The Multi-Parameter Wireless Sensing System (MPwise): Its Description and Application to Earthquake Risk Mitigation


Abstract
:1. Introduction
2. The MPwise System
2.1. General
- The resulting system would be more resilient to external disturbances,
- Useful information could be already available at the node level for undertaking automatic (unsupervised) emergency measures,
- By processing data at the node level, potentially no raw-data needs to be transmitted across the network, freeing it for the circulation of only the resulting (higher-level) information while allowing a narrower communication band and prompter response of the system.
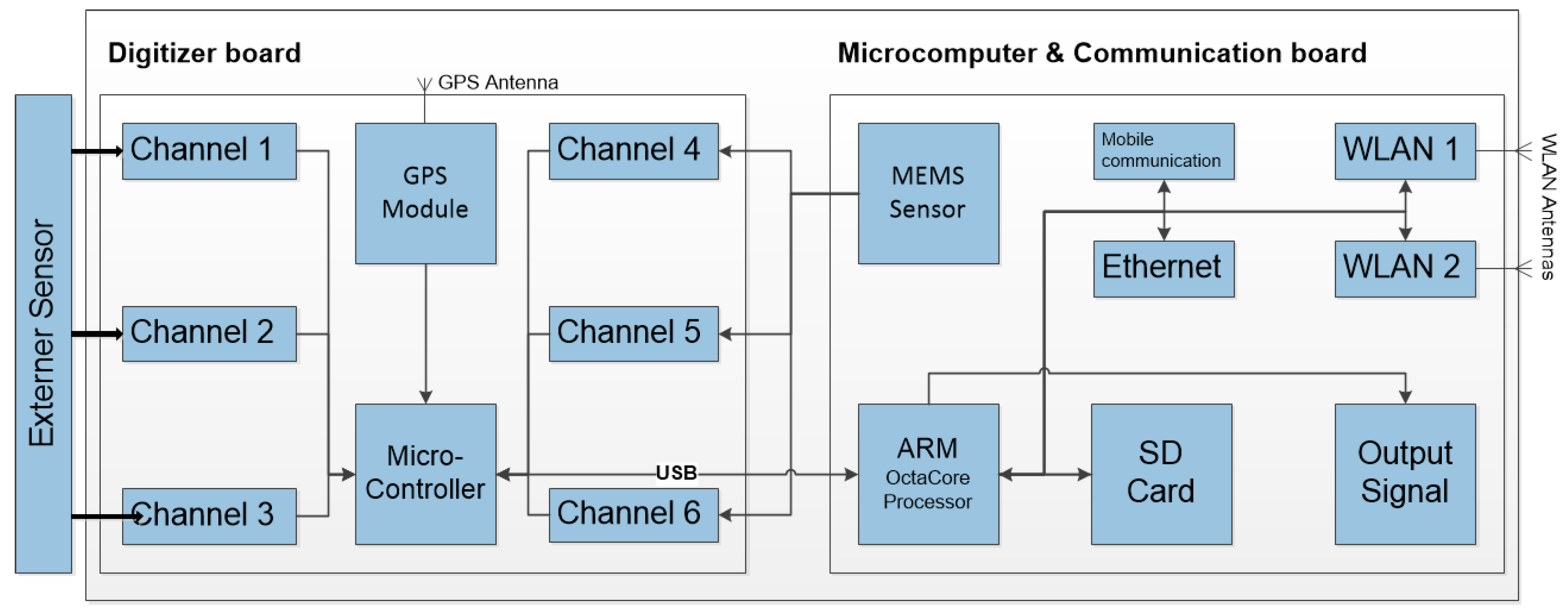
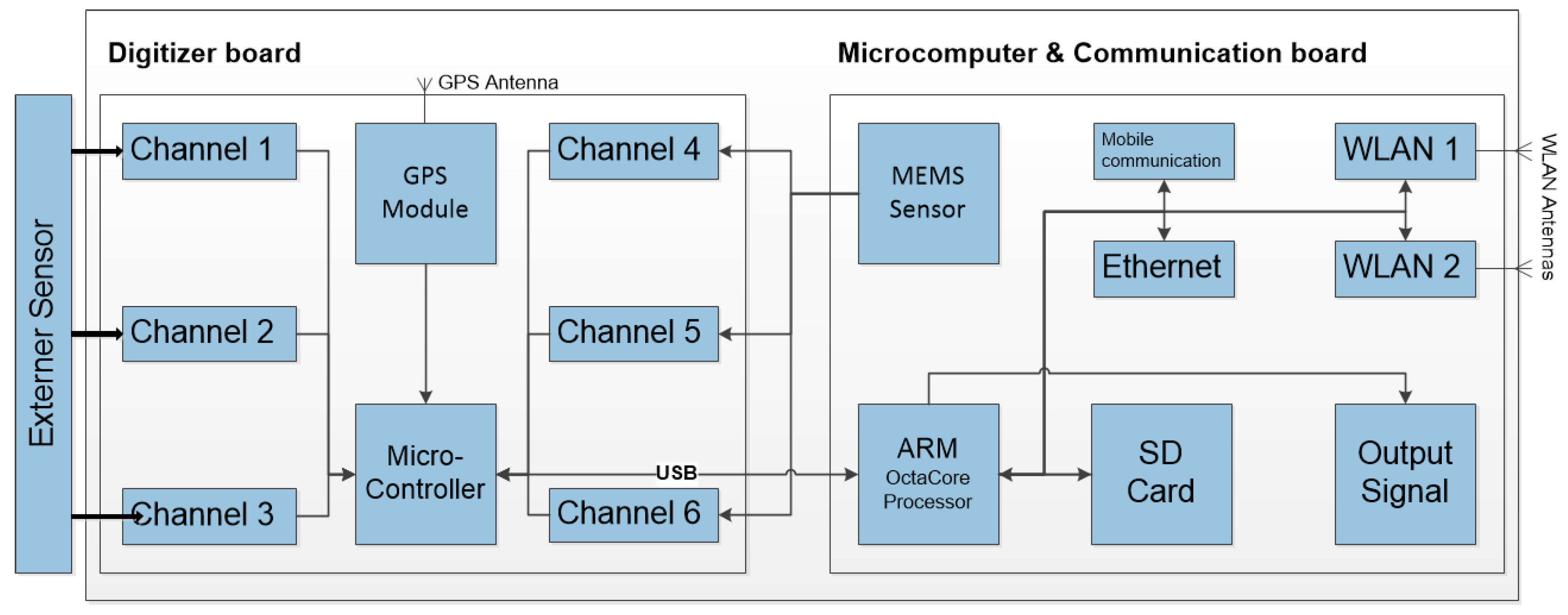
2.2. Hardware
- The digitizer board (Table 3), i.e., an analogue-to-digital converter (ADC), was designed as a low-power consumption solution and considered special seismic requirements such as a high resolution (number of bits) in the analogue to digital conversion, exact time marks (using a (Global Navigation Satellite System—GNSS—module which is also used for locational information) and minimal drift in the time accuracy included in its design. The board is equipped with a 6-channel ADC which has a resolution of 24 bits, with the sampling rate selectable from 50 to 400 samples per second (sps).
- The microcomputer (Table 4) board has three roles: (1) acquisition and storage of data; (2) data processing and analysis; and (3) communications, i.e., it includes the periphery for data transmission. It is made up of an embedded 8-core ARM processor (http://www.arm.com/; see Table 4) that uses a micro SD card (currently 32 GBytes, but easily expandable) as a local data storage device. The communications hardware linked to the microcomputer board consists of two omni-directional dual-band antennas for WLAN communication and one omni-directional antenna for mobile communications.
- The sensors themselves (see Table 2). Each unit includes a high performance 3-axis ultracompact analogue accelerometer, based on Micro Electro Mechanical Systems (MEMS), which have been successfully employed in various seismic networks (e.g., [1,3,4]) as well as for field acquisition by the exploration sector [13]. Different external sensors can be further connected to up to six input channels. Tested configurations include standard strong and weak motion sensors, broadband sensors, and USB-connected devices such as video cameras, temperature and humidity sensors, and GNSS systems (note, the latter is different from the internal GNSS used for the time synchronization).
2.3. System Software
- The operating system is based on a Linux kernel and GNU software, which is open-source, freely available and highly configurable. By default, it contains only the minimum that is required to run Linux without a desktop environment.
- SeisComP: The Seismological Communication Processor (SeisComP; Seiscomp3, https://www.seiscomp3.org/) is an open-source software package and concept for real-time seismic data acquisition, processing (quality control, event detection and location), distribution and interactive analysis developed by the GFZ. It includes the SeedLink protocol (http://www.seiscomp3.org/wiki/doc/applications/seedlink), which is the system devoted to the real-time seismic data distribution, that is, a server protocol based on the Transmission Control Protocol (TCP; TCP/IP, https://en.wikipedia.org/wiki/Transmission_Control_Protocol). There is also software embedded within this package for on-site EEW.
- Cube_plugin: This program is embedded in SeisComP and handles the data streams from the digitizer board, and then archives them via a SeedLink (see below) or common acquisition protocol (CAPS) server (this has been developed by gempa GmbH; http://www.gempa.de/caps/). One of the advantages of CAPS over SeedLink is the greater ease with which one can transfer multi-sensor data from the node to a gateway node, which in turn transmits the information to a data center or end user. For example, this feature allows the optimization of the joint transfer of seismic data and images using a unified protocol.
- Optimized Link State Routing (OLSR Project): OLSR (OLSR, http://www.olsr.org) is a table-driven proactive routing protocol currently chosen for the wireless mesh network. As a proactive protocol, it periodically assesses and maintains the network topology by sharing information about its direct neighborhood throughout the network. OLSR is capable of operating with hundreds of nodes, and it is also widely accepted by several mesh networking communities (FREIFUNK, https://freifunk.net/).
2.4. Communications
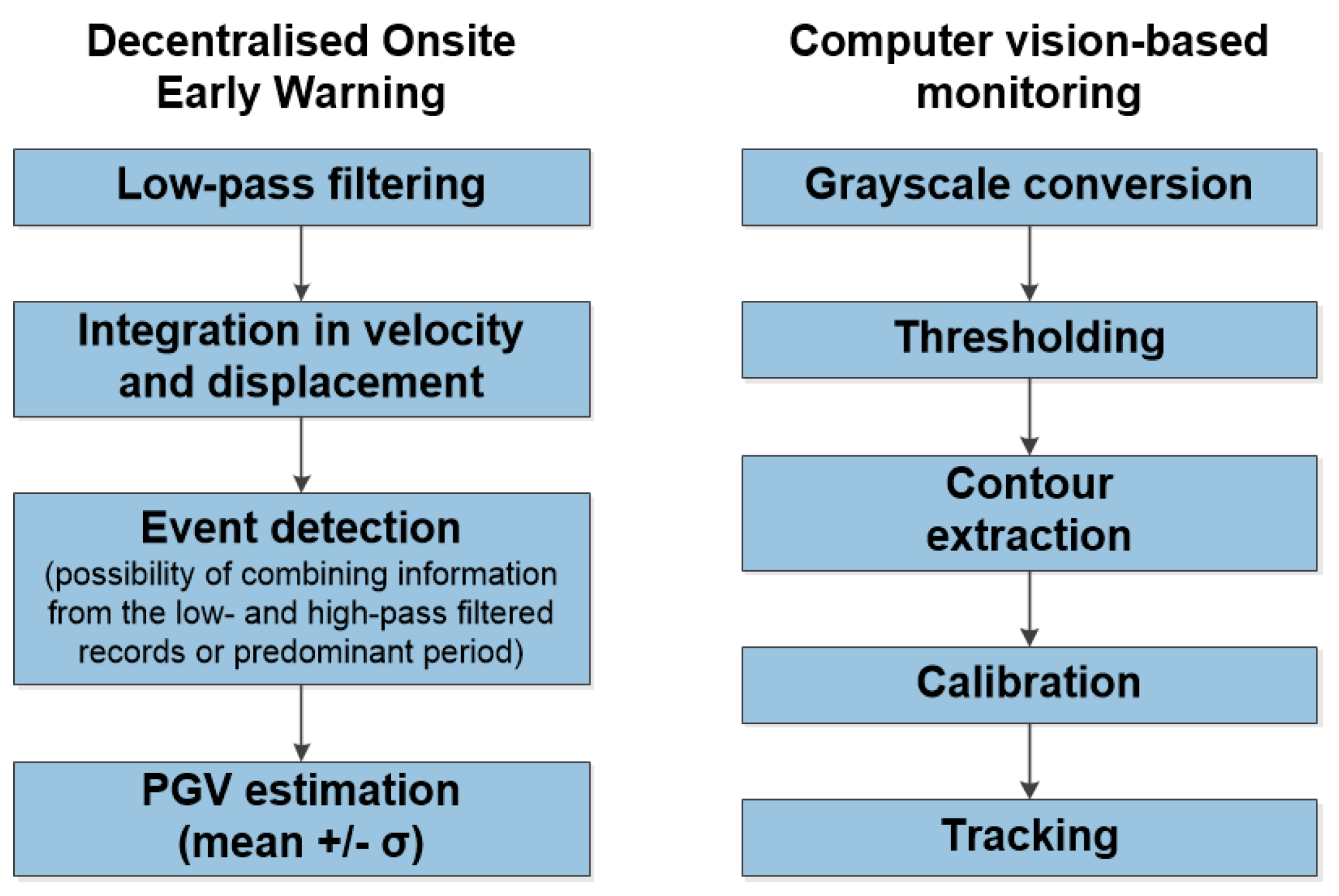
2.5. Embedded and Joint Processing on Node Level
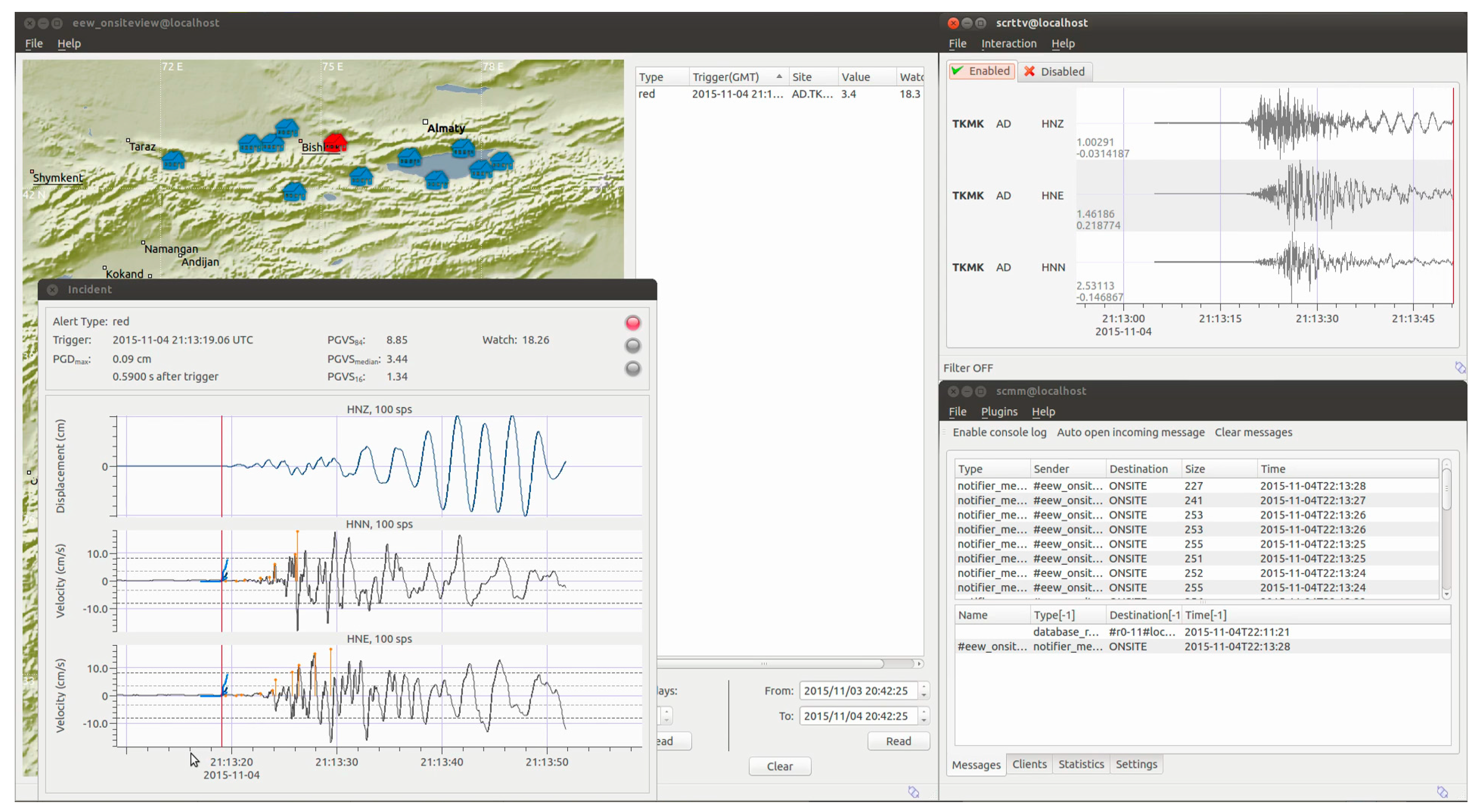
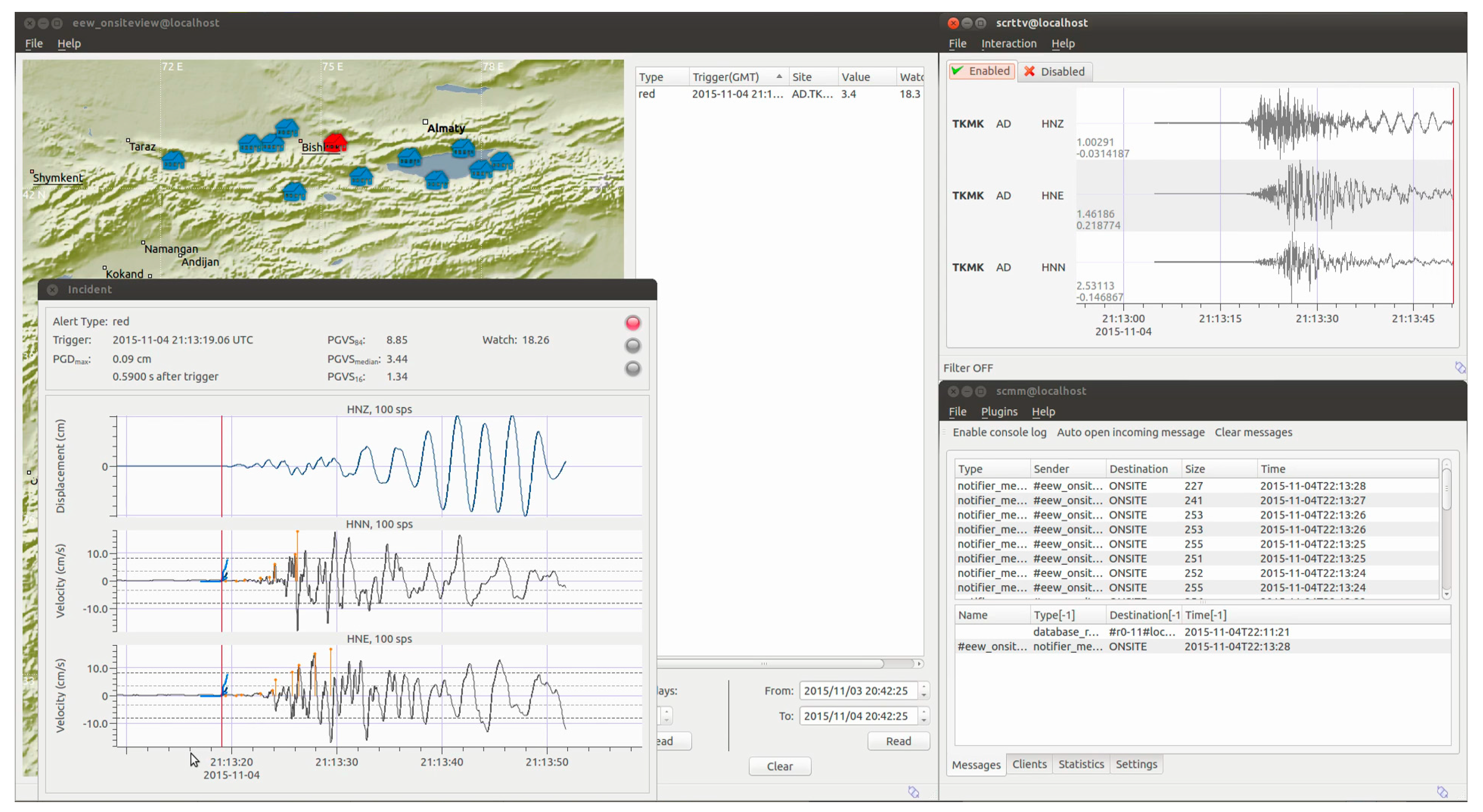
3. Applications: Earthquake Early Warning in Kyrgyzstan
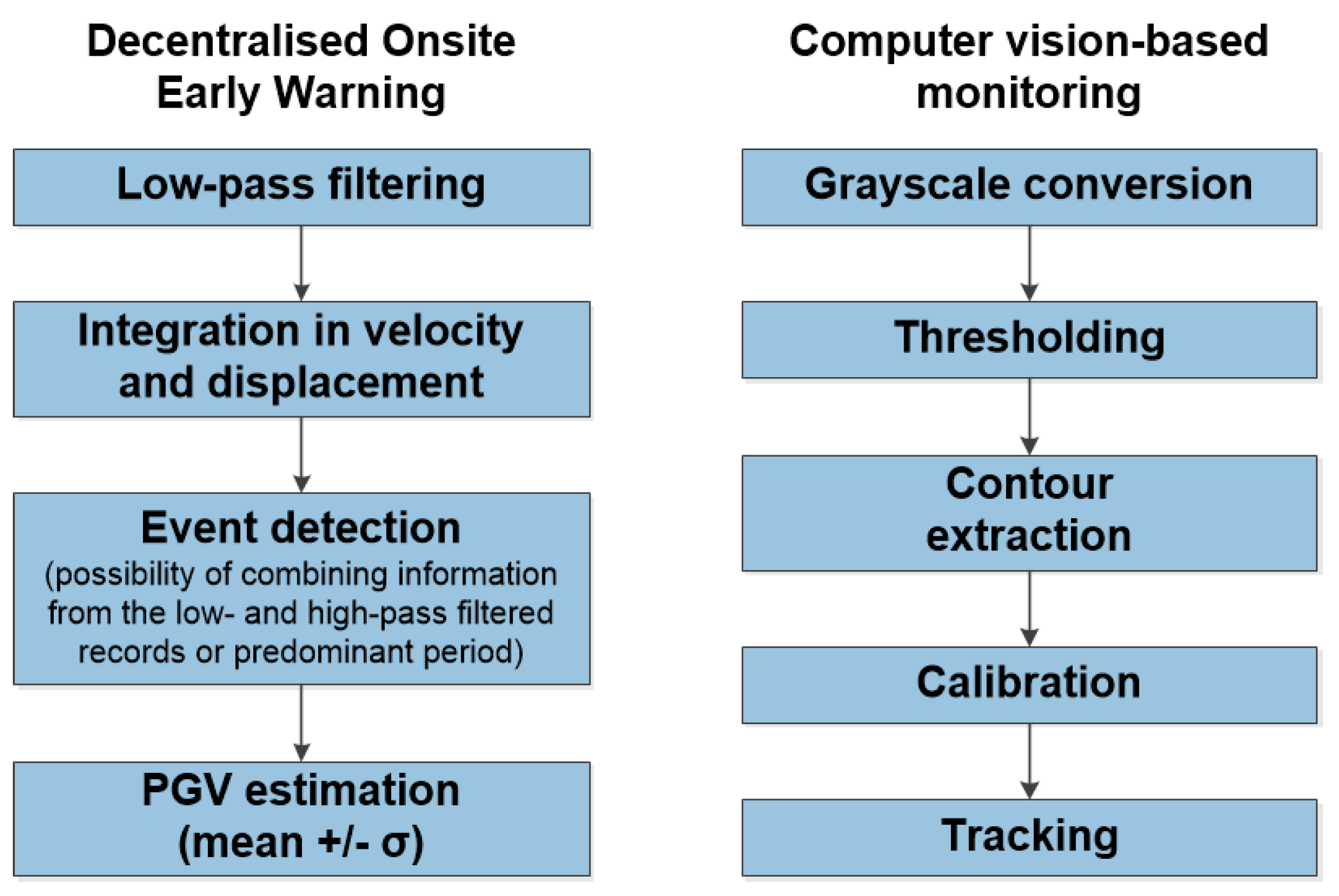
- Implementing a threshold-based on-site early warning system (OSEWS) that can also be employed following a decentralized approach for specific infrastructure;
- Monitoring the structural response, and its changes, of buildings and infrastructure in real time during an after-shock sequence;
- Assessing the expected damage to nearby structures soon after an event’s occurrence;
- Estimating the overall expected damage to a target structure during the aftershock sequence;
- Validating damage forecasts determined by, e.g., probabilistic approaches, and updating the fragility curves based on recorded ground motion.
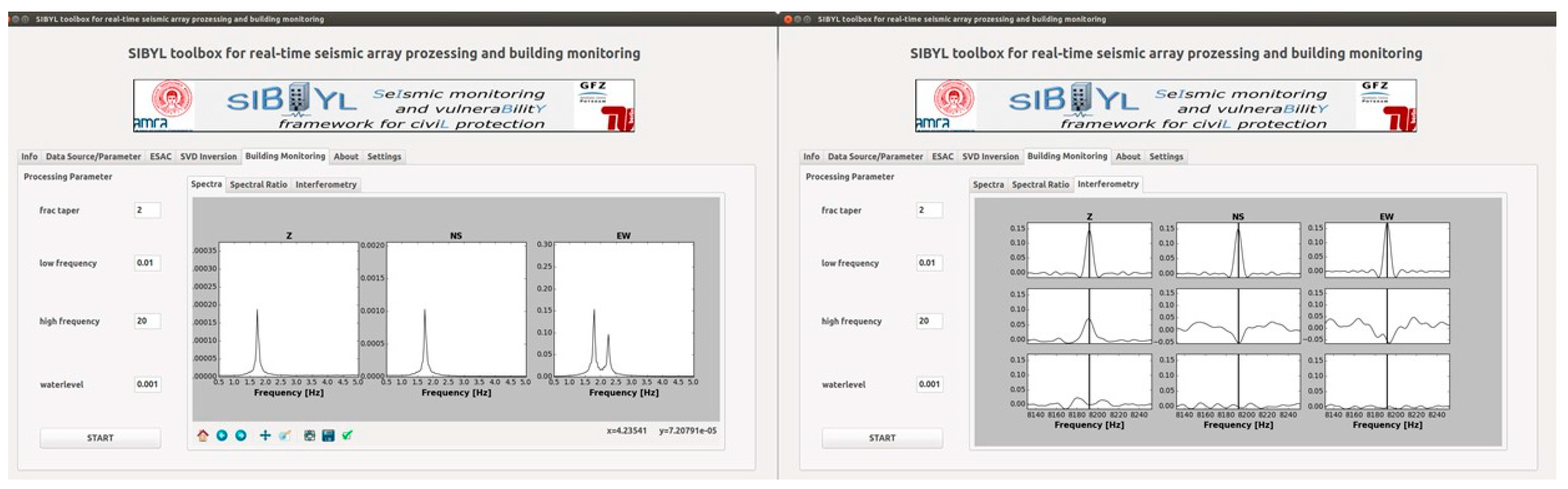
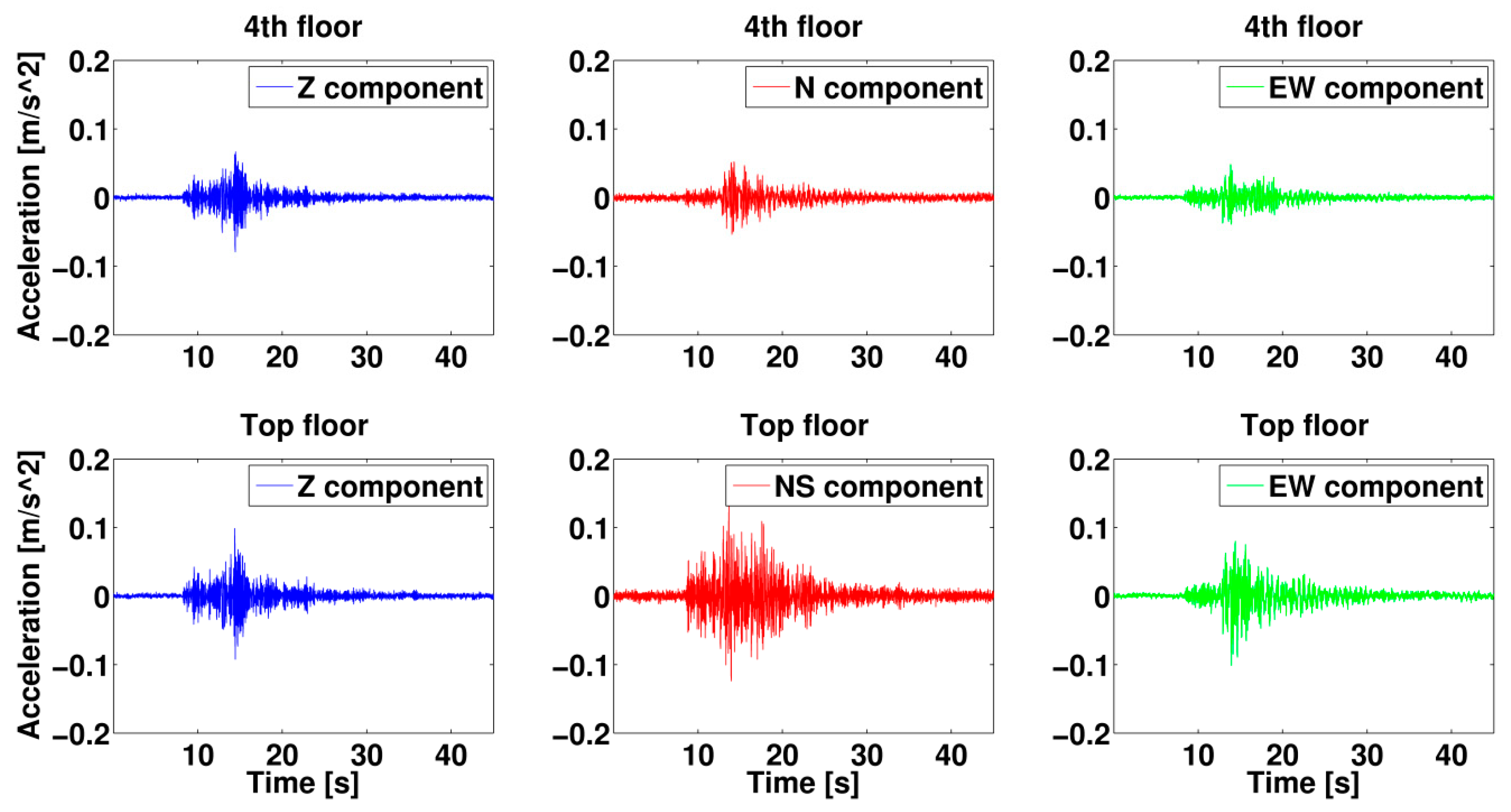
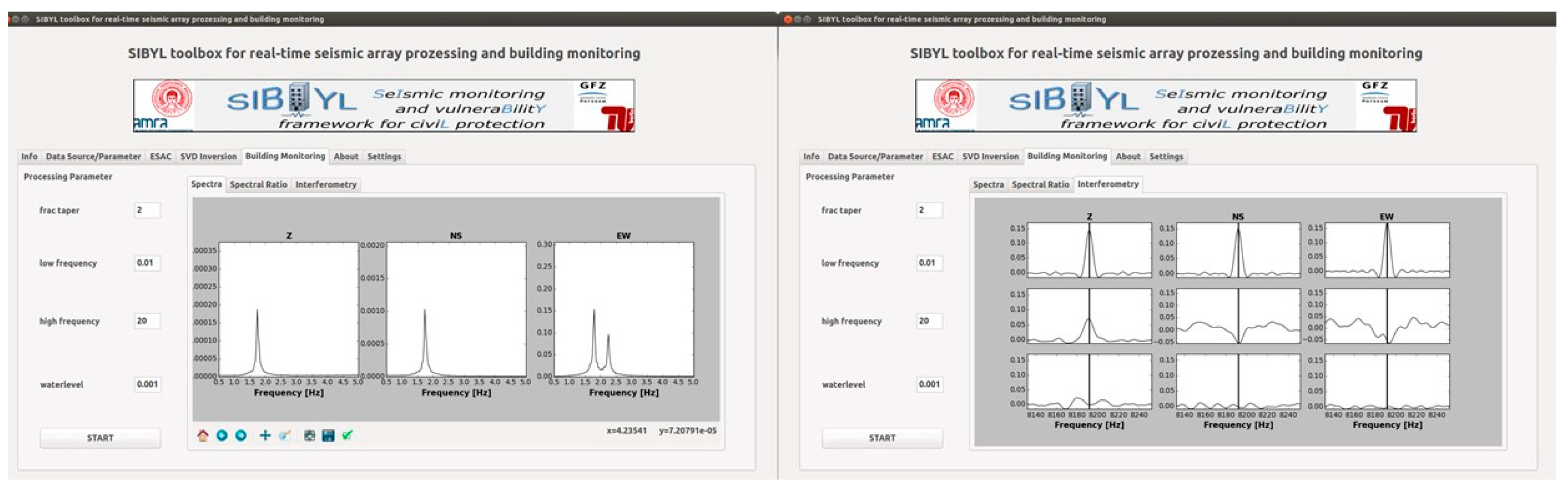
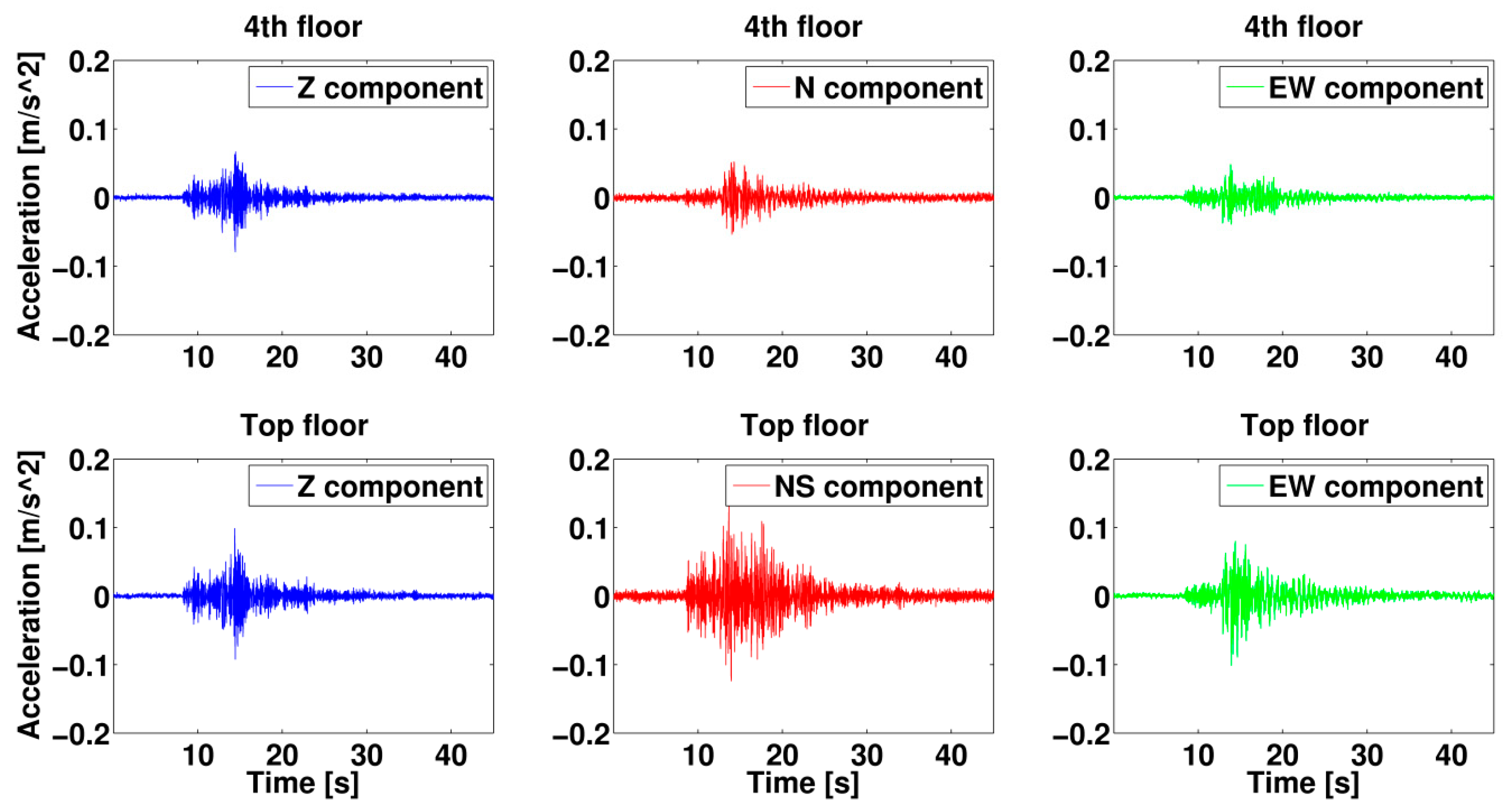
4. Application: Building Measurements and Structural Monitoring in Thessaloniki, Greece
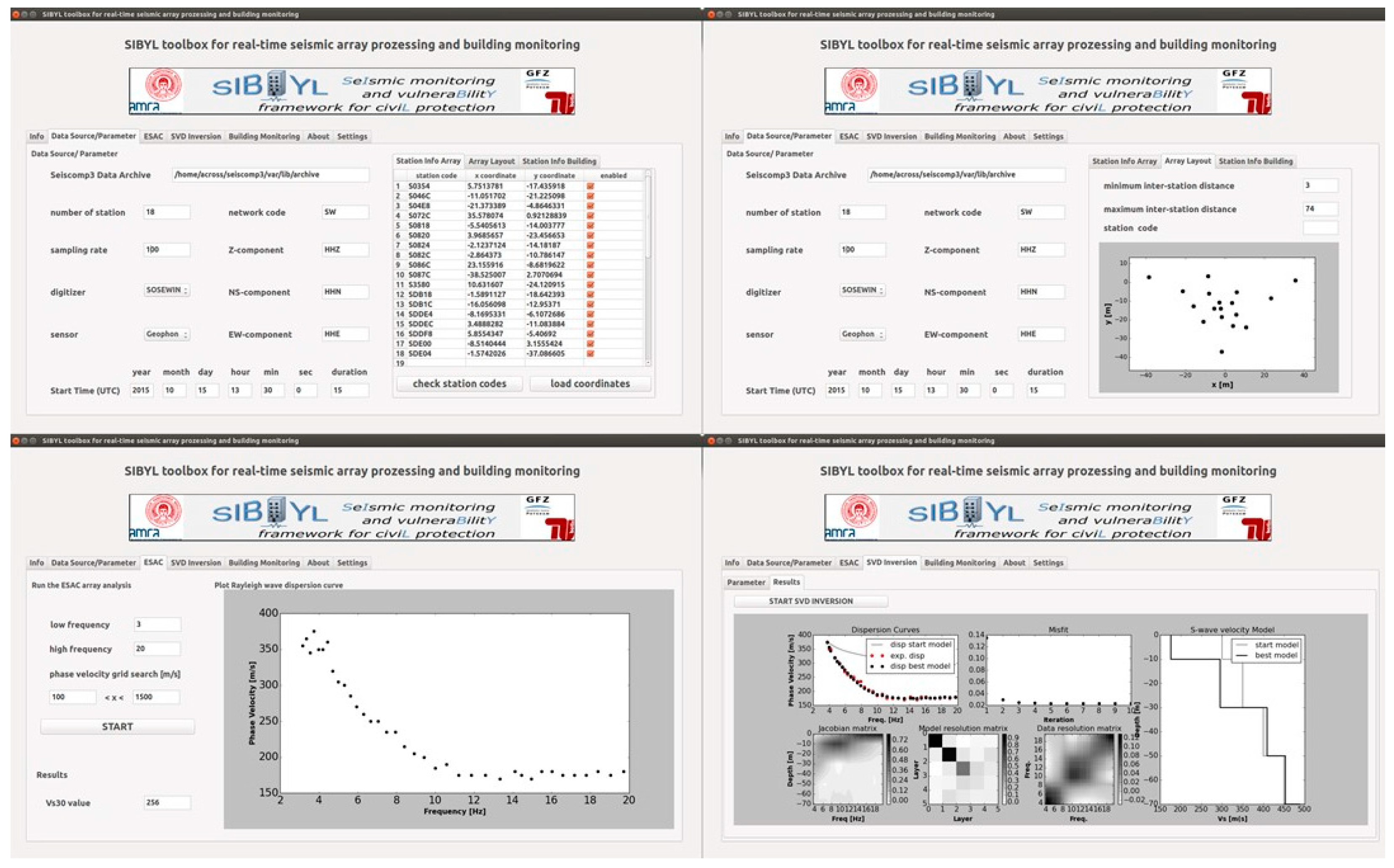
5. Application: Site Amplification Assessments in L’Aquila
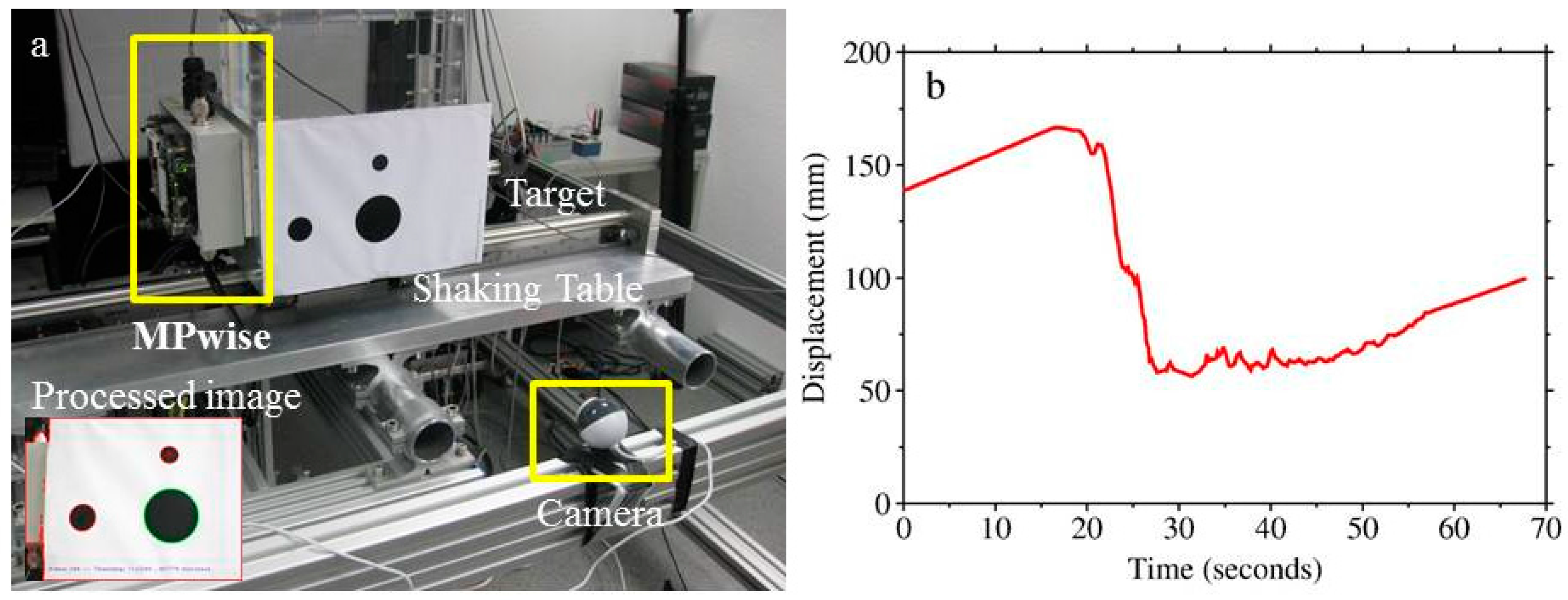
6. Ongoing Experimental Applications: Computer Vision-Based Monitoring
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Fleming, K.; Picozzi, M.; Milkereit, C.; Kühnlenz, F.; Lichtblau, B.; Fischer, J.; Zulfikar, C.; Özel, O.; the SAFER and EDIM working groups. The Self-organizing Seismic Early Warning Information Network (SOSEWIN). Seismol. Res. Lett. 2009, 80, 755–771. [Google Scholar] [CrossRef]
- Pittore, M.; Boxberger, T.; Fleming, K.; Parolai, S. On the application of Rapid Environmental Mapping methodologies (REM) to seismic risk understanding and vulnerability monitoring. In Proceedings of the 41st IAHS World Congress Sustainability and Innovation for the Future, Albufeira, Portugal, 13–16 September 2016. [Google Scholar]
- Picozzi, M.; Milkereit, C.; Parolai, S.; Jaeckel, K.-H.; Veit, I.; Fischer, J.; Zschau, J. GFZ Wireless Seismic Array (GFZ-WISE), a Wireless Mesh Network of Seismic Sensors: New Perspectives for Seismic Noise Array Investigations and Site Monitoring. Sensors 2010, 10, 3280–3304. [Google Scholar] [CrossRef] [PubMed]
- Fischer, J.; Redlich, J.-P.; Zschau, J.; Milkereit, C.; Picozzi, M.; Fleming, K.; Brumbulli, M.; Lichtblau, B.; Eveslage, I. A wireless mesh sensing network for early warning. J. Netw. Comput. Appl. 2012, 35, 538–547. [Google Scholar] [CrossRef]
- Parolai, S.; Bindi, D.; Boxberger, T.; Milkereit, C.; Fleming, K.; Pittore, M. On-Site Early Warning and Rapid Damage Forecasting Using Single Stations: Outcomes from the REAKT Project. Seismol. Res. Lett. 2015, 86. [Google Scholar] [CrossRef]
- Parolai, S.; Oth, A.; Boxberger, T. Performance of the GFZ Decentralized on Site Earthquake Early Warning Software (GFZ-Sentry): Application to K-NET and KIK-net recordings (Japan). Seismol. Res. Lett. 2017. [Google Scholar] [CrossRef]
- Parolai, S.; Boxberger, T.; Pilz, M.; Fleming, K.; Haas, M.; Pittore, M.; Petrovic, B.; Moldobekov, B.; Zubovich, A.; Lauterjung, J. Assessing Earthquake Early Warning Using Sparse Networks in Developing Countries: Case Study of the Kyrgyz Republic. Front. Earth Sci. 2017, 5, 74. [Google Scholar] [CrossRef]
- Rainieri, C.; Fabbrocino, G.; Cosenza, E. Structural hesalth monitoring systems as a tool for seismic protection. In Proceedings of the 14th World Conference on Earthquake Engineering, Beijing, China, 12–17 October 2008. [Google Scholar]
- Pilz, M.; Parolai, S.; Bindi, D.; Saponaro, A.; Abdybachaev, U. Combining seismic noise techniques for landslide characterization. Pure Appl. Geophys. 2014, 171, 1729–1745. [Google Scholar] [CrossRef]
- Mileti, D.S.; Sorensen, J.H. Communication of Emergency Public Warnings: A Social Science Perspective and the State-of-the-Art Assessment; ORNL-6609; Department of Energy, Oak Ridge National Laboratory: Oak Ridge, TN, USA, 1990. [Google Scholar]
- Skolnik, D.A.; Ciudad-Real, M.; Sinclair, M.; Graf, T.; Swanson, D.; Goings, C.; Megahed, A.; Safak, E. Enhanced Rapid Post-Event Assessment of Buildings. In Proceedings of the 9th International Conference on Structural Dynamics, EURODYN, Porto, Portugal, 30 June–2 July 2014. [Google Scholar]
- Marin-Perez, R.; Garcia-Pintado, J.; Gomez, A.S. A real-time measurement system for long-life flood monitoring and warning applications. Sensors 2012, 12, 4213–4236. [Google Scholar] [CrossRef] [PubMed]
- Hons, M.; Stewart, R.; Lawton, D.; Bertram, M. Field data comparisons of MEMS accelerometers and analog geophones. Lead. Edge 2008, 896–902. [Google Scholar] [CrossRef]
- Knecht, A.; Manetti, L. Using GPS in structural health monitoring. In Proceedings of the Spie’s 8th annual international symposium on smart structures and materials, Newport Beach, CA, USA, 4–8 March 2001. [Google Scholar]
- Nakamura, Y. Development of earthquake early-warning system for the Shinkansen, some recent earthquake engineering research and practical in Japan. In Proceedings of the Japanese National Committee of the International Association for Earthquake Engineering, Tokyo, Japan, 1 August 1984; pp. 224–238. [Google Scholar]
- Nakamura, Y. On the urgent earthquake detection and alarm system (UrEDAS). In Proceedings of the 9th World Conference on Earthquake Engineering, Tokyo, Japan, 2–6 August 1988; Volume 7, pp. 673–678. [Google Scholar]
- Zollo, A.; Amoroso, O.; Lancieri, M.; Wu, Y.-M.; Kanamori, H. A threshold-based earthquake early warning using dense accelerometer networks. Geophys. J. Int. 2010, 183, 963–974. [Google Scholar] [CrossRef]
- Kanamori, H. Real-time seismology and earthquake damage mitigation. Annu. Rev. Earth Planet. Sci. 2005, 33, 195–214. [Google Scholar] [CrossRef]
- Iervolino, I. Performance-based earthquake early warning. Soil Dyn. Earthq. Eng. 2011, 31, 209–222. [Google Scholar] [CrossRef]
- Cheng, M.H.; Wu, S.; Heaton, T.H.; Beck, J.L. Earthquake early warning application to buildings. Eng. Struct. 2014, 60, 155–164. [Google Scholar] [CrossRef]
- Wu, S.; Beck, J.L.; Heaton, T.H. ePAD: Earthquake Probability-Based Automated Decision-Making Framework for Earthquake Early Warning. Comput.-Aided Civ. Infrastruct. Eng. 2013, 28, 737–752. [Google Scholar] [CrossRef]
- Brincker, R.; Zhang, L.; Andersen, P. Modal Identification from Ambient Responses using Frequency Domain Decomposition. In Proceedings of the 18th International Modal analysis Conference, San Antonio, TX, USA, 7–10 February 2000. [Google Scholar]
- Van Overschee, P.; De Moor, B. Subspace Identification for Linear Systems: Theory-Implemantation-Applications; K.U. Leuven Academic Publishers: Dordrecht, The Netherlands, 1996. [Google Scholar]
- Petrovic, B.; Parolai, S. Joint Deconvolution of Building and Downhole Strong-Motion Recordings: Evidence for the Seismic Wavefield Being Radiated Back into the Shallow Geological Layers. Bull. Seism. Soc. Am. 2016, 106, 1720–1732. [Google Scholar] [CrossRef]
- Arai, H.; Tokimatsu, K. S-wave velocity profiling by inversion of microtremor H/V spectrum. Bull. Seism. Soc. Am. 2004, 94, 53–63. [Google Scholar] [CrossRef]
- Parolai, S.; Picozzi, M.; Richwalski, S.M.; Milkereit, C. Joint inversion of phase velocity dispersion and H/V ratio curves from seismic noise recordings using a genetic algorithm, considering higher modes. Geophys. Res. Lett. 2005, 32, L01303. [Google Scholar] [CrossRef]
- Picozzi, M.; Albarello, D. Combining Genetic and Linearized algorithms for a two-step joint inversion of Rayleigh wave dispersion and H/V spectral ratio curves. Geophys. J. Int. 2007, 169, 189–201. [Google Scholar] [CrossRef]
- Press, W.H.; Teukolsky, S.A.; Vetterling, W.T.; Flannery, B.P. Numerical Recipes in Fortran, 2nd ed.; Cambridge University Press: Cambridge, UK, 1992. [Google Scholar]
- Ohori, M.; Nobata, A.; Wakamatsu, K. A comparison of ESAC and FK methods of estimating phase velocity using arbitrarily shaped microtremor arrays. Bull. Seism. Soc. Am. 2002, 92, 2323–2332. [Google Scholar] [CrossRef]
- Doerr, K.-U.; Hutchinson, T.C.; Kuester, F. A methodology for image-based tracking of seismic-induced motions. Proc. SPIE 2005, 5758, 321–332. [Google Scholar]
- Rodrıguez, P. Optical motion tracking in earthquake-simulation shake table testing: Preliminary results. In Proceedings of the 43rd Asilomar conference on Signals, systems and computers, Pacific Grove, CA, USA, 1–4 November 2009; pp. 371–375. [Google Scholar] [CrossRef]
- Park, J.-W.; Lee, J.-J.; Jung, H.-J.; Myung, H. Vision-based displacement measurement method for high-rise building structures using partitioning approach. NDT E Int. 2010, 43, 642–647. [Google Scholar] [CrossRef]
- Nayyerloo, M.; Chen, X.; Chase, J.; Malherbe, A.; MacRae, G.A. Seismic structural displacement measurement using a high-speed line-scan camera: Experimental validation. N. Z. Soc. Earthq. Eng. Conf. 26–28 March 2010. [Google Scholar]
- Jurjo, D.L.B.R.; Magluta, C.; Roitman, N.; Gonçalves, P.B. Experimental methodology for the dynamic analysis of slender structures based on digital image processing techniques. Mech. Syst. Signal Process. 2010, 24, 1369–1382. [Google Scholar] [CrossRef]
- Choi, H.S.; Cheung, J.H.; Kim, S.H.; Ahn, J.H. Structural dynamic displacement vision system using digital image processing. NDT E Int. 2011, 44, 597–608. [Google Scholar] [CrossRef]
- Chang, C.C.; Ji, Y.F. Flexible Videogrammetric Technique for Three-Dimensional Structural Vibration Measurement. J. Eng. Mech 2007, 133, 656. [Google Scholar] [CrossRef]
- Jeon, H.; Bang, Y.; Myung, H. Measurement of Structural Displacement using Servoed Paired Structured Light System. Seoul 2011, 20, 189–192. [Google Scholar]
- Myung, H.; Lee, S.; Lee, B. Paired Structured Light for Structural Health Monitoring Robot System. Struct. Health Monit. 2010, 10, 49–64. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Examples/Cases of Its Use | Description | |
|---|---|---|
| Pre-event | Pre-event building and structural monitoring. | The system can be installed in residential buildings and critical facilities. It exploits ambient seismic noise and micro-earthquakes to characterize the seismic response of the monitored structure in order to constrain or update its structural fragility model [8]. |
| Pre-event landslide monitoring and early warning. | Landslide potential can be assessed using a network of nodes equipped with high precision GNSS and seismic sensors. The system can be used to obtain further data on the soil structure (by 3D tomographic analysis of the target area) and to detect and monitor mass movements [9]. The resulting information would then be sent to the appropriate users while warnings may be issued and other emergency measures supported. | |
| Site amplification assessments | Information on the subsoil structure, and in particular the local S-wave velocity profile and the so-called Vs30 can be extracted from seismic noise array measurements [3]. | |
| During event, post-event | On-site earthquake early warning. | The system detects the first ground motion on-site and estimates the potential maximum shaking at the node level (e.g., at critical facilities such as hospitals, industrial plants, gas pipelines, etc.), allowing local emergency measures to be automatically conducted for loss mitigation [5,6,7]. |
| On-site earthquake damage forecasting. | The system can be installed in order to cover one or more buildings (one or several nodes for each building). A structural fragility curve for the monitored building (or an approximate model) is embedded at the node level, leading to the ability to forecast the extent of damage to the building, starting from the early shaking. If the system forecasts severe structural damage, a warning is issued and emergency measures can be undertaken [5,6]. | |
| Emergency communications. | The flexibility of the system can be exploited following the occurrence of an event to set up local emergency voice and data communication networks, both to connect different critical facilities and to support the operations of civil protection authorities [10]. | |
| Earthquake post-event building tagging. | The damage that the system forecasts during shaking can be detected by comparing the frequency response of the structures before and after the event, or by using the on-board camera to detect a permanent drift of critical load-bearing structures. The system may then provide a preliminary tagging of the monitored building to facilitate civil protection operations. For instance, a building could be automatically issued a “red tag” if structural damage is detected, with a signal/alarm sent to the occupants warning them to leave the building, while also issuing a “priority for inspection” warning to reconnaissance personnel [11]. | |
| Flood monitoring. | The system, when equipped with water-level measuring sensors, can monitor the evolution of a flood over both local and regional scales. An in-situ network could be deployed rapidly during the first onset of a flood, and be used to validate stochastic inundation scenarios and provide ground-truth for wide-scale assessments based on remote sensing approaches [12]. |
| Components | Regional and On-Site (i.e., Decentralized) Earthquake Early Warning | Rapid Response Support | Building and Structural Health Monitoring | Site-Effect Estimation (Use of Two Dimensional Arrays) | Other Applications | |
|---|---|---|---|---|---|---|
| Acquisition | External sensors (Broadband, Strong Motion, or Geophone) | √ | √ | √ | √ | Landslide monitoring |
| Internal MEMS sensor | √ | √ | √ | Landslide monitoring | ||
| Full HD camera | √ | Landslide, water levels monitoring | ||||
| GNSS receiver | √ | √ | Landslide monitoring | |||
| Temperature and humidity sensors | Meteorological observations | |||||
| Communication | LAN | √ | √ | Response to any other hazardous events | ||
| WLAN including self-organizing wireless mesh network topology | √ | √ | √ | √ | Response to any other hazardous event | |
| Mobile communication (UMTS, LTE) | √ | √ | Response to any other hazardous event | |||
| Processing | Node level | √ | √ | √ | Other hazardous events (landslides, floods) | |
| Network level | √ | √ | √ | √ | Other hazardous events (landslides, floods) |
| Number of channels | 3 or 6 |
| AD converter resolution/effective resolution | 24 bit, typ. 21.5 bit @100 Hz sps @gain 1 |
| Gain | 1, 2, 4, 8, 16, 32, 64 |
| Sample rate | 800 (1ch-mode), 400, 200, 100, 50 sps |
| Input impedance | 100 kOhm |
| Input voltage range | 5–24 V |
| CPU | 1.8 Ghz quad core ARM processor and 1.4 Ghz quad core ARM processor |
| RAM (random access memory) | 2 Gbyte LPDDR3 RAM at 933 MHz |
| Operating system | GNU/Linux |
| Storage | eMMC5.0 HS400 Flash Storage or micro SD |
| Power consumption | 3–5 W |
| User interface | Tri-color RGB LED to display the status of operating system, Standard Micro-HDMI, supports up to 1920 × 1080 resolution |
| IO Ports, Possible expansions | 30Pin : GPIO/IRQ/SPI/ADC |
| Connectivity | USB 3.0 Host × 2, USB 2.0 Host × 1, Ethernet RJ-45 |
| MEMS sensor | ±2 g/±6 g user selectable full-scale, Acceleration noise density (Vdd = 3.3 V; Full-scale = ±2 g): 50 μg/sqrt(Hz) |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Boxberger, T.; Fleming, K.; Pittore, M.; Parolai, S.; Pilz, M.; Mikulla, S. The Multi-Parameter Wireless Sensing System (MPwise): Its Description and Application to Earthquake Risk Mitigation. Sensors 2017, 17, 2400. https://doi.org/10.3390/s17102400
Boxberger T, Fleming K, Pittore M, Parolai S, Pilz M, Mikulla S. The Multi-Parameter Wireless Sensing System (MPwise): Its Description and Application to Earthquake Risk Mitigation. Sensors. 2017; 17(10):2400. https://doi.org/10.3390/s17102400
Chicago/Turabian StyleBoxberger, Tobias, Kevin Fleming, Massimiliano Pittore, Stefano Parolai, Marco Pilz, and Stefan Mikulla. 2017. "The Multi-Parameter Wireless Sensing System (MPwise): Its Description and Application to Earthquake Risk Mitigation" Sensors 17, no. 10: 2400. https://doi.org/10.3390/s17102400
APA StyleBoxberger, T., Fleming, K., Pittore, M., Parolai, S., Pilz, M., & Mikulla, S. (2017). The Multi-Parameter Wireless Sensing System (MPwise): Its Description and Application to Earthquake Risk Mitigation. Sensors, 17(10), 2400. https://doi.org/10.3390/s17102400