
Continuous Space Estimation: Increasing WiFi-Based Indoor Localization Resolution without Increasing the Site-Survey Effort †




Abstract
:1. Introduction
2. Related Work
- Deterministic:
- -
- Propagation model based: Localization is carried out estimating the distance to nearby APs by means of a WiFi signal propagation model [27,28,29,30,31,32]. Propagation models describe how the signal is propagated in the environment, and they are used to translate the RSS into a distance. The APs’ location in the environment is normally known a priori. Using the distance to the APs and their positions in the environment, the typical choice is to use lateration algorithms to perform the localization.
- -
- Fingerprint based: These systems use a fingerprint database stored in a training stage to obtain the estimated position of the device by means of different classification algorithms [14,15,16,33]. The fingerprint database stores information, typically the RSS, at certain locations of the environment, modeling the characteristics of the signal using either discrete (fingerprints) or continuous (surfaces) representations.
3. Continuous Space Estimator
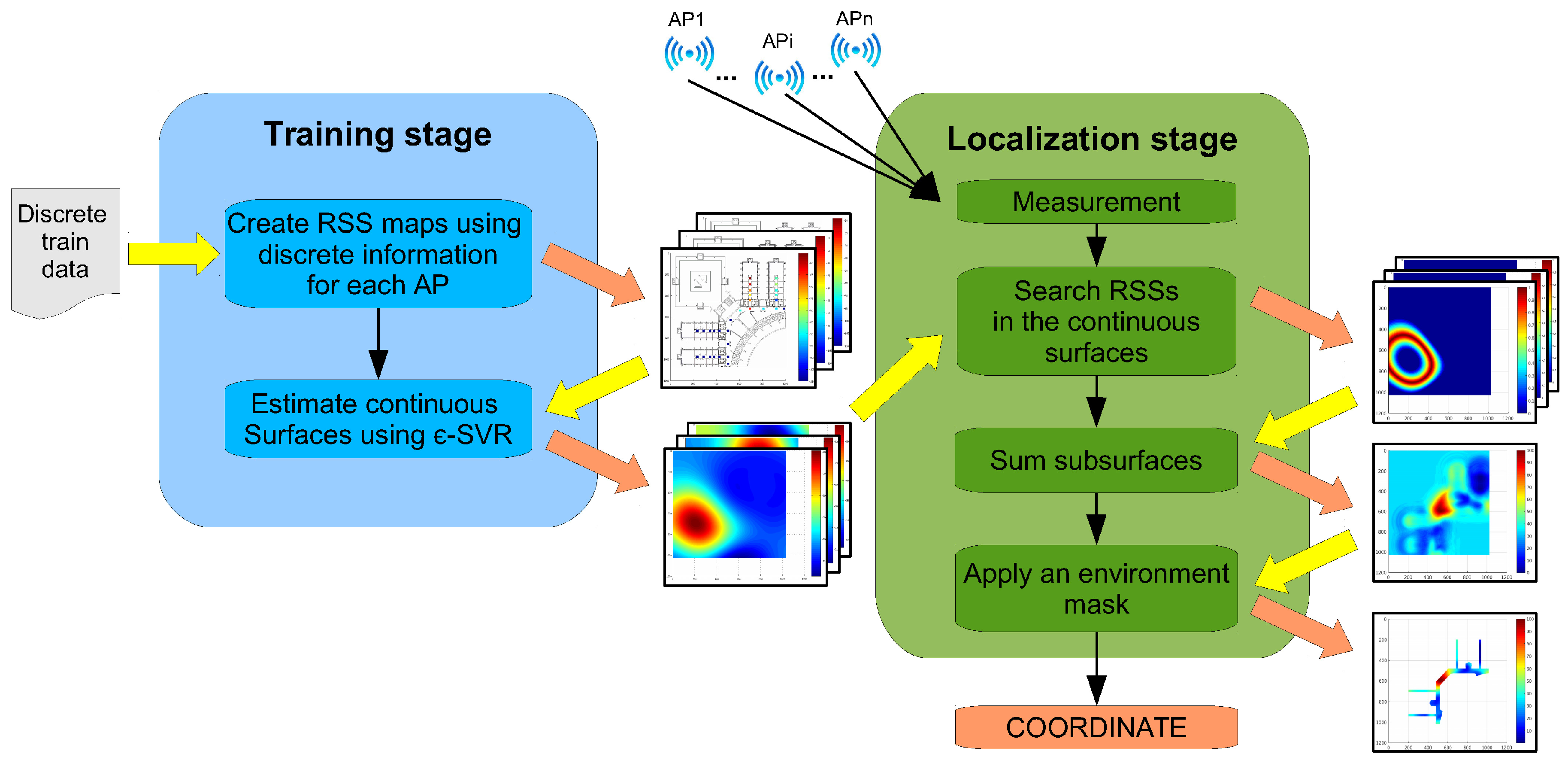
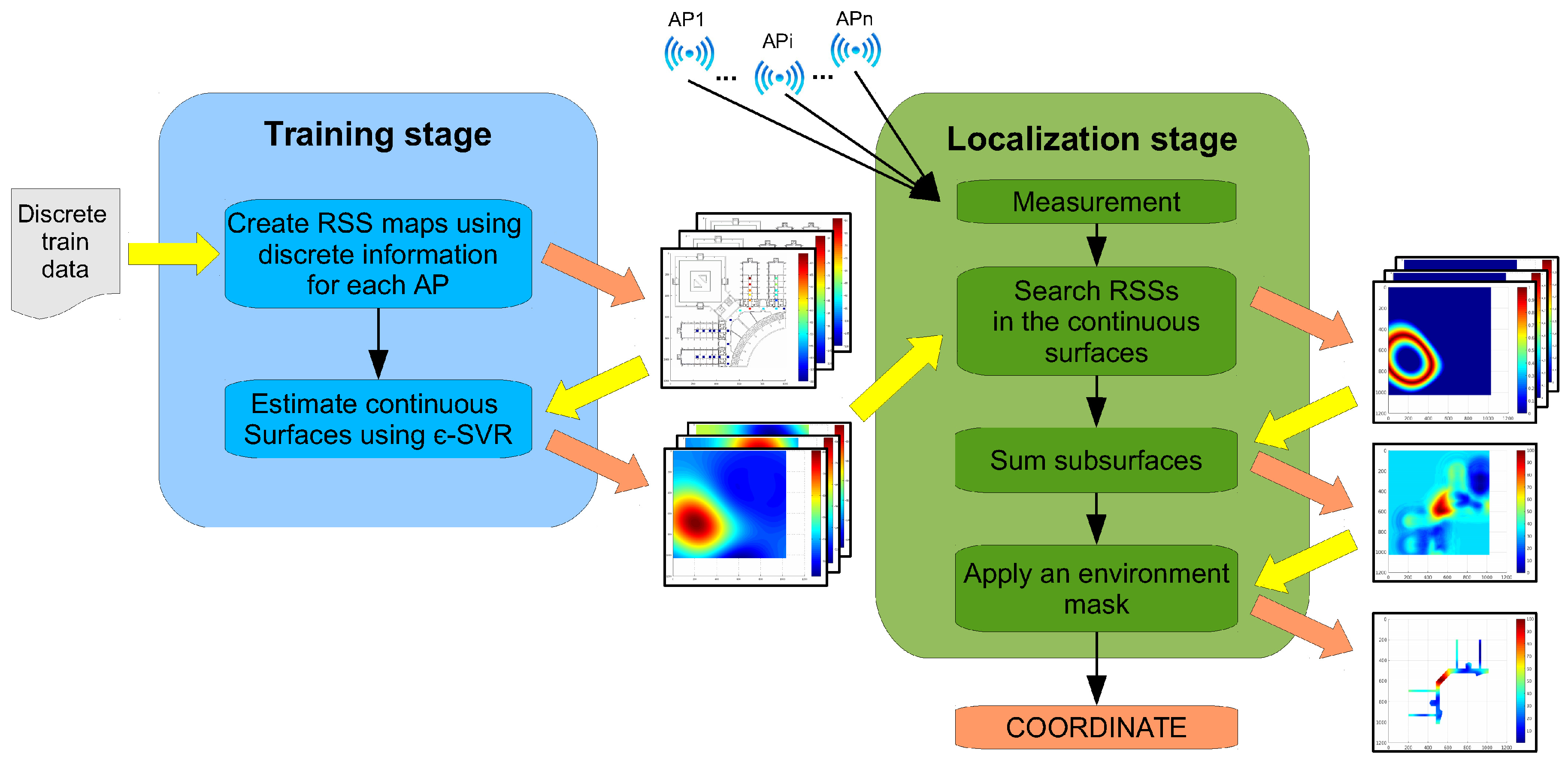
3.1. Training Stage
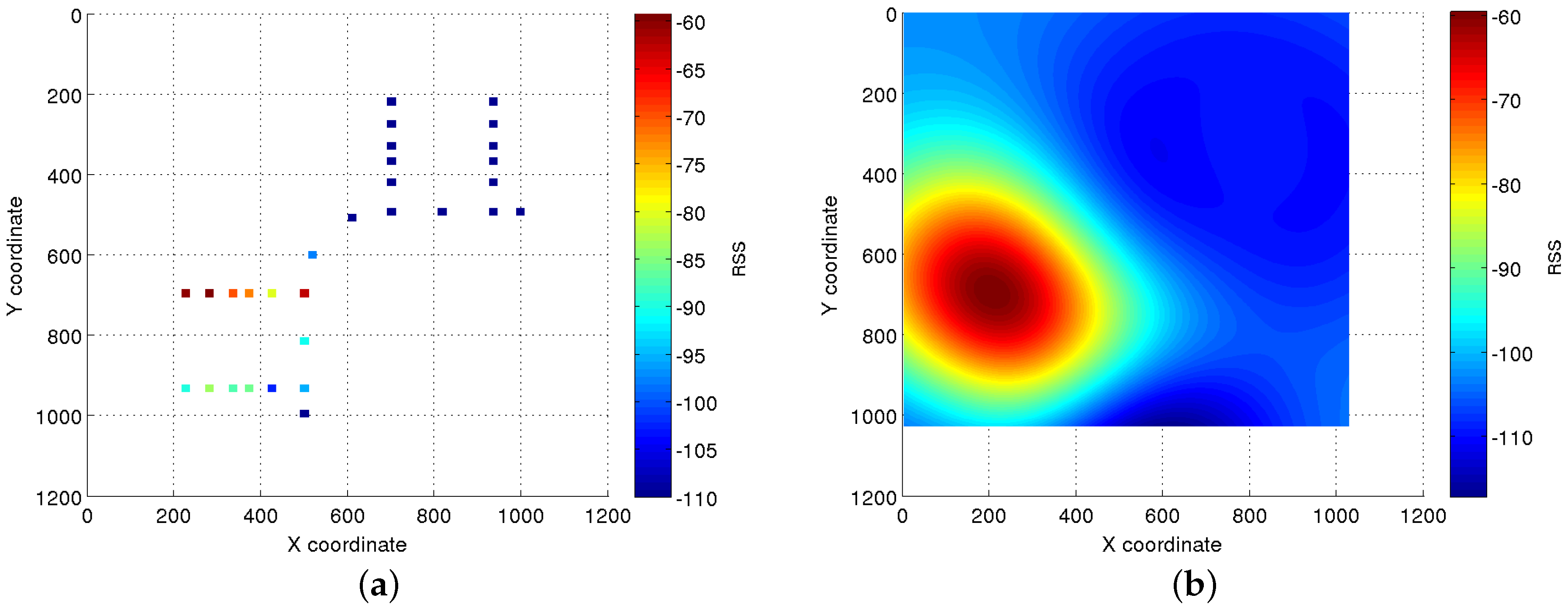
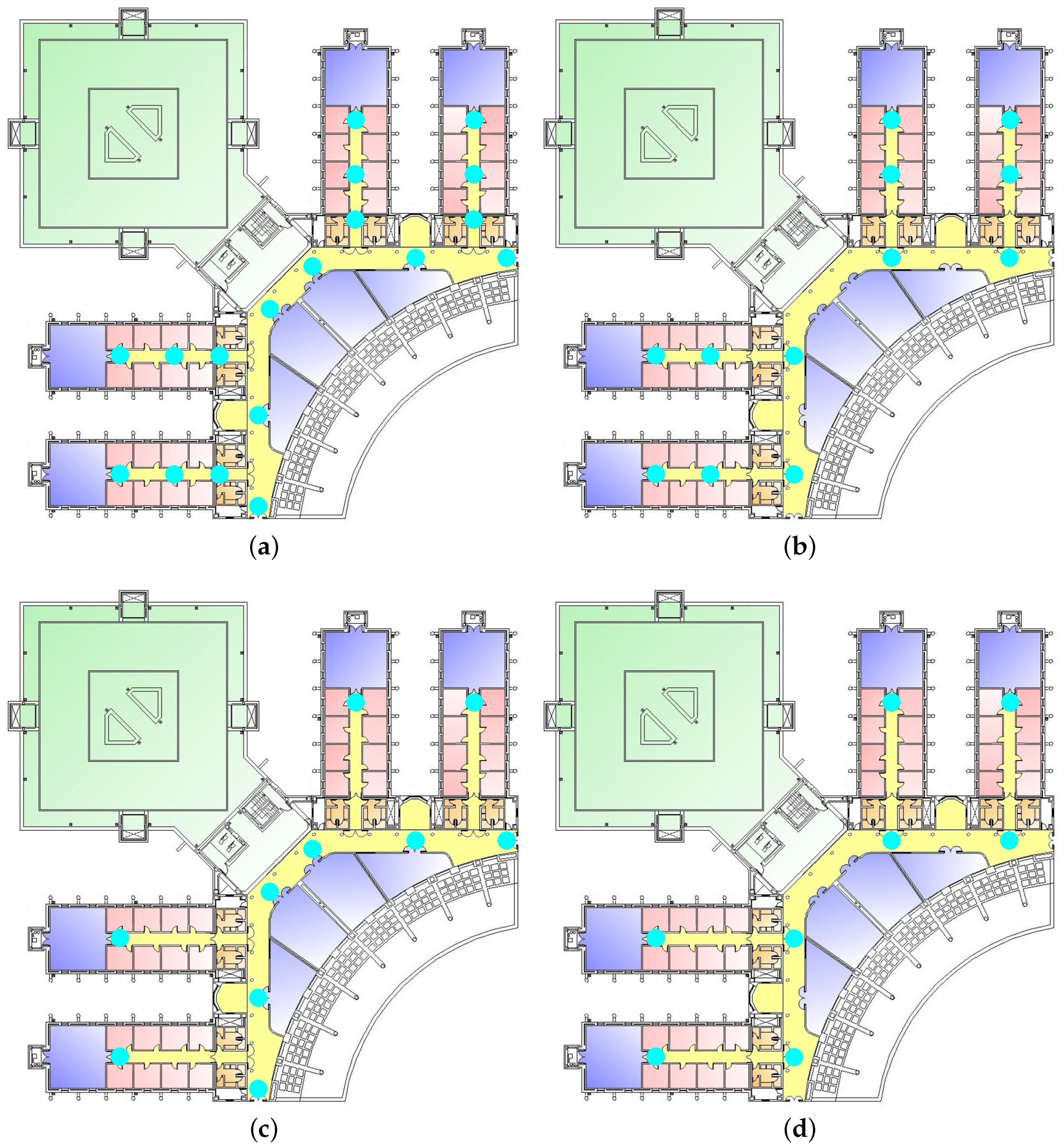
- Creation of an RSS map for each AP using discrete information:First, the environment is site-surveyed as in the usual fingerprint-based method: RSS is measured at some positions of the environment and stored in the fingerprint database FP (Equation (1)).where is the RSS from at Position 1, n is the number of APs and p is the number of site-surveyed positions.Then, n matrices (one per AP) are created using the information contained in the fingerprint database (Equation (2)).where is the RSS from at coordinate if the coordinate was site-surveyed and unknown otherwise. In the case the coordinate was site-surveyed, but no signal was received from , the value is set to a minimum value (−110 dBm in our experimentation). This way, the important information obtained when an AP is not detected at a certain coordinate can be used to correctly estimate the RSS at non-site-surveyed coordinates. is the number of coordinates represented in the x axis, and is the number of coordinates represented in the y axis. The number of coordinates and will be selected depending on the chosen resolution for the localization system. An analysis of the effect of changing the system resolution will be exposed in Section 4.3.3.An example of this matrix is represented in Figure 2a, where the colored dots represent the RSS at the site-surveyed coordinates, and the white background covers the coordinates with unknown RSS.
- Estimation of the continuous reference surfaces:The continuous reference surfaces are created using the information contained in the discrete matrices defined in the previous step. To do so, an ϵ-SVR algorithm [46] is used to infer the RSS values for the coordinates with unknown values.This process is performed in a two-step approach:First, ϵ-SVR is used to create a function (Equation (3)) for each , that is able to estimate the target outputs for the input training data with at most ϵ deviation.For a given training dataset for each AP, the function for linear SVR is defined as:where b is the “bias” term, ω is the normal vector to the SVR hyperplane (optimized by Equation (5)), is a feature vector (the coordinate of position ) and is the target output (the RSS from at position ) .Then, the RSS expected to be measured in the coordinates with unknown values are estimated using this function. The resulting continuous surfaces can be seen as maps of estimated coverage for each AP.Under the selection of the parameters and (C is the regularization parameter, determining the trade-off between training error and model complexity), the function is obtained by:dealing with the so-called ϵ-insensitive loss function described by:This optimization problem is computationally simpler to solve when transformed into its Lagrange dual formulation (called the dual problem). The dual formula is obtained introducing the and multipliers by:The ω parameter can be described as a linear combination of the training observations using the equation:The function for the dual problem is therefore:The bias term can be computed by using the Karush–Kuhn–Tucker (KKT) [47,48] conditions. These conditions state that the product between dual variables and constraints has to disappear at the optimal solution, obtaining the following conditions:According to these conditions, b can be computed as follows:Finally, the dual formula is extended to support nonlinear functions by replacing the dot product with a nonlinear kernel function , where is used to transform to a high-dimensional space. This way, the original problem comes to:and the function for the nonlinear SVR used to estimate the output values is as follows:In this work, we have used the Radial Basis Function kernel (RBF kernel), which is defined as:where is the squared Euclidean distance between the two feature vectors and σ is a configuration parameter.
3.2. Localization Stage
- Measurement of the RSS:An RSS sample is collected from every AP using the WiFi device to be located.
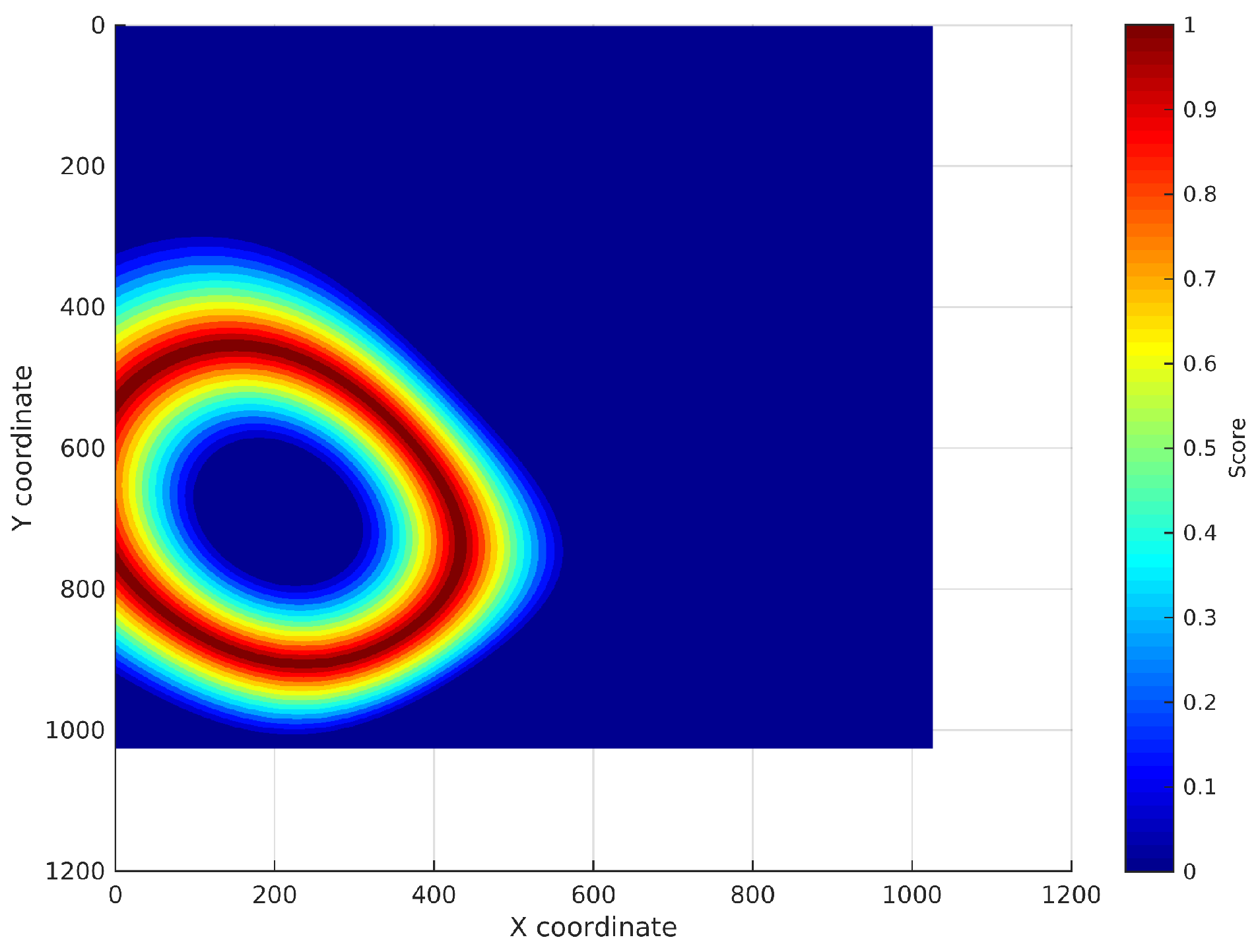
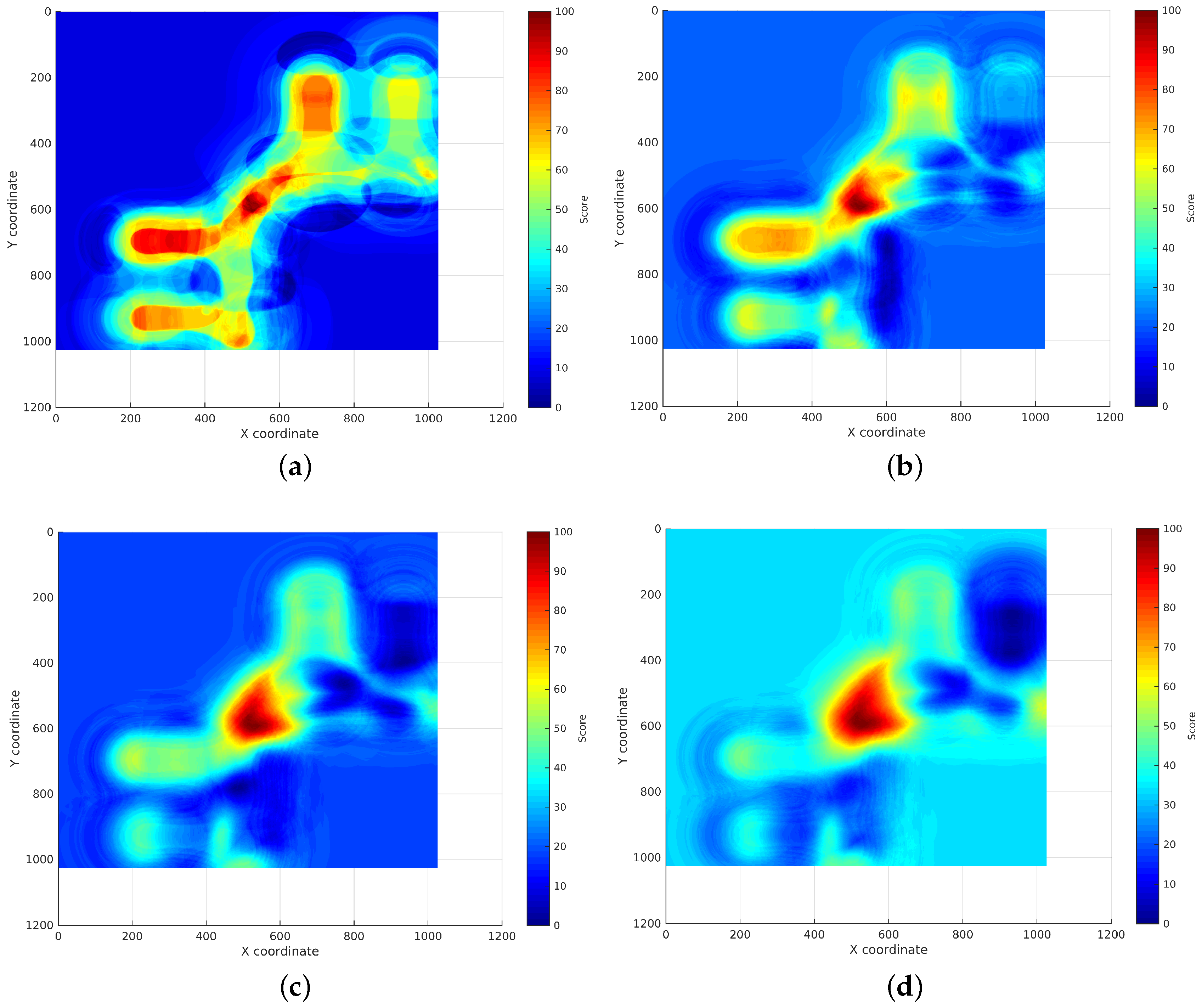
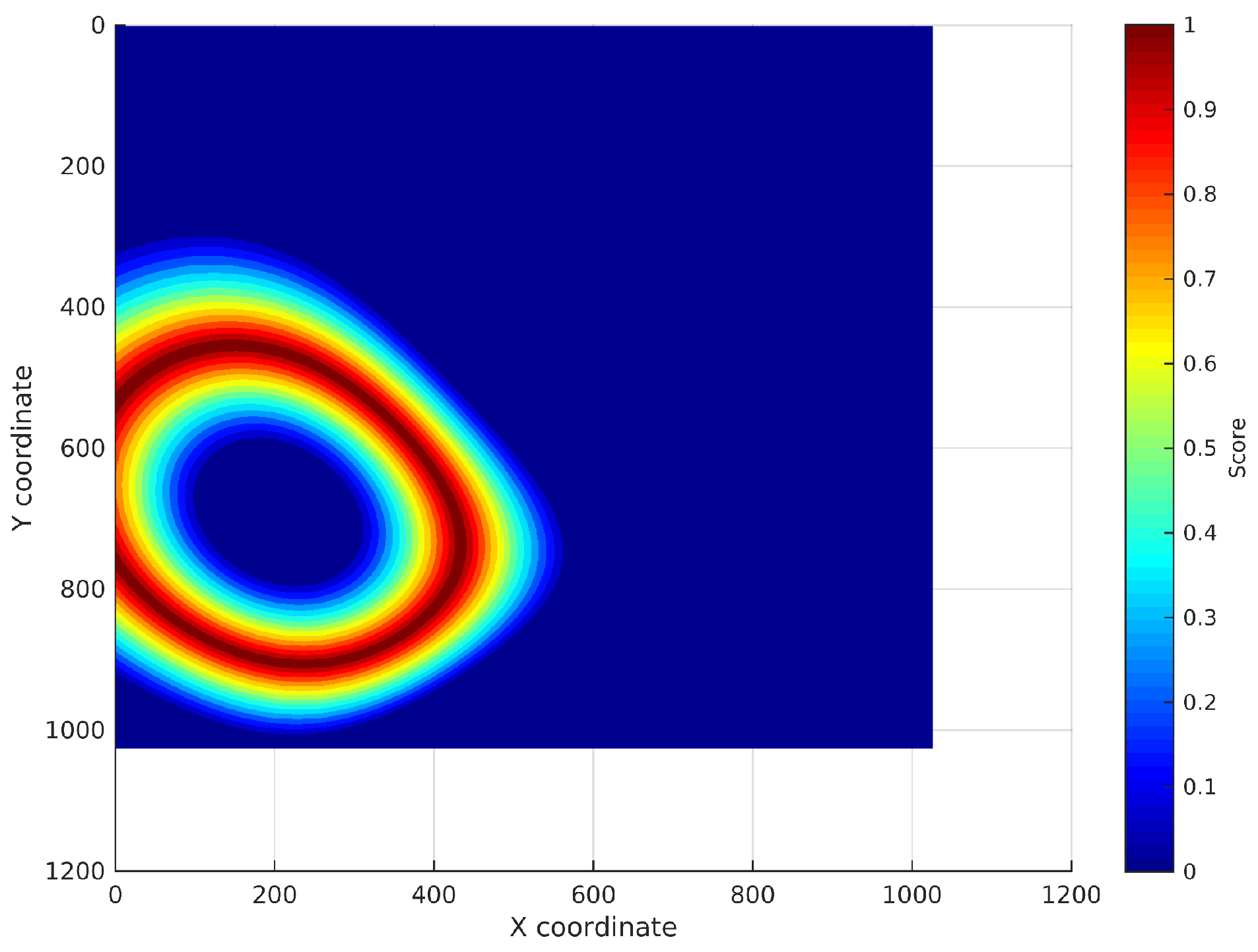
- Search for the RSSs in the continuous surfaces:The RSS from each AP is searched in the reference surface corresponding to that AP. This search is performed adding a noise margin to the RSS to deal with the noise characteristic of WiFi technology. An analysis of how this margin has been selected will be exposed in Section 4.3.1. The coordinates where the RSS is exactly the same as the RSS sample will obtain the maximum score, then the score will decrease as the RSS differs from the RSS sample until the difference between both values is higher than the margin. The rest of coordinates will get no score. This way, a new localization subsurface for each AP is created containing the scores for the coordinates that can be the location of the device (represented from light blue to red depending on their score in Figure 3). Figure 3 shows the subsurface obtained for the estimated reference surface shown in Figure 2b and an RSS of −97 dBm.
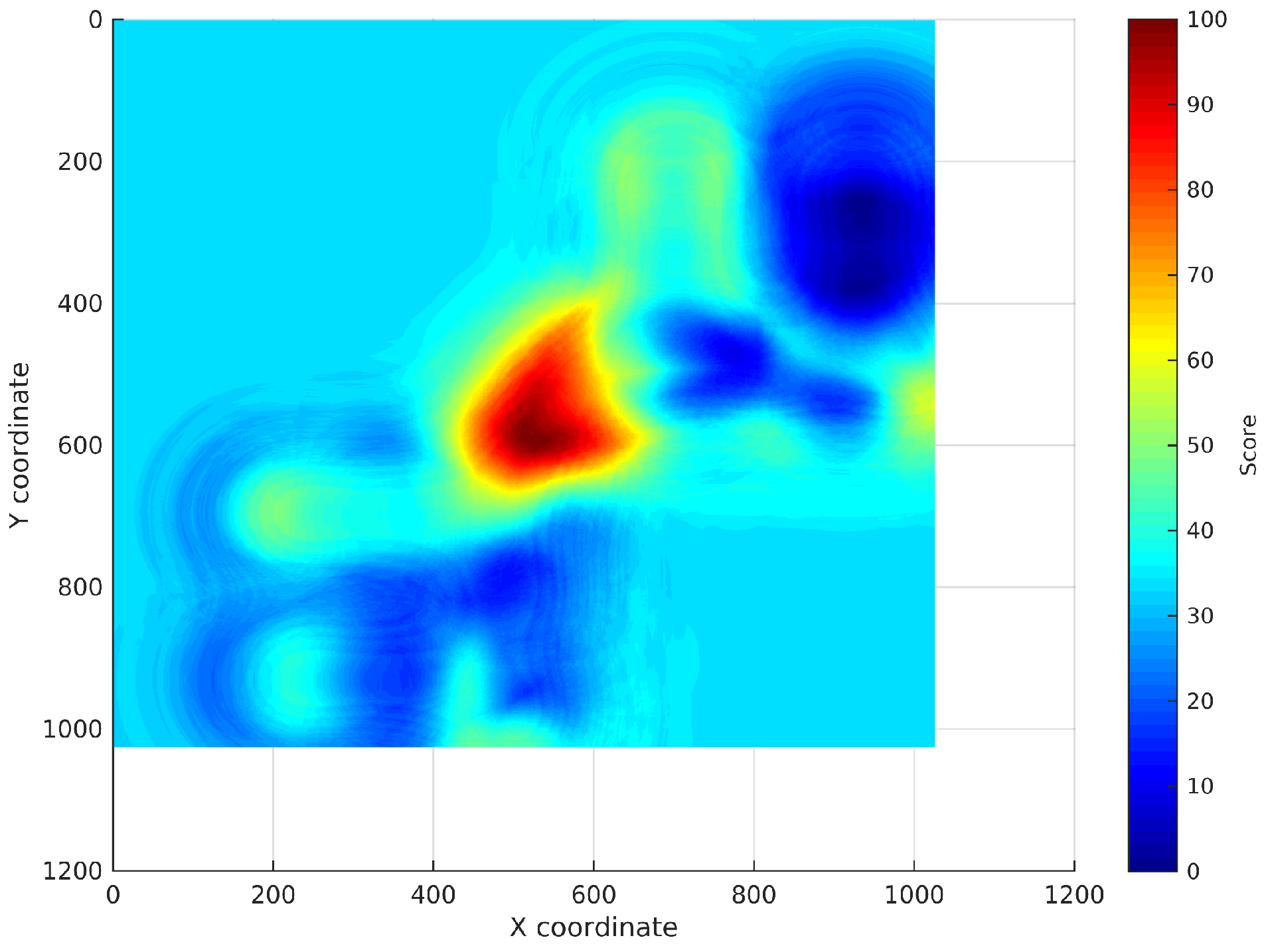
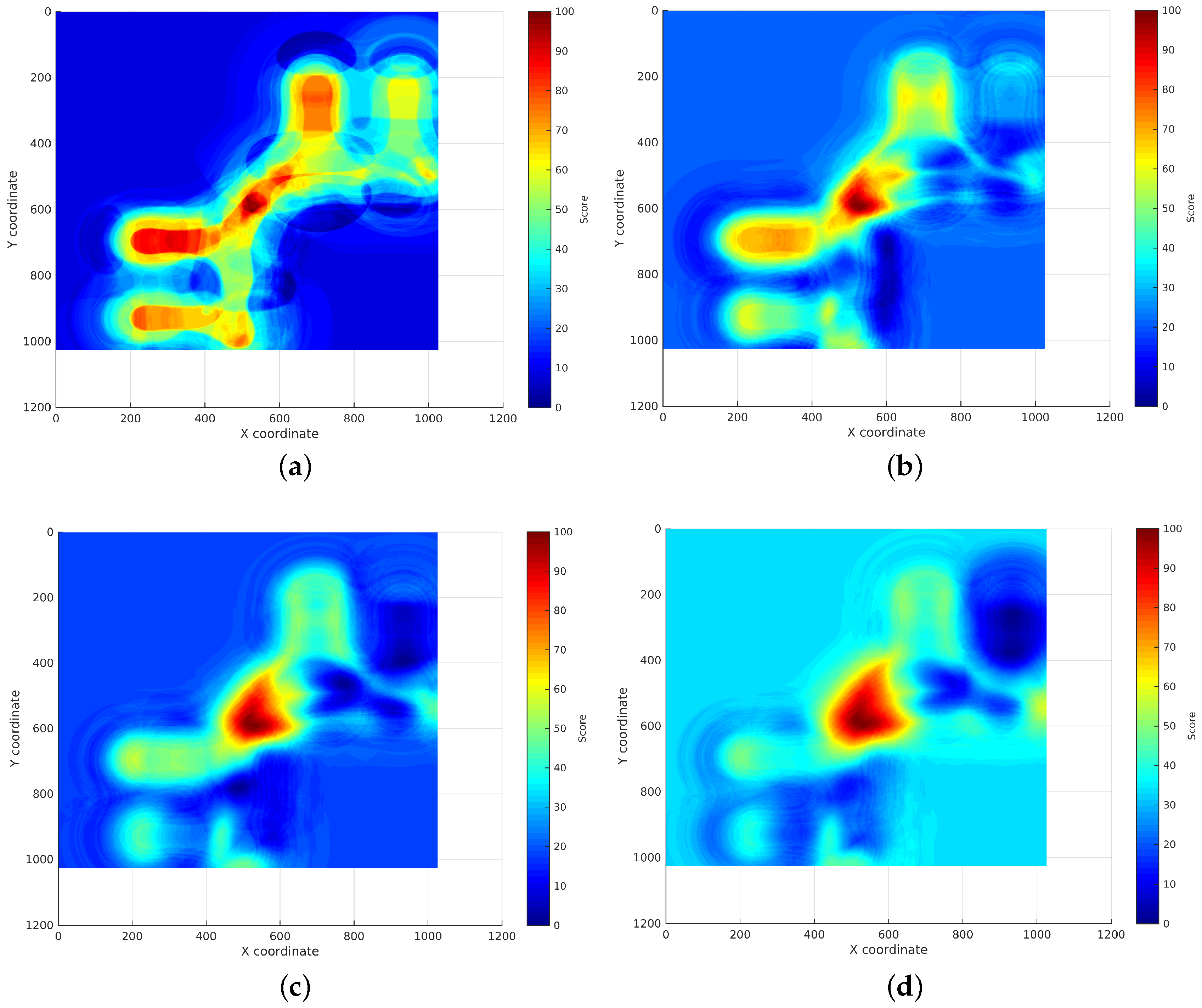
- Addition of the localization subsurfaces:The localization subsurfaces generated for each AP are now summed to obtain a new surface with higher values in the coordinates with higher probabilities of being the location of the device. An example of the results surface can be seen in Figure 4. In this surface, the red coordinates are more likely to be the location of the device.
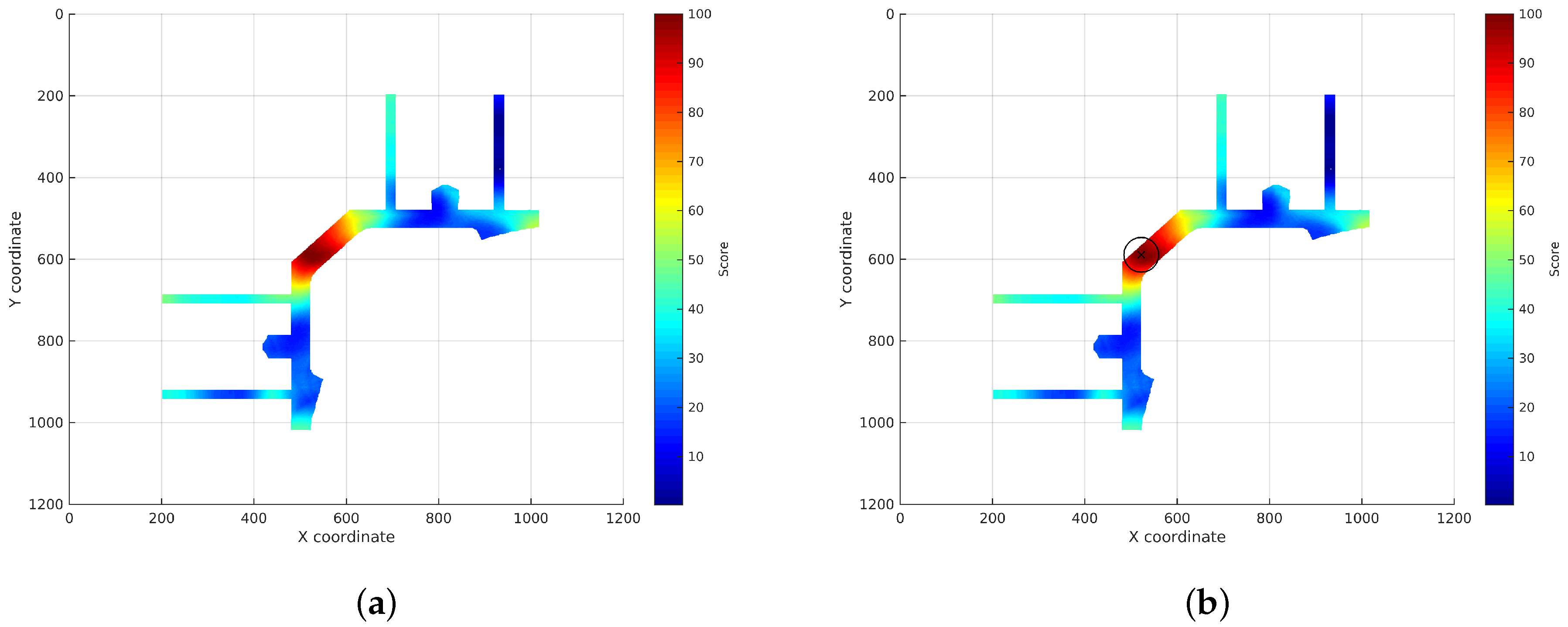
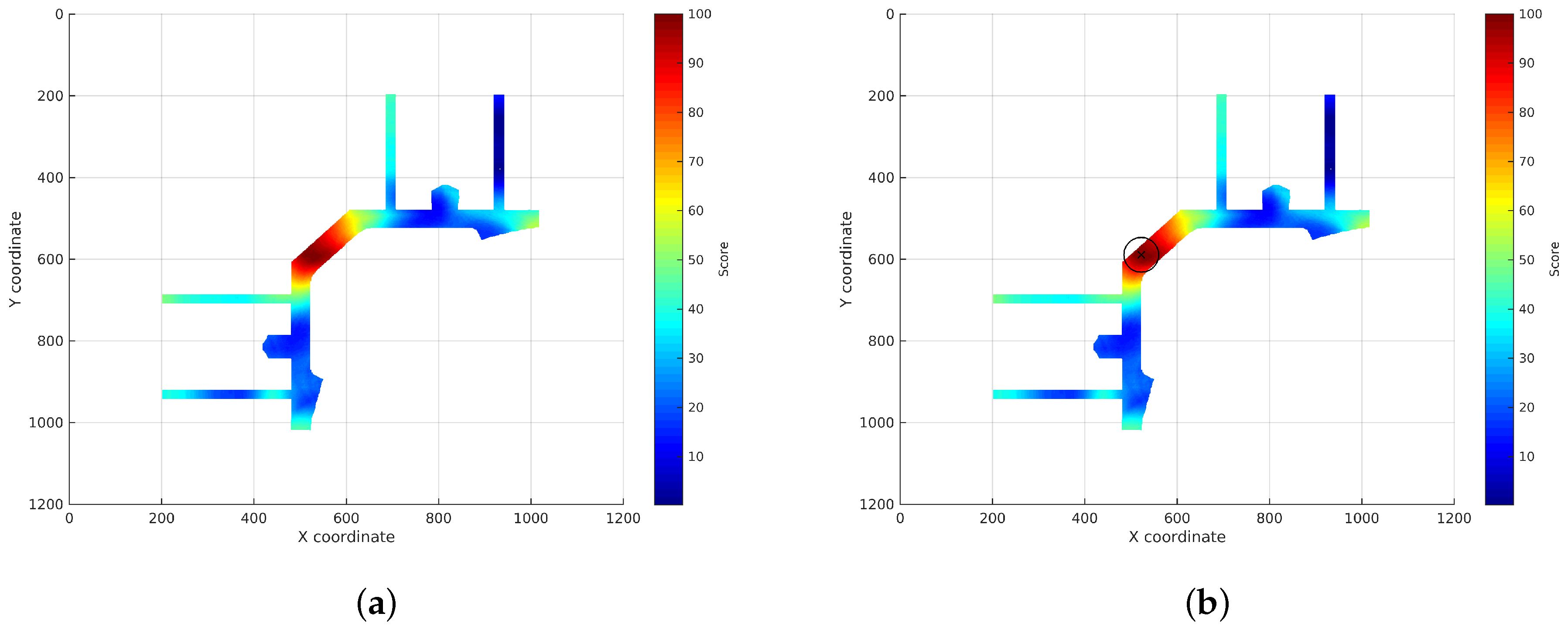
- Application of an environment mask:The surface generated in the previous step can contain inaccessible areas outside the building. In addition, in certain applications, only certain areas of the environment are reachable for users. For instance, a museum visitor cannot access the storage rooms. To remove these unreachable areas, a mask is applied to the surface obtaining a new surface where only the reachable coordinates have a score (Figure 5a).
- Estimation of the device location:Finally, the location of the device will be estimated as the coordinate with the highest score in the resulting masked surface (Figure 5b).
4. Experimental Analysis
4.1. Experimental Setup
4.2. Experimental Results
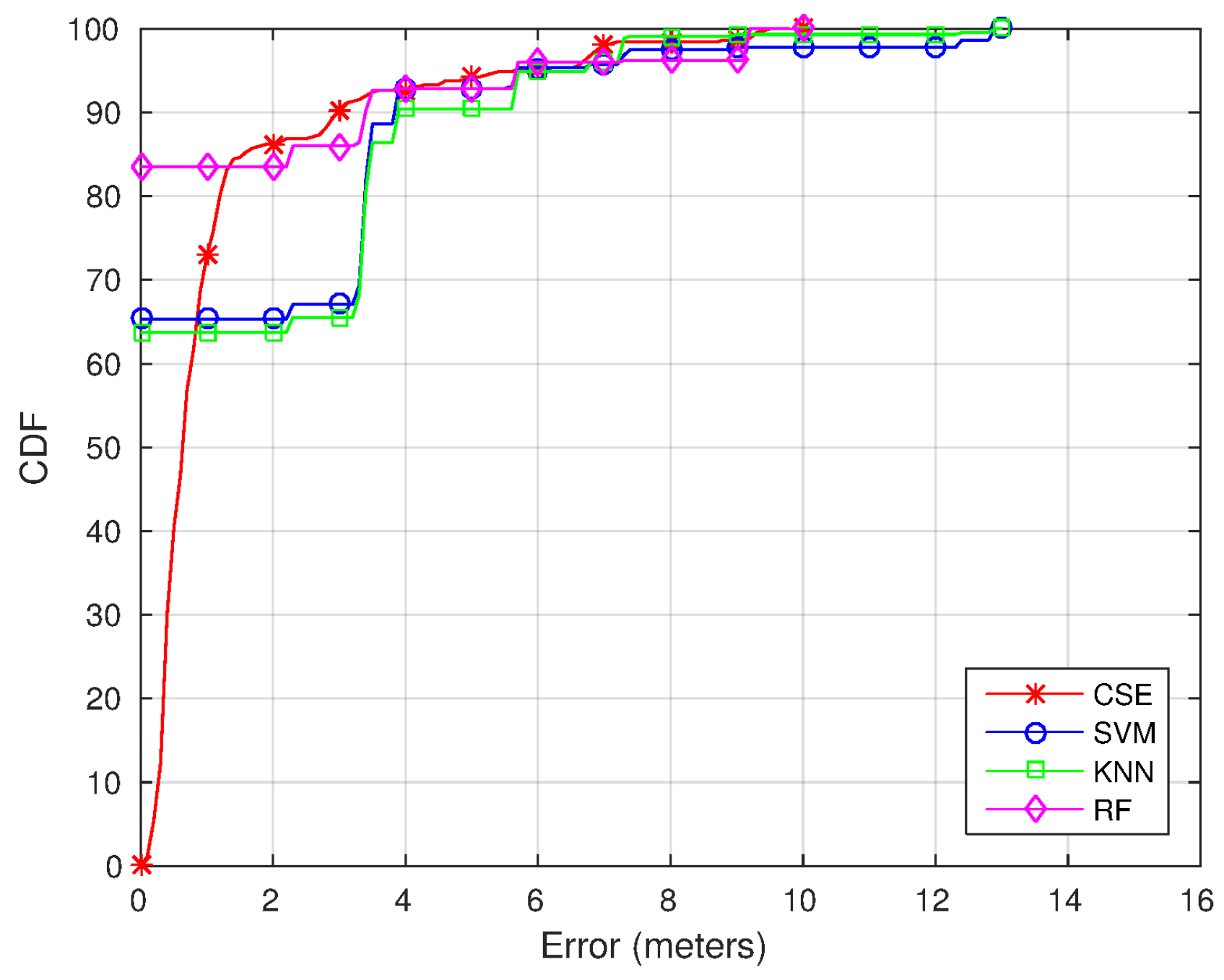
4.2.1. Topological Positions
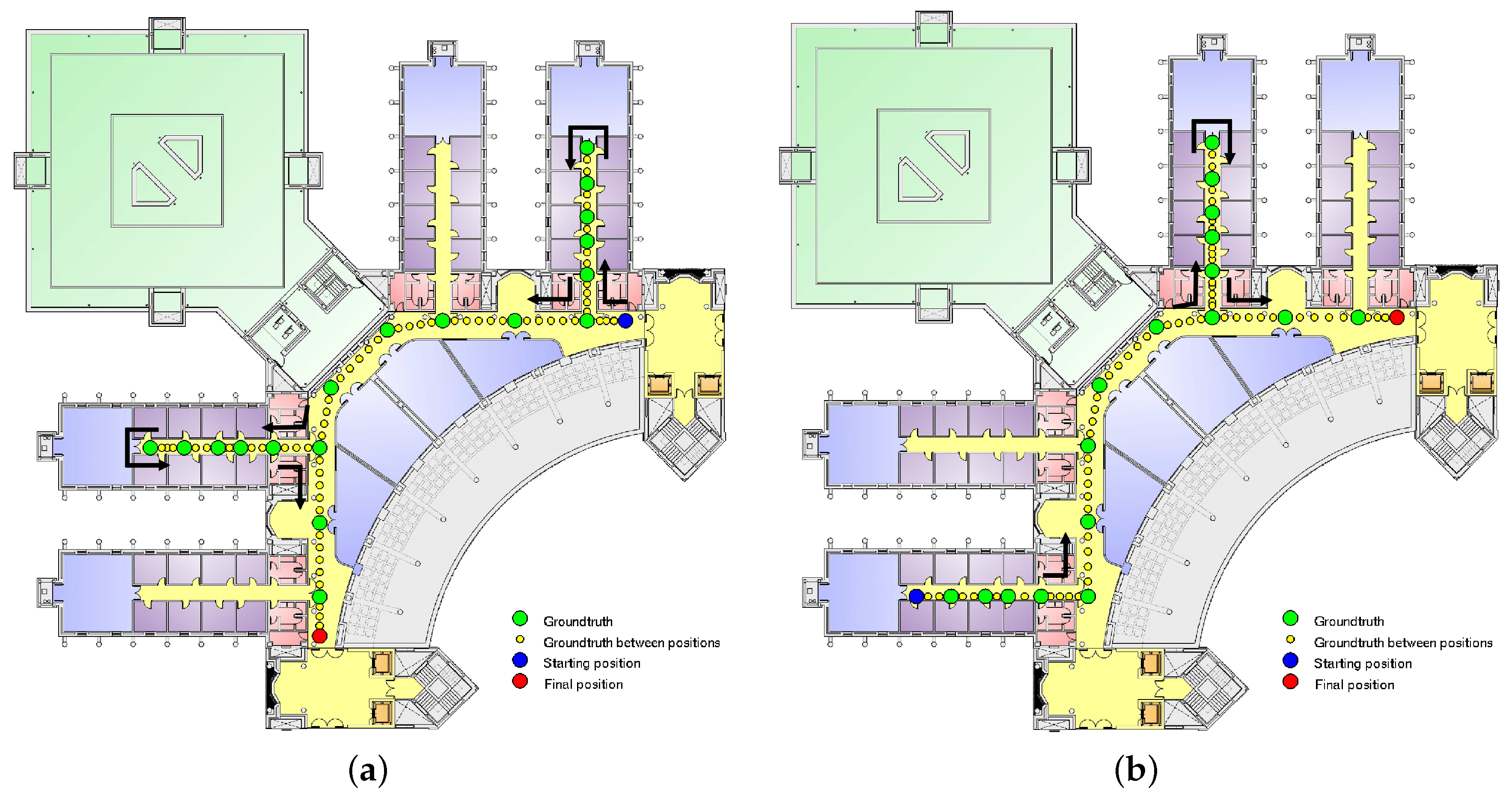
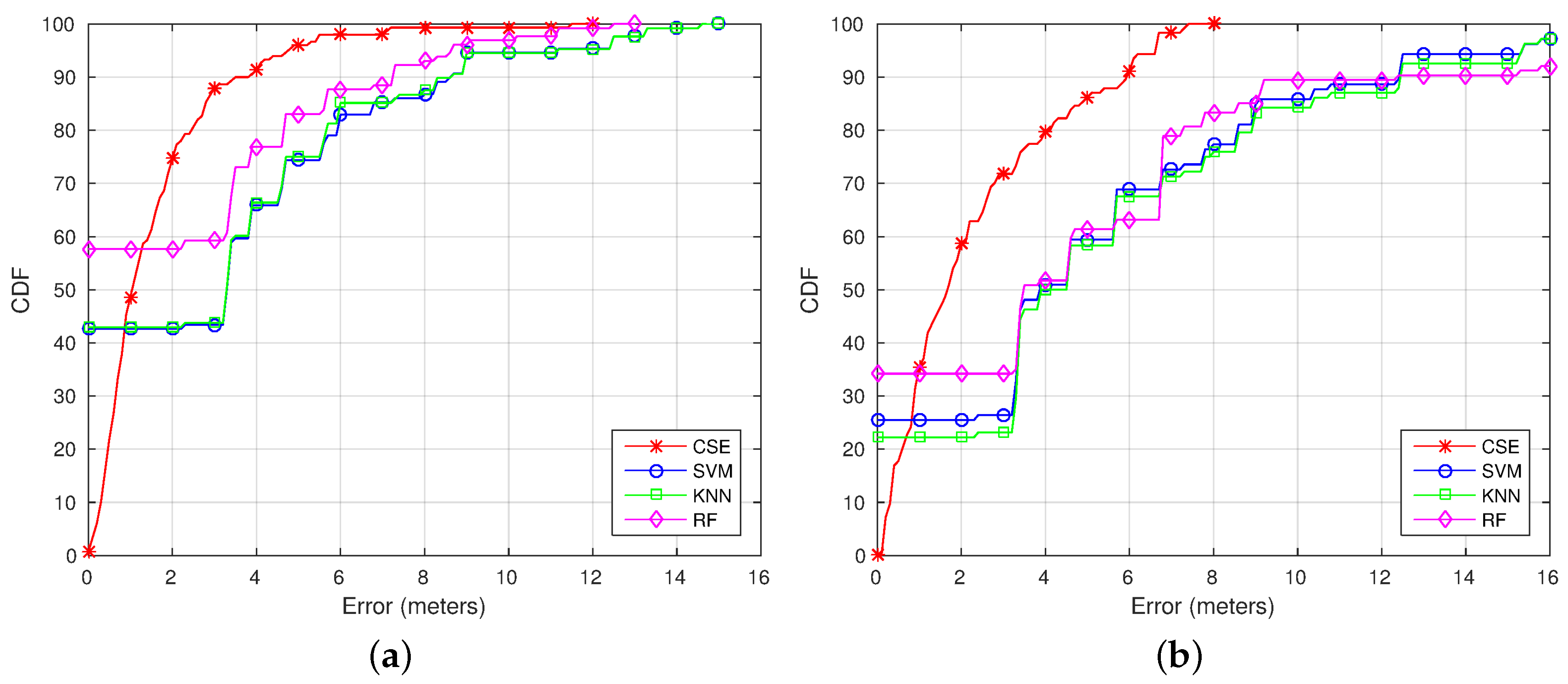
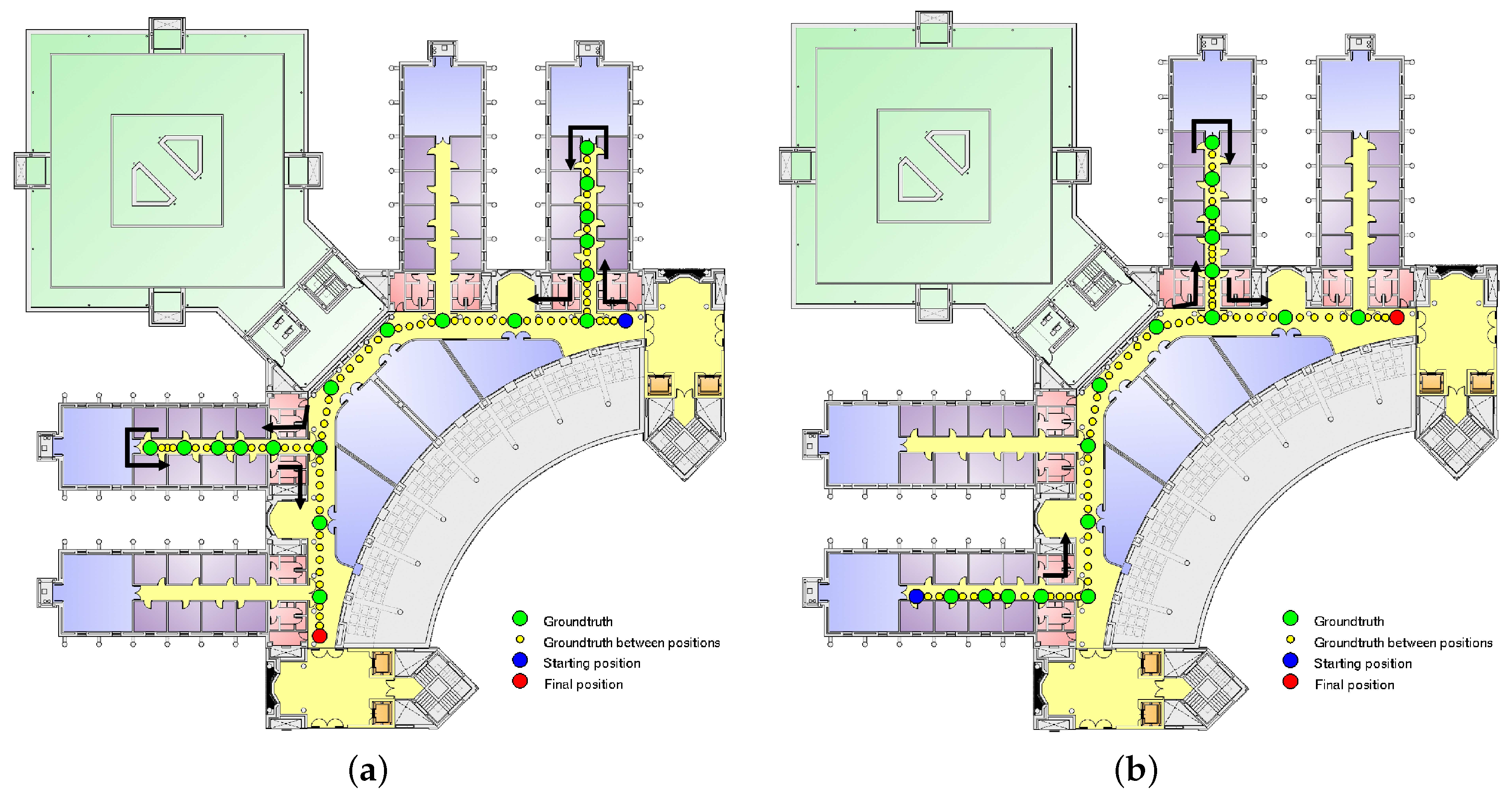
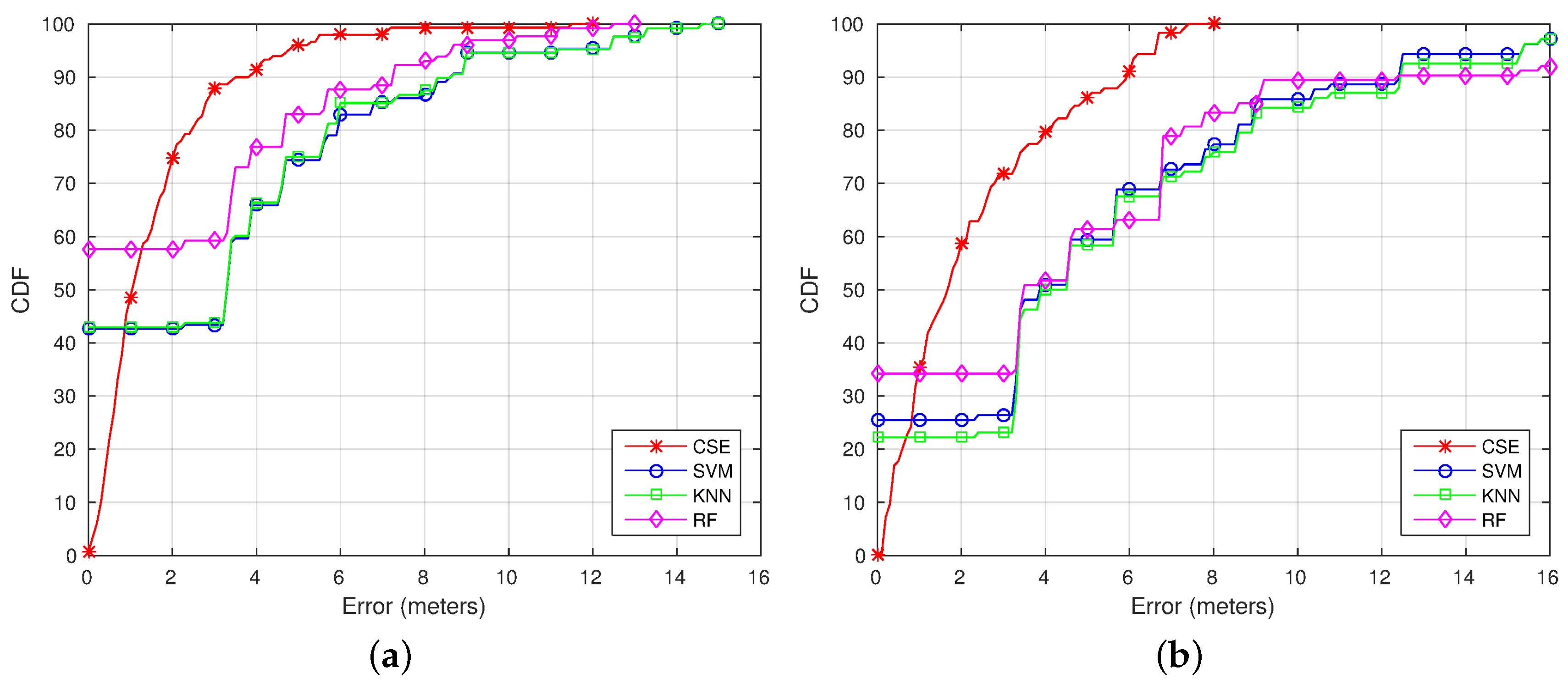
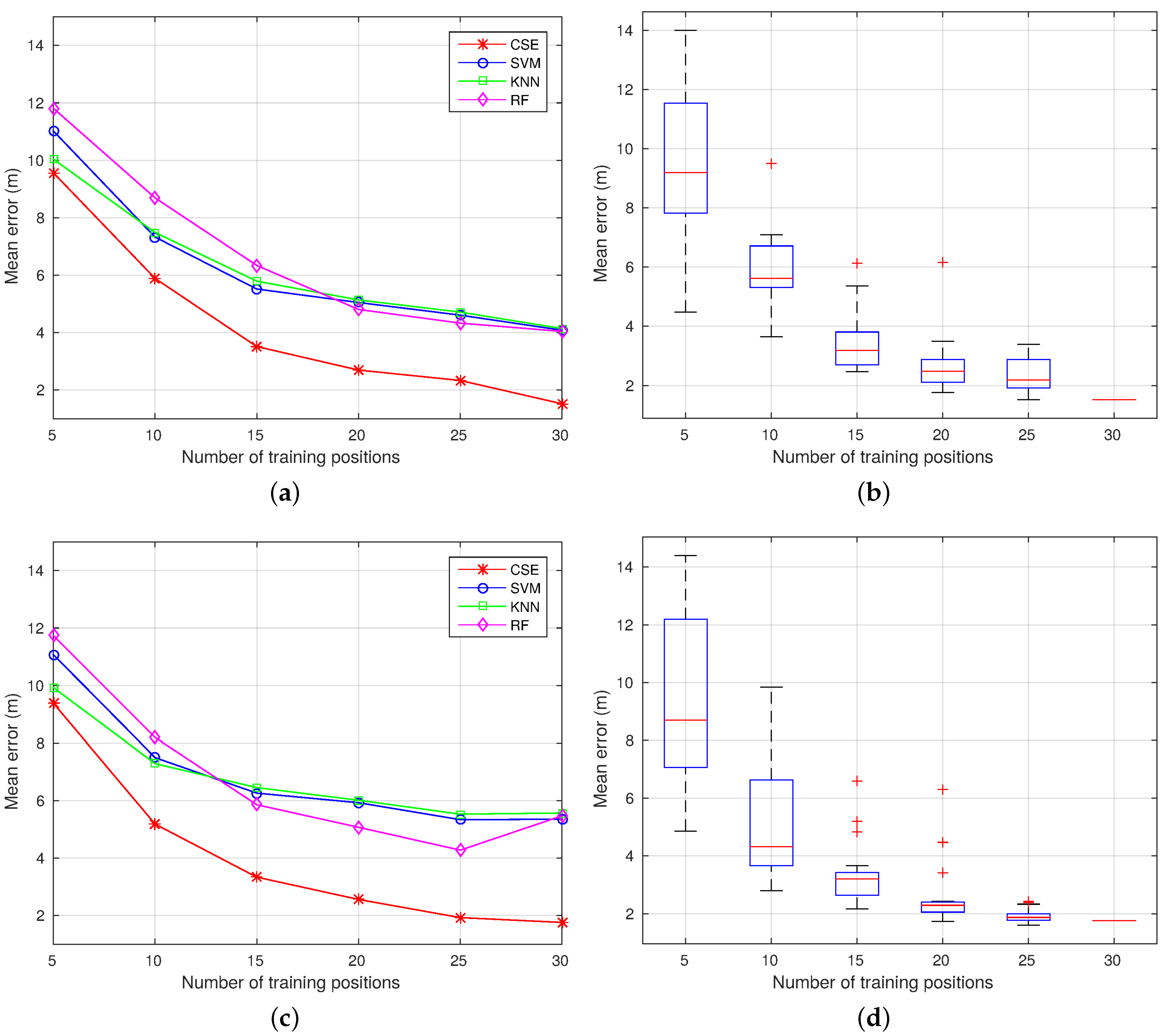
4.2.2. Trajectories
4.3. Parameters and Resolution Evaluation
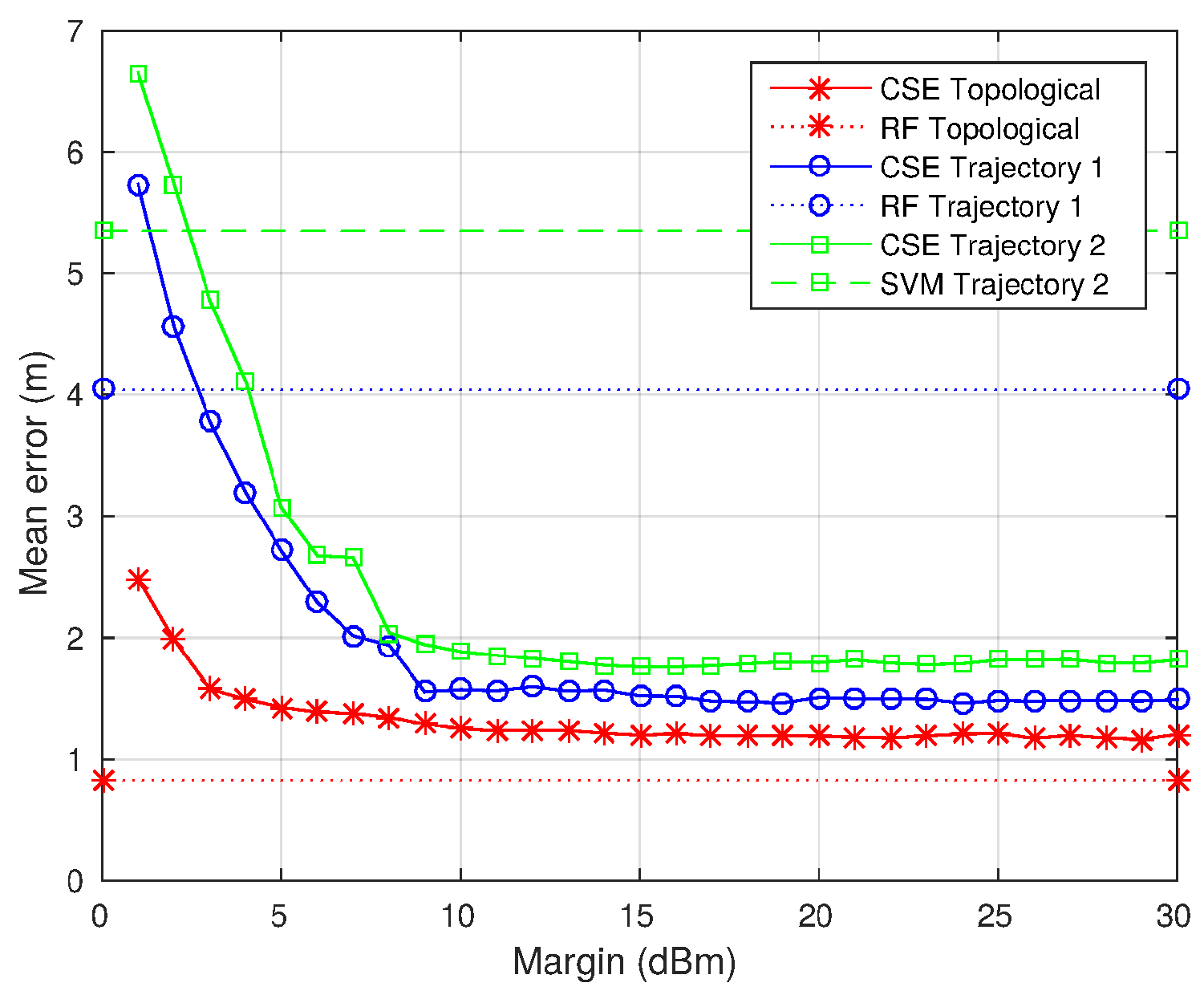
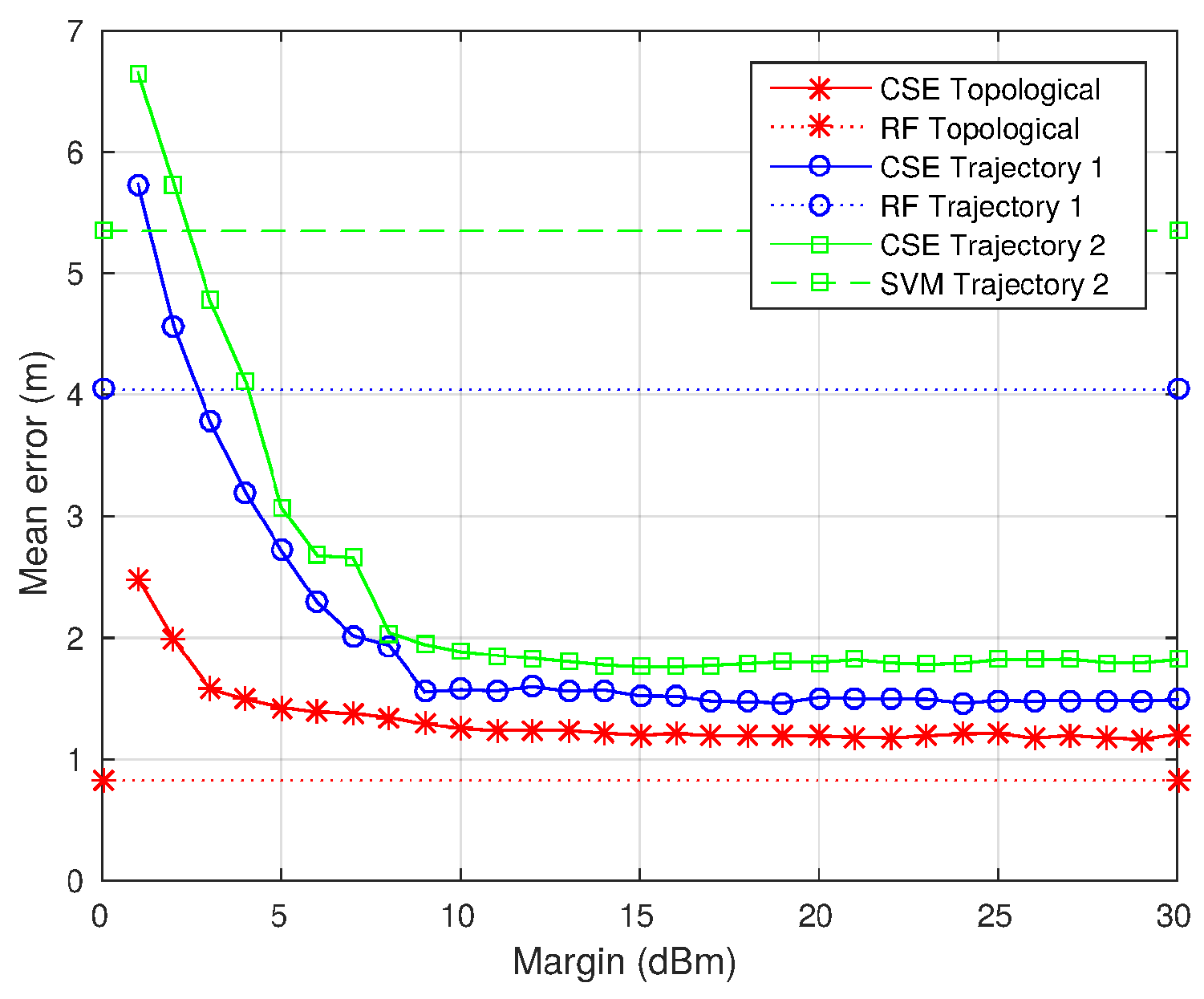
4.3.1. Noise Margin Evaluation
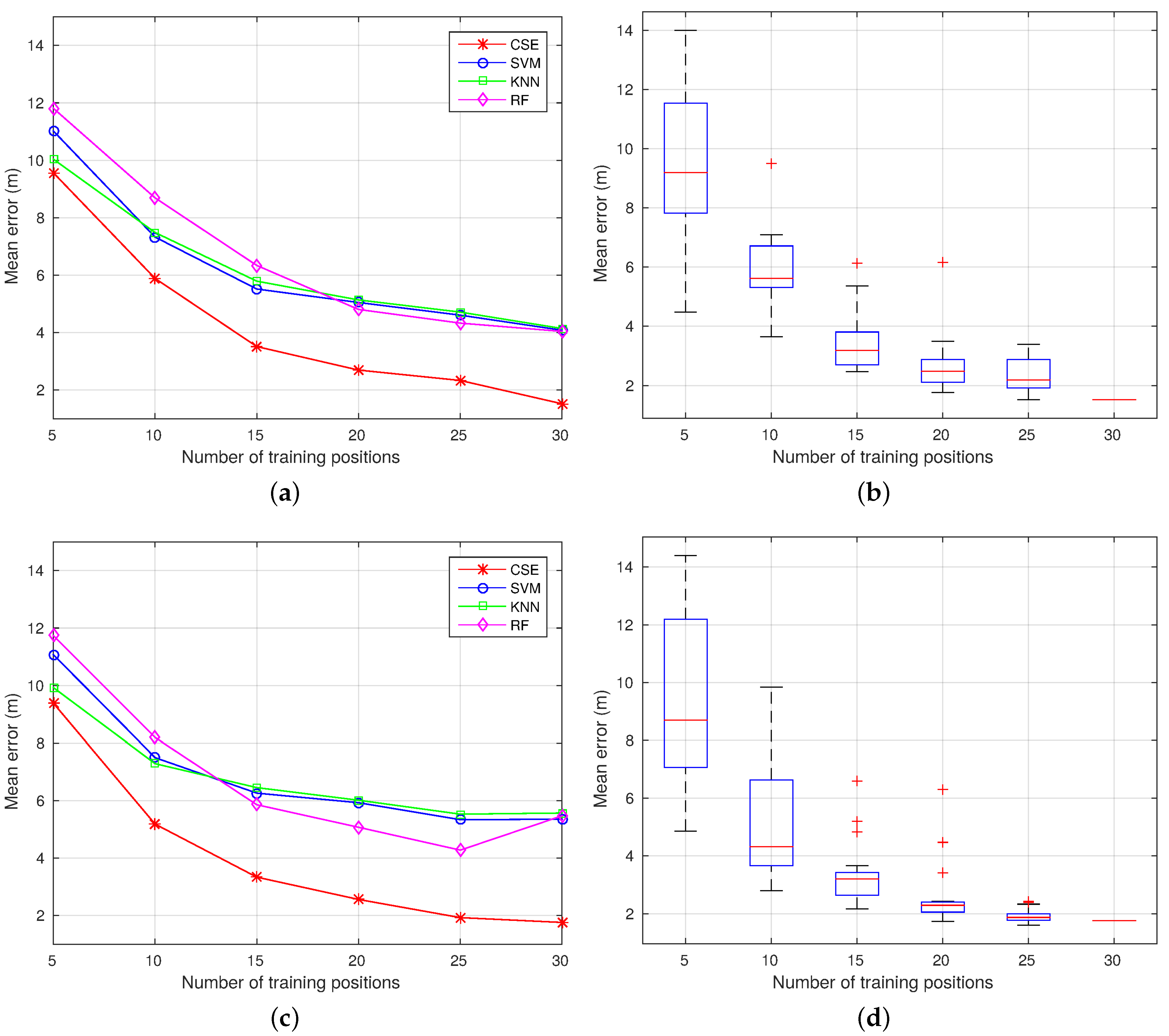
4.3.2. Training Resolution
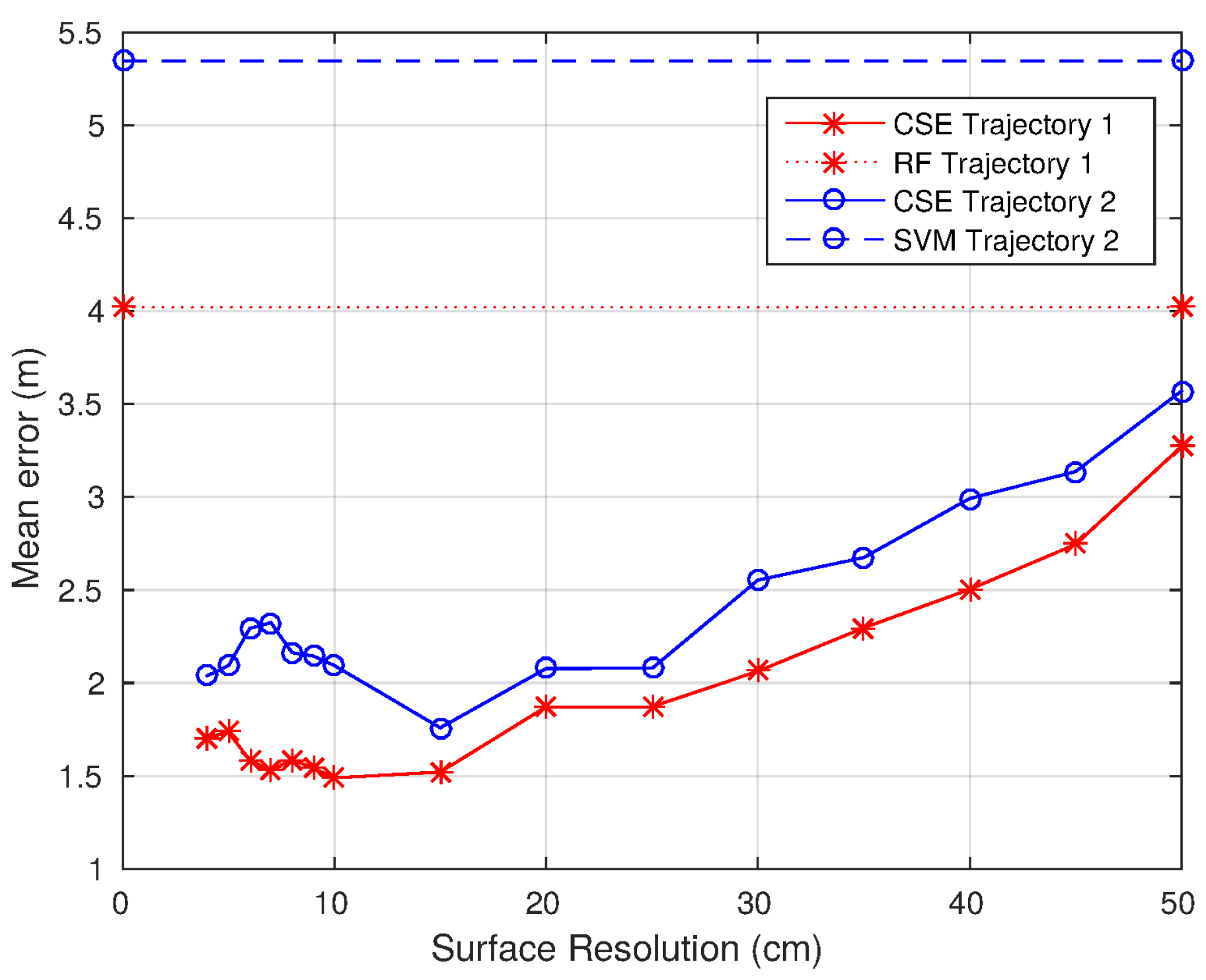
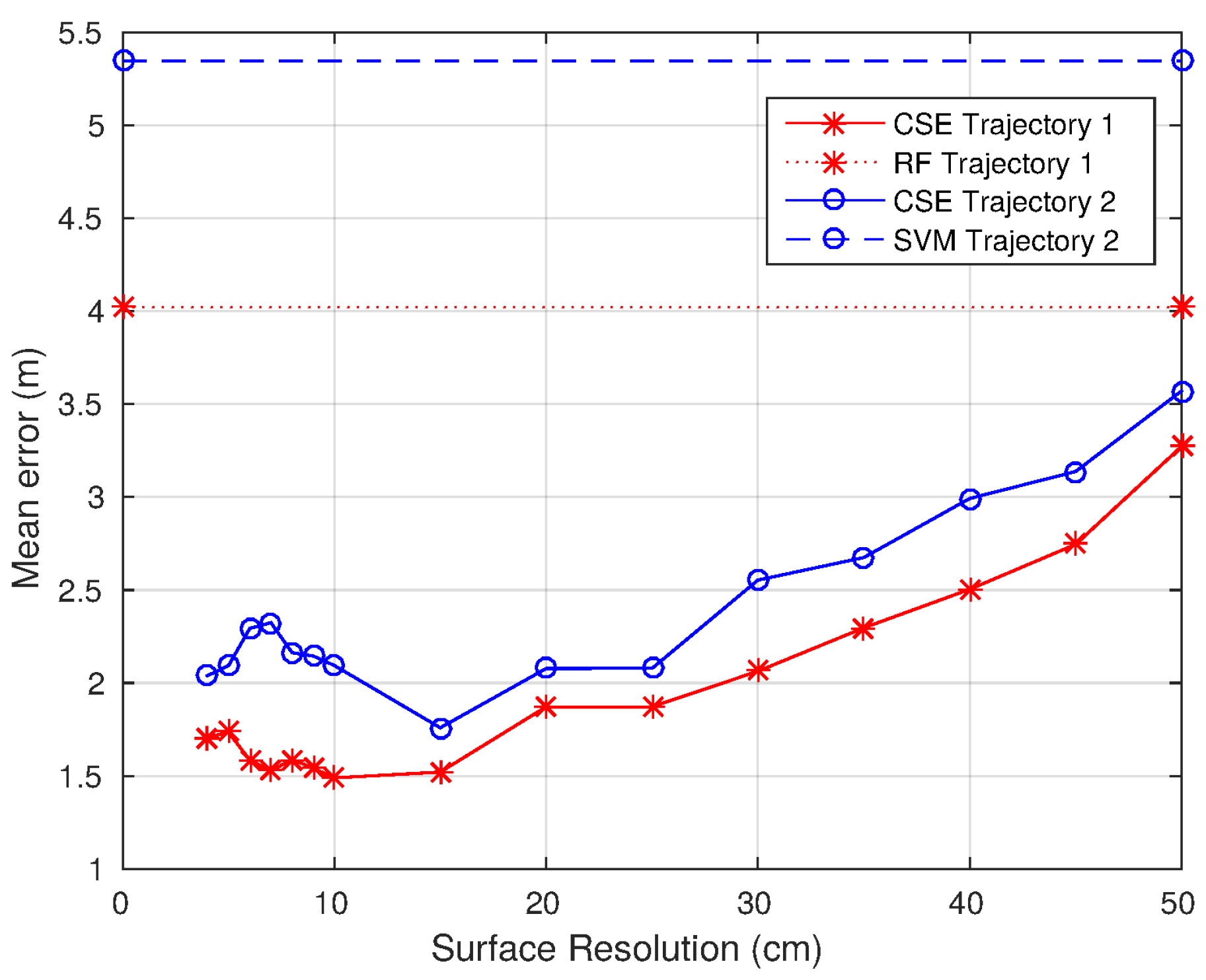
4.3.3. Reference Surfaces Resolution
4.4. Statistical Validation of the Reported Results
- Ranking: The means of the results achieved by two or more methods under consideration (CSE, RF, SVM and RADAR) are the same.
- Post-hoc with control method: The mean of the results of the control method and against each other group is equal (compared in pairs).
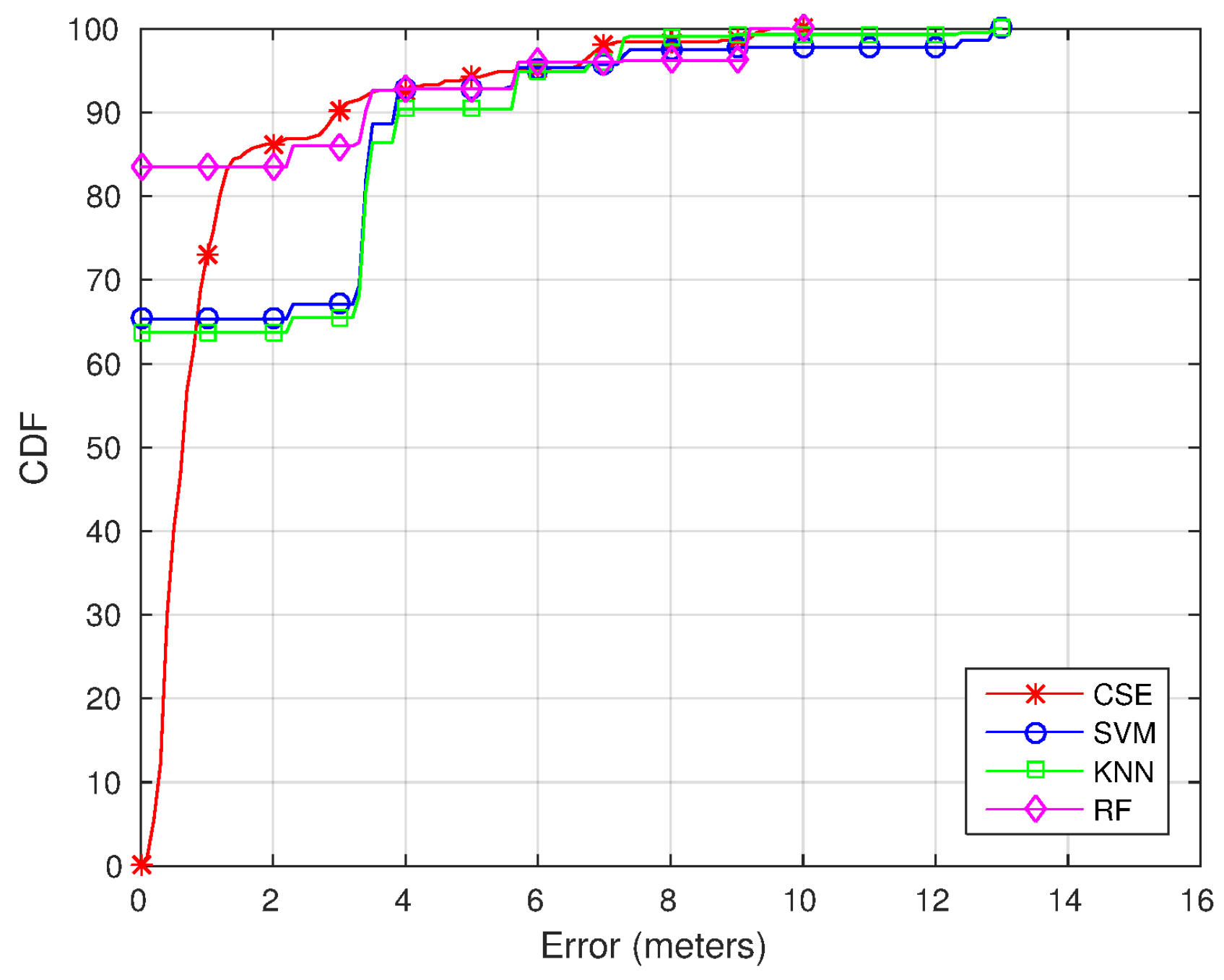
- CSE vs. RF: is rejected with the p-value equal to 0.00001.
- CSE vs. SVM: is rejected with the p-value equal to 0.00114.
- CSE vs. RADAR: is rejected with the p-value equal to 0.00061.
5. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- TNS, Kantar Group. Mobile Life Study. Available online: http://www.tnsglobal.com/press-release/two-thirds-world’s-mobile-users-signal-they-want-be-found (accessed on 12 January 2017).
- Cheng, H.; Arefin, M.S.; Chen, Z.; Morimoto, Y. Place Recommendation Based on Users Check-in History for Location-Based Services. Int. J. Netw. Comput. 2013, 3, 228–243. [Google Scholar]
- Pourhomayoun, M.; Jin, Z.; Fowler, M. Spatial sparsity based indoor localization in wireless sensor network for assistive healthcare. Conf. Proc. IEEE Eng. Med. Biol. Soc. 2012, 2012, 3696–3699. [Google Scholar] [PubMed]
- Ekahau. Wi-Fi Tracking Systems, RTLS and WLAN Site Survey. Available online: http://www.ekahau.com (accessed on 12 January 2017).
- Hammadi, O.A.; Hebsi, A.A.; Zemerly, M.J.; Ng, J.W.P. Indoor Localization and Guidance Using Portable Smartphones. In Proceedings of the IEEE/WIC/ACM International Conferences on Web Intelligence and Intelligent Agent Technology, Macau, China, 4–7 December 2012; Volume 3, pp. 337–341.
- Jeon, B.; Kim, R.Y.C. A System for detecting the Stray of Objects within User-defined Region using Location-Based Services. Int. J. Softw. Eng. Its Appl. 2013, 7, 355–362. [Google Scholar] [CrossRef]
- eCall. Available online: http://ec.europa.eu/digital-agenda/ecall-time-saved-lives-saved (accessed on 12 January 2017).
- Zhao, Z.; Zhang, X. An RFID-Based Localization Algorithm for Shelves and Pallets in Warehouse. In Proceedings of the International Conference on Transportation Engineering, Chengdu, China, 23–25 July 2011; pp. 2157–2162.
- Enge, P.; Misra, P. Special Issue on GPS: The Global Positioning System. Proc. IEEE 1999, 87, 3–15. [Google Scholar] [CrossRef]
- Want, R.; Hopper, A.; Falcão, V.; Gibbons, J. The Active Badge Location System. ACM Trans. Inf. Syst. 1992, 10, 91–102. [Google Scholar] [CrossRef]
- Priyantha, N.B.; Chakraborty, A.; Balakrishnan, H. The Cricket Location-support System. In Proceedings of the Annual International Conference on Mobile Computing and Networking, Boston, MA, USA, 6–11 August 2000; pp. 32–43.
- Barber, R.; Mata, M.; Boada, M.J.L.; Armingol, J.M.; Salichs, M.A. A perception system based on laser information for mobile robot topologic navigation. In Proceedings of the IEEE 2002 28th Annual Conference of the IEEE Industrial Electronics Society, Sevilla, Spain, 5–8 November 2002; Volume 4, pp. 2779–2784.
- Krumm, J.; Harris, S.; Meyers, B.; Brumitt, B.; Hale, M.; Shafer, S. Multi-Camera Multi-Person Tracking for EasyLiving. In Proceedings of the Third IEEE International Workshop on Visual Surveillance, Dublin, Ireland, 1 July 2000; pp. 3–10.
- Bahl, P.; Padmanabhan, V.N. RADAR: An In-Building RF-Based User Location and Tracking System. In Proceedings of the Annual Joint Conference of the IEEE Computer and Communications Societies, Tel Aviv, Israel, 26–30 March 2000; pp. 775–784.
- García-Valverde, T.; García-Sola, A.; Hagras, H.; Dooley, J.; Callaghan, V.; Botía, J.A. A Fuzzy Logic-Based System for Indoor Localization Using WiFi in Ambient Intelligent Environments. IEEE Trans. Fuzzy Syst. 2013, 21, 702–718. [Google Scholar] [CrossRef]
- Torres-Sospedra, J.; Mendoza-Silva, G.M.; Montoliu, R.; Belmonte, O.; Benitez, F.; Huerta, J. Ensembles of indoor positioning systems based on fingerprinting: Simplifying parameter selection and obtaining robust systems. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation, Alcalá de Henares, Madrid, Spain, 4–7 October 2016; pp. 1–8.
- Varshavsky, A.; de Lara, E.; Hightower, J.; LaMarca, A.; Otsason, V. GSM indoor localization. Pervasive Mob. Comput. 2007, 3, 698–720. [Google Scholar] [CrossRef]
- Huang, Q.; Zhang, Y.; Ge, Z.; Lu, C. Refining Wi-Fi based indoor localization with Li-Fi assisted model calibration is smart buildings. In Proceedings of the 2016 International Conference on Computing in Civil and Building Engineering, Osaka, Japan, 6–8 July 2016; pp. 1–8.
- Mautz, R. Indoor Positioning Technologies; Habilitation Thesis; ETH Zurich: Zürich, Switzerland, 2012. [Google Scholar]
- González, J.; Blanco, J.; Galindo, C.; de Galisteo, A.O.; Fernández-Madrigal, J.; Moreno, F.; Martínez, J. Mobile robot localization based on Ultra-Wide-Band ranging: A particle filter approach. Robot. Auton. Syst. 2009, 57, 496–507. [Google Scholar] [CrossRef]
- Wagner, S.; Handte, M.; Zuniga, M.; Marrón, P.J. Enhancing the performance of indoor localization using multiple steady tags. Pervasive Mob. Comput. 2013, 9, 392–405. [Google Scholar] [CrossRef]
- Seco, F.; Jiménez, A.R.; Zheng, X. RFID-based centralized cooperative localization in indoor environments. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation, Alcalá de Henares, Madrid, Spain, 4–7 October 2016; pp. 1–7.
- Choi, T.; Chon, Y.; Kim, Y.; Kim, D.; Cha, H. Enhancing WiFi-fingerprinting accuracy using RSS calibration in dual-band environments. Pervasive Mob. Comput. 2015, 392–405. [Google Scholar] [CrossRef]
- Hernández, N.; Alonso, J.M.; Ocaña, M.; Kim, E. WiFi-based indoor localization using a continuous space estimator from topological information. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Banff, AB, Canada, 13–16 October 2015; pp. 1–4.
- Indoor Google Maps. Available online: http://maps.google.com/help/maps/indoormaps/ (accessed on 12 January 2017).
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of Wireless Indoor Positioning Techniques and Systems. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Kotanen, A.; Hännikäinen, M.; Leppäkoski, H.; Hämäläinen, T.D. Experiments on Local Positioning with Bluetooth. In Proceedings of the International Conference on Information Technology: Coding and Computing, Las Vegas, NV, USA, 28–30 April 2003; pp. 297–303.
- Bose, A.; Foh, C.H. A practical path loss model for indoor WiFi positioning enhancement. In Proceedings of the International Conference on Information, Communications Signal Processing, Singapore, 10–13 December 2007; pp. 1–5.
- Mazuelas, S.; Bahillo, A.; Lorenzo, R.M.; Fernandez, P.; Lago, F.A.; Garcia, E.; Blas, J.; Abril, E.J. Robust Indoor Positioning Provided by Real-Time RSSI Values in Unmodified WLAN Networks. IEEE J. Sel. Top. Signal Process. 2009, 3, 821–831. [Google Scholar] [CrossRef]
- Yang, J.; Chen, Y. Indoor localization using improved RSS-based lateration methods. In Proceedings of the IEEE conference on Global Telecommunications, Honolulu, HI, USA, 30 November–4 December 2009; pp. 4506–4511.
- Herranz, F. Simultaneous Localization and Mapping Using Range Only Sensors. Ph.D. Thesis, University of Alcalá, Alcalá de Henares, Madrid, Spain, 2013. [Google Scholar]
- Yang, J.; Lee, H.; Moessner, K. Multilateration localization based on Singular Value Decomposition for 3D indoor positioning. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation, Alcalá de Henares, Madrid, Spain, 4–7 October 2016; pp. 1–8.
- Li, W.; Wei, D.; Yuan, H.; Ouyang, G. A novel method of WiFi fingerprint positioning using spatial multi-points matching. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation, Alcalá de Henares, Madrid, Spain, 4–7 October 2016; pp. 1–8.
- Youssef, M.; Agrawala, A. The Horus location determination system. Wirel. Netw. 2008, 14, 357–374. [Google Scholar] [CrossRef]
- Fang, S.H.; Lin, T.N. A dynamic system approach for radio location fingerprinting in wireless local area networks. IEEE Trans. Commun. 2010, 58, 1020–1025. [Google Scholar] [CrossRef]
- Biswas, J.; Veloso, M. WiFi localization and navigation for autonomous indoor mobile robots. In Proceedings of the IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 4379–4384.
- Schauer, L.; Marcus, P.; Linnhoff-Popien, C. Towards feasible Wi-Fi based indoor tracking systems using probabilistic methods. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation, Alcalá de Henares, Madrid, Spain, 4–7 October 2016; pp. 1–8.
- Wu, C.; Yang, Z.; Liu, Y.; Xi, W. WILL: Wireless indoor localization without site survey. IEEE Trans. Parallel Distrib. Syst. 2013, 24, 839–848. [Google Scholar]
- Wang, H.; Sen, S.; Elgohary, A.; Farid, M.; Youssef, M.; Choudhury, R.R. No Need to War-drive: Unsupervised Indoor Localization. In Proceedings of the International Conference on Mobile Systems, Applications, and Services, Lake District, UK, 25–29 June 2012; pp. 197–210.
- Rai, A.; Chintalapudi, K.K.; Padmanabhan, V.N.; Sen, R. Zee: Zero-effort Crowdsourcing for Indoor Localization. In Proceedings of the Annual International Conference on Mobile Computing and Networking, Istanbul, Turkey, 22–26 August 2012; pp. 293–304.
- Yang, Z.; Wu, C.; Liu, Y. Locating in Fingerprint Space: Wireless Indoor Localization with Little Human Intervention. In Proceedings of the Annual International Conference on Mobile Computing and Networking, Istanbul, Turkey, 22–26 August 2012; pp. 269–280.
- Schüssel, M.; Pregizer, F. Coverage Gaps in Fingerprinting Based Indoor Positioning: The Use of Hybrid Gaussian Processes. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation, Banff, AB, Canada, 13–16 October 2015; pp. 1–9.
- Richter, P.; Peña-Torres, A.; Toledano-Ayala, M. A Rigorous Evaluation of Gaussian Process Models for WLAN Fingerprinting. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation, Banff, AB, Canada, 13–16 October 2015; pp. 1–10.
- Chintalapudi, K.; Padmanabha Iyer, A.; Padmanabhan, V.N. Indoor Localization without the Pain. In Proceedings of the Annual International Conference on Mobile Computing and Networking, Chicago, IL, USA, 20–24 September 2010; pp. 173–184.
- Caso, G.; Nardis, L.D. On the Applicability of Multi-wall Multi-floor Propagation Models to WiFi Fingerprinting Indoor Positioning. In Future Access Enablers for Ubiquitous and Intelligent Infrastructures; Lecture Notes of the Institute for Computer Sciences, Social-Informatics and Telecommunications Engineering; Springer: Berlin/Heidelberg, Germany, 2015; Volume 159, pp. 166–172. [Google Scholar]
- Drucker, H.; Burges, C.J.C.; Kaufman, L.; Smola, A.; Vapnik, V. Support Vector Regression Machines. Adv. Neural Inf. Process. Syst. 1997, 9, 155–161. [Google Scholar]
- Karush, W. Minima of Functions of Several Variables with Inequalities as Side Constraints. Master’s Thesis, University of Chicago, Chicago, IL, USA, 1939. [Google Scholar]
- Kuhn, H.; Tucker, A. Nonlinear programming. In Proceedings of the Berkeley Symposium on Mathematical Statistics and Probabilistics, Berkeley, CA, USA, 31 July–12 August 1950; pp. 481–492.
- Rappaport, T.S. Wireless Communications: Principles and Practice, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1996. [Google Scholar]
- Kibler, D.; Aha, D. Learning representative exemplars of concepts: An initial case study. In Proceedings of the International Workshop on Machine Learning, Irvine, CA, USA, 22–25 June 1987; pp. 24–30.
- Wu, B.F.; Jen, C.L.; Chang, K.C. Neural fuzzy based indoor localization by Kalman filtering with propagation channel modeling. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, Montreal, QC, Canada, 7–10 October 2007; pp. 812–817.
- Cortes, C.; Vapnik, V. Support-Vector Networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Jedari, E.; Wu, Z.; Rashidzadeh, R.; Saif, M. Wi-Fi Based Indoor Location Positioning Employing Random Forest Classifier. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation, Banff, AB, Canada, 13–16 October 2015; pp. 1–5.
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Hall, M.; Frank, E.; Holmes, G.; Pfahringer, B.; Reutemann, P.; Witten, I.H. The WEKA Data Mining Software: An Update. SIGKDD Explor. 2009, 11, 10–18. [Google Scholar] [CrossRef]
- Witten, I.H.; Frank, E.; Hall, M.A. Data Mining: Practical Machine Learning Tools and Techniques, 3rd ed.; Data Management Systems Series; Morgan Kaufmann: Burlington, MA, USA, 2011. [Google Scholar]
- Youssef, M.; Agrawala, A. Small-Scale Compensation for WLAN Location Determination Systems. In Proceedings of the IEEE Wireless Communications and Networking, New Orleans, LA, USA, 16–20 March 2003; Volume 3, pp. 1974–1978.
- Friedman, M. The use of ranks to avoid the assumption of normality implicit in the analysis of variance. J. Am. Stat. Assoc. 1937, 32, 674–701. [Google Scholar] [CrossRef]
- Hodges, J.; Lehmann, E. Ranks methods for combination of independent experiments in analysis of variance. Ann. Math. Stat. 1962, 33, 482–497. [Google Scholar] [CrossRef]
- Holm, O. A simple sequentially rejective multiple test procedure. Scand. J. Stat. 1979, 6, 65–70. [Google Scholar]
- Rodríguez-Fdez, I.; Canosa, A.; Mucientes, M.; Bugarín, A. STAC: A web platform for the comparison of algorithms using statistical tests. In Proceedings of the 2015 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Istanbul, Turkey, 2–5 August 2015; pp. 1–8.
- Hernández, N.; Alonso, J.M.; Ocaña, M. Hierarchical Approach to Enhancing Topology-based WiFi Indoor Localization in Large Environments. J. Mult.-Valued Log. Soft Comput. 2016, 26, 221–241. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mean Error | ||||
|---|---|---|---|---|
| CSE | RF [53] | SVM | RADAR [14] | |
| Topological positions | 1.53 m | 0.83 m | 1.53 m | 1.56 m |
| Mean Error | ||||
|---|---|---|---|---|
| CSE | RF [53] | SVM | RADAR [14] | |
| Trajectory 1 | 1.52 m | 4.04 m | 4.08 m | 4.14 m |
| Trajectory 2 | 1.76 m | 5.47 m | 5.35 m | 5.57 m |
| All Positions | Config. 1 | Config. 2 | Config. 3 | Config. 4 | |
|---|---|---|---|---|---|
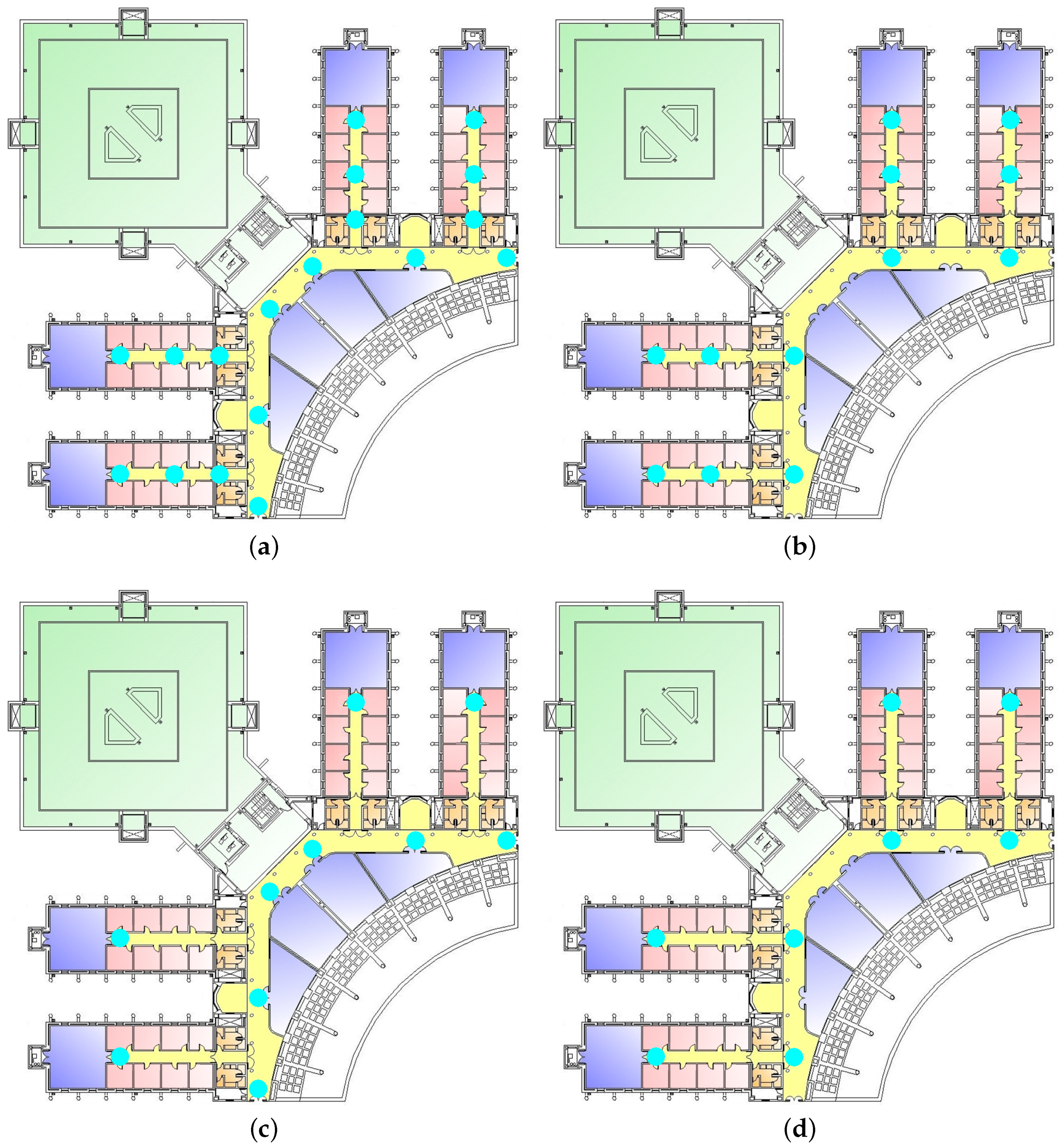
| Number of positions | 30 | 18 | 12 | 10 | 8 |
| Minimum distance between positions | 2.23 m | 5.50 m | 6.80 m | 8.00 m | 14.53 m |
| Mean distance between positions | 26.58 m | 27.46 m | 29.63 m | 29.75 m | 31.35 m |
| Mean Error | ||||||
|---|---|---|---|---|---|---|
| All Pos. | Config. 1 | Config. 2 | Config. 3 | Config. 4 | ||
| Trajectory 1 | CSE | 1.52 m | 1.71 m | 3.38 m | 3.39 m | 4.02 m |
| RF [53] | 4.04 m | 4.31 m | 8.79 m | 6.56 m | 6.10 m | |
| SVM | 4.08 m | 4.93 m | 5.16 m | 5.97 m | 5.63 m | |
| RADAR [14] | 4.14 m | 4.20 m | 5.69 m | 6.06 m | 6.16 m | |
| Trajectory 2 | CSE | 1.76 m | 2.01 m | 2.80 m | 3.67 m | 3.57 m |
| RF [53] | 5.47 m | 5.67 m | 9.18 m | 8.43 m | 5.87 m | |
| SVM | 5.35 m | 5.65 m | 6.24 m | 6.06 m | 6.06 m | |
| RADAR [14] | 5.57 m | 5.90 m | 6.40 m | 6.45 m | 5.94 m | |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hernández, N.; Ocaña, M.; Alonso, J.M.; Kim, E. Continuous Space Estimation: Increasing WiFi-Based Indoor Localization Resolution without Increasing the Site-Survey Effort. Sensors 2017, 17, 147. https://doi.org/10.3390/s17010147
Hernández N, Ocaña M, Alonso JM, Kim E. Continuous Space Estimation: Increasing WiFi-Based Indoor Localization Resolution without Increasing the Site-Survey Effort. Sensors. 2017; 17(1):147. https://doi.org/10.3390/s17010147
Chicago/Turabian StyleHernández, Noelia, Manuel Ocaña, Jose M. Alonso, and Euntai Kim. 2017. "Continuous Space Estimation: Increasing WiFi-Based Indoor Localization Resolution without Increasing the Site-Survey Effort" Sensors 17, no. 1: 147. https://doi.org/10.3390/s17010147