1. Introduction
Force feedback is important to control robotic manipulation, especially when a robotic manipulator interacts with unstructured environments or unknown objects [
1]. In case of grasp motion of humanoids and surgical robots, it is necessary to measure not only contact force, but also contact location of the exerted force for grasping delicately with an end-effector [
2,
3,
4]. Fingertip force torque sensors were used for measuring three dimensional force and torque to control the fingers that interacted with environment [
5]. In other cases, a manipulator like a robot arm measured external force by using a sensitive skin in order to avoid collisions [
6]. Using tactile sensors is one way to get the force information. There are four popular transducing strategies for the tactile sensors: capacitive, resistive, peizoresistive and optical [
1].
Capacitive sensors consist of a pair of conductive plates and dielectric substance that separates the conductive plates. The external force causes a change in the gap between the conductive plates, which induce the change in capacitance [
1]. Mannsfeld and Schwartz in Bao’s group reported highly sensitive flexible electronic skins formed by micro-structured capacitive sensors [
7,
8]. The sensor has high sensitivity due to the special micro-structured film. In general, the output signal of capacitive type sensors is small and susceptible to external noise such as parasitic capacitance. The disturbance caused by the parasitic capacitance is uncertain and tends to return wrong contact force sensing data. A special circuit is required to amplify the signal near the transducer and eliminate the effect of the parasitic capacitance between the sensor and objects.
Resistive sensors perceive mechanical deformation by measuring a change in resistance. Choi et al. reported a micro-machined flexible tactile sensor for three-axial loads detection [
9]. A patterned sensing element such as a strain gauge was deposited on a polyimide film. The sensing element was covered with a single silicone bump to concentrate the force. Kim et al. introduced a highly sensitive resistive type single-axis tactile sensor with liquid pocket [
10]. All layers in the sensor were made of silicone which is easy to deform by the external force because of its low elastic modulus. The liquid pocket was used to distribute the concentrated external force over the flexible sensing structure. Recently, liquid metal alloy has been used for wires in MEMS applications. Deformation of liquid metal shape induce the change in resistance. Park et al. fabricated soft artificial skin by using eutectic gallium-indium (eGaIn) [
11]. Wong et al. used galinstan to fabricate flexible microfluidic normal force sensor skins [
12].
The piezoresistive effect is a change in the electrical resistance caused by mechanical deformation of a material [
1]. Several types of piezoresistive materials have been used for developing piezoresistive sensors (e.g., piezoresistive foam [
13], piezoresistive rubber [
14], etc.). Piezoresistive sensors have advantages of simple manufacturing processes, low noise, and low cost. Also some of them are commercially available. However, non-linear response and large hysteresis are disadvantages of piezoresistive sensors. Both resistive sensors and piezoresistive sensors also need a signal conditioning circuit such as an analog to digital converter [
15], though their circuitry is much simpler than that of capacitive sensors.
Optical sensors detect mechanical deformation based on the optical reflection between media with different refractive indices [
1]. Kampmann et al. reported fiber-optic sensor arrays. The sensor consisted of light sources, optical fibers and camera chips [
16]. Ohka et al. introduced an optical three-axis tactile sensor capable measuring normal and shearing force [
17]. Optical sensors are highly sensitive, have high spatial resolution and are immune to electromagnetic interference, however, they are in generally bulky in size. Broader reviews of tactile sensing technologies are available in [
1,
18].
Signal conditioning circuitry is one of the issues for developing the tactile sensors. Sensor devices must provide signals that can be detected by readout electronics. Furthermore, scalability and flexibility are important features for a skin-like force sensor [
14]. Especially, the flexibility is essential for operating the tactile sensors on any type of surface. However, it is difficult to extend the transducers into flexible sensor devices because embedding the flexible circuit into the sensor devices is not easy. In addition, initial state of those all flexible tactile sensors must be calibrated when curvature of the attaching surface changes. Because the sensors are affected by the initial geometric shape.
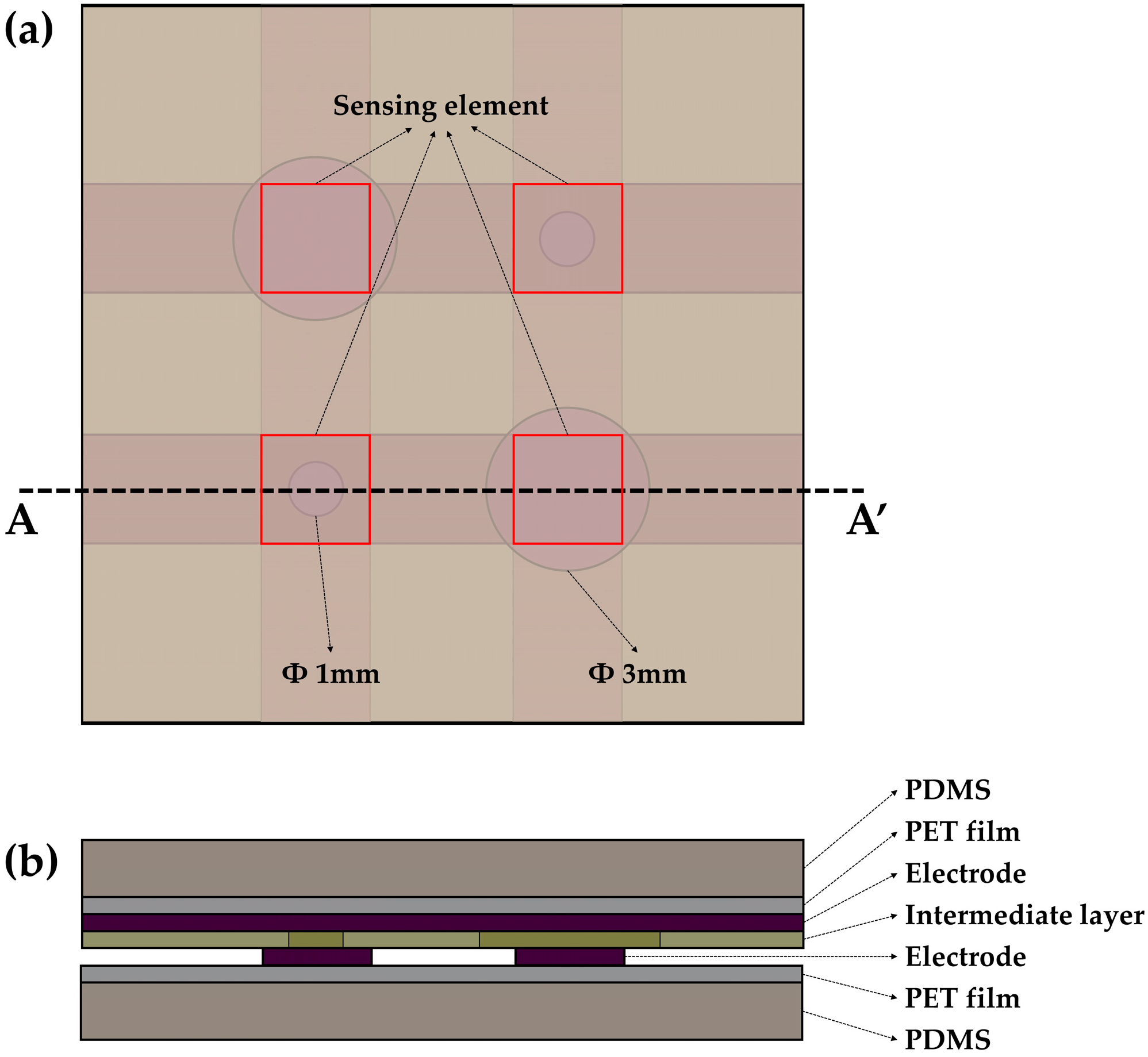
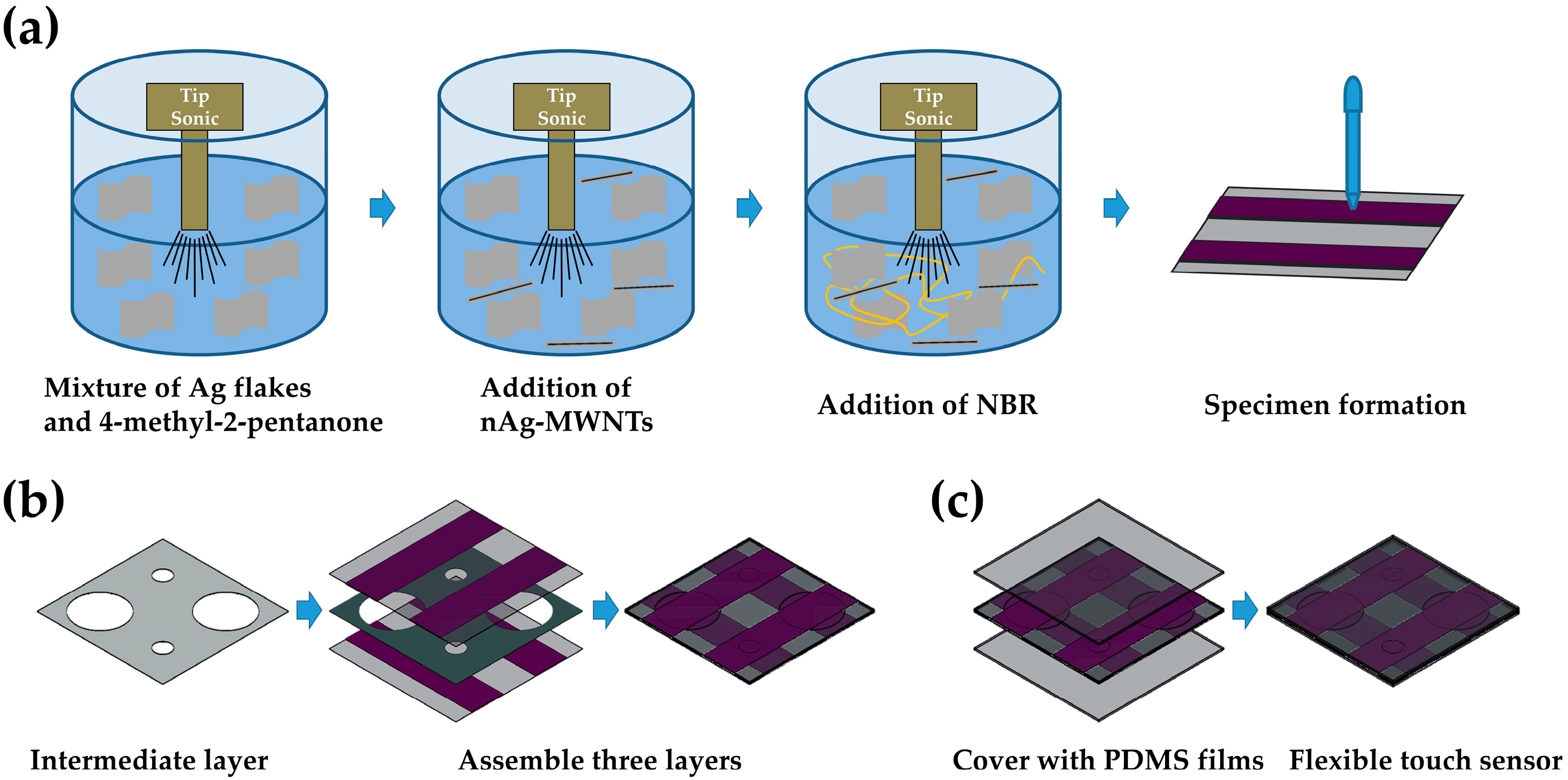
In this paper we present a flexible touch sensor which is fabricated with little effort by a printing method with ink-type conductive adhesives. A sensing cell in the sensor consists of a circular hole and two electrode layers, which constitutes a switching mechanism. The different sizes of the circular holes make the sensor respond to different levels of external pressure. The proposed sensor does not require any complex amplifying circuits due to this sensing mechanism. The complexity of the fabrication process is considerably reduced through the use of a printing method for electrode fabrication. This characterization is enhanced in mass production with scalability. Also, the touch sensor is sustainable on the various curved surfaces due to its flexibility. There is a limitation that the touch sensor can only provide low number of discretized force value measurements.
The remaining part of the paper is organized as follows: we show the design and the details of the fabrication process of the proposed sensor in
Section 2, describe the experimental system and results in
Section 3, and provide the conclusions in
Section 4.
3. Results and Discussion
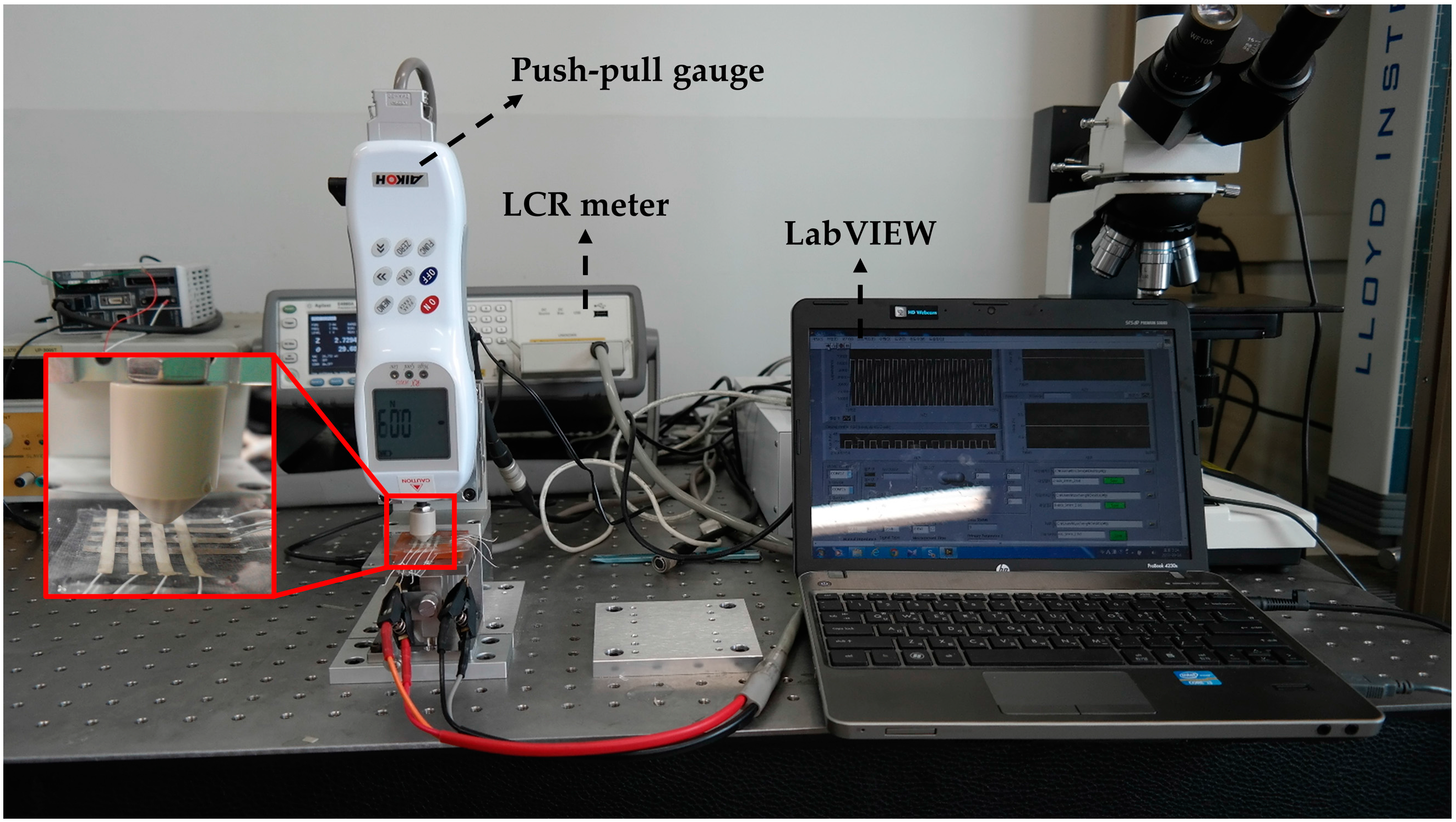
An experimental system consisted of a push-pull gauge (RX-2, Aikoh, Osaka, Japan), a LCR meter (E4980A Precision LCR meter, Agilent, Santa Clara, CA, USA) and a laptop equipped with LabVIEW software (National Instruments, Austin, TX, USA) as shown in
Figure 4. External load was applied on the sensor in a downward direction by the push-pull gauge. The push-pull gauge was mounted on the motorized linear guide. The force resolution of the push-pull gauge is 10 mN. Resistance of the sensor was measured by LCR meter with 1 V @ 100 kHz and Cp-Rp function. The measured resistance data was transmitted to the computer via a LAN cable. The LabVIEW software was used for collecting and saving the data. This software also, displayed the output data in real time.
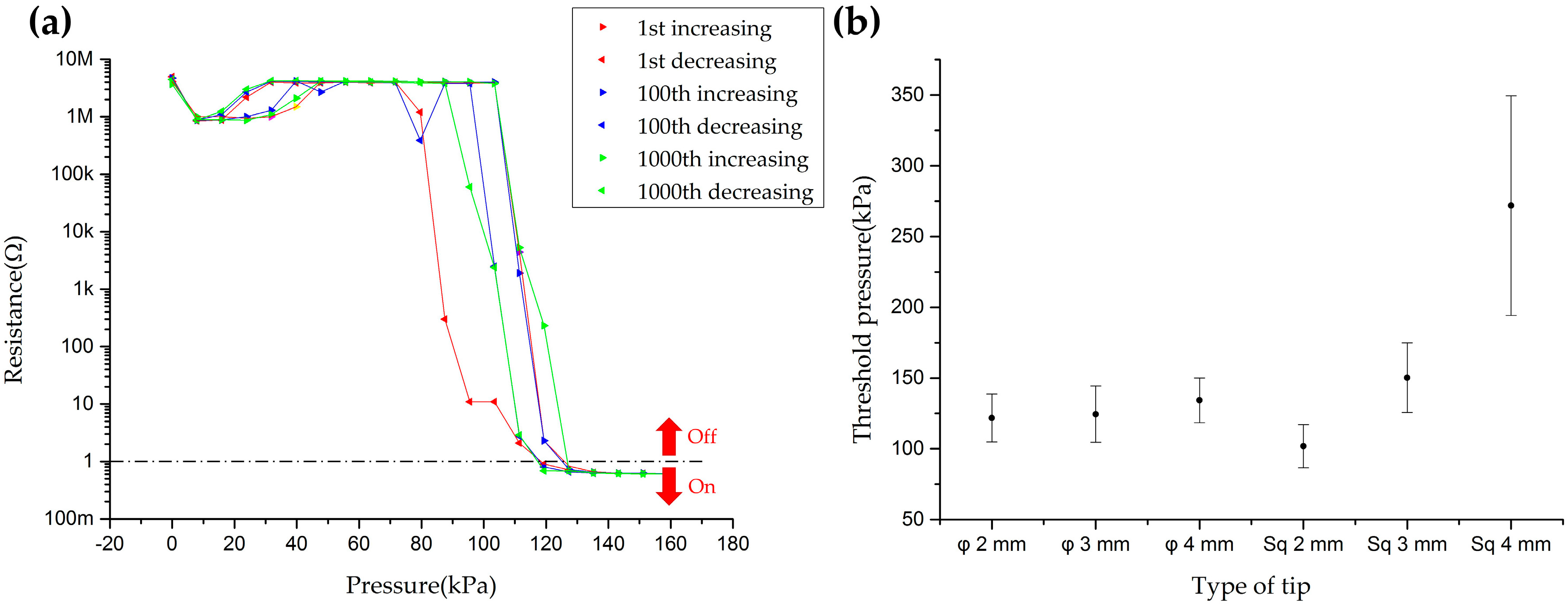
The performance of the cells with diameter 1 mm was verified as shown in
Figure 5. First, the 1 mm diameter cell was tested by repeated experiments to check the durability and the hysteresis of the sensor. Normal pressure ranging from 0 to 160 kPa was exerted and released for 1000 cycles on the cell with a circular-shaped flat Ø 4 mm tip. The exerting/releasing cycle was automatically repeated by a motorized linear stage. In case of the 1st, 100th and 1000th exerting/releasing cycles, resistance values were recorded at specific pressures with a logarithmic scale as shown in
Figure 5a. This result shows the sensor can endure a repeated mechanical stimulus more than 1000 times with low hysteresis. Criteria of on/off state was chosen as 1 Ω in order to describe threshold pressures. The threshold pressures of the 1 mm diameter cell were determined as 127.32 kPa with increasing force and 111.40 kPa with decreasing force. Next, effect of contact area on a single cell was tested. Four cells of the 1 mm diameter cells were performed by various tips: 2 mm × 2 mm, 3 mm × 3 mm and 4 mm × 4 mm square-shaped flat tips and Ø 2 mm, Ø 3 mm and Ø 4 mm circular-shaped flat tips. The sizes of the circular and square tips were chosen under 4 mm because the proposed sensor has 4 mm spatial resolution.
Figure 5b shows the results of this experiment with average and standard deviation of threshold pressures. Except for the result of test that conducted with 4 mm × 4 mm square-shaped flat tip, average threshold pressures were in the range from 100 kPa to 150 kPa. The low spatial resolution can cause the threshold pressure to be off the trend like the experimental result of the threshold pressure with the 4 mm × 4 mm square-shaped flat tip. Furthermore, to figure out the maximum pressure tolerance of the proposed sensor, up to 20 N load (that is the maximum tolerance force of our push-pull gage) was exerted with the Ø 2 mm circular-shaped flat tip. The result was that the sensor endures the pressure over 6.36 MPa, which exceeds our interested pressure range, approximately 35–220 kPa (15–90 g·wt. [
18]).
To demonstrate the relation between the hole size and the threshold pressure, a sensor that consists of six cells with different hole sizes was tested; the hole diameters were from 0.5 mm to 3.0 mm with 0.5 mm intervals. Three trials were conducted with each cell to obtain threshold pressures. For this experiment we used two circular-shaped flat tips with Ø 0.3 mm and Ø 4 mm diameters. As shown in
Figure 6, when the load was applied with the circular-shaped flat Ø 0.3 mm tip whose diameter is smaller than the minimum hole size, the threshold pressures of all cells were around 2 kPa. On the other hand, when the cell was exerted with the circular Ø 4 mm tip whose diameter is larger than the maximum hole size, threshold pressure of each cell increased from 2.91 kPa to 214 kPa as size of the holes decreased.
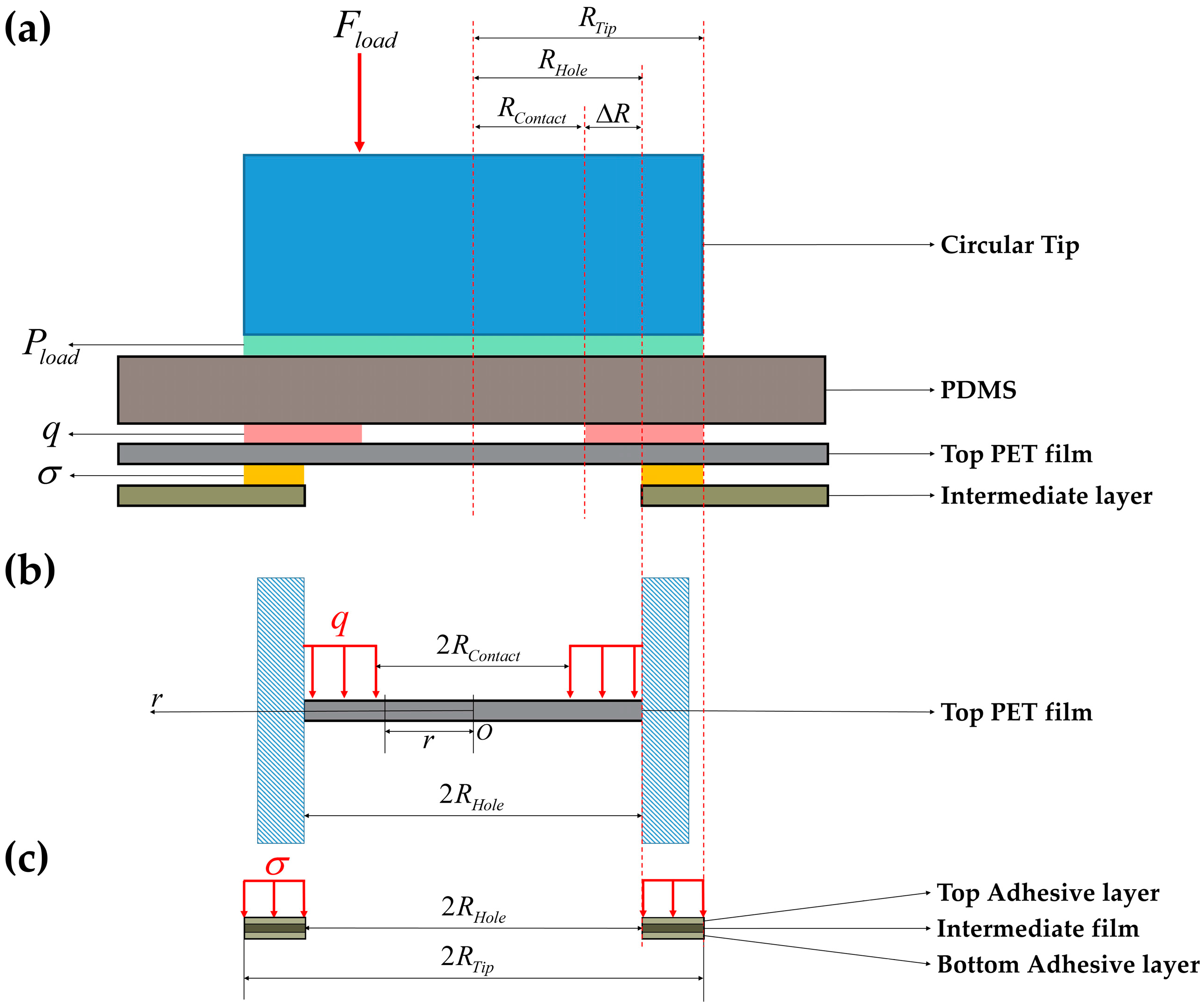
We present a simple analytical model for the relation between the hole size and threshold pressure by simplifying and some assumptions. We assume that the diameter of the circular tip is larger than the hole size. A Young’s modulus of PET film is about 2.3 GPa [
22] and Young’s modulus of PDMS was measured as 1.189 MPa. The PET film and PDMS film are detachable, because they were not bonded together in fabrication. Because the PET film is even stiffer than the PDMS film and they are detachable, it is obvious that the pressure is distributed on the deformable region of the PET film as shown in
Figure 7a. To simplify the model, we did not consider electrodes and assumed that the exerted pressure is uniformly distributed over the PET film as follows:
where
is the radius of the circular-shaped flat Ø 4 mm tip and
is the radius of the circular boundary between the loaded and the unloaded region in the PET film.
According to the theory of the plates, deflection of axis-symmetry circular plates is obtained from the following:
where,
is radial distances of points in the middle plane of PET film,
is the deflections in the downward direction,
is bending moment per unit length,
is shearing force per unit length and
is flexural rigidity [
23]. In Equation (4), the PET film properties are as follows: thickness
, Young’s modulus
[
22] and Poisson’s ratio
[
24]. By the force analysis in
Figure 7b, the shearing force is obtained as shown in Equation (5):
Using Equations (2) and (5),
,
and
were calculated as follows:
where
are integral coefficients. The boundary conditions for edge of the PET film are clamped edge and can be represented as Equation (9):
The deflection should be continuous and smooth, so the values of
and
are identical to zero at
, and additionally
at
. Also the bending moment
should be equal at
. Using these conditions and Equations (3) and (6)–(9), integral coefficients were determined as follows:
Thus, the maximum deflection occurs at
and it was obtained as Equation (11):
Equation (11) is the result when adhesive layers in
Figure 7c are treated as a rigid body. However, deformation of the adhesive layers causes additional deflection of the PET film. This deformation was also simplified as shown in
Figure 7c. In this model, uniformly distributed pressure which is applied on the adhesive layer is as follows:
The deformation of the adhesive layer was calculated by well-known Hooke’s law:
where
is the thickness of the adhesive layers and
is the change in the thickness.
is 9 μm when the sensor is not loaded. We assumed that the additional deflection
and the deformation of the adhesive layer
are roughly similar to:
Using Equations (11)–(15), the additional deflection was obtained as follows:
The proposed sensor is symmetric with respect to the intermediate layer, which means that the deformation of the lower layers and upper layers are the same. When a total deformation
, the sum of these deformation, is equal to 30 μm, two electrodes are connected, therefore we have that:
According to Equations (11), (16) and (17), the threshold pressure was obtained as follows:
represents the contact region between PET film and PDMS film, and is equal to
as shown in
Figure 7a. We assume that Δ
R (mm) increases linearly from 0.25 mm to
a (mm) as
RHole increases from 0.25 mm to 3 mm as follows:
Young’s modulus of the adhesive in Equation (18) and constant
a in Equation (19) are unknown. Therefore the simple analytical model was fitted with these two constant variables by using the least-squares percentage regression [
25]. The least-squares percentage regression is a method that minimizes the sum of relative errors, which is:
As the adhesive layer is predicted to be softer than the PDMS,
was chosen in the range of 100–800 kPa with the interval of 1 kPa. The constant
a was chosen in the range of 0.25–0.4 mm with the interval of
mm. As
does not exist at Δ
R = 0.25 mm, all terms of 0.25 mm in Equation (19) were changed to 0.24999 for computation. By complete enumeration survey in the previous range, the constants obtained:
a was 0.3174 and
EAdhesive was 186 kPa with 0.9406 of
S. This result is shown in
Figure 6. Thus, the threshold pressure is a function of the hole size. The threshold pressure deceases as the size of the hole continues to increase.
The proposed tactile sensor was tested on curved surfaces. The threshold pressure of sensors with 1 mm diameter and 3 mm diameter holes was measured on the various curved surfaces as shown in
Figure 8. The tactile sensor was placed on the surface of a cylindrical rod. Then, normal pressure was exerted on the single cell by the circular-shaped Ø 4 mm flat tip. The threshold pressure was almost invariant in each cell as the radius of curvature decreases up to 60 mm. This result is shown in
Figure 8.
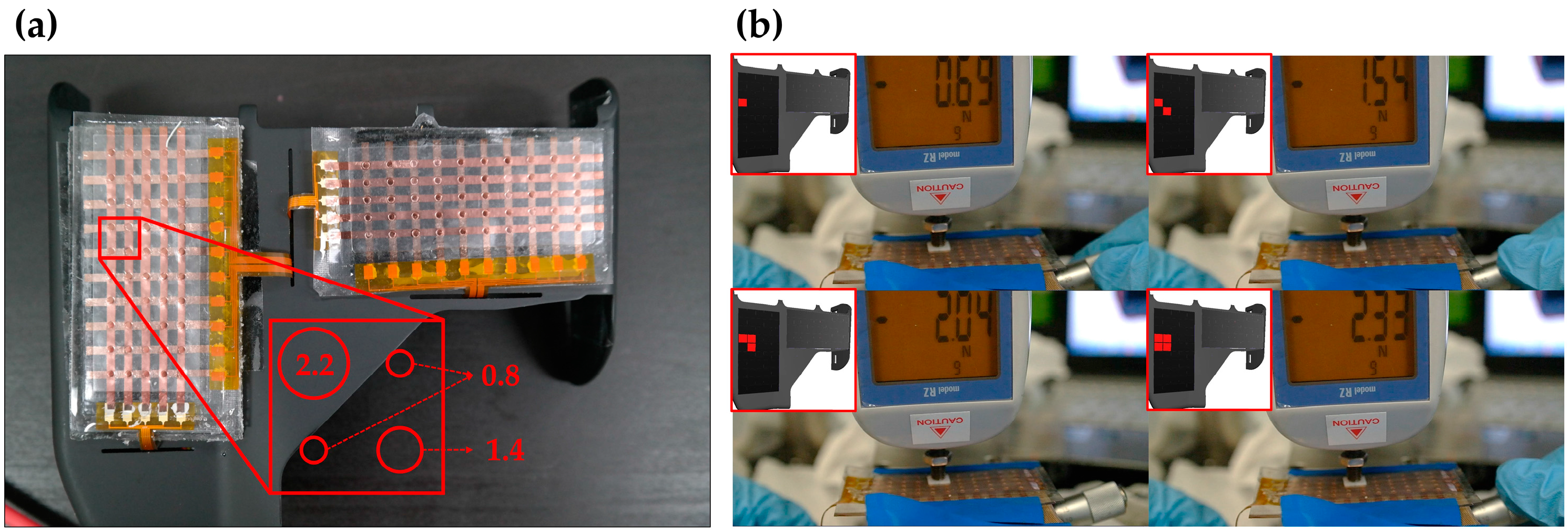
As discussed, the threshold pressure decreased with increasing hole size. This mechanism can be easily extended to multiple force level touch sensors which we call digital type touch sensors as shown in
Figure 9a. Electrodes of this digital type touch sensor were fabricated with Cu/Cr by the thermal evaporation method to show that the design concept can be applied with conventional fabrication methods. To increase sensitivity and reliability, we implemented cylindrical bumper structure with 1.5 mm diameter and 0.2 mm height in the top PDMS layer. The cylindrical bumper structure was vertically aligned between the top PDMS layer and the bottom PET film on each cell. The intermediate layer of the extended sensor has three different hole diameters, 2.2 mm, 1.4 mm and 0.8 mm. The force was applied on four cells at the same time using a square-shaped flat 20 mm × 20 mm tip. In accordance with the sizes of the holes, the threshold force in each cell was 0.69 N, 1.54 N, and 2.04–2.33 N as shown in
Figure 9b.


 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}