1. Introduction
High Precision Electrostatic Space Accelerometers (HPESAs) are the spaceborne measuring instruments of non-conservative accelerations of space vehicles. They had been and are the main payloads of geodetic satellites, such as the Challenging Minisatellite Payload (CHAMP), the Gravity Recovery, Climate Experiment (GRACE), the Gravity Field and Steady State Ocean Circulation Explorer (GOCE) [
1], the GRACE follow-on [
2] and space fundamental physics [
3,
4]. The next generation satellite to satellite tracking mission (GRACE-type) and gradiometer mission (GOCE-type) require performances of their HPESAs to be able to achieve the levels of 10
[
5] and
[
6], respectively. Moreover, spaceborne gravitational wave detectors, such as the Laser Interferometer Space Antenna (LISA) [
7] and the TianQin mission of China [
8], need inertial-sensor type HPESAs to play the role of geodesic references in the center of satellites. The TianQin’s accelerometers share the same principle of the capacitance sensor and electrostatic actuator with the one in geodetic missions, but have higher acceleration measurement precision of up to
. All of these state-of-the-art HPESAs, called the next generation electrostatic accelerometers, have noises close to the physical fundamental limits and, thus, call for novel designs of their feedback controllers.
A typical HPESA consists of a Test Mass (TM) and three surrounding pairs of electrodes to form the differential capacitances for both the position sensors [
9,
10,
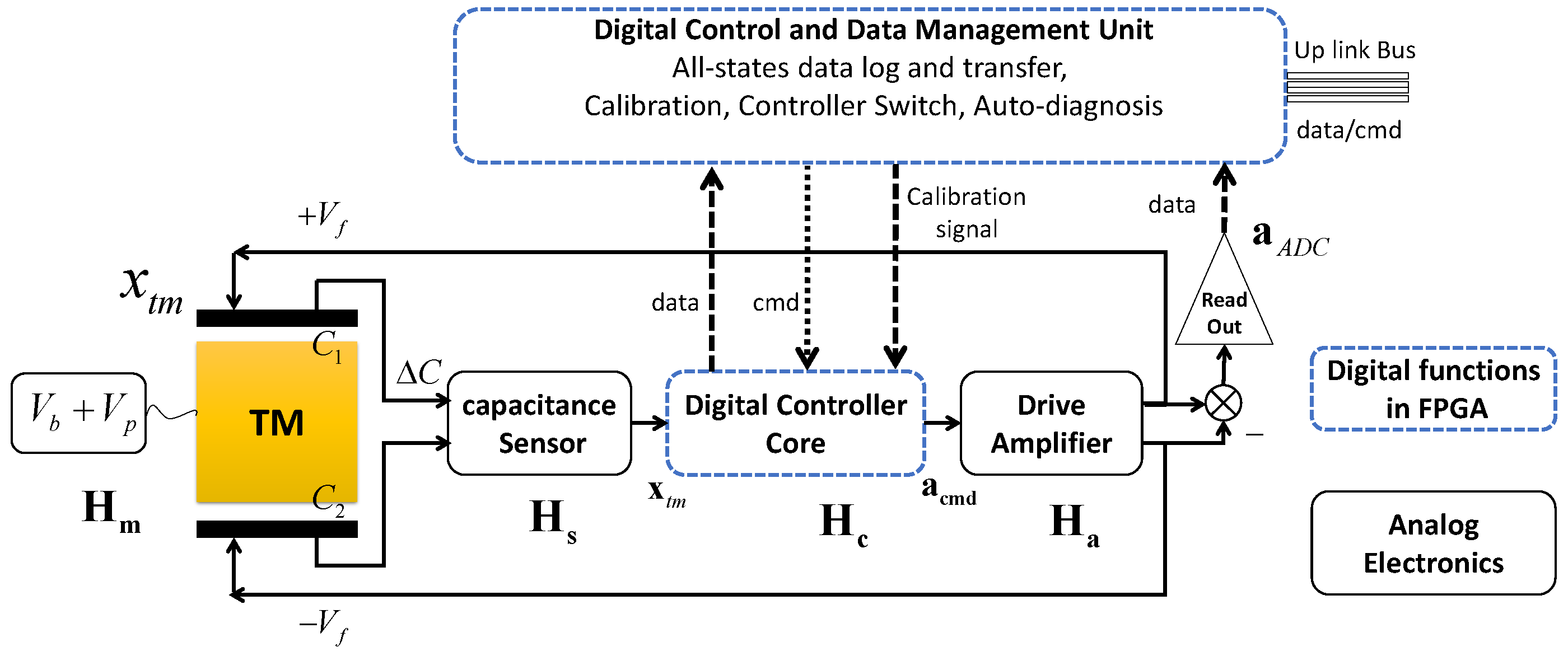
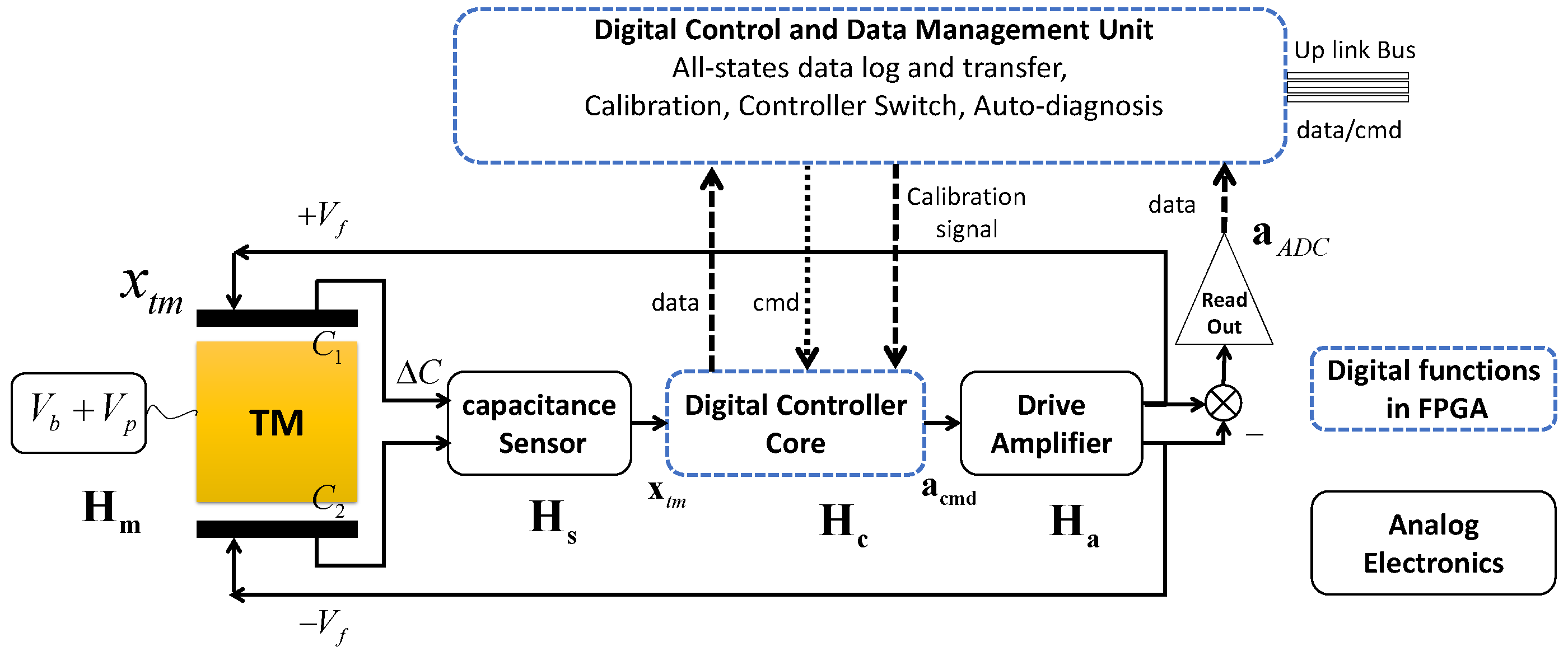
11] and the electrostatic actuators that balance the input acceleration. The simplified block-diagram of an HPESA is shown in
Figure 1. The actuation voltage commands are generated by a feedback controller, which is driven by the TM position measurements. As the core of instrument electronics, the controller is in charge of stabilizing the TM within a small range about the sensor cage center, also known as the equilibrium point, where the accelerometer attains the performance decided by the hardware noise floor. When the TM stays within this range, the nonlinearities of both the position sensor and actuation force are maintained at a negligible level, so that the feedback read out can accurately and linearly measure the accelerations applied to the accelerometer frame [
12].
The ultra-high resolution of the next generation electrostatic accelerometer could only be achieved after the on-orbit calibration of the scaling factor, bias and coupling factors, etc. Full-time monitoring of the working states is an essential function for instrument diagnosis and scientific measurement, which demands all motion information output of the TM. In this case, a “Digital Control and Data Management Unit” (DCDMU) in
Figure 1, which should have function modules including all state data log/transfer, controller switching for different working modes, as well as the in-orbit diagnosis/calibration, is designed for the next generation of HPESA. All of these functions indicate that the digital controller should be in a state observer-based form. The state observer in controllers will filter and output the TM motion states in real time and is the core block connecting these functions with the feedback servo of TM seamlessly, as shown in
Figure 1. In this figure, DCDMU is composed of a Digital Controller Core (DCC) in the feedback loop and a management unit, which are connected by three signal routes: data, cmdand calibration signal. This three routes are respectively responsible for scientific data logging and transfer, working mode switching command and calibration signal injection. The DCC and the whole DCDMU will be deployed in the same FPGA chip, and their detailed structures will be described in the following sections. This study was carried out to improve the performance and functions of the next generation Chinese HPESA built in HUST (Huazhong University of Science and Technology, China), whose flight model has been launched in 2013 [
10].
Traditional Proportional Integral Derivative (PID) controllers have been applied to the accelerometers of GRACE and the GRACE follow-on, as well as the GOCE’s electrostatic gravity gradiometer [
13], but their control algorithms are not systematically reported in the literature. Modern control theories, such as Kalman filter-based controllers and H-infinity controllers, have been adopted in many precision space missions, such as the attitude control system [
14] of the Microsatellite mission for the test of the equivalence principle [
15,
16] and the drag-free control system of the LISA-Pathfinder [
17]. The Kalman filter is based on the least-square procedure of states of the object variables in the time domain, but lacks a targeted design on full information about signal/noise spectral characteristics. On the other hand, H-infinity technology, which could be defined as a theory based on infinity norm in Hardy Space, guarantees an accurate design of the spectral characteristics of the controller transfer functions, but usually ends in complex high-order controllers.
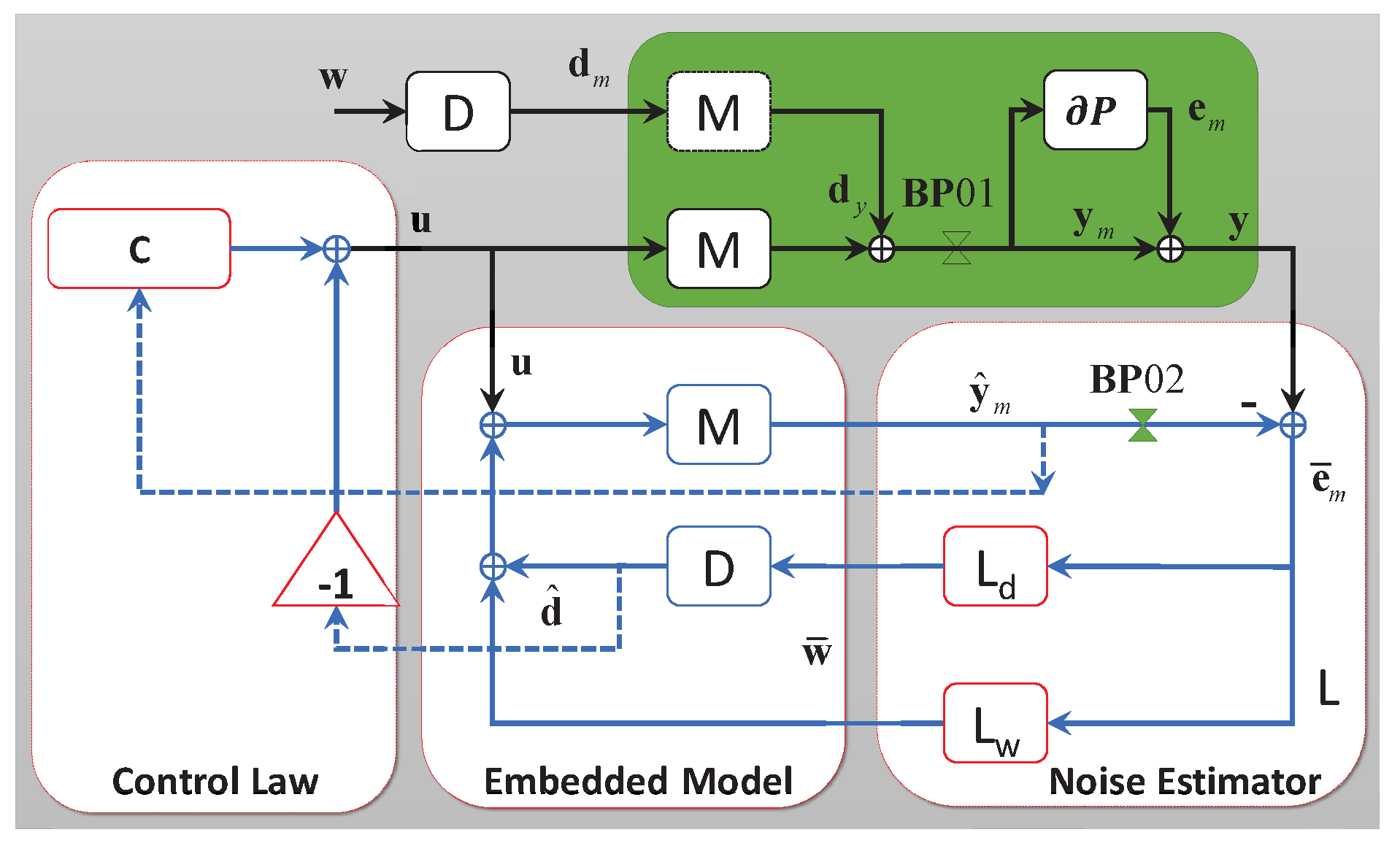
Embedded Model Control (EMC) [
18], which makes use of an extended disturbance observation and rejection scheme, has been well studied in the motion control system and has shown a great potential in precise frequency domain design. However, before tuning of EMC, equations describing the relations between the closed-loop poles’ location and dynamic feedback gains need to be derived case by case in the previous procedure. Therefore, rich experiences are required in the determination of the feedback gains in order to achieve the frequency performance goal, which is too complicated for ordinary users. In this work, a non-smooth optimization method based on numerical tools has been developed to avoid the complicated derivation process in EMC and has shown the abilities to directly design the closed-loop transfer function of controllers in various cases with a common program architecture. Moreover, this work also combines the state observer-based architecture of EMC with the H-infinity technology and, thus, inherits both the advantages of the optimized operations of physical states in the time domain and accurate frequency domain performances. In this paper, following the EMC guidelines, a state observer and the whole DCC have been designed based on an HPESA discrete time state space model in
Section 2,
Section 3 and
Section 4. The method of using non-smooth optimization for tuning the loop shape of the whole system is described in
Section 5. In
Section 6, the designed and tuned controller has been simulated with an end-to-end numerical model of the HPESA. The accuracy of the loop shape design and the flexibility of the design algorithm are pointed out. Conclusions of the work are presented in
Section 7. The nominal parameters of an HPESA from HUST designed for the future Chinese gradiometer mission are listed in
Table 1 as our study case.
2. Control Design Requirement
The relative dynamics of the TM can be described by the relation of
, where
is the relative position of the TM. When the command acceleration
precisely cancels the input acceleration
,
becomes negligible, so then
. The relation between
and the control voltage
is given by [
19]:
where
,
,
,
and
represent, respectively, balance capacitance, TM mass, balance gap, bias voltage and the RMS of the modulation voltage. Their typical values are listed in
Table 1. Equation (
1) can be rewritten as:
with definitions of
as the scale factor and
as the electrostatic stiffness. In Equation (
2), the first term on the right-hand side is the nominal feedback acceleration
, which is proportional to the feedback voltage
; the second and third terms are respectively the linear stiffness coupling and the cubic acceleration term, which must be suppressed to a level below the acceleration noise floor
given by:
In this way, the performance of the feedback controller in terms of
must fulfill the following inequality in the Measurement Bandwidth (MBW):
where
is set as the redundancy factor and
is the maximal feedback voltage with its typical value listed in
Table 1. Here, the redundancy factor
α is used during the noise budget to leave enough margins for other noise sources that are not from the control system.
The acceleration noise floor
of a next generation HPESA for the gradiometer mission is defined by a piecewise spectral curve with a flat level of
in the measurement band from 5
–100
, a decreasing slope of −20
below 5
and an increasing slope of 40
above 100
. This increasing slope is caused by the second derivative of the flat noises of the position sensor:
(with
defined in
Table 1), which is not repeated in the definition of the
requirement. Using Equation (
4) and the parameters of
Table 1, the requirement of
can be fixed in the mid-frequency region of the acceleration noise (5 mHz–100 mHz) and continues the flat constant above 100
. Below this region (<5 mHz), its spectral bound follows the −20 dB/dec slope of
.
3. Model of The Electrostatic Accelerometer
The TM of the HPESA is a precisely-machined cubic titanium coated with gold. Stringent requirements of the squareness and parallelism between surfaces guarantee negligible cross-coupling coefficients between the three measurement axes. The accelerator control plant can be decomposed into three decoupled single-input single-output (SISO) dynamic systems. The transfer function of each SISO system can be subdivided into three main transfer functions, as illustrated in
Figure 1. In the figure,
is the transfer function of the TM motion dynamics in the mechanical sensor head;
and
are the transfer functions of the position sensor and of the actuator, respectively. Using
,
and
, the transfer function of the controller can be designed on the basis of the closed-loop requirements.
Since the bandwidth of
and
is close to 300 Hz, which is far above the 10-Hz sampling rate of the accelerometer scientific data [
20], they are approximated by static and unit gains, so that
and
. Then, the whole actuator-to-sensor dynamics
can be approximated as equal to the TM motion dynamics:
. The correct discrete-time model of
is essential for the controller design. The relative motion dynamics of TM inside the capacitance cage, which is accounted by
, is given by:
where
is the sum of all input accelerations to be measured and
represents the feedback acceleration commanded by the actuator. Equation (
5) can be expressed in a discrete time state equation as follows:
In this plant,
in the plant state vector
is the relative speed of the TM,
is the sampling time of the digital control loop,
is the control command input and
is the model output corresponding to the position of the TM.
,
,
and
are the state matrix, control input matrix, disturbance input matrix and measurement output matrix, respectively. Here,
is the acceleration disturbance to be measured and should be eliminated completely. Accurate estimation of
could be directly used as the measurement output, and its elimination is the main scope of this control system. Detailed modeling of
will be discussed in the following section (
Section 4.2). Equation (6) will be used as the embedded model of the controllable dynamics of the plant in the next section. The transfer functions
and
are treated as neglected dynamics during the controller design while explicitly included in the fine numerical simulation model of the whole system. The spectral densities of the position sensor noise and of the actuator noise are given in
Table 1.
5. The Accelerometer EMC Tuning Using Non-Smooth Optimization
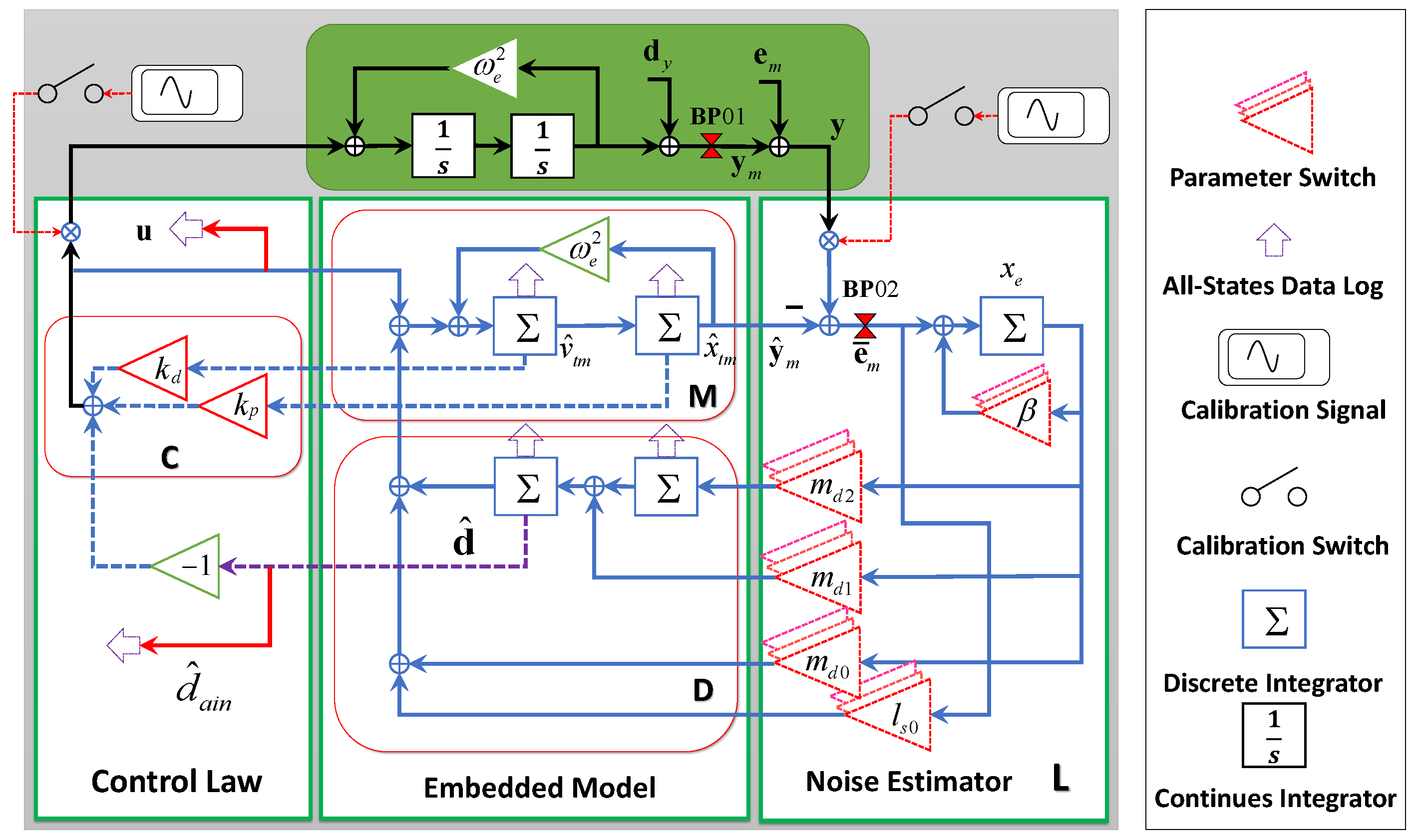
After building the main DCC structure in
Figure 3, the tunable parameters include in total
,
and
β: five parameters. As explained in the previous sections, the locations of the pole/eigenvalues of the state equation are the tie between the tunable parameters and the closed-loop transfer functions
and
. In [
18,
26], several equations are given for computing the asymptotic loop shape of
and
, but to the authors’ knowledge, the final accurate design is still that of trial-and-error and requires some practical experience.
On the other hand, algorithms for solving structured H-infinity optimization problems have been available in the control literature since 2005, based on the non-smooth optimization [
27,
28] whose numerical tools are integrated in a MATLAB toolbox [
29]. In the classic H-infinity synthesis, controller design is usually generated by the algorithm itself during the calculation, the orders of which are the sum of the plant and weight functions. The non-smooth optimization technique makes it possible to design structured controllers that are inherited from other practical cases, including the EMC, without changing the controller software architecture [
15]. This technique may utilize H-infinity theory for accurate transfer function design by avoiding the loss of performance or of the stability margin during the order reduction of non-structured H-infinity controllers.
In our case, the core of EMC design is to adjust the five tunable parameters to design the loop shape of
and
. By applying the H-infinity theory with the help of the non-smooth optimization technique, the design procedure of EMC can be solved as a standard non-smooth optimization problem, which can be expressed in the following form:
where
is the assembly of tunable parameters,
and
are weighting functions of
and
, that are the reciprocal of the design target of the
and
loop shape, and
represents H-infinity norm. When the optimization algorithm reaches
, the singular values
σ of
,
,
and
fulfill the following inequality:
where
represents the upper boundary of the singular value matrix and turns out to be a scalar magnitude frequency response in the SISO case. In this way, the target loop shapes of
and
can be bounded by
and
.
Designing the magnitude of the sensitivity function and of the complementary sensitivity at the same time is called the “mixed sensitivity loop shaping” that is equivalent to the open-loop transfer function design. It is usually known as “open loop shaping” because of Equation (
13) within the robust control theory. For the EMC state predictor design, in order to avoid some cases where the two functions
and
are designed to be incompatible with each other, the optimization target is re-decided by using a self-consistent open-loop shape function
(nominal loop target) for simplicity purposes, rather than setting
and
separately. Besides
, a cross-frequency tolerance factor
is applied to shift the
function curve to either lower or higher frequency and helps to obtain a pair of final loop shape boundaries
and
. Then, with a proper choice of
, the loop shape constraints will be equivalently transformed into the mixed sensitivity bounds as follows:
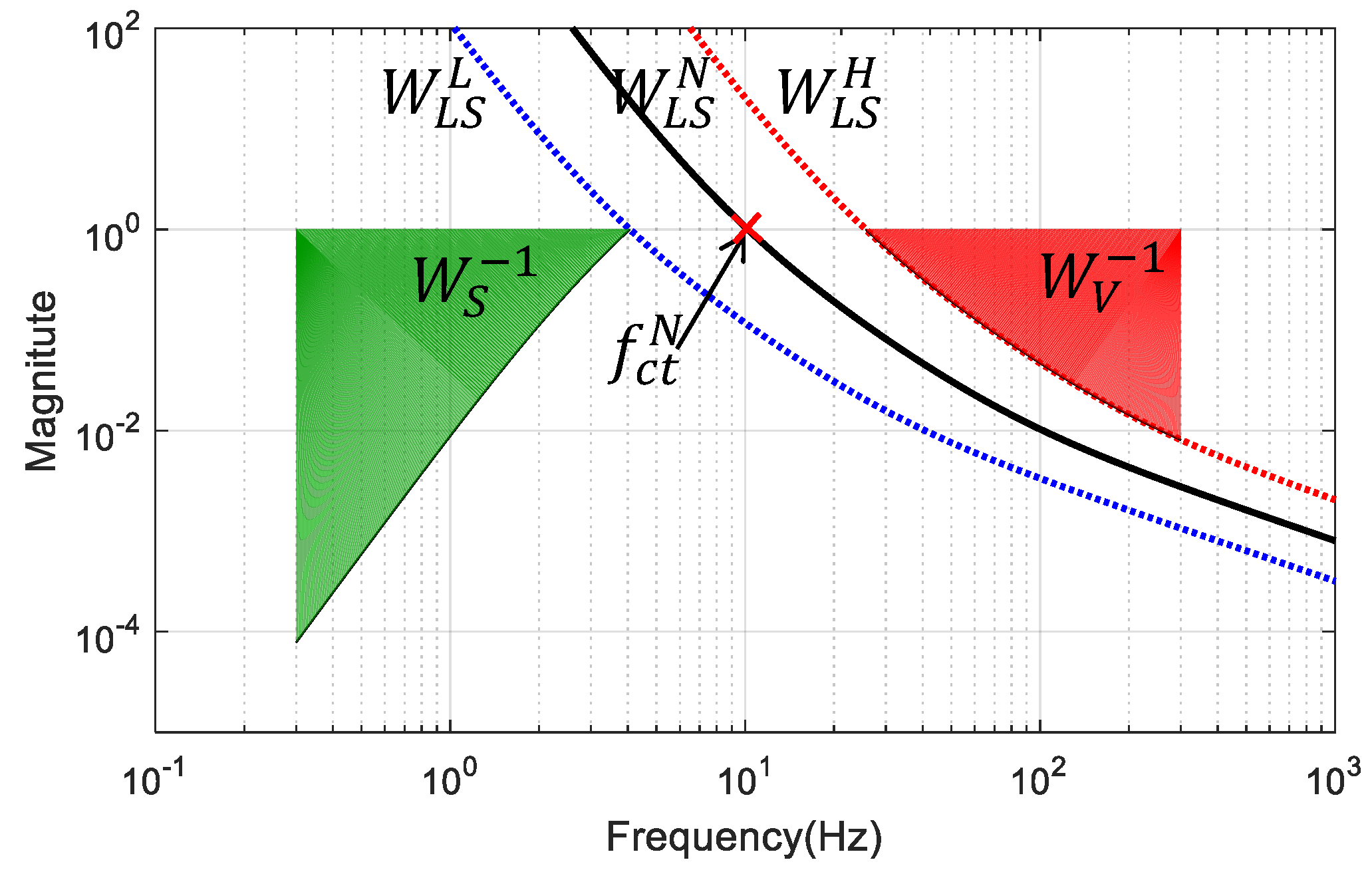
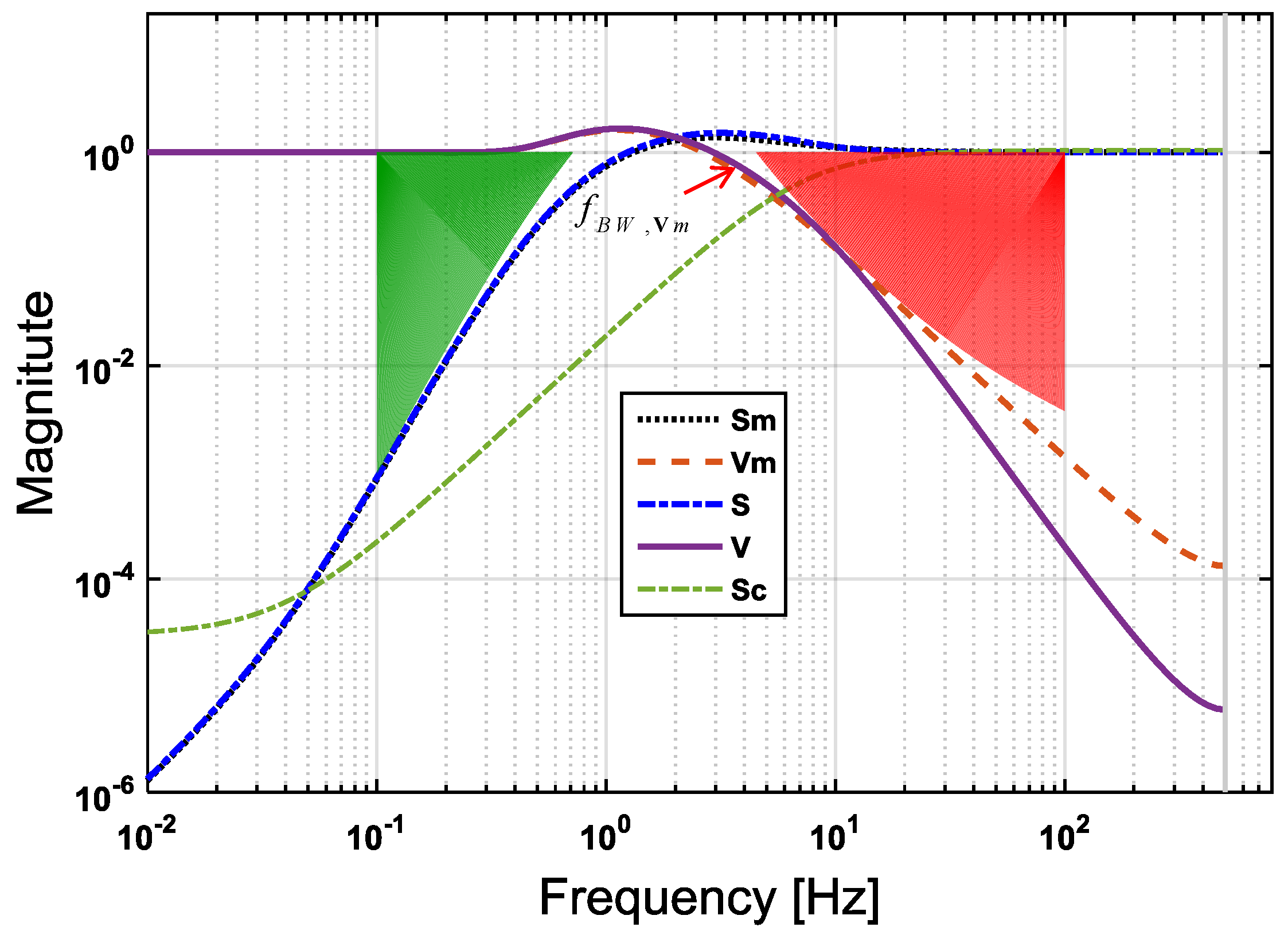
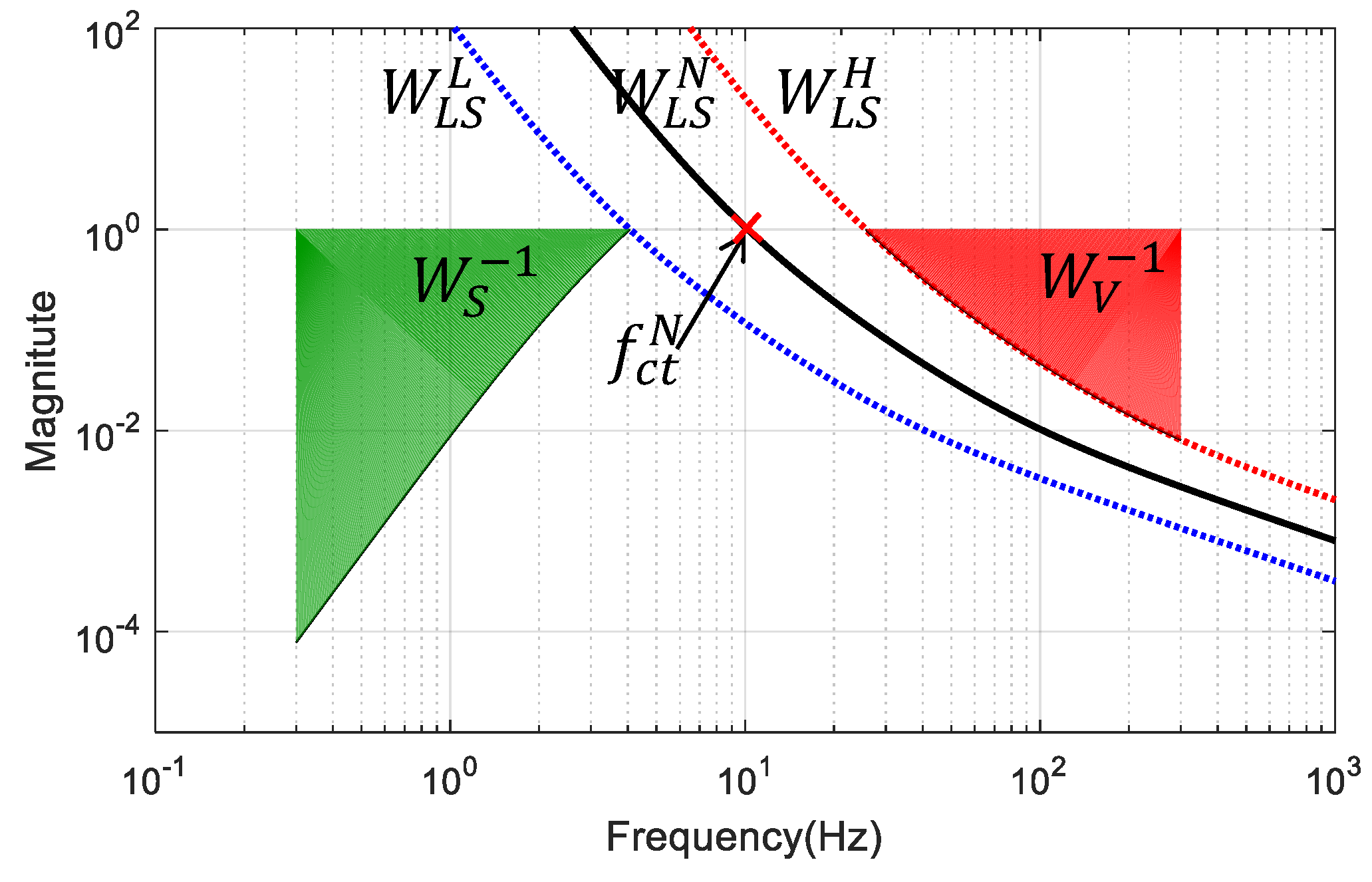
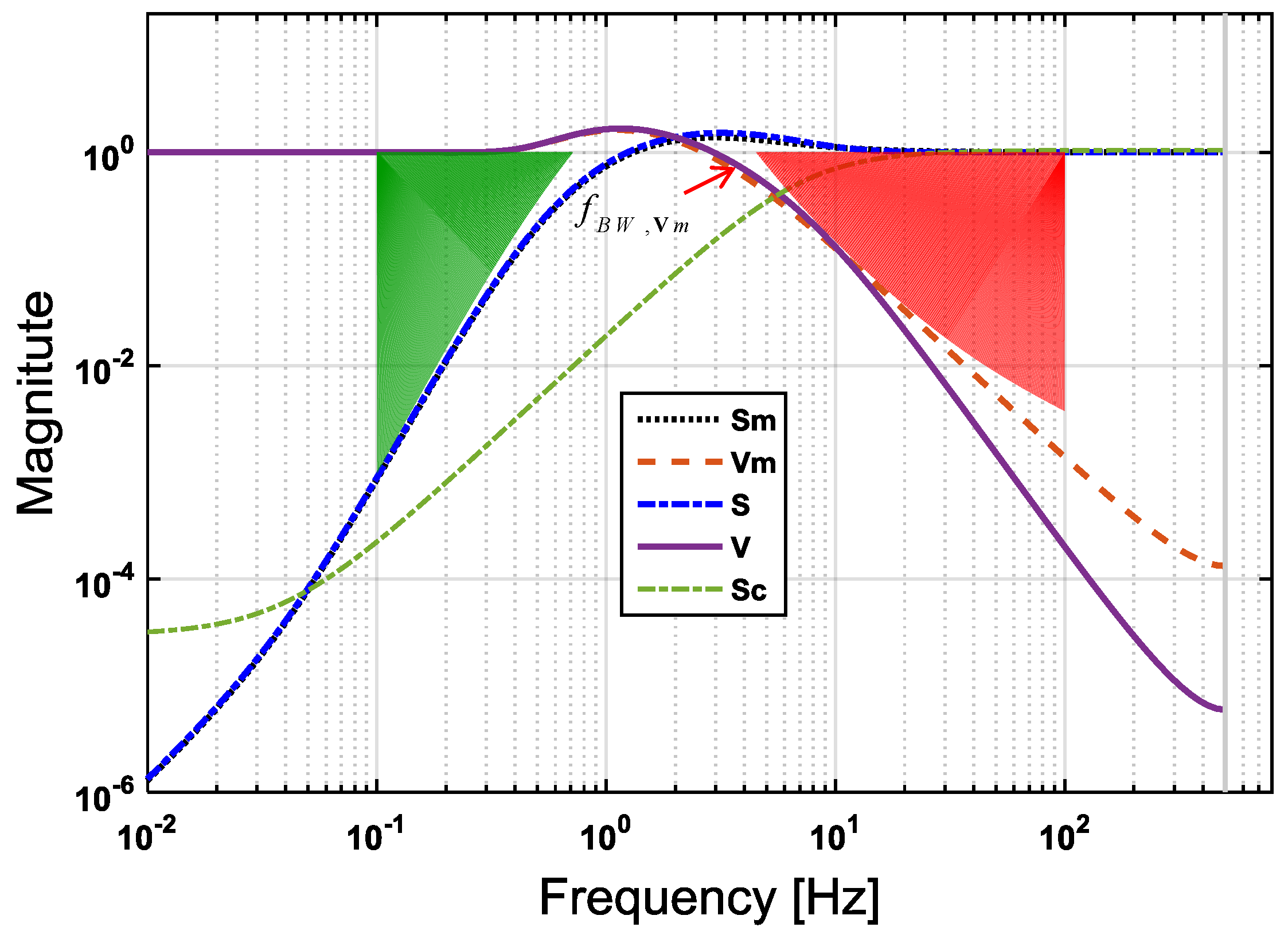
Here, a target loop shape, which could guaranty an 80-dB/dec disturbance rejection in the low-frequency domain, as well as at least up to −20-dB/dec roll-off in the high-frequency domain, is used:
where
is the target cross-over frequency. The calculation process of this final target loop shape is illustrated in
Figure 4, in which the complementary sensitivity boundary
is obtained by the
function in the high-frequency range, and the sensitivity boundary
is obtained by the reciprocal
function in the low-frequency range. These two boundaries decide the green and red areas of
Figure 4, which means that the resulting
and
should be constrained to stay outside of these forbidden areas according to Equation (
18). The trade-off between disturbance rejection and robustness can be precisely adjusted by tuning
in Equation (
20). The tolerance factor
is empirically set to 2.5 here in order to leave enough space to the optimization routine for searching a compromise between low- and high-frequency performance, as well as for preventing transfer function overshoot.
As explained in
Section 4, the state feedback gains
could be tuned using simple PD feedback after choosing a sufficient wide control loop bandwidth. Here,
,
is set, which corresponds to a 10-Hz cross-over frequency of ideal control loop
.
Figure 5 shows an example of how to optimize the loop shape for EMC state predictor design. In this figure,
is set to 2 Hz. After running the optimization routine, the resulting magnitude of the transfer functions,
and
, as well as
and
, are clearly bounded by the colored forbidden areas in
Figure 5. The discrepancy between
and
,
and
looks negligible in regions where the condition
is fulfilled. The overshoot of
and
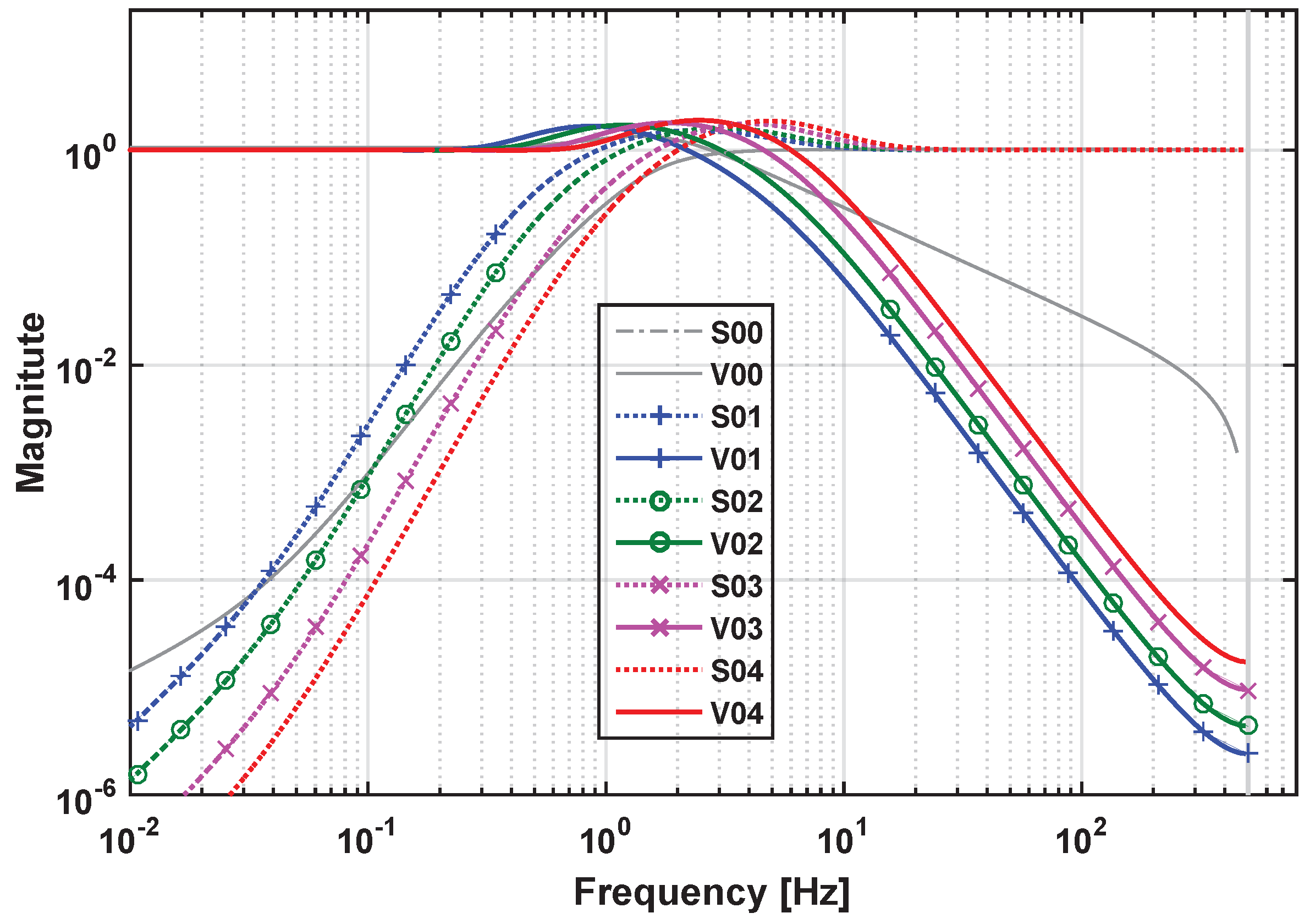
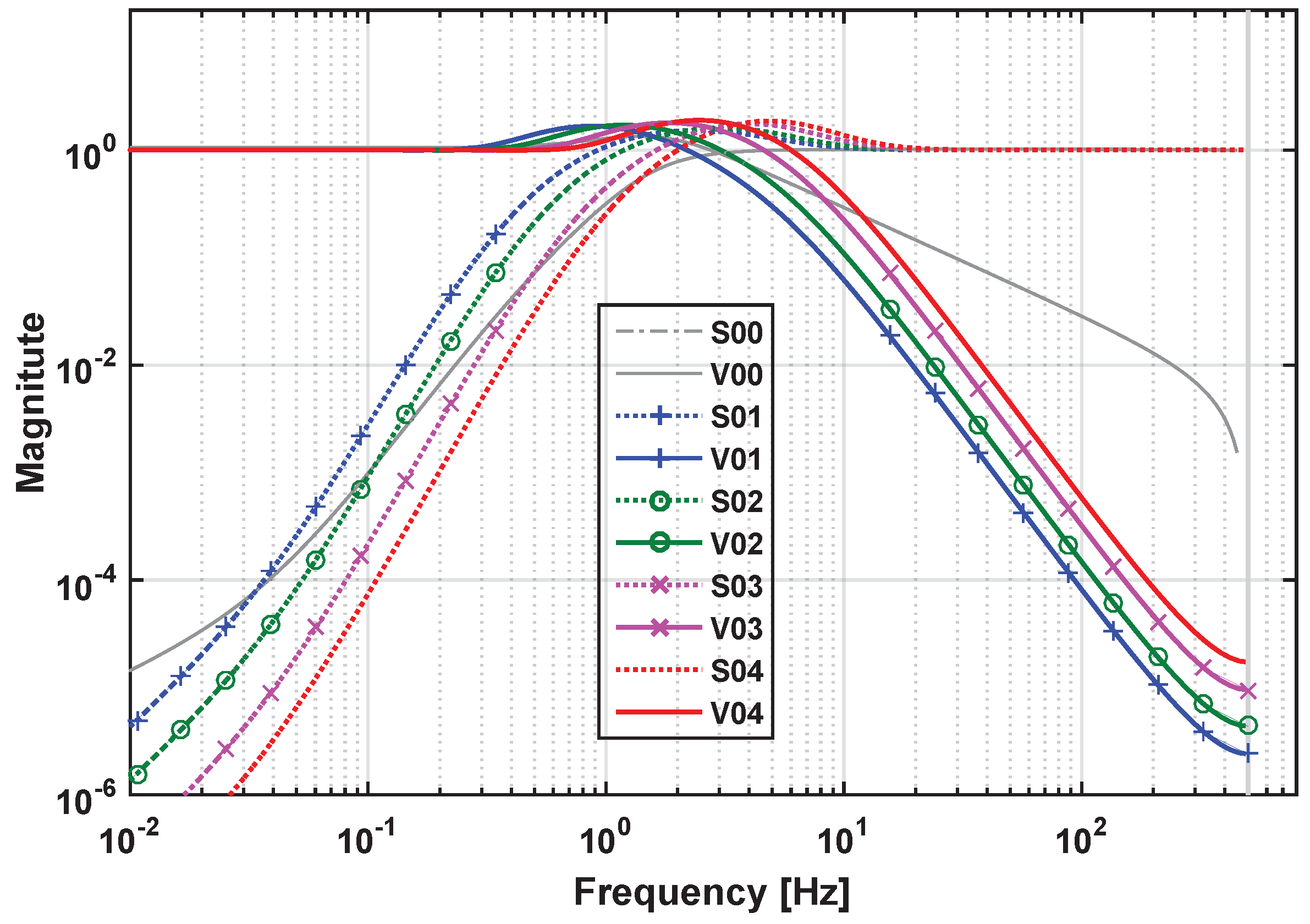
is below 5 dB ensuring the adequate system stability margin. When
varies from 1.5 Hz–4 Hz, four designed
and
that are labeled ctrl01, ctrl02, ctrl03 and ctrl04 respectively, smoothly shift, as shown in
Figure 6, and maintain the same slopes as the target functions. With the optimized parameters that are shown in
Table 2 for these four controllers, their frequency performances are listed in
Table 3. For the comparison, a classical PID controller that has the same cross-over frequency as ctrl03 is also plotted in
Figure 6. Better disturbance rejection at 0.1 Hz can be observed by comparing the
curve of ctrl03 (EMC) with that of ctrl00 (PID, with parameters:
= 119,
= 191,
= 18.3). From
Table 3, it can be seen that the sensitivity
, also known as the disturbance rejection gain of ctrl03 at 0.1 Hz, is −75 dB, which is 14 dB better than that of ctrl00. This disturbance rejection strength increases with the decreasing of frequency and is found to be 34 dB better than that of ctrl00 at 0.01 Hz in this study case. The explanation is that in EMC, the second-order disturbance model acts as a double integrator giving a higher open-loop gain slope of up to 80 dB/dec. Moreover, the roll-off slope of the complementary sensitivity
in high frequency (20–500 Hz) is also better for ctrl03 than that for ctrl00 and, thus, improves the rejection performances of both the sensor noise and the high-frequency model uncertainties. Here, the bandwidth
in
Table 3 is defined as the frequency where the magnitude of
is equal to −3 dB, whose relative position is also pointed out in
Figure 5 for a clearer demonstration.
Key design steps and the related MATLAB functions (in bold font) are listed for readers to reuse this work:
Step 1: Build the Simulink model following
Figure 3, where the signal names must be inserted;
Step 2: Build the optimization target functions using TuningGoal.MaxLoopGain for and TuningGoal.MinLoopGain for ;
Step 3: Use slTuner to define tunable parameters in the Simulink model;
Step 4: Use systune to start optimization with output of Steps 2 and 3.
By continuously tuning with a tiny step, e.g., 0.1 Hz, a lookup table of the corresponding optimized DCC parameters (, , , and β) at different in the same EMC controller structure can be generated. In this way, the researchers can focus on final tuning of the controller by looking up the table with new significant tunable parameter , which is closer to the physical meaning compared to , and in PID tuning.
6. Simulation Results
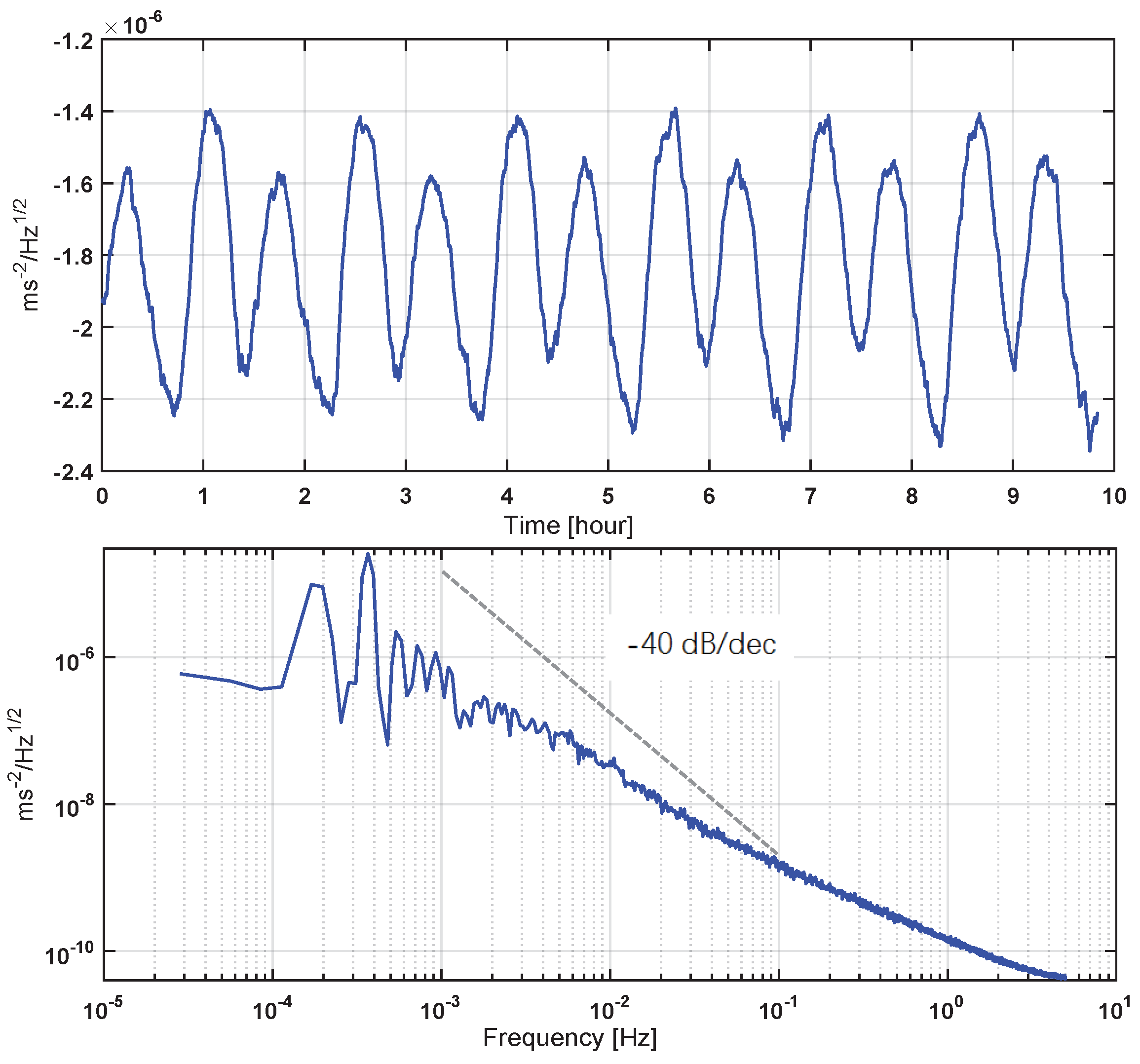
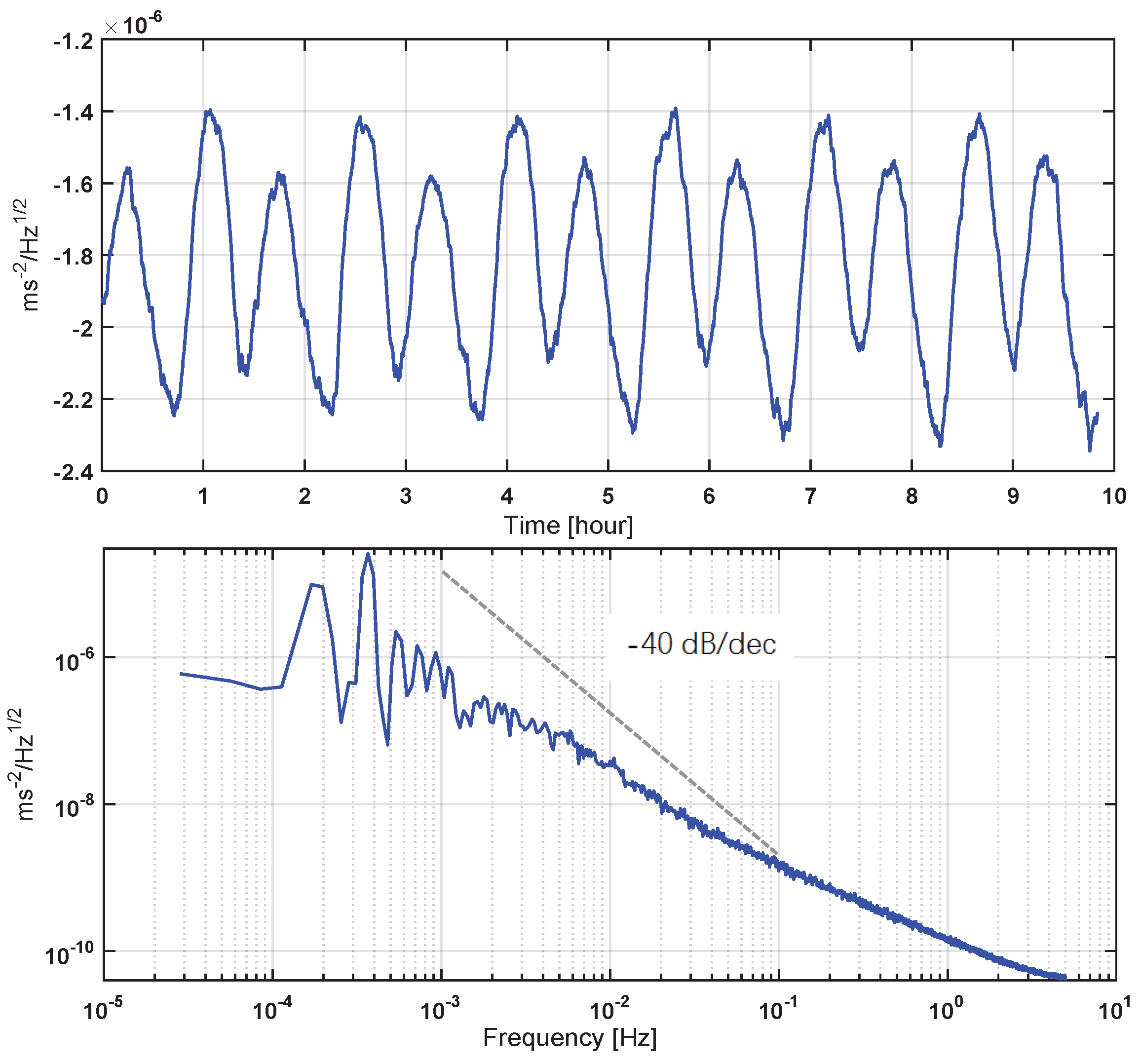
Simulated results were obtained from an end-to-end accelerometer numerical simulator developed in the MATLAB/Simulink environment, where the nonlinearity of the mechanical sensor head, the hardware transfer functions, as well as the noises are included. A segment of acceleration that is produced by orbit propagation and air-drag calculation of low-Earth-orbit satellites (like GRACE) with a decreasing PSD from 1 mHz to 5 Hz has been generated as the simulation input. This acceleration input is shown in
Figure 7 in both the time and frequency domains, and its magnitude has been adjusted with respect to the instrument measurement range, with the peak input acceleration of about
.
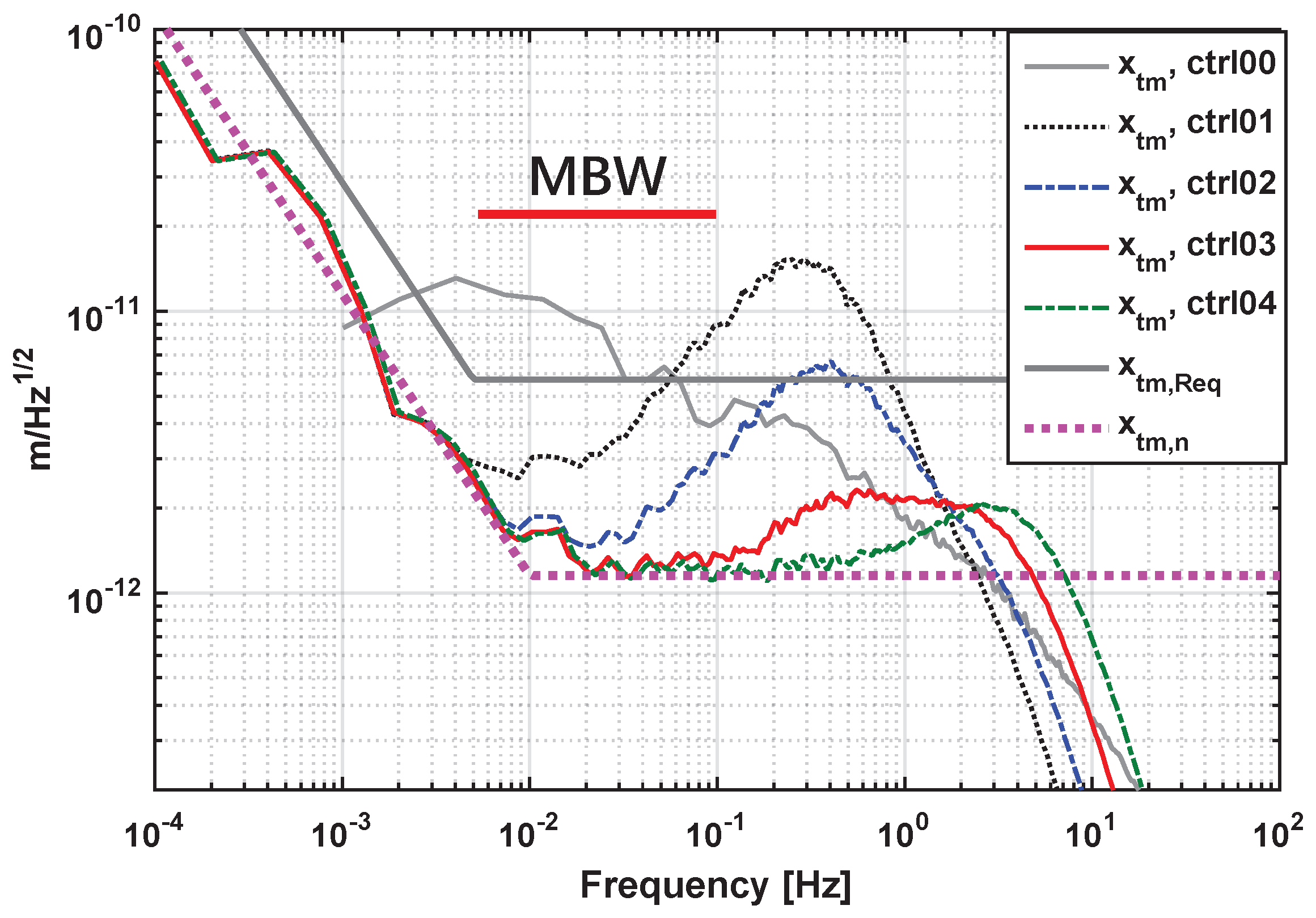
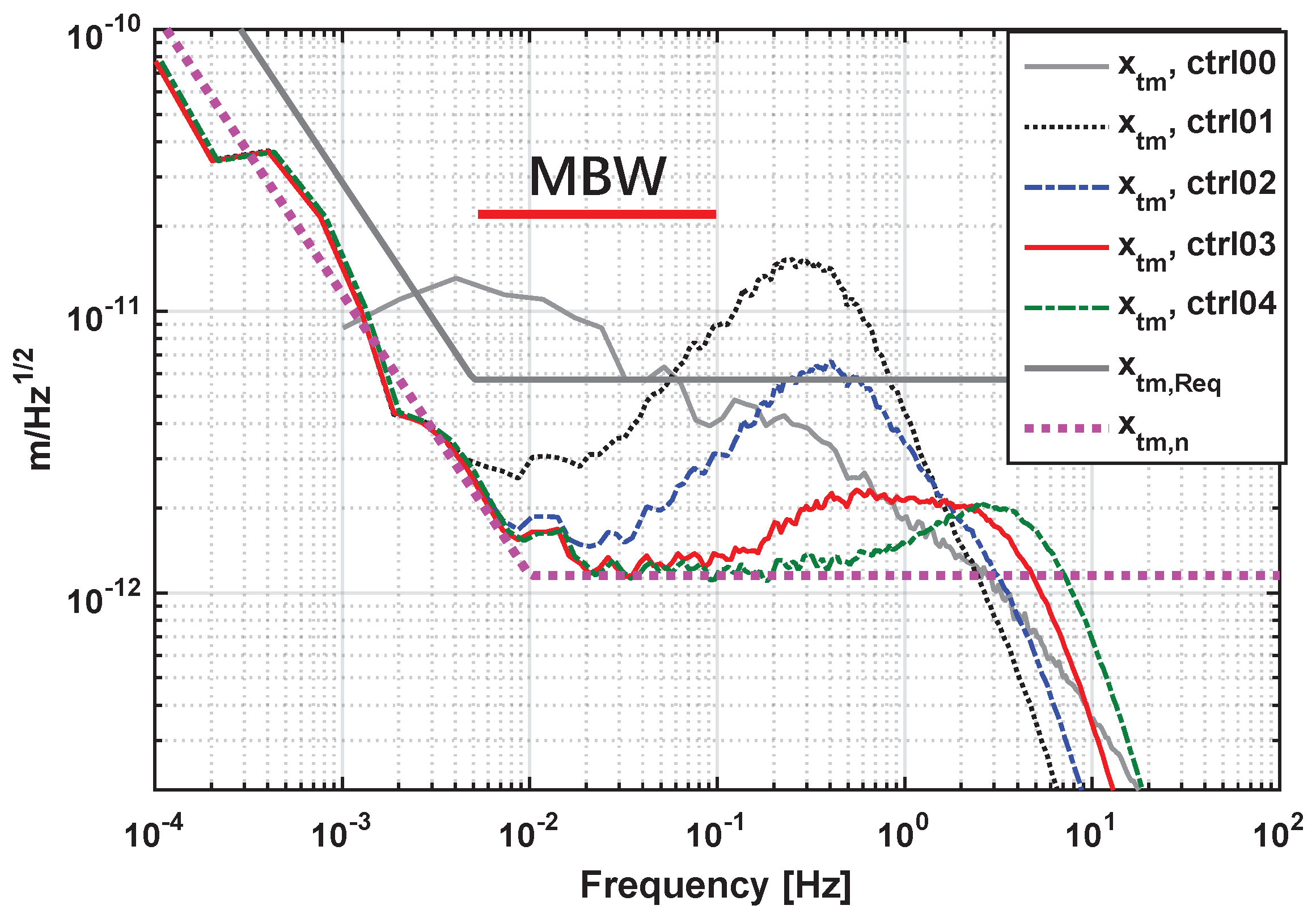
Simulation results of PSD of the TM position
, as the main performance criterion explained in
Section 2, are shown in
Figure 8. In this figure, the control performances of a PID controller, as well as four EMC controllers designed with different
are compared, whose transfer functions are plotted as “ctrl00” to “ctrl04” in
Figure 6, with all of the possible noise sources considered. In this work, EMC controllers have been only compared with PID because PID is the most common and widely-used controller in various applications. Further performance comparisons of EMC with other more sophisticated controllers will be studied in future works. In
Figure 8, it could be seen that the
PSD performance of the EMC-designed controllers within the measurement band (MBW) is significantly improved with increasing
. Controllers ctrl02–ctrl04 could meet the control design requirement defined by Equation (
4) (grey solid line of
Figure 8) within MBW. In comparison, the EMC controller “ctrl03” (with
= 3 Hz) shows a much better, almost five-times disturbance rejection of the input acceleration within MBW than the PID controller “ctrl00” that has the same 3-Hz cross-over frequency. This performance comparison allows us to select controller “ctrl03” or “ctrl04” (with
= 3 and 4 Hz, respectively) as the recommended controller for nominal science mode, with its PSD of residual
reaching the position sensor noise limit (pink dashed line of
Figure 8) in the frequency band lower than 0.1 Hz. Since the input acceleration is very conservative in the simulation, controllers designed with
from 2 Hz–4 Hz are acceptable and can be loaded for in-field switching.
In an HPESA design, the acceleration signals to be measured are usually below 0.1 Hz. Therefore, for the sensor noise rejection consideration, the measurement bandwidth is preferred to be as low as possible; while on the disturbance rejection aspect, the control bandwidth should be as high as possible. In PID controllers, feedback command readout is the only measurement output; therefore, its measurement bandwidth is the same as the control bandwidth
; while in this work, in the EMC framework, controllers could directly use the estimation of acceleration from the disturbance predictor model instead of the actual measurement; this is shown as
in
Figure 3. In this way, the measurement bandwidth
can be separated from the whole control loop bandwidth
.
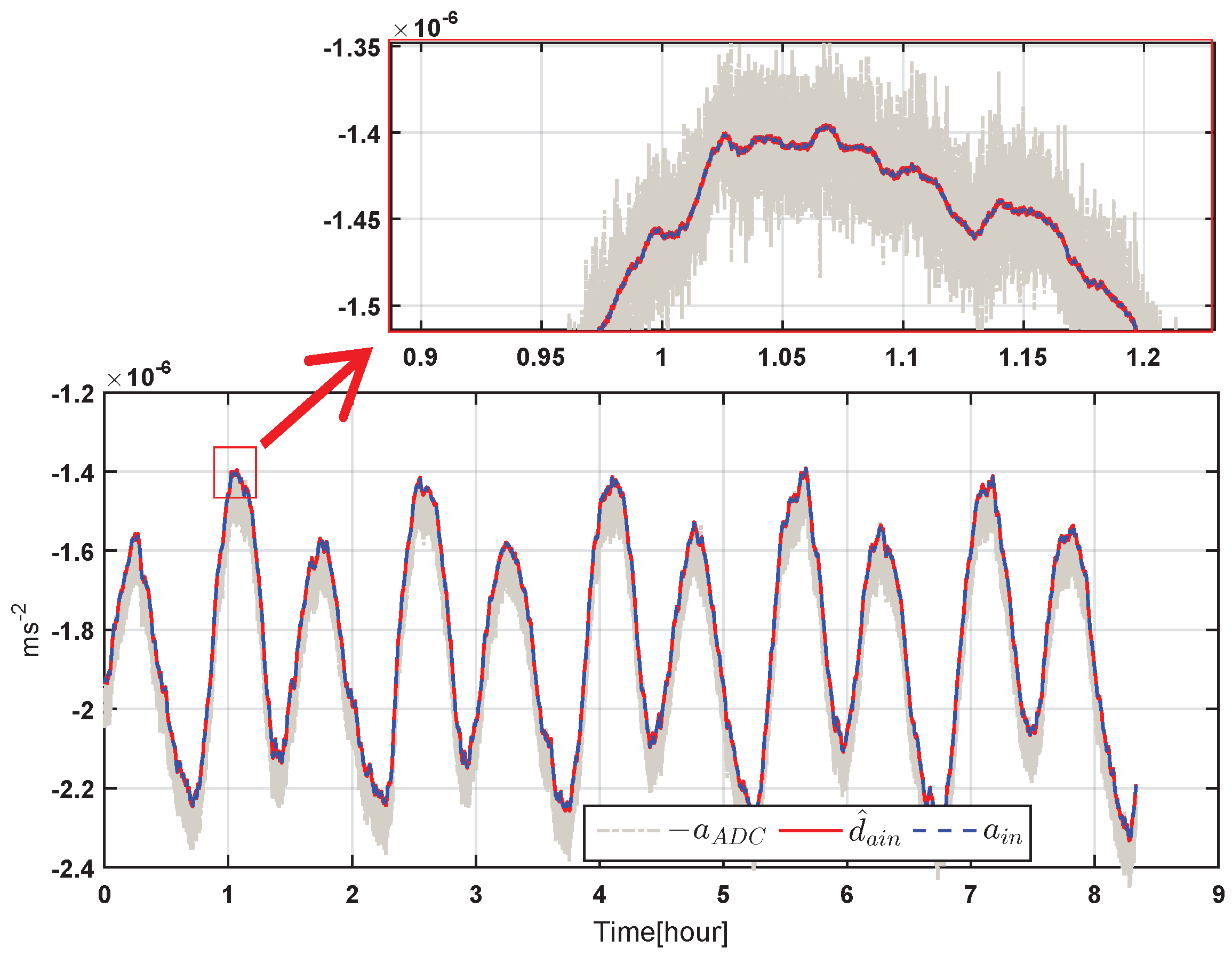
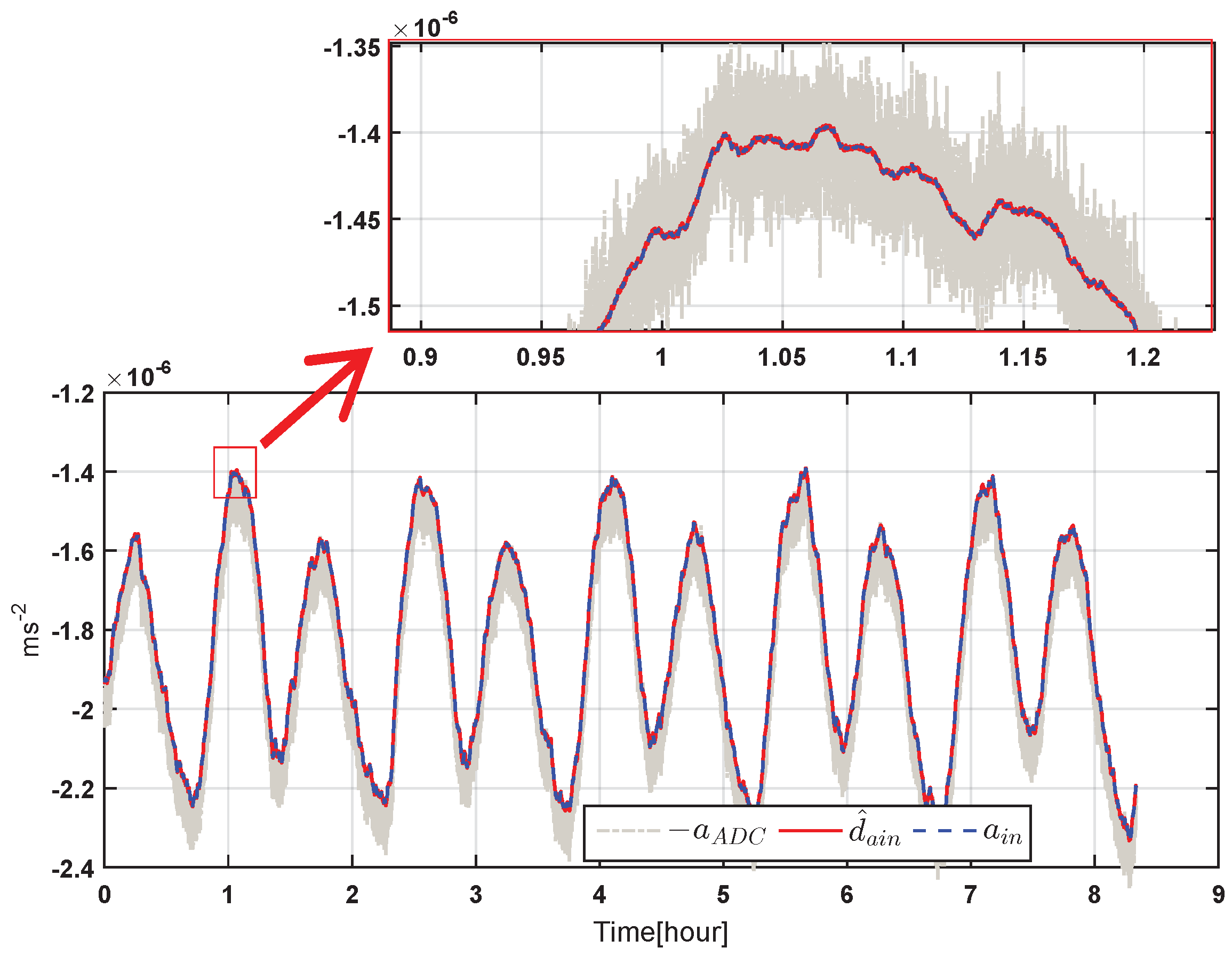
Figure 9 shows an example of the simulated acceleration outputs’ comparison at different ports of the EMC controller in the time domain, where
and
are accelerations from the feedback command (shown in
Figure 1) and from the disturbance predictor estimation, respectively. From the figure, it could be seen that the estimation of
could precisely repeat the actual measurement of the acceleration input
, meanwhile preventing the disturbance of the high-frequency sensor noises, which contrarily have been introduced by the large control bandwidth at the output port of the feedback command
that are plotted in the grey dashed-dotted line of
Figure 9 for comparison. It should be pointed out that the noises in
mainly come from the detection noises of capacitive position sensing, and the controller itself does not produce additional noises. These results show a good solution of the contradiction between enough measurement noise rejection and high control bandwidth by the EMC algorithms. This is one of the most significant advantages of EMC and is applicable to the inertial sensor-type accelerometers for the TianQin mission or other space missions that have even much lower measurement bands.
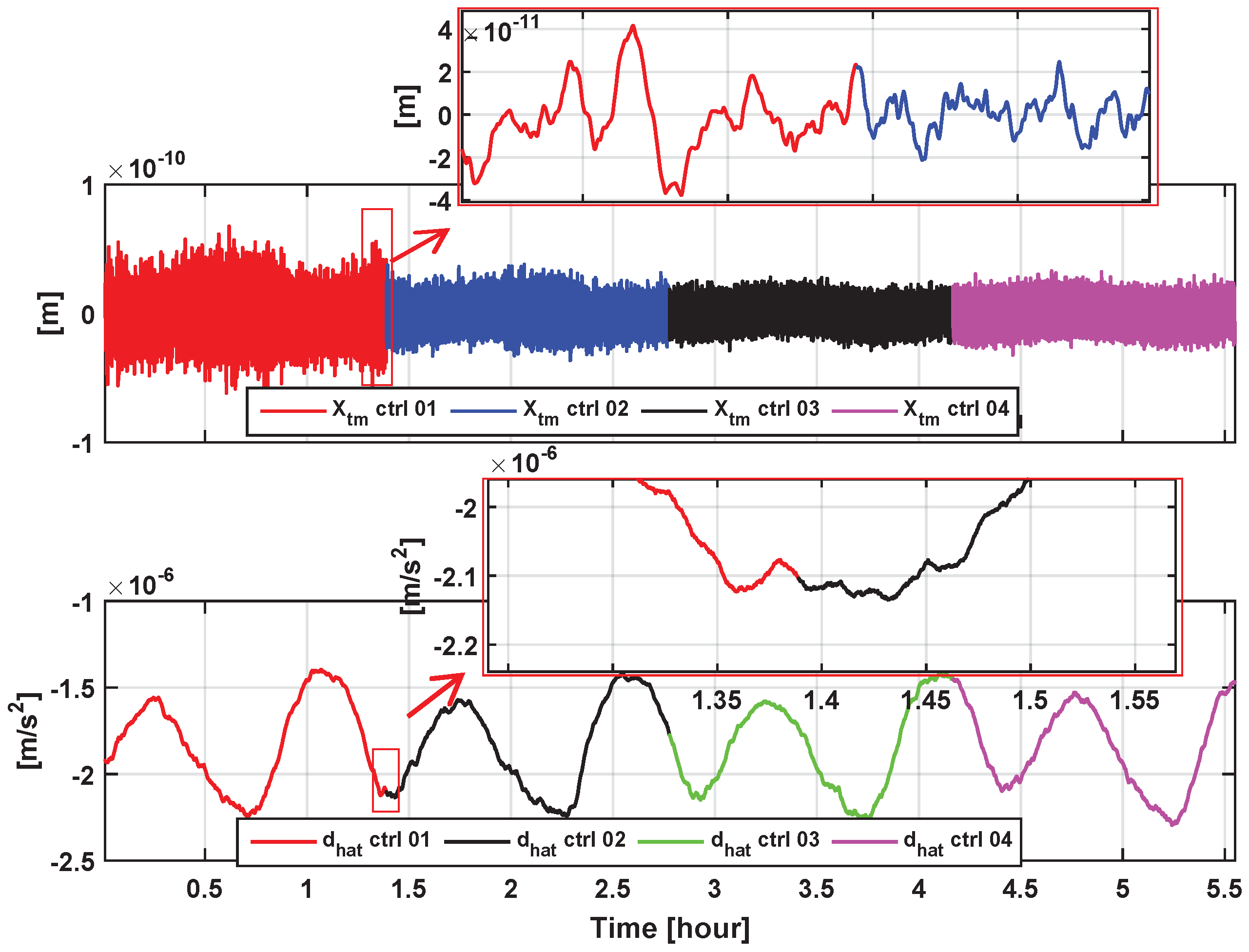
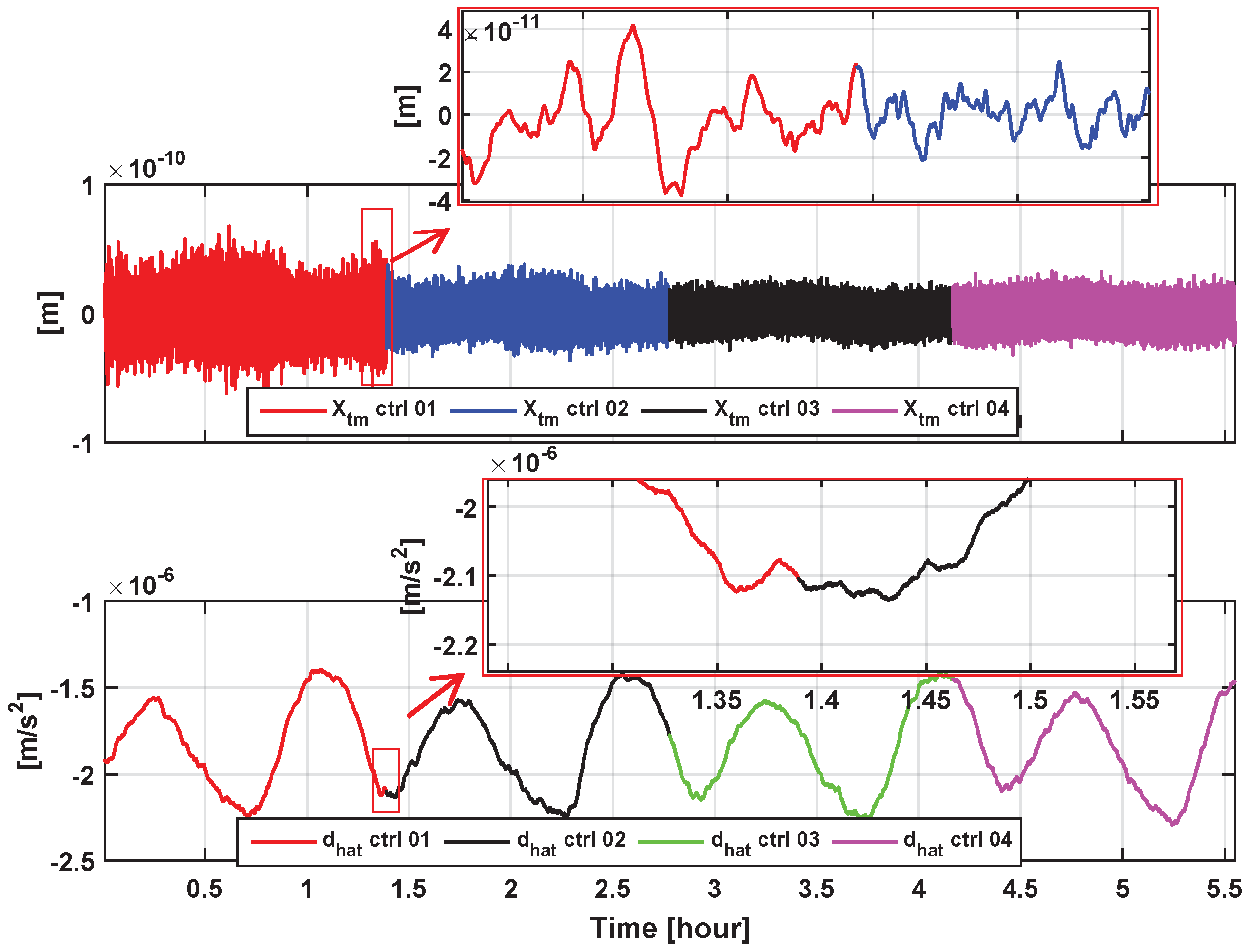
In a further simulation, the four EMC controllers “ctrl01”–“ctrl04” are sequentially switched on and loaded for about 1.5 h each.
Figure 10 shows the simulation results of the residual TM positions and accelerations under smooth switches between the four control modes in the time domain. Smooth and seamless transitions of TM control can be observed during all of the switching instants, as shown in the TM accelerations, as well as the inset of the zoom-in positions of
Figure 10. This may benefit more effective transitions between different working modes during in-orbit operations, e.g., the initial calibration mode and the scientific measurement mode, etc. The control mode switching could be implemented by using a remote-commanded multichannel switch for the preloaded parameters that are chosen. The implementation in the detailed FPGA controller codes will not be included here.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}