This section firstly reviews the related work on Indoor Positioning Systems (IPS), paying special attention to WiFi-based fingerprinting positioning. Secondly, some related works on AAL are reviewed and compared. Finally, the main characteristics of our WiFi-based positioning system for AAL are presented.
2.1. Indoor Positioning Systems
Although there are some surveys which classify IPS [
10,
11,
12], these systems can be broadly classified into two main groups: those technologies that needs some infrastructure deployment, and those which do not need any infrastructure deployment, such as, for example, systems based on magnetic field fingerprinting [
13,
14]. In the same way, those technologies which need some infrastructure deployment can be subdivided in those which needs an ad-hoc deployment, for example systems based on Bluetooth Low Energy beacons (BLE) [
15]; and those which take profit of already deployed infrastructures, for example systems based on WiFi fingerprinting [
12]. An extensive review of Indoor Positioning Systems (IPS) can be found in [
16].
WiFi-based Fingerprint positioning systems are based on the Received Signal Strength Indicator (RSSI) level from the Wireless Access Points (WAPs). This technique is based on the fact that the signal loss due to path and penetration losses, reflection and refraction effects is complex enough to be modeled as a function of location. Instead, WiFi fingerprinting assumes that a signal mapping exists and that such a map can be reconstructed measuring the RSSI signal at discrete locations of the mapped area. WiFi fingerprinting consists of two stages, in the first stage, for each mapped position
a vector of all detected RSSI signals
, where
is the number of total WAPs present in the whole mapping area. The pairs of all measures and the vector of RSSI signals
is the WiFi fingerprint database. In a second stage or system operation, a vector of RSSI signals is measured
and compared, using some similarity metrics, with the RSSI vectors in the database. In its basics form, the location assigned to the vector
is that which provides the minimum distance for the chosen metrics [
17], namely
. In reference [
18] the authors present a complete analysis of distance and similarity measures for WiFi fingerprinting for indoor positioning system.
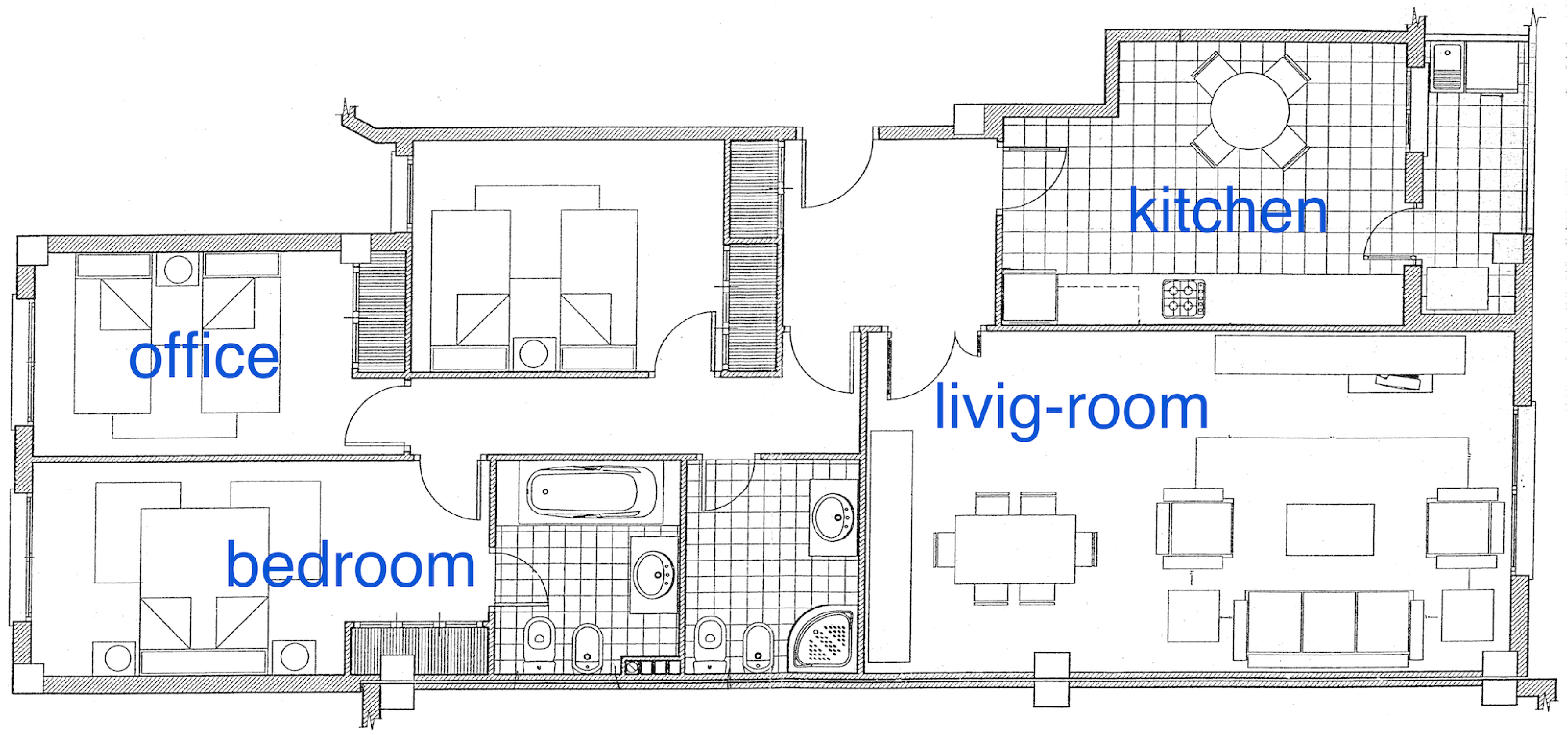
Instead of storing a position for each vector of RSSI signals in the database, a class where n is the total number of different classes, can be associated with each vector , in this case the fingerprinting database can be used to solve a classification problem: given a vector of signal an estimate of the class should be provided. In this paper the latter representation has been used, where classes are the rooms in an apartment, for example .
One of the major advantages of the methods based on WiFi fingerprints is that they rely on the already existing WiFi infrastructure. Therefore, the location of the user can be obtained without deploying any additional infrastructures. However, WiFi was not designed as bases for indoor positioning. Taking into account the existing obstacles introduced by the indoor environment (including reflections and multi path interference) the spread of radio signal in indoor environments is very hard to predict [
19]. In addition, in WiFi-based positioning systems, the user typically carries the device with him. His motion or how the device is carried are an important factor that affects the measured RSSI values [
20]. For an extensive study and comparison of different IPS based on WiFi fingerprinting the reader can review [
12].
2.2. Indoor Positioning Systems in Ambient-Assisted Living
There are papers that review the works presented in the field of AAL, some of the reviews focus on works directly related with fall detection, while others focus on wearable sensor based systems. Axisa et al. [
21] present a review of smart clothing technologies for health-care, illness prevention and citizen medicine. These technologies are based on devices directly attached to the human body and are able to measure some physical constants as skin temperature and conductivity. Some of the reviewed solutions can also determine the location of the user inside a building and to use Global System for Mobile communications (GSM) smartphone networks to notify alarms. It is worth noting that most of the reviewed works in this paper are proprietary solutions.
User requirements for wearable health monitoring sensors are analyzed in reference [
9]. From the authors point of view, the most challenging points when developing wearable sensors for in home health monitoring are: reliability and robustness, unobtrusiveness, user identification, communication, zero maintenance and fault recovery. Communication approaches are reviewed in detail as they play a central role in the independence of living in a home.
A survey of fall detection methods is presented in reference [
22]. These methods can be grouped into three main categories depending on the technology used: wearable device, ambiance device and camera-based. All of these methods have multiple drawbacks and require the user to acquire some special equipment or accessory, such as wearable sensors or video cameras.
Taking into account the previous classification, the most representative works are commented upon. To recall, the ambiance device approach is to use a variety of sensors installed in the house. These sensors detect when a person is close enough and, therefore, detect the location of the person. In reference [
23], InfraRed (IR) sensors are used to monitor the presence in rooms with no doors, while magnetic switch sensors are used in rooms with doors. Falls are detected using an ad-hoc sensor which bases its operation on the data fusion coming from three different sensors: accelerometer, tilt and vibration sensors. All information is transmitted using RF signals to an in-home or remote processor unit. IR and magnetic switch sensors are cheap, but the ad-hoc sensor to detect falls could be expensive. Communications are performed using RF, so some adapter device would be needed to interconnect them to the Internet. Demongeot et al. present in reference [
24] a system to monitor patients at home. Passive InfraRed (PIR) sensors attached to each room are used for patient location, generic accelerometer sensors are used to detect falls, and specific sensor are used to measure the respiratory rhythm, blood pressure and cardiac parameters. Communications between sensors and a processor unit are established by means of the Controller Area Network (CAN) [
25]. XML format is used to transmit and store data, but any other neutral language could be used, for example json or plain text. Data is taken each hour, and used to detect deviation from a predefined behavior which, in case it occurs, will fire some alerts. In reference [
26] a method for helping in the medicine intake management task is presented. This system checks the possible conflicts in the prescribed medicines of elderly people. The medicines information registration is automated using an RFID card. Additionally, the data of the system can feed other subsystems in a Smart House. The work in reference [
27] describes a flexible floor-based indoor positioning system. This system is based on capacitive sensors that are specifically designed to detect position and potential falls of users at home. They use passive floor mats of a rectangular shape equipped with active sensor elements on two adjacent outer sides. In reference [
28], the authors have developed the n-Core Polaris system. This system defines a sensor network using Zigbee as communication protocol. The sensor network comprises tags, readers and sensor controllers. A web server connects to the readers and offers the position information to a wide range of possible client interfaces. A database is created to register historical data, such as alerts and location tracking. In reference [
29], the authors present the iLoc sytem, which uses an ultrasound ranging for indoor positioning. This system comprises badges, detector nodes (located at known fixed positions) and a server running the positioning algorithm. The badge is an ultrasound transmitter which emits ultrasound pulses. The detector nodes receive these pulses and send the reception times to the server. The server calculates badge position. The work in reference [
30] presents a method for indoor positioning using microwave signals. For this purpose, beacons and transponders are used. The beacons are located at some reference points. The transponders are attached to people’s objects. Each beacon selects the low frequency difference signals. Based on these measurements the distances to transponders are calculated. In reference [
31] a commercial indoor location system is used to infer models about user movements in a nursing home for allowing experts to understand individual behavior. The system uses bracelets periodically connected to beacons using the ZigBee protocol, which in turn are connected to servers using Ethernet protocols. All data collected is analyzed using data-mining techniques to find out user’s behavior, such as preferred location, and how this behavior changes over time. Virtual Butler [
32] is a location-aware human-machine interaction system which provides the interface between the elderly and the smart infrastructures. Passive Infrared sensors are used to detect the presence of the user in a room, in addition a bed presence is used to detect the user in bed. Based on the user location and an agent based architecture the system is able to answer questions made in natural language. A publish/subscribe protocol is used to interchange data between the agents in the system.
Some other works in the AAL field use some kind of wearable device plus a camera device. A smart home based health for monitoring diabetes patients is presented in reference [
33]. The system is able to integrate data coming from wearable sensor, environmental sensor (temperature, humidity, light, etc.) and cameras. Wireless communications are securely provided by means of Internet services. Analytic is used on the raw gathered data to recognize the activity of the monitored patient, and to give feedback to the patient in form of recommendations about food habits. The work presented in reference [
34] uses different data sources to note whether a person falls. These data sources consist of motion information, audio stream and video images. The data are obtained from wearable device such as overhead cameras, microphone arrays and body sensors. The analysis of this data can detects a fall. Furthermore, this system estimates the severity of the fall monitoring the data after the fall. It uses a ontology and rule-based evaluation for this purpose. Ozcan et al. [
35] propose another video camera-based approach for fall, sit and lying down detection. In this system, the user wear a CITRIC camera and the computation is performed by means of an embedded microprocessor. The image analysis method is based on the oriented image gradients, which takes into account the orientation of the camera frame during a fall.
A different approach is proposed in reference [
36]. Owl Positioning System (OwlPS) is a WiFi based system for indoor positioning. This system is composed of a smartphone, some WAPs, an aggregation server and a positioning server. The smartphone sends different packages and each WAP extracts the corresponding RSSI. Next, the aggregation and position server collects and analyses the packets and obtain the position of the smartphone.
In order to compare the formerly reviewed works, we propose the following characteristics as they well describe them in the context of AAL:
Sensor Type: refers to the type or types of sensors used for ambient monitoring.
Cost: the cost in terms of money and efforts to deploy the monitoring system. Scale: Expensive, Average, Cheap, Inexpensive.
Scalability: how easy it is to add new rooms/ambients to already monitored areas. Scale: High, Medium, Low.
Obtrusive: the feelings of the users about their privacy invasion: High, Medium, Low.
Connection: how the sensors are connected with the monitoring system. Scale: WiFi, Zigbee, Ultrasound, others.
Interoperable: could be the system described interconnected with other monitoring systems: glucose, heartbeat, and others. Scale: Yes/No.
Extensible: can be the system used in other kind of monitoring use. Scale: Yes/No.
Table 1 shows the classification of works reviewed according the above characteristics. The work in reference [
36] is the only one that uses WiFi capabilities present in a mobile phone for positioning a user. On the contrary, WiFi capabilities present in a smart-watch attached to the wrist of the user is used in our work. No new infrastructures are required for using our system, so the only cost is the acquisition price of the smart-watch, in contrast with systems where deploying some infrastructures is needed, for example those relying on cameras [
33,
34], beacons [
28,
30,
31], or infrared sensors [
23,
24,
32]. Most of the analyzed, including the presented work, scale well with the only exception of [
27] based on capacitive sensors. Obtrusive issues are mainly associated to the use of camera [
33,
34,
35], our system is unobtrusive, the user has only to wear a smart-watch which can be used as a simple watch. There is a great diversity in the connection used for each reviewed system, in the presented work WiFi connectivity is used. Most of the reviewed works are interoperable with other monitoring systems. With the exception of [
27] that uses sensors specifically designed, our work makes use of standards whenever possible, for example in the case of the MQTT connectivity protocol. In the same way, most reviewed works are extensible, so they can be applied to other uses cases, with the only exception of [
26,
27], the presented work could be easily used in any other where location will be a key aspect. The system presented in reference [
32] and ours use a publish/subscribe protocol, which is focused on Machine to Machine communications.

 ,
, 






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}