A Pneumatic Tactile Sensor for Co-Operative Robots


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
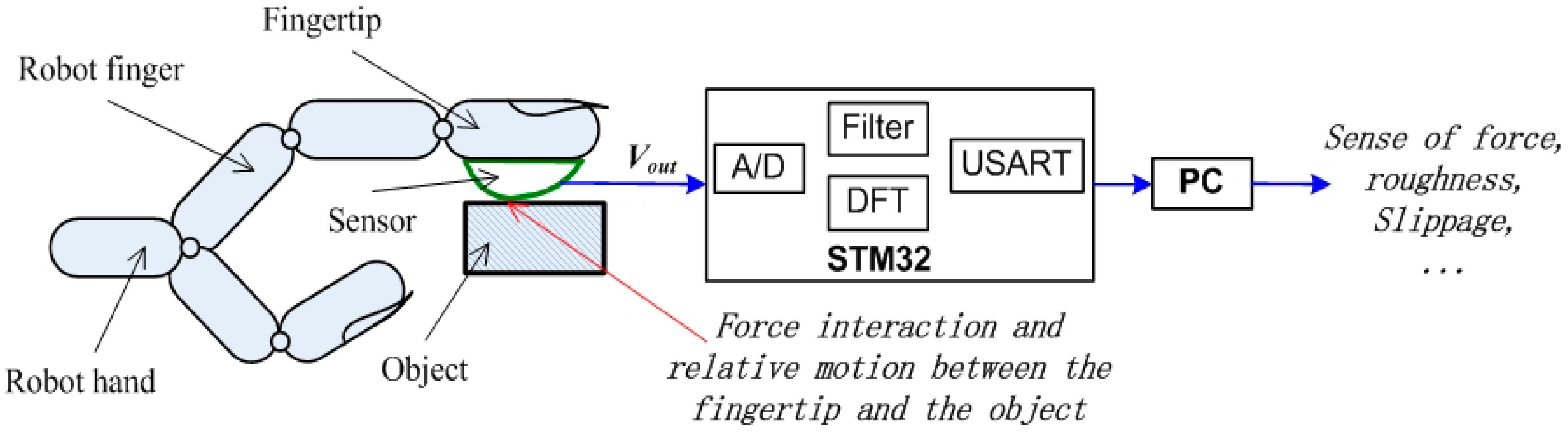
:1. Introduction
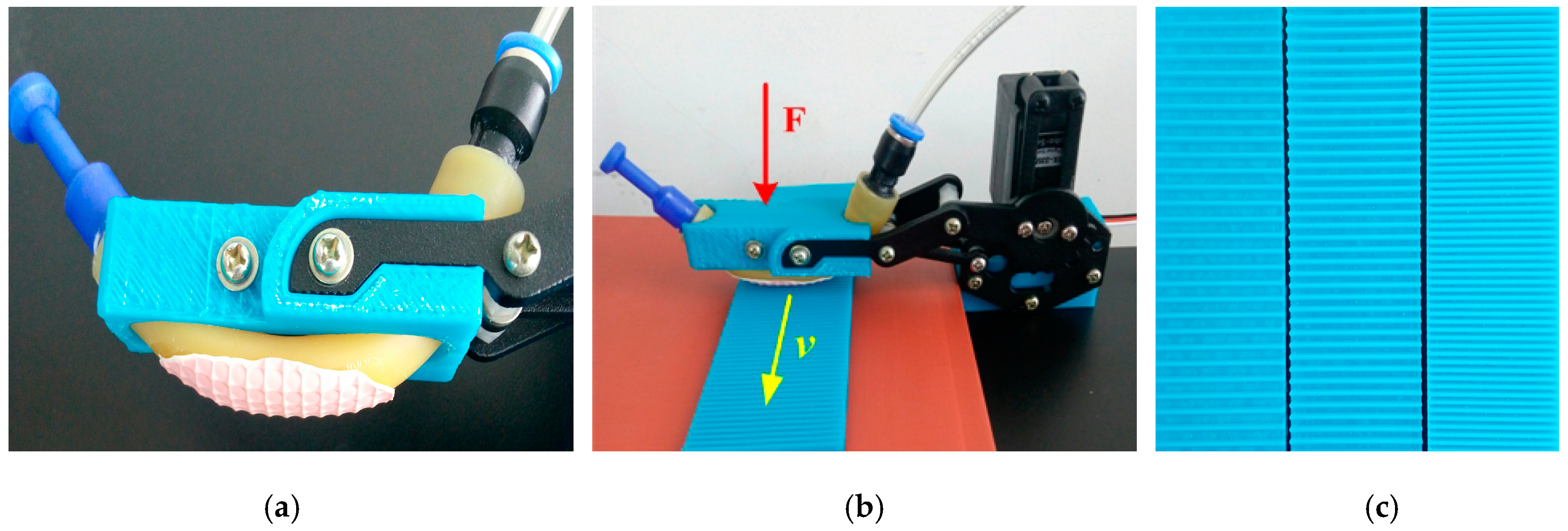
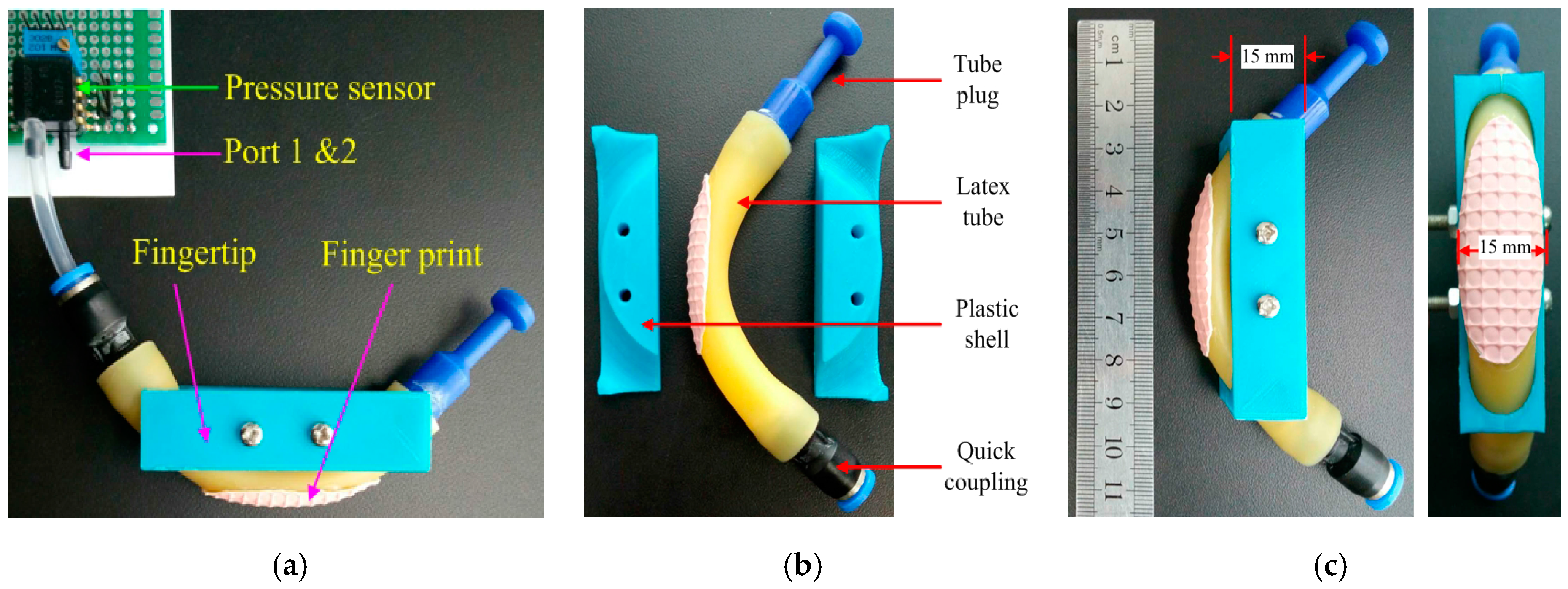
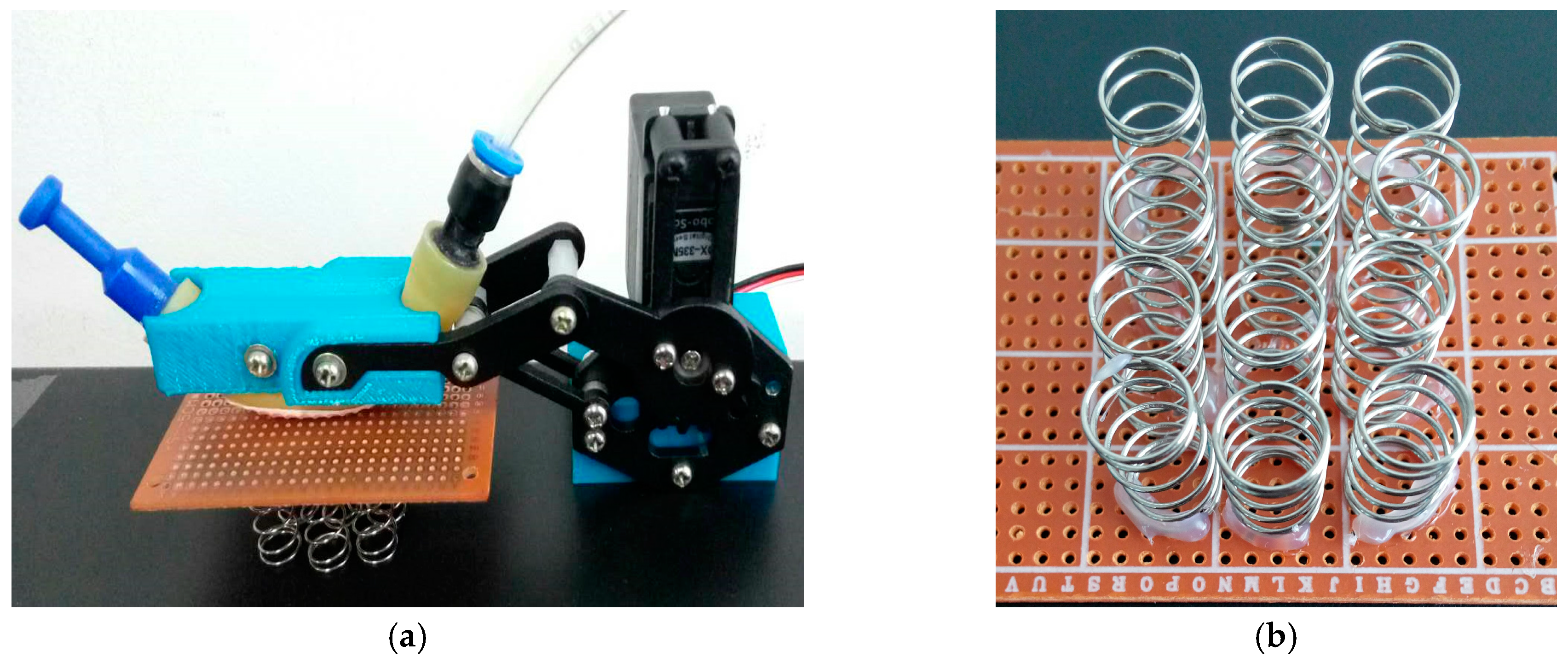
2. Materials and Fabrication
3. Parameters and Performance
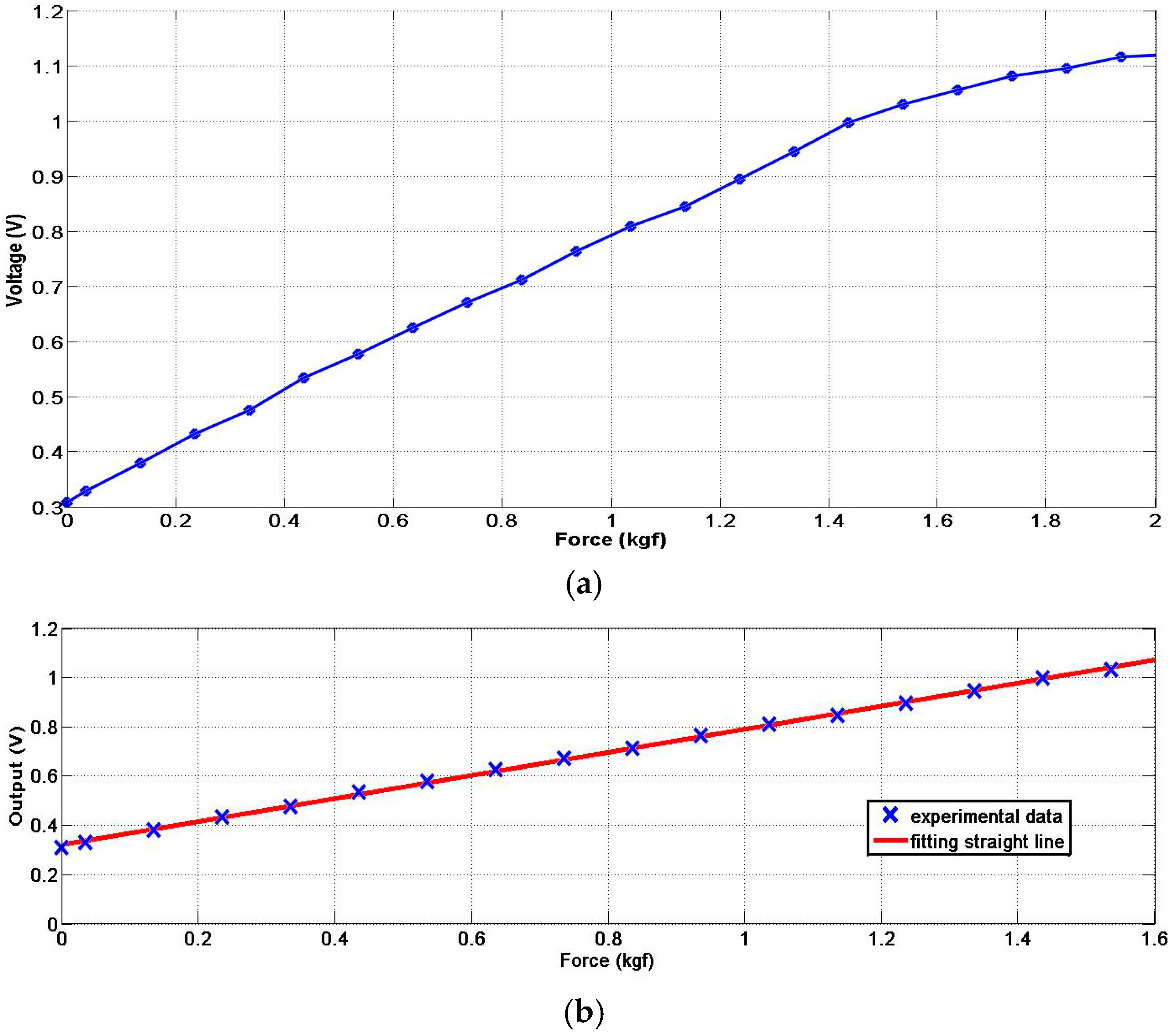
3.1. Sensing of Force
3.1.1. Linearity
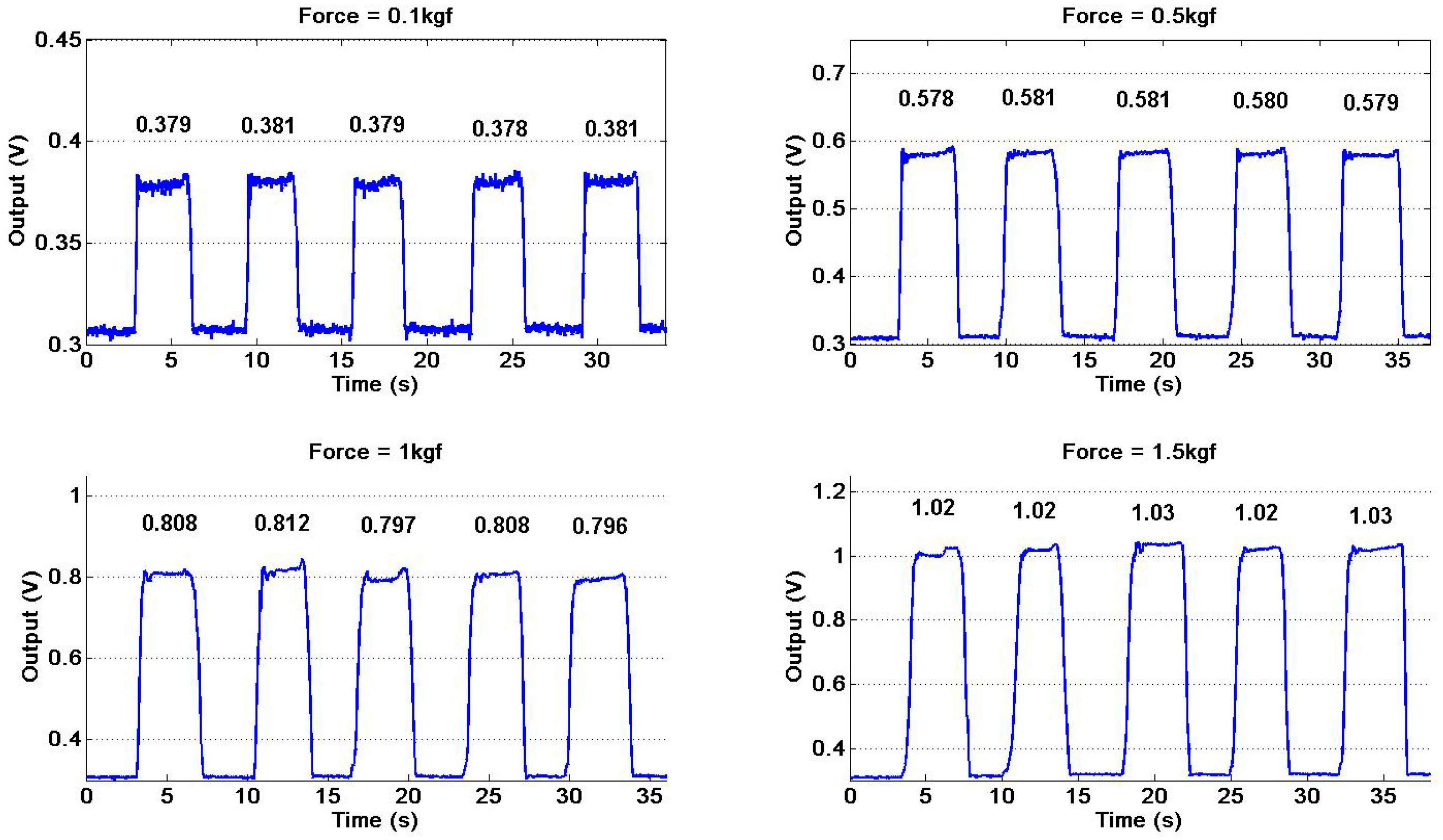
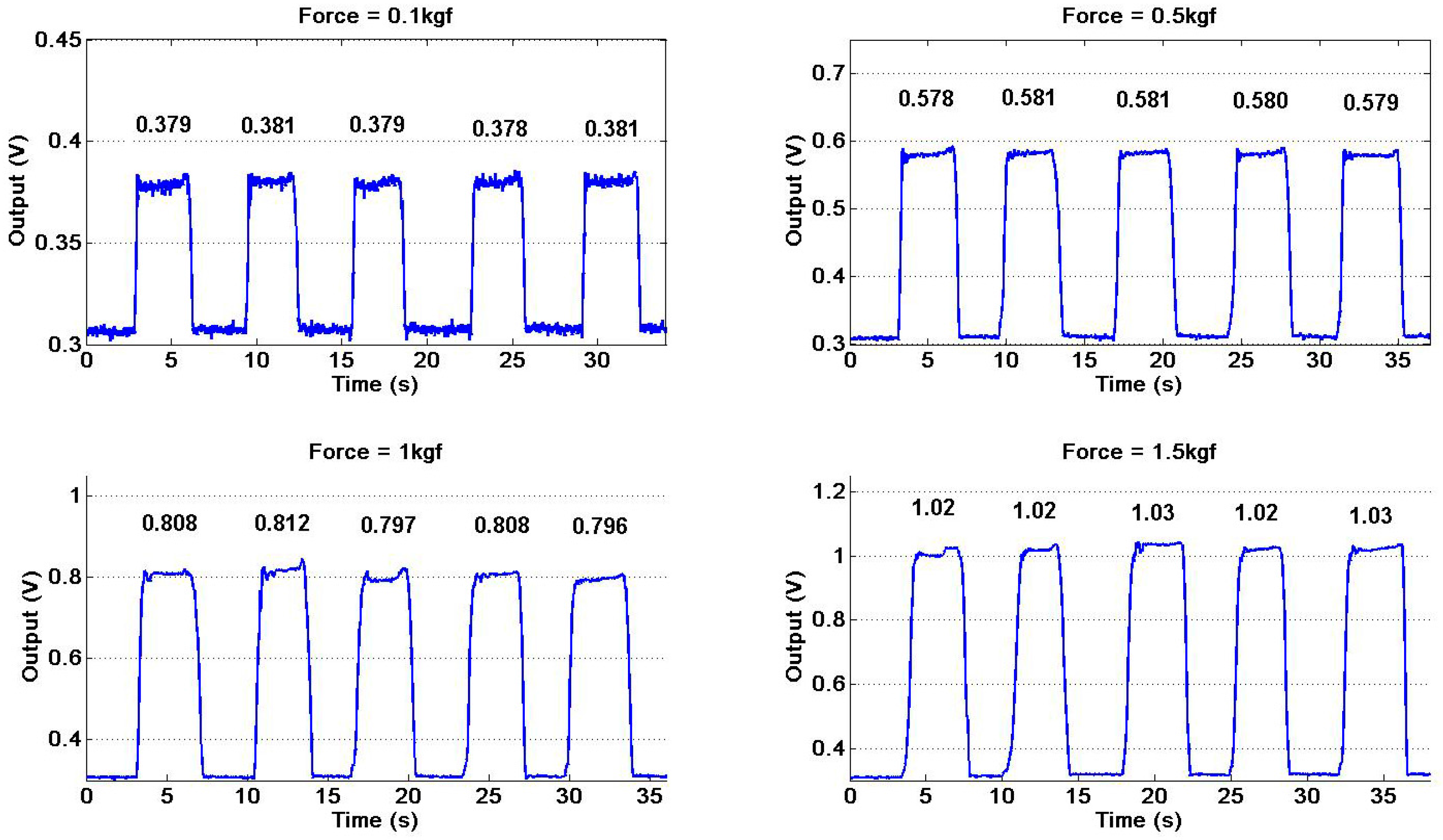
3.1.2. Repeatability
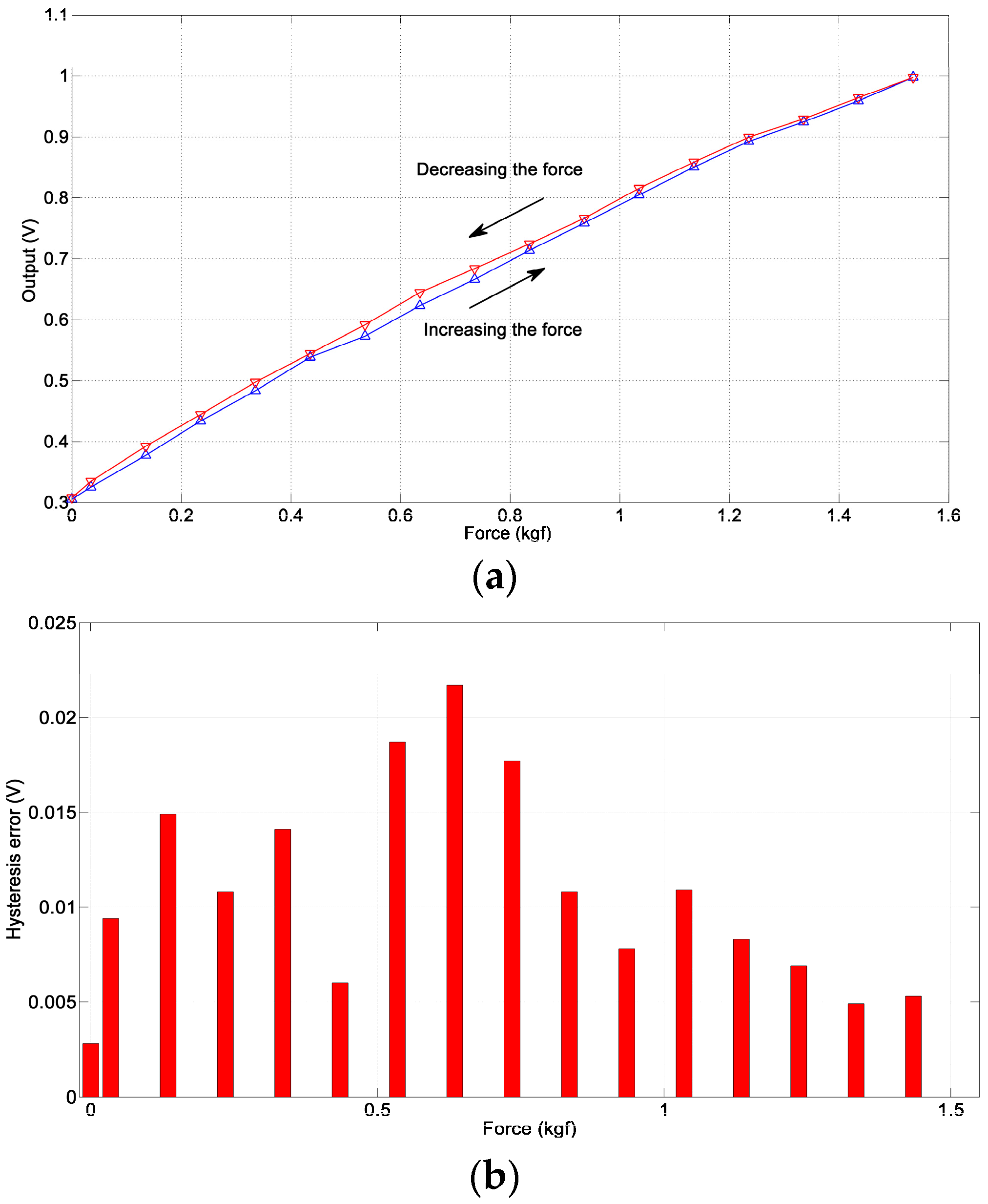
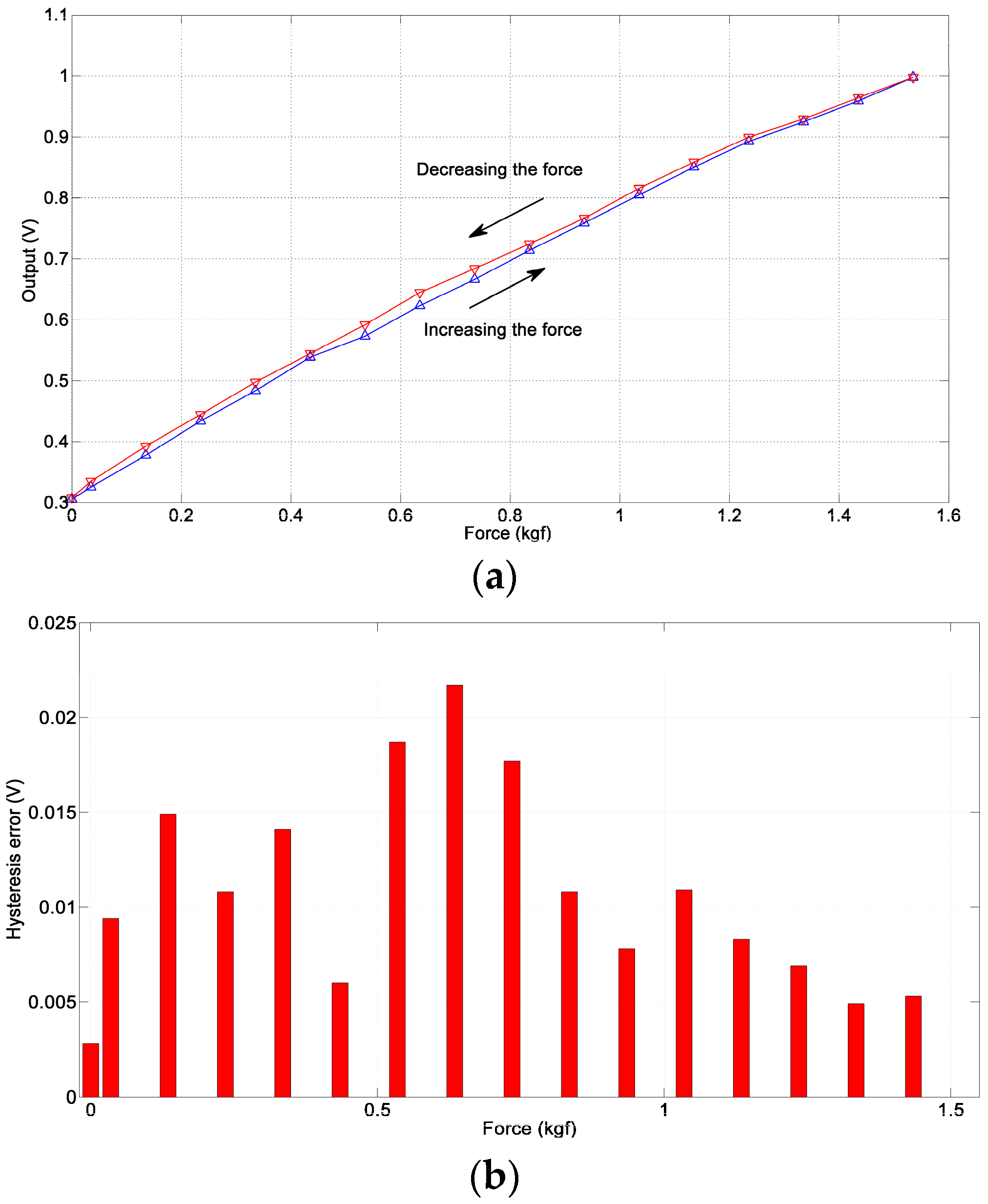
3.1.3. Hysteresis
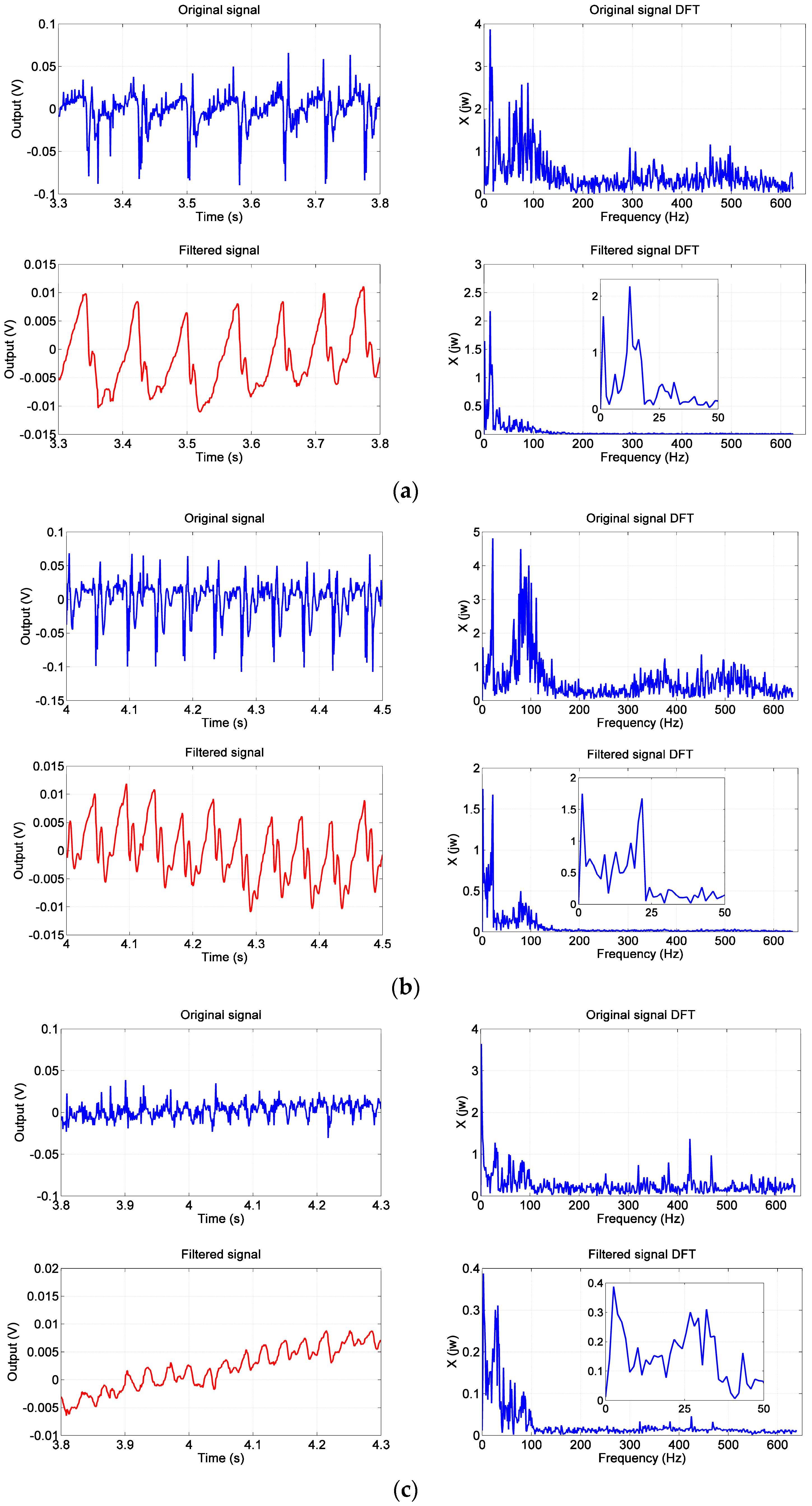
3.2. Sensing of Surface Characteristics
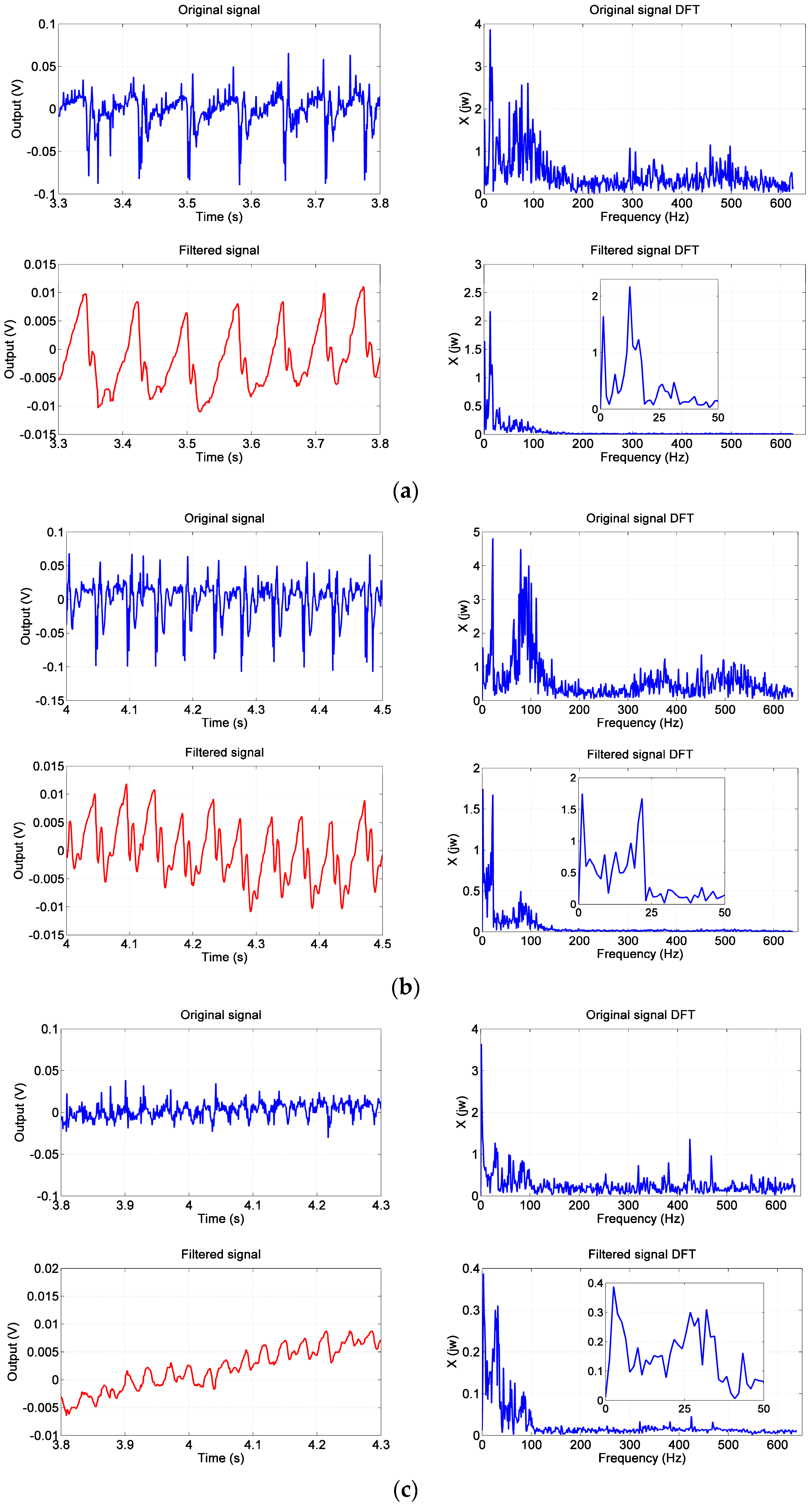
3.2.1. Sensing of Roughness
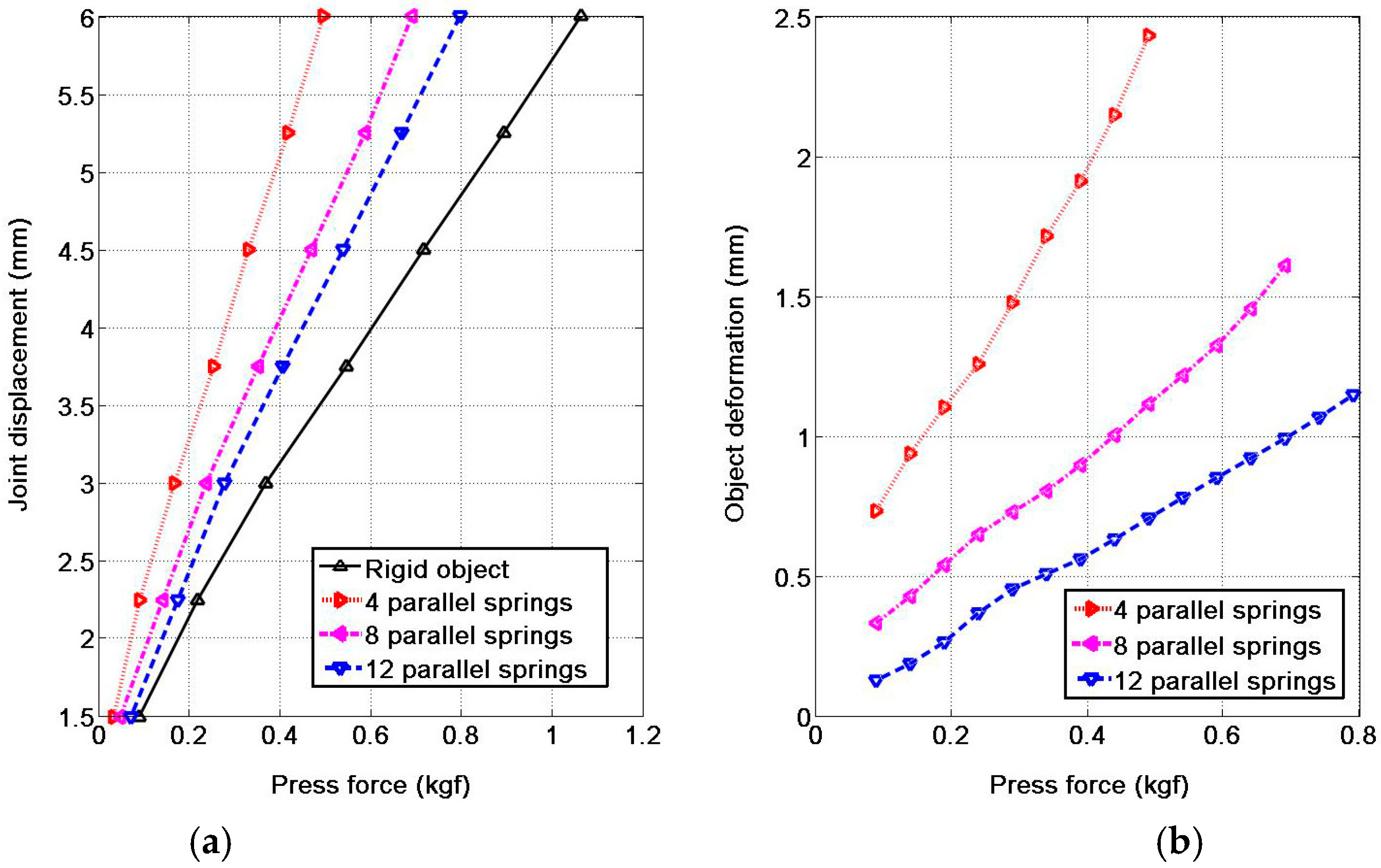
3.2.2. Sensing of Softness
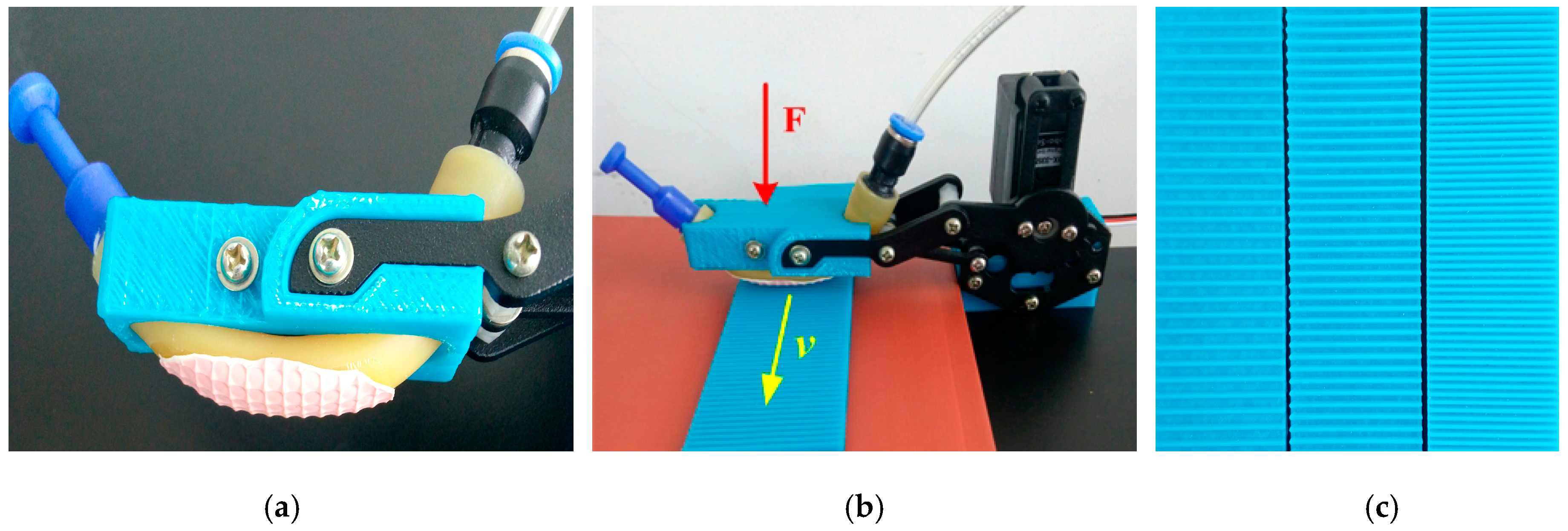
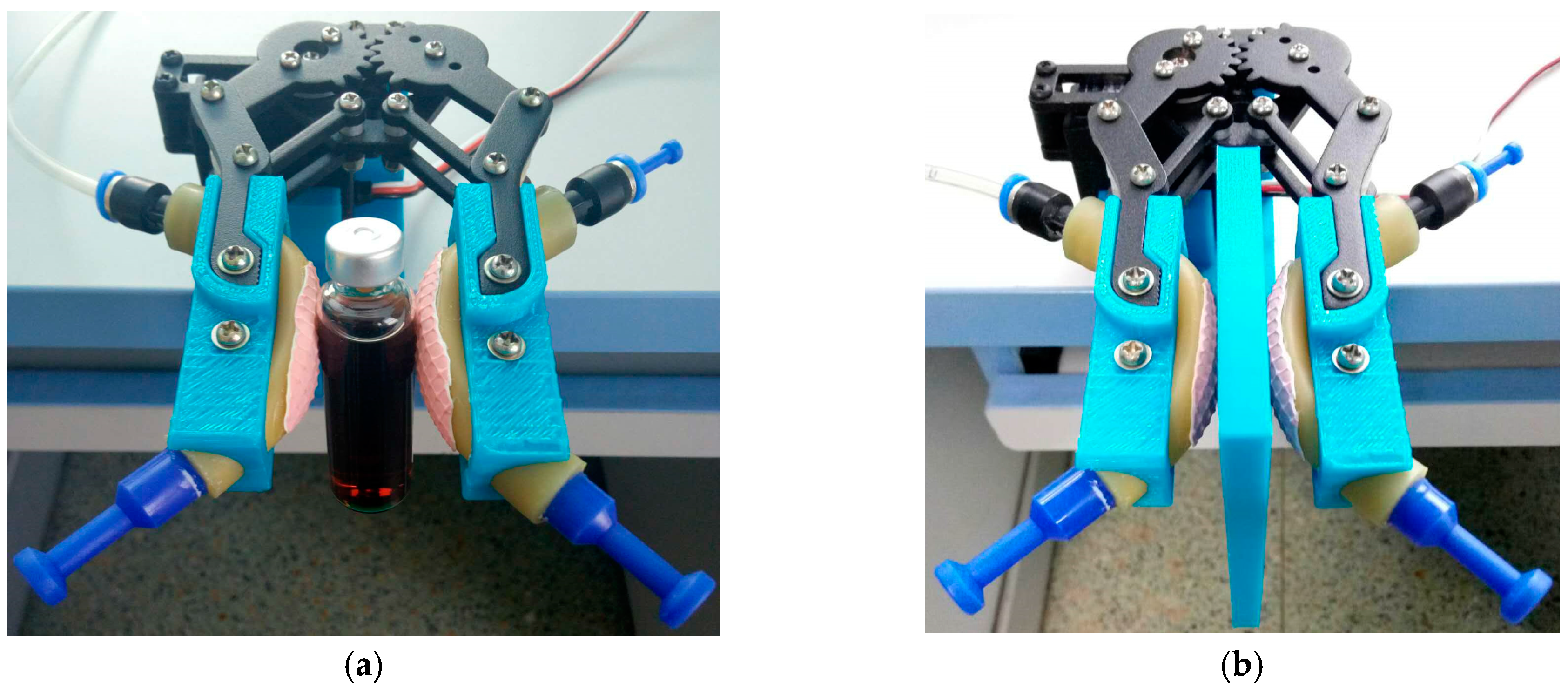
3.3. Sensing of Slippage
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- De Oliveira, T.E.A.; Cretu, A.-M.; Da Fonseca, V.P.; Petriu, E.M. Touch sensing for humanoid robots. IEEE Instrum. Meas. Mag. 2015, 18, 13–19. [Google Scholar] [CrossRef]
- Yousef, H.; Boukallela, M.; Althoefer, K. Tactile sensing for dexterous in-hand manipulation in robotics—A review. Sens. Actuators A Phys. 2011, 167, 171–187. [Google Scholar] [CrossRef]
- Zhang, T.; Jiang, L.; Wu, X.; Feng, W.; Zhou, D.; Liu, H. Fingertip three-axis tactile sensor for multifingered grasping. IEEE/ASME Trans. Mechatron. 2015, 20, 1875–1885. [Google Scholar] [CrossRef]
- Silvera-Tawil, D.; Ryeb, D.; Velonaki, M. Artificial skin and tactile sensing for socially interactive robots: A review. Robot. Auton. Syst. 2015, 63, 230–243. [Google Scholar] [CrossRef]
- Delgado, A.; Jarab, C.A.; Torres, F. In-hand recognition and manipulation of elastic objects using a servo-tactile control strategy. Robot. Comput. Integr. Manuf. 2017, 48, 102–112. [Google Scholar] [CrossRef]
- Francomano, M.T.; Accoto, D.; Guglielmelli, E. Artificial sense of slip—A review. IEEE Sens. J. 2013, 13, 2489–2498. [Google Scholar] [CrossRef]
- Su, Z.; Hausman, K.; Chebotar, Y.; Molchanov, A.; Loeb, G.E.; Sukhatme, G.S.; Schaal, S. Force estimation and slip detection/classification for grip control using a biomimetic tactile sensor. In Proceedings of the 15th IEEE-RAS International Conference on Humanoid Robots, Seoul, Korea, 3–5 November 2015; pp. 297–303. [Google Scholar]
- Saudabayev, A.; Varol, H.A. Sensors for robotic hands: A survey of state of the art. IEEE Access 2015, 3, 1765–1782. [Google Scholar] [CrossRef]
- Wettels, N.; Parnandi, A.R.; Moon, J.-H.; Loeb, G.E.; Sukhatme, G.S. Grip control using biomimetic tactile sensing systems. IEEE/ASME Trans. Mechatron. 2009, 14, 718–723. [Google Scholar] [CrossRef]
- Kappassov, Z.; Corrales, J.-A.; Perdereau, V. Tactile sensing in dexterous robot hands—Review. Robot. Auton. 2015, 74, 195–220. [Google Scholar] [CrossRef]
- Tiwana, M.I.; Redmond, S.J.; Lovell, N.H. A review of tactile sensing technologies with applications in biomedical engineering. Sens. Actuators A Phys. 2012, 179, 17–31. [Google Scholar] [CrossRef]
- Dahiya, R.S.; Metta, G.; Valle, M.; Sandini, G. Tactile sensing—From humans to humanoids. IEEE Trans. Robot. 2010, 26, 1–20. [Google Scholar] [CrossRef]
- Ribeiro, P.; Khan, M.A.; Alfadhel, A.; Kosel, J.; Franco, F.; Cardoso, S.; Bernardino, A.; Schmitz, A.; Santos-Victor, J.; Jamone, L. Bio-inspired ciliary force sensor for robotic platforms. IEEE Robot. Autom. Lett. 2017, 2, 971–976. [Google Scholar] [CrossRef]
- Fujiwara, E.; Wu, Y.T.; dos Santos, M.F.M.; Schenkel, E.A.; Suzuki, C.K. Development of a tactile sensor based on optical fiber specklegram analysis and sensor data fusion technique. Sens. Actuators A Phys. 2017, 263, 677–686. [Google Scholar] [CrossRef]
- De Maria, G.; Natale, C.; Pirozzi, S. Tactile data modeling and interpretation for stable grasping and manipulation. Robot. Auton. Syst. 2013, 61, 1008–1020. [Google Scholar] [CrossRef]
- Jamone, L.; Natale, L.; Metta, G.; Sandini, G. Highly sensitive soft tactile sensors for an anthropomorphic robotic hand. IEEE Sens. J. 2015, 15, 4226–4233. [Google Scholar] [CrossRef]
- Lee, H.; Chang, S.; Yoon, E. A flexible polymer tactile sensor: Fabrication and modular expandability for large area deployment. J. Microelectromechan. Syst. 2006, 15, 1681–1686. [Google Scholar] [CrossRef]
- Girão, P.S.; Ramos, P.M.P.; Postolache, O.; Pereira, J.M.D. Tactile sensors for robotic applications. Measurement 2013, 46, 1257–1271. [Google Scholar] [CrossRef]
- Yu, P.; Liu, W.; Gu, C.; Cheng, X.; Fu, X. Flexible piezoelectric tactile sensor array for dynamic three-axis force measurement. Sensors 2016, 16. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.I.; Kim, M.-G.; Shikida, M.; Sato, K. A table-shaped tactile sensor for detecting triaxial force on the basis of strain distribution. Sensors 2013, 13, 16347–16359. [Google Scholar] [CrossRef] [PubMed]
- Oddo, C.M.; Beccai, L.; Felder, M.; Giovacchini, F.; Carrozza, M.C. Artificial roughness encoding with a bio-inspired MEMS-Based tactile sensor array. Sensors 2009, 9, 3161–3183. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dobrzynska, J.A.; Gijs, M.A.M. Flexible polyimide-based force sensor. Sens. Actuators A Phys. 2012, 173, 127–135. [Google Scholar] [CrossRef]
- Chun, S.; Choi, Y.; Suh, D.I.; Bae, G.Y.; Hyun, S.; Park, W. A tactile sensor using single layer graphene for surface texture recognition. Nanoscale 2017, 9, 10248–10255. [Google Scholar] [CrossRef] [PubMed]
- Wong, R.D.P.; Posner, J.D.; Santos, V.J. Flexible microfluidic normal force sensor skin for tactile feedback. Sens. Actuators A Phys. 2012, 179, 62–69. [Google Scholar] [CrossRef]
- Vogt, D.M.; Park, Y.-L.; Wood, R.J. Design and characterization of a soft multi-axis force sensor using embedded microfluidic channels. IEEE Sens. J. 2013, 13, 4056–4064. [Google Scholar] [CrossRef]
- Yeo, J.C.; Kenry; Yu, J.; Loh, K.P.; Wang, Z.; Lim, C.T. Triple-state liquid-based microfluidic tactile sensor with high flexibility, durability, and sensitivity. ACS Sens. 2016, 1, 543–551. [Google Scholar] [CrossRef]
- Chen, L.; Liu, J.; Wang, X.; Ji, B.; Chen, X.; Yang, B. Flexible capacitive hydrogel tactile sensor with adjustable measurement range using liquid crystal and carbon nanotubes composites. IEEE Trans. Electron. Devices 2017, 64, 1968–1972. [Google Scholar] [CrossRef]
- Choi, H.; Jung, P.G.; Jung, K.; Kong, K. Design and fabrication of a soft three-axis force sensor based on radially symmetric pneumatic chambers. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5519–5524. [Google Scholar]
- Kong, K.; Tomizuka, M. A gait monitoring system based on air pressure sensors embedded in a shoe. IEEE/ASME Trans. Mechatron. 2009, 14, 358–370. [Google Scholar] [CrossRef]
- Abinaya, B.; Latha, V.; Suchetha, M. An advanced gait monitoring system based on air pressure sensor embedded in a shoe. Procedia Eng. 2012, 38, 1634–1643. [Google Scholar] [CrossRef]
- Nozawa, H.; Lee, S.; Kim, J.-I.; Inoue, K. Human-robot cooperation for heavy object manipulation based on sensing pneumatic pressure in air cushions. In Proceedings of the 2012 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Kachsiung, Taiwan, 11–14 July 2012; pp. 391–396. [Google Scholar]
- Edin, B.B.; Ascari, L.; Beccai, L.; Roccella, S.; Cabibihan, J.J.; Carrozza, MC. Bio-inspired sensorization of a biomechatronic robot hand for the grasp-and-lift task. Brain Res. Bull. 2008, 75, 785–795. [Google Scholar] [CrossRef] [PubMed]
- Lin, C.H.; Erickson, T.W.; Fishel, J.A.; Wettels, N.; Loeb, G.E. Signal processing and fabrication of a biomimetic tactile sensor array with thermal, force and microvibration modalities. In Proceedings of the IEEE International Conference of Robotics and Biomimetics, Guilin, China, 19–23 December 2009; pp. 129–134. [Google Scholar]
- Alves de Oliveira, T.E.; Cretu, A.M.; Petriu, E. Multimodal bio-inspired tactile sensing module for surface characterization. Sensors 2017, 17, 1187. [Google Scholar] [CrossRef] [PubMed]
- Yang, H.; Chen, Y.; Sun, Y.; Hao, L. A novel pneumatic soft sensor for measuring contact force and curvature of a soft gripper. Sens. Actuators A Phys. 2017, 266, 318–327. [Google Scholar] [CrossRef]
- Yamazaki, H.; Nishiyama, M.; Watanabe, K. A fiber-optic mechanoreceptor in a finger-shaped end effector for human-like tactile sensing. IEEE Sens. J. 2017, 17, 5123–5129. [Google Scholar] [CrossRef]
- Hosoda, K.; Tada, Y.; Asada, M. Anthropomorphic robotic soft fingertip with randomly distributed receptors. Robot. Auton. Syst. 2006, 54, 104–109. [Google Scholar] [CrossRef]
- Sato, K.; Kamiyama, K.; Kawakami, N.; Tachi, S. Finger-shaped GelForce: Sensor for measuring surface traction fields for robotic hand. IEEE Trans. Haptics 2010, 3, 37–47. [Google Scholar] [CrossRef] [PubMed]
- Koiva, R.; Zenker, M.; Schurmann, C.; Haschke, R.; Ritter, H.J. A highly sensitive 3d-shaped tactile sensor. In Proceedings of the 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Wollongong, Australia, 9–12 July 2013; pp. 1084–1089. [Google Scholar] [CrossRef]
- Nishimura, T.; Fujihira, Y.; Adachi, R.; Watanabe, T. New condition for tofu stable grasping with fluid fingertips. In Proceedings of the 2016 IEEE International Conference on Automation Science and Engineering (CASE), Fort Worth, TX, USA, 21–25 August 2016; pp. 335–341. [Google Scholar]
- MPXV5050 Datasheet, Freescale Semiconductor, Inc. Available online: https://www.nxp.com/docs/en/data-sheet/MPX5050.pdf (accessed on 10 September 2017).
- Zhang, Y.; Duan, X.G.; Zhong, G.; Deng, H. Initial slip detection and its application in biomimetic robotic hands. IEEE Sens. J. 2016, 16, 7073–7080. [Google Scholar] [CrossRef]
- Birznieks, I.; Burstedt, M.K.; Edin, B.B.; Johansson, R.S. Mechanisms for force adjustments to unpredictable frictional changes at individual digits during two-fingered manipulation. J. Neurophysiol. 1998, 80, 1989–2002. [Google Scholar] [PubMed]



© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gong, D.; He, R.; Yu, J.; Zuo, G. A Pneumatic Tactile Sensor for Co-Operative Robots. Sensors 2017, 17, 2592. https://doi.org/10.3390/s17112592
Gong D, He R, Yu J, Zuo G. A Pneumatic Tactile Sensor for Co-Operative Robots. Sensors. 2017; 17(11):2592. https://doi.org/10.3390/s17112592
Chicago/Turabian StyleGong, Daoxiong, Rui He, Jianjun Yu, and Guoyu Zuo. 2017. "A Pneumatic Tactile Sensor for Co-Operative Robots" Sensors 17, no. 11: 2592. https://doi.org/10.3390/s17112592