Tightly-Coupled Integration of Multi-GNSS Single-Frequency RTK and MEMS-IMU for Enhanced Positioning Performance

Abstract
:1. Introduction
2. Multi-GNSS SF-RTK Model
3. INS Aided Ambiguity Resolution Strategy
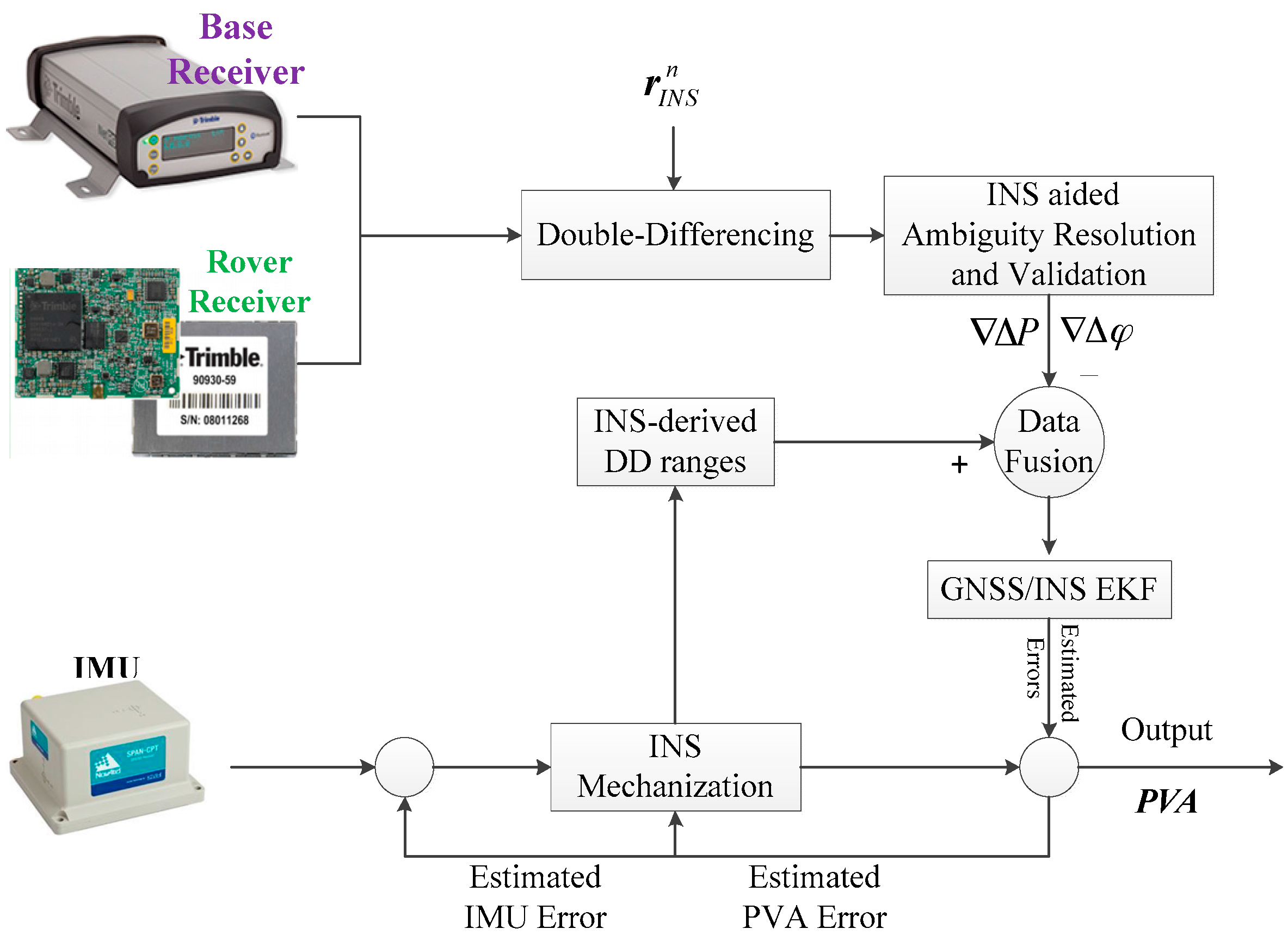
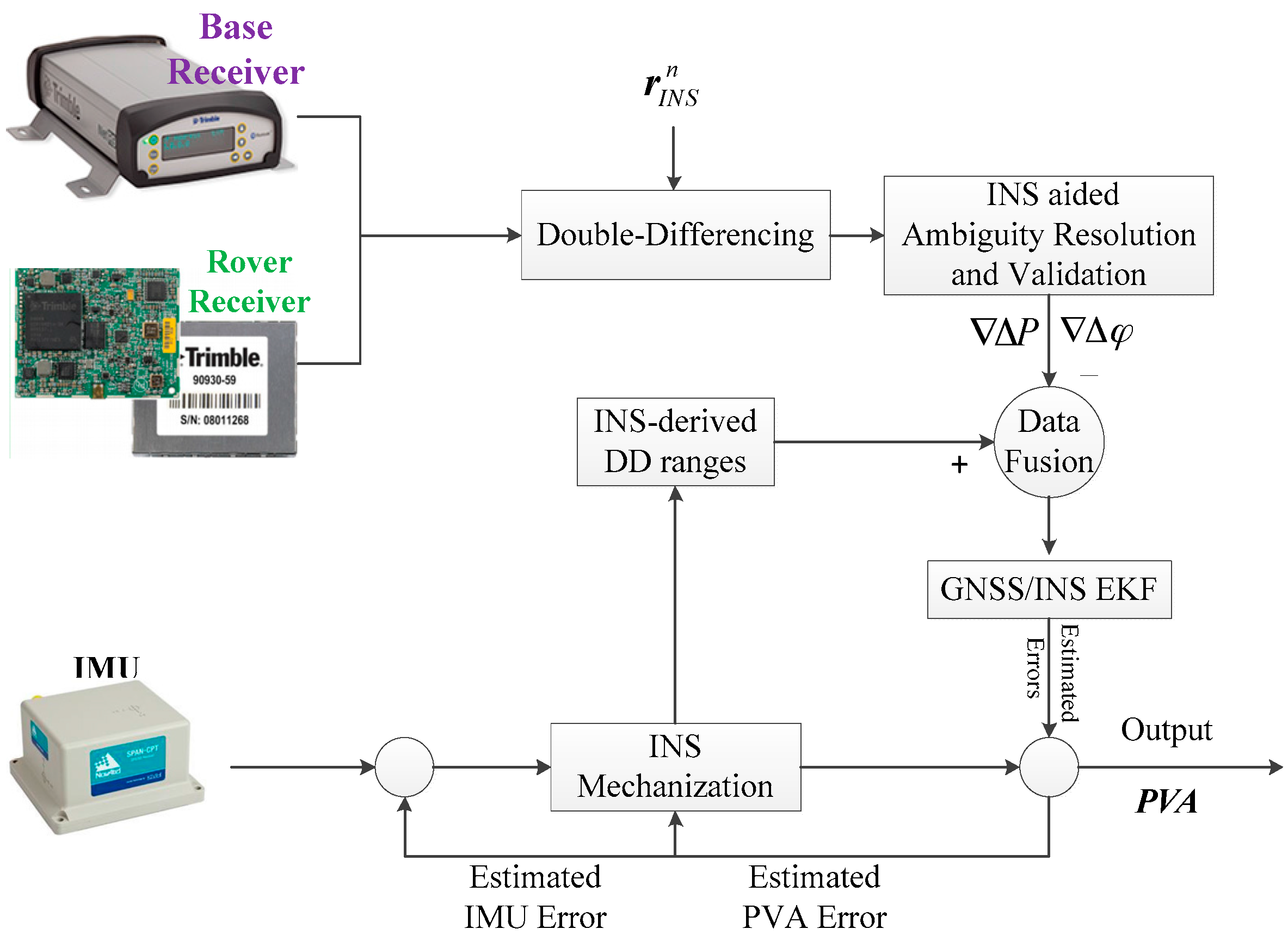
4. Implementation of Tightly-Coupled Multi-GNSS SF-RTK/INS Integration
4.1. INS Danymical Model
4.2. IMU Sensor Uncertainty Model
4.3. Multi-GNSS SF-RTK/INS Measurement Model
5. Experimental Validation and Discussion
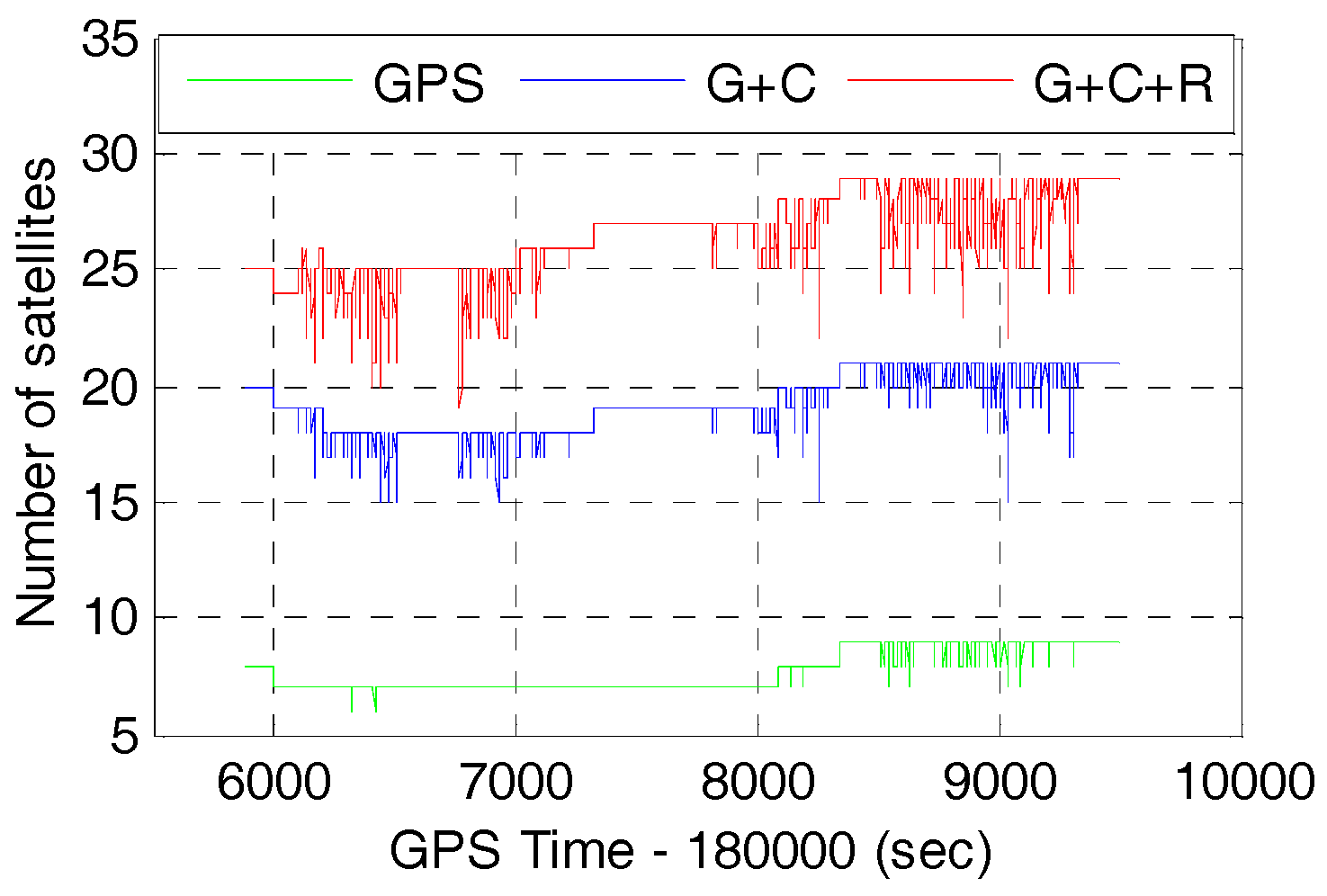
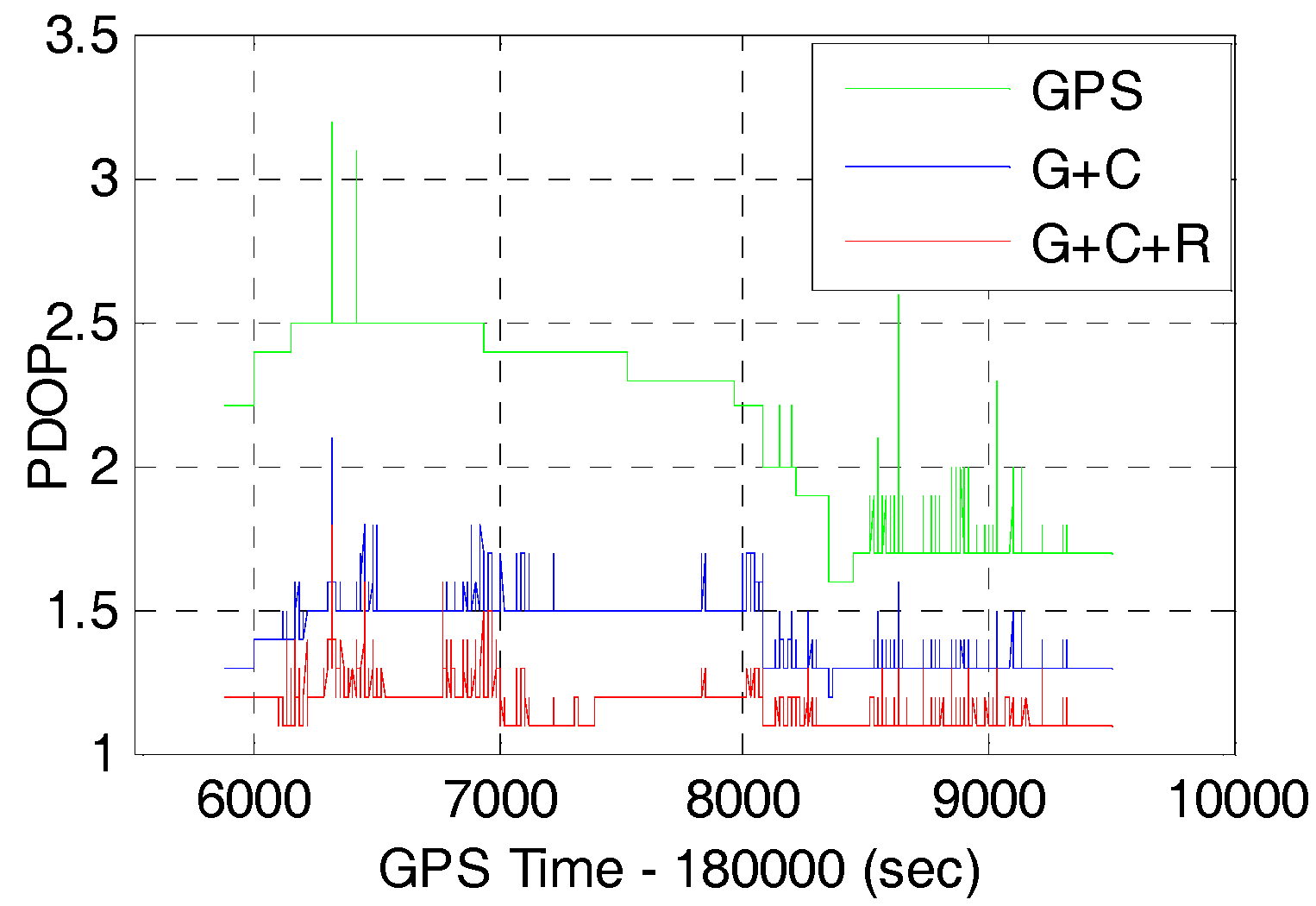
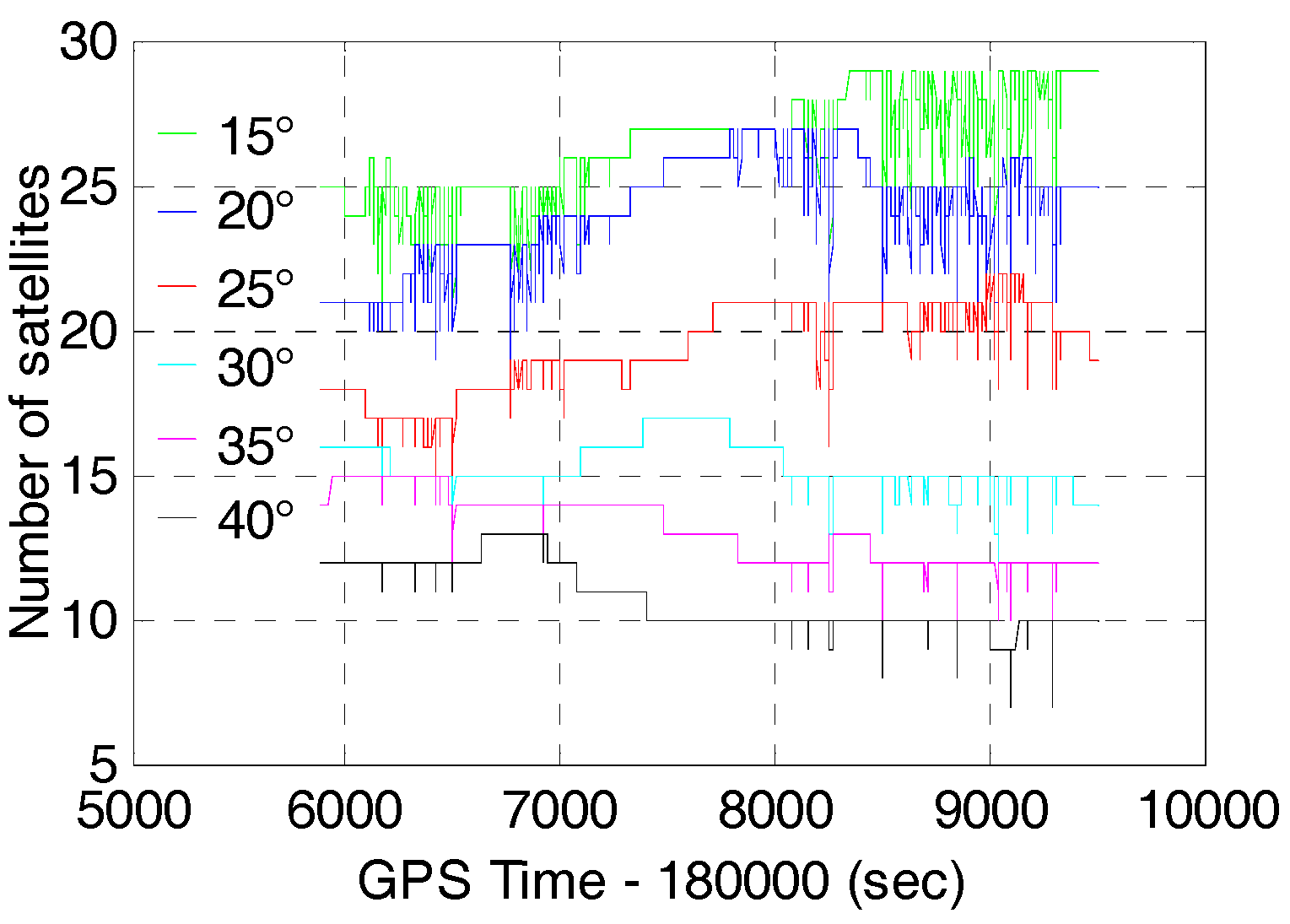
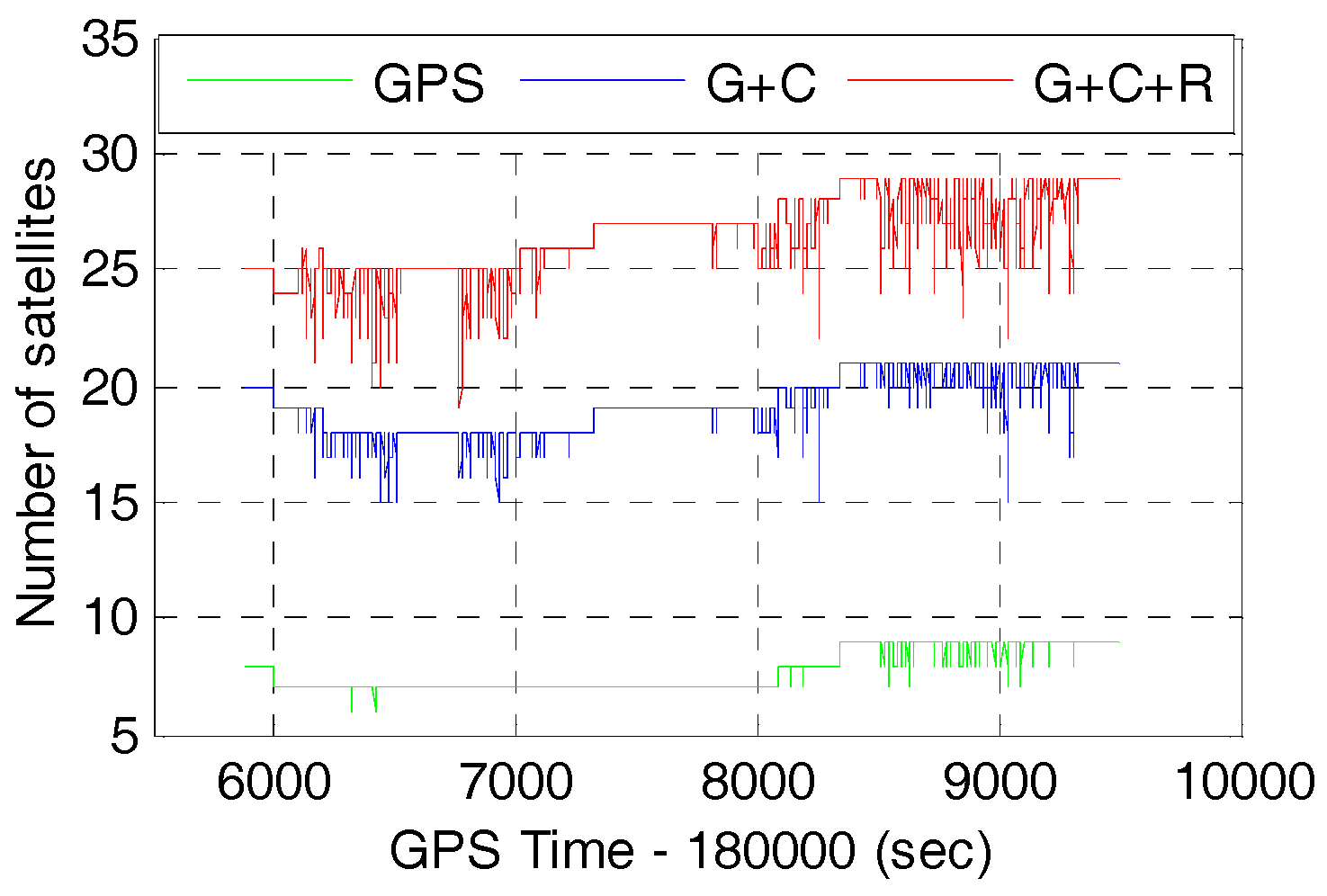
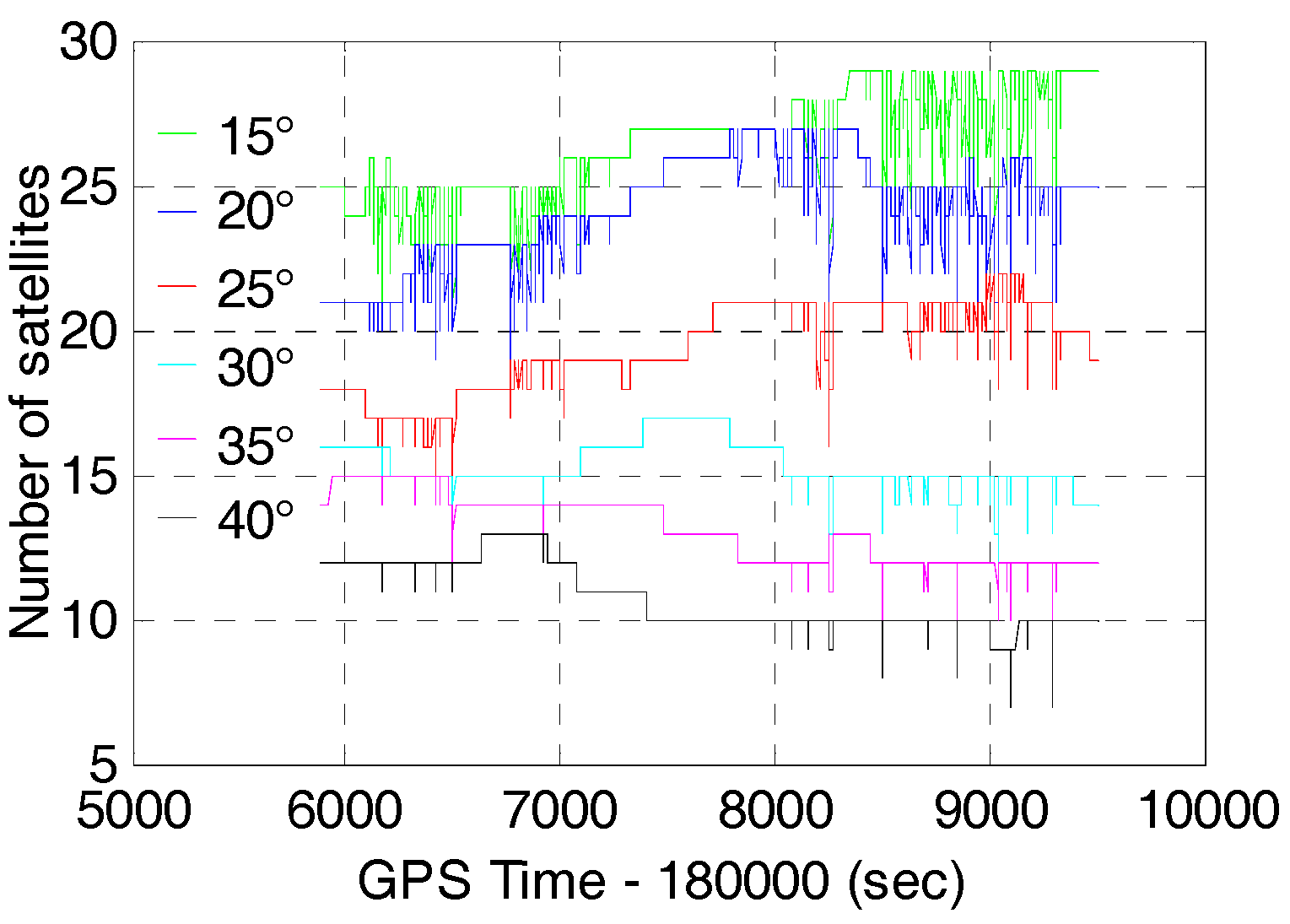
5.1. Satellite Availability and Position Dilution of Precision
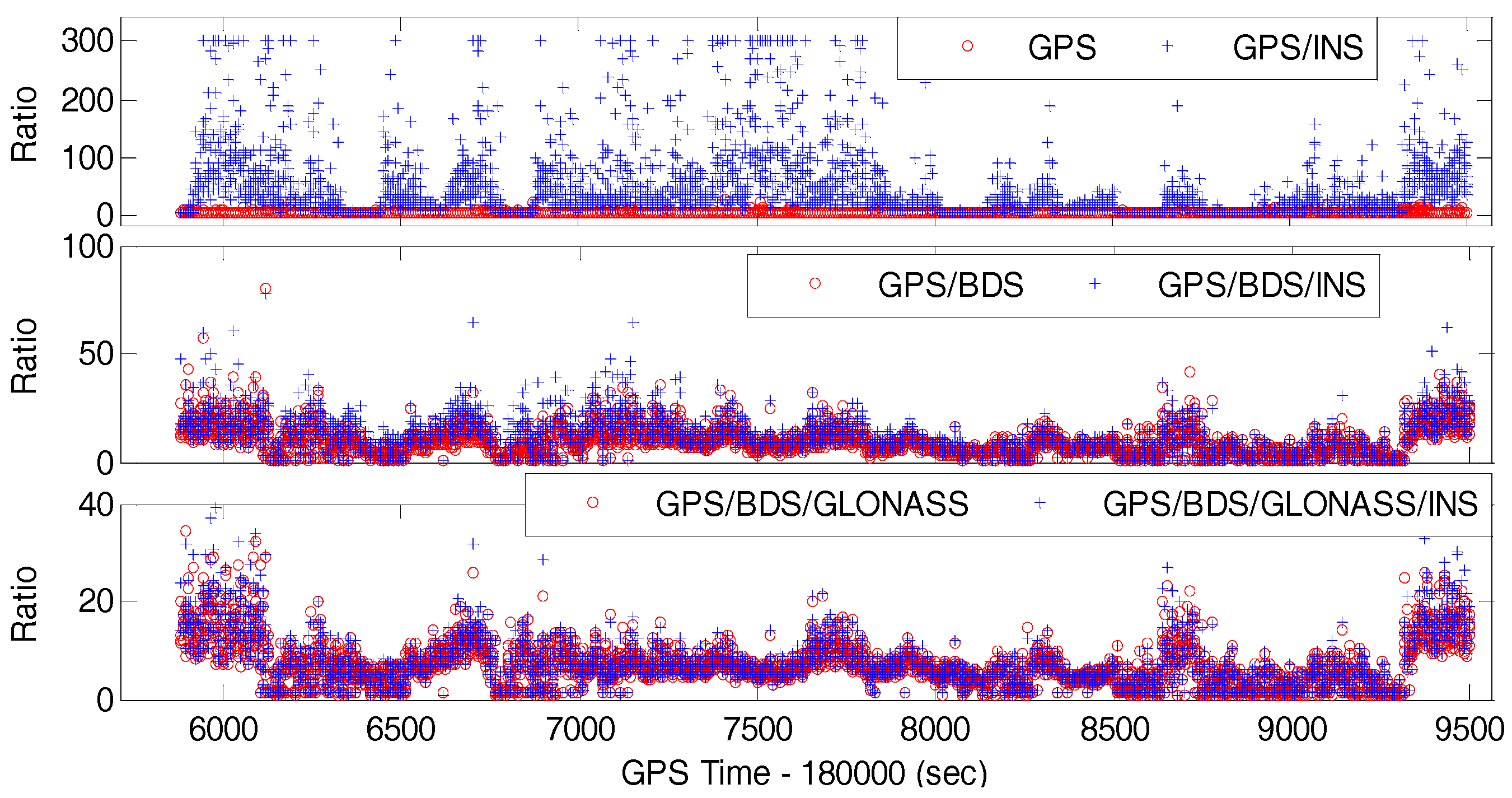
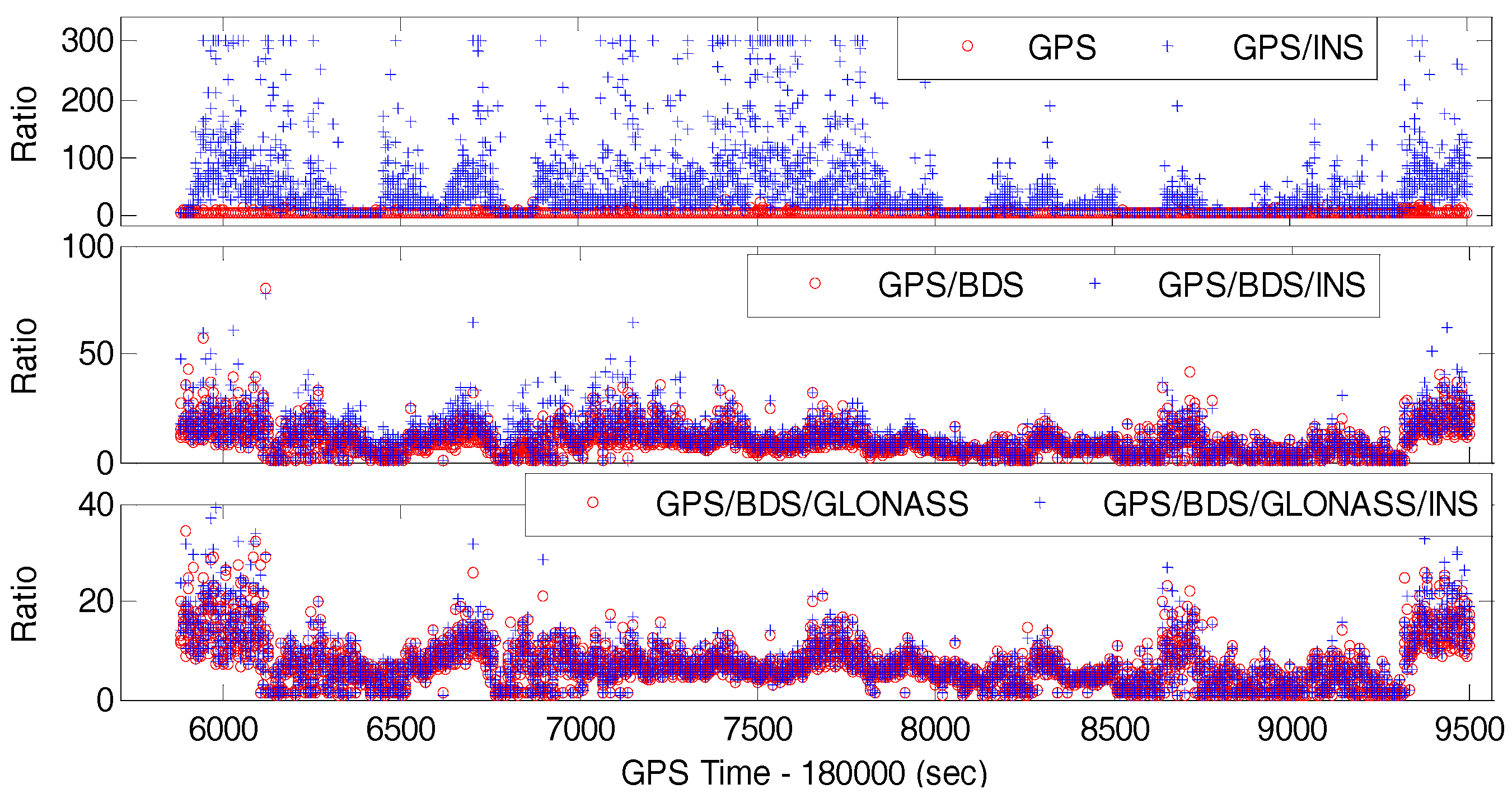
5.2. Single-Epoch AR Performance for Different System Configurations
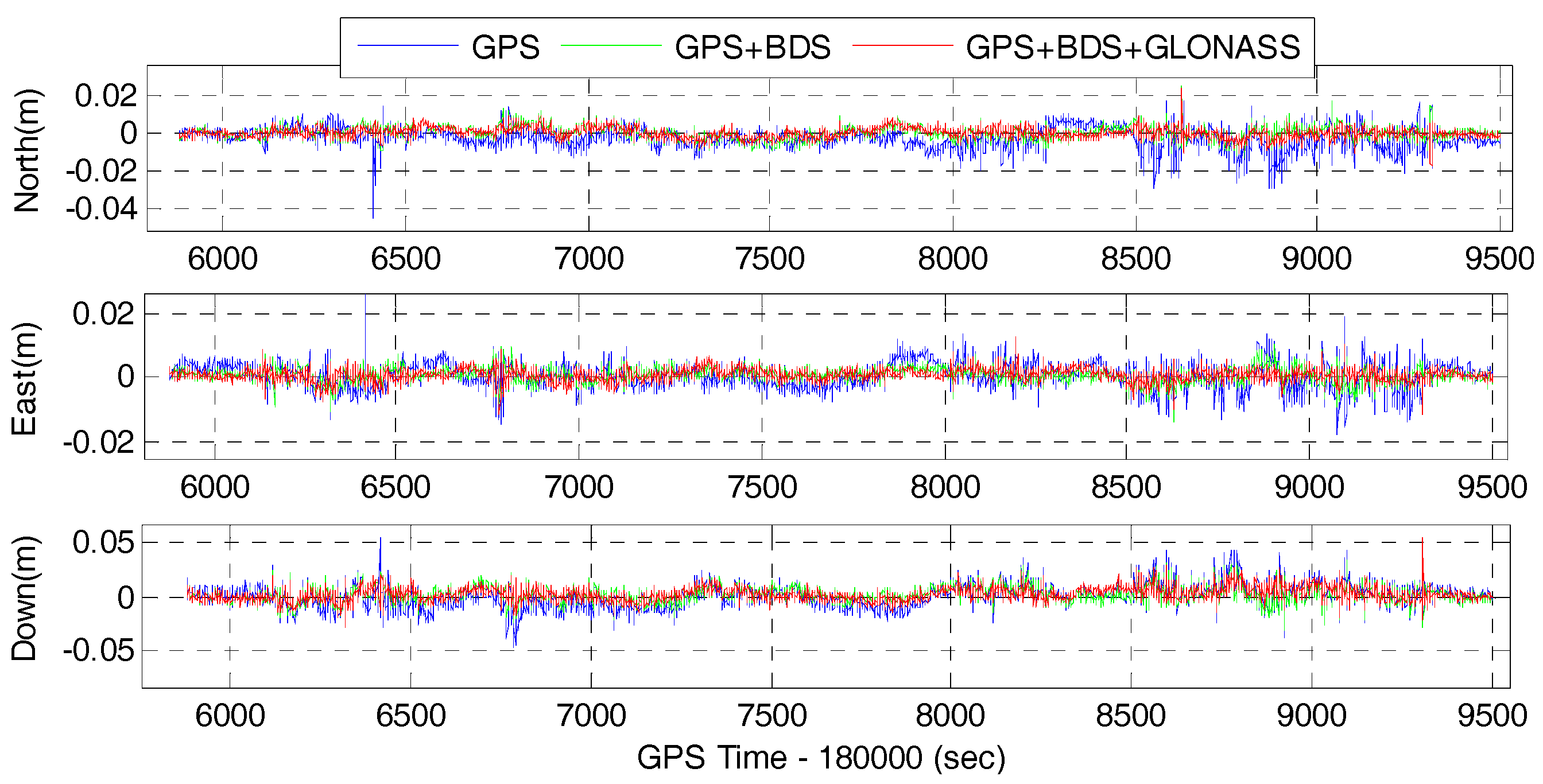
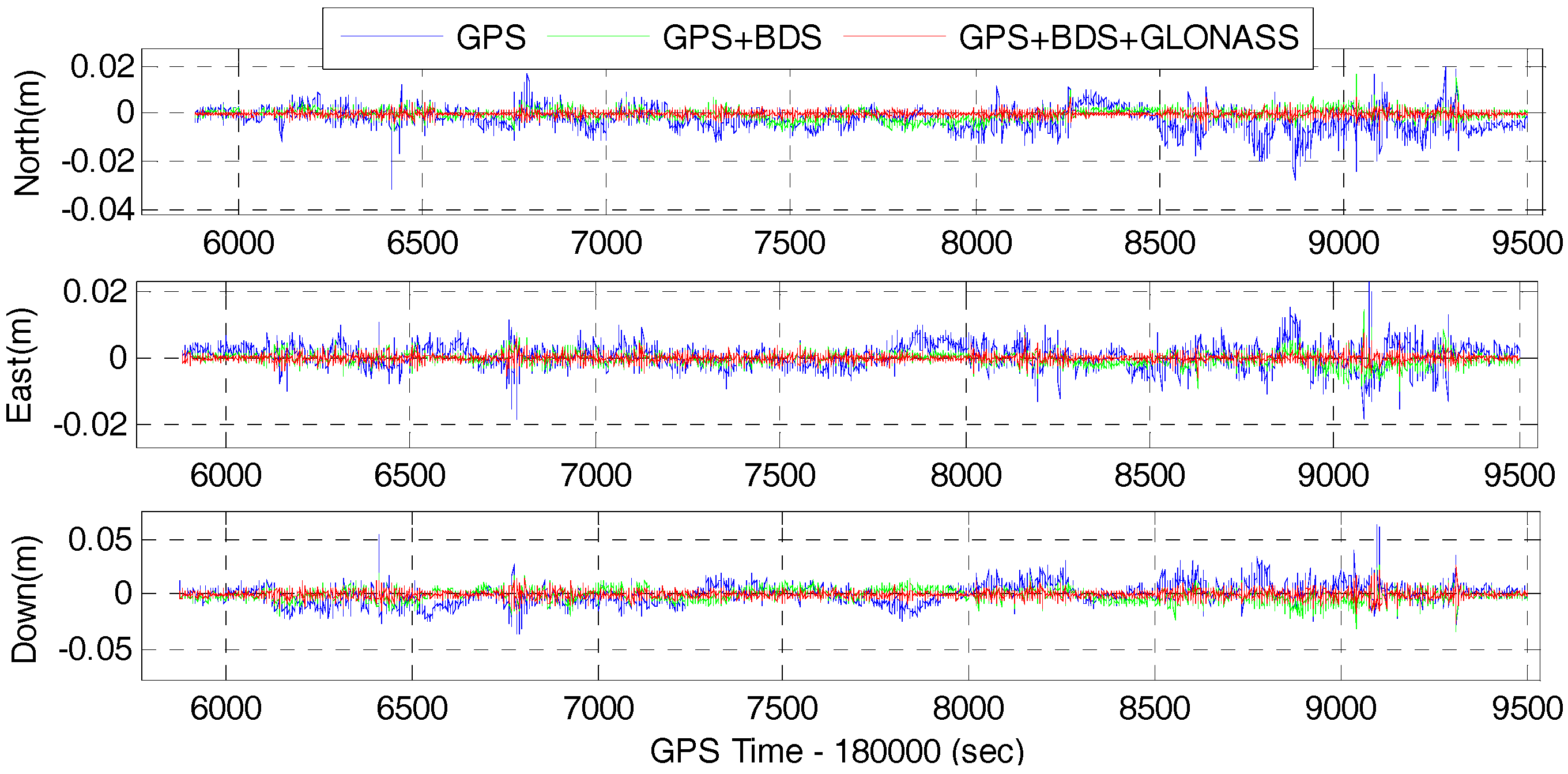
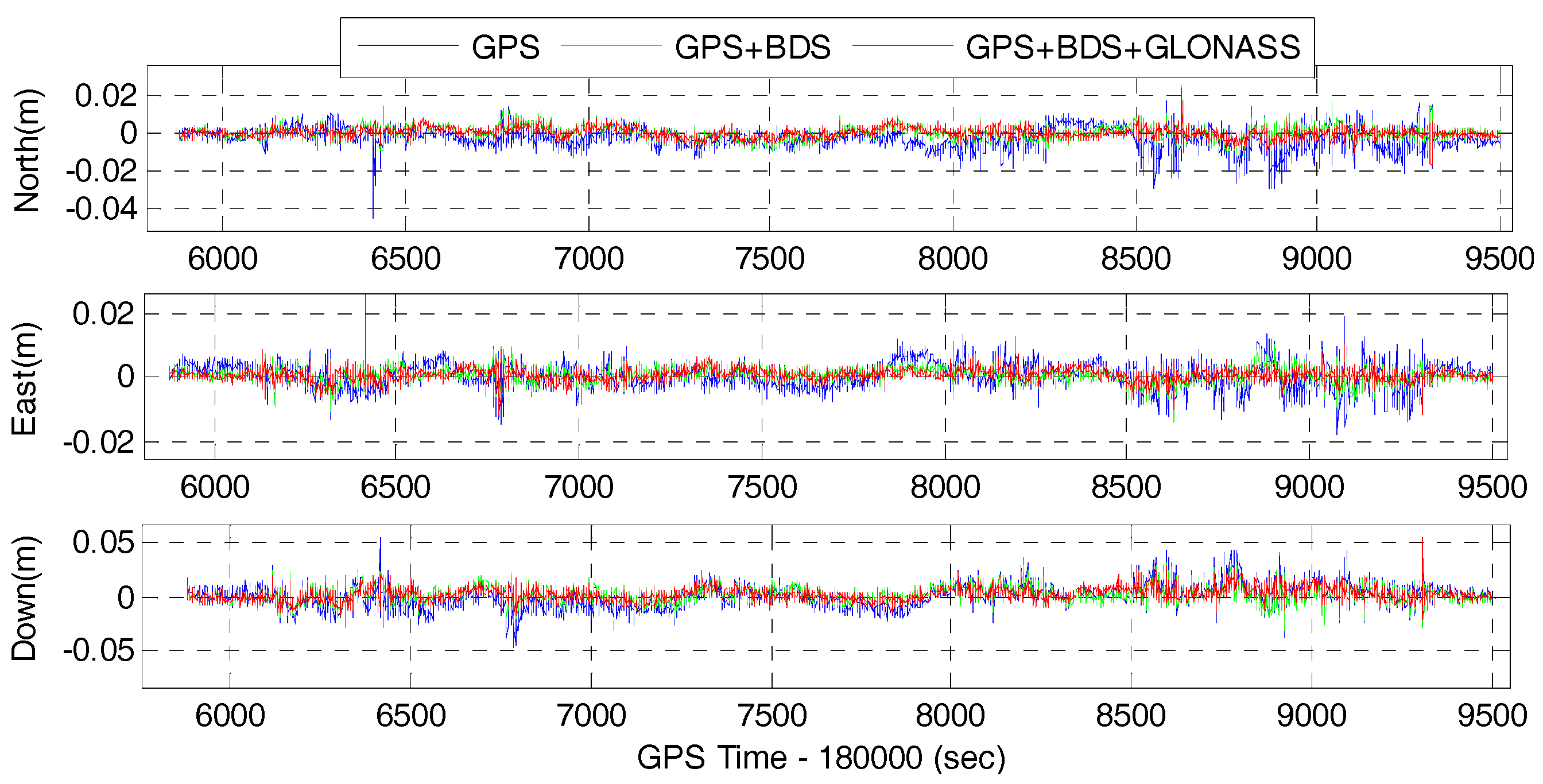
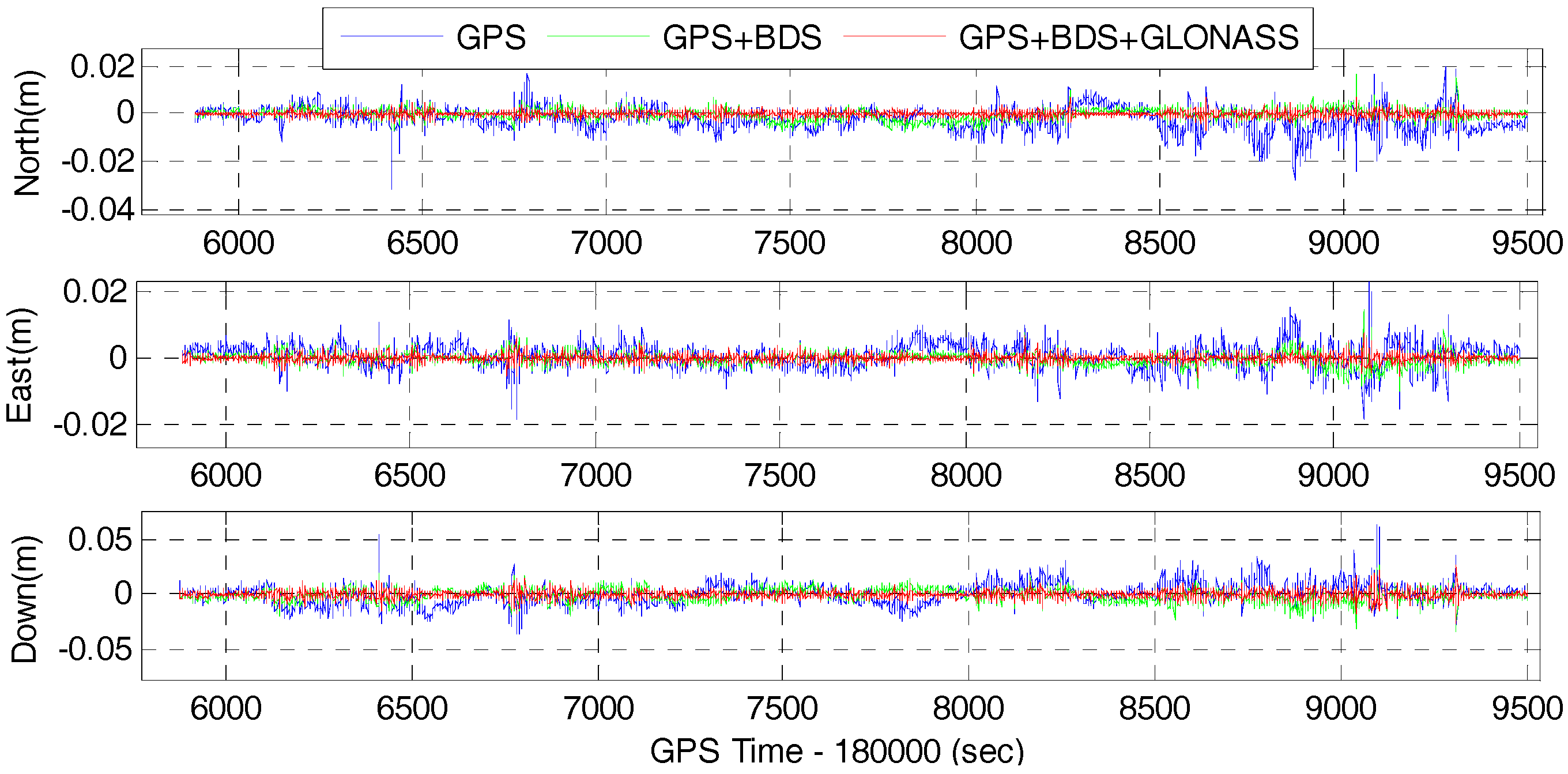
5.3. Positioning Performance of RTK and the Tightly-Coupled RTK/INS Integration
5.4. INS Bridging Capabilities During GNSS Outages
6. Conclusions
- (1)
- For the GPS-only system, single-frequency ambiguity resolution is not possible instantaneously in kinematic environment. In contrast, superior single-frequency AR performance can be obtained for multi-GNSS RTK with high empirical success rate (more than 90%) at 30° cut-off elevation angle. In addition, the AR performance and probability of fixing the integer ambiguities are further enhanced after the inclusion of the a priori position constraint from INS, especially in the case of the GPS-only system and higher elevation cut-off angles.
- (2)
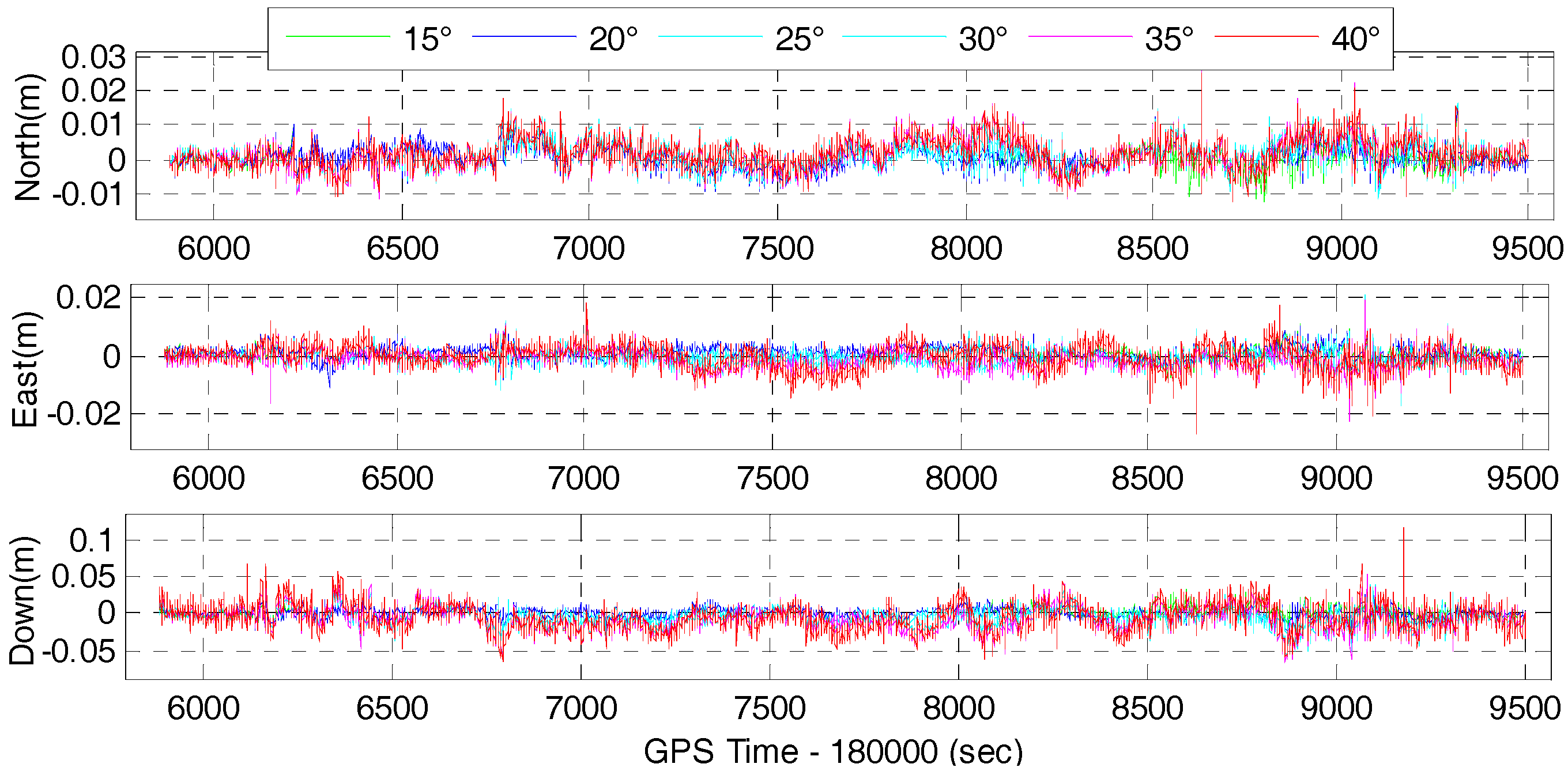
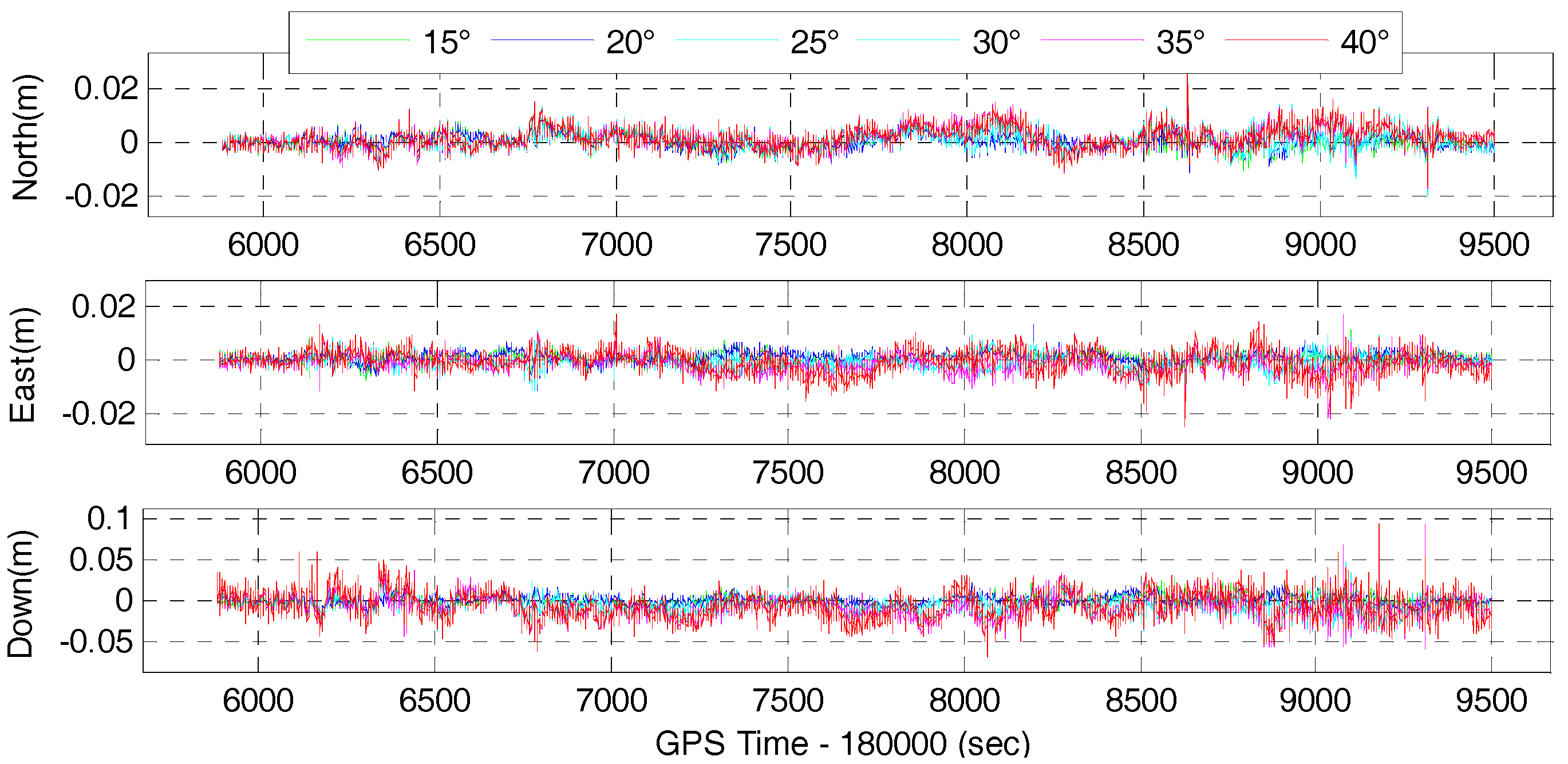
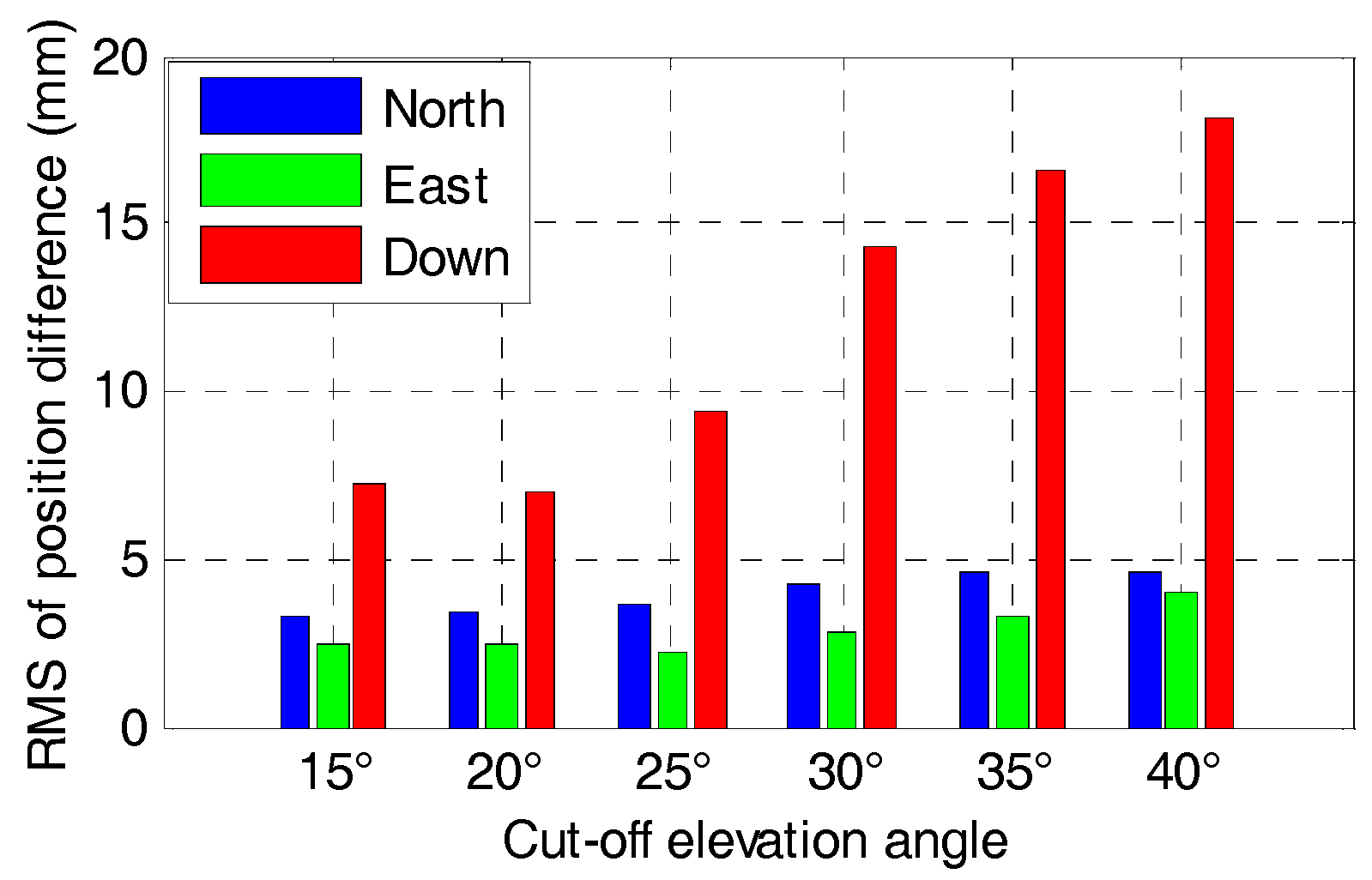
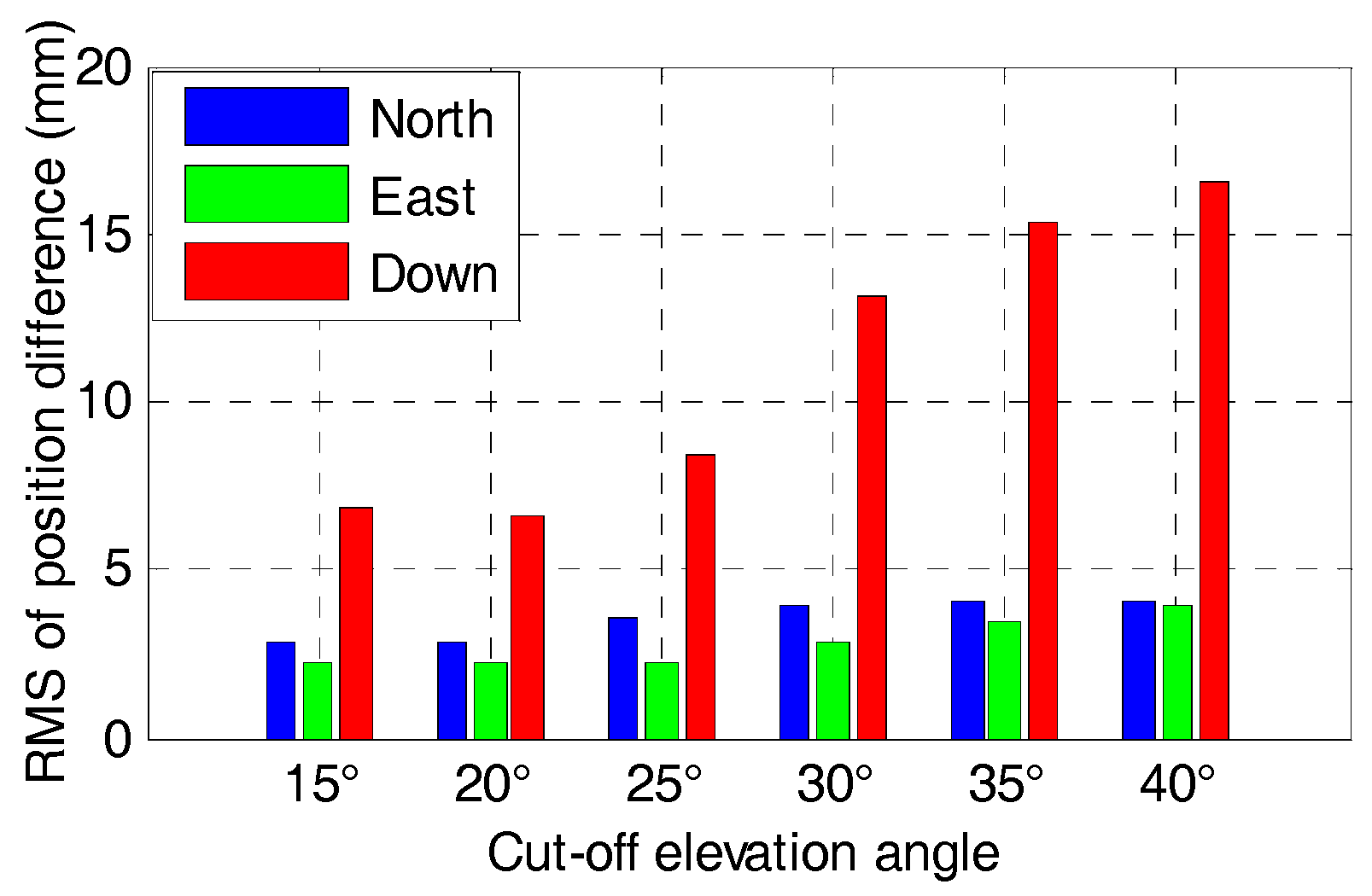
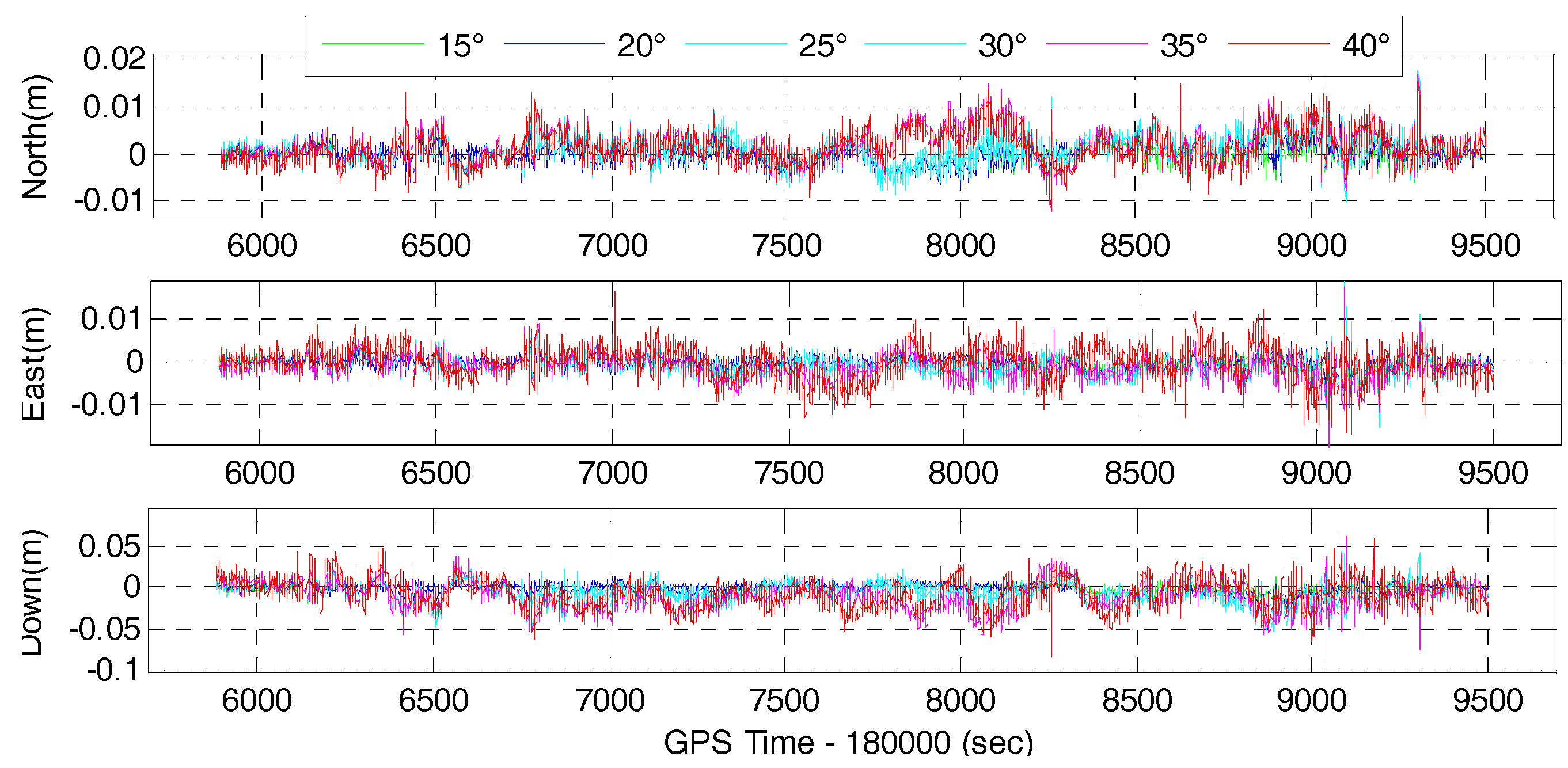
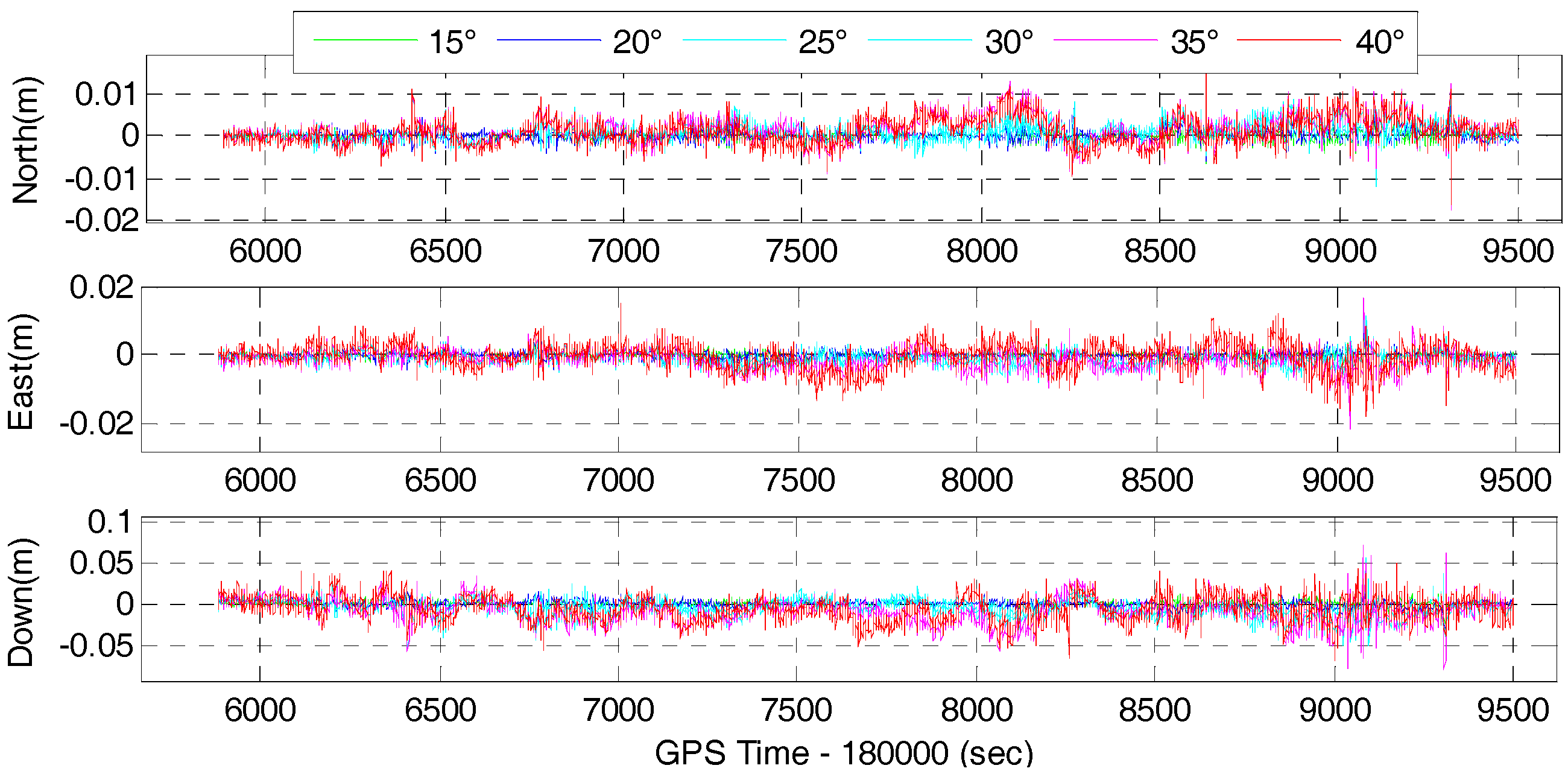
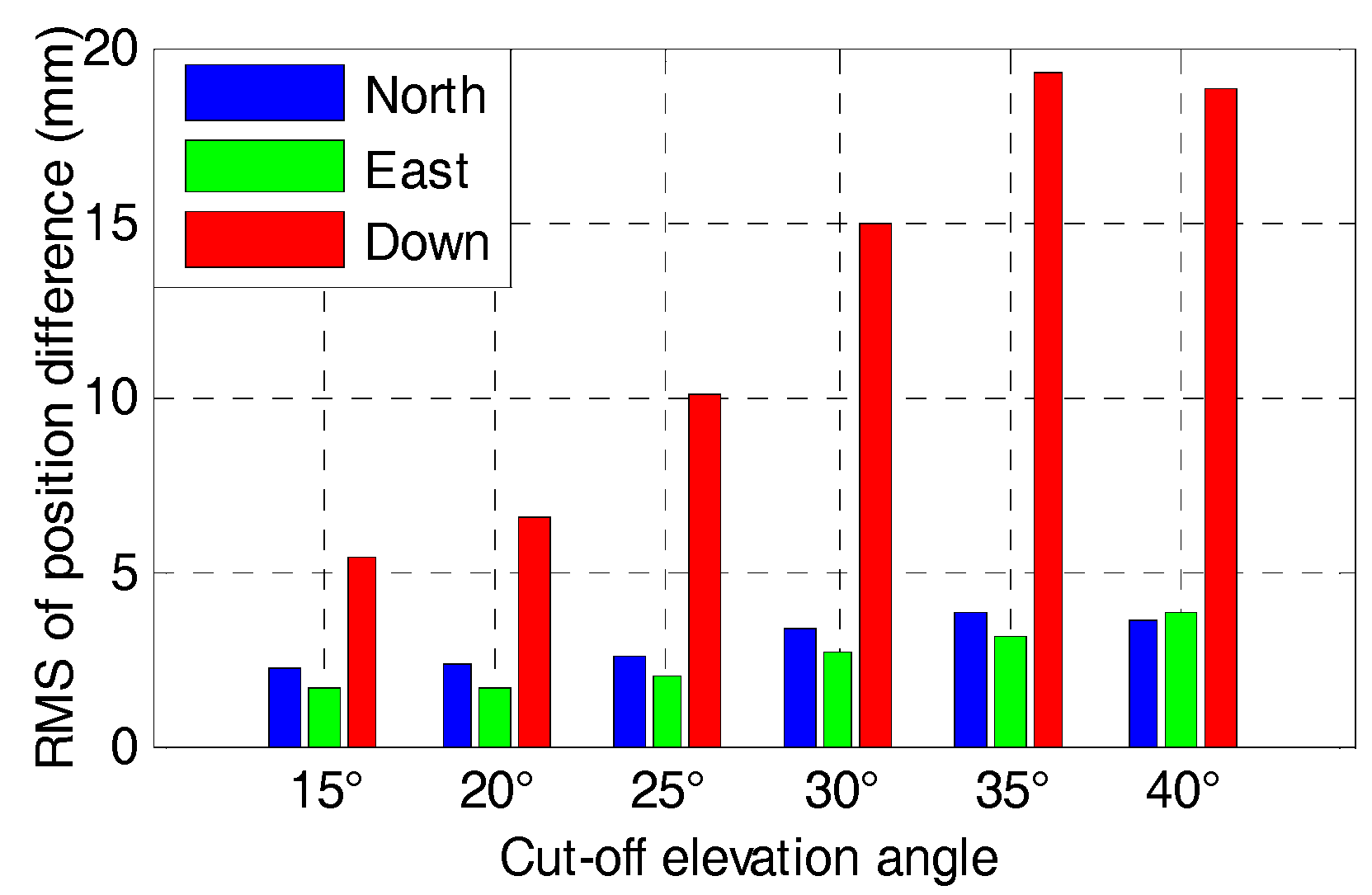
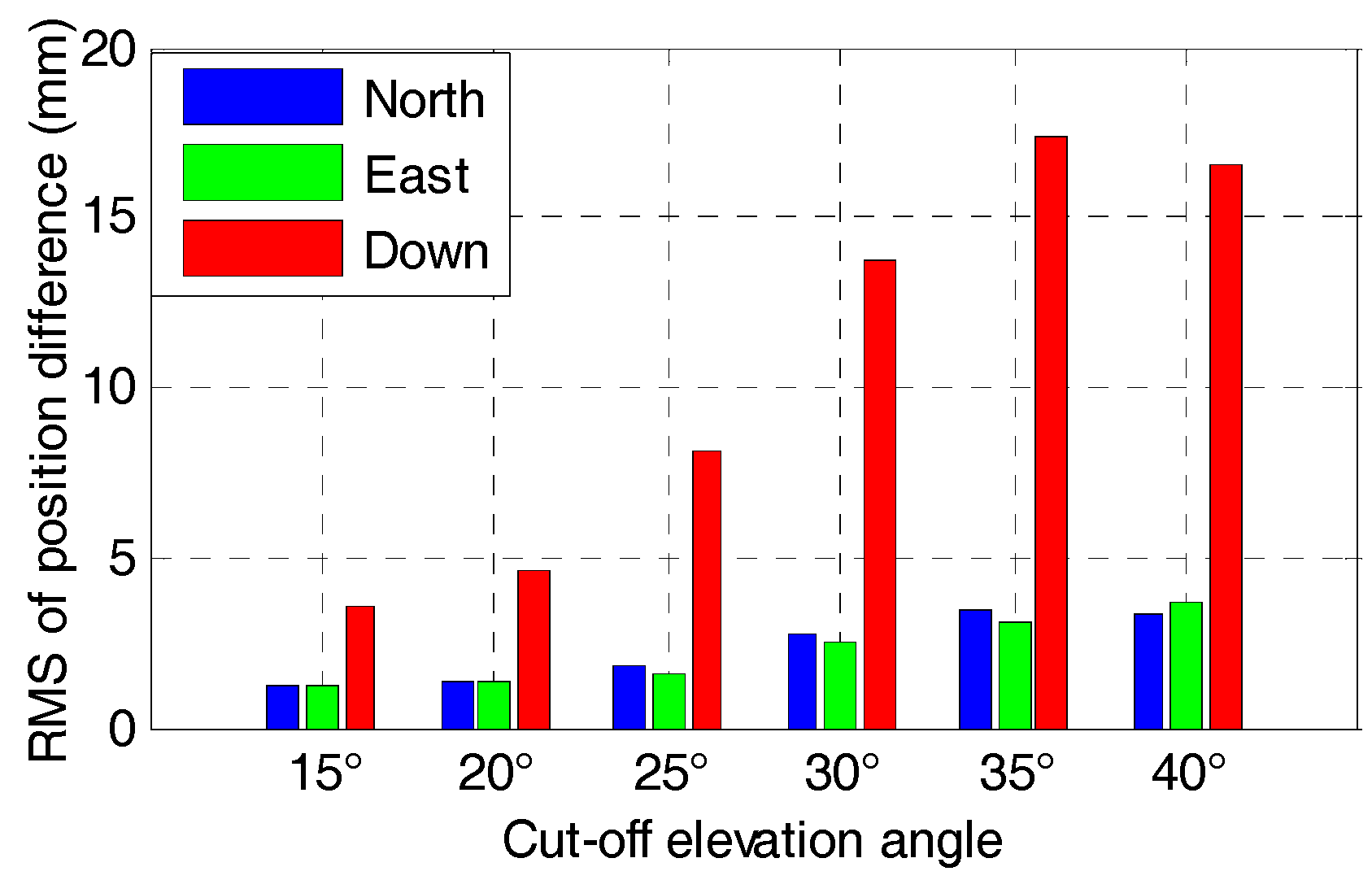
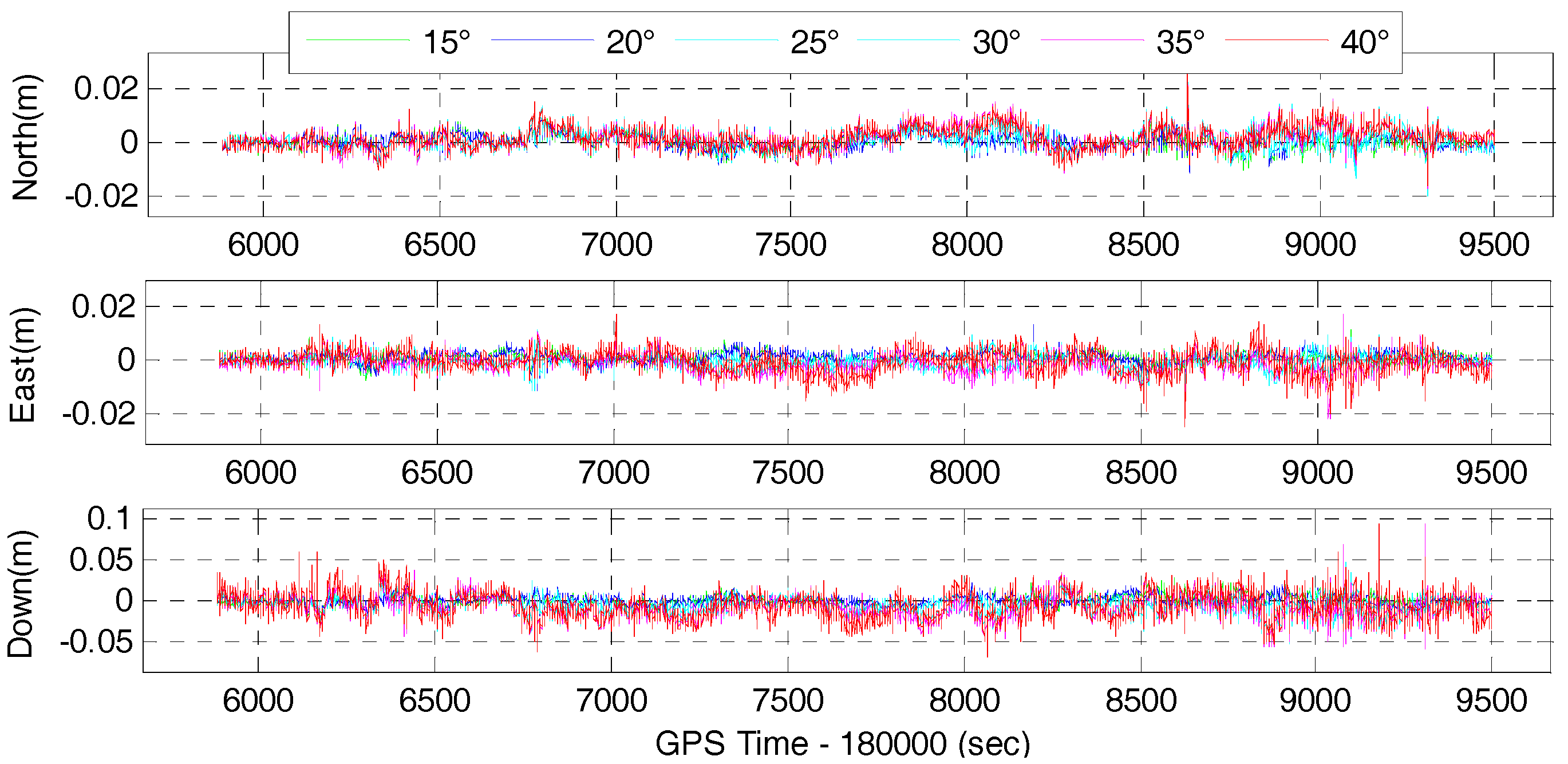
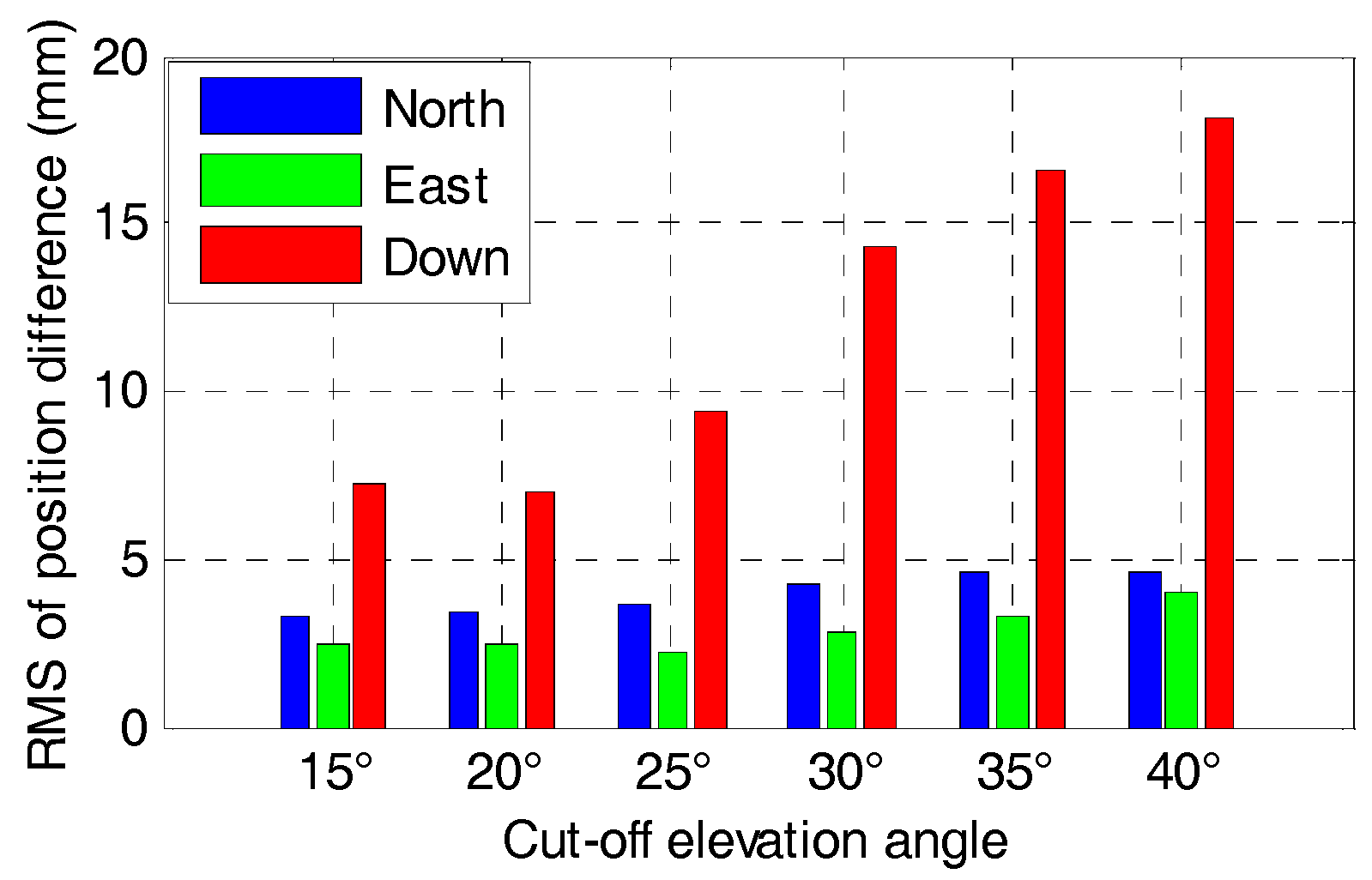
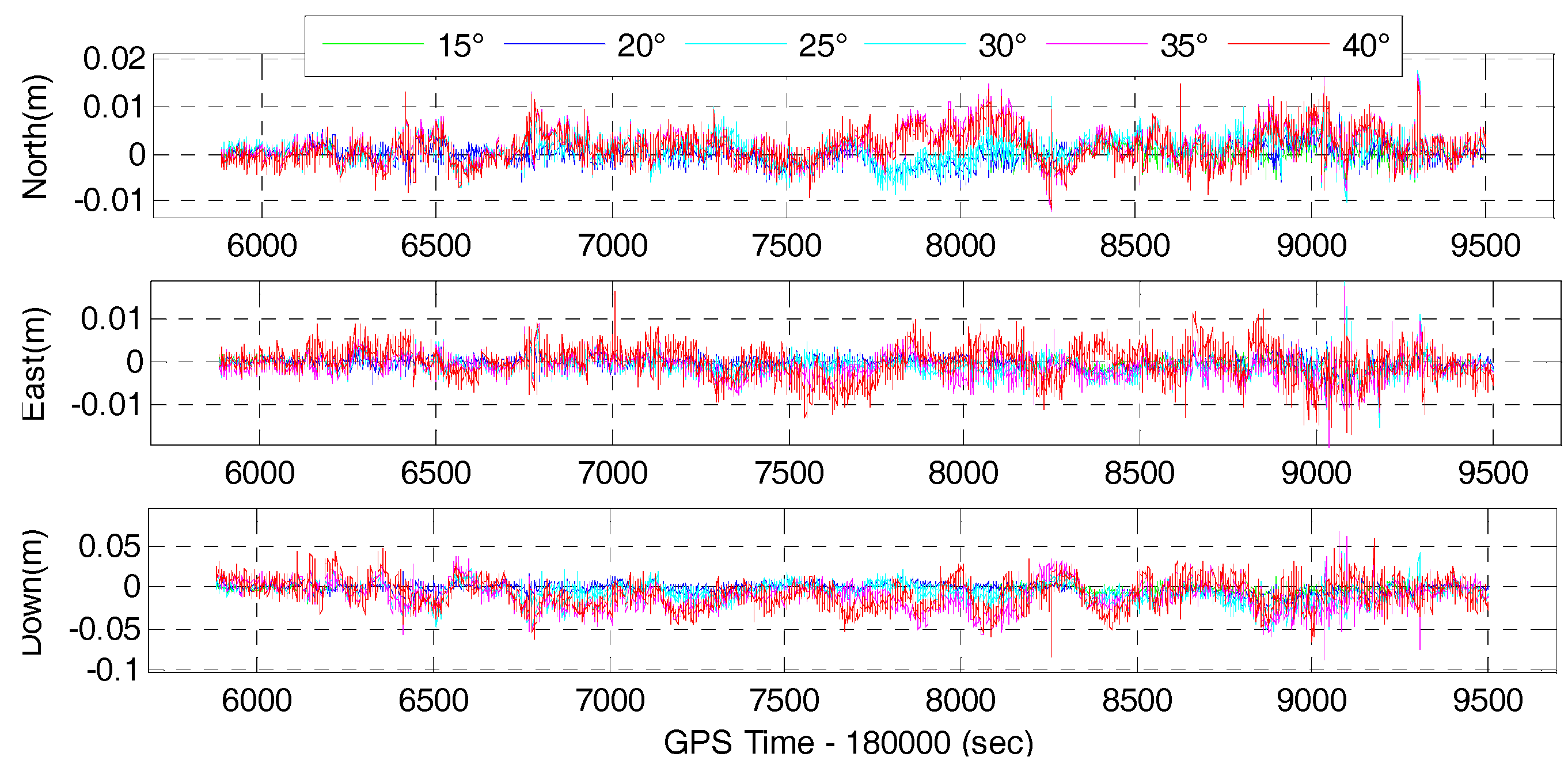
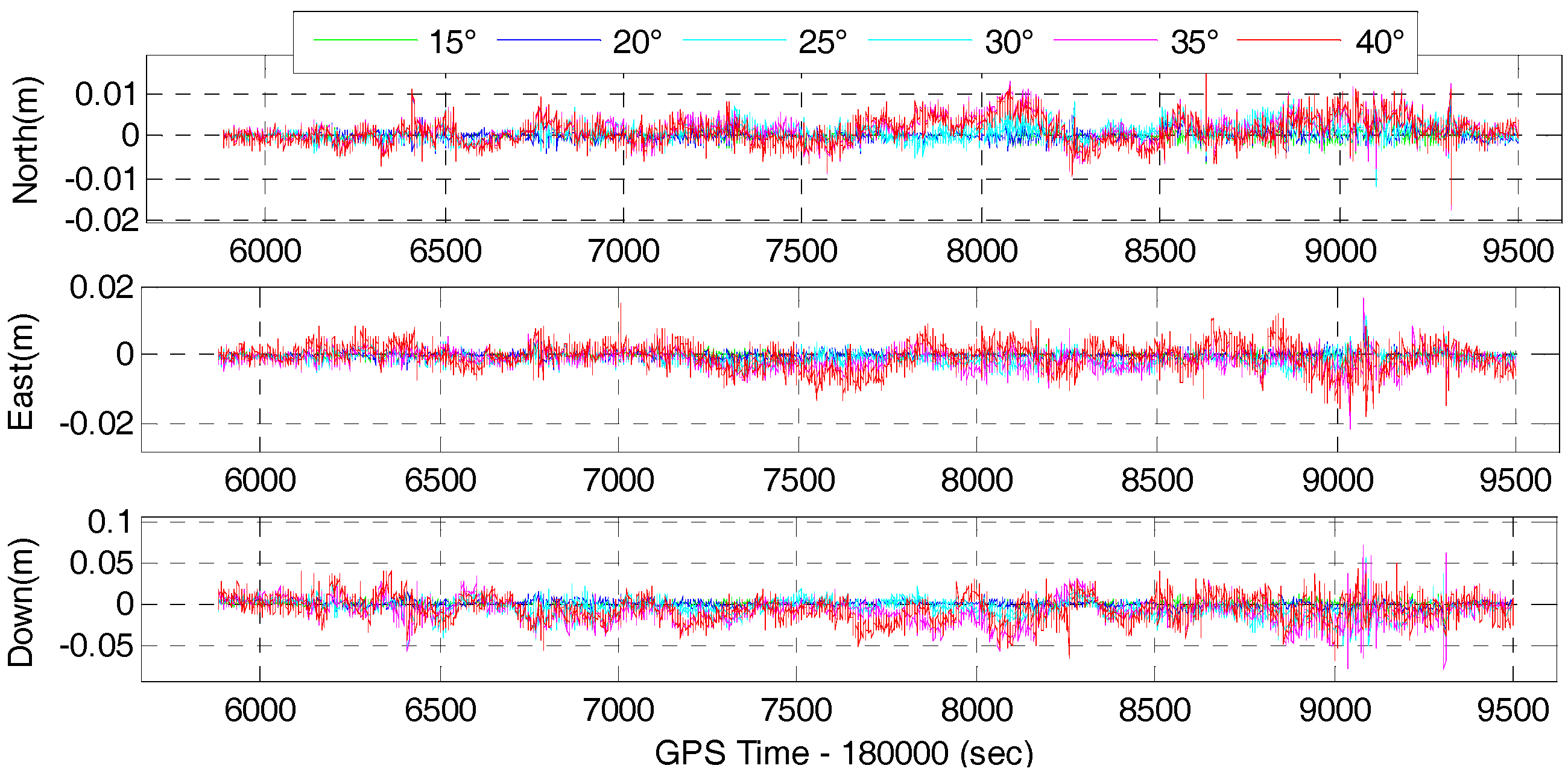
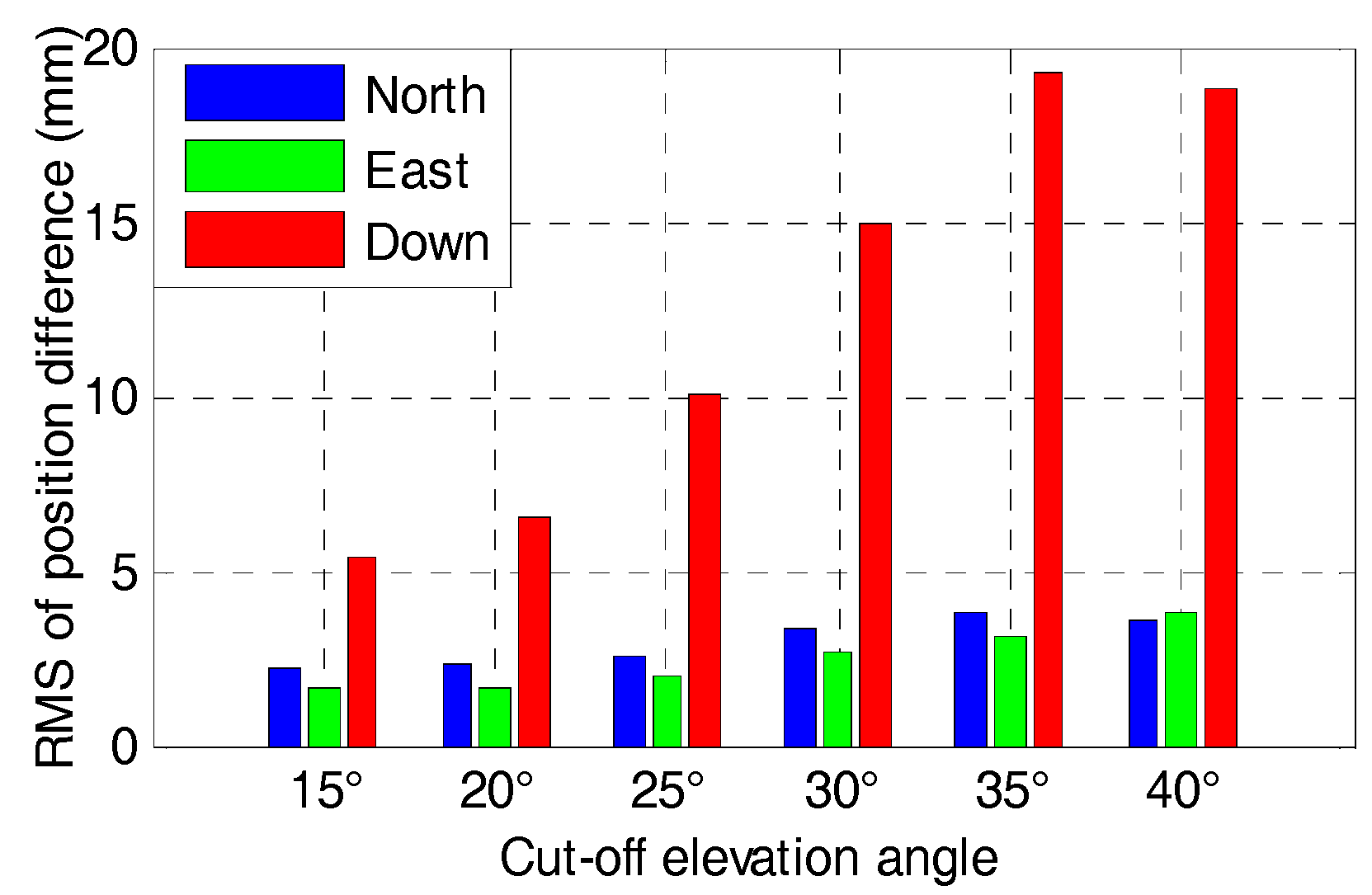
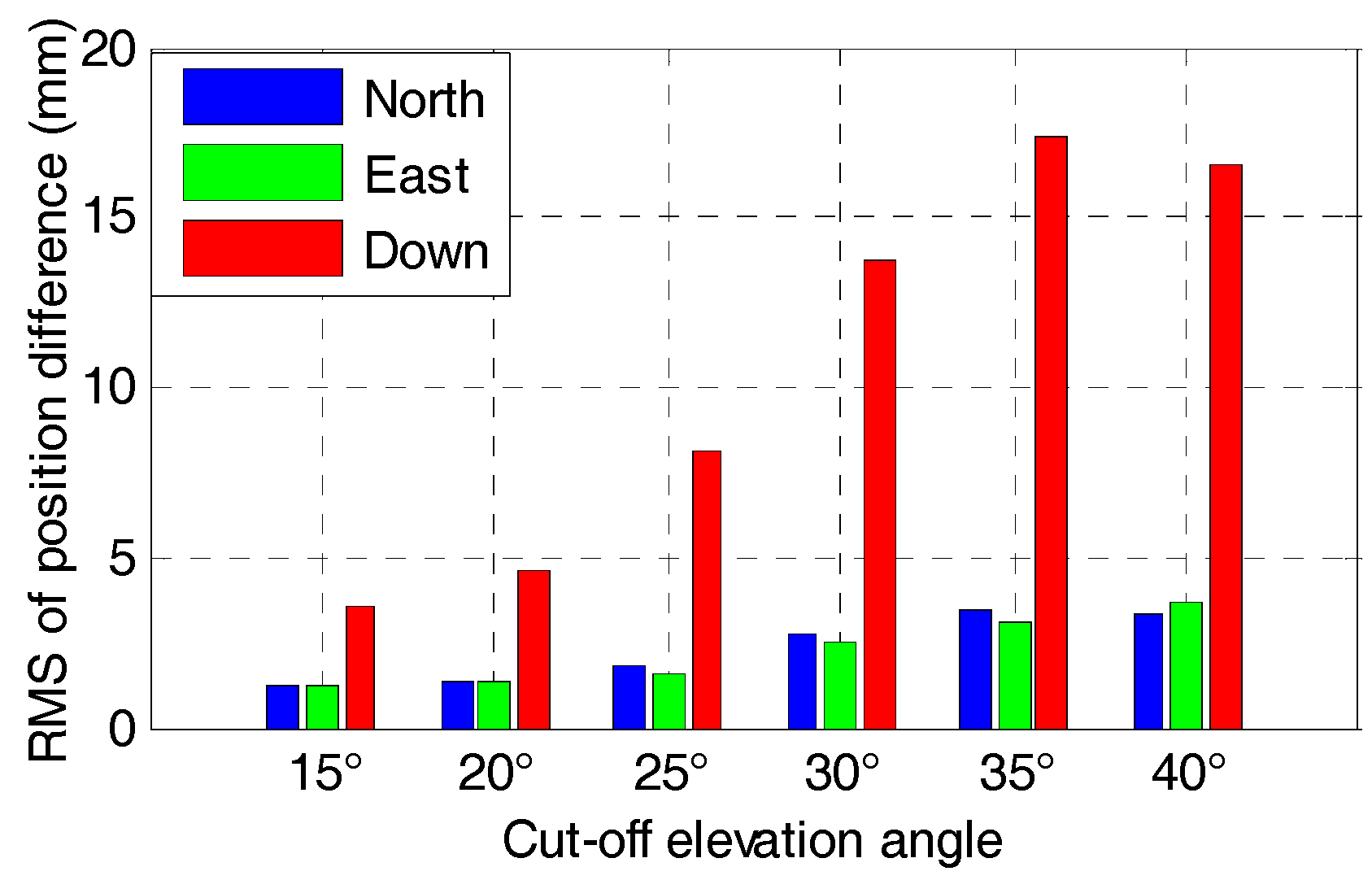
- The stability of the position time series and positioning RMS can be greatly improved by combining the multi-GNSS data and MEMS-IMU data. Besides, the position accuracy for multi-GNSS is only slightly degraded even if the elevation cut-off angle is set to 40°, especially for the horizontal components. Hence, continuous and high-accuracy positioning in constrained environment is feasible for single-frequency multi-GNSS users.
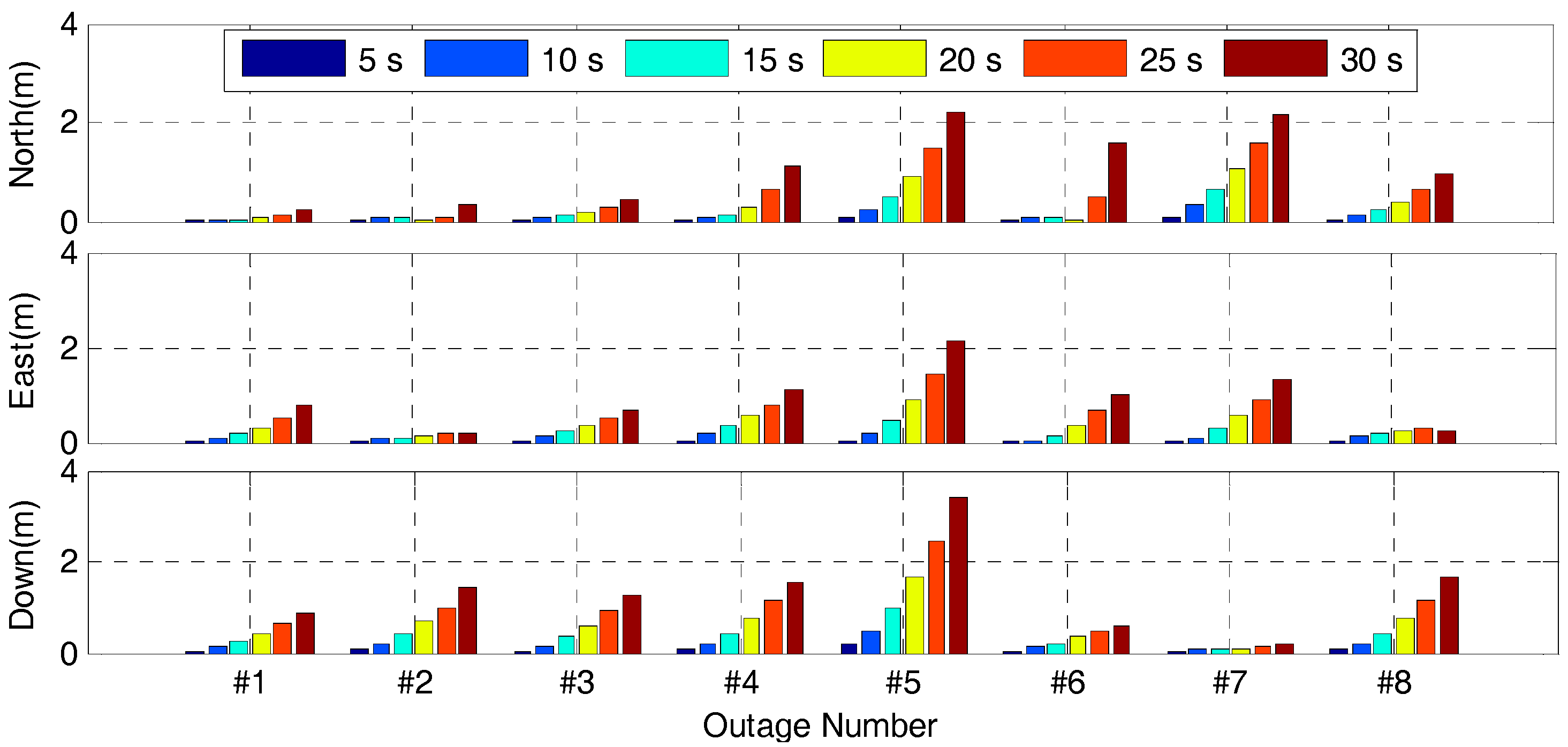
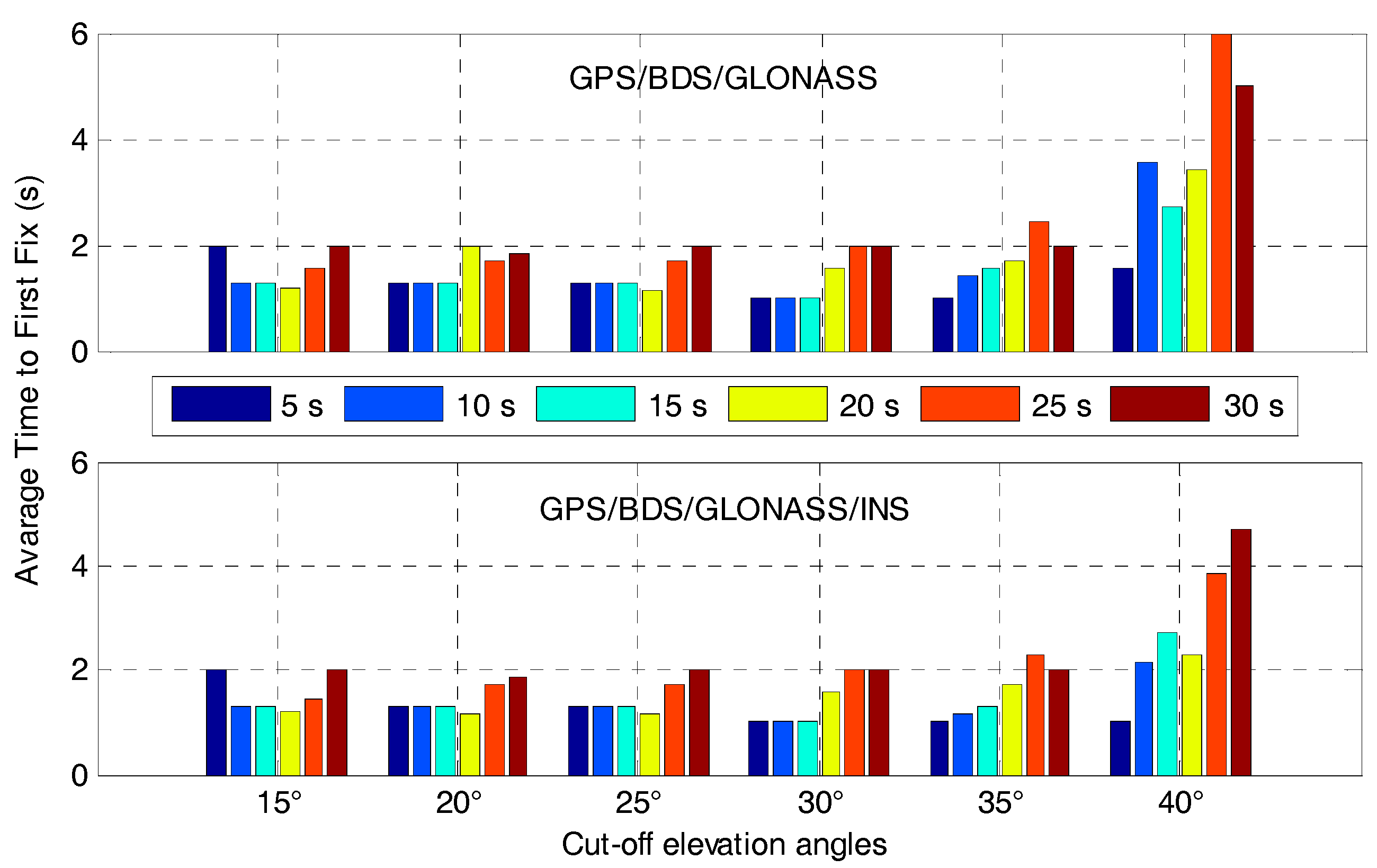
- (3)
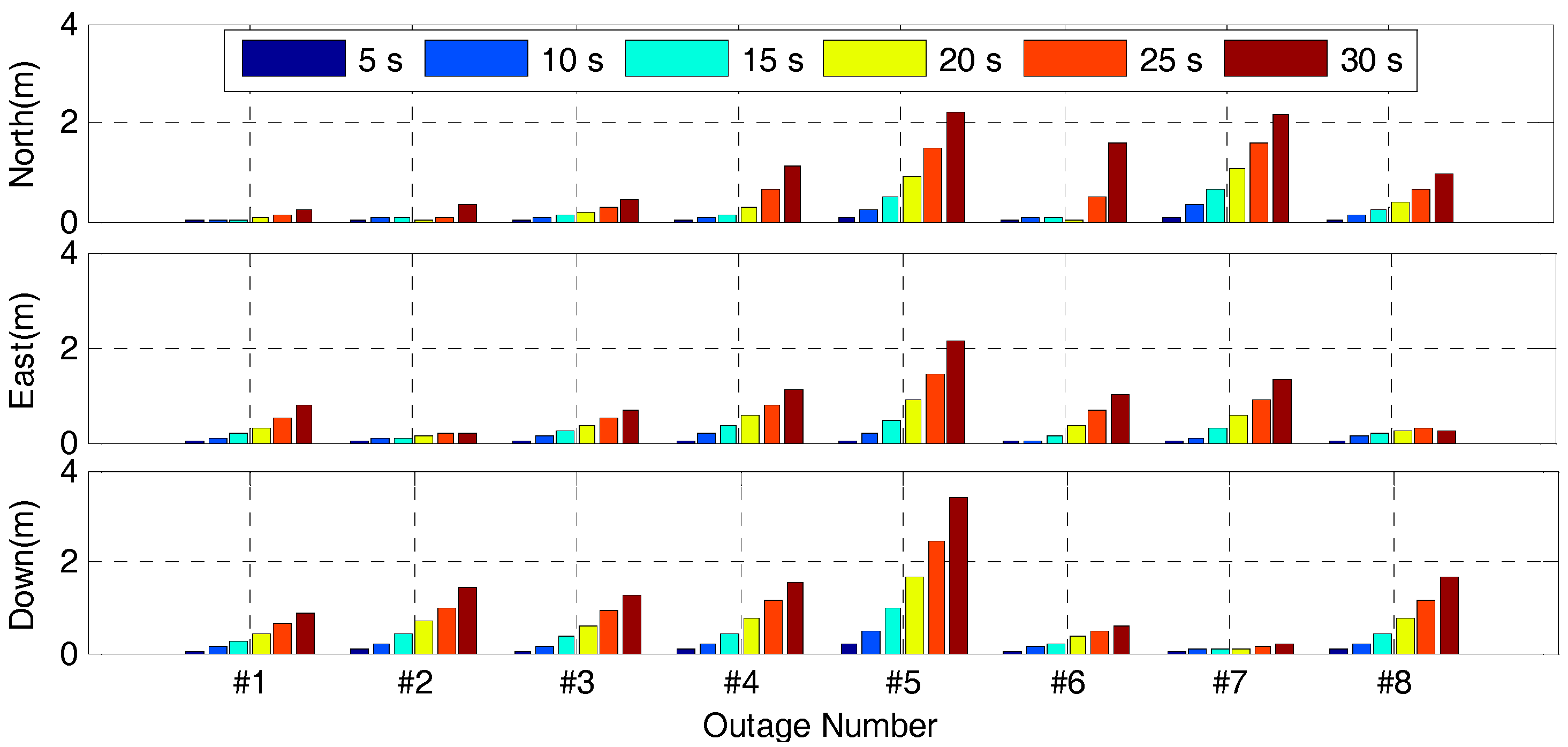
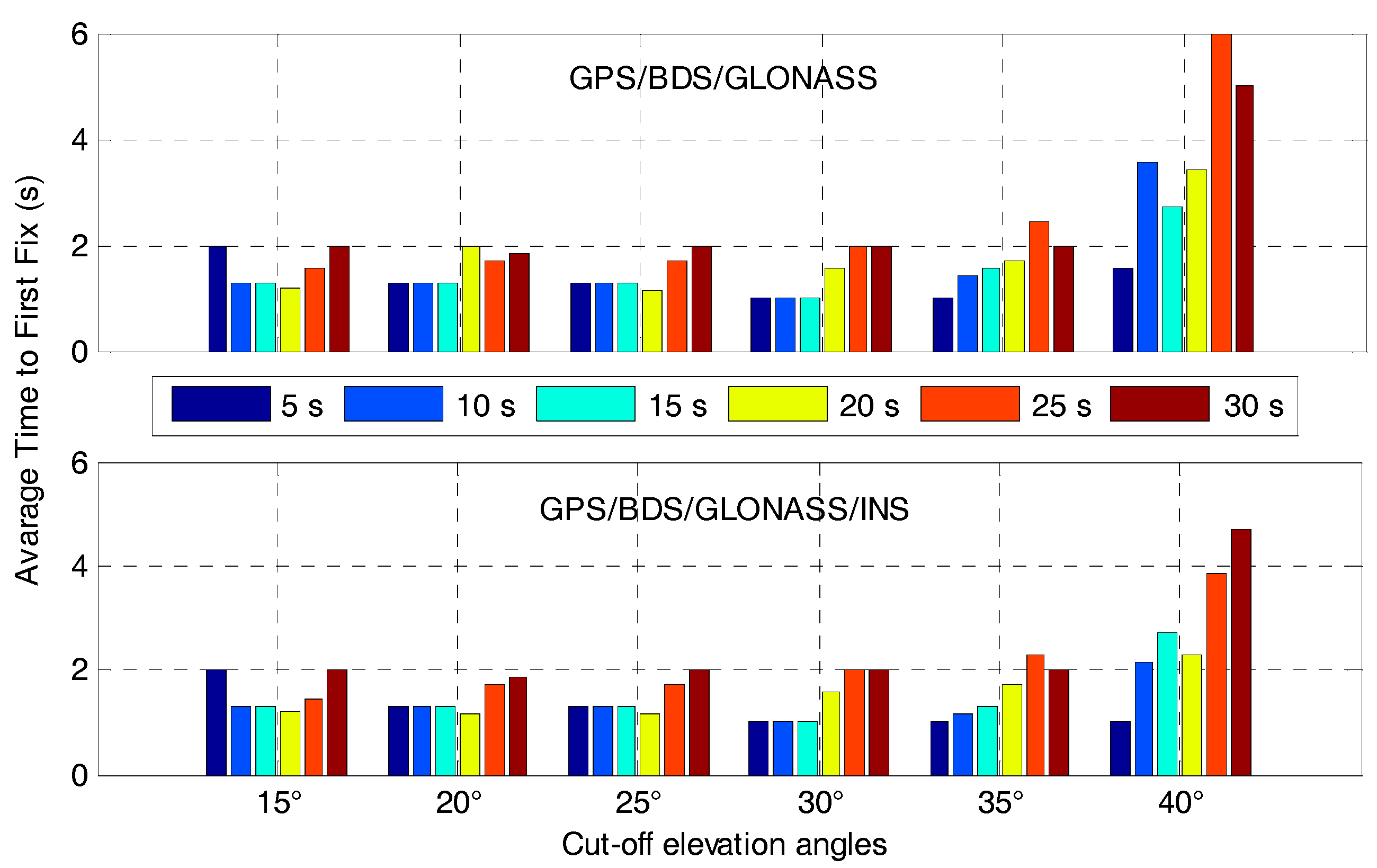
- INS can provide continuous positioning performance when GNSS positioning is not available, and the magnitude of the position drift error during GNSS outages relies heavily on the quality of the IMU sensor and outage duration. In our case, sub-meter position accuracy can be achieved within 15s outage duration. In terms of the recovery performance of AR, the results show that the average time to first fix the ambiguities after short outage durations (less than 30 s) is within 2 s for the tightly-coupled GPS/BDS/GLONASS/ INS integration when the cut-off elevation angles are between 15° and 35°.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- He, H.; Li, J.; Yang, Y.; Xu, J.; Guo, H.; Wang, A. Performance Assessment of Single- and Dual-Frequency BeiDou/GPS Single-Epoch Kinematic Positioning. GPS Solut. 2014, 18, 393–403. [Google Scholar] [CrossRef]
- Deng, C.; Tang, W.; Liu, J.; Shi, C. Reliable Single-Epoch Ambiguity Resolution for Short Baselines Using Combined GPS/BeiDou System. GPS Solut. 2013, 18, 375–386. [Google Scholar] [CrossRef]
- Carcanague, S.; Julien, O.; Vigneau, W.; Macabiau, C. Low-Cost Single-Frequency GPS/GLONASS RTK for Road Users. In Proceedings of the ION 2013 Pacific PNT Meeting, Honolulu, HI, USA, 23–25 April 2013; pp. 168–184. [Google Scholar]
- Montenbruck, O.; Steigenberger, P.; Khachikyan, R.; Weber, G.; Langley, R.B.; Mervart, L.; Hugentobler, U. IGS-MGEX: Preparing the Ground for Multi-Constellation GNSS Science. Inside GNSS 2014, 9, 42–49. [Google Scholar]
- Zhao, S.H.; Cui, X.W.; Guan, F.; Lu, M.Q. A Kalman Filter-Based Short Baseline RTK Algorithm for Single-Frequency Combination of GPS and BDS. Sensors 2014, 14, 15415–15433. [Google Scholar] [CrossRef] [PubMed]
- Teunissen, P.J.G.; Odolinski, R.; Odijk, D. Instantaneous BeiDou+GPS RTK Positioning with High Cut-Off Elevation Angles. J. Geod. 2013, 88, 335–350. [Google Scholar] [CrossRef]
- Odolinski, R.; Teunissen, P.J.G. Low-Cost, High-Precision, Single-Frequency GPS–BDS RTK Positioning. GPS Solut. 2017, 21, 1315–1330. [Google Scholar] [CrossRef]
- Ong, R.B.; Petovello, M.G.; Lachapelle, G. Assessment of GPS/GLONASS RTK Under Various Operational Conditions. In Proceedings of the 22nd International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2009), Savannah, GA, USA, 22–25 September 2009; pp. 3297–3308. [Google Scholar]
- Odolinski, R.; Teunissen, P.J.G.; Odijk, D. Combined BDS, Galileo, QZSS and GPS Single-Frequency RTK. GPS Solut. 2014, 19, 151–163. [Google Scholar] [CrossRef]
- Wanninger, L.; Wallstab-Freitag, S. Combined Processing of GPS, GLONASS, and SBAS Code Phase and Carrier Phase Measurements. In Proceedings of the 20th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2007), Fort Worth, TX, USA, 25–28 September 2007; pp. 866–875. [Google Scholar]
- Wanninger, L. Carrier-Phase Inter-Frequency Biases of GLONASS Receivers. J. Geod. 2012, 86, 139–148. [Google Scholar] [CrossRef]
- Banville, S.; Collins, P.; Lahaye, F. GLONASS Ambiguity Resolution of Mixed Receiver Types without External Calibration. GPS Solut. 2013, 17, 275–282. [Google Scholar] [CrossRef]
- Tian, Y.; Ge, M.; Neitzel, F. Particle Filter-Based Estimation of Inter-Frequency Phase Bias for Real-Time GLONASS Integer Ambiguity Resolution. J. Geod. 2015, 89, 1145–1158. [Google Scholar] [CrossRef]
- Han, S.; Dai, L.; Rizos, C. A New Data Processing Strategy for Combined GPS/GLONASS Carrier Phase-Based Positioning. In Proceedings of the 12th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1999), Nashville, TN, USA, 14–17 September 1999; pp. 1619–1628. [Google Scholar]
- Wang, J. An Approach to GLONASS Ambiguity Resolution. J. Geod. 2000, 74, 421–430. [Google Scholar] [CrossRef]
- Takasu, T.; Yasuda, A. Kalman-Filter-Based Integer Ambiguity Resolution Strategy for Long-Baseline RTK with Ionosphere and Troposphere Estimation. In Proceedings of the 23rd International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2010), Portland, OR, USA, 21–24 September 2010; pp. 161–171. [Google Scholar]
- Li, T.; Wang, J. Comparing the Mathematical Models for GPS&GLONASS Integration. In Proceedings of the International Global Navigation Satellite Systems Society (IGNSS) Symposium 2011, Sydney, Australia, 15–17 November 2011. [Google Scholar]
- Bisnath, S.; Gao, Y. Current State of Precise Point Positioning and Future Prospects and Limitations. In Observing Our Changing Earth; Sideris, M.G., Ed.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 615–623. [Google Scholar]
- Petritoli, E.; Leccese, F. Improvement of Altitude Precision in Indoor and Urban Canyon Navigation for Small Flying Vehicles. In Proceedings of the IEEE International Workshop on Metrology for Aerospace, Benevento, Italy, 4–5 June 2015; pp. 56–60. [Google Scholar]
- Angrisano, A.; Petovello, M.; Pugliano, G. Benefits of Combined GPS/GLONASS with Low-Cost MEMS IMUs for Vehicular Urban Navigation. Sensors 2012, 12, 5134. [Google Scholar] [CrossRef] [PubMed]
- Chiang, K.-W.; Duong, T.; Liao, J.-K. The Performance Analysis of a Real-Time Integrated INS/GPS Vehicle Navigation System with Abnormal GPS Measurement Elimination. Sensors 2013, 13, 10599. [Google Scholar] [CrossRef] [PubMed]
- Reimer, C.; Schneider, T.; Stock, M. INS/GNSS Integration for Aerobatic Flight Applications and Aircraft Motion Surveying. Sensors 2017, 17, 941. [Google Scholar]
- Eling, C.; Klingbeil, L.; Kuhlmann, H. Real-Time Single-Frequency GPS/MEMS-IMU Attitude Determination of Lightweight UAVs. Sensors 2015, 15, 26212. [Google Scholar] [CrossRef] [PubMed]
- Zhang, T.; Ban, Y.; Niu, X.; Guo, W.; Liu, J. Improving the Design of MEMS INS-Aided PLLs for GNSS Carrier Phase Measurement under High Dynamics. Micromachines 2017, 8, 135. [Google Scholar] [CrossRef]
- Petritoli, E.; Giagnacovo, T.; Leccese, F. Lightweight GNSS/IRS Integrated Navigation System for UAV Vehicles. In Proceedings of the IEEE International Workshop on Metrology for Aerospace, Benevento, Italy, 29–30 May 2014; pp. 56–61. [Google Scholar]
- Skaloud, J. Reducing the GPS Ambiguity Search Space by Including Inertial Data. In Proceedings of the 11th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS 1998), Nashville, TN, USA; 1998; pp. 2073–2080. [Google Scholar]
- Petovello, M.; Cannon, M.; Lachapelle, G. Benefits of Using a Tactical-Grade IMU for High-Accuracy Positioning. Navigation 2004, 51, 1–12. [Google Scholar] [CrossRef]
- Monikes, R.; Teltschik, A.; Wendel, J.; Trommer, G. Post-Processing GNSS/INS Measurements Using a Tightly Coupled Fixed-Interval Smoother Performing Carrier Phase Ambiguity Resolution. In Proceedings of the IEEE Position, Location, and Navigation Symposium, Coronado, CA, USA, 25–27 April 2006; pp. 283–290. [Google Scholar]
- Altmayer, C. Enhancing the Integrity of Integrated GPS/INS Systems by Cycle Slip Detection and Correction. In Proceedings of the IEEE Intelligent Vehicles Symposium, Dearborn, MI, USA, 5 October 2000; pp. 174–179. [Google Scholar]
- Colombo, O.L.; Bhapkar, U.V.; Evans, A.G. Inertial-Aided Cycle-Slip Detection/Correction for Precise, Long-Baseline Kinematic GPS. In Proceedings of the 12th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS 1999), Nashville, TN, USA, 14–17 September 1999; pp. 1915–1922. [Google Scholar]
- Kim, Y.; Song, J.; Kee, C.; Park, B. GPS Cycle Slip Detection Considering Satellite Geometry Based on TDCP/INS Integrated Navigation. Sensors 2015, 15, 25336–25365. [Google Scholar] [CrossRef] [PubMed]
- Petovello, M.G. Real-Time Integration of a Tactical-Grade IMU and GPS for High-Accuracy Positioning and Navigation. Ph.D. Thesis, University of Calgary, Calgary, AL, Canada, April 2003. [Google Scholar]
- Niu, X.; Zhang, Q.; Gong, L.; Liu, C.; Zhang, H.; Shi, C.; Wang, J.; Coleman, M. Development and Evaluation of GNSS/INS Data Processing Software for Position and Orientation Systems. Surv. Rev. 2015, 47, 87–98. [Google Scholar] [CrossRef]
- Xu, X.; Xu, X.; Zhang, T.; Li, Y.; Tong, J. A Kalman Filter for SINS Self-Alignment Based on Vector Observation. Sensors 2017, 17, 264. [Google Scholar] [CrossRef] [PubMed]
- Kopáčik, A.; Kajánek, P.; Lipták, I. Systematic Error Elimination Using Additive Measurements and Combination of Two Low Cost IMSs. IEEE Sens. J. 2016, 16, 6239–6248. [Google Scholar] [CrossRef]
- Han, H.; Wang, J.; Wang, J.; Tan, X. Performance Analysis on Carrier Phase-Based Tightly-Coupled GPS/BDS/INS Integration in GNSS Degraded and Denied Environments. Sensors 2015, 15, 8685–8711. [Google Scholar] [CrossRef] [PubMed]
- Han, H.; Wang, J.; Wang, J.; Moraleda, A.H. Reliable Partial Ambiguity Resolution for Single-Frequency GPS/BDS and INS Integration. GPS Solut. 2017, 21, 251–264. [Google Scholar] [CrossRef]
- Petovello, M. GLONASS Inter-Frequency Biases and Ambiguity Resolution. Inside GNSS 2009, 4, 24–28. [Google Scholar]
- Park, B.; Lim, C.; Yun, Y.; Kim, E.; Kee, C. Optimal Divergence-Free Hatch Filter for GNSS Single-Frequency Measurement. Sensors 2017, 17, 448. [Google Scholar] [CrossRef] [PubMed]
- Gendt, G.; Dick, G.; Reigber, C.H.; Tomassini, M.; Liu, Y.; Ramatschi, M. Demonstration of NRT GPS Water Vapor Monitoring for Numerical Weather Prediction in Germany. J. Meteorol. Soc. Jpn. 2003, 82, 360–370. [Google Scholar]
- Teunissen, P.J.G. The Least-Squares Ambiguity Decorrelation Adjustment: A Method for Fast GPS Integer Ambiguity Estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. An Optimality Property of the Integer Least-Squares Estimator. J. Geod. 1999, 73, 587–593. [Google Scholar] [CrossRef]
- Scherzinger, B.M. Robust Positioning with Single Frequency Inertially Aided RTK. In Proceedings of the 2002 National Technical Meeting of the Institute of Navigation, San Diego, CA, USA, 28–30 January 2002; pp. 911–917. [Google Scholar]
- Benson, D.O. A Comparison of Two Approaches to Pure-Inertial and Doppler-Inertial Error Analysis. IEEE Trans. Aerosp. Electron. Syst. 1975, AES-11, 447–455. [Google Scholar] [CrossRef]
- Park, M. Error Analysis and Stochastic Modeling of MEMS Based Inertial Sensors for Land Vehicle Navigation Applications. Ph.D. Thesis, University of Calgary, Calgary, AL, Canada, April 2004. [Google Scholar]
- Shin, E.-H. Estimation Techniques for Low-Cost Inertial Navigation. Ph.D. Thesis, The University of Calgary, AL, Canada, May 2005. [Google Scholar]
- Lee, H.K.; Wang, J.; Rizos, C. An Integer Ambiguity Resolution Procedure for GPS/Pseudolite/INS Integration. J. Geod. 2005, 79, 242–255. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dimensions (mm) | Bias | Scale Factor Stability | Random Walk | |||
|---|---|---|---|---|---|---|
| Gyro. ( | Acce. (mGal) | Gyro.(ppm) | Acce.(ppm) | Angular () | Velocity () | |
| 168 × 152 × 89 | 20 | 50000 | 1500 | 4000 | 0.0667 | 0.10 |
| Cut-Off (°) | 15 | 20 | 25 | 30 | 35 | 40 |
|---|---|---|---|---|---|---|
| PDOP | 1.1670 | 1.3043 | 1.8347 | 2.7552 | 3.4205 | 4.2781 |
| HDOP | 0.5187 | 0.5579 | 0.7044 | 0.9165 | 1.0135 | 1.1521 |
| VDOP | 1.0433 | 1.1866 | 1.6842 | 2.6033 | 3.2651 | 4.1215 |
| System Configuration | Success Rate (%) for Different Cut-Off Elevation Angles (°) | ||||||
|---|---|---|---|---|---|---|---|
| 15 | 20 | 25 | 30 | 35 | 40 | ||
| RTK | GPS | 8.4 (7.8) | 4.3 (7.0) | 0.4 (5.8) | — | — | — |
| GC | 86.4 (19.2) | 89.5 (18.3) | 92.7 (15.6) | 92.6 (12.5) | 77.7 (10.8) | 27.2 (8.5) | |
| GCR | 84.3 (26.4) | 88.5 (24.2) | 93.2 (19.5) | 95.9 (15.4) | 90.9 (13.2) | 50.3 (10.8) | |
| RTK/INS | GPS | 77.7 (7.8) | 67.6 (7.0) | 6.8 (5.8) | — | — | — |
| GC | 87.1 (19.2) | 90.3 (18.3) | 94.1 (15.6) | 97.8 (12.5) | 99.3 (10.8) | 99.7 (8.5) | |
| GCR | 84.5 (26.4) | 88.6 (24.2) | 94.0 (19.5) | 97.7 (15.4) | 99.1 (13.2) | 99.5 (10.8) | |
| System Configurations | GPS | GPS/BDS | GPS/BDS/GLONASS | ||||
|---|---|---|---|---|---|---|---|
| RTK | RTK/INS | RTK | RTK/INS | RTK | RTK/INS | ||
| RMS (mm) | North | 5.8 | 5.0 | 3.3 | 2.2 | 2.8 | 1.2 |
| East | 4.0 | 3.4 | 2.4 | 1.7 | 2.2 | 1.2 | |
| Down | 9.9 | 8.9 | 7.3 | 5.4 | 6.8 | 3.6 | |
| Outage Duration (s) | 5 | 10 | 15 | 20 | 25 | 30 | |
|---|---|---|---|---|---|---|---|
| RMS (m) | North | 0.048 | 0.156 | 0.316 | 0.535 | 0.861 | 1.352 |
| East | 0.039 | 0.126 | 0.270 | 0.481 | 0.757 | 1.096 | |
| Down | 0.083 | 0.236 | 0.473 | 0.788 | 1.177 | 1.639 | |
| Max (m) | North | 0.101 | 0.327 | 0.661 | 1.087 | 1.609 | 2.196 |
| East | 0.054 | 0.204 | 0.482 | 0.886 | 1.436 | 2.134 | |
| Down | 0.170 | 0.492 | 0.986 | 1.635 | 2.436 | 3.381 | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, T.; Zhang, H.; Niu, X.; Gao, Z. Tightly-Coupled Integration of Multi-GNSS Single-Frequency RTK and MEMS-IMU for Enhanced Positioning Performance. Sensors 2017, 17, 2462. https://doi.org/10.3390/s17112462
Li T, Zhang H, Niu X, Gao Z. Tightly-Coupled Integration of Multi-GNSS Single-Frequency RTK and MEMS-IMU for Enhanced Positioning Performance. Sensors. 2017; 17(11):2462. https://doi.org/10.3390/s17112462
Chicago/Turabian StyleLi, Tuan, Hongping Zhang, Xiaoji Niu, and Zhouzheng Gao. 2017. "Tightly-Coupled Integration of Multi-GNSS Single-Frequency RTK and MEMS-IMU for Enhanced Positioning Performance" Sensors 17, no. 11: 2462. https://doi.org/10.3390/s17112462