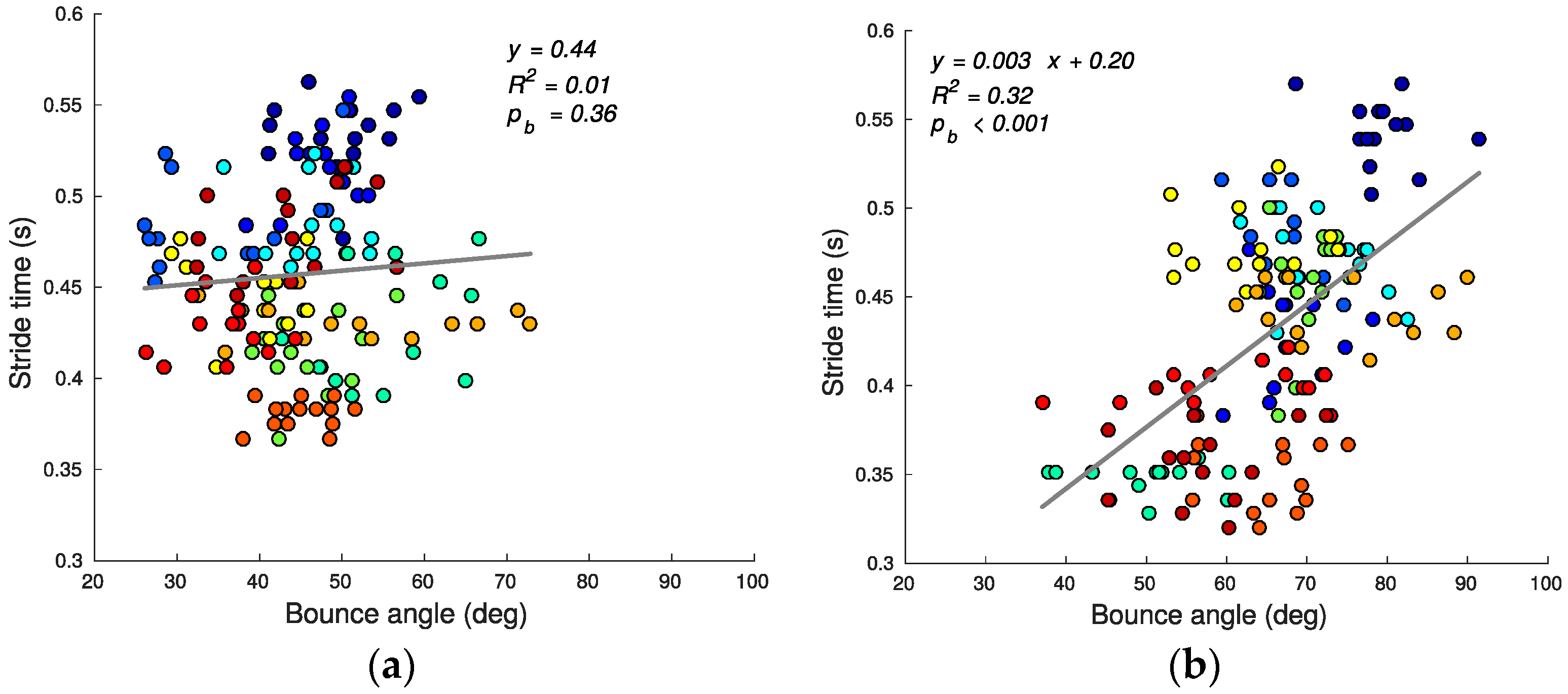
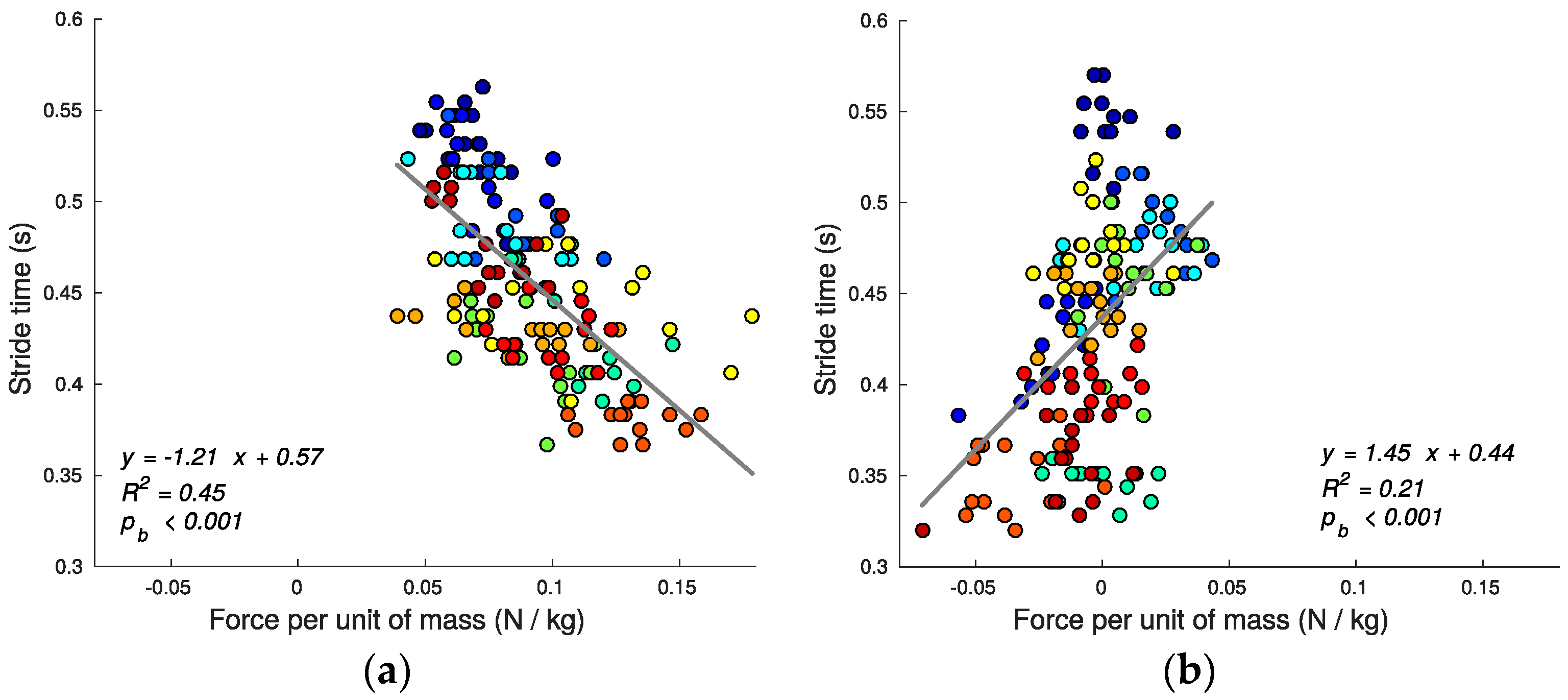
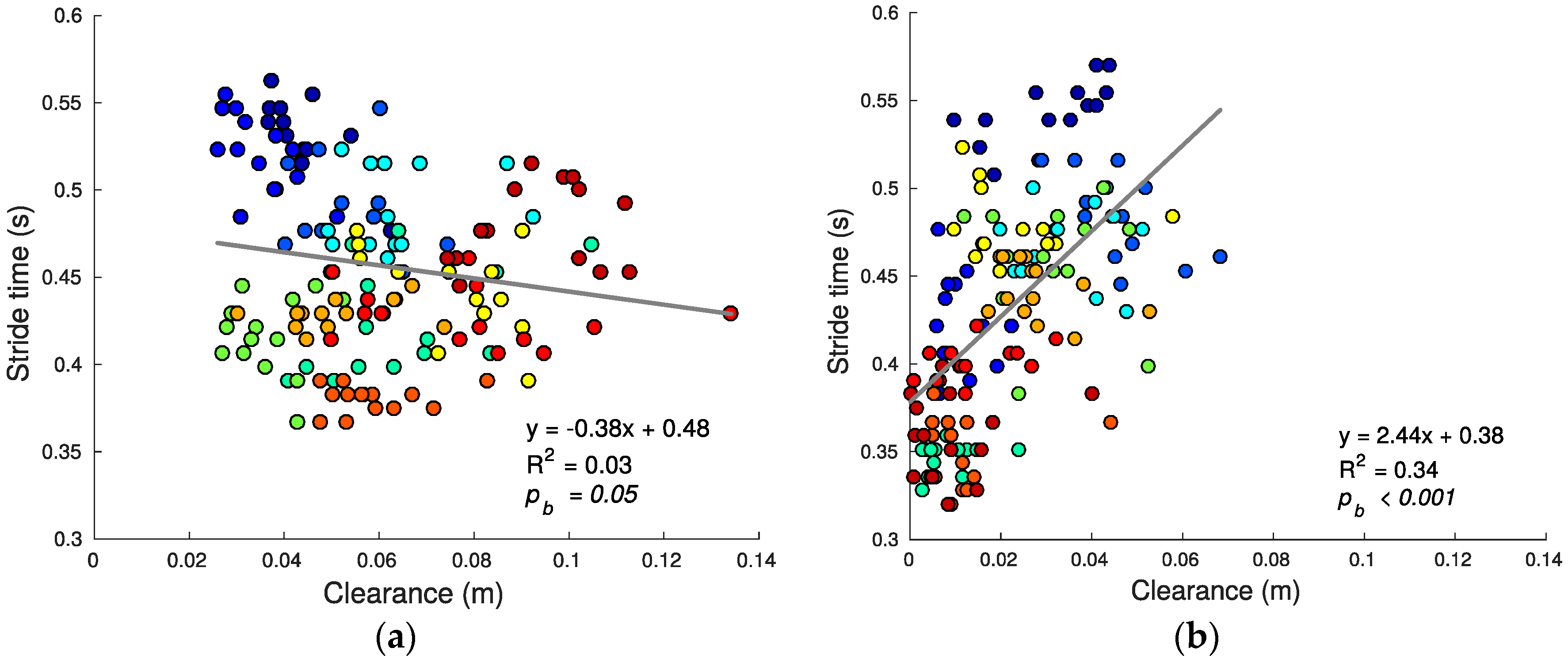
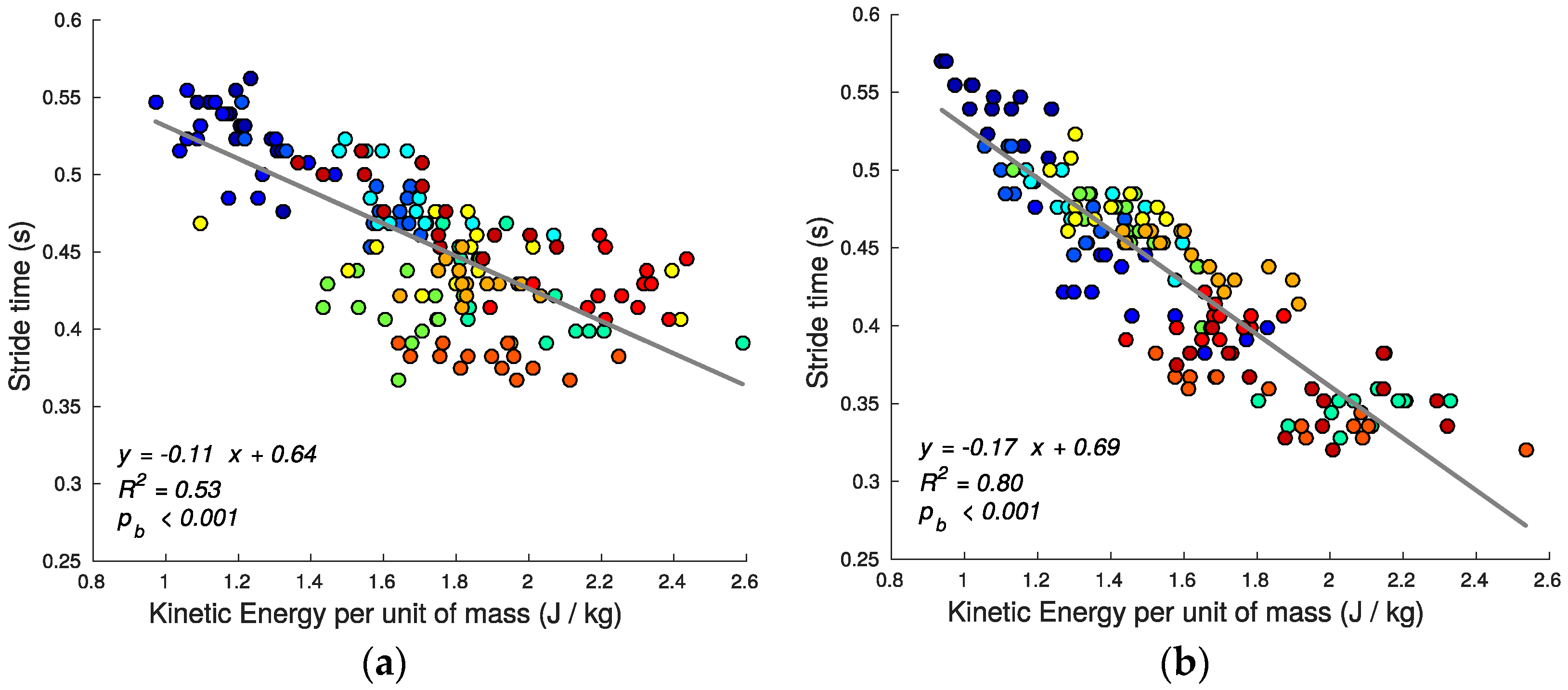
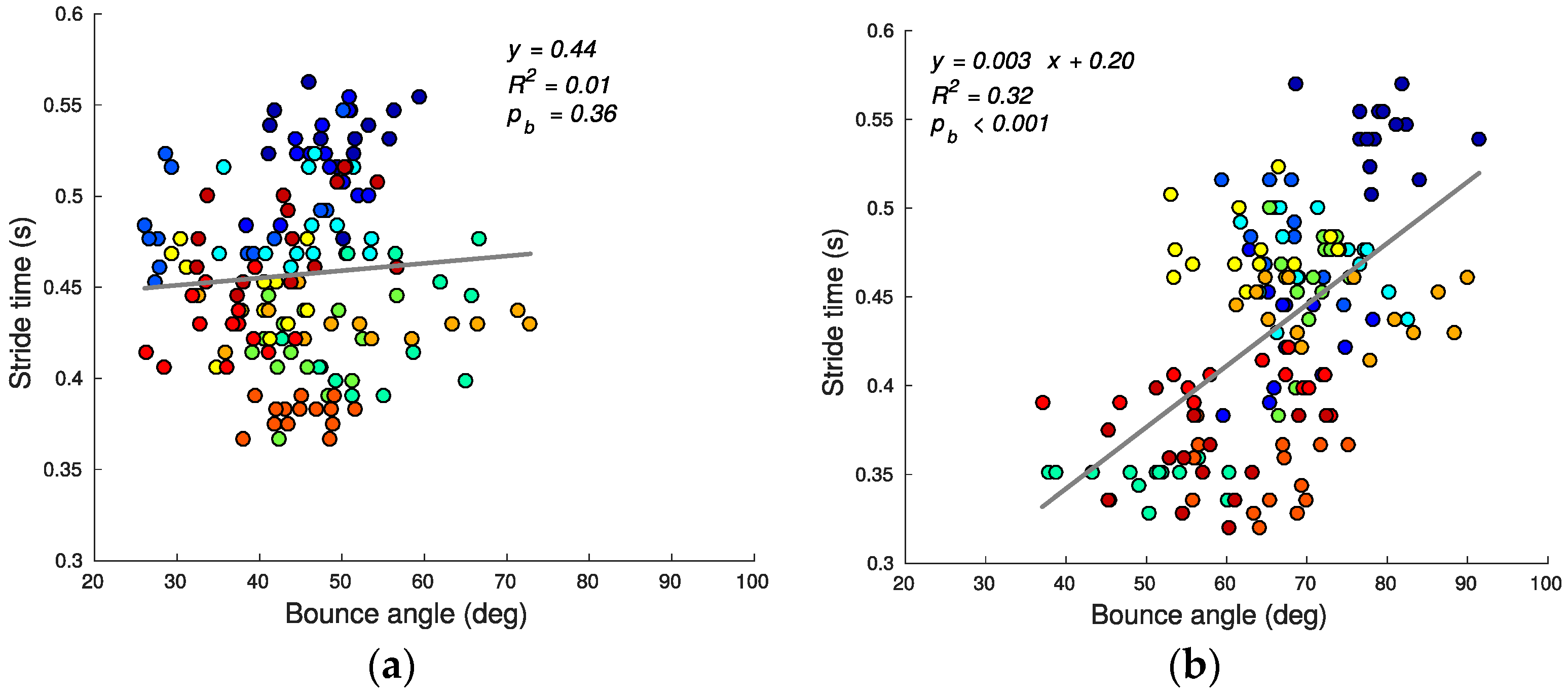
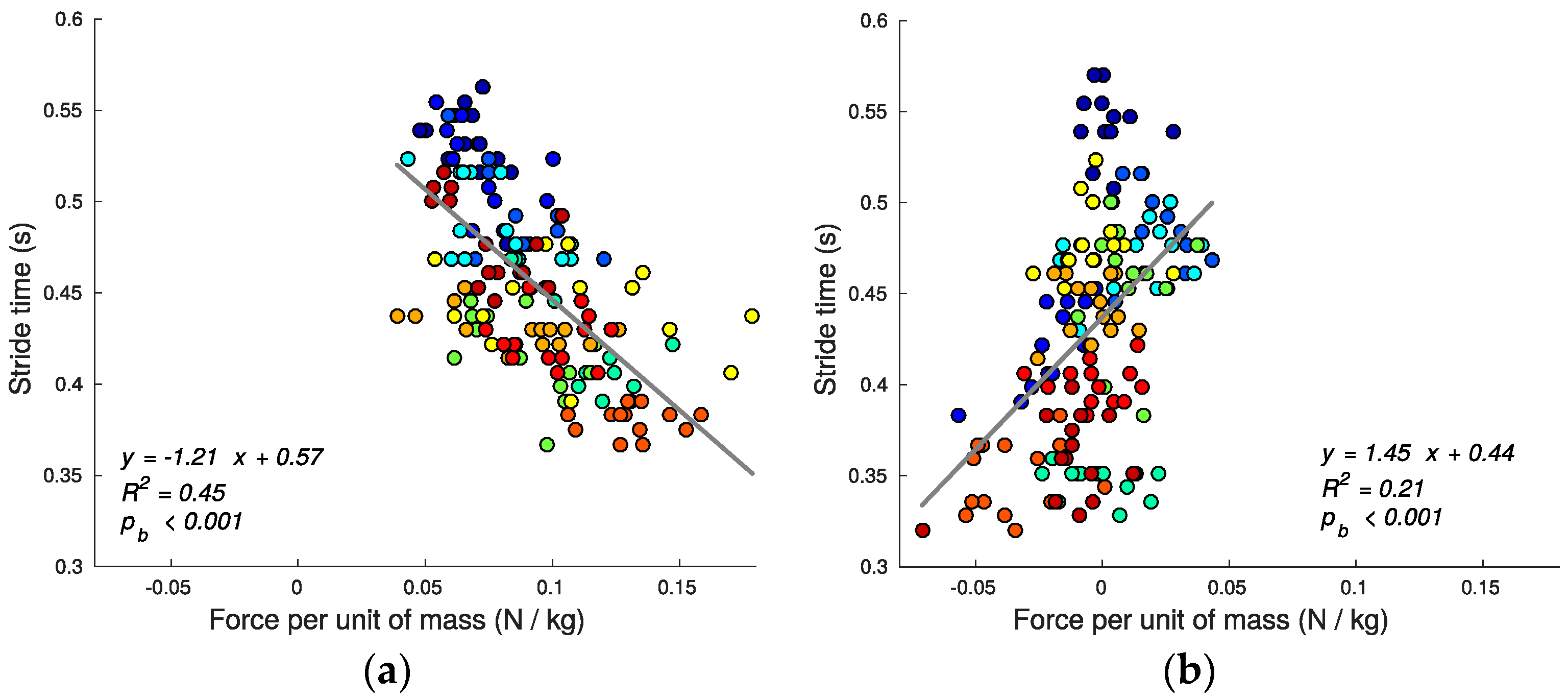
3.2. Gait Kinematic and Kinetic Variables
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kerr, J.; Eves, F.; Carroll, D. Six-Month Observational Study of Prompted Stair Climbing. Prev. Med. 2001, 33, 422–427. [Google Scholar] [CrossRef] [PubMed]
- Huskey, T.; Mayhew, J.L.; Ball, T.E.; Arnold, M.D. Factors affecting anaerobic power output in the Margaria-Kalamen test. Ergonomics 1989, 32, 959–965. [Google Scholar] [CrossRef] [PubMed]
- Harris, G.R.; Stone, M.H.; O’Bryant, H.S.; Johnson, R.L. Short-term performance effects of high power, high force, or combined weight-training methods. J. Strength Cond. Res. 2000, 14, 14–20. [Google Scholar]
- Protopapadaki, A.; Drechsler, W.; Cramp, M.C.; Coutts, F.J.; Scott, O.M. Hip, knee, ankle kinematics and kinetics during stair ascent and descent in healthy young individuals. Clin. Biomech. 2007, 22, 203–210. [Google Scholar] [CrossRef] [PubMed]
- De Wit, B.; De Clercq, D.; Aerts, P. Biomechanical analysis of the stance phase during barefoot and shod running. J. Biomech. 2000, 33, 269–278. [Google Scholar] [CrossRef]
- Braunstein, B.; Arampatzis, A.; Eysel, P.; Brüggemann, G.P. Footwear affects the gearing at the ankle and knee joints during running. J. Biomech. 2010, 43, 2120–2125. [Google Scholar] [CrossRef] [PubMed]
- Novacheck, T.F. The biomechanics of running. Gait Posture 1998, 7, 77–95. [Google Scholar] [CrossRef]
- Reid, S.M.; Graham, R.B.; Costigan, P.A. Differentiation of young and older adult stair climbing gait using principal component analysis. Gait Posture 2010, 31, 197–203. [Google Scholar] [CrossRef] [PubMed]
- Novak, A.C.; Brouwer, B. Kinematic and kinetic evaluation of the stance phase of stair ambulation in persons with stroke and healthy adults: A pilot study. J. Appl. Biomech. 2013, 29, 443–452. [Google Scholar] [CrossRef] [PubMed]
- Benedetti, M.G.; Agostini, V.; Knaflitz, M.; Bonato, P. Muscle activation patterns during level walking and stair ambulation. In Applications of EMG in Clinical and Sports Medicine; Steele, C., Ed.; Available online: https://cdn.intechopen.com/pdfs-wm/25822.pdf (accessed on 12 September 2017).
- Halsey, L.G.; David, A.R.; Watkins, D.A.; Duggan, B.M. The energy expenditure of stair climbing one step and two steps at a time: Estimations from measures of heart rate. PLoS ONE 2012, 9, e100658. [Google Scholar] [CrossRef] [PubMed]
- Johnson, A.N.; Cooper, D.F.; Edwards, R.H. Exertion of stair climbing in normal subjects and in patients with chronic obstructive bronchitis. Thorax 1977, 32, 711–716. [Google Scholar] [CrossRef] [PubMed]
- Beyea, J.; McGibbon, C.A.; Sexton, A.; Noble, J.; O’Connell, C. Convergent validity of a wearable sensor system for measuring sub-task performance during the timed up-and-go test. Sensors 2017, 17, 934. [Google Scholar] [CrossRef] [PubMed]
- Rebula, J.R.; Ojeda, L.V.; Adamczyk, P.G.; Kuo, A.D. Measurement of foot placement and its variability with inertial sensors. Gait Posture 2013, 38, 974–980. [Google Scholar] [CrossRef] [PubMed]
- Peruzzi, A.; Della Croce, U.; Cereatti, A. Estimation of stride length in level walking using an inertial measurement unit attached to the foot: A validation of the zero velocity assumption during stance. J. Biomech. 2011, 44, 1991–1994. [Google Scholar] [CrossRef] [PubMed]
- Seel, T.; Schauer, T.; Raisch, J. Joint axis and position estimation from inertial measurement data by exploiting kinematic constraints. In Proceedings of the 2012 IEEE International Conference Control Application, Dubrovnik, Croatia, 3–5 October 2012. [Google Scholar]
- Mariani, B.; Hoskovec, C.; Rochat, S.; Büla, C.; Penders, J.; Aminian, K. 3D gait assessment in young and elderly subjects using foot-worn inertial sensors. J. Biomech. 2010, 43, 2999–3006. [Google Scholar] [CrossRef] [PubMed]
- McGinnis, R.S.; Cain, S.M.; Davidson, S.P.; Vitali, R.V.; McLean, S.G.; Perkins, N.C. Inertial sensor and cluster analysis for discriminating agility run technique. IFAC 2017, 32, 150–156. [Google Scholar] [CrossRef]
- Chardonnens, J.; Favre, J.; Cuendet, F.; Gremion, G.; Aminian, K.A. System to measure the kinematics during the entire ski jump sequence using inertial sensors. J. Biomech. 2013, 46, 56–62. [Google Scholar] [CrossRef] [PubMed]
- Vitali, R.V.; Cain, S.M.; McGinnis, R.S.; Zaferiou, A.M.; Ojeda, L.V.; Davidson, S.P.; Perkins, N.C. Method for estimating three-dimensional knee rotations using two inertial measurement units: Validation with a coordinate measurement machine. Sensors 2017, 17, 1970. [Google Scholar] [CrossRef] [PubMed]
- El-Sheimy, N.; Hou, H.; Niu, X. Analysis and modeling of inertial sensors using Allan variance. IEEE Trans. Instrum. Meas. 2008, 57, 140–149. [Google Scholar] [CrossRef]
- Ojeda, L.; Borenstein, J. Non-GPS Navigation for Security Personnel and First Responders. J. Navig. 2007, 60, 391–407. [Google Scholar] [CrossRef]
- Ojeda, L.V.; Rebula, J.R.; Adamczyk, P.G.; Kuo, A.D. Mobile platform for motion capture of locomotion over long distances. J. Biomech. 2013, 46, 2316–2319. [Google Scholar] [CrossRef] [PubMed]
- Titterton, D.; Weston, J. Strapdown Inertial Navigation Technology, 2nd ed.; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2004; ISBN 978-0863413582. [Google Scholar]
- Rogers, R.M. Applied Mathematics in Integrated Navigation Systems, 3rd ed.; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2007; ISBN 9781563479274. [Google Scholar]
- Shoemake, K. Animating rotation with quaternion curves. In Proceedings of the 12th Annual Conference on Computer Graphics and Interactive Techniques, New York, NY, USA, 22–26 July 1985; pp. 245–254. [Google Scholar]
- Farrell, J.A.; Barth, M. The Global Positioning System & Inertial Navigation; McGraw-Hill Professional: New York, NY, USA, 1998; ISBN 0-07-022045-X. [Google Scholar]
- Kalman, R. A New Approach to Linear Filtering and Prediction Problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Grover, R.G.; Hwang, P.Y. Introduction to Random Signals and Applied Kalman Filtering with Matlab Exercises, 4th ed.; John Wiley & Sons Inc.: New York, NY, USA, 2012; ISBN 978-1-118-21485-5. [Google Scholar]
- Savage, P.G. Strapdown Inertial Navigation Integration Algorithm Design Part 1: Attitude Algorithms. J. Guid. Control Dyn. 1998, 21, 19–28. [Google Scholar] [CrossRef]
- Savage, P.G. Strapdown Inertial Navigation Integration Algorithm Design Part 2: Velocity and Position Algorithms. J. Guid. Control Dyn. 1998, 21, 208–221. [Google Scholar] [CrossRef]
- Cain, S.M.; McGinnis, R.S.; Davidson, S.P.; Vitali, R.V.; Perkins, N.C.; McLean, S.G. Quantifying performance and effects of load carriage during a challenging balancing task using an array of wireless inertial sensors. Gait Posture 2016, 43, 65–69. [Google Scholar] [CrossRef] [PubMed]
- Sadeghi, H.; Allard, P.; Prince, F.; Labelle, H. Symmetry and limb dominance in able-bodied gait: A review. Gait Posture 2000, 12, 34–45. [Google Scholar] [CrossRef]
- Arampatzis, A.; Brüggemann, G.P.; Metzler, V. The effect of speed on leg stiffness and joint kinetics in human running. J. Biomech. 1999, 32, 1349–1353. [Google Scholar] [CrossRef]
- Charalambous, L.; Irwin, G.; Bezodis, I.N.; Kerwin, D. Lower limb joint kinetics and ankle joint stiffness in the sprint start push-off. J. Sports Sci. 2012, 30, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Butler, R.J.; Crowell, H.P.; Davis, I.M. Lower extremity stiffness: Implications for performance and injury. Clin. Biomech. 2003, 18, 511–517. [Google Scholar] [CrossRef]
- Howell, D.C. Statistical Methods for Psychology, 6th ed.; Thomson Wadsworth: Belmont, CA, USA, 2007; ISBN 0495012874. [Google Scholar]
- Tabachnick, B.G.; Fidell, L.S. Using Multivariate Statistics, 5th ed.; Allyn and Bacon: Boston, MA, USA, 2007; ISBN 0205459382. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Direction | vs. R2/ | vs. R2/ | SD (s) | SD (s) | Mean ± SD (%) |
|---|---|---|---|---|---|
| Ascent | 0.84/1.05 | 0.24/1.22 † | 0.044 | 0.020 | 44.3 ± 10.8 |
| Descent | 0.92/1.25 † | 0.60/2.27 † | 0.049 | 0.022 | 53.4 ± 13.5 |
| Direction | vs. R2/ | vs. R2/ | vs. R2/ | vs. R2/ | Mean ± SD (m) | Mean ± SD (deg) | Mean ± SD (N/Kg) |
|---|---|---|---|---|---|---|---|
| Ascent | 0.03/−0.38 ‡,* | 0.53/−0.11 ‡ | 0.01/0.0 †,* | 0.45/−1.21 | 0.06 ± 0.02 | 45.0 ± 9.2 | 0.09 ± 0.03 |
| Descent | 0.34/2.44 † | 0.80/−0.17 ‡ | 0.32/3 × 10−3 | 0.21/1.45 | 0.02 ± 0.02 | 66.2 ± 10.4 | 0.0 ± 0.02 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ojeda, L.V.; Zaferiou, A.M.; Cain, S.M.; Vitali, R.V.; Davidson, S.P.; Stirling, L.A.; Perkins, N.C. Estimating Stair Running Performance Using Inertial Sensors. Sensors 2017, 17, 2647. https://doi.org/10.3390/s17112647
Ojeda LV, Zaferiou AM, Cain SM, Vitali RV, Davidson SP, Stirling LA, Perkins NC. Estimating Stair Running Performance Using Inertial Sensors. Sensors. 2017; 17(11):2647. https://doi.org/10.3390/s17112647
Chicago/Turabian StyleOjeda, Lauro V., Antonia M. Zaferiou, Stephen M. Cain, Rachel V. Vitali, Steven P. Davidson, Leia A. Stirling, and Noel C. Perkins. 2017. "Estimating Stair Running Performance Using Inertial Sensors" Sensors 17, no. 11: 2647. https://doi.org/10.3390/s17112647
APA StyleOjeda, L. V., Zaferiou, A. M., Cain, S. M., Vitali, R. V., Davidson, S. P., Stirling, L. A., & Perkins, N. C. (2017). Estimating Stair Running Performance Using Inertial Sensors. Sensors, 17(11), 2647. https://doi.org/10.3390/s17112647